Windows Phone Week5 Tuesday -
|
|
|
- Roxanne Hodge
- 5 years ago
- Views:
Transcription

1 Windows Phone Week5 Tuesday - Smart Embedded System Lab Kookmin University 1
2 Objectives and what to study Training 1: To Get Accelerometer Sensor Value Training 2: To Get Compass Sensor Value To Get Compass Sensor Value Training 3: To Get Gyrometer Sensor Value To Get Gyrometer Sensor Value 2
3 Objectives Sensor of Windows Phone Behind source code programing What to study How to get accelerometer sensor value How to get compass sensor value How to get gyrometer sensor value 3


4 Windows Phone sensors Windows Phone supports multiple sensors that allow apps to determine the orientation and motion of the device Accelerometer Measuring the forces applied to the device at a moment in time Compass (Magnetometer) Determining the angle by which the device is rotated relative to the Earth s magnetic. Gyroscope Determining the rotational velocity of the device in each axis Ambient Light Sensor Windows Phone Sensor Fusion 4
5 To Get Accelerometer Sensor Value Lab 5


6 Training 1: To Get Accelerometer Sensor Value Using Accelerometer Sensor 6
7 Create a New Project File -> New Project -> Project 7
8 New Project New Project Window Template -> Visual C# -> Store App -> Windows Phone App 8
9 New Project New Project Window Framework:.Net Framework 4.5 9
10 New Project New Project Window Empty App(Windows Phone) 10

11 New Project Name: Accelerometer 11

12 The Created Project 12
13 Solution Explorer MainPage.xaml 13

14 Layout MainPage.xaml 14
15 Layout 1 st Row TextBlock Text= Accelermeter 2 nd Row TextBlock Text= X = 3 rd Row TextBlock Text= Y = 4 th Row TextBlock Text= Z = 5 th Row Button Content= Start 15
16 Layout Completing the Layout Source Code 16
17 Button Click Event Double Click Button control of Layout View 17
18 Behind Source code To Declare Local Variable 18
19 Behind Source code MainPage() 19
20 Behind Source code To Add DisplayCurrentReading() Method 20
21 Behind Source code Filling up button event method 21
22 Setting up target Device 22
23 Building and Run on the Windows Phone Build -> Solution Build 23
24 Building and Run on the Windows Phone Debug -> Start without debugging 24
25 Ready for installing app to Windows phone 25
26 Training Application Test 26
27 To Get Compass Sensor Value Lab 27
28 Training 2: To Get Compass Sensor Value Using Compass Sensor 28
29 Create a New Project File -> New Project -> Project 29
30 New Project New Project Window Template -> Visual C# -> Store App -> Windows Phone App 30
31 New Project New Project Window Framework:.Net Framework
32 New Project New Project Window Empty App(Windows Phone) 32
33 New Project New project window Name : CompassSensor 1 CompassSensor CompassSensor 2 33

34 The Created Project 34

35 Solution Explorer MainPage.xaml 35

36 Layout MainPage.xaml 36
37 Layout 1 st Row TextBlock Text= Compass 2 nd Row TextBlock Text= Magnetic = 3 rd Row TextBlock Text= True = 4 th Row Button Content= Start 37
38 Layout Completing the Layout Source Code 38

39 Layout To Add Button Event 39
40 Behind Source Code To Add Sensors Library and Declare Local Variable 40
41 Behind Source Code 41
42 Behind Source Code Filling up button event method 42
43 Behind Source Code To add DisplayCurrentReading() method 43
44 Setting up target Device 44
45 Building and Run on the Windows Phone Build -> Solution Build 45
46 Building and Run on the Windows Phone Debug -> Start without debugging 46
47 Ready for installing app to Windows phone 47
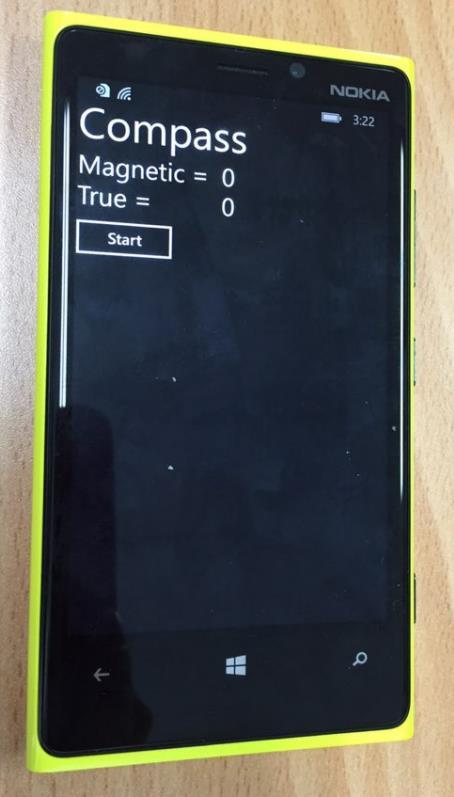
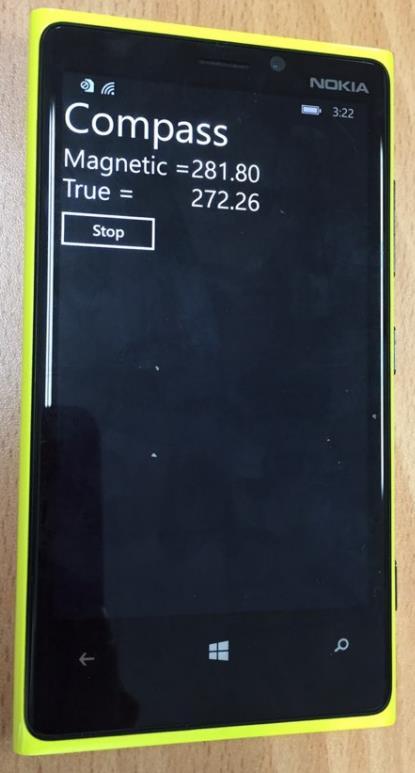
48 Training Application Test 48

49 To Get Gyrometer Sensor Value Lab 49
50 Training 3: To Get Gyrometer Sensor Value Using Gyrometer Sensor 50

51 Create a New Project File -> New Project -> Project 51
52 New Project New Project Window Template -> Visual C# -> Store App -> Windows Phone App 52
53 New Project New Project Window Framework:.Net Framework
54 New Project New Project Window Empty App(Windows Phone) 54
55 New Project New project window Name : Gyrometer 1 Gyrometer Gyrometer 2 55
56 The Created Project 56

57 Layout MainPage.xaml 57
58 Solution Explorer MainPage.xaml 58
59 Layout 1 st Row TextBlock Text= Gyrometer 2 nd Row TextBlock Text= X = 3 rd Row TextBlock Text= Y = 4 th Row TextBlock Text= Z = 5 th Row Button Content= Start 59
60 Layout Completing the Layout Source Code 60

