The CAN Bus From its Early Days to CAN FD By Friedhelm Pickhard (ETAS/P)
|
|
|
- Ann McDonald
- 5 years ago
- Views:
Transcription

")



1 By Friedhelm Pickhard (ETAS/P) 1
2 ETAS Introduction to ETAS Group ETAS Group Corporate Profile Founded 1994 Shareholder Headquarters 100 % Robert Bosch GmbH Stuttgart, Germany 18 additional offices worldwide Areas of Application Product Solutions Function & Software Development Function & SW Development Test & Validation Measurement & Calibration Prototyping Operating Systems & AUTOSAR RTE Test & Val. Meas. & Cal. ASCET INTECRIO EHOOKS RTA-OSEK ES900 LABCAR Testing Systems INCA ES400 & ES600 ES500 ES700 ETK/XETK ECU Access & ECU Hardware ES1000 RTPRO-PC 2
3 Agenda 1 The History of CAN 2 3 CAN as Enabler for E/E-Evolution CAN Quo Vadis? 3



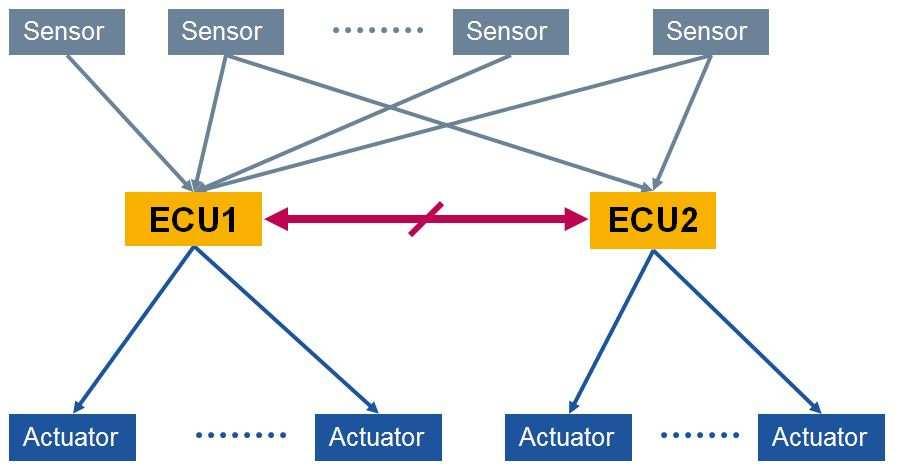
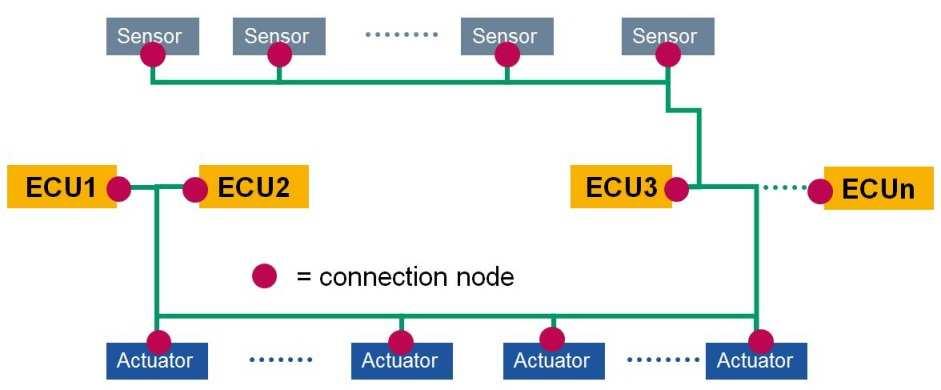
4 The Idea of a Serial Bus System From discrete interconnections towards bus topologies Source: Bosch 2008,Falkultätskolloquium Dr. S. Dais 4

5 Historical Outline Bosch start development on CAN CAN patent filed CAN published at SAE congress Detroit First CAN chips from Intel and Philips CAN introduced first in weaving machines First Mercedes-Benz S-class with CAN Foundation of CAN in Automation Standardization of CAN in ISO CANopen protocol published by CiA Introduction of TTCAN Specification of several ISO x: data link layer high-speed physical layer fault-tolerant physical layer TTCAN low-power mode selective wake-up Invention of CAN FD (ISO ) Source: CiA 5
6 The Spread of the CAN Bus System The triumphant success of CAN: Field bus systems in automation technology Aeronautic technologies (Networking of avionic systems) Medical technology (Communication between medical devices) Agricultural machinery and railway technology Building technology (Control of elevators) Consumer goods area (Washing machines, stoves, and products in consumer electronics) 6
7 Agenda 1 The History of CAN 2 3 CAN as Enabler for E/E-Evolution CAN Quo Vadis? 7

 Engine")
 ABS/ASR")

8 The First In-vehicle CAN Bus Daimler S class W140 (1991) Engine Control (fuel injection) ABS/ASR Source: Daimler AG Transmission Control and Ignition 8


9 Increase of In-Vehicle Bus Communication Source: VW 2005, Fachkongreß Automobil-Elektronik Source: NEC, 2006; Bosch Source: Daimler-Chrysler 2004; Philips Source: BMW, Frischkorn, BoCSE









10 Today s CAN Bus Architecture CGW Body Powertrain Vehicle Motion & Safety Infotainment CGW CAN LIN FlexRay MOST Central Gateway 10

11 The Success Factors of the CAN Technology 1. First real protocol bus in the vehicle, allowing complex functionality while reducing the need for wiring 2. The open license policy of Bosch drove fast availability of CAN on chip on the market 3. CAN is low-cost and requires small silicon area and low computing power 4. Compared to time-triggered protocols, CAN has a low planning effort and is highly flexible in adding unplanned nodes to the network 5. CAN resolves network collision via bit arbitration, such that the message with higher priority is sent 11
12 Agenda 1 The History of CAN 2 3 CAN as Enabler for E/E-Evolution CAN Quo Vadis? 12
13 Complexity and Number of Functions Source: Bundesminsterium für Wirtschaft und Technik: ecar-ikt-systemarchitektur für Elektromobilität 13
14 Data Rates and Implementation Cost Source: Robert Bosch Automotive Electronics: Can FD CAN with Flexible Data-rate (2011) 14
15 Possible Future E/E-Architecture with CAN FD Domain architecture with Ethernet Back-Bone Ethernet (CGW) optional Domain-Backbone CAN(FD) Vehicle CU CAN(FD) Inverter, DC/DC CU Ethernet DAS 2) Ethernet Audio/Video Battery message CU Charger CU REX 1) CU SEN 1 SEN 2 SEN 3 Cam 3) 1 Cam 2 Body & Cabin Powertrain Vehicle Motion & Safety Cockpit & Infotainment.. 1) Range Extender 2) Driver Assistant System 3) Camera for top view 15

16 Challenges of High-Speed Communication Networks Classical System CPU Control Plane Data Plane ETAS Data Engine CPU Control Plane HW Security ETAS Data Engine Data Plane CAN Controller FlexRay Controller Ethernet MAC CAN Controller FlexRay Controller Ethernet MAC Data Plane and Control Plane in sw CPU controls directly the communication controller High, variable latency, high jitter, low throughput Low performance data handling with high CPU load Data Plane implemented in hw CPU controls directly the hw engine Low, constant latency (< 5µs), negligible jitter, high throughput (up to 3 Gbit/s High performance data handling with minimum CPU load 16

17 Future Trends and Bus Technologies 17

")
18 By Friedhelm Pickhard (ETAS/P) Thank You! 18
Automotive and industrial use cases for CAN FD
 Improved CAN Automotive and industrial use cases for CAN FD Dr. Tobias Lorenz Author Dr. Tobias Lorenz Etas GmbH PO Box 300220 DE-70442 Stuttgart Tel.: +49-711-89661-0 Fax: +49-711-89661-107 tobias.lorenz@etas.com
Improved CAN Automotive and industrial use cases for CAN FD Dr. Tobias Lorenz Author Dr. Tobias Lorenz Etas GmbH PO Box 300220 DE-70442 Stuttgart Tel.: +49-711-89661-0 Fax: +49-711-89661-107 tobias.lorenz@etas.com
Introduction of CAN FD into the next generation of vehicle E/E architectures
 Introduction of CAN FD into the next generation of vehicle E/E architectures 16 th international CAN Conference, March 7-8 2017, Nuremberg Marc Schreiner, Daimler AG Agenda Introduction Future Vehicle
Introduction of CAN FD into the next generation of vehicle E/E architectures 16 th international CAN Conference, March 7-8 2017, Nuremberg Marc Schreiner, Daimler AG Agenda Introduction Future Vehicle
Introduction of CAN FD into the next generation of vehicle E/ E architectures. Vector CAN FD Symposium 2017, Marc Schreiner, Daimler AG
