Speculative High-Performance Simulation. Alessandro Pellegrini A.Y. 2017/2018
|
|
|
- Janice Stafford
- 5 years ago
- Views:
Transcription

1 Speculative High-Performance Simulation Alessandro Pellegrini A.Y. 2017/2018
2 Simulation From latin simulare (to mimic or to fake) It is the imitation of a real-world process' or system's operation over time It allows to collect results long before a system is actually built (what-if analysis) It can be used to drive physical systems (symbiotic simulation) Widely used: medicine, biology, physics, economics, sociology,...



3 Some Examples
4 Main Categories of Simulation Continuous Simulation Monte Carlo Simulation Discrete-Event Simulation
5 Wall-Clock Time vs Logical Time Two different notions of time are present in a simulation Wall-Clock Time: the elapsed time required to carry on a digital simulation (the shorter, the higher is the performance) Logical Time: the actual simulated time Also referred to as simulation time
6 Continuous Simulation It is typically employed for modeling physical phenomena Usually relies on a set of equations to be solved periodically Commonly physical phenomena are expressed via differential equations A continuous simulation involves repeatedly solving equations to update the state of the modeled phenomenon
7 An Example: Diffusion Equation Let's consider the Bidimensional Diffusion Equation Case: or, more compactly:
8 An Example: Diffusion Equation We approximate u(x, y, t) by a discrete function u i,j (m) x = iδx y = iδy t = iδt This approximation is not enough for simulation: we must be able to compute a future state starting from the current one We use finite difference to transform it into a recurrence relation
9 Finite Difference A finite difference is a mathematical expression of the form f(x+b) - f(x+a) Forward difference: Δ h [f](x) = f(x+h) - f(x) Backward difference: h [f](x) = f(x) - f(x - h) Central difference: δ h [f](x) = f(x + ½h) - f(x - ½h) Using finite difference, the finite-difference method can be applied to solve differential equations Finite differences are used to approximate derivatives: it is a discretization method
10 An Example: Diffusion Equation Applying finite (forward) difference approximations to the derivatives we obtain: To simulate, we transform it into: This gives us an expression of u i,j (m+1)
11 Stability of the Simulation This is an approximation of a continuous system Is the result correct independently of the selected time step? Stability reflects the sensitivity of Differential Equation solution to perturbations If the solutions are stable, they converge and perturbations are damped out When we step from an approximation to the next, we land on a different solution from what we started from
12 An Example: Diffusion Equation In case of 2D Heat Simulation, we rewrite u t as: The resulting amplification factor becomes: Neumann boundary conditions lead to:
13 An Example: Diffusion Equation We know that -2 cos(βδx) and -2 cos(γδy) -1 0 The right-hand inequality holds for all β and γ The left-hand inequality leads to:
14 How is this useful programmatically? Simulation is an approximation of reality We want our approximation to resemble reality as much as possible Setting a simulation time step such that: gives a simulation which is incorrect
15 Initial and Boundary Conditions u i,j (m+1) is derived using u i,j (m) Then, we must give a numerical value to u i,j (0) Furthermore, we must specify boundary conditions to the Laplacian We can arbitrarily set it to 0

16 Evolution of the System
17 Coding the Problem We repeatedly solve the differential equations We rely on a loop to do this: The code to update the state of the system looks like:
18 Coding the Problem: Initial Conditions
19 EXAMPLE SESSION Heat Diffusion Simulation in Python
20 What Lessons Have we Learnt? Before going distributed, we must be sure that the sequential implementation is efficient Stability conditions are not only a mathematician's concern! Continuous simulation is actually an approximation of the continuous behaviour of a system
21 Monte Carlo Simulation It is generally used to evaluate some property that is time independent It tries to explore densely the whole space of parameters of the phenomenon Monte Carlo simulations sample probability distribution for each variable to produce hundreds or thousands of possible outcomes It is used to find (approximate) solutions of mathematical problems involving a high number of variables that cannot be easily solved analytically
 2 = 2 2 = 4 The ratio of the areas is:")
22 An Example: Computing π Let us consider a circle with r = 1 The area of the circle is πr 2 = π The area of the sourrounding square is (2r) 2 = 2 2 = 4 The ratio of the areas is:

23 An Example: Computing π Randomly select points {(xi, yi)} n i=1 in the square Determine the ratio m is the number of points such that x i 2 + y i 2 1 Since, then
24 EXAMPLE SESSION Monte Carlo PI Approximation
25 Event-Driven Programming Event-Driven Programming is a programming paradigm in which the flow of the program is determined by events Sensors outputs User actions Messages from other programs or threads Based on a main loop divided into two phases: Event selection/detection Event handling Events resemble what interrupts do in hardware systems
26 Event Handlers An event handler is an asynchronous callback Each event represents a piece of application-level information, delivered from the underlying framework: In a GUI events can be mouse movements, key pression, action selection,... Events are processed by an event dispatcher which manages associations between events and event handlers and notifies the correct handler Events can be queued for later processing if the involved handler is busy at the moment
27 Discrete Event Simulation (DES) A discrete event occurs at an instant in time and marks a change of state in the system DES represents the operation of a system as a chronological sequence of events If the simulation is run on top of a parallel/distributed system, it's named Parallel Discrete Event Simulation (PDES)
28 DES Building Blocks Clock Independently of the measuring unit, the simulation must keep track of the current simulation time Being discrete, time hops to the next event s time Event List At least the pending event set must be maintained by the simulation architecture Events can arrive at a higher rate than they can be processed Random Number Generators Statistics Ending Condition
29 DES Skeleton
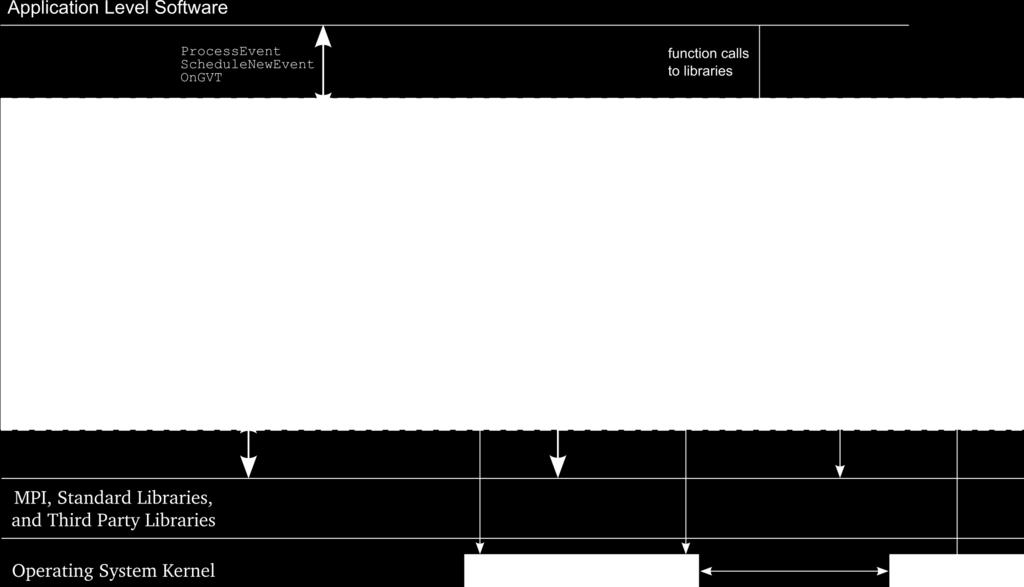
30 Implementation of a DES Kernel General-purpose Simulation is easy for DES No notion of model in the main-loop pseudocode! Only prerequisites: The model must implement actual handlers The model requires APIs to inject new events in the system and pass entities' states from the kernel Multiple models can be run on the same kernel Core reuse Model-independent optimization of the kernel
31 API to Schedule Events and Set State
32 API to Schedule Events and Set State
33 API to Schedule Events and Set State
34 Initialization and Main Loop
35 Initialization and Main Loop
36 Initialization and Main Loop
37 Personal Communication Service Networking System for mobile devices Interesting to study how different configurations behave Coverage area modeled as a set of adjacent hexagons Explicit modeling of channel allocation
38 EXAMPLE SESSION Personal Communication Service
39 Parallel Discrete Event Simulation To increase the overall performance, DES models can be run on top of multiple computing nodes Distributed and/or concurrent simulation The main goal is transparency Simulation models should not be modified
40 Traditional PDES execution support
41 Why are multicores important?
42 Revisited PDES Architecture LP LP LP LP LP LP LP LP LP LP LP LP LP Kernel Kernel Kernel CPU CPU CPU CPU CPU CPU CPU CPU Machine Machine Communication Network
43 Revisited PDES Archietcture LP LP LP LP LP LP LP LP LP LP LP LP LP Kernel Kernel Kernel CPU CPU CPU CPU CPU CPU CPU CPU Machine Machine Communication Network
44 Is this effective as is? No! The multithreaded nature requires several optimizations: Message exchange (syncrhonization among threads) Memory access patterns (NUMA machines) Yet this opens to new opportunities Load sharing Exchange of pointers among LPs
45 The Synchronization Problem Consider a simulation program composed of several logical processes exchanging timestamped messages Consider the sequential execution: this ensures that events are processed in timestamp order Consider the parallel execution: the greatest opportunity arises from processing events from different LPs concurrently Is correctness always ensured?
