The Safe State: Design Patterns and Degradation Mechanisms for Fail- Operational Systems
|
|
|
- Edith Ward
- 6 years ago
- Views:
Transcription



1 The Safe State: Design Patterns and Degradation Mechanisms for Fail- Operational Systems Alexander Much

2 Agenda About EB Automotive Motivation Comparison of different architectures Concept for an 1oo2D software systems Summary 2



3 The Safe State: Design Patterns and Mechanisms for Fail-Operational Systems EB: Software and Services
4 Agenda About EB Automotive Motivation Comparison of different architectures Concept for an 1oo2D software systems Summary 4

5 Different Types of Systems According to Laprie (1992) Hazard Accident Failure Error Fail-safe Systems Fault Fault-tolerant Systems Perfect Systems Error-tolerant Systems Dependable Systems Fail-Operational Systems Safe Systems 5

6 Current Automotive Systems are Fail-Safe Failure Detected? Deactivate / degrade function Safe State Inform the driver Report a diagnostic error Standard approach in many safety relevant systems: Airbag, ESP, air conditioning, battery charging, Driver assistant functions such as adaptive cruise control, lane assist, Some functions provide a degraded mode, sometimes limited in time: Electronic Power Steering Braking 6
 examples FCW, LDW ACC, LKA Traffic Jam Assistant Highway Chauffeur Valet Parking Robot car FCW Forward Collosion Warning LDW Lane")
7 Levels of Autonomous Driving (AD) degree of automation Driver Automation driver in the loop yes (required) not required time to take control back - ~ 1s several seconds couple of minutes other activities while driving not allowed specific all (even sleeping) examples FCW, LDW ACC, LKA Traffic Jam Assistant Highway Chauffeur Valet Parking Robot car FCW Forward Collosion Warning LDW Lane Departure Warning ACC Adaptive Cruise Control LKA Lane Keeping Assistant Source: SAE, NHTSA, VDA 7
8 Goal: Autonomous driving Driver only Assisted Partial autom. Conditional autom. High autom. Full autom. Fail safe Fail operational Safe State could mean: Continue driving until driver is in the loop approx. 7-15s for conditional autonomous driving Several minutes for high and full autonomous driving Precondition: driver monitoring including a black-box Perform an autonomous safe-stop (stand-still at a non-hazardous place) Main issue is to get the driver attention focused on the situation Several minutes, depending on the situation Precondition: legal acceptance, approved and certified black-box 8
9 Agenda About EB Automotive Motivation Comparison of different architectures Concept for an 1oo2D software systems Summary 9
10 2 channels with comparison ECU 1 Input Data = ECU 2 Output Data Redundant ECUs calculate using redundant data, output is compared. A 2 channels with comparison system is fail-safe since you cannot distinguish between ECU1 not ok and ECU2 not ok. The safe state is a complete system shutdown. 10
11 2oo3 Systems ECU 1 Input Data ECU 2 V O T E R Output Data ECU 3 Three redundant ECUs calculate on redundant data, output data is voted upon If one of the ECUs fails the system can continue with the remaining two ECUs. Failures in the input data can be detected by an Input-Voter. 11
.")
12 2oo3 Systems and the Automotive Domain Applicable for automotive? More ECUs More wiring More weight More power consumption Higher complexity to manage Will we as a customer accept that? Different opinions and market studies Referring to several studies, customer will pay more for autonomous driving car (mid-size car). Source: KPMG(2013), autelligence (2015) 12
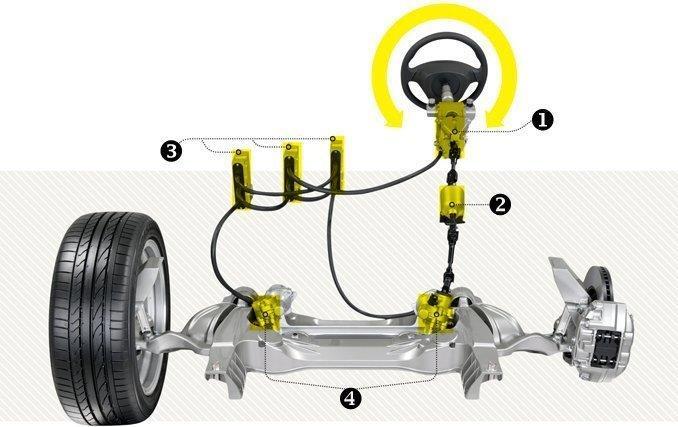
13 2oo3: An Example (Nissan Steer-by-Wire) Source: 13
14 Agenda About EB Automotive Motivation Comparison of different architectures Concept for an 1oo2D software systems Summary 14
15 1oo2D Systems Input Logic ECU 1 Output Input Data Diagnostics Diagnostics Input ECU 2 Logic Output Enable Output Enable Output Output Data If an ECU fails in one of the two channels, the system does not shut down but continues to operate with only one channel The best policy is not to operate on a single channel for a long period of time. Controlling this time and matching it with complete system behavior is the key. Precondition: very high diagnostic coverage needed for each ECU to detect failures. 15
16 Microkernel QM Functions The Safe State: Design Patterns and Mechanisms for Fail-Operational Systems From Detection to Prevention Integrity mechanisms: Memory partitioning Data protection Temporal protection Software Engineering: Plausibility checks Functional monitoring Defensive programming Semantic analysis Robustness Car Infrastructure: Fault tolerant Ethernet Service orientated communication Memory Partitions Safety OS AUTOSAR OS BSW Safety OS Data Protection Stack Protection Context Protection OS Protection Hardware Error management QM SW-Cs OEM modules MCAL Safety RTE Safety E2E Protection Safe communication ASIL SW-C ASIL CDD MCAL (ASIL) QM CDD Safety E2E Protection Safety TimE Protection Wdg Safety TimE Protection Alive supervision Deadline Monitoring Control flow monitoring 16
17 Dynamic 1oo2D 1oo2D Normal operation 1oo2D* 1 channel Still Operational Handover to driver Failure recovery Internal recovery Rebuilding 2 channel system Disabling of comfort functions < 10s 17
18 1oo2D - Normal operation 1oo2D system ECU1 Func2 Func1 Func3 Diagnostics ECU2 Func2 Func1 Func3 Diagnostics Fault tolerant Ethernet ECU3 Func5 Func3 Func4 Func1 Func6 Sensors /Actuators critical noncritical disabled
19 1002D 1 channel 1oo2D system ECU1 Func2 Func1 Func3 Diagnostics ECU2 Func2 Func1 Func3 Diagnostics Fault tolerant Ethernet ECU3 Func5 Func3 Func4 Func1 Func6 Sensors /Actuators critical noncritical disabled

20 1002D* 1oo2D system ECU1 Func2 Func1 Func3 Diagnostics ECU2 Func2 Func1 Func3 Diagnostics Fault tolerant Ethernet ECU3 Func5 Func3 Func4 Func1 Func6 Requirements for Reconfiguration Sensors /Actuators Req. 1: Functions can be dynamically relocated Req. 2: Sensor/Actuators are redundant or accessible via network critical noncritical disabled

 supporting reconfigurable software")


21 Dynamic Re-Configuration Req. 1: Functions can be dynamically relocated Application information based on AUTOSAR xml description available Runtime environment (RTE) supporting reconfigurable software components OS_App1 Data Task1 Data Stack OS Data Task2 Data Stack OS_App2 Data Task3 Data Stack ISR1 Data Stack Stack Threads can restarted with e.g. Safety OS Req. 2: Sensor/Actuators are redundant or accessible via network Service orientated communication Multi-cast fault-tolerant Ethernet 21
22 Agenda About EB Automotive Motivation Comparison of different architectures Concept for an 1oo2D software systems Summary 22

23 Summary Re-use of available integrity mechanisms from fail-safe systems is the basis for building failoperational systems. Software systems that are designed to achieve a high diagnostic coverage are available today and can be extended to fail-operational. Fault tolerant Automotive Ethernet is available today. Established concepts for fail-operational system are available and can be reused in automotive systems with budget constraints. Let s build the next generation software systems for autonomous driving! 23