 Introduction of CAN FD into the next generation of vehicle E/ E architectures Vector CAN FD Symposium 2017, 16.2.2017 Marc Schreiner, Daimler AG Agenda Introduction Future Vehicle Architectures Integration
Introduction of CAN FD into the next generation of vehicle E/ E architectures Vector CAN FD Symposium 2017, 16.2.2017 Marc Schreiner, Daimler AG Agenda Introduction Future Vehicle Architectures Integration
CAN bus and NMEA2000 1
 NMEA2000 relation to CAN and how Warwick Control can help Richard McLaughlin B.Sc., M.Sc., CEng Dr Chris Quigley Warwick Control NMEA Conference 2016, Naples, Florida CAN bus and NMEA2000 1 Company Profile
NMEA2000 relation to CAN and how Warwick Control can help Richard McLaughlin B.Sc., M.Sc., CEng Dr Chris Quigley Warwick Control NMEA Conference 2016, Naples, Florida CAN bus and NMEA2000 1 Company Profile
Virtual Hardware ECU How to Significantly Increase Your Testing Throughput!
 Virtual Hardware ECU How to Significantly Increase Your Testing Throughput! Elektrobit Tech Day Jason Niatas Synopsys Inc. July 27, 2017 2017 Synopsys, Inc. 1 Agenda Automotive electronic evolution and
Virtual Hardware ECU How to Significantly Increase Your Testing Throughput! Elektrobit Tech Day Jason Niatas Synopsys Inc. July 27, 2017 2017 Synopsys, Inc. 1 Agenda Automotive electronic evolution and
Operating Systems, Concurrency and Time. real-time communication and CAN. Johan Lukkien
 Operating Systems, Concurrency and Time real-time communication and CAN Johan Lukkien (Courtesy: Damir Isovic, Reinder Bril) Question Which requirements to communication arise from real-time systems? How
Operating Systems, Concurrency and Time real-time communication and CAN Johan Lukkien (Courtesy: Damir Isovic, Reinder Bril) Question Which requirements to communication arise from real-time systems? How
In Vehicle Networking : a Survey and Look Forward
 In Vehicle Networking : a Survey and Look Forward Nicolas Navet Workshop on Specialized Networks, ETFA09, Palma, Spain - 25/09/2009 Complexity Mastered Outline 1. Architecture of Automotive Embedded Systems
In Vehicle Networking : a Survey and Look Forward Nicolas Navet Workshop on Specialized Networks, ETFA09, Palma, Spain - 25/09/2009 Complexity Mastered Outline 1. Architecture of Automotive Embedded Systems
MATLAB Expo Simulation Based Automotive Communication Design using MATLAB- SimEvent. Sudhakaran M Anand H General Motors
 MATLAB Expo 2013 Simulation Based Automotive Communication Design using MATLAB- SimEvent Sudhakaran M Anand H General Motors 1 Agenda Introduction Different Analysis Methods Analytical vs. Simulation Approach
MATLAB Expo 2013 Simulation Based Automotive Communication Design using MATLAB- SimEvent Sudhakaran M Anand H General Motors 1 Agenda Introduction Different Analysis Methods Analytical vs. Simulation Approach
Controller area network
 Controller area network From Wikipedia, the free encyclopedia (Redirected from Controller area network) Controller area network (CAN or CAN-bus) is a vehicle bus standard designed to allow microcontrollers
Controller area network From Wikipedia, the free encyclopedia (Redirected from Controller area network) Controller area network (CAN or CAN-bus) is a vehicle bus standard designed to allow microcontrollers
AUTOSAR proofs to be THE automotive software platform for intelligent mobility
 AUTOSAR proofs to be THE automotive software platform for intelligent mobility Dr.-Ing. Thomas Scharnhorst AUTOSAR Spokesperson Simon Fürst, BMW AG Stefan Rathgeber, Continental Corporation Lorenz Slansky,
AUTOSAR proofs to be THE automotive software platform for intelligent mobility Dr.-Ing. Thomas Scharnhorst AUTOSAR Spokesperson Simon Fürst, BMW AG Stefan Rathgeber, Continental Corporation Lorenz Slansky,
CAN FD with Dynamic Multi-PDU-to-Frame Mapping
 CAN FD with Dynamic Multi-PDU-to-Frame Mapping Flexible Network Architectures V0.1 2015-09-25 E/E Trends and Challenges Why is Dynamic Multi-PDU-to-Frame Mapping required? The Trend: Demand for communication
CAN FD with Dynamic Multi-PDU-to-Frame Mapping Flexible Network Architectures V0.1 2015-09-25 E/E Trends and Challenges Why is Dynamic Multi-PDU-to-Frame Mapping required? The Trend: Demand for communication
Field buses (part 2): time triggered protocols
: time triggered protocols") Field buses (part 2): time triggered protocols Nico Fritz Universität des Saarlandes Embedded Systems 2002/2003 (c) Daniel Kästner. 1 CAN and LIN LIN CAN Type Arbitration Transfer rate Serial communication
Field buses (part 2): time triggered protocols Nico Fritz Universität des Saarlandes Embedded Systems 2002/2003 (c) Daniel Kästner. 1 CAN and LIN LIN CAN Type Arbitration Transfer rate Serial communication
Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007
 Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007 Automotive Networks complex networks hundreds of functions 50+ ECUs (Electronic Control Unit)
Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007 Automotive Networks complex networks hundreds of functions 50+ ECUs (Electronic Control Unit)
Mentor Automotive. Vehicle Network Design to meet the needs of ADAS and Autonomous Driving
 Mentor Automotive Vehicle Network Design to meet the needs of ADAS and Autonomous Driving Presented to AESIN Conference 2016 By Martin Wennberg October 2016 Abstract With the new automotive trends such
Mentor Automotive Vehicle Network Design to meet the needs of ADAS and Autonomous Driving Presented to AESIN Conference 2016 By Martin Wennberg October 2016 Abstract With the new automotive trends such
In March 2007, over 200 developers met in Stuttgart for the. control algorithms that have become increasingly faster are
 FlexRay is Driving Partners demonstrate successful system development at the FlexRay Symposium In March 2007, over 200 developers met in Stuttgart for the FlexRay Symposium sponsored by Vector Informatik.