61 Layout To Add Button Event 61
62 Behind Source Code To Add Sensors Library and Declare Local Variable 62
63 Behind Source Code MainPage() 63
64 Behind Source Code To Write Button Event Method 64
65 Behind Source Code To add ReadingChanged() method 65

66 Setting up target Device 66

67 Building and Run on the Windows Phone Build -> Solution Build 67

68 Building and Run on the Windows Phone Debug -> Start without debugging 68

69 Ready for installing app to Windows phone 69
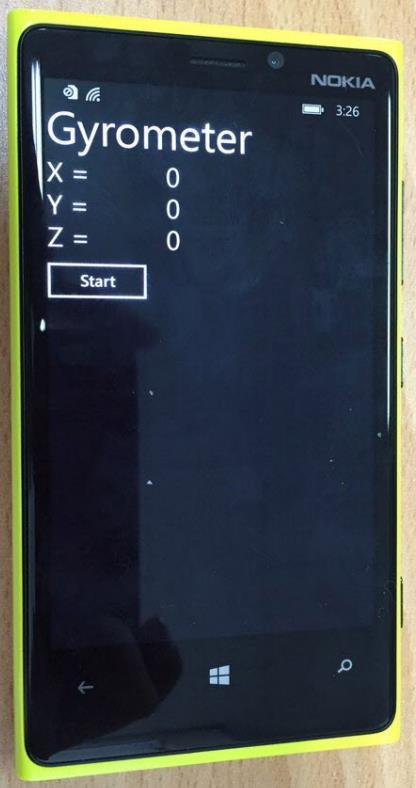

70 Training Application Test 70
Tap Position Inference on Smart Phones
 Tap Position Inference on Smart Phones Ankush Chauhan 11-29-2017 Outline Introduction Application Architecture Sensor Event Data Sensor Data Collection App Demonstration Scalable Data Collection Pipeline
Tap Position Inference on Smart Phones Ankush Chauhan 11-29-2017 Outline Introduction Application Architecture Sensor Event Data Sensor Data Collection App Demonstration Scalable Data Collection Pipeline
Me 3-Axis Accelerometer and Gyro Sensor
 Me 3-Axis Accelerometer and Gyro Sensor SKU: 11012 Weight: 20.00 Gram Description: Me 3-Axis Accelerometer and Gyro Sensor is a motion processing module. It can use to measure the angular rate and the
Me 3-Axis Accelerometer and Gyro Sensor SKU: 11012 Weight: 20.00 Gram Description: Me 3-Axis Accelerometer and Gyro Sensor is a motion processing module. It can use to measure the angular rate and the
Fundamentals of XAML and Microsoft Expression Blend
 10553A - Version: 1 22 April 2018 Fundamentals of XAML and Microsoft Expression Blend Fundamentals of XAML and Microsoft Expression Blend 10553A - Version: 1 3 days Course Description: This 3-day course
10553A - Version: 1 22 April 2018 Fundamentals of XAML and Microsoft Expression Blend Fundamentals of XAML and Microsoft Expression Blend 10553A - Version: 1 3 days Course Description: This 3-day course
windows-10-universal #windows- 10-universal
 windows-10-universal #windows- 10-universal Table of Contents About 1 Chapter 1: Getting started with windows-10-universal 2 Remarks 2 Examples 2 Installation or Setup 2 Creating a new project (C# / XAML)
windows-10-universal #windows- 10-universal Table of Contents About 1 Chapter 1: Getting started with windows-10-universal 2 Remarks 2 Examples 2 Installation or Setup 2 Creating a new project (C# / XAML)
SIMA Raw Data Simulation Software for the Development and Validation of Algorithms. Platforms
 FIG working week 2012 Rome SIMA Raw Data Simulation Software for the Development and Validation of Algorithms for GNSS and MEMS based Multi Sensor Navigation Platforms Andreas Hoscislawski HS Karlsruhe,
FIG working week 2012 Rome SIMA Raw Data Simulation Software for the Development and Validation of Algorithms for GNSS and MEMS based Multi Sensor Navigation Platforms Andreas Hoscislawski HS Karlsruhe,
Game Application Using Orientation Sensor
 IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 04, Issue 01 (January. 2014), V4 PP 46-50 www.iosrjen.org Game Application Using Orientation Sensor Soon-kak Kwon, Won-serk
IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 04, Issue 01 (January. 2014), V4 PP 46-50 www.iosrjen.org Game Application Using Orientation Sensor Soon-kak Kwon, Won-serk
EE 570: Location and Navigation: Theory & Practice
 EE 570: Location and Navigation: Theory & Practice Navigation Mathematics Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 14 Coordinate Frames - ECI The Earth-Centered
EE 570: Location and Navigation: Theory & Practice Navigation Mathematics Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 14 Coordinate Frames - ECI The Earth-Centered
HCOMM Reference Manual
 HCOMM Reference Manual Document Number: 1000-2984 Document Revision: 0.3.2 Date: December 23, 2013 November 21, 2013 1000-2984 Revision 0.3.1 1 / 49 Copyright 2012, Hillcrest Laboratories, Inc. All rights
HCOMM Reference Manual Document Number: 1000-2984 Document Revision: 0.3.2 Date: December 23, 2013 November 21, 2013 1000-2984 Revision 0.3.1 1 / 49 Copyright 2012, Hillcrest Laboratories, Inc. All rights
Movit System G1 WIRELESS MOTION DEVICE SYSTEM
 Movit System G1 WIRELESS MOTION DEVICE SYSTEM 1 INTRODUCTION The Movit System G1 incorporates multiple wireless motion devices (Movit G1) with the Dongle G1 station, dedicated software and a set of full
Movit System G1 WIRELESS MOTION DEVICE SYSTEM 1 INTRODUCTION The Movit System G1 incorporates multiple wireless motion devices (Movit G1) with the Dongle G1 station, dedicated software and a set of full
Towards the Consumerization of Smart Sensors
 Towards the Consumerization of Smart Sensors Roberto De Nuccio Business Development Manager MEMS, Sensors and High-Performance Analog Division STMicroelectronics Micro-Electro-Mechanical Systems (MEMS)
Towards the Consumerization of Smart Sensors Roberto De Nuccio Business Development Manager MEMS, Sensors and High-Performance Analog Division STMicroelectronics Micro-Electro-Mechanical Systems (MEMS)
Fusing Sensors into Mobile Operating Systems & Innovative Use Cases
 Fusing Sensors into Mobile Operating Systems & Innovative Use Cases May 23, 2012 Tristan Joo (tristanjoo@wca.org) Board Director & Co-Chair of Mobile SIG Wireless Communications Alliance, Independent Executive
Fusing Sensors into Mobile Operating Systems & Innovative Use Cases May 23, 2012 Tristan Joo (tristanjoo@wca.org) Board Director & Co-Chair of Mobile SIG Wireless Communications Alliance, Independent Executive
NE Fundamentals of XAML and Microsoft Expression Blend
 NE-10553 Fundamentals of XAML and Microsoft Expression Blend Summary Duration 3 Days Audience Developers Level 200 Technology Microsoft Expression Blend Delivery Method Instructor-led (Classroom) Training
NE-10553 Fundamentals of XAML and Microsoft Expression Blend Summary Duration 3 Days Audience Developers Level 200 Technology Microsoft Expression Blend Delivery Method Instructor-led (Classroom) Training
Cross-Domain Development Kit XDK110 Platform for Application Development
 Examples Overview Cross-Domain Development Kit Platform for Application Development Bosch Connected Devices and Solutions : Data Sheet Document revision 1.0 Document release date 03/08/16 Document number