24 Contact us!
Autonomous Driving From Fail-Safe to Fail-Operational Systems
 Autonomous Driving From Fail-Safe to Fail-Operational Systems Rudolf Grave December 3, 2015 Agenda About EB Automotive Autonomous Driving Requirements for a future car infrastructure Concepts for fail-operational
Autonomous Driving From Fail-Safe to Fail-Operational Systems Rudolf Grave December 3, 2015 Agenda About EB Automotive Autonomous Driving Requirements for a future car infrastructure Concepts for fail-operational
Software integration challenge multi-core experience from real world projects
 Software integration challenge multi-core experience from real world projects Rudolf Grave 17.06.2015 Agenda About EB Automotive Motivation Constraints for mapping functions to cores AUTOSAR & MultiCore
Software integration challenge multi-core experience from real world projects Rudolf Grave 17.06.2015 Agenda About EB Automotive Motivation Constraints for mapping functions to cores AUTOSAR & MultiCore
Software Architecture for Secure ECUs. Rudolf Grave EB TechDay-June 2015
 Software Architecture for Secure ECUs Rudolf Grave EB TechDay-June 2015 Agenda No safety without security and vice versa Established Safety Concepts Safety Analysis Methods for Security Analysis Secure
Software Architecture for Secure ECUs Rudolf Grave EB TechDay-June 2015 Agenda No safety without security and vice versa Established Safety Concepts Safety Analysis Methods for Security Analysis Secure
ISO meets AUTOSAR - First Lessons Learned Dr. Günther Heling
 ISO 26262 meets AUTOSAR - First Lessons Learned Dr. Günther Heling Agenda 1. ISO 26262 and AUTOSAR Two Basic Contradictions Top-Down vs. Reuse Concentration vs. Distribution 2. Approach Mixed ASIL System
ISO 26262 meets AUTOSAR - First Lessons Learned Dr. Günther Heling Agenda 1. ISO 26262 and AUTOSAR Two Basic Contradictions Top-Down vs. Reuse Concentration vs. Distribution 2. Approach Mixed ASIL System
Functional Safety Architectural Challenges for Autonomous Drive
 Functional Safety Architectural Challenges for Autonomous Drive Ritesh Tyagi: August 2018 Topics Market Forces Functional Safety Overview Deeper Look Fail-Safe vs Fail-Operational Architectural Considerations
Functional Safety Architectural Challenges for Autonomous Drive Ritesh Tyagi: August 2018 Topics Market Forces Functional Safety Overview Deeper Look Fail-Safe vs Fail-Operational Architectural Considerations
Scalable and Flexible Software Platforms for High-Performance ECUs. Christoph Dietachmayr Sr. Engineering Manager, Elektrobit November 8, 2018
 Scalable and Flexible Software Platforms for High-Performance ECUs Christoph Dietachmayr Sr. Engineering Manager, November 8, Agenda A New E/E Architectures and High-Performance ECUs B Non-Functional Aspects:
Scalable and Flexible Software Platforms for High-Performance ECUs Christoph Dietachmayr Sr. Engineering Manager, November 8, Agenda A New E/E Architectures and High-Performance ECUs B Non-Functional Aspects:
Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry
 Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry A Time-Triggered Middleware for Safety- Critical Automotive Applications Ayhan Mehmet, Maximilian Rosenblattl, Wilfried
Taking the Right Turn with Safe and Modular Solutions for the Automotive Industry A Time-Triggered Middleware for Safety- Critical Automotive Applications Ayhan Mehmet, Maximilian Rosenblattl, Wilfried
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Dr. Moritz Neukirchner Elektrobit Automotive GmbH Building Performance ECUs with Adaptive AUTOSAR AUTOSAR Nov-2017 Major market trends and their impact Trends Impact on E/E
10 th AUTOSAR Open Conference Dr. Moritz Neukirchner Elektrobit Automotive GmbH Building Performance ECUs with Adaptive AUTOSAR AUTOSAR Nov-2017 Major market trends and their impact Trends Impact on E/E
Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018
 Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018 Agenda Motivation Introduction of Safety Components Introduction to ARMv8
Communication Patterns in Safety Critical Systems for ADAS & Autonomous Vehicles Thorsten Wilmer Tech AD Berlin, 5. March 2018 Agenda Motivation Introduction of Safety Components Introduction to ARMv8
Automated Driving Necessary Infrastructure Shift
 DEVELOPMENT DRIVER ASSISTANCE SYSTEMS Automated Driving Necessary Infrastructure Shift The current driver assistance functions such as automated parking or traffic jam assistants and lane departure warning
DEVELOPMENT DRIVER ASSISTANCE SYSTEMS Automated Driving Necessary Infrastructure Shift The current driver assistance functions such as automated parking or traffic jam assistants and lane departure warning
Introduction to Adaptive AUTOSAR. Dheeraj Sharma July 27, 2017
 Introduction to Adaptive AUTOSAR Dheeraj Sharma July 27, 2017 Overview Software Platform and scope of Adaptive AUTOSAR Adaptive AUTOSAR architecture and roadmap EB Adaptive Platform and Prototyping solution
Introduction to Adaptive AUTOSAR Dheeraj Sharma July 27, 2017 Overview Software Platform and scope of Adaptive AUTOSAR Adaptive AUTOSAR architecture and roadmap EB Adaptive Platform and Prototyping solution
Failure Diagnosis and Prognosis for Automotive Systems. Tom Fuhrman General Motors R&D IFIP Workshop June 25-27, 2010
 Failure Diagnosis and Prognosis for Automotive Systems Tom Fuhrman General Motors R&D IFIP Workshop June 25-27, 2010 Automotive Challenges and Goals Driver Challenges Goals Energy Rising cost of petroleum
Failure Diagnosis and Prognosis for Automotive Systems Tom Fuhrman General Motors R&D IFIP Workshop June 25-27, 2010 Automotive Challenges and Goals Driver Challenges Goals Energy Rising cost of petroleum
Agenda. > AUTOSAR Overview. AUTOSAR Solution. AUTOSAR on the way
 AUTOSAR Overview Agenda > AUTOSAR Overview AUTOSAR Solution AUTOSAR on the way Slide: 2 Overview and Objectives AUTOSAR Partnership Slide: 3 Development of Functionality Electronic fuel injection Cruise
AUTOSAR Overview Agenda > AUTOSAR Overview AUTOSAR Solution AUTOSAR on the way Slide: 2 Overview and Objectives AUTOSAR Partnership Slide: 3 Development of Functionality Electronic fuel injection Cruise
Is This What the Future Will Look Like?
