Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen?
|
|
|
- Marybeth Dorsey
- 5 years ago
- Views:
Transcription



1 Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI

2 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research. 69 institutes and research units in Germany Research cooperation around the world staff members Budget: more than 2.1 billion Research highlights: MP3 audio codec, H.264, H.265 video codec, LTE mobile communications standard Fraunhofer HHI


3 Fraunhofer Institute for Telecommunications, Heinrich Hertz Institute, HHI 1928 Founding of Heinrich Hertz Institute in Berlin Since 1960s Research on fiber optical transmission Since 1980s Research on digital video coding Since 2003 Member of Fraunhofer-Gesellschaft Since 2009 Branch site in Goslar, Germany Fraunhofer HHI




4 Facts and Figures Last updated: 2015 Fraunhofer HHI

5 Departments Photonic Network and Systems Photonic Components Fiber Optical Sensor Systems Wireless Communications and Networks Vision and Imaging Technologies Video Coding and Analytics Photo: fotolia.com/seanpavonephoto Edit: Fraunhofer HHI Fraunhofer HHI


6 Image Processing Pipeline Processing & Analysis scene acquisition geometry motion / deformation semantic data inspection rendering & display Fraunhofer HHI


7 2D Scene Capturing Projection of 3D scene into 2D image plane Loss of 1 dimension Still images or video Higher and higher resolution Fraunhofer HHI
8 Image Reprojection perspective camera fisheye camera Camera calibration determines parameters of projection Image can be reprojected onto any other surface But viewing position cannot be changed Fraunhofer HHI

9 Image Reprojection perspective camera fisheye camera Fraunhofer HHI




10 Spectral Sensitivity NIR imaging RGB image of tumor 500nm Regular camera and humans: RGB colors Multi-spectral imaging can provide material properties Information invisible to humans thermal imaging Fraunhofer HHI
11 3D Scene Capturing disparity d=x l -x r x l x r z~ 3D geometry can be estimated from multiple views (photogrammetry) Ill-posed problem Requires determination of corresponding points between views Epipolar geometry constrains search space triangulation Fraunhofer HHI
 Dense reconstruction from 2 or more")
 Fraunhofer HHI 13.07.")
12 Depth Estimation from Stereo Images captured with high resolution (10-20 MP) Dense reconstruction from 2 or more views Arbitrary objects Reconstruction of entire head or persons (incl. hair, eyes, etc.) Fraunhofer HHI


![Graphics 2014]](/docs-images/80/81304034/images/13-2.jpg "Fraunhofer HHI")
13 High Detail 3D Reconstruction [Blumenthal, Computers & Graphics 2014] Fraunhofer HHI


14 Textured 3D Model from 2 Views Fraunhofer HHI


15 3D Models in Security Applications augmented reality visualization security gates Fraunhofer HHI