FlexRay is Driving Partners demonstrate successful system development at the FlexRay Symposium In March 2007, over 200 developers met in Stuttgart for the FlexRay Symposium sponsored by Vector Informatik.
Countermeasures against Cyber-attacks
 Countermeasures against Cyber-attacks Case of the Automotive Industry Agenda Automotive Basics ECU, domains, CAN Automotive Security Motivation, trends Hardware and Software Security EVITA, SHE, HSM Secure
Countermeasures against Cyber-attacks Case of the Automotive Industry Agenda Automotive Basics ECU, domains, CAN Automotive Security Motivation, trends Hardware and Software Security EVITA, SHE, HSM Secure
Syslog Technologies Innovative Thoughts
 CAN Test Analyzer for quality testing in Automobile Production Plant with Authorized Report Generation Introduction Controller Area Network (CAN) is an attractive alternative in the automotive and automation
CAN Test Analyzer for quality testing in Automobile Production Plant with Authorized Report Generation Introduction Controller Area Network (CAN) is an attractive alternative in the automotive and automation
Introduction of CAN FD into the next generation of vehicle E/E architectures
 Introduction of CAN FD into the next generation of vehicle E/E architectures Dr. M. Schreiner, L. Donat, S. Köngeter, Daimler AG Automakers are about to introduce CAN FD into the next generation of vehicle
Introduction of CAN FD into the next generation of vehicle E/E architectures Dr. M. Schreiner, L. Donat, S. Köngeter, Daimler AG Automakers are about to introduce CAN FD into the next generation of vehicle
AUTOSAR stands for AUTomotive Open Systems ARchitecture. Partnership of automotive Car Manufacturers and their Suppliers
 Introduction stands for AUTomotive Open Systems ARchitecture Electronic Control Unit Partnership of automotive Car Manufacturers and their Suppliers Source for ECU: Robert Bosch GmbH 2 Introduction Members
Introduction stands for AUTomotive Open Systems ARchitecture Electronic Control Unit Partnership of automotive Car Manufacturers and their Suppliers Source for ECU: Robert Bosch GmbH 2 Introduction Members
Architectures of Automotive Electrical. Nicolas Navet. Can be freely used for teaching Complexity Mastered. Outline
 Architectures of Automotive Electrical and Electronics (E/E) Systems Nicolas Navet Teaching slides Can be freely used for teaching Complexity Mastered Outline 1. Architecture of Automotive Embedded Systems
Architectures of Automotive Electrical and Electronics (E/E) Systems Nicolas Navet Teaching slides Can be freely used for teaching Complexity Mastered Outline 1. Architecture of Automotive Embedded Systems
PREEvision Technical Article
 PREEvision Technical Article AUTOSAR-Conformant Vehicle Diagnostics over : Developing Diagnostic Communications for E/E Systems The electronically controlled systems of modern vehicles are networked with
PREEvision Technical Article AUTOSAR-Conformant Vehicle Diagnostics over : Developing Diagnostic Communications for E/E Systems The electronically controlled systems of modern vehicles are networked with
Model Based Development of a Light Function for a Rapid Prototyping System. Prof. Dr. Dieter Nazareth
 for a System Prof. Dr. Dieter Nazareth 2012 Prof. Dr. Dieter Nazareth Hochschule Landshut Electronic Control Units Today most functions in a car provided to the driver are electronically supported, i.e.
for a System Prof. Dr. Dieter Nazareth 2012 Prof. Dr. Dieter Nazareth Hochschule Landshut Electronic Control Units Today most functions in a car provided to the driver are electronically supported, i.e.
Additional Slides (informative)
") Automation Systems Discrete Event Control Systems and Networked Automation Systems Additional Slides (informative) Application Automotive Networks (LIN, CAN, FlexRay, MOST) Vorlesungstitel Vehicle Bus
Automation Systems Discrete Event Control Systems and Networked Automation Systems Additional Slides (informative) Application Automotive Networks (LIN, CAN, FlexRay, MOST) Vorlesungstitel Vehicle Bus
INCA-EIP V7.2 User s Guide
 INCA-EIP V7.2 User s Guide Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation to this
INCA-EIP V7.2 User s Guide Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation to this
Time Triggered CAN, Implementations, Development and Testing Tools
 Time Triggered CAN, Implementations, Development and Testing Tools Chris Quigley, Ben Pope, James Finney, Richard T. McLaughlin Warwick Control Technologies ABSTRACT The Controller Area Network (CAN) has
Time Triggered CAN, Implementations, Development and Testing Tools Chris Quigley, Ben Pope, James Finney, Richard T. McLaughlin Warwick Control Technologies ABSTRACT The Controller Area Network (CAN) has
Current status and Future of AUTOSAR. Markus Bechter 7 th AUTOSAR Open Conference Oct. 22 nd -23 rd 2014, Detroit
 Current status and Future of AUTOSAR Markus Bechter 7 th AUTOSAR Open Conference Oct. 22 nd -23 rd 2014, Detroit Overview Achievements AUTOSAR Products Future of AUTOSAR 3 Achievements new concepts in
Current status and Future of AUTOSAR Markus Bechter 7 th AUTOSAR Open Conference Oct. 22 nd -23 rd 2014, Detroit Overview Achievements AUTOSAR Products Future of AUTOSAR 3 Achievements new concepts in
Product Information ES582.1 Compact USB Device
 Product Information 1 Public PGA 2017-01-16 ETAS GmbH 2017. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, Content Compact Line Product Description 2 Public PGA
Product Information 1 Public PGA 2017-01-16 ETAS GmbH 2017. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, Content Compact Line Product Description 2 Public PGA
Tools for CAN based networking. On the street, in the air, in the orbit
 Tools for CAN based networking On the street, in the air, in the orbit Vector Informatik GmbH Vector provides OEMs and suppliers of automotive and related industries a professional and open development
Tools for CAN based networking On the street, in the air, in the orbit Vector Informatik GmbH Vector provides OEMs and suppliers of automotive and related industries a professional and open development
Distributed IMA with TTEthernet
 Distributed IMA with thernet ARINC 653 Integration of thernet Georg Gaderer, Product Manager Georg.Gaderer@tttech.com October 30, 2012 Copyright TTTech Computertechnik AG. All rights reserved. Introduction
Distributed IMA with thernet ARINC 653 Integration of thernet Georg Gaderer, Product Manager Georg.Gaderer@tttech.com October 30, 2012 Copyright TTTech Computertechnik AG. All rights reserved. Introduction
An Encapsulated Communication System for Integrated Architectures
 An Encapsulated Communication System for Integrated Architectures Architectural Support for Temporal Composability Roman Obermaisser Overview Introduction Federated and Integrated Architectures DECOS Architecture
An Encapsulated Communication System for Integrated Architectures Architectural Support for Temporal Composability Roman Obermaisser Overview Introduction Federated and Integrated Architectures DECOS Architecture
Tools and Methods for Validation and Verification as requested by ISO26262
 Tools and for Validation and Verification as requested by ISO26262 Markus Gebhardt, Axel Kaske ETAS GmbH Markus.Gebhardt@etas.com Axel.Kaske@etas.com 1 Abstract The following article will have a look on
Tools and for Validation and Verification as requested by ISO26262 Markus Gebhardt, Axel Kaske ETAS GmbH Markus.Gebhardt@etas.com Axel.Kaske@etas.com 1 Abstract The following article will have a look on
Workshop on In Vehicle Network using CAN By
 Workshop on In Vehicle Network using CAN By Modern CAR Modern CAR INTRODUCTION 1. Controller Area Network (CAN) was initially created by German automotive system supplier Robert Bosch in the mid-1980s.