 Is This What the Future Will Look Like? Implementing fault tolerant system architectures with AUTOSAR basic software Highly automated driving adds new requirements to existing safety concepts. It is no
Is This What the Future Will Look Like? Implementing fault tolerant system architectures with AUTOSAR basic software Highly automated driving adds new requirements to existing safety concepts. It is no
IMPROVING ADAS VALIDATION WITH MBT
 Sophia Antipolis, French Riviera 20-22 October 2015 IMPROVING ADAS VALIDATION WITH MBT Presented by Laurent RAFFAELLI ALL4TEC laurent.raffaelli@all4tec.net AGENDA What is an ADAS? ADAS Validation Implementation
Sophia Antipolis, French Riviera 20-22 October 2015 IMPROVING ADAS VALIDATION WITH MBT Presented by Laurent RAFFAELLI ALL4TEC laurent.raffaelli@all4tec.net AGENDA What is an ADAS? ADAS Validation Implementation
Arccore AB 2017, all rights reserved. Accelerating innovation
 2017-03-02 Arccore AB 2017, all rights reserved Accelerating innovation ARCCORE in brief Independent vendor of automotive-sw with focus on AUTOSAR Integration, adaptation and service Incorporated 2009
2017-03-02 Arccore AB 2017, all rights reserved Accelerating innovation ARCCORE in brief Independent vendor of automotive-sw with focus on AUTOSAR Integration, adaptation and service Incorporated 2009
A specification proposed by JASPAR has been adopted for AUTOSAR.
 Japan Automotive Software Platform and Architecture A specification proposed by JASPAR has been adopted for AUTOSAR. JASPAR General Incorporated Association 1. Introduction An RTE profile specification
Japan Automotive Software Platform and Architecture A specification proposed by JASPAR has been adopted for AUTOSAR. JASPAR General Incorporated Association 1. Introduction An RTE profile specification
Adaptive AUTOSAR: Infrastructure Software for Advanced Driver Assistance. Chris Thibeault June 7, 2016
 Adaptive : Infrastructure Software for Advanced Driver Assistance Chris Thibeault June 7, 2016 Agenda for Adaptive Platform Introduction Goals for the presentation What is the Adaptive Platform? Why do
Adaptive : Infrastructure Software for Advanced Driver Assistance Chris Thibeault June 7, 2016 Agenda for Adaptive Platform Introduction Goals for the presentation What is the Adaptive Platform? Why do
Designing a software framework for automated driving. Dr.-Ing. Sebastian Ohl, 2017 October 12 th
 Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
AUTOBEST: A microkernel-based system (not only) for automotive applications. Marc Bommert, Alexander Züpke, Robert Kaiser.
 for automotive applications. Marc Bommert, Alexander Züpke, Robert Kaiser.") AUTOBEST: A microkernel-based system (not only) for automotive applications Marc Bommert, Alexander Züpke, Robert Kaiser vorname.name@hs-rm.de Outline Motivation AUTOSAR ARINC 653 AUTOBEST Architecture
AUTOBEST: A microkernel-based system (not only) for automotive applications Marc Bommert, Alexander Züpke, Robert Kaiser vorname.name@hs-rm.de Outline Motivation AUTOSAR ARINC 653 AUTOBEST Architecture
Model Based Development and Code Generation for Automotive Embedded Systems. April 26, 2017 Dr. Gergely Pintér, Dr. Máté Kovács thyssenkrupp Steering
 Model Based Development and Code Generation for Automotive Embedded Systems April 26, 2017 Dr. Gergely Pintér, Dr. Máté Kovács Agenda Model Based Development and Code Generation for Automotive Embedded
Model Based Development and Code Generation for Automotive Embedded Systems April 26, 2017 Dr. Gergely Pintér, Dr. Máté Kovács Agenda Model Based Development and Code Generation for Automotive Embedded
Current status and Future of AUTOSAR. Markus Bechter 7 th AUTOSAR Open Conference Oct. 22 nd -23 rd 2014, Detroit
 Current status and Future of AUTOSAR Markus Bechter 7 th AUTOSAR Open Conference Oct. 22 nd -23 rd 2014, Detroit Overview Achievements AUTOSAR Products Future of AUTOSAR 3 Achievements new concepts in
Current status and Future of AUTOSAR Markus Bechter 7 th AUTOSAR Open Conference Oct. 22 nd -23 rd 2014, Detroit Overview Achievements AUTOSAR Products Future of AUTOSAR 3 Achievements new concepts in
Experiences with CANoe-based Fault Injection for AUTOSAR
 Experiences with CANoe-based Fault Injection for AUTOSAR Patrick E. Lanigan, Priya Narasimhan Electrical & Computer Engineering Carnegie Mellon University Thomas E. Fuhrman Research & Development General
Experiences with CANoe-based Fault Injection for AUTOSAR Patrick E. Lanigan, Priya Narasimhan Electrical & Computer Engineering Carnegie Mellon University Thomas E. Fuhrman Research & Development General
Driving virtual Prototyping of Automotive Electronics
 Driving virtual Prototyping of Electronics B. Hellenthal, AUDI AG, Competence Center Electronics & Semiconductor, DVCon, Munich, October 17 th, 2017 Project Idea More space for passengers enabled by decreasing
Driving virtual Prototyping of Electronics B. Hellenthal, AUDI AG, Competence Center Electronics & Semiconductor, DVCon, Munich, October 17 th, 2017 Project Idea More space for passengers enabled by decreasing
November 16, TTTech Computertechnik AG / TTTech Auto AG Copyright TTTech Auto AG. All rights reserved
 Future Mobility Approaches and Required Developments for On-board Networks and ADAS Computers Andreas ECKEL, Teamlead Grants Jan RADKE, Cooperation Manager TTTech Computertechnik AG / TTTech Auto AG November
Future Mobility Approaches and Required Developments for On-board Networks and ADAS Computers Andreas ECKEL, Teamlead Grants Jan RADKE, Cooperation Manager TTTech Computertechnik AG / TTTech Auto AG November
Software architecture in ASPICE and Even-André Karlsson
 Software architecture in ASPICE and 26262 Even-André Karlsson Agenda Overall comparison (3 min) Why is the architecture documentation difficult? (2 min) ASPICE requirements (8 min) 26262 requirements (12
Software architecture in ASPICE and 26262 Even-André Karlsson Agenda Overall comparison (3 min) Why is the architecture documentation difficult? (2 min) ASPICE requirements (8 min) 26262 requirements (12
AUTOMATIC FUNCTIONALITY ASSIGNMENT TO AUTOSAR MULTICORE DISTRIBUTED ARCHITECTURES
 AUTOMATIC FUNCTIONALITY ASSIGNMENT TO AUTOSAR MULTICORE DISTRIBUTED ARCHITECTURES Florin Maticu, Paul Pop Technical University of Denmark (DTU) Axbrink Christian, Islam Mafijul Volvo Group Trucks Technology,
AUTOMATIC FUNCTIONALITY ASSIGNMENT TO AUTOSAR MULTICORE DISTRIBUTED ARCHITECTURES Florin Maticu, Paul Pop Technical University of Denmark (DTU) Axbrink Christian, Islam Mafijul Volvo Group Trucks Technology,