Examples Overview Cross-Domain Development Kit Platform for Application Development Bosch Connected Devices and Solutions : Data Sheet Document revision 1.0 Document release date 03/08/16 Document number
PART I: INTRODUCTION TO WINDOWS 8 APPLICATION DEVELOPMENT CHAPTER 1: A BRIEF HISTORY OF WINDOWS APPLICATION DEVELOPMENT 3
 INTRODUCTION xix PART I: INTRODUCTION TO WINDOWS 8 APPLICATION DEVELOPMENT CHAPTER 1: A BRIEF HISTORY OF WINDOWS APPLICATION DEVELOPMENT 3 The Life of Windows 3 From Windows 3.1 to 32-bit 4 Windows XP
INTRODUCTION xix PART I: INTRODUCTION TO WINDOWS 8 APPLICATION DEVELOPMENT CHAPTER 1: A BRIEF HISTORY OF WINDOWS APPLICATION DEVELOPMENT 3 The Life of Windows 3 From Windows 3.1 to 32-bit 4 Windows XP
Main components MEMS motion sensor: low power high g 3-axis digital accelerometer inemo inertial module: 3D accelerometer and 3D gyroscope
 DT0053 Design tip 6-point tumble sensor calibration By Andrea Vitali H3LIS331DL LSM6DS3 Main components MEMS motion sensor: low power high g 3-axis digital accelerometer inemo inertial module: 3D accelerometer
DT0053 Design tip 6-point tumble sensor calibration By Andrea Vitali H3LIS331DL LSM6DS3 Main components MEMS motion sensor: low power high g 3-axis digital accelerometer inemo inertial module: 3D accelerometer
CHANNEL9 S WINDOWS PHONE 8.1 DEVELOPMENT FOR ABSOLUTE BEGINNERS
 CHANNEL9 S WINDOWS PHONE 8.1 DEVELOPMENT FOR ABSOLUTE BEGINNERS Full Text Version of the Video Series Published April, 2014 Bob Tabor http://www.learnvisualstudio.net Contents Introduction... 2 Lesson
CHANNEL9 S WINDOWS PHONE 8.1 DEVELOPMENT FOR ABSOLUTE BEGINNERS Full Text Version of the Video Series Published April, 2014 Bob Tabor http://www.learnvisualstudio.net Contents Introduction... 2 Lesson
micro:bit Lesson 1. Using the Built-in Sensors
 micro:bit Lesson 1. Using the Built-in Sensors Created by Simon Monk Last updated on 2018-03-02 05:46:13 PM UTC Guide Contents Guide Contents Overview Magnetometer Magnet Detector High-strength 'rare earth'
micro:bit Lesson 1. Using the Built-in Sensors Created by Simon Monk Last updated on 2018-03-02 05:46:13 PM UTC Guide Contents Guide Contents Overview Magnetometer Magnet Detector High-strength 'rare earth'
navigation Isaac Skog
 Foot-mounted zerovelocity aided inertial navigation Isaac Skog skog@kth.se Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors
Foot-mounted zerovelocity aided inertial navigation Isaac Skog skog@kth.se Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors
Mobile Influenced Markets Evolution of Camera and Display Uses
 Tom Watzka Satwant Singh Mobile Influenced Markets Evolution of Camera and Display Uses Lattice MIPI D-PHY Applications The PC industry created demand in adjacent markets such as test equipment, POS terminals,
Tom Watzka Satwant Singh Mobile Influenced Markets Evolution of Camera and Display Uses Lattice MIPI D-PHY Applications The PC industry created demand in adjacent markets such as test equipment, POS terminals,
[MS10553]: Fundamentals of XAML and Microsoft Expression Blend
![[MS10553]: Fundamentals of XAML and Microsoft Expression Blend](/thumbs/77/74640746.jpg "[MS10553]: Fundamentals of XAML and Microsoft Expression Blend") [MS10553]: Fundamentals of XAML and Microsoft Expression Blend Length : 3 Days Audience(s) : Developers Level : 200 Technology : Microsoft Expression Blend Delivery Method : Instructor-led (classroom)
[MS10553]: Fundamentals of XAML and Microsoft Expression Blend Length : 3 Days Audience(s) : Developers Level : 200 Technology : Microsoft Expression Blend Delivery Method : Instructor-led (classroom)
S AMPLE CHAPTER IN ACTION. Timothy Binkley-Jones Massimo Perga Michael Sync MANNING
 S AMPLE CHAPTER IN ACTION Timothy Binkley-Jones Massimo Perga Michael Sync MANNING Windows Phone 7 in Action by Timothy Binkley-Jones Massimo Perga Michael Sync Chapter 8 Copyright 2013 Manning Publications
S AMPLE CHAPTER IN ACTION Timothy Binkley-Jones Massimo Perga Michael Sync MANNING Windows Phone 7 in Action by Timothy Binkley-Jones Massimo Perga Michael Sync Chapter 8 Copyright 2013 Manning Publications
LSM303 Tilt Compensated Compass(SEN0079)
") LSM303 Tilt Compensated Compass(SEN0079) Contents 1 Introduction 2 Specifications 3 Applications 4 Connection Diagram 5 Download library 6 Sample Code(Read Navigation Angle) 7 Sample Code(Read Raw Data)
LSM303 Tilt Compensated Compass(SEN0079) Contents 1 Introduction 2 Specifications 3 Applications 4 Connection Diagram 5 Download library 6 Sample Code(Read Navigation Angle) 7 Sample Code(Read Raw Data)
Preface...3 Acknowledgments...4. Contents...5. List of Figures...17
 Contents - 5 Contents Preface...3 Acknowledgments...4 Contents...5 List of Figures...17 Introduction...23 History of Delphi...24 Delphi for mobile platforms...27 About this book...27 About the author...29
Contents - 5 Contents Preface...3 Acknowledgments...4 Contents...5 List of Figures...17 Introduction...23 History of Delphi...24 Delphi for mobile platforms...27 About this book...27 About the author...29
Computing tilt measurement and tilt-compensated e-compass
 DT0058 Design tip Computing tilt measurement and tilt-compensated e-compass By Andrea Vitali Main components LSM303AGR LSM303C LSM303D Ultra compact high-performance e-compass: ultra-low-power 3D accelerometer
DT0058 Design tip Computing tilt measurement and tilt-compensated e-compass By Andrea Vitali Main components LSM303AGR LSM303C LSM303D Ultra compact high-performance e-compass: ultra-low-power 3D accelerometer
Sphero Lightning Lab Cheat Sheet
 Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
3D Surface Plots with Groups
 Chapter 942 3D Surface Plots with Groups Introduction In PASS, it is easy to study power and sample size calculations for a range of possible parameter values. When at least 3 input parameters vary, you
Chapter 942 3D Surface Plots with Groups Introduction In PASS, it is easy to study power and sample size calculations for a range of possible parameter values. When at least 3 input parameters vary, you
Indoor navigation using smartphones. Chris Hide IESSG, University of Nottingham, UK
 Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
CMMotionManager Overview