Workshop on In Vehicle Network using CAN By Modern CAR Modern CAR INTRODUCTION 1. Controller Area Network (CAN) was initially created by German automotive system supplier Robert Bosch in the mid-1980s.
Tutorial for Wake Up Schemes and Requirements for Automotive Communication Networks
 Tutorial for Wake Up Schemes and Requirements for Automotive Communication Networks Presentation supported (alphabetical order) by: Stefan Buntz (Daimler) Thomas Hogenmüller (Robert Bosch) Stephane Korzin
Tutorial for Wake Up Schemes and Requirements for Automotive Communication Networks Presentation supported (alphabetical order) by: Stefan Buntz (Daimler) Thomas Hogenmüller (Robert Bosch) Stephane Korzin
Product Information ES582.1 Compact USB Device
 Product Information ES582.1 Compact USB Device 1 Public PGA 2016-08-15 ETAS GmbH 2016. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, Content Compact Line Product
Product Information ES582.1 Compact USB Device 1 Public PGA 2016-08-15 ETAS GmbH 2016. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, Content Compact Line Product
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Dr. Günther Heling Vector Informatik AUTOSAR Adaptive Platform Now it s Time to get on Board AUTOSAR Nov-2017 Introduction At the first glance Adaptive and Classic don t have
10 th AUTOSAR Open Conference Dr. Günther Heling Vector Informatik AUTOSAR Adaptive Platform Now it s Time to get on Board AUTOSAR Nov-2017 Introduction At the first glance Adaptive and Classic don t have
CAN-FD Flexible Data Rate CAN
 FD CAN-FD Flexible Data Rate CAN A Short Primer and Update V. 202-08-27 Agenda > Why CAN-FD? What is CAN-FD? Basic Concepts CAN-FD Specifics Data Frame Operating Modes/States Physical Layer Considerations
FD CAN-FD Flexible Data Rate CAN A Short Primer and Update V. 202-08-27 Agenda > Why CAN-FD? What is CAN-FD? Basic Concepts CAN-FD Specifics Data Frame Operating Modes/States Physical Layer Considerations
Parallel Computer Technology - A Solution for Automobiles?
 2009 Third International Conference on Advanced Engineering Computing and Applications in Sciences Parallel Computer Technology - A Solution for Automobiles? How car engineers can learn from parallel computing
2009 Third International Conference on Advanced Engineering Computing and Applications in Sciences Parallel Computer Technology - A Solution for Automobiles? How car engineers can learn from parallel computing
FlexRay and Automotive Networking Future
 FlexRay and Automotive Networking Future Chris Quigley Warwick Control Technologies Presentation Overview High Speed and High Integrity Networking Why FlexRay? CAN Problems Time Triggered Network Principles
FlexRay and Automotive Networking Future Chris Quigley Warwick Control Technologies Presentation Overview High Speed and High Integrity Networking Why FlexRay? CAN Problems Time Triggered Network Principles
Till Steinbach 1 Franz Korf 1 René Röllig 2 Thomas Eymann 2.
 How can I get the most out of Automotive Ethernet? System level network simulation for the design and evaluation of upcoming Ethernet-based architectures Till Steinbach 1 Franz Korf 1 René Röllig 2 Thomas
How can I get the most out of Automotive Ethernet? System level network simulation for the design and evaluation of upcoming Ethernet-based architectures Till Steinbach 1 Franz Korf 1 René Röllig 2 Thomas
The Adaptive Platform for Future Use Cases
 The Adaptive Platform for Future Use Cases Vector Congress 2016 - Stuttgart, 2016-11-30 V0.1 2016-09-21 Agenda Introduction Adaptive AUTOSAR Architecture Use Cases and Requirements Adaptive AUTOSAR at
The Adaptive Platform for Future Use Cases Vector Congress 2016 - Stuttgart, 2016-11-30 V0.1 2016-09-21 Agenda Introduction Adaptive AUTOSAR Architecture Use Cases and Requirements Adaptive AUTOSAR at
High Speed Networks per applicazioni mobili, protocolli e funzionalità
 High Speed Networks per applicazioni mobili, protocolli e funzionalità Giorgio Malaguti, Ph.D. E.S.T.E. Technology Automotive Trends 2 Changes in automotive connectivity 3 The connected vehicle of 2020
High Speed Networks per applicazioni mobili, protocolli e funzionalità Giorgio Malaguti, Ph.D. E.S.T.E. Technology Automotive Trends 2 Changes in automotive connectivity 3 The connected vehicle of 2020
AUTOSAR System and Software Design with PREEvision
 PREEvision 9.0 RELEASED V0.0 2018-10-15 Agenda CAN FD Commnication Design 2 OVERVIEW 3 Overview AUTOSAR in PREEvision Software Architectre Commnication Network Topology 4 Overview 5 Overview Mlti ser spport
PREEvision 9.0 RELEASED V0.0 2018-10-15 Agenda CAN FD Commnication Design 2 OVERVIEW 3 Overview AUTOSAR in PREEvision Software Architectre Commnication Network Topology 4 Overview 5 Overview Mlti ser spport
ETHERNET AS AN EMERGING TREND IN VEHICLE NETWORK TECHNOLOGY PART II
 ETHERNET AS AN EMERGING TREND IN VEHICLE NETWORK TECHNOLOGY PART II In the second part of this paper on Ethernet as an emerging trend in vehicle network technology, we look at the challenges and the progress