European Conference on Nanoelectronics and Embedded Systems for Electric Mobility
 European Conference on Nanoelectronics and Embedded Systems for Electric Mobility ecocity emotion 24-25 th September 2014, Erlangen, Germany Scalable Functional Safety Architecture for Electric Mobility
European Conference on Nanoelectronics and Embedded Systems for Electric Mobility ecocity emotion 24-25 th September 2014, Erlangen, Germany Scalable Functional Safety Architecture for Electric Mobility
SW-Update. Thomas Fleischmann June 5 th 2015
 Thomas Fleischmann June 5 th 2015 2 3 Agenda The big picture SW-Update today Diagnostics vs SW-Update Our solution for SW-Update The real challenges beyond getting a file into the car Elektrobit (EB),
Thomas Fleischmann June 5 th 2015 2 3 Agenda The big picture SW-Update today Diagnostics vs SW-Update Our solution for SW-Update The real challenges beyond getting a file into the car Elektrobit (EB),
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Nadym Salem, Jan Hegewald Carmeq GmbH Dealing with the Challenges for Future Software Systems in the Automotive Industry with the AUTOSAR Standards AUTOSAR Nov-2017 Dealing
10 th AUTOSAR Open Conference Nadym Salem, Jan Hegewald Carmeq GmbH Dealing with the Challenges for Future Software Systems in the Automotive Industry with the AUTOSAR Standards AUTOSAR Nov-2017 Dealing
Secure Ethernet Communication for Autonomous Driving. Jared Combs June 2016
 Secure Ethernet Communication for Autonomous Driving Jared Combs June 2016 Agenda Motivation for Security The Multi-Level Security Architecture Proposal Level 1: Restrict access to the network Level 2:
Secure Ethernet Communication for Autonomous Driving Jared Combs June 2016 Agenda Motivation for Security The Multi-Level Security Architecture Proposal Level 1: Restrict access to the network Level 2:
Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007
 Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007 Automotive Networks complex networks hundreds of functions 50+ ECUs (Electronic Control Unit)
Automotive Networks Are New Busses and Gateways the Answer or Just Another Challenge? ESWEEK Panel Oct. 3, 2007 Automotive Networks complex networks hundreds of functions 50+ ECUs (Electronic Control Unit)
Isolation of Cores. Reduce costs of mixed-critical systems by using a divide-and-conquer startegy on core level
 Isolation of s Reduce costs of mixed-critical systems by using a divide-and-conquer startegy on core level Claus Stellwag, Elektrobit Automotive GmbH; Thorsten Rosenthal, Delphi; Swapnil Gandhi, Delphi
Isolation of s Reduce costs of mixed-critical systems by using a divide-and-conquer startegy on core level Claus Stellwag, Elektrobit Automotive GmbH; Thorsten Rosenthal, Delphi; Swapnil Gandhi, Delphi
Adaptive AUTOSAR Extending the Scope of AUTOSAR-based Embedded Software
 Adaptive AUTOSAR Extending the Scope of AUTOSAR-based Embedded Software Vector Congress 2017, September 6 th 7 th, Shanghai China V0.1 2017-08-04 Introduction Use Cases for Adaptive AUTOSAR Infotainment
Adaptive AUTOSAR Extending the Scope of AUTOSAR-based Embedded Software Vector Congress 2017, September 6 th 7 th, Shanghai China V0.1 2017-08-04 Introduction Use Cases for Adaptive AUTOSAR Infotainment
AUTOSAR proofs to be THE automotive software platform for intelligent mobility
 AUTOSAR proofs to be THE automotive software platform for intelligent mobility Dr.-Ing. Thomas Scharnhorst AUTOSAR Spokesperson Simon Fürst, BMW AG Stefan Rathgeber, Continental Corporation Lorenz Slansky,
AUTOSAR proofs to be THE automotive software platform for intelligent mobility Dr.-Ing. Thomas Scharnhorst AUTOSAR Spokesperson Simon Fürst, BMW AG Stefan Rathgeber, Continental Corporation Lorenz Slansky,
Hardening Attack Vectors to cars by Fuzzing
 Hardening Attack Vectors to cars by Fuzzing AESIN 2015 Ashley Benn, Regional Sales manager 29 th October, 2015 2015 Synopsys, Inc. 1 Today, there are more than 100m lines of code in cars 2015 Synopsys,
Hardening Attack Vectors to cars by Fuzzing AESIN 2015 Ashley Benn, Regional Sales manager 29 th October, 2015 2015 Synopsys, Inc. 1 Today, there are more than 100m lines of code in cars 2015 Synopsys,
Introducing a new temporal partitioning scheme to AUTOSAR OS
 8 th AUTOSAR Open Conference Introducing a new temporal partitioning scheme to AUTOSAR OS 29 th Oct., 2015 Hiroaki TAKADA Professor, Inst. of Innovation for Future Society, Nagoya Univ. Executive Director
8 th AUTOSAR Open Conference Introducing a new temporal partitioning scheme to AUTOSAR OS 29 th Oct., 2015 Hiroaki TAKADA Professor, Inst. of Innovation for Future Society, Nagoya Univ. Executive Director
Ethernet TSN as Enabling Technology for ADAS and Automated Driving Systems
 IEEE-2016 January 17-22, Atlanta, Georgia Ethernet TSN as Enabling Technology for ADAS and Automated Driving Systems Michael Potts General Motors Company co-authored by Soheil Samii General Motors Company
IEEE-2016 January 17-22, Atlanta, Georgia Ethernet TSN as Enabling Technology for ADAS and Automated Driving Systems Michael Potts General Motors Company co-authored by Soheil Samii General Motors Company
ADAS: A Safe Eye on The Road
 ADAS: A Safe Eye on The Road FTF-AUT-F0334 Allan McAuslin Product Manager A P R. 2 0 1 4 TM External Use Mobility Innovation Factors Cleaner world Safer World Secure Connectivity Mobility for everyone
ADAS: A Safe Eye on The Road FTF-AUT-F0334 Allan McAuslin Product Manager A P R. 2 0 1 4 TM External Use Mobility Innovation Factors Cleaner world Safer World Secure Connectivity Mobility for everyone
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Rinat Asmus AUTOSAR Project Leader BMW AUTOSAR Adaptive Platform AUTOSAR Nov-2017 New Challenges One Standard. Do AUTOSAR Core partners commit to standard use? Is the implementation
10 th AUTOSAR Open Conference Rinat Asmus AUTOSAR Project Leader BMW AUTOSAR Adaptive Platform AUTOSAR Nov-2017 New Challenges One Standard. Do AUTOSAR Core partners commit to standard use? Is the implementation
Automotive and Aerospace Synergies
 Corporate Technical Office Automotive and Aerospace Synergies Potential for common activities Denis Chapuis, EADS Corporate Technical Office, Electronics denis.chapuis@eads.net Seite 1 Presentation title
Corporate Technical Office Automotive and Aerospace Synergies Potential for common activities Denis Chapuis, EADS Corporate Technical Office, Electronics denis.chapuis@eads.net Seite 1 Presentation title
Virtual Hardware ECU How to Significantly Increase Your Testing Throughput!