46 The Synchronization Problem LP i Execution Time Message LP j Execution Time Events Timestamps Message 11 Straggler Message LP k Execution Time
47 Conservative Synchronization Consider the LP with the smallest clock value at some instant T in the simulation's execution This LP could generate events relevant to every other LP in the simulation with a timestamp T No LP can process any event with timestamp larger than T
48 Conservative Synchronization If each LP has a lookahead of L, then any new message sent by al LP must have a timestamp of at least T + L Any event in the interval [T, T + L] can be safely processed L is intimately related to details of the simulation model
49 Optimistic Synchronization: Time Warp There are no state variables that are shared between LPs Communications are assumed to be reliable LPs need not to send messages in timestamp order Local Control Mechanism Events not yet processed are stored in an input queue Events already processed are not discarded Global Control Mechanism Event processing can be undone A-posteriori detection of causality violation
50 Time Warp: State Recoverability LP i 3 6 Message 8 Rollback Execution: recovering state at LVT 6 15 Execution Time LP j 6 Events Timestamps 9 Message Straggler Message Antimessage 11 8 Rollback Execution: recovering state at LVT 5 Execution Time LP k Execution Time Antimessage reception
51 Rollback Operation The rollback operation is fundamental to ensure a correct speculative simulation Its time critical: it is often executed on the critical path of the simulation engine 30+ years of research have tried to find optimized ways to increase its performance
52 State Saving and Restore The traditional way to support a rollback is to rely on state saving and restore A state queue is introduced into the engine Upon a rollback operations, the "closest" log is picked from the queue and restored What are the technological problems to solve? What are the methodological problems to solve?
53 State Saving and Restore State Queue Simulation Time Input Queue Simulation Time Output Queue Simulation Time
54 State Saving and Restore State Queue Simulation Time Input Queue Simulation Time Output Queue Simulation Time
55 State Saving and Restore State Queue Simulation Time bound Input Queue Simulation Time Output Queue Simulation Time
56 State Saving and Restore State Queue Simulation Time Input Queue bound Simulation Time Output Queue Simulation Time
57 State Saving and Restore State Queue Input Queue 3 bound Simulation Time Simulation Time Output Queue Simulation Time
58 State Saving and Restore State Queue Input Queue 3 bound Simulation Time Simulation Time Output Queue Simulation Time
59 State Saving and Restore State Queue bound Simulation Time Input Queue Simulation Time Output Queue Simulation Time
60 State Saving and Restore State Queue Input Queue bound Simulation Time Simulation Time Output Queue Simulation Time
61 State Saving and Restore State Queue Input Queue bound Simulation Time Simulation Time Output Queue Simulation Time
62 State Saving and Restore State Queue Input Queue bound Simulation Time Simulation Time Output Queue Simulation Time
63 State Saving and Restore State Queue Input Queue bound Simulation Time Simulation Time Output Queue Simulation Time
64 State Saving and Restore State Queue Input Queue bound Simulation Time Simulation Time Output Queue Simulation Time
65 State Saving and Restore State Queue Input Queue bound Simulation Time Simulation Time Output Queue Simulation Time
66 State Saving and Restore State Queue Input Queue 3 bound Simulation Time Simulation Time Output Queue Simulation Time
67 State Saving and Restore State Queue Input Queue 3 bound Simulation Time Simulation Time Output Queue Simulation Time Antimessages
68 State Saving and Restore State Queue Input Queue 3 bound Simulation Time Simulation Time Output Queue Simulation Time
69 State Saving and Restore State Queue Input Queue 3 bound Simulation Time Simulation Time Output Queue Simulation Time
70 State Saving and Restore State Queue Input Queue 3 bound Simulation Time Simulation Time Output Queue Simulation Time
71 State Saving Efficiency How large is the simulation state? How often do we execute a rollback? (rollback frequency) How many events do we have to undo on average? Can we do something better?
72 Copy State Saving
73 Sparse State Saving (SSS)
74 Coasting Forward Re-execution of already-processed events These events have been artificially undone! Antimessages have not been sent These events must be reprocessed in silent execution Otherwise, we duplicate messages in the system!
75 When to take a checkpoint? Classical approach: periodic state saving Is this efficient? Think in terms of memory footprint and wall-clock time requirements
76 When to take a checkpoint? Classical approach: periodic state saving Is this efficient? Think in terms of memory footprint and wall-clock time requirements Model-based decision making This is the basis for autonomic self-optimizing systems Goal: find the best-suited value for χ
77 When to take a checkpoint? δ s : average time to take a snapshot δ c : the average time to execute coasting forward N: total number of committed events k r : number of executed rollbacks γ: average rollback length
78 Incremental State Saving (ISS) If the state is large and scarcely updated, ISS might provide a reduced memory footprint and a non-negligible performance increase! How to know what state portions have been modified?
79 Incremental State Saving (ISS) If the state is large and scarcely updated, ISS might provide a reduced memory footprint and a non-negligible performance increase! How to know what state portions have been modified? Explicit API notification (non-transparent!) Operator Overloading Static Binary Instrumentation
80 Reverse Computation It can reduce state saving overhead Each event is associated (manually or automatically) with a reverse event A majority of the operations that modify state variables are constructive in nature the undo operation for them requires no history Destructive operations (assignment, bit-wise operations,...) can only be restored via traditional state saving


81 Reversible Operations
82 Non-Reversible Operations: if/then/else if(qlen > 0) { qlen--; sent++; } if(qlen "was" > 0) { } sent--; qlen++; The reverse event must check an "old" state variables' value, which is not available when processing it!
83 Non-Reversible Operations: if/then/else if(qlen > 0) { b = 1; qlen--; sent++; } if(b == 1) { sent--; qlen++; } Forward events are modified by inserting "bit variables"; The are additional state variables telling whether a particular branch was taken or not during the forward execution
84 Random Number Generators Fundamental support for stochastic simulation They must be aware of the rollback operation! Failing to rollback a random sequence might lead to incorrect results (trajectory divergence) Think for example to the coasting forward operation Computers are precise and deterministic: Where does randomness come from?
85 Random Number Generators Practical computer "random" generators are common in use They are usually referred to as pseudo-random generators What is the correct definition of randomness in this context?
86 Random Number Generators The deterministic program that produces a random sequence should be different from, and in all measurable respects statistically uncorrelated with, the computer program that uses its output Two different RNGs must produce statistically the same results when coupled to an application The above definition might seem circular: comparing one generator to another! There is a certain list of statistical tests
87 Uniform Deviates They are random numbers lying in a specified range (usually [0,1]) Other random distributions are drawn from a uniform deviate An essential building block for other distributions Usually, there are system-supplied RNGs:
88 Problems with System-Supplied RNGs If you want a random float in [0.0, 1.0): x = rand() / (RAND_MAX + 1.0); Be very (very!) suspicious of a system-supplied rand() that resembles the above-described one T h e y b e l o n g t o t h e c a t e g o r y o f l i n e a r congruential generators I j+1 = a I j + c (mod m) The recurrence will eventually repeat itself, with a period no greater than m
89 Problems with System-Supplied RNGs If m, a, and c are properly chosen, the period will be of maximal length (m) all possible integers between 0 anbd m - 1 will occur at some point In general, it may look a good idea Many ANSI-C implementations are flawed
90 An example RNG (from libc)
91 An example RNG (from libc) This is where we can support the rollback operation: consider the seed as part of the simulation state!

