Lecture 22 of 41. Animation 2 of 3: Rotations, Quaternions Dynamics & Kinematics
|
|
|
- Claude Nelson
- 5 years ago
- Views:
Transcription
1 Animation 2 of 3: Rotations, Quaternions Dynamics & Kinematics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: / Public mirror web site: Instructor home page: Readings: Today: Chapter 17, esp , Eberly 2 e see Next class: Chapter 10, 13, , Eberly 2 e Ross s Maya tutorials: PolyFacecom s Maya character modeling tutorials: Wikipedia, Flight Dynamics:
2 2 Lecture Outline Reading for Last Class: Eberly 2 e (736), Flash handout Reading for Today: , Eberly 2 e Reading for Next Class: Chapter 10, 13, , Eberly 2 e Previously: Evaluators, Piecewise Polynomial Curves, Bicubic Surfaces Last Time: Maya & Animation Preliminaries Ross Tutorials Maya interface: navigation, menus, tools, primitives Ross tutorials ( Preview of character models: PolyFacecom ( Today: Rotations in Animation Flight dynamics: roll, pitch, yaw Matrix, angles (fixed, Euler, axis), quaternions, exponential maps Dynamics: forward (trajectories, simulation), inverse ( e.g., ballistics) Kinematics: forward, inverse Next Time: Videos Part 4 Modeling & Simulation

3 3 Where We Are



4 4 References: Maya Character Rigging Aaron Ross Founder, Digital Arts Guild Jim Lammers President Trinity Animation Larry Neuberger Associate Professor, Alfred State SUNY College of Technology Online Instructor, Art Institute of Pittsburgh




5 5 Acknowledgements: CGA Rotations, Dynamics & Kinematics Rick Parent Professor Department of Computer Science and Engineering Ohio State University David C. Brogan Visiting Assistant Professor, Computer Science Department, University of Virginia Susquehanna International Group (SIG) Steve Rotenberg Visiting Lecturer Graphics Lab University of California San Diego CEO/Chief Scientist, PixelActive

6 6 Spaces & Transformations

7 7 Display Pipeline
![8 Rotations [1]: Orientation Adapted from slides 2004 2005 S.](/docs-images/90/104357795/images/8-1.jpg "Rotenberg, UCSD CSE169: Computer Animation, Winter 2005, http://bit.")
8 8 Rotations [1]: Orientation Adapted from slides S. Rotenberg, UCSD CSE169: Computer Animation, Winter 2005,
![9 Rotations [2]: Representing Position Adapted from slides 2004 2005 S.](/docs-images/90/104357795/images/9-1.jpg "Rotenberg, UCSD CSE169: Computer Animation, Winter 2005, http://bit.")
9 9 Rotations [2]: Representing Position Adapted from slides S. Rotenberg, UCSD CSE169: Computer Animation, Winter 2005,
![10 Rotations [3]: Euler s Theorem Adapted from slides 2004 2005 S.](/docs-images/90/104357795/images/10-1.jpg "Rotenberg, UCSD CSE169: Computer Animation, Winter 2005, http://bit.")
10 10 Rotations [3]: Euler s Theorem Adapted from slides S. Rotenberg, UCSD CSE169: Computer Animation, Winter 2005,
![11 Rotations [4]: Euler Angles Adapted from slides 2004 2005 S.](/docs-images/90/104357795/images/11-1.jpg "Rotenberg, UCSD CSE169: Computer Animation, Winter 2005, http://bit.")
11 11 Rotations [4]: Euler Angles Adapted from slides S. Rotenberg, UCSD CSE169: Computer Animation, Winter 2005,

12 12 Representing Orientations

13 13 Working with Fixed Angles & Rotation Matrices (RMs)
14 14 Transformations in Pipeline
15 15 Error Considerations

16 16 Six Ways to Represent Orientations

17 17 Representing 3 Rotational Degrees of Freedom (DOFs) Adapted from slides D. Brogan, University of Virginia CS 445/645,,