 MSDOSX Core Motion CMMotionManager Overview A CMMotionManager object is the gateway Accelerometer data Rotation-rate data Magnetometer data Other device-motion data such as attitude Create one instance
MSDOSX Core Motion CMMotionManager Overview A CMMotionManager object is the gateway Accelerometer data Rotation-rate data Magnetometer data Other device-motion data such as attitude Create one instance
Satellite and Inertial Navigation and Positioning System
 Satellite and Inertial Navigation and Positioning System Project Proposal By: Luke Pfister Dan Monroe Project Advisors: Dr. In Soo Ahn Dr. Yufeng Lu EE 451 Senior Capstone Project December 10, 2009 PROJECT
Satellite and Inertial Navigation and Positioning System Project Proposal By: Luke Pfister Dan Monroe Project Advisors: Dr. In Soo Ahn Dr. Yufeng Lu EE 451 Senior Capstone Project December 10, 2009 PROJECT
Quick Start Guide for FRDM-FXS-MULTI-B
 Quick Start Guide for FRDM-FXS-MULTI-B Contents: Quick Start Package Overview Get to Know the FRDM-FXS-MULTI-B Getting Started Out of the Box Explore Further freescale.com/frdm-multi-b External Use FRDMFXSMULTIBQSG
Quick Start Guide for FRDM-FXS-MULTI-B Contents: Quick Start Package Overview Get to Know the FRDM-FXS-MULTI-B Getting Started Out of the Box Explore Further freescale.com/frdm-multi-b External Use FRDMFXSMULTIBQSG
Introduction p. 1 Getting Started Hello, Real World p. 9 Creating, Deploying, and Profiling an App p. 9 Understanding the App Package p.
 Introduction p. 1 Getting Started Hello, Real World p. 9 Creating, Deploying, and Profiling an App p. 9 Understanding the App Package p. 12 Updating XAML and C# Code p. 22 Making the App World-Ready p.
Introduction p. 1 Getting Started Hello, Real World p. 9 Creating, Deploying, and Profiling an App p. 9 Understanding the App Package p. 12 Updating XAML and C# Code p. 22 Making the App World-Ready p.
Using SensorTag as a Low-Cost Sensor Array for AutoCAD
 Using SensorTag as a Low-Cost Sensor Array for AutoCAD Kean Walmsley Autodesk SD5013 In 2012 Texas Instruments Inc. launched the SensorTag, a $25 sensor array that communicates via Bluetooth Smart (also
Using SensorTag as a Low-Cost Sensor Array for AutoCAD Kean Walmsley Autodesk SD5013 In 2012 Texas Instruments Inc. launched the SensorTag, a $25 sensor array that communicates via Bluetooth Smart (also
MAD Gaze x HKCS. Best Smart Glass App Competition Developer Guidelines VERSION 1.0.0
 MAD Gaze x HKCS Best Smart Glass App Competition Developer Guidelines VERSION 1.0.0 20 MAY 2016 Table of Contents 1. Objective 2. Hardware Specification 3. Operating MAD Gaze 4. Hardware Sensors 4.1 Accelerometer
MAD Gaze x HKCS Best Smart Glass App Competition Developer Guidelines VERSION 1.0.0 20 MAY 2016 Table of Contents 1. Objective 2. Hardware Specification 3. Operating MAD Gaze 4. Hardware Sensors 4.1 Accelerometer
Inertial Measurement Units I!
 ! Inertial Measurement Units I! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 9! stanford.edu/class/ee267/!! Lecture Overview! coordinate systems (world, body/sensor, inertial,
! Inertial Measurement Units I! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 9! stanford.edu/class/ee267/!! Lecture Overview! coordinate systems (world, body/sensor, inertial,
Tizen Sensors (Tizen Ver. 2.3)
") Tizen Sensors (Tizen Ver. 2.3) Spring 2015 Soo Dong Kim, Ph.D. Professor, Department of Computer Science Software Engineering Laboratory Soongsil University Office 02-820-0909 Mobile 010-7392-2220 sdkim777@gmail.com
Tizen Sensors (Tizen Ver. 2.3) Spring 2015 Soo Dong Kim, Ph.D. Professor, Department of Computer Science Software Engineering Laboratory Soongsil University Office 02-820-0909 Mobile 010-7392-2220 sdkim777@gmail.com
Machine Learning for the Quantified Self. Lecture 2 Basic of Sensory Data
 Machine Learning for the Quantified Self Lecture 2 Basic of Sensory Data Dataset (1) During the course we will use a running example provided by CrowdSignals.io People share their mobile sensors data (smart
Machine Learning for the Quantified Self Lecture 2 Basic of Sensory Data Dataset (1) During the course we will use a running example provided by CrowdSignals.io People share their mobile sensors data (smart
This design tip applies to all accelerometers, ecompass modules, and inemo inertial IMUs from STMicroelectronics.
 DT0105 Design tip 1-point or 3-point tumble sensor calibration By Andrea Vitali Purpose and benefits This design tip explains how to compute offset, gain, and cross-axis gain for a 3-axis sensor (usually
DT0105 Design tip 1-point or 3-point tumble sensor calibration By Andrea Vitali Purpose and benefits This design tip explains how to compute offset, gain, and cross-axis gain for a 3-axis sensor (usually
Public Sensing Using Your Mobile Phone for Crowd Sourcing
 Institute of Parallel and Distributed Systems () Universitätsstraße 38 D-70569 Stuttgart Public Sensing Using Your Mobile Phone for Crowd Sourcing 55th Photogrammetric Week September 10, 2015 Stuttgart,
Institute of Parallel and Distributed Systems () Universitätsstraße 38 D-70569 Stuttgart Public Sensing Using Your Mobile Phone for Crowd Sourcing 55th Photogrammetric Week September 10, 2015 Stuttgart,
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]
![9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]](/thumbs/86/94257860.jpg "9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]") 9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
Selection and Integration of Sensors Alex Spitzer 11/23/14
 Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
Sensor-fusion Demo Documentation
 Sensor-fusion Demo Documentation Release 1.2 Alexander Pacha Aug 13, 2018 Contents: 1 Euler Angles 3 2 Installation 5 3 Contribute 7 4 License 9 i ii Sensor-fusion Demo Documentation, Release 1.2 This
Sensor-fusion Demo Documentation Release 1.2 Alexander Pacha Aug 13, 2018 Contents: 1 Euler Angles 3 2 Installation 5 3 Contribute 7 4 License 9 i ii Sensor-fusion Demo Documentation, Release 1.2 This
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Overcoming Hurdles in Wearable Device Designs. John Logan Atmel
 Overcoming Hurdles in Wearable Device Designs John Logan Atmel What is a Wearable New and exciting form factors Touch Screen Clothing Really new and exciting form factors Zoomable Contact Lenses Source,