92 Problems with System-Supplied RNGs

93 Problems with System-Supplied RNGs In an n-dimensional space, the points lie on at most m 1/n hyperplanes!
94 Functions of Uniform Deviates The probability p(x)dx of generating a number between x and x+dx is: p(x) is normalized: If we take some function of x like y(x):
95 Exponential Deviates Suppose that y(x) -ln(x), and that p(x) is uniform: This is distributed exponentially Exponential distribution is fundamental in simulation Poisson-random events, for example the radioactive decay of nuclei, or the more general interarrival time
96 Exponential Deviates

97 Deviate Transformation
98 Scheduling Events LP LP LP LP LP LP LP LP LP LP LP LP LP Kernel Kernel Kernel CPU CPU CPU CPU CPU CPU CPU CPU Machine Machine Communication Network
99 Scheduling Events A single thread takes care of a certain number of LPs at any time We have to avoid inter-lps rollbacks Lowest-Timestamp First: Scan the input queue of all LPs Check the bound of each LP Pick the LP whose next event is closest in simulation time
100 Global Virtual Time In a PDES system, memory is always increasing We do not discard events We take a lot of snapshots! We must find a way to implement a garbage collector During the execution of an event at time T, we can schedule events at time t T
101 Global Virtual Time At a specific wall-clock time t, the GVT is defined as the minimum between: All virtual times in all virtual clocks at time t; The timestamps of all sent but not yet processed events at time t
102 Global Virtual Time LP i 3 6 Execution Time LP j 6 9 Execution Time Events Timestamps Message 11 LP k 5 Execution Time
103 Global Virtual Time LP i 3 6 Execution Time LP j 6 9 Execution Time Events Timestamps Message 11 LP k 5 Execution Time
104 Global Virtual Time LP i 3 6 Execution Time LP j 6 9 Execution Time Events Timestamps Message 11 LP k 5 Execution Time
105 Global Virtual Time LP i 3 31 Execution Time LP j Execution Time Events Timestamps Message 11 LP k 5 15 Execution Time
106 Global Virtual Time LP i 3 31 Execution Time LP j Execution Time Events Timestamps Message 11 LP k 5 15 Execution Time
107 Global Virtual Time LP i 3 31 Execution Time LP j Execution Time Events Timestamps Message 11 LP k 5 15 Execution Time
108 GVT Operations Once a correct GVT value is determined we can perform two actions: Fossil Collection: the actual garbage collection of old memory buffers Termination Detection GVT identifies the commitment horizon of the speculative execution
109 How Accurate is Speculative Simulation? Sequential Simulation is perfect for fine-grain inspection of predicates It does not scale Models are getting larger and larger everyday Parallel/Distributed simulation has great performance Fine-grain inspection is not viable Process coordination is required This hampers the achievable speedup
110 How Accurate is Speculative Simulation? Speculative Simulation inserts an additional delay The inspection of a global simulation state is delayed until a portion of the simulation trajectory becomes committed Inspection can be done after a GVT value has been computed


111 The Completion-Shift Problem

112 The Completion-Shift Problem

113 The Completion-Shift Problem

114 Time Warp Fundamentals

115 ROOT-Sim The ROme OpTimisti Simulator A general-purpose speculative simulation kernel based on both state saving and reversibility Targets complete transparency towards the model developer It can transparently deploy and run legacy models

116 ROOT-Sim Internals
117 EXAMPLE SESSION PCS on ROOT-Sim
Chair for Network Architectures and Services Prof. Carle Department of Computer Science TU München. Parallel simulation
 Chair for Network Architectures and Services Prof. Carle Department of Computer Science TU München Parallel simulation Most slides/figures borrowed from Richard Fujimoto Parallel simulation: Summary/Outline
Chair for Network Architectures and Services Prof. Carle Department of Computer Science TU München Parallel simulation Most slides/figures borrowed from Richard Fujimoto Parallel simulation: Summary/Outline
Other Optimistic Mechanisms, Memory Management!
 Other Optimistic Mechanisms, Memory Management! Richard M. Fujimoto! Professor!! Computational Science and Engineering Division! College of Computing! Georgia Institute of Technology! Atlanta, GA 30332-0765,
Other Optimistic Mechanisms, Memory Management! Richard M. Fujimoto! Professor!! Computational Science and Engineering Division! College of Computing! Georgia Institute of Technology! Atlanta, GA 30332-0765,
Distributed Simulation of Large Computer Systems
 Distributed Simulation of Large Computer Systems Moreno Marzolla Univ. di Venezia Ca Foscari Dept. of Computer Science and INFN Padova Email: marzolla@dsi.unive.it Web: www.dsi.unive.it/ marzolla Moreno
Distributed Simulation of Large Computer Systems Moreno Marzolla Univ. di Venezia Ca Foscari Dept. of Computer Science and INFN Padova Email: marzolla@dsi.unive.it Web: www.dsi.unive.it/ marzolla Moreno
Computational Methods. Randomness and Monte Carlo Methods
 Computational Methods Randomness and Monte Carlo Methods Manfred Huber 2010 1 Randomness and Monte Carlo Methods Introducing randomness in an algorithm can lead to improved efficiencies Random sampling
Computational Methods Randomness and Monte Carlo Methods Manfred Huber 2010 1 Randomness and Monte Carlo Methods Introducing randomness in an algorithm can lead to improved efficiencies Random sampling
Parallel and Distributed VHDL Simulation
 Parallel and Distributed VHDL Simulation Dragos Lungeanu Deptartment of Computer Science University of Iowa C.J. chard Shi Department of Electrical Engineering University of Washington Abstract This paper
Parallel and Distributed VHDL Simulation Dragos Lungeanu Deptartment of Computer Science University of Iowa C.J. chard Shi Department of Electrical Engineering University of Washington Abstract This paper
You ve already read basics of simulation now I will be taking up method of simulation, that is Random Number Generation
 Unit 5 SIMULATION THEORY Lesson 39 Learning objective: To learn random number generation. Methods of simulation. Monte Carlo method of simulation You ve already read basics of simulation now I will be
Unit 5 SIMULATION THEORY Lesson 39 Learning objective: To learn random number generation. Methods of simulation. Monte Carlo method of simulation You ve already read basics of simulation now I will be
Numerical approach estimate
 Simulation Nature of simulation Numericalapproachfor investigating models of systems. Data are gathered to estimatethe true characteristics of the model. Garbage in garbage out! One of the techniques of
Simulation Nature of simulation Numericalapproachfor investigating models of systems. Data are gathered to estimatethe true characteristics of the model. Garbage in garbage out! One of the techniques of
Combinatorial Search; Monte Carlo Methods
 Combinatorial Search; Monte Carlo Methods Parallel and Distributed Computing Department of Computer Science and Engineering (DEI) Instituto Superior Técnico May 02, 2016 CPD (DEI / IST) Parallel and Distributed
Combinatorial Search; Monte Carlo Methods Parallel and Distributed Computing Department of Computer Science and Engineering (DEI) Instituto Superior Técnico May 02, 2016 CPD (DEI / IST) Parallel and Distributed
Rollback Overhead Reduction Methods for Time Warp Distributed Simulation
 Rollback Overhead Reduction Methods for Time Warp Distributed Simulation M.S. Balsamo and C. Manconi* Dipartimento di Matematica e Informatica, University of Udine Vial delle Scienze 108, Udine, Italy,
Rollback Overhead Reduction Methods for Time Warp Distributed Simulation M.S. Balsamo and C. Manconi* Dipartimento di Matematica e Informatica, University of Udine Vial delle Scienze 108, Udine, Italy,
An Empirical Performance Study of Connection Oriented Time Warp Parallel Simulation
 230 The International Arab Journal of Information Technology, Vol. 6, No. 3, July 2009 An Empirical Performance Study of Connection Oriented Time Warp Parallel Simulation Ali Al-Humaimidi and Hussam Ramadan
230 The International Arab Journal of Information Technology, Vol. 6, No. 3, July 2009 An Empirical Performance Study of Connection Oriented Time Warp Parallel Simulation Ali Al-Humaimidi and Hussam Ramadan
CPU Scheduling. Daniel Mosse. (Most slides are from Sherif Khattab and Silberschatz, Galvin and Gagne 2013)
") CPU Scheduling Daniel Mosse (Most slides are from Sherif Khattab and Silberschatz, Galvin and Gagne 2013) Basic Concepts Maximum CPU utilization obtained with multiprogramming CPU I/O Burst Cycle Process
CPU Scheduling Daniel Mosse (Most slides are from Sherif Khattab and Silberschatz, Galvin and Gagne 2013) Basic Concepts Maximum CPU utilization obtained with multiprogramming CPU I/O Burst Cycle Process
Optimistic Parallel Simulation of TCP/IP over ATM networks
 Optimistic Parallel Simulation of TCP/IP over ATM networks M.S. Oral Examination November 1, 2000 Ming Chong mchang@ittc.ukans.edu 1 Introduction parallel simulation ProTEuS Agenda Georgia Tech. Time Warp
Optimistic Parallel Simulation of TCP/IP over ATM networks M.S. Oral Examination November 1, 2000 Ming Chong mchang@ittc.ukans.edu 1 Introduction parallel simulation ProTEuS Agenda Georgia Tech. Time Warp