16 High Quality 3D Reconstruction Fraunhofer HHI



17 Aerial Surveillance, Object Detection Fraunhofer HHI

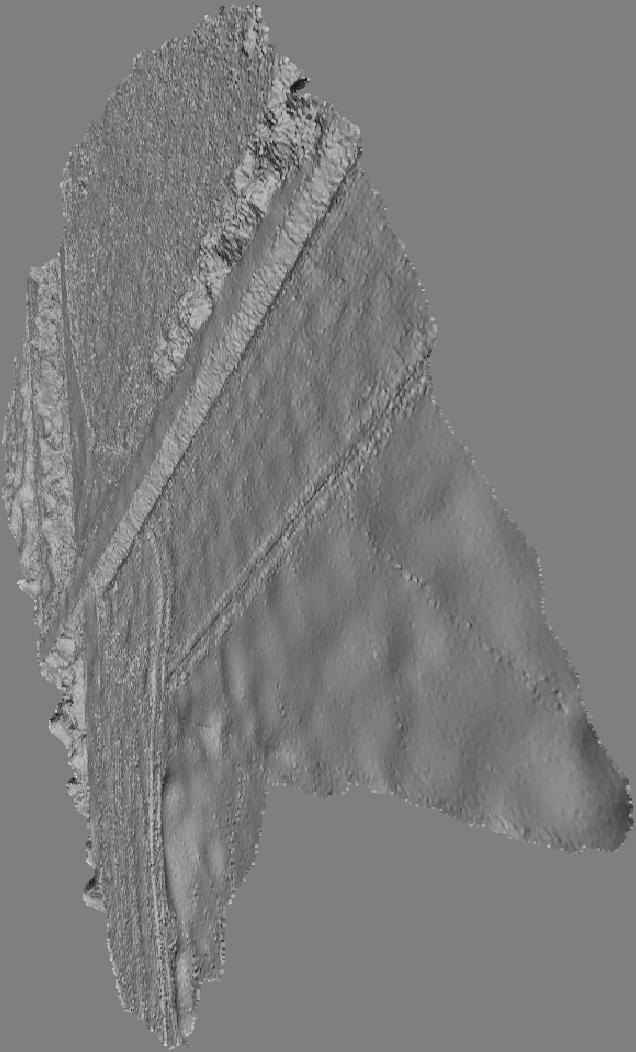

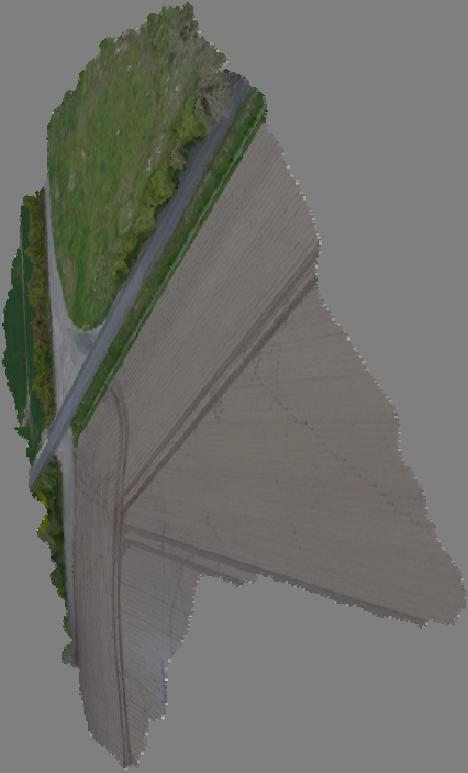
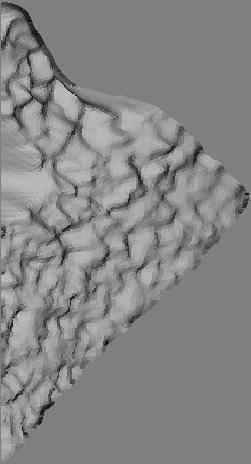
18 Analysis of Vegetation and Landscapes Fraunhofer HHI


19 Inspection of Laser Welds Fraunhofer HHI


20 3D Recording of Footprints Fraunhofer HHI


21 Support of Large Range of Object Sizes Fraunhofer HHI


 Dense /")
22 Tracking and Motion Estimation camera motion object motion Object / camera motion can be determined from point correspondences 3D motion requires additional priors (e.g. static scene, deformation model) Dense / sparse motion models Fraunhofer HHI

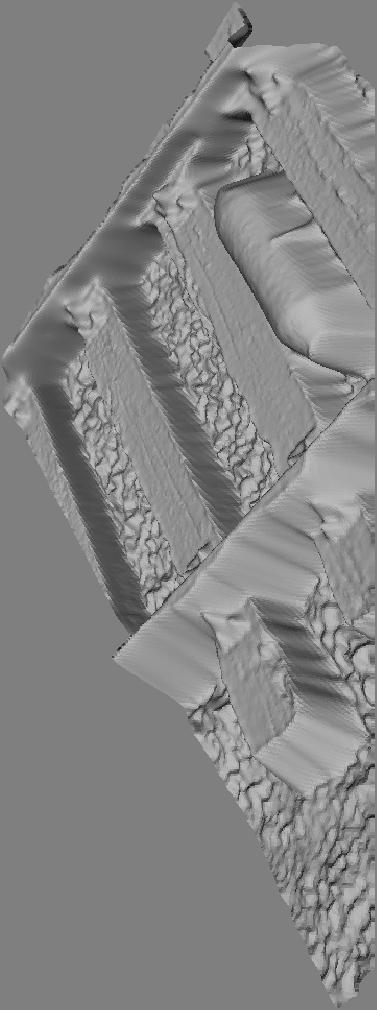
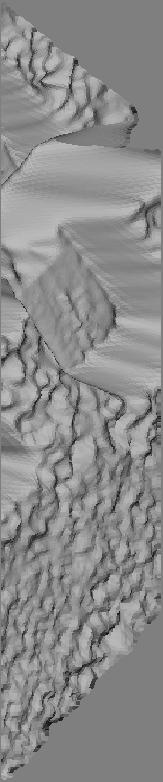
23 3D Motion Tracking of Robot 3D tracking of motion path Corresponding points with epipolar constraint Assumption of near cylindrical pipe shape Fraunhofer HHI