 Virtual Hardware ECU How to Significantly Increase Your Testing Throughput! Elektrobit Tech Day Jason Niatas Synopsys Inc. July 27, 2017 2017 Synopsys, Inc. 1 Agenda Automotive electronic evolution and
Virtual Hardware ECU How to Significantly Increase Your Testing Throughput! Elektrobit Tech Day Jason Niatas Synopsys Inc. July 27, 2017 2017 Synopsys, Inc. 1 Agenda Automotive electronic evolution and
New ARMv8-R technology for real-time control in safetyrelated
 New ARMv8-R technology for real-time control in safetyrelated applications James Scobie Product manager ARM Technical Symposium China: Automotive, Industrial & Functional Safety October 31 st 2016 November
New ARMv8-R technology for real-time control in safetyrelated applications James Scobie Product manager ARM Technical Symposium China: Automotive, Industrial & Functional Safety October 31 st 2016 November
Riccardo Mariani, Intel Fellow, IOTG SEG, Chief Functional Safety Technologist
 Riccardo Mariani, Intel Fellow, IOTG SEG, Chief Functional Safety Technologist Internet of Things Group 2 Internet of Things Group 3 Autonomous systems: computing platform Intelligent eyes Vision. Intelligent
Riccardo Mariani, Intel Fellow, IOTG SEG, Chief Functional Safety Technologist Internet of Things Group 2 Internet of Things Group 3 Autonomous systems: computing platform Intelligent eyes Vision. Intelligent
Adaptive AUTOSAR Extending the Scope of AUTOSAR-based Embedded Software
 Adaptive AUTOSAR Extending the Scope of AUTOSAR-based Embedded Software Vector GB Ltd Annual Conference 2017, September 27 th 28 th V0.1 2017-09-26 Introduction Use Cases for Adaptive AUTOSAR Infotainment
Adaptive AUTOSAR Extending the Scope of AUTOSAR-based Embedded Software Vector GB Ltd Annual Conference 2017, September 27 th 28 th V0.1 2017-09-26 Introduction Use Cases for Adaptive AUTOSAR Infotainment
Handling Challenges of Multi-Core Technology in Automotive Software Engineering
 Model Based Development Tools for Embedded Multi-Core Systems Handling Challenges of Multi-Core Technology in Automotive Software Engineering VECTOR INDIA CONFERENCE 2017 Timing-Architects Embedded Systems
Model Based Development Tools for Embedded Multi-Core Systems Handling Challenges of Multi-Core Technology in Automotive Software Engineering VECTOR INDIA CONFERENCE 2017 Timing-Architects Embedded Systems
AMDC 2017 Liviona Multi-Core in Automotive Powertrain and Next Steps Towards Parallelization
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) AMDC 2017 Liviona Multi-Core in Automotive Powertrain and Ralph Mader, 25. April
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 11,0 cm) AMDC 2017 Liviona Multi-Core in Automotive Powertrain and Ralph Mader, 25. April
A Secure Update Architecture for High Assurance Mixed-Criticality System Don Kuzhiyelil Dr. Sergey Tverdyshev SYSGO AG
 A Secure Update Architecture for High Assurance Mixed-Criticality System Don Kuzhiyelil Dr. Sergey Tverdyshev SYSGO AG SYSGO AG 1 Secure Software Update Unified Diagnostic Services DiagnosticsSessionControl
A Secure Update Architecture for High Assurance Mixed-Criticality System Don Kuzhiyelil Dr. Sergey Tverdyshev SYSGO AG SYSGO AG 1 Secure Software Update Unified Diagnostic Services DiagnosticsSessionControl
Welcome Note. Dr. Thomas Scharnhorst, AUTOSAR Spokesperson 10 th AUTOSAR Open Conference 8 th Nov 2017, Mountain View, California
 Dr. Thomas Scharnhorst, AUTOSAR Spokesperson 10 th AUTOSAR Open Conference 8 th Nov 2017, Mountain View, California Welcome Willkommen Bienvenu 歡迎 Boas-vindas Welkom добро пожаловать ようこそ 환영합니다 Bienvenida
Dr. Thomas Scharnhorst, AUTOSAR Spokesperson 10 th AUTOSAR Open Conference 8 th Nov 2017, Mountain View, California Welcome Willkommen Bienvenu 歡迎 Boas-vindas Welkom добро пожаловать ようこそ 환영합니다 Bienvenida
Components & Characteristics of an Embedded System Embedded Operating System Application Areas of Embedded d Systems. Embedded System Components
 Components & Characteristics of an Embedded System Embedded Operating System Application Areas of Embedded d Systems Automotive Industrial Automation Building Automation etc. 1 2 Embedded System Components
Components & Characteristics of an Embedded System Embedded Operating System Application Areas of Embedded d Systems Automotive Industrial Automation Building Automation etc. 1 2 Embedded System Components
SPC5 MCAL overview. ZHANG Livia
 SPC5 MCAL overview ZHANG Livia Senior Application Engineer, Micro BU ADG Marketing and Application Greater China & South Asia Region STMicroelectronics AUTOSAR Idea 2 Standardize the software architecture
SPC5 MCAL overview ZHANG Livia Senior Application Engineer, Micro BU ADG Marketing and Application Greater China & South Asia Region STMicroelectronics AUTOSAR Idea 2 Standardize the software architecture
Automated Configuration of Time-Critical Multi-Configuration AUTOSAR Systems
 Automated Configuration of Time-Critical Multi-Configuration AUTOSAR Systems Master Thesis Submitted in Fulfilment of the Requirements for the Academic Degree M.Sc. Dept. of Computer Science Chair of Computer
Automated Configuration of Time-Critical Multi-Configuration AUTOSAR Systems Master Thesis Submitted in Fulfilment of the Requirements for the Academic Degree M.Sc. Dept. of Computer Science Chair of Computer
Design and Implementation of Android-based MobileSecond Platform Architecture & its Smart Care Service
 Design and Implementation of Android-based MobileSecond Platform Architecture & its Smart Care Service Joongjin Kook 1 Information Technology Department, Korea Electronics Technology Institute, Seoul,
Design and Implementation of Android-based MobileSecond Platform Architecture & its Smart Care Service Joongjin Kook 1 Information Technology Department, Korea Electronics Technology Institute, Seoul,
1000BASE-T1 from Standard to Series Production
 Concept Car VW I.D. Volkswagen AG 1000BASE-T1 from Standard to Series Production Enabling Next Generation Scalable Architecture Olaf Krieger (Volkswagen), Christopher Mash (Marvell) Agenda 2 Next generation
Concept Car VW I.D. Volkswagen AG 1000BASE-T1 from Standard to Series Production Enabling Next Generation Scalable Architecture Olaf Krieger (Volkswagen), Christopher Mash (Marvell) Agenda 2 Next generation
AUTOSAR Overview and Classic Platform
 AUTOSAR Overview and Classic Platform Igor Neiva Camargo AUTOSAR Project Leader Team Oct. 30 th 2015 8 th AOC, Tokyo Overview AUTOSAR Overview and Classic Platform The AUTOSAR Development Community - The
AUTOSAR Overview and Classic Platform Igor Neiva Camargo AUTOSAR Project Leader Team Oct. 30 th 2015 8 th AOC, Tokyo Overview AUTOSAR Overview and Classic Platform The AUTOSAR Development Community - The
Examining future priorities for cyber security management
 Examining future priorities for cyber security management Cybersecurity Focus Day Insurance Telematics 16 Andrew Miller Chief Technical Officer Thatcham Research Owned by the major UK Motor Insurers with