Overcoming Hurdles in Wearable Device Designs John Logan Atmel What is a Wearable New and exciting form factors Touch Screen Clothing Really new and exciting form factors Zoomable Contact Lenses Source,
Strapdown inertial navigation technology
 Strapdown inertial navigation technology D. H. Titterton and J. L. Weston Peter Peregrinus Ltd. on behalf of the Institution of Electrical Engineers Contents Preface Page xiii 1 Introduction 1 1.1 Navigation
Strapdown inertial navigation technology D. H. Titterton and J. L. Weston Peter Peregrinus Ltd. on behalf of the Institution of Electrical Engineers Contents Preface Page xiii 1 Introduction 1 1.1 Navigation
FAB verses tradition camera-based motion capture systems
 FAB verses tradition camera-based motion capture systems The advent of micromachined inertial sensors, such as rate gyroscopes and accelerometers, has made new navigation and tracking technologies possible.
FAB verses tradition camera-based motion capture systems The advent of micromachined inertial sensors, such as rate gyroscopes and accelerometers, has made new navigation and tracking technologies possible.
XDK HARDWARE OVERVIEW
 XDK HARDWARE OVERVIEW Agenda 1 General Overview 2 3 4 Sensors Communications Extension Board 2 General Overview 1. General Overview What is the XDK? The Cross-Domain Development Kit, or XDK, is a battery
XDK HARDWARE OVERVIEW Agenda 1 General Overview 2 3 4 Sensors Communications Extension Board 2 General Overview 1. General Overview What is the XDK? The Cross-Domain Development Kit, or XDK, is a battery
SH-2 Reference Manual
 SH-2 Reference Manual Document Number: 1000-3625 Document Revision: 1.2 Date: 05/19/2017 Hillcrest Laboratories, Inc. 15245 Shady Grove Road, Suite 400 Rockville, MD 20850 Copyright 2017 Hillcrest Labs,
SH-2 Reference Manual Document Number: 1000-3625 Document Revision: 1.2 Date: 05/19/2017 Hillcrest Laboratories, Inc. 15245 Shady Grove Road, Suite 400 Rockville, MD 20850 Copyright 2017 Hillcrest Labs,
Calibration of Inertial Measurement Units Using Pendulum Motion
 Technical Paper Int l J. of Aeronautical & Space Sci. 11(3), 234 239 (2010) DOI:10.5139/IJASS.2010.11.3.234 Calibration of Inertial Measurement Units Using Pendulum Motion Keeyoung Choi* and Se-ah Jang**
Technical Paper Int l J. of Aeronautical & Space Sci. 11(3), 234 239 (2010) DOI:10.5139/IJASS.2010.11.3.234 Calibration of Inertial Measurement Units Using Pendulum Motion Keeyoung Choi* and Se-ah Jang**
Open Sesame Team. Grant Apodaca. Richie Agpaoa. Evin Sellin. Eric Taba. Jeff Bolin. Team Leader and Bluetooth. ecompass and power design
 Open Sesame 1 Open Sesame Team Grant Apodaca Team Leader and Bluetooth Richie Agpaoa ecompass and power design Evin Sellin USB and embedded design integration Eric Taba Motor control and mechanical components
Open Sesame 1 Open Sesame Team Grant Apodaca Team Leader and Bluetooth Richie Agpaoa ecompass and power design Evin Sellin USB and embedded design integration Eric Taba Motor control and mechanical components
AE483: Lab #1 Sensor Data Collection and Analysis
 AE483: Lab #1 Sensor Data Collection and Analysis T. Bretl September 11, 2017 1 Goal You will be working with the AscTec Hummingbird Quadrotor this semester. There are two sources of sensor data that you
AE483: Lab #1 Sensor Data Collection and Analysis T. Bretl September 11, 2017 1 Goal You will be working with the AscTec Hummingbird Quadrotor this semester. There are two sources of sensor data that you
CENG4480 Embedded System Development and Applications The Chinese University of Hong Kong Laboratory 6: IMU (Inertial Measurement Unit)
") CENG4480 Embedded System Development and Applications The Chinese University of Hong Kong Laboratory 6: IMU (Inertial Measurement Unit) Student ID: 2018 Fall 1 Introduction In this exercise you will learn
CENG4480 Embedded System Development and Applications The Chinese University of Hong Kong Laboratory 6: IMU (Inertial Measurement Unit) Student ID: 2018 Fall 1 Introduction In this exercise you will learn
Testing Approaches for Characterization and Selection of MEMS Inertial Sensors 2016, 2016, ACUTRONIC 1
 Testing Approaches for Characterization and Selection of MEMS Inertial Sensors by Dino Smajlovic and Roman Tkachev 2016, 2016, ACUTRONIC 1 Table of Contents Summary & Introduction 3 Sensor Parameter Definitions
Testing Approaches for Characterization and Selection of MEMS Inertial Sensors by Dino Smajlovic and Roman Tkachev 2016, 2016, ACUTRONIC 1 Table of Contents Summary & Introduction 3 Sensor Parameter Definitions
RoBoard Module RM-G146 Manual V1.01 The Heart of Robotics. Jan 2011 DMP Electronics Inc
 Manual V1.01 Jan 2011 DMP Electronics Inc Copyright The information in this manual is subject to change without notice for continuous improvement in the product. All rights are reserved. The manufacturer
Manual V1.01 Jan 2011 DMP Electronics Inc Copyright The information in this manual is subject to change without notice for continuous improvement in the product. All rights are reserved. The manufacturer
PASS Sample Size Software
 Chapter 941 Introduction In PASS, it is easy to study power and sample size calculations for a range of possible parameter values. When at least 2 input parameters vary, you can create stunning 3D power
Chapter 941 Introduction In PASS, it is easy to study power and sample size calculations for a range of possible parameter values. When at least 2 input parameters vary, you can create stunning 3D power
BNO055 USB Stick user guide
 Application Note BNO055 USB Stick user guide User Motion Quaternion Linear Acceleration Rotation Gravity Robust Heading Application note: BNO055 USB stick user guide Document revision 1.1 Document release
Application Note BNO055 USB Stick user guide User Motion Quaternion Linear Acceleration Rotation Gravity Robust Heading Application note: BNO055 USB stick user guide Document revision 1.1 Document release
Autopilot System. Specification V1.1
 Autopilot System Specification V1.1 Catalog Summary... 1 Specification... 2 1. Hardware... 3 MCU... 3 Sensors... 3 Communication... 3 Power... 3 Extension... 3 2. Interface... 5 1) PIN... 5 2) Looper...