24 Enhanced Surface Textures Projection onto 3D cylinder surface Correction of lighting artifacts Compared to simple unwrap higher resolution less stitching artifacts unwrapping with 3D motion Panoramo Fraunhofer HHI


25 Deformable Surface Tracking Fraunhofer HHI

26 Deformable Surface Tracking Fraunhofer HHI



27 3D Surface Tracking for Navigated Surgery Fraunhofer HHI
![Image Analysis with Machine Learning [ImageNet] Deep neural networks highly successful for many image analysis tasks image](/docs-images/80/81304034/images/28-0.jpg "classification (e.g. detection of defects in pipes) scene labeling / segmentation image synthesis Fraunhofer HHI 13.07.")
28 Image Analysis with Machine Learning [ImageNet] Deep neural networks highly successful for many image analysis tasks image classification (e.g. detection of defects in pipes) scene labeling / segmentation image synthesis Fraunhofer HHI
 Training data")

29 Image Classification (labeled) Training data Classifier Testing Training Fish Fraunhofer HHI

30 Convolutional Neural Network Fraunhofer HHI


31 Explanation of Black Box Black box classifier Explanation of deep neural network decisions Visualization via relevance feedback Fraunhofer HHI




32 Detection of Morphing Attacks Original Morph Detection of morphing attacks in ABC Gates Anomaly detection in passport images Sematic image forensics Machine learning Fraunhofer HHI


 Piecewise affine Our adaptive Original image source: pics.")
33 Creation of Face Morphs Morphing pipeline with exchangeable components Feature detection Warping Blending Automatic alignment of face images based of feature points/feature lines Automatic adaptive blending that prevents visible cuts Field warping Alpha blending (α=.5) Piecewise affine Our adaptive Original image source: pics.stir.ac.uk Fraunhofer HHI


 to increase variations in")

34 Detection of Face Morphs Morphing attack detection using Deep Neural Networks Creation of training and test datasets >1500 original images Image pre-processing (filtering, noise) to increase variations in dataset Comparison of different network architectures Fraunhofer HHI


35 VR / AR for Interaction and Assistance Fraunhofer HHI



36 Dynamic 3D Scene Capturing Fraunhofer HHI

37 TimeLab Fraunhofer HHI



38 Omnidirectional Video High resolution 360 video No stitching artifacts 2D and 3D Real-time end to end streaming Fraunhofer HHI






39 Sample Productions Fraunhofer HHI
40 Summary Image processing and analysis is a powerful tool for many applications Significant progress in imaging hardware High-resolution, ubiquitous and cheap cameras VR / AR glasses Increased computing power (mobile devices, graphics boards) Machine learning enables novel AI technologies New applications in water resource management? Fraunhofer HHI