Examining future priorities for cyber security management Cybersecurity Focus Day Insurance Telematics 16 Andrew Miller Chief Technical Officer Thatcham Research Owned by the major UK Motor Insurers with
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Dr. Günther Heling Vector Informatik AUTOSAR Adaptive Platform Now it s Time to get on Board AUTOSAR Nov-2017 Introduction At the first glance Adaptive and Classic don t have
10 th AUTOSAR Open Conference Dr. Günther Heling Vector Informatik AUTOSAR Adaptive Platform Now it s Time to get on Board AUTOSAR Nov-2017 Introduction At the first glance Adaptive and Classic don t have
Automotive Security: Challenges, Standards and Solutions. Alexander Much 12 October 2017
 Automotive Security: Challenges, Standards and Solutions Alexander Much 12 October 2017 Driver s fears are being fueled by recent news Connected Cars, new opportunities for hackers Autonomous Driving Concepts
Automotive Security: Challenges, Standards and Solutions Alexander Much 12 October 2017 Driver s fears are being fueled by recent news Connected Cars, new opportunities for hackers Autonomous Driving Concepts
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel. Alexander Züpke, Marc Bommert, Daniel Lohmann
 AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
AUTOBEST: A United AUTOSAR-OS And ARINC 653 Kernel Alexander Züpke, Marc Bommert, Daniel Lohmann alexander.zuepke@hs-rm.de, marc.bommert@hs-rm.de, lohmann@cs.fau.de Motivation Automotive and Avionic industry
KSAR Support. for. ST s SPC5 32-bit Automotive MCUs
 KSAR Support for ST s SPC5 32-bit Automotive MCUs AUTOSAR Practice Facts and Numbers Our Offerings Our Credentials Our Investments Products AUTOSAR R4.0.3/R4.2.1 ICC3 compliant Basic Software Stack AUTOSAR
KSAR Support for ST s SPC5 32-bit Automotive MCUs AUTOSAR Practice Facts and Numbers Our Offerings Our Credentials Our Investments Products AUTOSAR R4.0.3/R4.2.1 ICC3 compliant Basic Software Stack AUTOSAR
Testing of automated driving systems
 TÜV SÜD AG Slide 1 Testing of automated driving systems Ondřej Vaculín TÜV SÜD Czech Outline TÜV SÜD AG 2016/09/21 IPG Apply and Innovate Slide 2 UN ECE Tests for ADAS Testing procedures for automated
TÜV SÜD AG Slide 1 Testing of automated driving systems Ondřej Vaculín TÜV SÜD Czech Outline TÜV SÜD AG 2016/09/21 IPG Apply and Innovate Slide 2 UN ECE Tests for ADAS Testing procedures for automated
VT System Smart HIL Testing
 VT System Smart HIL Testing V1.0 2010-06-04 Agenda > ECU Testing Testing a Door Control Unit Summary and Outlook Slide: 2 ECU Testing I/O Access for ECU Testing ECU has to be tested in its natural environment
VT System Smart HIL Testing V1.0 2010-06-04 Agenda > ECU Testing Testing a Door Control Unit Summary and Outlook Slide: 2 ECU Testing I/O Access for ECU Testing ECU has to be tested in its natural environment
Solving functional safety challenges in Automotive with NOR Flash Memory
 Solving functional safety challenges in Automotive with NOR Flash Memory Sandeep Krishnegowda Marketing Director Flash Business Unit Cypress Semiconductor 1 Flash Memory Summit 2018 / Santa Clara, CA Automotive
Solving functional safety challenges in Automotive with NOR Flash Memory Sandeep Krishnegowda Marketing Director Flash Business Unit Cypress Semiconductor 1 Flash Memory Summit 2018 / Santa Clara, CA Automotive
Mixed-Criticality Systems based on a CAN Router with Support for Fault Isolation and Selective Fault-Tolerance
 IFAC 2014 Mixed-Criticality Systems based on a Router with Support for Fault Isolation and Selective Fault-Tolerance Roland Kammerer 1, Roman Obermaisser², Mino Sharkhawy 1 1 Vienna University of Technology,
IFAC 2014 Mixed-Criticality Systems based on a Router with Support for Fault Isolation and Selective Fault-Tolerance Roland Kammerer 1, Roman Obermaisser², Mino Sharkhawy 1 1 Vienna University of Technology,
PREEvision Technical Article
 PREEvision Technical Article AUTOSAR-Conformant Vehicle Diagnostics over : Developing Diagnostic Communications for E/E Systems The electronically controlled systems of modern vehicles are networked with
PREEvision Technical Article AUTOSAR-Conformant Vehicle Diagnostics over : Developing Diagnostic Communications for E/E Systems The electronically controlled systems of modern vehicles are networked with
SIMPLIFYING THE CAR. Helix chassis. Helix chassis. Helix chassis WIND RIVER HELIX CHASSIS WIND RIVER HELIX DRIVE WIND RIVER HELIX CARSYNC
 W I N D R I V E R H E L I X C H A S S I S SIMPLIFYING THE WIND RIVER HELIX CHASSIS Helix Chassis brings together software, technologies, tools, and services to help automotive manufacturers unify, simplify,
W I N D R I V E R H E L I X C H A S S I S SIMPLIFYING THE WIND RIVER HELIX CHASSIS Helix Chassis brings together software, technologies, tools, and services to help automotive manufacturers unify, simplify,
AUTOSAR Method. Webinar
 AUTOSAR Method Webinar 2013-04-17 V2.1 2013-04-16 Agenda >Introduction AUTOSAR Method Exchange Formats Workflows OEM-TIER1 Workflows TIER1 Webinar Series Slide: 2 Introduction Current Workflow (non-autosar)
AUTOSAR Method Webinar 2013-04-17 V2.1 2013-04-16 Agenda >Introduction AUTOSAR Method Exchange Formats Workflows OEM-TIER1 Workflows TIER1 Webinar Series Slide: 2 Introduction Current Workflow (non-autosar)
Cooperative Vehicles Opportunity and Challenges
 Cooperative Vehicles Opportunity and Challenges State Smart Transportation Initiative Toyota Motor Engineering & Manufacturing North America (TEMA) Toyota Technical Center (TTC) Hideki Hada 4/24/2012 Presentation
Cooperative Vehicles Opportunity and Challenges State Smart Transportation Initiative Toyota Motor Engineering & Manufacturing North America (TEMA) Toyota Technical Center (TTC) Hideki Hada 4/24/2012 Presentation
Using Fault Injection to Verify an AUTOSAR Application According to the ISO 26262
 Using Fault Injection to Verify an AUTOSAR Application According to the ISO 26262 Ludovic Pintard, Michel Leeman, Abdelillah Ymlahi-Ouazzani, Jean-Charles Fabre, Karama Kanoun, Matthieu Roy To cite this
Using Fault Injection to Verify an AUTOSAR Application According to the ISO 26262 Ludovic Pintard, Michel Leeman, Abdelillah Ymlahi-Ouazzani, Jean-Charles Fabre, Karama Kanoun, Matthieu Roy To cite this
Fault-Injection testing and code coverage measurement using Virtual Prototypes on the context of the ISO standard
 Fault-Injection testing and code coverage measurement using Virtual Prototypes on the context of the ISO 26262 standard NMI Automotive Electronics Systems 2013 Event Victor Reyes Technical Marketing System
Fault-Injection testing and code coverage measurement using Virtual Prototypes on the context of the ISO 26262 standard NMI Automotive Electronics Systems 2013 Event Victor Reyes Technical Marketing System
STMicroelectronics Automotive MCU Technical Day