ETHERNET AS AN EMERGING TREND IN VEHICLE NETWORK TECHNOLOGY PART II In the second part of this paper on Ethernet as an emerging trend in vehicle network technology, we look at the challenges and the progress
An Introduction to FlexRay as an Industrial Network
 An Introduction to FlexRay as an Industrial Network Robert Shaw, Brendan Jackman Automotive Control Group, Waterford Institute of Technology, Waterford, Ireland. E-mail: rshaw@wit.ie, bjackman@wit.ie Website:
An Introduction to FlexRay as an Industrial Network Robert Shaw, Brendan Jackman Automotive Control Group, Waterford Institute of Technology, Waterford, Ireland. E-mail: rshaw@wit.ie, bjackman@wit.ie Website:
INCA-EIP (Experimental Target Integration Package) V7.0.2 User s Guide
 V7.0.2 User s Guide") INCA-EIP (Experimental Target Integration Package) V7.0.2 User s Guide Copyright The information in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH assumes
INCA-EIP (Experimental Target Integration Package) V7.0.2 User s Guide Copyright The information in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH assumes
Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry
 Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry A Time-Triggered Middleware for Safety- Critical Automotive Applications Ayhan Mehmet, Maximilian Rosenblattl, Wilfried
Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry A Time-Triggered Middleware for Safety- Critical Automotive Applications Ayhan Mehmet, Maximilian Rosenblattl, Wilfried
How Microcontrollers help GPUs in Autonomous Drive
 How Microcontrollers help GPUs in Autonomous Drive GTC 2017 Munich, 2017-10-12 Hans Adlkofer, VP Automotive System department Outline 1 Main Safety concepts 2 Sensor Fusion architecture and functionalities
How Microcontrollers help GPUs in Autonomous Drive GTC 2017 Munich, 2017-10-12 Hans Adlkofer, VP Automotive System department Outline 1 Main Safety concepts 2 Sensor Fusion architecture and functionalities
The role of CAN in the age of Ethernet and IOT
 The role of CAN in the age of Ethernet and IOT Christian Schlegel, HMS Industrial Networks CAN technology was developed in the 1980s and became available in 1987, just as other industrial fieldbus systems
The role of CAN in the age of Ethernet and IOT Christian Schlegel, HMS Industrial Networks CAN technology was developed in the 1980s and became available in 1987, just as other industrial fieldbus systems
Techday Mobile Electronics Open, connected, scalable With BODAS into the digital future
 Techday 2017 Mobile Electronics Open, connected, scalable Martin Sykora DC-MH/SPL Technical Sales Manager Mobile Electronics 24.-25. October 2017 1 The Internet of Things 3 examples of how we are getting
Techday 2017 Mobile Electronics Open, connected, scalable Martin Sykora DC-MH/SPL Technical Sales Manager Mobile Electronics 24.-25. October 2017 1 The Internet of Things 3 examples of how we are getting
In-Vehicle Global Synchronization
 In-Vehicle Global ronization In-Vehicle Global ronization IEEE 802.1 Plenary Meeting - Geneva - 2013.07.16 Aboubacar Diarra Robert Bosch GmbH 1 IEEE 802.1 Plenary Meeting - Geneva In-Vehicle Global ronization
In-Vehicle Global ronization In-Vehicle Global ronization IEEE 802.1 Plenary Meeting - Geneva - 2013.07.16 Aboubacar Diarra Robert Bosch GmbH 1 IEEE 802.1 Plenary Meeting - Geneva In-Vehicle Global ronization
Communication (III) Kai Huang
 Kai Huang") Communication (III) Kai Huang Ethernet Turns 40 12/17/2013 Kai.Huang@tum 2 Outline Bus basics Multiple Master Bus Network-on-Chip Examples o SPI o CAN o FlexRay o Ethernet Basic OSI model Real-Time Ethernet
Communication (III) Kai Huang Ethernet Turns 40 12/17/2013 Kai.Huang@tum 2 Outline Bus basics Multiple Master Bus Network-on-Chip Examples o SPI o CAN o FlexRay o Ethernet Basic OSI model Real-Time Ethernet
A specification proposed by JASPAR has been adopted for AUTOSAR.
 Japan Automotive Software Platform and Architecture A specification proposed by JASPAR has been adopted for AUTOSAR. JASPAR General Incorporated Association 1. Introduction An RTE profile specification
Japan Automotive Software Platform and Architecture A specification proposed by JASPAR has been adopted for AUTOSAR. JASPAR General Incorporated Association 1. Introduction An RTE profile specification
Mentor Automotive Save Energy with Embedded Software! Andrew Patterson Presented to CENEX 14 th September 2016
 Mentor Automotive Save Energy with Embedded Software! Andrew Patterson Presented to CENEX 14 th September 2016 andrew_patterson@mentor.com Embedded Software & Electric Vehicles Combustion Engine Electric
Mentor Automotive Save Energy with Embedded Software! Andrew Patterson Presented to CENEX 14 th September 2016 andrew_patterson@mentor.com Embedded Software & Electric Vehicles Combustion Engine Electric
Networking with CAN FD have you also thought about testing?