PARALLEL QUEUING NETWORK SIMULATION WITH LOOKBACK- BASED PROTOCOLS
 PARALLEL QUEUING NETWORK SIMULATION WITH LOOKBACK- BASED PROTOCOLS Gilbert G. Chen and Boleslaw K. Szymanski Department of Computer Science, Rensselaer Polytechnic Institute 110 Eighth Street, Troy, NY
PARALLEL QUEUING NETWORK SIMULATION WITH LOOKBACK- BASED PROTOCOLS Gilbert G. Chen and Boleslaw K. Szymanski Department of Computer Science, Rensselaer Polytechnic Institute 110 Eighth Street, Troy, NY
Monte Carlo Methods; Combinatorial Search
 Monte Carlo Methods; Combinatorial Search Parallel and Distributed Computing Department of Computer Science and Engineering (DEI) Instituto Superior Técnico November 22, 2012 CPD (DEI / IST) Parallel and
Monte Carlo Methods; Combinatorial Search Parallel and Distributed Computing Department of Computer Science and Engineering (DEI) Instituto Superior Técnico November 22, 2012 CPD (DEI / IST) Parallel and
MULTI-DIMENSIONAL MONTE CARLO INTEGRATION
 CS580: Computer Graphics KAIST School of Computing Chapter 3 MULTI-DIMENSIONAL MONTE CARLO INTEGRATION 2 1 Monte Carlo Integration This describes a simple technique for the numerical evaluation of integrals
CS580: Computer Graphics KAIST School of Computing Chapter 3 MULTI-DIMENSIONAL MONTE CARLO INTEGRATION 2 1 Monte Carlo Integration This describes a simple technique for the numerical evaluation of integrals
Transparently Mixing Undo Logs and Software Reversibility for State Recovery in Optimistic PDES
 Transparently Mixing Undo Logs and Software Reversibility for State Recovery in Optimistic PDES Davide Cingolani, Alessandro Pellegrini, Francesco Quaglia DIAG Sapienza, University of Rome Via Ariosto
Transparently Mixing Undo Logs and Software Reversibility for State Recovery in Optimistic PDES Davide Cingolani, Alessandro Pellegrini, Francesco Quaglia DIAG Sapienza, University of Rome Via Ariosto
Heckaton. SQL Server's Memory Optimized OLTP Engine
 Heckaton SQL Server's Memory Optimized OLTP Engine Agenda Introduction to Hekaton Design Consideration High Level Architecture Storage and Indexing Query Processing Transaction Management Transaction Durability
Heckaton SQL Server's Memory Optimized OLTP Engine Agenda Introduction to Hekaton Design Consideration High Level Architecture Storage and Indexing Query Processing Transaction Management Transaction Durability
CSE380 - Operating Systems. Communicating with Devices
 CSE380 - Operating Systems Notes for Lecture 15-11/4/04 Matt Blaze (some examples by Insup Lee) Communicating with Devices Modern architectures support convenient communication with devices memory mapped
CSE380 - Operating Systems Notes for Lecture 15-11/4/04 Matt Blaze (some examples by Insup Lee) Communicating with Devices Modern architectures support convenient communication with devices memory mapped
Parallel Discrete Event Simulation
 Parallel Discrete Event Simulation Dr.N.Sairam & Dr.R.Seethalakshmi School of Computing, SASTRA Univeristy, Thanjavur-613401. Joint Initiative of IITs and IISc Funded by MHRD Page 1 of 8 Contents 1. Parallel
Parallel Discrete Event Simulation Dr.N.Sairam & Dr.R.Seethalakshmi School of Computing, SASTRA Univeristy, Thanjavur-613401. Joint Initiative of IITs and IISc Funded by MHRD Page 1 of 8 Contents 1. Parallel
Discrete Event Simulation & VHDL. Prof. K. J. Hintz Dept. of Electrical and Computer Engineering George Mason University
 Discrete Event Simulation & VHDL Prof. K. J. Hintz Dept. of Electrical and Computer Engineering George Mason University Discrete Event Simulation Material from VHDL Programming with Advanced Topics by
Discrete Event Simulation & VHDL Prof. K. J. Hintz Dept. of Electrical and Computer Engineering George Mason University Discrete Event Simulation Material from VHDL Programming with Advanced Topics by
Solving something like this
 Waves! Solving something like this The Wave Equation (1-D) = (n-d) = The Wave Equation,, =,, (,, ) (,, ) ( ) = (,, ) (,, ) ( ), =2,, + (, 2, +, ) Boundary Conditions Examples: Manual motion at an end u(0,
Waves! Solving something like this The Wave Equation (1-D) = (n-d) = The Wave Equation,, =,, (,, ) (,, ) ( ) = (,, ) (,, ) ( ), =2,, + (, 2, +, ) Boundary Conditions Examples: Manual motion at an end u(0,
CSE 380 Computer Operating Systems
 CSE 380 Computer Operating Systems Instructor: Insup Lee University of Pennsylvania Fall 2003 Lecture Note on Disk I/O 1 I/O Devices Storage devices Floppy, Magnetic disk, Magnetic tape, CD-ROM, DVD User
CSE 380 Computer Operating Systems Instructor: Insup Lee University of Pennsylvania Fall 2003 Lecture Note on Disk I/O 1 I/O Devices Storage devices Floppy, Magnetic disk, Magnetic tape, CD-ROM, DVD User
Monte Carlo Integration and Random Numbers
 Monte Carlo Integration and Random Numbers Higher dimensional integration u Simpson rule with M evaluations in u one dimension the error is order M -4! u d dimensions the error is order M -4/d u In general
Monte Carlo Integration and Random Numbers Higher dimensional integration u Simpson rule with M evaluations in u one dimension the error is order M -4! u d dimensions the error is order M -4/d u In general
Transparent Speculative Parallelization of Discrete Event Simulation Applications Using Global Variables
 Noname manuscript No. (will be inserted by the editor) Transparent Speculative Parallelization of Discrete Event Simulation Applications Using Global Variables Alessandro Pellegrini Sebastiano Peluso Francesco
Noname manuscript No. (will be inserted by the editor) Transparent Speculative Parallelization of Discrete Event Simulation Applications Using Global Variables Alessandro Pellegrini Sebastiano Peluso Francesco
OS Extensibility: SPIN and Exokernels. Robert Grimm New York University
 OS Extensibility: SPIN and Exokernels Robert Grimm New York University The Three Questions What is the problem? What is new or different? What are the contributions and limitations? OS Abstraction Barrier
OS Extensibility: SPIN and Exokernels Robert Grimm New York University The Three Questions What is the problem? What is new or different? What are the contributions and limitations? OS Abstraction Barrier
Chapter Four: Loops. Slides by Evan Gallagher. C++ for Everyone by Cay Horstmann Copyright 2012 by John Wiley & Sons. All rights reserved
 Chapter Four: Loops Slides by Evan Gallagher The Three Loops in C++ C++ has these three looping statements: while for do The while Loop while (condition) { statements } The condition is some kind of test
Chapter Four: Loops Slides by Evan Gallagher The Three Loops in C++ C++ has these three looping statements: while for do The while Loop while (condition) { statements } The condition is some kind of test
Chapter 4: Threads. Chapter 4: Threads. Overview Multicore Programming Multithreading Models Thread Libraries Implicit Threading Threading Issues
 Chapter 4: Threads Silberschatz, Galvin and Gagne 2013 Chapter 4: Threads Overview Multicore Programming Multithreading Models Thread Libraries Implicit Threading Threading Issues 4.2 Silberschatz, Galvin
Chapter 4: Threads Silberschatz, Galvin and Gagne 2013 Chapter 4: Threads Overview Multicore Programming Multithreading Models Thread Libraries Implicit Threading Threading Issues 4.2 Silberschatz, Galvin
CHAPTER 5 PROPAGATION DELAY
 98 CHAPTER 5 PROPAGATION DELAY Underwater wireless sensor networks deployed of sensor nodes with sensing, forwarding and processing abilities that operate in underwater. In this environment brought challenges,
98 CHAPTER 5 PROPAGATION DELAY Underwater wireless sensor networks deployed of sensor nodes with sensing, forwarding and processing abilities that operate in underwater. In this environment brought challenges,
Accelerated Library Framework for Hybrid-x86
 Software Development Kit for Multicore Acceleration Version 3.0 Accelerated Library Framework for Hybrid-x86 Programmer s Guide and API Reference Version 1.0 DRAFT SC33-8406-00 Software Development Kit
Software Development Kit for Multicore Acceleration Version 3.0 Accelerated Library Framework for Hybrid-x86 Programmer s Guide and API Reference Version 1.0 DRAFT SC33-8406-00 Software Development Kit
Curriculum 2013 Knowledge Units Pertaining to PDC
 Curriculum 2013 Knowledge Units Pertaining to C KA KU Tier Level NumC Learning Outcome Assembly level machine Describe how an instruction is executed in a classical von Neumann machine, with organization
Curriculum 2013 Knowledge Units Pertaining to C KA KU Tier Level NumC Learning Outcome Assembly level machine Describe how an instruction is executed in a classical von Neumann machine, with organization
Classification of Optimization Problems and the Place of Calculus of Variations in it
 Lecture 1 Classification of Optimization Problems and the Place of Calculus of Variations in it ME256 Indian Institute of Science G. K. Ananthasuresh Professor, Mechanical Engineering, Indian Institute
Lecture 1 Classification of Optimization Problems and the Place of Calculus of Variations in it ME256 Indian Institute of Science G. K. Ananthasuresh Professor, Mechanical Engineering, Indian Institute
Computing Global Virtual Time!