18 18 Method 1 Transformation Matrix [1] 4 4 Homogeneous TMs

19 19 Method 1 Transformation Matrix [2]: Translation
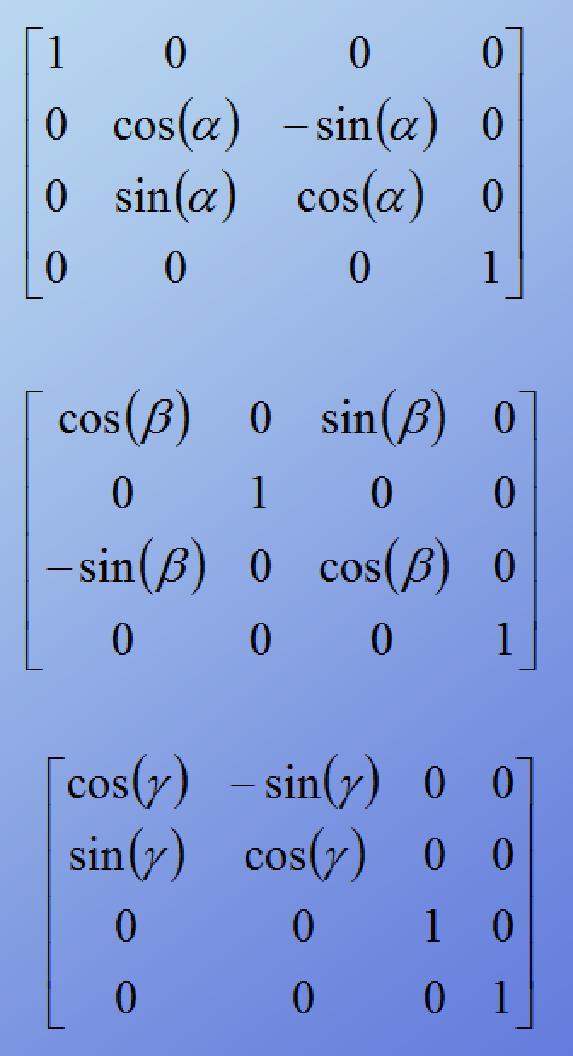





20 20 Method 1 Transformation Matrix [3]: Rotation about x, y, z Rotation about x axis (Roll) x Rotation about y axis (Pitch) 2006 Wikipedia, Flight Dynamics y z Rotation about z axis (Yaw)

21 21 Method 2 Fixed Angles [1]
22 22 Method 2 Fixed Angles [2]: Gimbal Lock

23 23 Method 2 Fixed Angles [3]: Order of Rotations

24 24 Method 2 Fixed Angles [4]: Interpolating Fixed Angles
![25 Method 2 Fixed Angles [5]: Gimbal Lock Illustrated Gimbal Lock: Term Derived from Mechanical Problem in Gimbal Gimbal: Mechanism That Supports Compass, Gyroscope Anticz.com 2001 M.](/docs-images/90/104357795/images/25-1.jpg "Brown http://bit.ly/6nixvr Gimbal Lock 2006 Wikipedia (Rendered using POV-Ray) http://bit.ly/hr88v2 Adapted from slides 2000 2005 D.")
25 25 Method 2 Fixed Angles [5]: Gimbal Lock Illustrated Gimbal Lock: Term Derived from Mechanical Problem in Gimbal Gimbal: Mechanism That Supports Compass, Gyroscope Anticz.com 2001 M. Brown Gimbal Lock 2006 Wikipedia (Rendered using POV-Ray) Adapted from slides D. Brogan, University of Virginia CS 551, Computer Animation,

26 26 Method 3 Euler Angles [1]
![27 Method 3 Euler Angles [2] Adapted from slides 2000 2004 D.](/docs-images/90/104357795/images/27-1.jpg "Brogan, University of Virginia CS 445/645,, http://bit.")
27 27 Method 3 Euler Angles [2] Adapted from slides D. Brogan, University of Virginia CS 445/645,,

28 28 Method 4 Axis-Angle [1]
![29 Method 4 Axis-Angle [2] Given r vector in space to rotate n unit-length axis in space about which to rotate amount about n to](/docs-images/90/104357795/images/29-1.jpg "rotate Solve r rotated vector n r r Adapted from slides 2000 2004 D. Brogan, University of Virginia CS 445/645,, http://bit.")
29 29 Method 4 Axis-Angle [2] Given r vector in space to rotate n unit-length axis in space about which to rotate amount about n to rotate Solve r rotated vector n r r Adapted from slides D. Brogan, University of Virginia CS 445/645,,
![30 Method 4 Axis-Angle [3]:](/docs-images/90/104357795/images/30-1.jpg "Axis-Angle to Series of")
30 30 Method 4 Axis-Angle [3]: Axis-Angle to Series of Rotations
![31 Method 4 Axis-Angle [4]:](/docs-images/90/104357795/images/31-1.jpg "Axis-Angle to Rotation")
31 31 Method 4 Axis-Angle [4]: Axis-Angle to Rotation Matrix

32 32 Method 5 Quaternions [1]

33 33 Method 5 Quaternions [2]: Arithmetic

34 34 Method 5 Quaternions [3]: Inverse & Normalization
35 35 Method 5 Quaternions [4]: Representation