Autopilot System Specification V1.1 Catalog Summary... 1 Specification... 2 1. Hardware... 3 MCU... 3 Sensors... 3 Communication... 3 Power... 3 Extension... 3 2. Interface... 5 1) PIN... 5 2) Looper...
Train the Trainer Resources Hex Files Here - https://goo.gl/mqovrv
 In this topic you will explore the range of methods of input that the micro:bit has, and the commands used to code these inputs. Topic 3 Need Input and Output Write a list of inputs that a micro:bit has.
In this topic you will explore the range of methods of input that the micro:bit has, and the commands used to code these inputs. Topic 3 Need Input and Output Write a list of inputs that a micro:bit has.
COMP30019 Graphics and Interaction Input
 COMP30019 Graphics and Interaction Input Department of Computing and Information Systems The Lecture outline Introduction Touch Input Gestures Picking Sensors Why Touch? Touch interfaces are increasingly
COMP30019 Graphics and Interaction Input Department of Computing and Information Systems The Lecture outline Introduction Touch Input Gestures Picking Sensors Why Touch? Touch interfaces are increasingly
This design tip applies to all accelerometers, ecompass modules, and inemo inertial IMUs from STMicroelectronics.
 DT0106 Design tip Residual linear acceleration by gravity subtraction to enable dead-reckoning By Andrea Vitali Purpose and benefits This design tip explains how to compute the residual linear acceleration,
DT0106 Design tip Residual linear acceleration by gravity subtraction to enable dead-reckoning By Andrea Vitali Purpose and benefits This design tip explains how to compute the residual linear acceleration,
Mio- x AHRS. Attitude and Heading Reference System. Engineering Specifications
 General Description Mio- x AHRS Attitude and Heading Reference System Engineering Specifications Rev. G 2012-05-29 Mio-x AHRS is a tiny sensormodule consists of 9 degree of freedom motion sensors (3 accelerometers,
General Description Mio- x AHRS Attitude and Heading Reference System Engineering Specifications Rev. G 2012-05-29 Mio-x AHRS is a tiny sensormodule consists of 9 degree of freedom motion sensors (3 accelerometers,
CS3240 Human-Computer Interaction Lab Sheet Lab Session 2
 CS3240 Human-Computer Interaction Lab Sheet Lab Session 2 Key Features of Silverlight Page 1 Overview In this lab, you will get familiarized with the key features of Silverlight, such as layout containers,
CS3240 Human-Computer Interaction Lab Sheet Lab Session 2 Key Features of Silverlight Page 1 Overview In this lab, you will get familiarized with the key features of Silverlight, such as layout containers,
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
SE 3S03 - Tutorial 1. Zahra Ali. Week of Feb 1, 2016
 SE 3S03 - Tutorial 1 Department of Computer Science McMaster University naqvis7@mcmaster.ca Week of Feb 1, 2016 testing vs Software Devices and s Devices and s App Device Outline testing vs Software Devices
SE 3S03 - Tutorial 1 Department of Computer Science McMaster University naqvis7@mcmaster.ca Week of Feb 1, 2016 testing vs Software Devices and s Devices and s App Device Outline testing vs Software Devices
ECGR4161/5196 Lecture 6 June 9, 2011
 ECGR4161/5196 Lecture 6 June 9, 2011 YouTube Videos: http://www.youtube.com/watch?v=7hag6zgj78o&feature=p layer_embedded Micro Robotics Worlds smallest robot - Version 1 - "tank" Worlds smallest robot
ECGR4161/5196 Lecture 6 June 9, 2011 YouTube Videos: http://www.youtube.com/watch?v=7hag6zgj78o&feature=p layer_embedded Micro Robotics Worlds smallest robot - Version 1 - "tank" Worlds smallest robot
Portable Class Libraries ---
 Portable Class Libraries --- Overview In this lab, you ll learn about Portable Class Libraries (PCLs). PCLs enable you to create managed assemblies that work on more than one.net Framework platform. Within
Portable Class Libraries --- Overview In this lab, you ll learn about Portable Class Libraries (PCLs). PCLs enable you to create managed assemblies that work on more than one.net Framework platform. Within
Use of ISP1880 Accelero-Magnetometer, Temperature and Barometer Sensor
 Use of Accelero-Magnetometer, Temperature and Barometer Sensor Application Note AN181105 Introduction Scope This application note describes how to set up a Sensor demonstration with Sensors Board that
Use of Accelero-Magnetometer, Temperature and Barometer Sensor Application Note AN181105 Introduction Scope This application note describes how to set up a Sensor demonstration with Sensors Board that
Stéphane Gervais-Ducouret
 TM Stéphane Gervais-Ducouret Global Marketing Director Sensors stephane.gervais@freescale.com 6 th September 2012 Freescale, the Freescale logo, AltiVec, C-5, CodeTEST, CodeWarrior, ColdFire, C-Ware, the
TM Stéphane Gervais-Ducouret Global Marketing Director Sensors stephane.gervais@freescale.com 6 th September 2012 Freescale, the Freescale logo, AltiVec, C-5, CodeTEST, CodeWarrior, ColdFire, C-Ware, the
Reference Design KL25-AGMP01 User Guide 10-Axis Data Logger Tool Kit
 Freescale Semiconductor Document Number: RDKL25AGMP01UG USER GUIDE Rev. 1.0, 9/2015 Reference Design KL25-AGMP01 User Guide 10-Axis Data Logger Tool Kit Contents 1 Getting Started... 2 1.1 Kit Contents...
Freescale Semiconductor Document Number: RDKL25AGMP01UG USER GUIDE Rev. 1.0, 9/2015 Reference Design KL25-AGMP01 User Guide 10-Axis Data Logger Tool Kit Contents 1 Getting Started... 2 1.1 Kit Contents...
BNO055 Xplained pro Getting Started Guide
 Application note BNO055 Xplained pro Getting Started Guide BNO055 Xplained pro: Getting Started Guide Document Revision 1.0 Document Release February 2015 Document Number BST-BNO055-AN011-00 Technical
Application note BNO055 Xplained pro Getting Started Guide BNO055 Xplained pro: Getting Started Guide Document Revision 1.0 Document Release February 2015 Document Number BST-BNO055-AN011-00 Technical
Product description for ED1600 generic Sigfox Module
 Product description for ED1600 generic Sigfox Module The ED1600 Sigfox Module is mainly developed for container tracking purposes. To avoid the development of many different types of modules and just as
Product description for ED1600 generic Sigfox Module The ED1600 Sigfox Module is mainly developed for container tracking purposes. To avoid the development of many different types of modules and just as