 Computing Global Virtual Time Issues and Some Solutions Richard M. Fujimoto Professor Computational Science and Engineering Division College of Computing Georgia Institute of Technology Atlanta, GA 30332-0765,
Computing Global Virtual Time Issues and Some Solutions Richard M. Fujimoto Professor Computational Science and Engineering Division College of Computing Georgia Institute of Technology Atlanta, GA 30332-0765,
Tutorial Parallel & Distributed Simulation Systems and the High Level Architecture
 Tutorial Parallel & Distributed Simulation Systems and the High Level Architecture Kalyan Perumalla, Ph.D. Research Faculty Member College of Computing & MSREC Georgia Institute of Technology Atlanta,
Tutorial Parallel & Distributed Simulation Systems and the High Level Architecture Kalyan Perumalla, Ph.D. Research Faculty Member College of Computing & MSREC Georgia Institute of Technology Atlanta,
Efficient Optimistic Parallel Simulations using Reverse Computation
 Efficient Optimistic Parallel Simulations using Reverse Computation Christopher D. Carothers Department of Computer Science Rensselaer Polytechnic Institute 110 8th Street Troy, New York U.S.A. 12180-3590
Efficient Optimistic Parallel Simulations using Reverse Computation Christopher D. Carothers Department of Computer Science Rensselaer Polytechnic Institute 110 8th Street Troy, New York U.S.A. 12180-3590
I/O, Disks, and RAID Yi Shi Fall Xi an Jiaotong University
 I/O, Disks, and RAID Yi Shi Fall 2017 Xi an Jiaotong University Goals for Today Disks How does a computer system permanently store data? RAID How to make storage both efficient and reliable? 2 What does
I/O, Disks, and RAID Yi Shi Fall 2017 Xi an Jiaotong University Goals for Today Disks How does a computer system permanently store data? RAID How to make storage both efficient and reliable? 2 What does
Cs703 Current Midterm papers solved by Naina_Mailk. Q: 1 what are the Characteristics of Real-Time Operating system?
 Cs703 Current Midterm papers solved by Naina_Mailk Q: 1 what are the Characteristics of Real-Time Operating system? Characteristics of Real-Time Operating Systems Deterministic Operations are performed
Cs703 Current Midterm papers solved by Naina_Mailk Q: 1 what are the Characteristics of Real-Time Operating system? Characteristics of Real-Time Operating Systems Deterministic Operations are performed
General Objectives: To understand the process management in operating system. Specific Objectives: At the end of the unit you should be able to:
 F2007/Unit5/1 UNIT 5 OBJECTIVES General Objectives: To understand the process management in operating system Specific Objectives: At the end of the unit you should be able to: define program, process and
F2007/Unit5/1 UNIT 5 OBJECTIVES General Objectives: To understand the process management in operating system Specific Objectives: At the end of the unit you should be able to: define program, process and
Parallel Computing. Slides credit: M. Quinn book (chapter 3 slides), A Grama book (chapter 3 slides)
, A Grama book (chapter 3 slides)") Parallel Computing 2012 Slides credit: M. Quinn book (chapter 3 slides), A Grama book (chapter 3 slides) Parallel Algorithm Design Outline Computational Model Design Methodology Partitioning Communication
Parallel Computing 2012 Slides credit: M. Quinn book (chapter 3 slides), A Grama book (chapter 3 slides) Parallel Algorithm Design Outline Computational Model Design Methodology Partitioning Communication
CS 179: GPU Computing. Lecture 16: Simulations and Randomness
 CS 179: GPU Computing Lecture 16: Simulations and Randomness Simulations South Bay Simulations, http://www.panix.com/~brosen/graphics/iacc.400.jpg Exa Corporation, http://www.exa.com/images/f16.png Flysurfer
CS 179: GPU Computing Lecture 16: Simulations and Randomness Simulations South Bay Simulations, http://www.panix.com/~brosen/graphics/iacc.400.jpg Exa Corporation, http://www.exa.com/images/f16.png Flysurfer
FAULT TOLERANT SYSTEMS
 FAULT TOLERANT SYSTEMS http://www.ecs.umass.edu/ece/koren/faulttolerantsystems Part 16 - Checkpointing I Chapter 6 - Checkpointing Part.16.1 Failure During Program Execution Computers today are much faster,
FAULT TOLERANT SYSTEMS http://www.ecs.umass.edu/ece/koren/faulttolerantsystems Part 16 - Checkpointing I Chapter 6 - Checkpointing Part.16.1 Failure During Program Execution Computers today are much faster,
Monte Carlo Techniques. Professor Stephen Sekula Guest Lecture PHY 4321/7305 Sep. 3, 2014
 Monte Carlo Techniques Professor Stephen Sekula Guest Lecture PHY 431/7305 Sep. 3, 014 What are Monte Carlo Techniques? Computational algorithms that rely on repeated random sampling in order to obtain
Monte Carlo Techniques Professor Stephen Sekula Guest Lecture PHY 431/7305 Sep. 3, 014 What are Monte Carlo Techniques? Computational algorithms that rely on repeated random sampling in order to obtain
Processes and Threads Implementation
 Processes and Threads Implementation 1 Learning Outcomes An understanding of the typical implementation strategies of processes and threads Including an appreciation of the trade-offs between the implementation
Processes and Threads Implementation 1 Learning Outcomes An understanding of the typical implementation strategies of processes and threads Including an appreciation of the trade-offs between the implementation
Chapter Four: Loops II
 Chapter Four: Loops II Slides by Evan Gallagher & Nikolay Kirov Chapter Goals To understand nested loops To implement programs that read and process data sets To use a computer for simulations Processing
Chapter Four: Loops II Slides by Evan Gallagher & Nikolay Kirov Chapter Goals To understand nested loops To implement programs that read and process data sets To use a computer for simulations Processing
Ext3/4 file systems. Don Porter CSE 506
 Ext3/4 file systems Don Porter CSE 506 Logical Diagram Binary Formats Memory Allocators System Calls Threads User Today s Lecture Kernel RCU File System Networking Sync Memory Management Device Drivers
Ext3/4 file systems Don Porter CSE 506 Logical Diagram Binary Formats Memory Allocators System Calls Threads User Today s Lecture Kernel RCU File System Networking Sync Memory Management Device Drivers
GPGPU LAB. Case study: Finite-Difference Time- Domain Method on CUDA
 GPGPU LAB Case study: Finite-Difference Time- Domain Method on CUDA Ana Balevic IPVS 1 Finite-Difference Time-Domain Method Numerical computation of solutions to partial differential equations Explicit
GPGPU LAB Case study: Finite-Difference Time- Domain Method on CUDA Ana Balevic IPVS 1 Finite-Difference Time-Domain Method Numerical computation of solutions to partial differential equations Explicit
Overview of the Simulation Process. CS1538: Introduction to Simulations
 Overview of the Simulation Process CS1538: Introduction to Simulations Simulation Fundamentals A computer simulation is a computer program that models the behavior of a physical system over time. Program
Overview of the Simulation Process CS1538: Introduction to Simulations Simulation Fundamentals A computer simulation is a computer program that models the behavior of a physical system over time. Program
Multiprocessor and Real-Time Scheduling. Chapter 10
 Multiprocessor and Real-Time Scheduling Chapter 10 1 Roadmap Multiprocessor Scheduling Real-Time Scheduling Linux Scheduling Unix SVR4 Scheduling Windows Scheduling Classifications of Multiprocessor Systems