 STMicroelectronics Automotive MCU Technical Day 意法半导体汽车微控制器技术日 ETAS Embedded SW and Embedded Security Solutions 2017 年 ST 汽车 MCU 技术日 2017 年 6 月 6 日, 上海 2017 年 6 月 8 日, 深圳 2017 年 6 月 13 日, 北京 Embedded SW
STMicroelectronics Automotive MCU Technical Day 意法半导体汽车微控制器技术日 ETAS Embedded SW and Embedded Security Solutions 2017 年 ST 汽车 MCU 技术日 2017 年 6 月 6 日, 上海 2017 年 6 月 8 日, 深圳 2017 年 6 月 13 日, 北京 Embedded SW
Functional Safety on Multicore Microcontrollers for Industrial Applications. Thomas Barth (h-da) Prof. Dr.-Ing. Peter Fromm (h-da)
 Prof. Dr.-Ing. Peter Fromm (h-da)") Functional Safety on Multicore Microcontrollers for Industrial Applications Thomas Barth (h-da) Prof. Dr.-Ing. Peter Fromm (h-da) Contents Functional Safety Multicore Motivation ISO13849 Implemented Software
Functional Safety on Multicore Microcontrollers for Industrial Applications Thomas Barth (h-da) Prof. Dr.-Ing. Peter Fromm (h-da) Contents Functional Safety Multicore Motivation ISO13849 Implemented Software
Self-driving vehicles and their impact on the efficiency and safety of future transport
 Self-driving vehicles and their impact on the efficiency and safety of future transport Dipl.-Ing. Alexander Kraus Senior Vice President Automotive TÜV SÜD Group Our heritage: 150 years of business success
Self-driving vehicles and their impact on the efficiency and safety of future transport Dipl.-Ing. Alexander Kraus Senior Vice President Automotive TÜV SÜD Group Our heritage: 150 years of business success
Advanced Driver Assistance: Modular Image Sensor Concept
 Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Automotive ECU Design with Functional Safety for Electro-Mechanical Actuator Systems
 Automotive ECU Design with Functional Safety for Electro-Mechanical Actuator Systems Kyung-Jung Lee, Young-Hun Ki, and Hyun-Sik Ahn Abstract In this paper, we propose a hardware and software design method
Automotive ECU Design with Functional Safety for Electro-Mechanical Actuator Systems Kyung-Jung Lee, Young-Hun Ki, and Hyun-Sik Ahn Abstract In this paper, we propose a hardware and software design method
Real and Virtual Development with SystemDesk
 Real and Virtual Development with SystemDesk Joe Fairchild Project Manager Software Development and Validation dspace, Inc. Goals of AUTOSAR Create libraries of software components Reusable Hardware-independent
Real and Virtual Development with SystemDesk Joe Fairchild Project Manager Software Development and Validation dspace, Inc. Goals of AUTOSAR Create libraries of software components Reusable Hardware-independent
How Microcontrollers help GPUs in Autonomous Drive
 How Microcontrollers help GPUs in Autonomous Drive GTC 2017 Munich, 2017-10-12 Hans Adlkofer, VP Automotive System department Outline 1 Main Safety concepts 2 Sensor Fusion architecture and functionalities
How Microcontrollers help GPUs in Autonomous Drive GTC 2017 Munich, 2017-10-12 Hans Adlkofer, VP Automotive System department Outline 1 Main Safety concepts 2 Sensor Fusion architecture and functionalities
Safety and Security for Automotive using Microkernel Technology
 Informationstag "Das Automobil als IT-Sicherheitsfall" Berlin, 11.05.2012 Safety and Security for Automotive using Microkernel Technology Dr.-Ing. Matthias Gerlach OpenSynergy TwoBirds withonestone Safety
Informationstag "Das Automobil als IT-Sicherheitsfall" Berlin, 11.05.2012 Safety and Security for Automotive using Microkernel Technology Dr.-Ing. Matthias Gerlach OpenSynergy TwoBirds withonestone Safety
Virtualization of Heterogeneous Electronic Control Units Testing and Validating Car2X Communication
 Testing and Validating Car2X Communication 1 Public ETAS-PGA 2017-07-06 ETAS GmbH 2017. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, Testing and Validating Car2X
Testing and Validating Car2X Communication 1 Public ETAS-PGA 2017-07-06 ETAS GmbH 2017. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, Testing and Validating Car2X
Automotive Functional Safety
 Automotive Functional Safety Complexity, Confidence, Compliance, Certification Farmington, 2018-03-22 23.03.2018 150 years TÜV SÜD 150 years of inspiring trust Inspiring trust since 1866 The year 2016
Automotive Functional Safety Complexity, Confidence, Compliance, Certification Farmington, 2018-03-22 23.03.2018 150 years TÜV SÜD 150 years of inspiring trust Inspiring trust since 1866 The year 2016
A Safe Basis. Safety Functions Status and Challenge V
 A Safe Basis Safety Functions Status and Challenge V1.00.00 2016-09-06 Agenda 1. Introduction 2. MICROSAR Safe 3. Status and Outlook 4. Challenges 2 Introduction Evolution of Safety Concepts Partitioning
A Safe Basis Safety Functions Status and Challenge V1.00.00 2016-09-06 Agenda 1. Introduction 2. MICROSAR Safe 3. Status and Outlook 4. Challenges 2 Introduction Evolution of Safety Concepts Partitioning
Countermeasures against Cyber-attacks
 Countermeasures against Cyber-attacks Case of the Automotive Industry Agenda Automotive Basics ECU, domains, CAN Automotive Security Motivation, trends Hardware and Software Security EVITA, SHE, HSM Secure
Countermeasures against Cyber-attacks Case of the Automotive Industry Agenda Automotive Basics ECU, domains, CAN Automotive Security Motivation, trends Hardware and Software Security EVITA, SHE, HSM Secure
Securing the future of mobility
 Kaspersky Transportation System Security AVL Software and Functions Securing the future of mobility www.kaspersky.com #truecybersecurity Securing the future of mobility Connected car benefits The need
Kaspersky Transportation System Security AVL Software and Functions Securing the future of mobility www.kaspersky.com #truecybersecurity Securing the future of mobility Connected car benefits The need
ARM processors driving automotive innovation
 ARM processors driving automotive innovation Chris Turner Director of advanced technology marketing, CPU group ARM tech forums, Seoul and Taipei June/July 2016 The ultimate intelligent connected device
ARM processors driving automotive innovation Chris Turner Director of advanced technology marketing, CPU group ARM tech forums, Seoul and Taipei June/July 2016 The ultimate intelligent connected device
Platform modeling and allocation
 Platform modeling and allocation Systems Engineering BSc Course Budapest University of Technology and Economics Department of Measurement and Information Systems Traceability Platform-based systems design
Platform modeling and allocation Systems Engineering BSc Course Budapest University of Technology and Economics Department of Measurement and Information Systems Traceability Platform-based systems design
Cybersecurity Challenges for Connected and Automated Vehicles. Robert W. Heller, Ph.D. Program Director R&D, Southwest Research Institute
 Cybersecurity Challenges for Connected and Automated Vehicles Robert W. Heller, Ph.D. Program Director R&D, Southwest Research Institute Cars are becoming complex (and CAV is only part of it) 1965: No