 Networking with CAN FD have you also thought about testing? Test environment for manufacturer-independent control unit tests Introduction The introduction of new technologies in the automotive industry
Networking with CAN FD have you also thought about testing? Test environment for manufacturer-independent control unit tests Introduction The introduction of new technologies in the automotive industry
Quo Vadis SAE J1939 Standardization
 Quo Vadis SAE J1939 Standardization Due to new application layer requirements, SAE is continuing to develop the J1939 standard, which is primarily used to network powertrains in commercial vehicles. However,
Quo Vadis SAE J1939 Standardization Due to new application layer requirements, SAE is continuing to develop the J1939 standard, which is primarily used to network powertrains in commercial vehicles. However,
INCA-ES5xx V Release Notes
 INCA-ES5xx V7.0.1 Release Notes Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation to
INCA-ES5xx V7.0.1 Release Notes Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation to
Overvoltage protection with PROTEK TVS diodes in automotive electronics
 Ian Doyle Protek / Zoltán Kiss Endrich Bauelemente Vertriebs GmbH Overvoltage protection with PROTEK TVS diodes in automotive electronics A utomotive electronics is maybe the area of the automotive industry,
Ian Doyle Protek / Zoltán Kiss Endrich Bauelemente Vertriebs GmbH Overvoltage protection with PROTEK TVS diodes in automotive electronics A utomotive electronics is maybe the area of the automotive industry,
EtherCAT with MORPHEE 2, D2T s Automation System A fast and reliable communication with the test bed
 EtherCAT with MORPHEE 2, D2T s Automation System A fast and reliable communication with the test bed Ing Jérémie EFFLAME (1) ; Ing Stéphane PELLETIER (2) 1) Product department, 11 rue Denis Papin, 78190
EtherCAT with MORPHEE 2, D2T s Automation System A fast and reliable communication with the test bed Ing Jérémie EFFLAME (1) ; Ing Stéphane PELLETIER (2) 1) Product department, 11 rue Denis Papin, 78190
FlexRay International Workshop. Protocol Overview
 FlexRay International Workshop 4 th March 2003 Detroit Protocol Overview Dr. Christopher Temple - Motorola FlexRay principles Provide a communication infrastructure for future generation highspeed control
FlexRay International Workshop 4 th March 2003 Detroit Protocol Overview Dr. Christopher Temple - Motorola FlexRay principles Provide a communication infrastructure for future generation highspeed control
Model-based Calibration of HD Engines. Benjamin Tilch, Rico Möllmann, Axel Steinmann, Dr. Reza Rezaei GT-SUITE Conference, Frankfurt, October 2014
 Model-based Calibration of HD Engines Benjamin Tilch, Rico Möllmann, Axel Steinmann, Dr. Reza Rezaei GT-SUITE Conference, Frankfurt, October 2014 Model-based Calibration of HD Engines Contents Introduction
Model-based Calibration of HD Engines Benjamin Tilch, Rico Möllmann, Axel Steinmann, Dr. Reza Rezaei GT-SUITE Conference, Frankfurt, October 2014 Model-based Calibration of HD Engines Contents Introduction
Schedule Integration for Time-Triggered Systems
 Schedule Integration for Time-Triggered Systems Outline Motivation Automotive software Automotive architectures Integration Challenge Time-triggered automotive systems Sychronization Schedule Integration
Schedule Integration for Time-Triggered Systems Outline Motivation Automotive software Automotive architectures Integration Challenge Time-triggered automotive systems Sychronization Schedule Integration
Institutionen för datavetenskap Department of Computer and Information Science
 Institutionen för datavetenskap Department of Computer and Information Science Final thesis A SystemC simulator for the dynamic segment of the FlexRay protocol by Venkata Rama Krishna Reddy Podduturi LIU-IDA/LITH-EX-A--/9--SE
Institutionen för datavetenskap Department of Computer and Information Science Final thesis A SystemC simulator for the dynamic segment of the FlexRay protocol by Venkata Rama Krishna Reddy Podduturi LIU-IDA/LITH-EX-A--/9--SE
Communication Networks for the Next-Generation Vehicles
 Communication Networks for the, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 (313) 577-3855, smahmud@eng.wayne.edu January 13, 2005 4 th Annual Winter Workshop U.S.
Communication Networks for the, Ph.D. Electrical and Computer Engg. Dept. Wayne State University Detroit MI 48202 (313) 577-3855, smahmud@eng.wayne.edu January 13, 2005 4 th Annual Winter Workshop U.S.
AUTOSAR Software Design with PREEvision
 AUTOSAR Software Design with PREEvision Webinar 2013-06-05 Slide: 1 AUTOSAR Software Design with PREEvision Agenda Overview AUTOSAR Software and System Design Integrated AUTOSAR Software Design Vector
AUTOSAR Software Design with PREEvision Webinar 2013-06-05 Slide: 1 AUTOSAR Software Design with PREEvision Agenda Overview AUTOSAR Software and System Design Integrated AUTOSAR Software Design Vector
Fault tolerant TTCAN networks
 Fault tolerant TTCAN networks B. MŸller, T. FŸhrer, F. Hartwich, R. Hugel, H. Weiler, Robert Bosch GmbH TTCAN is a time triggered layer using the CAN protocol to communicate in a time triggered fashion.
Fault tolerant TTCAN networks B. MŸller, T. FŸhrer, F. Hartwich, R. Hugel, H. Weiler, Robert Bosch GmbH TTCAN is a time triggered layer using the CAN protocol to communicate in a time triggered fashion.
RazorMotion - The next level of development and evaluation is here. Highly automated driving platform for development and evaluation
 RazorMotion - The next level of development and evaluation is here Highly automated driving platform for development and evaluation RazorMotion Highly automated driving platform for development and evaluation
RazorMotion - The next level of development and evaluation is here Highly automated driving platform for development and evaluation RazorMotion Highly automated driving platform for development and evaluation
CAN FD. An Introduction V
 CAN FD An Introdction V.02 208-0- Agenda Why CAN FD? What is CAN FD? CAN FD Use Cases Atomotive Application Domains CAN FD Controller CAN FD Performance CAN FD Devices CAN FD Standardization Smmary References
CAN FD An Introdction V.02 208-0- Agenda Why CAN FD? What is CAN FD? CAN FD Use Cases Atomotive Application Domains CAN FD Controller CAN FD Performance CAN FD Devices CAN FD Standardization Smmary References
Deterministic Ethernet & Unified Networking
 Deterministic Ethernet & Unified Networking Never bet against Ethernet Mirko Jakovljevic mirko.jakovljevic@tttech.com www.tttech.com Copyright TTTech Computertechnik AG. All rights reserved. About TTTech
Deterministic Ethernet & Unified Networking Never bet against Ethernet Mirko Jakovljevic mirko.jakovljevic@tttech.com www.tttech.com Copyright TTTech Computertechnik AG. All rights reserved. About TTTech
INCA-ES9xx V7.0.2 Release Notes
 INCA-ES9xx V7.0.2 Release Notes Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation to
INCA-ES9xx V7.0.2 Release Notes Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation to
Improving the Reliability and Performance of FlexRay Vehicle Network Applications Using Simulation Techniques
 Waterford Institute of Technology Institiúid Teicneolaíochta Phort Láirge Improving the Reliability and Performance of FlexRay Vehicle Network Applications Using Simulation Techniques Robert Shaw B.Sc.
Waterford Institute of Technology Institiúid Teicneolaíochta Phort Láirge Improving the Reliability and Performance of FlexRay Vehicle Network Applications Using Simulation Techniques Robert Shaw B.Sc.