Multiprocessor and Real-Time Scheduling Chapter 10 1 Roadmap Multiprocessor Scheduling Real-Time Scheduling Linux Scheduling Unix SVR4 Scheduling Windows Scheduling Classifications of Multiprocessor Systems
Chapter 5 - Input / Output
 Chapter 5 - Input / Output Luis Tarrataca luis.tarrataca@gmail.com CEFET-RJ L. Tarrataca Chapter 5 - Input / Output 1 / 90 1 Motivation 2 Principle of I/O Hardware I/O Devices Device Controllers Memory-Mapped
Chapter 5 - Input / Output Luis Tarrataca luis.tarrataca@gmail.com CEFET-RJ L. Tarrataca Chapter 5 - Input / Output 1 / 90 1 Motivation 2 Principle of I/O Hardware I/O Devices Device Controllers Memory-Mapped
Main Points of the Computer Organization and System Software Module
 Main Points of the Computer Organization and System Software Module You can find below the topics we have covered during the COSS module. Reading the relevant parts of the textbooks is essential for a
Main Points of the Computer Organization and System Software Module You can find below the topics we have covered during the COSS module. Reading the relevant parts of the textbooks is essential for a
Reproducibility in Stochastic Simulation
 Reproducibility in Stochastic Simulation Prof. Michael Mascagni Department of Computer Science Department of Mathematics Department of Scientific Computing Graduate Program in Molecular Biophysics Florida
Reproducibility in Stochastic Simulation Prof. Michael Mascagni Department of Computer Science Department of Mathematics Department of Scientific Computing Graduate Program in Molecular Biophysics Florida
Announcement. Exercise #2 will be out today. Due date is next Monday
 Announcement Exercise #2 will be out today Due date is next Monday Major OS Developments 2 Evolution of Operating Systems Generations include: Serial Processing Simple Batch Systems Multiprogrammed Batch
Announcement Exercise #2 will be out today Due date is next Monday Major OS Developments 2 Evolution of Operating Systems Generations include: Serial Processing Simple Batch Systems Multiprogrammed Batch
IMPROVING PERFORMANCE OF PARALLEL SIMULATION KERNEL FOR WIRELESS NETWORK SIMULATIONS
 IMPROVING PERFORMANCE OF PARALLEL SIMULATION KERNEL FOR WIRELESS NETWORK SIMULATIONS M. Thoppian, S. Venkatesan, H. Vu, R. Prakash, N. Mittal Department of Computer Science, The University of Texas at
IMPROVING PERFORMANCE OF PARALLEL SIMULATION KERNEL FOR WIRELESS NETWORK SIMULATIONS M. Thoppian, S. Venkatesan, H. Vu, R. Prakash, N. Mittal Department of Computer Science, The University of Texas at
Operating Systems Overview. Chapter 2
 1 Operating Systems Overview 2 Chapter 2 3 An operating System: The interface between hardware and the user From the user s perspective: OS is a program that controls the execution of application programs
1 Operating Systems Overview 2 Chapter 2 3 An operating System: The interface between hardware and the user From the user s perspective: OS is a program that controls the execution of application programs
An Approach for Federating Parallel Simulators
 An Approach for Federating Parallel Simulators Steve L. Ferenci Kalyan S. Perumalla Richard M. Fujimoto College Of Computing Georgia Institute of Technology Atlanta, GA 30332-0280 {ferenci,kalyan,fujimoto}@cc.gatech.edu
An Approach for Federating Parallel Simulators Steve L. Ferenci Kalyan S. Perumalla Richard M. Fujimoto College Of Computing Georgia Institute of Technology Atlanta, GA 30332-0280 {ferenci,kalyan,fujimoto}@cc.gatech.edu
Analysing Probabilistically Constrained Optimism
 Analysing Probabilistically Constrained Optimism Michael Lees and Brian Logan School of Computer Science & IT University of Nottingham UK {mhl,bsl}@cs.nott.ac.uk Dan Chen, Ton Oguara and Georgios Theodoropoulos
Analysing Probabilistically Constrained Optimism Michael Lees and Brian Logan School of Computer Science & IT University of Nottingham UK {mhl,bsl}@cs.nott.ac.uk Dan Chen, Ton Oguara and Georgios Theodoropoulos
Design of Parallel Algorithms. Models of Parallel Computation
 + Design of Parallel Algorithms Models of Parallel Computation + Chapter Overview: Algorithms and Concurrency n Introduction to Parallel Algorithms n Tasks and Decomposition n Processes and Mapping n Processes
+ Design of Parallel Algorithms Models of Parallel Computation + Chapter Overview: Algorithms and Concurrency n Introduction to Parallel Algorithms n Tasks and Decomposition n Processes and Mapping n Processes
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 13 Random Numbers and Stochastic Simulation Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright
Scientific Computing: An Introductory Survey Chapter 13 Random Numbers and Stochastic Simulation Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright
Probabilistic (Randomized) algorithms
 algorithms") Probabilistic (Randomized) algorithms Idea: Build algorithms using a random element so as gain improved performance. For some cases, improved performance is very dramatic, moving from intractable to tractable.
Probabilistic (Randomized) algorithms Idea: Build algorithms using a random element so as gain improved performance. For some cases, improved performance is very dramatic, moving from intractable to tractable.
In examining performance Interested in several things Exact times if computable Bounded times if exact not computable Can be measured
 System Performance Analysis Introduction Performance Means many things to many people Important in any design Critical in real time systems 1 ns can mean the difference between system Doing job expected
System Performance Analysis Introduction Performance Means many things to many people Important in any design Critical in real time systems 1 ns can mean the difference between system Doing job expected
THREADS AND CONCURRENCY
 THREADS AND CONCURRENCY Lecture 22 CS2110 Spring 2013 Graphs summary 2 Dijkstra: given a vertex v, finds shortest path from v to x for each vertex x in the graph Key idea: maintain a 5-part invariant on
THREADS AND CONCURRENCY Lecture 22 CS2110 Spring 2013 Graphs summary 2 Dijkstra: given a vertex v, finds shortest path from v to x for each vertex x in the graph Key idea: maintain a 5-part invariant on
SIMULATION SYSTEMS PART 1: RANDOM NUMBER GENERATION. Prof. Yasser Mostafa Kadah
 1 SIMULATION SYSTEMS PART 1: RANDOM NUMBER GENERATION Prof. Yasser Mostafa Kadah Introduction to Simulation 2 Simulating the process can be useful as a validation of a model or a comparison of two different
1 SIMULATION SYSTEMS PART 1: RANDOM NUMBER GENERATION Prof. Yasser Mostafa Kadah Introduction to Simulation 2 Simulating the process can be useful as a validation of a model or a comparison of two different
CPSC 531: System Modeling and Simulation. Carey Williamson Department of Computer Science University of Calgary Fall 2017
 CPSC 531: System Modeling and Simulation Carey Williamson Department of Computer Science University of Calgary Fall 2017 Recap: Simulation Model Taxonomy 2 Recap: DES Model Development How to develop a
CPSC 531: System Modeling and Simulation Carey Williamson Department of Computer Science University of Calgary Fall 2017 Recap: Simulation Model Taxonomy 2 Recap: DES Model Development How to develop a
Chapter 3 Processes. Process Concept. Process Concept. Process Concept (Cont.) Process Concept (Cont.) Process Concept (Cont.)