Arduino Uno. Power & Interface. Arduino Part 1. Introductory Medical Device Prototyping. Digital I/O Pins. Reset Button. USB Interface.
 Introductory Medical Device Prototyping Arduino Part 1, http://saliterman.umn.edu/ Department of Biomedical Engineering, University of Minnesota Arduino Uno Power & Interface Reset Button USB Interface
Introductory Medical Device Prototyping Arduino Part 1, http://saliterman.umn.edu/ Department of Biomedical Engineering, University of Minnesota Arduino Uno Power & Interface Reset Button USB Interface
Bonus Chapter 5 OVERVIEW WHAT S IN THIS CHAPTER?
 Bonus Chapter 5 WHAT S IN THIS CHAPTER? Using the camera Accessing geolocation information Using the MapControl Using sensors WROX.COM CODE DOWNLOADS FOR THIS CHAPTER The Wrox.com code downloads for this
Bonus Chapter 5 WHAT S IN THIS CHAPTER? Using the camera Accessing geolocation information Using the MapControl Using sensors WROX.COM CODE DOWNLOADS FOR THIS CHAPTER The Wrox.com code downloads for this
Testing the Possibilities of Using IMUs with Different Types of Movements
 137 Testing the Possibilities of Using IMUs with Different Types of Movements Kajánek, P. and Kopáčik A. Slovak University of Technology, Faculty of Civil Engineering, Radlinského 11, 81368 Bratislava,
137 Testing the Possibilities of Using IMUs with Different Types of Movements Kajánek, P. and Kopáčik A. Slovak University of Technology, Faculty of Civil Engineering, Radlinského 11, 81368 Bratislava,
Parallax LSM9DS1 9-axis IMU Module (#28065)
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical:support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical:support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Using Accelerometer in Windows 8* Metro Style App and a Case Study of Tap Detection
 Using Accelerometer in Windows 8* Metro Style App and a Case Study of Tap Detection Outlines 1. Introduction... 2 2. Accelerometer... 2 2.1. Capabilities... 2 2.2. Use cases... 3 3. Develop environment
Using Accelerometer in Windows 8* Metro Style App and a Case Study of Tap Detection Outlines 1. Introduction... 2 2. Accelerometer... 2 2.1. Capabilities... 2 2.2. Use cases... 3 3. Develop environment
Error Simulation and Multi-Sensor Data Fusion
 Error Simulation and Multi-Sensor Data Fusion AERO4701 Space Engineering 3 Week 6 Last Week Looked at the problem of attitude determination for satellites Examined several common methods such as inertial
Error Simulation and Multi-Sensor Data Fusion AERO4701 Space Engineering 3 Week 6 Last Week Looked at the problem of attitude determination for satellites Examined several common methods such as inertial
Motion Capture & Simulation
 Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
5/5/2016 Bluetooth Developer Studio Level 2 Profile Report PROFILE SERVICES. Generic Access - CHARACTERISTICS Device Name. Profile Name BBC MICROBIT
 5/5/2016 Bluetooth Developer Studio Level 2 Profile Report PROFILE Profile Name BBC MICROBIT Custom profile for the BBC micro:bit Version 1.9 27th April 2016 Added Nordic Semiconductor UART service Version
5/5/2016 Bluetooth Developer Studio Level 2 Profile Report PROFILE Profile Name BBC MICROBIT Custom profile for the BBC micro:bit Version 1.9 27th April 2016 Added Nordic Semiconductor UART service Version
Associate Professor Tao Gu, RMIT University, Australia INDOOR POSITIONING VIA SMARTPHONE SENSING
 Associate Professor Tao Gu, RMIT University, Australia INDOOR POSITIONING VIA SMARTPHONE SENSING Outline Indoor Localization using smartphone magnetometer Floor localization Localization in Metro Trains
Associate Professor Tao Gu, RMIT University, Australia INDOOR POSITIONING VIA SMARTPHONE SENSING Outline Indoor Localization using smartphone magnetometer Floor localization Localization in Metro Trains
Export Desktop Motion Analyzer profiles to Motion Analyzer Online: SolidWorks Motion Study Move Profile
 Export Desktop Motion Analyzer profiles to Motion Analyzer Online: SolidWorks Motion Study Move Profile For: Motion profiles with simple or static loads Splits motion profile into user defined number of
Export Desktop Motion Analyzer profiles to Motion Analyzer Online: SolidWorks Motion Study Move Profile For: Motion profiles with simple or static loads Splits motion profile into user defined number of
Orientation Capture of a Walker s Leg Using Inexpensive Inertial Sensors with Optimized Complementary Filter Design
 Orientation Capture of a Walker s Leg Using Inexpensive Inertial Sensors with Optimized Complementary Filter Design Sebastian Andersson School of Software Engineering Tongji University Shanghai, China
Orientation Capture of a Walker s Leg Using Inexpensive Inertial Sensors with Optimized Complementary Filter Design Sebastian Andersson School of Software Engineering Tongji University Shanghai, China
ECV ecompass Series. Technical Brief. Rev A. Page 1 of 8. Making Sense out of Motion
 Technical Brief The ECV ecompass Series provides stable azimuth, pitch, and roll measurements in dynamic conditions. An enhanced version of our ECG Series, the ECV includes a full suite of precision, 3-axis,
Technical Brief The ECV ecompass Series provides stable azimuth, pitch, and roll measurements in dynamic conditions. An enhanced version of our ECG Series, the ECV includes a full suite of precision, 3-axis,
Application Note: MatLab data processing for Motion Capture. Zhichao Lu Team 8 Documents Prep. Date: April 5, 2013
 Application Note: MatLab data processing for Motion Capture Zhichao Lu Team 8 Documents Prep. Date: April 5, 2013 Executive Summary This application note is a tutorial that guides users through how to
Application Note: MatLab data processing for Motion Capture Zhichao Lu Team 8 Documents Prep. Date: April 5, 2013 Executive Summary This application note is a tutorial that guides users through how to
STEALING PINS VIA MOBILE SENSORS: ACTUAL RISK VERSUS USER PERCEPTION
 STEALING PINS VIA MOBILE SENSORS: ACTUAL RISK VERSUS USER PERCEPTION Maryam Mehrnezhad Ehsan Toreini Siamak F. Shahandashti Feng Hao Newcastle University, UK At EuroUSEC, July 2016 JavaScript-based attack