Chances and challenges
 Chances and challenges CAN FD for commercial vehicles Holger Zeltwanger Commercial vehicles CAN in mobile machinery Truck network architecture Trunk, fuel Switches CAN (FD) Instrumentation train (125 or
Chances and challenges CAN FD for commercial vehicles Holger Zeltwanger Commercial vehicles CAN in mobile machinery Truck network architecture Trunk, fuel Switches CAN (FD) Instrumentation train (125 or
Freescale, the Freescale logo, AltiVec, C-5, CodeTEST, CodeWarrior, ColdFire, ColdFire+, C-Ware, the Energy Efficient Solutions logo, Kinetis,
 Dr. Stephen Rober Freescale, the Freescale logo, AltiVec, C-5, CodeTEST, CodeWarrior, ColdFire, C-Ware, t he Energy Efficient Solutions logo, mobilegt, PowerQUICC, QorIQ, StarCore and Symphony are trademarks
Dr. Stephen Rober Freescale, the Freescale logo, AltiVec, C-5, CodeTEST, CodeWarrior, ColdFire, C-Ware, t he Energy Efficient Solutions logo, mobilegt, PowerQUICC, QorIQ, StarCore and Symphony are trademarks
VT System Smart HIL Testing
 VT System Smart HIL Testing V1.0 2010-06-04 Agenda > ECU Testing Testing a Door Control Unit Summary and Outlook Slide: 2 ECU Testing I/O Access for ECU Testing ECU has to be tested in its natural environment
VT System Smart HIL Testing V1.0 2010-06-04 Agenda > ECU Testing Testing a Door Control Unit Summary and Outlook Slide: 2 ECU Testing I/O Access for ECU Testing ECU has to be tested in its natural environment
The Power to Log. Powerful Solution for Vehicle Testing and Validation of Automobile Networks
 The Power to Log Powerful Solution for Vehicle Testing and Validation of Automobile Networks Accessory Modular Hardware and Software Upgrade Options Next Generation Data Logging: The Power Family Autonomous
The Power to Log Powerful Solution for Vehicle Testing and Validation of Automobile Networks Accessory Modular Hardware and Software Upgrade Options Next Generation Data Logging: The Power Family Autonomous
Tomorrow s In-Car Interconnect? A Competitive Evaluation of IEEE AVB and Time-Triggered Ethernet (AS6802) NET
 NET") A Competitive Evaluation of IEEE 802.1 AVB and Time-Triggered Ethernet (AS6802) Till Steinbach 1 Hyung-Taek Lim 2 Franz Korf 1 Thomas C. Schmidt 1 Daniel Herrscher 2 Adam Wolisz 3 1 {till.steinbach, korf,
A Competitive Evaluation of IEEE 802.1 AVB and Time-Triggered Ethernet (AS6802) Till Steinbach 1 Hyung-Taek Lim 2 Franz Korf 1 Thomas C. Schmidt 1 Daniel Herrscher 2 Adam Wolisz 3 1 {till.steinbach, korf,
Ethernet Design Challenges The requirements and use of Ethernet with AUTOSAR
 Ethernet Design Challenges The requirements and use of Ethernet with AUTOSAR Anders Kallerdahl Product Manager AUTOSAR tools mentor.com/automotive Android is a trademark of Google Inc. Use of this trademark
Ethernet Design Challenges The requirements and use of Ethernet with AUTOSAR Anders Kallerdahl Product Manager AUTOSAR tools mentor.com/automotive Android is a trademark of Google Inc. Use of this trademark
Software Architecture. Definition of Software Architecture. The importance of software architecture. Contents of a good architectural model
 Software Architecture Definition of Software Architecture Software architecture is process of designing g the global organization of a software system, including: Dividing software into subsystems. Deciding
Software Architecture Definition of Software Architecture Software architecture is process of designing g the global organization of a software system, including: Dividing software into subsystems. Deciding
Resistance Is Futile Electronics Are on the Rise Electronic Control Units and Communication Protocols
 Electronic Control Units and Communication Protocols April 2009 PREPARED BY: IHS Global Insight, Inc. Electronics content in cars has been steadily increasing since as far back as the early 1970s, starting
Electronic Control Units and Communication Protocols April 2009 PREPARED BY: IHS Global Insight, Inc. Electronics content in cars has been steadily increasing since as far back as the early 1970s, starting
Scalable and Flexible Software Platforms for High-Performance ECUs. Christoph Dietachmayr Sr. Engineering Manager, Elektrobit November 8, 2018
 Scalable and Flexible Software Platforms for High-Performance ECUs Christoph Dietachmayr Sr. Engineering Manager, November 8, Agenda A New E/E Architectures and High-Performance ECUs B Non-Functional Aspects:
Scalable and Flexible Software Platforms for High-Performance ECUs Christoph Dietachmayr Sr. Engineering Manager, November 8, Agenda A New E/E Architectures and High-Performance ECUs B Non-Functional Aspects:
AUTOMOBILE APPLICATIONS USING CAN PROTOCOL
 AUTOMOBILE APPLICATIONS USING CAN PROTOCOL 1 VEERESH B M, 2 JEEVAN C N, 3 MAHESH PATIL 1,2,3 Department of Electronics and Communication, G.S.S.I.T, Bangalore, India Abstract- The main objective of the
AUTOMOBILE APPLICATIONS USING CAN PROTOCOL 1 VEERESH B M, 2 JEEVAN C N, 3 MAHESH PATIL 1,2,3 Department of Electronics and Communication, G.S.S.I.T, Bangalore, India Abstract- The main objective of the
NET. A Hardware/Software Co-Design Approach for Ethernet Controllers to Support Time-triggered Trac in the Upcoming IEEE TSN Standards
 NET A Hardware/Software Co-Design Approach for Ethernet Controllers to Support Time-triggered Trac in the Upcoming IEEE TSN Standards Friedrich Groÿ Till Steinbach Franz Korf Thomas C. Schmidt Bernd Schwarz
NET A Hardware/Software Co-Design Approach for Ethernet Controllers to Support Time-triggered Trac in the Upcoming IEEE TSN Standards Friedrich Groÿ Till Steinbach Franz Korf Thomas C. Schmidt Bernd Schwarz
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Dr. Moritz Neukirchner Elektrobit Automotive GmbH Building Performance ECUs with Adaptive AUTOSAR AUTOSAR Nov-2017 Major market trends and their impact Trends Impact on E/E
10 th AUTOSAR Open Conference Dr. Moritz Neukirchner Elektrobit Automotive GmbH Building Performance ECUs with Adaptive AUTOSAR AUTOSAR Nov-2017 Major market trends and their impact Trends Impact on E/E
Cyber security mechanisms for connected vehicles
 Infineon Security Partner Network Partner Use Case Cyber security mechanisms for connected vehicles Protecting automotive vehicle networks and business models from cyber security attacks Products AURIX
Infineon Security Partner Network Partner Use Case Cyber security mechanisms for connected vehicles Protecting automotive vehicle networks and business models from cyber security attacks Products AURIX
November 16, TTTech Computertechnik AG / TTTech Auto AG Copyright TTTech Auto AG. All rights reserved
 Future Mobility Approaches and Required Developments for On-board Networks and ADAS Computers Andreas ECKEL, Teamlead Grants Jan RADKE, Cooperation Manager TTTech Computertechnik AG / TTTech Auto AG November
Future Mobility Approaches and Required Developments for On-board Networks and ADAS Computers Andreas ECKEL, Teamlead Grants Jan RADKE, Cooperation Manager TTTech Computertechnik AG / TTTech Auto AG November
Reaching for the sky with certified and safe solutions for the aerospace market
 www.tttech.com/aerospace Reaching for the sky with certified and safe solutions for the aerospace market More about our certified and safe products inside Advancing safe technologies, improving human lives