36 36 Method 5 Quaternions [5]: Geometric Operations

37 37 Method 5 Quaternions [6]: Unit Quaternion Conversions

38 38 Method 5 Quaternions [7]: Properties

39 39 Method 6 Exponential Maps Original paper, Journal of Graphics Tools: Grassia (1998), Wikipedia: Exponential Map, Wikipedia: Rotation Matrix,
![40 Quaternions [1]: Matrix to Quaternion Adapted from slides 2004 2005 S.](/docs-images/90/104357795/images/40-1.jpg "Rotenberg, UCSD CSE169: Computer Animation, Winter 2005, http://bit.")
40 40 Quaternions [1]: Matrix to Quaternion Adapted from slides S. Rotenberg, UCSD CSE169: Computer Animation, Winter 2005,
![41 Quaternions [2]: Axis-Angle to Quaternion Adapted from slides 2004 2005 S.](/docs-images/90/104357795/images/41-1.jpg "Rotenberg, UCSD CSE169: Computer Animation, Winter 2005, http://bit.ly/f0vian")
41 41 Quaternions [2]: Axis-Angle to Quaternion Adapted from slides S. Rotenberg, UCSD CSE169: Computer Animation, Winter 2005,

42 42 Dynamics & Kinematics Dynamics: Study of Motion & Changes in Motion Forward: model forces over time to find state, e.g., Given: initial position p 0, velocity v 0, gravitational constants Calculate: position p t at time t Inverse: given state and constraints, calculate forces, e.g., Given: desired position p t at time t, gravitational constants Calculate: position p 0, velocity v 0 needed Wikipedia: (see also: Analytical dynamics ) For non-particle objects: rigid-body dynamics ( Kinematics: Study of Motion without Regard to Causative Forces Modeling systems e.g., articulated figure Forward: from angles to position ( Inverse: finding angles given desired position ( Wikipedia: Forward Kinematics 2009 Wikipedia
43 43 Summary Reading for Next Class: Chapter 10, 13, , Eberly 2 e Last Time: Maya & CGA, Ross Tutorials ( Maya interface: navigation, menus, tools, primitives GUI, viewports, transforms, nodes, attributes, deformers, scenes Object modeling and rigging; driven keys, blend shape Today: Rotations in Animation Flight dynamics: roll, pitch, yaw Matrix, angles (fixed, Euler, axis), quaternions, exponential maps Dynamics: forward (trajectories, simulation), inverse ( e.g., ballistics) Kinematics: forward, inverse Previous Videos (#3): Morphing & Other Special Effects (SFX) Next Set of Videos (#4): Modeling & Simulation Next Class: Animation for Simulation, Visualization Lab 4: Unreal Wiki Tutorial, Modeling/Rigging (
44 44 Terminology Maya Software for 3-D Modeling & Animation Shelves and hotkeys, viewports Channel box, deformers controlling complex vertex meshes Rigging Character Models: Defining Components of Articulated Figure Joints axis of rotation, angular degree(s) of freedom (DOFs) Bones attached to joints, rotate about joint axis Dynamics (Motion under Forces) vs. Kinematics (Articulated Motion) Roll (Rotation about x), Pitch (Rotation about y), Yaw (Rotation about z) Today: Six Degrees of Rotation Matrix what we studied before: 4 4 Homogeneous TMs Fixed angles global basis Euler angles rotate around local axes (themselves rotated) Axis-angle rotate around arbitrary axis Quaternions different representation of arbitrary rotation Exponential maps 3-D representation related to quaternions
Lecture 22 of 41. Animation 2 of 3: Rotations, Quaternions Dynamics & Kinematics
 Animation 2 of 3: Rotations, Quaternions Dynamics & Kinematics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Animation 2 of 3: Rotations, Quaternions Dynamics & Kinematics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Lecture 21 of 41. Animation Basics Lab 4: Modeling & Rigging in Maya
 Animation Basics Lab 4: Modeling & Rigging in Maya William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror web
Animation Basics Lab 4: Modeling & Rigging in Maya William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror web
Lecture 24 of 41. Collision Handling Part 1 of 2: Separating Axes, Oriented Bounding Boxes
 Collision Handling Part 1 of 2: Separating Axes, Oriented Bounding Boxes William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre
Collision Handling Part 1 of 2: Separating Axes, Oriented Bounding Boxes William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre
Lecture 30 of 41. Animation 3 of 3: Inverse Kinematics Control & Ragdoll Physics
 Animation 3 of 3: Inverse Kinematics Control & Ragdoll Physics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Animation 3 of 3: Inverse Kinematics Control & Ragdoll Physics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Lecture 30 of 41. Animation 3 of 3: Inverse Kinematics Control & Ragdoll Physics
 Animation 3 of 3: Inverse Kinematics Control & Ragdoll Physics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Animation 3 of 3: Inverse Kinematics Control & Ragdoll Physics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Lecture 25 of 41. Spatial Sorting: Binary Space Partitioning Quadtrees & Octrees