Cybersecurity Challenges for Connected and Automated Vehicles Robert W. Heller, Ph.D. Program Director R&D, Southwest Research Institute Cars are becoming complex (and CAV is only part of it) 1965: No
Automotive Anomaly Monitors and Threat Analysis in the Cloud
 Automotive Anomaly Monitors and Threat Analysis in the Cloud Dr. André Weimerskirch Vector Automotive Cyber Security Symposium October 12, 2017 Cybersecurity Components Secure Internal & External Communications
Automotive Anomaly Monitors and Threat Analysis in the Cloud Dr. André Weimerskirch Vector Automotive Cyber Security Symposium October 12, 2017 Cybersecurity Components Secure Internal & External Communications
Arm Technology in Automotive Geely Automotive Shanghai Innovation Center
 Arm Technology in Automotive Geely Automotive Shanghai Innovation Center 2018/10/22 Shanghai GIC(Geely Innovation Center)Brief Introduction Innovation Center (Belongs to GRI) Vision: To be world-leading
Arm Technology in Automotive Geely Automotive Shanghai Innovation Center 2018/10/22 Shanghai GIC(Geely Innovation Center)Brief Introduction Innovation Center (Belongs to GRI) Vision: To be world-leading
STMicroelectronics Automotive MCU Technical Day 意法半导体汽车微控制器技术日 2017 年 ST 汽车 MCU 技术日 2017 年 6 月 6 日, 上海 2017 年 6 月 8 日, 深圳 2017 年 6 月 13 日, 北京
 STMicroelectronics Automotive MCU Technical Day 意法半导体汽车微控制器技术日 2017 年 ST 汽车 MCU 技术日 2017 年 6 月 6 日, 上海 2017 年 6 月 8 日, 深圳 2017 年 6 月 13 日, 北京 KSAR Support for ST s SPC5 32-bit Automotive MCUs AUTOSAR NOS
STMicroelectronics Automotive MCU Technical Day 意法半导体汽车微控制器技术日 2017 年 ST 汽车 MCU 技术日 2017 年 6 月 6 日, 上海 2017 年 6 月 8 日, 深圳 2017 年 6 月 13 日, 北京 KSAR Support for ST s SPC5 32-bit Automotive MCUs AUTOSAR NOS
Software Architecture. Lecture 4
 Software Architecture Lecture 4 Last time We discussed tactics to achieve architecture qualities We briefly surveyed architectural styles 23-Jan-08 http://www.users.abo.fi/lpetre/sa08/ 2 Today We check
Software Architecture Lecture 4 Last time We discussed tactics to achieve architecture qualities We briefly surveyed architectural styles 23-Jan-08 http://www.users.abo.fi/lpetre/sa08/ 2 Today We check
The Adaptive Platform for Future Use Cases
 The Adaptive Platform for Future Use Cases Vector Congress 2016 - Stuttgart, 2016-11-30 V0.1 2016-09-21 Agenda Introduction Adaptive AUTOSAR Architecture Use Cases and Requirements Adaptive AUTOSAR at
The Adaptive Platform for Future Use Cases Vector Congress 2016 - Stuttgart, 2016-11-30 V0.1 2016-09-21 Agenda Introduction Adaptive AUTOSAR Architecture Use Cases and Requirements Adaptive AUTOSAR at
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Pierre-Antoine Bernard OpenSynergy GmbH Cornel Izbasa OpenSynergy GmbH Virtualization Solutions for the AUTOSAR Classic and Adaptive Platforms AUTOSAR Nov-2017 OpenSynergy
10 th AUTOSAR Open Conference Pierre-Antoine Bernard OpenSynergy GmbH Cornel Izbasa OpenSynergy GmbH Virtualization Solutions for the AUTOSAR Classic and Adaptive Platforms AUTOSAR Nov-2017 OpenSynergy
Adaptive AUTOSAR. Ready for Next Generation ECUs V
 Adaptive AUTOSAR Ready for Next Generation ECUs V0.4 2017-10-18 Introduction Being Prepared for the Next-Generation of ECUs Additional, high performance ECUs hosting applications for upcoming use cases
Adaptive AUTOSAR Ready for Next Generation ECUs V0.4 2017-10-18 Introduction Being Prepared for the Next-Generation of ECUs Additional, high performance ECUs hosting applications for upcoming use cases
Experiences with AUTOSAR compliant Autocode generation using TargetLink
 dspace User Conference 2010 India Sept 24 th 10 Experiences with AUTOSAR compliant Autocode generation using TargetLink Naveen Alwandi, Manjunath BC Delphi Electronics & Safety ABSTRACT Increased safety,
dspace User Conference 2010 India Sept 24 th 10 Experiences with AUTOSAR compliant Autocode generation using TargetLink Naveen Alwandi, Manjunath BC Delphi Electronics & Safety ABSTRACT Increased safety,
Safety Argument based on GSN for Automotive Control Systems. Yutaka Matsubara Nagoya University
 1 Safety Argument based on GSN for Automotive Control Systems Yutaka Matsubara Nagoya University yutaka@ertl.jp 02.26.2014 2 Agenda 1. Safety argument in ISO26262 2. Requirements related to safety argument
1 Safety Argument based on GSN for Automotive Control Systems Yutaka Matsubara Nagoya University yutaka@ertl.jp 02.26.2014 2 Agenda 1. Safety argument in ISO26262 2. Requirements related to safety argument
Future Implications for the Vehicle When Considering the Internet of Things (IoT)
") Future Implications for the Vehicle When Considering the Internet of Things (IoT) FTF-AUT-F0082 Richard Soja Automotive MCU Systems Engineer A P R. 2 0 1 4 TM External Use Agenda Overview of Existing Automotive
Future Implications for the Vehicle When Considering the Internet of Things (IoT) FTF-AUT-F0082 Richard Soja Automotive MCU Systems Engineer A P R. 2 0 1 4 TM External Use Agenda Overview of Existing Automotive
Autonomous Driving needs Safety & Security. Embedded World 2018 Dr. Ciwan Gouma
 Autonomous Driving needs Safety & Security Embedded World 2018 Dr. Ciwan Gouma Autonomous Driving The Vision The vision is not new. Picture left (maybe you have seen this in other presentations) but why
Autonomous Driving needs Safety & Security Embedded World 2018 Dr. Ciwan Gouma Autonomous Driving The Vision The vision is not new. Picture left (maybe you have seen this in other presentations) but why
MATLAB Expo Simulation Based Automotive Communication Design using MATLAB- SimEvent. Sudhakaran M Anand H General Motors
 MATLAB Expo 2013 Simulation Based Automotive Communication Design using MATLAB- SimEvent Sudhakaran M Anand H General Motors 1 Agenda Introduction Different Analysis Methods Analytical vs. Simulation Approach
MATLAB Expo 2013 Simulation Based Automotive Communication Design using MATLAB- SimEvent Sudhakaran M Anand H General Motors 1 Agenda Introduction Different Analysis Methods Analytical vs. Simulation Approach
Techday Mobile Electronics Open, connected, scalable With BODAS into the digital future
 Techday 2017 Mobile Electronics Open, connected, scalable Martin Sykora DC-MH/SPL Technical Sales Manager Mobile Electronics 24.-25. October 2017 1 The Internet of Things 3 examples of how we are getting
Techday 2017 Mobile Electronics Open, connected, scalable Martin Sykora DC-MH/SPL Technical Sales Manager Mobile Electronics 24.-25. October 2017 1 The Internet of Things 3 examples of how we are getting
Frequently Asked Questions
 Product Name: System Basis Chips (SBCs) Date: April 2013 Application: Automotive ECUs Datasheet: www.infineon.com/sbc Contact Person: Norbert Ulshoefer/Antonio Monetti Note: The following information is
Product Name: System Basis Chips (SBCs) Date: April 2013 Application: Automotive ECUs Datasheet: www.infineon.com/sbc Contact Person: Norbert Ulshoefer/Antonio Monetti Note: The following information is