www.tttech.com/aerospace Reaching for the sky with certified and safe solutions for the aerospace market More about our certified and safe products inside Advancing safe technologies, improving human lives
A Design of Fail-safe Gateway-embedded System for In-vehicle Networks
 A Design of Fail-safe Gateway-embedded System for In-vehicle Networks Sukhyun Seo, Junsu Kim, *Su Min Kim Department of Electronics Engineering, Korea Polytechnic University, 15073 Siheung, Republic of
A Design of Fail-safe Gateway-embedded System for In-vehicle Networks Sukhyun Seo, Junsu Kim, *Su Min Kim Department of Electronics Engineering, Korea Polytechnic University, 15073 Siheung, Republic of
Lecture 2. Basics of networking in automotive systems: Network. topologies, communication principles and standardised protocols
 Lecture 2. Basics of networking in automotive systems: Network topologies, communication principles and standardised protocols Objectives Introduce basic concepts used in building networks for automotive
Lecture 2. Basics of networking in automotive systems: Network topologies, communication principles and standardised protocols Objectives Introduce basic concepts used in building networks for automotive
Adaptive AUTOSAR Extending the Scope of AUTOSAR-based Embedded Software
 Adaptive AUTOSAR Extending the Scope of AUTOSAR-based Embedded Software Vector Congress 2017, September 6 th 7 th, Shanghai China V0.1 2017-08-04 Introduction Use Cases for Adaptive AUTOSAR Infotainment
Adaptive AUTOSAR Extending the Scope of AUTOSAR-based Embedded Software Vector Congress 2017, September 6 th 7 th, Shanghai China V0.1 2017-08-04 Introduction Use Cases for Adaptive AUTOSAR Infotainment
High-Speed Reprogramming and Calibration with CAN FD: A Case Study
 High-Speed Reprogramming and Calibration with CAN FD: A Case Study Armin Happel, Erik Sparrer, Oliver Kitt, Oliver Garnatz, Peter Decker Reprogramming of ECUs as well as their in-vehicle calibration are
High-Speed Reprogramming and Calibration with CAN FD: A Case Study Armin Happel, Erik Sparrer, Oliver Kitt, Oliver Garnatz, Peter Decker Reprogramming of ECUs as well as their in-vehicle calibration are
Timing in the TTCAN Network
 Timing in the Network Florian Hartwich, Bernd Müller, Thomas Führer, Robert Hugel, Robert Bosch GmbH ISO TC22/SC3/WG1/TF6 has standardised (as ISO CD 11898-4) an additional layer to the CAN protocol, Time
Timing in the Network Florian Hartwich, Bernd Müller, Thomas Führer, Robert Hugel, Robert Bosch GmbH ISO TC22/SC3/WG1/TF6 has standardised (as ISO CD 11898-4) an additional layer to the CAN protocol, Time
ISO INTERNATIONAL STANDARD. Road vehicles FlexRay communications system Part 4: Electrical physical layer specification
 INTERNATIONAL STANDARD ISO 17458-4 First edition 2013-02-01 Road vehicles FlexRay communications system Part 4: Electrical physical layer specification Véhicules routiers Système de communications FlexRay
INTERNATIONAL STANDARD ISO 17458-4 First edition 2013-02-01 Road vehicles FlexRay communications system Part 4: Electrical physical layer specification Véhicules routiers Système de communications FlexRay
LABCAR-OPERATOR V5.4.2 Getting Started
 LABCAR-OPERATOR V5.4.2 Getting Started Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation
LABCAR-OPERATOR V5.4.2 Getting Started Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation
rcube2: Advanced Rapid Prototyping Electronic Control Unit
 Page 1 rcube2: Advanced Rapid Prototyping Electronic Control Unit Overview rcube2 is a rapid prototyping ECU based on AUTOSAR that enables fast and efficient development of control systems from initial
Page 1 rcube2: Advanced Rapid Prototyping Electronic Control Unit Overview rcube2 is a rapid prototyping ECU based on AUTOSAR that enables fast and efficient development of control systems from initial
Module Test in System Context
 Module Test in System Context Tjark Kiefer, Ingo Matheis Abstract Module tests are well proven methods to assure software quality. But with raising complexity of the code this method is not without its
Module Test in System Context Tjark Kiefer, Ingo Matheis Abstract Module tests are well proven methods to assure software quality. But with raising complexity of the code this method is not without its
Holger Zeltwanger CAN CAN. protocol and its impacts on CANopen. CiA
 Holger Zeltwanger CAN FD protocol and its impacts on CANopen CAN with flexible data-rate In-bit-time detection Free transmission In-bit-time detection Arbitration phase Data transmission phase ACK phase
Holger Zeltwanger CAN FD protocol and its impacts on CANopen CAN with flexible data-rate In-bit-time detection Free transmission In-bit-time detection Arbitration phase Data transmission phase ACK phase
First GENESYS Architectures Implemented in the INDEXYS Project
 Project n 100021 First GENESYS Architectures Implemented in the INDEXYS Project An Overview on the Technical Project Contents and Status Quo Andreas Eckel, TTTech Computertechnik AG CROSS FUNDING-PROVIDER
Project n 100021 First GENESYS Architectures Implemented in the INDEXYS Project An Overview on the Technical Project Contents and Status Quo Andreas Eckel, TTTech Computertechnik AG CROSS FUNDING-PROVIDER
Developing deterministic networking technology for railway applications using TTEthernet software-based end systems
 Developing deterministic networking technology for railway applications using TTEthernet software-based end systems Project n 100021 Astrit Ademaj, TTTech Computertechnik AG Outline GENESYS requirements
Developing deterministic networking technology for railway applications using TTEthernet software-based end systems Project n 100021 Astrit Ademaj, TTTech Computertechnik AG Outline GENESYS requirements
CAN FD - Flexible Tools for Flexible Data Rates
 CAN FD - Flexible Tools for Flexible Data Rates Peter Decker Vector Informatik GmbH V 0.01 2012-06-20 Simulation & Test Environment for Automotive Networks Database Test Spec. ECU Simulation & Test Tool
CAN FD - Flexible Tools for Flexible Data Rates Peter Decker Vector Informatik GmbH V 0.01 2012-06-20 Simulation & Test Environment for Automotive Networks Database Test Spec. ECU Simulation & Test Tool
AVB in Automotive Infotainment Networks
 AVB in Automotive Infotainment Networks Günter Dannhäuser, Daimler AG Andrew Lucas, XMOS Ltd. 2014 IEEE-SA ETHERNET & IP @ AUTOMOTIVE TECHNOLOGY DAY COBO Center, Detroit, Michigan, USA 23 24 October 2014
AVB in Automotive Infotainment Networks Günter Dannhäuser, Daimler AG Andrew Lucas, XMOS Ltd. 2014 IEEE-SA ETHERNET & IP @ AUTOMOTIVE TECHNOLOGY DAY COBO Center, Detroit, Michigan, USA 23 24 October 2014
Safety and Security for Automotive using Microkernel Technology
 Informationstag "Das Automobil als IT-Sicherheitsfall" Berlin, 11.05.2012 Safety and Security for Automotive using Microkernel Technology Dr.-Ing. Matthias Gerlach OpenSynergy TwoBirds withonestone Safety
Informationstag "Das Automobil als IT-Sicherheitsfall" Berlin, 11.05.2012 Safety and Security for Automotive using Microkernel Technology Dr.-Ing. Matthias Gerlach OpenSynergy TwoBirds withonestone Safety