 Process Concept (Cont.) Process Concept (Cont.)") Process Concept Chapter 3 Processes Computers can do several activities at a time Executing user programs, reading from disks writing to a printer, etc. In multiprogramming: CPU switches from program to
Process Concept Chapter 3 Processes Computers can do several activities at a time Executing user programs, reading from disks writing to a printer, etc. In multiprogramming: CPU switches from program to
Fast Automated Estimation of Variance in Discrete Quantitative Stochastic Simulation
 Fast Automated Estimation of Variance in Discrete Quantitative Stochastic Simulation November 2010 Nelson Shaw njd50@uclive.ac.nz Department of Computer Science and Software Engineering University of Canterbury,
Fast Automated Estimation of Variance in Discrete Quantitative Stochastic Simulation November 2010 Nelson Shaw njd50@uclive.ac.nz Department of Computer Science and Software Engineering University of Canterbury,
Operating Systems: Internals and Design Principles. Chapter 2 Operating System Overview Seventh Edition By William Stallings
 Operating Systems: Internals and Design Principles Chapter 2 Operating System Overview Seventh Edition By William Stallings Operating Systems: Internals and Design Principles Operating systems are those
Operating Systems: Internals and Design Principles Chapter 2 Operating System Overview Seventh Edition By William Stallings Operating Systems: Internals and Design Principles Operating systems are those
Asynchronous Events on Linux
 Asynchronous Events on Linux Frederic.Rossi@Ericsson.CA Open System Lab Systems Research June 25, 2002 Ericsson Research Canada Introduction Linux performs well as a general purpose OS but doesn t satisfy
Asynchronous Events on Linux Frederic.Rossi@Ericsson.CA Open System Lab Systems Research June 25, 2002 Ericsson Research Canada Introduction Linux performs well as a general purpose OS but doesn t satisfy
Chapter 3: Process Concept
 Chapter 3: Process Concept Chapter 3: Process Concept Process Concept Process Scheduling Operations on Processes Inter-Process Communication (IPC) Communication in Client-Server Systems Objectives 3.2
Chapter 3: Process Concept Chapter 3: Process Concept Process Concept Process Scheduling Operations on Processes Inter-Process Communication (IPC) Communication in Client-Server Systems Objectives 3.2
Chapter 3: Process Concept
 Chapter 3: Process Concept Chapter 3: Process Concept Process Concept Process Scheduling Operations on Processes Inter-Process Communication (IPC) Communication in Client-Server Systems Objectives 3.2
Chapter 3: Process Concept Chapter 3: Process Concept Process Concept Process Scheduling Operations on Processes Inter-Process Communication (IPC) Communication in Client-Server Systems Objectives 3.2
Performance Evaluation. Recommended reading: Heidelberg and Lavenberg Computer Performance Evaluation IEEETC, C33, 12, Dec. 1984, p.
 Thomas Clark 5/4/09 cs162 lecture notes cs162-aw Performance Evaluation Recommended reading: Heidelberg and Lavenberg Computer Performance Evaluation IEEETC, C33, 12, Dec. 1984, p. 1195 We ve been talking
Thomas Clark 5/4/09 cs162 lecture notes cs162-aw Performance Evaluation Recommended reading: Heidelberg and Lavenberg Computer Performance Evaluation IEEETC, C33, 12, Dec. 1984, p. 1195 We ve been talking
Parallel and Distributed Systems. Programming Models. Why Parallel or Distributed Computing? What is a parallel computer?
 Parallel and Distributed Systems Instructor: Sandhya Dwarkadas Department of Computer Science University of Rochester What is a parallel computer? A collection of processing elements that communicate and
Parallel and Distributed Systems Instructor: Sandhya Dwarkadas Department of Computer Science University of Rochester What is a parallel computer? A collection of processing elements that communicate and
Chapter 11. I/O Management and Disk Scheduling
 Operating System Chapter 11. I/O Management and Disk Scheduling Lynn Choi School of Electrical Engineering Categories of I/O Devices I/O devices can be grouped into 3 categories Human readable devices
Operating System Chapter 11. I/O Management and Disk Scheduling Lynn Choi School of Electrical Engineering Categories of I/O Devices I/O devices can be grouped into 3 categories Human readable devices
Distributed simulation of situated multi-agent systems
 Distributed simulation of situated multi-agent systems Franco Cicirelli, Andrea Giordano, Libero Nigro Laboratorio di Ingegneria del Software http://www.lis.deis.unical.it Dipartimento di Elettronica Informatica
Distributed simulation of situated multi-agent systems Franco Cicirelli, Andrea Giordano, Libero Nigro Laboratorio di Ingegneria del Software http://www.lis.deis.unical.it Dipartimento di Elettronica Informatica
Course: Operating Systems Instructor: M Umair. M Umair
 Course: Operating Systems Instructor: M Umair Process The Process A process is a program in execution. A program is a passive entity, such as a file containing a list of instructions stored on disk (often
Course: Operating Systems Instructor: M Umair Process The Process A process is a program in execution. A program is a passive entity, such as a file containing a list of instructions stored on disk (often
Parallelism. CS6787 Lecture 8 Fall 2017
 Parallelism CS6787 Lecture 8 Fall 2017 So far We ve been talking about algorithms We ve been talking about ways to optimize their parameters But we haven t talked about the underlying hardware How does
Parallelism CS6787 Lecture 8 Fall 2017 So far We ve been talking about algorithms We ve been talking about ways to optimize their parameters But we haven t talked about the underlying hardware How does
Network Load Balancing Methods: Experimental Comparisons and Improvement
 Network Load Balancing Methods: Experimental Comparisons and Improvement Abstract Load balancing algorithms play critical roles in systems where the workload has to be distributed across multiple resources,
Network Load Balancing Methods: Experimental Comparisons and Improvement Abstract Load balancing algorithms play critical roles in systems where the workload has to be distributed across multiple resources,
PARALLEL SIMULATION OF SCALE-FREE NETWORKS
 PARALLEL SIMULATION OF SCALE-FREE NETWORKS A Dissertation Presented to The Academic Faculty by Vy Thuy Nguyen In Partial Fulfillment of the Requirements for the Degree Master of Science in the School of
PARALLEL SIMULATION OF SCALE-FREE NETWORKS A Dissertation Presented to The Academic Faculty by Vy Thuy Nguyen In Partial Fulfillment of the Requirements for the Degree Master of Science in the School of
Sapienza University of Rome
 Sapienza University of Rome Ph.D. program in Computer Engineering XXV Cycle - 2012/3 Design of Software Support Structures for High Performance Optimistic Simulations with Special Focus on Multi-Core Hosting
Sapienza University of Rome Ph.D. program in Computer Engineering XXV Cycle - 2012/3 Design of Software Support Structures for High Performance Optimistic Simulations with Special Focus on Multi-Core Hosting
Chapter 4: Multithreaded Programming
 Chapter 4: Multithreaded Programming Silberschatz, Galvin and Gagne 2013 Chapter 4: Multithreaded Programming Overview Multicore Programming Multithreading Models Thread Libraries Implicit Threading Threading
Chapter 4: Multithreaded Programming Silberschatz, Galvin and Gagne 2013 Chapter 4: Multithreaded Programming Overview Multicore Programming Multithreading Models Thread Libraries Implicit Threading Threading
Michel Raynal. Distributed Algorithms for Message-Passing Systems
 Michel Raynal Distributed Algorithms for Message-Passing Systems Contents Part I Distributed Graph Algorithms 1 Basic Definitions and Network Traversal Algorithms... 3 1.1 DistributedAlgorithms... 3 1.1.1
Michel Raynal Distributed Algorithms for Message-Passing Systems Contents Part I Distributed Graph Algorithms 1 Basic Definitions and Network Traversal Algorithms... 3 1.1 DistributedAlgorithms... 3 1.1.1
Physics 736. Experimental Methods in Nuclear-, Particle-, and Astrophysics. - Statistics and Error Analysis -
 Physics 736 Experimental Methods in Nuclear-, Particle-, and Astrophysics - Statistics and Error Analysis - Karsten Heeger heeger@wisc.edu Feldman&Cousin what are the issues they deal with? what processes
Physics 736 Experimental Methods in Nuclear-, Particle-, and Astrophysics - Statistics and Error Analysis - Karsten Heeger heeger@wisc.edu Feldman&Cousin what are the issues they deal with? what processes
Virtual Memory Primitives for User Programs
 Virtual Memory Primitives for User Programs Andrew W. Appel & Kai Li Department of Computer Science Princeton University Presented By: Anirban Sinha (aka Ani), anirbans@cs.ubc.ca 1 About the Authors Andrew