41 Fraunhofer-Institut für Nachrichtentechnik, Heinrich-Hertz-Institut, HHI WE PUT SCIENCE INTO ACTION. Contact: Einsteinufer Berlin Fraunhofer HHI
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Haoyu Wang s Research in SENSEI project
 Haoyu Wang s Research in SENSEI project Haoyu Wang Electronic Visualization Laboratory University of Illinois at Chicago What is SENSEI project? Short for Sensor Environment Imaging (SENSEI) Instrument
Haoyu Wang s Research in SENSEI project Haoyu Wang Electronic Visualization Laboratory University of Illinois at Chicago What is SENSEI project? Short for Sensor Environment Imaging (SENSEI) Instrument
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Prasanna Krishnaswamy Intel Platform Architect. Imaging Systems Design for Mixed Reality Scenarios
 Prasanna Krishnaswamy Platform Architect Imaging Systems Design for Mixed Reality Scenarios Agenda Mixed Reality (MR) Introduction Key Use Cases MR System Design Overview Imaging Sensors for MR Use Case
Prasanna Krishnaswamy Platform Architect Imaging Systems Design for Mixed Reality Scenarios Agenda Mixed Reality (MR) Introduction Key Use Cases MR System Design Overview Imaging Sensors for MR Use Case
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation
 Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Fraunhofer Heinrich Hertz Institute: Innovations in Medical Technology
 : Innovations in Medical Technology Michael Witte - Berlin, Germany / Cambridge, MA www.hhi.fraunhofer.de Within the Association Key figures Association 80 research units 22.000 employees Budget (2012):
: Innovations in Medical Technology Michael Witte - Berlin, Germany / Cambridge, MA www.hhi.fraunhofer.de Within the Association Key figures Association 80 research units 22.000 employees Budget (2012):
Designing a Self-Calibrating Pipeline for Projection Mapping Application. Kevin Wright Kevin Moule
 Designing a Self-Calibrating Pipeline for Projection Mapping Application Kevin Wright Kevin Moule 2 Who we are Kevin Wright Director of the Application Software group at Christie responsible for developing
Designing a Self-Calibrating Pipeline for Projection Mapping Application Kevin Wright Kevin Moule 2 Who we are Kevin Wright Director of the Application Software group at Christie responsible for developing
Camera Calibration for a Robust Omni-directional Photogrammetry System
 Camera Calibration for a Robust Omni-directional Photogrammetry System Fuad Khan 1, Michael Chapman 2, Jonathan Li 3 1 Immersive Media Corporation Calgary, Alberta, Canada 2 Ryerson University Toronto,
Camera Calibration for a Robust Omni-directional Photogrammetry System Fuad Khan 1, Michael Chapman 2, Jonathan Li 3 1 Immersive Media Corporation Calgary, Alberta, Canada 2 Ryerson University Toronto,
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Precise laser-based optical 3D measurement of welding seams under water
 Precise laser-based optical 3D measurement of welding seams under water ISPRS/CIPA Workshop Underwater 3D Recording & Modeling" Piano di Sorrento (Napoli), Italy 16. 17. April 2015 Tanja Ekkel (M.Sc.)
Precise laser-based optical 3D measurement of welding seams under water ISPRS/CIPA Workshop Underwater 3D Recording & Modeling" Piano di Sorrento (Napoli), Italy 16. 17. April 2015 Tanja Ekkel (M.Sc.)
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Omni Stereo Vision of Cooperative Mobile Robots
 Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Image Transfer Methods. Satya Prakash Mallick Jan 28 th, 2003
 Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
3D from Images - Assisted Modeling, Photogrammetry. Marco Callieri ISTI-CNR, Pisa, Italy
 3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Image-Based Modeling and Rendering
 Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Synthesizing Realistic Facial Expressions from Photographs
 Synthesizing Realistic Facial Expressions from Photographs 1998 F. Pighin, J Hecker, D. Lischinskiy, R. Szeliskiz and D. H. Salesin University of Washington, The Hebrew University Microsoft Research 1
Synthesizing Realistic Facial Expressions from Photographs 1998 F. Pighin, J Hecker, D. Lischinskiy, R. Szeliskiz and D. H. Salesin University of Washington, The Hebrew University Microsoft Research 1
Intelligent photogrammetry. Agisoft
 Intelligent photogrammetry Agisoft Agisoft Metashape is a cutting edge software solution, with its engine core driving photogrammetry to its ultimate limits, while the whole system is designed to deliver
Intelligent photogrammetry Agisoft Agisoft Metashape is a cutting edge software solution, with its engine core driving photogrammetry to its ultimate limits, while the whole system is designed to deliver
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Challenges and solutions for real-time immersive video communication