STEALING PINS VIA MOBILE SENSORS: ACTUAL RISK VERSUS USER PERCEPTION Maryam Mehrnezhad Ehsan Toreini Siamak F. Shahandashti Feng Hao Newcastle University, UK At EuroUSEC, July 2016 JavaScript-based attack
UWP Working with Navigation
 UWP-019 - Working with Navigation Up until now we've only created apps with a single Page, the MainPage.XAML, and while that's fine for simple apps. However, it s likely that you will need to add additional
UWP-019 - Working with Navigation Up until now we've only created apps with a single Page, the MainPage.XAML, and while that's fine for simple apps. However, it s likely that you will need to add additional
Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors
 Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors Sriram Sethuraman Technologist & DMTS, Ittiam 1 Overview Imaging on Smart-phones
Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors Sriram Sethuraman Technologist & DMTS, Ittiam 1 Overview Imaging on Smart-phones
Accelerometer and Magnetometer Based Gyroscope Emulation on Smart Sensor for a Virtual Reality Application
 Accelerometer and Magnetometer Based Gyroscope Emulation on Smart Sensor for a Virtual Reality Application Baptiste Delporte, Laurent Perroton, Thierry Grandpierre, Jacques Trichet To cite this version:
Accelerometer and Magnetometer Based Gyroscope Emulation on Smart Sensor for a Virtual Reality Application Baptiste Delporte, Laurent Perroton, Thierry Grandpierre, Jacques Trichet To cite this version:
Using the MPU Inertia Measurement Systems Gyroscopes & Accelerometers Sensor fusion I2C MPU-6050
 Using the MPU-6050 Inertia Measurement Systems Gyroscopes & Accelerometers Sensor fusion I2C MPU-6050 IMUs There are small devices indicating changing orientation in smart phones, video game remotes, quad-copters,
Using the MPU-6050 Inertia Measurement Systems Gyroscopes & Accelerometers Sensor fusion I2C MPU-6050 IMUs There are small devices indicating changing orientation in smart phones, video game remotes, quad-copters,
Exploiting the gyroscope to update tilt measure and e-compass. Main components. inemo inertial module: 3D accelerometer and 3D
 DT0060 Design tip Exploiting the to update tilt measure and e-compass By Andrea Vitali Main components LSM6DS3 LSM6DS3H LSM6DS33 LSM6DS0 LSM330 Purpose and benefits This design tip explains how to exploit
DT0060 Design tip Exploiting the to update tilt measure and e-compass By Andrea Vitali Main components LSM6DS3 LSM6DS3H LSM6DS33 LSM6DS0 LSM330 Purpose and benefits This design tip explains how to exploit
Strapdown Inertial Navigation Technology
 Strapdown Inertial Navigation Technology 2nd Edition David Titterton and John Weston The Institution of Engineering and Technology Preface xv 1 Introduction 1 1.1 Navigation 1 1.2 Inertial navigation 2
Strapdown Inertial Navigation Technology 2nd Edition David Titterton and John Weston The Institution of Engineering and Technology Preface xv 1 Introduction 1 1.1 Navigation 1 1.2 Inertial navigation 2
INTEGRATED TECH FOR INDUSTRIAL POSITIONING
 INTEGRATED TECH FOR INDUSTRIAL POSITIONING Integrated Tech for Industrial Positioning aerospace.honeywell.com 1 Introduction We are the world leader in precision IMU technology and have built the majority
INTEGRATED TECH FOR INDUSTRIAL POSITIONING Integrated Tech for Industrial Positioning aerospace.honeywell.com 1 Introduction We are the world leader in precision IMU technology and have built the majority
WinMark Pro Application Note
 WinMark Pro Application Note App Note # 008c Page 1 of 8 WinMark Pro s Banner Tracking Functionality FH Flyer marking heads and Fenix Flyer Laser Markers running firmware version 2.70 or higher and working
WinMark Pro Application Note App Note # 008c Page 1 of 8 WinMark Pro s Banner Tracking Functionality FH Flyer marking heads and Fenix Flyer Laser Markers running firmware version 2.70 or higher and working
BNO055 Quick start guide
 BNO055 Quick start guide Bosch Sensortec Application note: BNO055 Quick start guide Document revision 1.0 Document release date Document number Mar.2015 BST-BNO055-AN007-00 Technical reference code 0 273
BNO055 Quick start guide Bosch Sensortec Application note: BNO055 Quick start guide Document revision 1.0 Document release date Document number Mar.2015 BST-BNO055-AN007-00 Technical reference code 0 273
TINY System Ultra-Low Power Sensor Hub for Always-on Context Features
 TINY System Ultra-Low Power Sensor Hub for Always-on Context Features MediaTek White Paper June 2015 MediaTek s sensor hub solution, powered by the TINY Stem low power architecture, supports always-on
TINY System Ultra-Low Power Sensor Hub for Always-on Context Features MediaTek White Paper June 2015 MediaTek s sensor hub solution, powered by the TINY Stem low power architecture, supports always-on
ROBOTICS AND AUTONOMOUS SYSTEMS
 ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 6 PERCEPTION/ODOMETRY comp329-2013-parsons-lect06 2/43 Today We ll talk about perception and
ROBOTICS AND AUTONOMOUS SYSTEMS Simon Parsons Department of Computer Science University of Liverpool LECTURE 6 PERCEPTION/ODOMETRY comp329-2013-parsons-lect06 2/43 Today We ll talk about perception and
Inertial Navigation Static Calibration
 INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2018, VOL. 64, NO. 2, PP. 243 248 Manuscript received December 2, 2017; revised April, 2018. DOI: 10.24425/119518 Inertial Navigation Static Calibration
INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2018, VOL. 64, NO. 2, PP. 243 248 Manuscript received December 2, 2017; revised April, 2018. DOI: 10.24425/119518 Inertial Navigation Static Calibration
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Navigational Aids 1 st Semester/2007/TF 7:30 PM -9:00 PM
 Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
Embedded Motion Driver Tutorial
 InvenSense Inc. 1197 Borregas Ave., Sunnyvale, CA 94089 U.S.A. Tel: +1 (408) 988-7339 Fax: +1 (408) 988-8104 Website: www.invensense.com Embedded Motion Driver 5.1.1 Tutorial A printed copy of this document
InvenSense Inc. 1197 Borregas Ave., Sunnyvale, CA 94089 U.S.A. Tel: +1 (408) 988-7339 Fax: +1 (408) 988-8104 Website: www.invensense.com Embedded Motion Driver 5.1.1 Tutorial A printed copy of this document