Virtual Memory Primitives for User Programs Andrew W. Appel & Kai Li Department of Computer Science Princeton University Presented By: Anirban Sinha (aka Ani), anirbans@cs.ubc.ca 1 About the Authors Andrew
Three Models. 1. Time Order 2. Distributed Algorithms 3. Nature of Distributed Systems1. DEPT. OF Comp Sc. and Engg., IIT Delhi
 DEPT. OF Comp Sc. and Engg., IIT Delhi Three Models 1. CSV888 - Distributed Systems 1. Time Order 2. Distributed Algorithms 3. Nature of Distributed Systems1 Index - Models to study [2] 1. LAN based systems
DEPT. OF Comp Sc. and Engg., IIT Delhi Three Models 1. CSV888 - Distributed Systems 1. Time Order 2. Distributed Algorithms 3. Nature of Distributed Systems1 Index - Models to study [2] 1. LAN based systems
1: Introduction to Object (1)
") 1: Introduction to Object (1) 김동원 2003.01.20 Overview (1) The progress of abstraction Smalltalk Class & Object Interface The hidden implementation Reusing the implementation Inheritance: Reusing the interface
1: Introduction to Object (1) 김동원 2003.01.20 Overview (1) The progress of abstraction Smalltalk Class & Object Interface The hidden implementation Reusing the implementation Inheritance: Reusing the interface
Chapter 3: Processes. Operating System Concepts Essentials 2 nd Edition
 Chapter 3: Processes Silberschatz, Galvin and Gagne 2013 Chapter 3: Processes Process Concept Process Scheduling Operations on Processes Interprocess Communication Examples of IPC Systems Communication
Chapter 3: Processes Silberschatz, Galvin and Gagne 2013 Chapter 3: Processes Process Concept Process Scheduling Operations on Processes Interprocess Communication Examples of IPC Systems Communication
Chapter 3: Process Concept
 Chapter 3: Process Concept Silberschatz, Galvin and Gagne 2013! Chapter 3: Process Concept Process Concept" Process Scheduling" Operations on Processes" Inter-Process Communication (IPC)" Communication
Chapter 3: Process Concept Silberschatz, Galvin and Gagne 2013! Chapter 3: Process Concept Process Concept" Process Scheduling" Operations on Processes" Inter-Process Communication (IPC)" Communication
Process- Concept &Process Scheduling OPERATING SYSTEMS
 OPERATING SYSTEMS Prescribed Text Book Operating System Principles, Seventh Edition By Abraham Silberschatz, Peter Baer Galvin and Greg Gagne PROCESS MANAGEMENT Current day computer systems allow multiple
OPERATING SYSTEMS Prescribed Text Book Operating System Principles, Seventh Edition By Abraham Silberschatz, Peter Baer Galvin and Greg Gagne PROCESS MANAGEMENT Current day computer systems allow multiple
Self Stabilization. CS553 Distributed Algorithms Prof. Ajay Kshemkalyani. by Islam Ismailov & Mohamed M. Ali
 Self Stabilization CS553 Distributed Algorithms Prof. Ajay Kshemkalyani by Islam Ismailov & Mohamed M. Ali Introduction There is a possibility for a distributed system to go into an illegitimate state,
Self Stabilization CS553 Distributed Algorithms Prof. Ajay Kshemkalyani by Islam Ismailov & Mohamed M. Ali Introduction There is a possibility for a distributed system to go into an illegitimate state,
Parallel and High Performance Computing CSE 745
 Parallel and High Performance Computing CSE 745 1 Outline Introduction to HPC computing Overview Parallel Computer Memory Architectures Parallel Programming Models Designing Parallel Programs Parallel
Parallel and High Performance Computing CSE 745 1 Outline Introduction to HPC computing Overview Parallel Computer Memory Architectures Parallel Programming Models Designing Parallel Programs Parallel
Queuing Networks. Renato Lo Cigno. Simulation and Performance Evaluation Queuing Networks - Renato Lo Cigno 1
 Queuing Networks Renato Lo Cigno Simulation and Performance Evaluation 2014-15 Queuing Networks - Renato Lo Cigno 1 Moving between Queues Queuing Networks - Renato Lo Cigno - Interconnecting Queues 2 Moving
Queuing Networks Renato Lo Cigno Simulation and Performance Evaluation 2014-15 Queuing Networks - Renato Lo Cigno 1 Moving between Queues Queuing Networks - Renato Lo Cigno - Interconnecting Queues 2 Moving
Kernel Korner AEM: A Scalable and Native Event Mechanism for Linux
 Kernel Korner AEM: A Scalable and Native Event Mechanism for Linux Give your application the ability to register callbacks with the kernel. by Frédéric Rossi In a previous article [ An Event Mechanism
Kernel Korner AEM: A Scalable and Native Event Mechanism for Linux Give your application the ability to register callbacks with the kernel. by Frédéric Rossi In a previous article [ An Event Mechanism
UNIT 9A Randomness in Computation: Random Number Generators
 UNIT 9A Randomness in Computation: Random Number Generators 1 Last Unit Computer organization: what s under the hood 3 This Unit Random number generation Using pseudorandom numbers 4 Overview The concept
UNIT 9A Randomness in Computation: Random Number Generators 1 Last Unit Computer organization: what s under the hood 3 This Unit Random number generation Using pseudorandom numbers 4 Overview The concept
Process Description and Control
 Process Description and Control B.Ramamurthy 1/28/02 B.Ramamurthy 1 Introduction The fundamental task of any operating system is process management. OS must allocate resources to processes, enable sharing
Process Description and Control B.Ramamurthy 1/28/02 B.Ramamurthy 1 Introduction The fundamental task of any operating system is process management. OS must allocate resources to processes, enable sharing
PERFORMANCE ANALYSIS AND OPTIMIZATION OF SKIP LISTS FOR MODERN MULTI-CORE ARCHITECTURES
 PERFORMANCE ANALYSIS AND OPTIMIZATION OF SKIP LISTS FOR MODERN MULTI-CORE ARCHITECTURES Anish Athalye and Patrick Long Mentors: Austin Clements and Stephen Tu 3 rd annual MIT PRIMES Conference Sequential
PERFORMANCE ANALYSIS AND OPTIMIZATION OF SKIP LISTS FOR MODERN MULTI-CORE ARCHITECTURES Anish Athalye and Patrick Long Mentors: Austin Clements and Stephen Tu 3 rd annual MIT PRIMES Conference Sequential
CPU Scheduling: Objectives
 CPU Scheduling: Objectives CPU scheduling, the basis for multiprogrammed operating systems CPU-scheduling algorithms Evaluation criteria for selecting a CPU-scheduling algorithm for a particular system
CPU Scheduling: Objectives CPU scheduling, the basis for multiprogrammed operating systems CPU-scheduling algorithms Evaluation criteria for selecting a CPU-scheduling algorithm for a particular system
Summary of Coverage Problems in Wireless Ad-hoc Sensor Networks
 Summary of Coverage Problems in Wireless Ad-hoc Sensor Networks Laura Kneckt 21th of March, 2005 Abstract This paper presents a brief summary of the article about Coverage Problems in Wireless Ad-hoc Sensor
Summary of Coverage Problems in Wireless Ad-hoc Sensor Networks Laura Kneckt 21th of March, 2005 Abstract This paper presents a brief summary of the article about Coverage Problems in Wireless Ad-hoc Sensor
Design Patterns for Real-Time Computer Music Systems
 Design Patterns for Real-Time Computer Music Systems Roger B. Dannenberg and Ross Bencina 4 September 2005 This document contains a set of design patterns for real time systems, particularly for computer
Design Patterns for Real-Time Computer Music Systems Roger B. Dannenberg and Ross Bencina 4 September 2005 This document contains a set of design patterns for real time systems, particularly for computer
Scalable Algorithmic Techniques Decompositions & Mapping. Alexandre David
 Scalable Algorithmic Techniques Decompositions & Mapping Alexandre David 1.2.05 adavid@cs.aau.dk Introduction Focus on data parallelism, scale with size. Task parallelism limited. Notion of scalability
Scalable Algorithmic Techniques Decompositions & Mapping Alexandre David 1.2.05 adavid@cs.aau.dk Introduction Focus on data parallelism, scale with size. Task parallelism limited. Notion of scalability
ECE519 Advanced Operating Systems
 IT 540 Operating Systems ECE519 Advanced Operating Systems Prof. Dr. Hasan Hüseyin BALIK (10 th Week) (Advanced) Operating Systems 10. Multiprocessor, Multicore and Real-Time Scheduling 10. Outline Multiprocessor
IT 540 Operating Systems ECE519 Advanced Operating Systems Prof. Dr. Hasan Hüseyin BALIK (10 th Week) (Advanced) Operating Systems 10. Multiprocessor, Multicore and Real-Time Scheduling 10. Outline Multiprocessor
Module 1 Lecture Notes 2. Optimization Problem and Model Formulation
 Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
Learning Outcomes. Processes and Threads Implementation. Processes Process s user-level stack and execution state. Threads The Thread Model.
 Processes and Threads Implementation Learning Outcomes An understanding of the typical implementation strategies of processes and threads Including an appreciation of the trade-offs between the implementation
Processes and Threads Implementation Learning Outcomes An understanding of the typical implementation strategies of processes and threads Including an appreciation of the trade-offs between the implementation