 Challenges and solutions for real-time immersive video communication Part III - 15 th of April 2005 Dr. Oliver Schreer Fraunhofer Institute for Telecommunications Heinrich-Hertz-Institut, Berlin, Germany
Challenges and solutions for real-time immersive video communication Part III - 15 th of April 2005 Dr. Oliver Schreer Fraunhofer Institute for Telecommunications Heinrich-Hertz-Institut, Berlin, Germany
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Image Processing: Motivation Rendering from Images. Related Work. Overview. Image Morphing Examples. Overview. View and Image Morphing CS334
 Motivation Rendering from Images Image rocessing: View and CS334 Given left image right image Create intermediate images simulates camera movement [Seitz96] Related Work anoramas ([Chen95/QuicktimeVR],
Motivation Rendering from Images Image rocessing: View and CS334 Given left image right image Create intermediate images simulates camera movement [Seitz96] Related Work anoramas ([Chen95/QuicktimeVR],
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera Stereo
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera Stereo
Flow Estimation. Min Bai. February 8, University of Toronto. Min Bai (UofT) Flow Estimation February 8, / 47
 Flow Estimation February 8, / 47") Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments
 Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments Nikos Komodakis and Georgios Tziritas Computer Science Department, University of Crete E-mails: {komod,
Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments Nikos Komodakis and Georgios Tziritas Computer Science Department, University of Crete E-mails: {komod,
Measurement of 3D Foot Shape Deformation in Motion
 Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
What is computer vision?
 What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
Image-Based Rendering using Image-Warping Motivation and Background
 Image-Based Rendering using Image-Warping Motivation and Background Leonard McMillan LCS Computer Graphics Group MIT The field of three-dimensional computer graphics has long focused on the problem of
Image-Based Rendering using Image-Warping Motivation and Background Leonard McMillan LCS Computer Graphics Group MIT The field of three-dimensional computer graphics has long focused on the problem of
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Multi-View Omni-Directional Imaging
 Multi-View Omni-Directional Imaging Tuesday, December 19, 2000 Moshe Ben-Ezra, Shmuel Peleg Abstract This paper describes a novel camera design or the creation o multiple panoramic images, such that each
Multi-View Omni-Directional Imaging Tuesday, December 19, 2000 Moshe Ben-Ezra, Shmuel Peleg Abstract This paper describes a novel camera design or the creation o multiple panoramic images, such that each
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
12/3/2009. What is Computer Vision? Applications. Application: Assisted driving Pedestrian and car detection. Application: Improving online search
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India
 A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
Project report Augmented reality with ARToolKit
 Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
RENDERING AND ANALYSIS OF FACES USING MULTIPLE IMAGES WITH 3D GEOMETRY. Peter Eisert and Jürgen Rurainsky
 RENDERING AND ANALYSIS OF FACES USING MULTIPLE IMAGES WITH 3D GEOMETRY Peter Eisert and Jürgen Rurainsky Fraunhofer Institute for Telecommunications, Heinrich-Hertz-Institute Image Processing Department
RENDERING AND ANALYSIS OF FACES USING MULTIPLE IMAGES WITH 3D GEOMETRY Peter Eisert and Jürgen Rurainsky Fraunhofer Institute for Telecommunications, Heinrich-Hertz-Institute Image Processing Department
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
SL A Tordivel - Thor Vollset -Stereo Vision and structured illumination creates dense 3D Images Page 1
 Tordivel ASTORDIVEL 2000-2015 Scorpion Vision Software Scorpion Stinger are trademarks SL-2010-0001-A AS - Scorpion Visionand 8 and 3DMaMa Tordivel ASof Tordivel AS 2000-2010 Page 1 Stereo Vision and structured
Tordivel ASTORDIVEL 2000-2015 Scorpion Vision Software Scorpion Stinger are trademarks SL-2010-0001-A AS - Scorpion Visionand 8 and 3DMaMa Tordivel ASof Tordivel AS 2000-2010 Page 1 Stereo Vision and structured
Project Periodic Report Summary
 Project Periodic Report Summary Month 12 Date: 24.7.2014 Grant Agreement number: EU 323567 Project acronym: HARVEST4D Project title: Harvesting Dynamic 3D Worlds from Commodity Sensor Clouds TABLE OF CONTENTS
Project Periodic Report Summary Month 12 Date: 24.7.2014 Grant Agreement number: EU 323567 Project acronym: HARVEST4D Project title: Harvesting Dynamic 3D Worlds from Commodity Sensor Clouds TABLE OF CONTENTS
Il colore: acquisizione e visualizzazione. Lezione 17: 11 Maggio 2012
 Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Visual Pathways to the Brain
 Visual Pathways to the Brain 1 Left half of visual field which is imaged on the right half of each retina is transmitted to right half of brain. Vice versa for right half of visual field. From each eye
Visual Pathways to the Brain 1 Left half of visual field which is imaged on the right half of each retina is transmitted to right half of brain. Vice versa for right half of visual field. From each eye
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Vision-Based Technologies for Security in Logistics. Alberto Isasi
 Vision-Based Technologies for Security in Logistics Alberto Isasi aisasi@robotiker.es INFOTECH is the Unit of ROBOTIKER-TECNALIA specialised in Research, Development and Application of Information and
Vision-Based Technologies for Security in Logistics Alberto Isasi aisasi@robotiker.es INFOTECH is the Unit of ROBOTIKER-TECNALIA specialised in Research, Development and Application of Information and
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Planar homographies. Can we reconstruct another view from one image? vgg/projects/singleview/
 Planar homographies Goal: Introducing 2D Homographies Motivation: What is the relation between a plane in the world and a perspective image of it? Can we reconstruct another view from one image? Readings:
Planar homographies Goal: Introducing 2D Homographies Motivation: What is the relation between a plane in the world and a perspective image of it? Can we reconstruct another view from one image? Readings:
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Jingyi Yu CISC 849. Department of Computer and Information Science
 Digital Photography and Videos Jingyi Yu CISC 849 Light Fields, Lumigraph, and Image-based Rendering Pinhole Camera A camera captures a set of rays A pinhole camera captures a set of rays passing through
Digital Photography and Videos Jingyi Yu CISC 849 Light Fields, Lumigraph, and Image-based Rendering Pinhole Camera A camera captures a set of rays A pinhole camera captures a set of rays passing through
Multiview Photogrammetry 3D Virtual Geology for everyone
 Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
S7348: Deep Learning in Ford's Autonomous Vehicles. Bryan Goodman Argo AI 9 May 2017
 S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images
 Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering
 AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering www.csse.uwa.edu.au/~ajmal/ Overview Aim of automatic human action recognition Applications
AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering www.csse.uwa.edu.au/~ajmal/ Overview Aim of automatic human action recognition Applications
Model-Based Stereo. Chapter Motivation. The modeling system described in Chapter 5 allows the user to create a basic model of a
 96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
Announcements. Mosaics. How to do it? Image Mosaics
 Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Hierarchical Matching Techiques for Automatic Image Mosaicing
 Hierarchical Matching Techiques for Automatic Image Mosaicing C.L Begg, R Mukundan Department of Computer Science, University of Canterbury, Christchurch, New Zealand clb56@student.canterbury.ac.nz, mukund@cosc.canterbury.ac.nz
Hierarchical Matching Techiques for Automatic Image Mosaicing C.L Begg, R Mukundan Department of Computer Science, University of Canterbury, Christchurch, New Zealand clb56@student.canterbury.ac.nz, mukund@cosc.canterbury.ac.nz
IMAGE-BASED RENDERING TECHNIQUES FOR APPLICATION IN VIRTUAL ENVIRONMENTS
 IMAGE-BASED RENDERING TECHNIQUES FOR APPLICATION IN VIRTUAL ENVIRONMENTS Xiaoyong Sun A Thesis submitted to the Faculty of Graduate and Postdoctoral Studies in partial fulfillment of the requirements for
IMAGE-BASED RENDERING TECHNIQUES FOR APPLICATION IN VIRTUAL ENVIRONMENTS Xiaoyong Sun A Thesis submitted to the Faculty of Graduate and Postdoctoral Studies in partial fulfillment of the requirements for
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds
 www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
C280, Computer Vision
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
instantreality Industrial Applications developed within the Mixed Reality Framework
 instantreality Dr. Uli Bockholt Virtual and Augmented Reality ISMAR 2008 15. September 2008 + Synopsis Outline Requirements in Industrial Projects Robust and Markerless Tracking Augmented Reality on Embedded
instantreality Dr. Uli Bockholt Virtual and Augmented Reality ISMAR 2008 15. September 2008 + Synopsis Outline Requirements in Industrial Projects Robust and Markerless Tracking Augmented Reality on Embedded
3D Time-of-Flight Image Sensor Solutions for Mobile Devices
 3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D