 Spatial Sorting: Binary Space Partitioning Quadtrees & Octrees William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Spatial Sorting: Binary Space Partitioning Quadtrees & Octrees William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Lecture 18 of 41. Scene Graphs: Rendering Lab 3b: Shader
 Scene Graphs: Rendering Lab 3b: Shader William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror web site: http://www.kddresearch.org/courses/cis636
Scene Graphs: Rendering Lab 3b: Shader William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror web site: http://www.kddresearch.org/courses/cis636
Lecture 6 of 41. Scan Conversion 1 of 2: Midpoint Algorithm for Lines and Ellipses
 Scan Conversion 1 of 2: Midpoint Algorithm for Lines and Ellipses William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Scan Conversion 1 of 2: Midpoint Algorithm for Lines and Ellipses William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Lecture 6 of 41. Scan Conversion 1 of 2: Midpoint Algorithm for Lines and Ellipses
 Scan Conversion 1 of 2: Midpoint Algorithm for Lines and Ellipses William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Scan Conversion 1 of 2: Midpoint Algorithm for Lines and Ellipses William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Animation. Keyframe animation. CS4620/5620: Lecture 30. Rigid motion: the simplest deformation. Controlling shape for animation
 Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Lecture 7 of 41. Viewing 4 of 4: Culling and Clipping Lab 1b: Flash Intro
 Viewing 4 of 4: Culling and Clipping Lab 1b: Flash Intro William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror
Viewing 4 of 4: Culling and Clipping Lab 1b: Flash Intro William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror
Quaternions and Rotations
 CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
Animation. CS 4620 Lecture 32. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Animations. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Kavita Bala
 Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Quaternions and Rotations
 CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
Geometric transformations in 3D and coordinate frames. Computer Graphics CSE 167 Lecture 3
 Geometric transformations in 3D and coordinate frames Computer Graphics CSE 167 Lecture 3 CSE 167: Computer Graphics 3D points as vectors Geometric transformations in 3D Coordinate frames CSE 167, Winter
Geometric transformations in 3D and coordinate frames Computer Graphics CSE 167 Lecture 3 CSE 167: Computer Graphics 3D points as vectors Geometric transformations in 3D Coordinate frames CSE 167, Winter
IMAGE-BASED RENDERING AND ANIMATION
 DH2323 DGI17 INTRODUCTION TO COMPUTER GRAPHICS AND INTERACTION IMAGE-BASED RENDERING AND ANIMATION Christopher Peters CST, KTH Royal Institute of Technology, Sweden chpeters@kth.se http://kth.academia.edu/christopheredwardpeters
DH2323 DGI17 INTRODUCTION TO COMPUTER GRAPHICS AND INTERACTION IMAGE-BASED RENDERING AND ANIMATION Christopher Peters CST, KTH Royal Institute of Technology, Sweden chpeters@kth.se http://kth.academia.edu/christopheredwardpeters
Geometric Transformations
 Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
For each question, indicate whether the statement is true or false by circling T or F, respectively.
 True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
3D Transformations. CS 4620 Lecture Kavita Bala w/ prior instructor Steve Marschner. Cornell CS4620 Fall 2015 Lecture 11
 3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Lecture 31of 41. Ray Tracing, Part 1 of 2: Intersections, Ray Trees & Recursion
 Lecture 31of 41 Ray Tracing, Part 1 of 2: Intersections, Ray Trees & Recursion William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre
Lecture 31of 41 Ray Tracing, Part 1 of 2: Intersections, Ray Trees & Recursion William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre
Lecture 31of 41. Ray Tracing, Part 1 of 2: Intersections, Ray Trees & Recursion
 Lecture 31of 41 Ray Tracing, Part 1 of 2: Intersections, Ray Trees & Recursion William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre
Lecture 31of 41 Ray Tracing, Part 1 of 2: Intersections, Ray Trees & Recursion William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
1 Transformations. Chapter 1. Transformations. Department of Computer Science and Engineering 1-1
 Transformations 1-1 Transformations are used within the entire viewing pipeline: Projection from world to view coordinate system View modifications: Panning Zooming Rotation 1-2 Transformations can also
Transformations 1-1 Transformations are used within the entire viewing pipeline: Projection from world to view coordinate system View modifications: Panning Zooming Rotation 1-2 Transformations can also
Quaternions and Rotations
 CSCI 420 Computer Graphics Lecture 20 and Rotations Rotations Motion Capture [Angel Ch. 3.14] Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera parameters
CSCI 420 Computer Graphics Lecture 20 and Rotations Rotations Motion Capture [Angel Ch. 3.14] Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera parameters
Lecture 32 of 41. Lab 6: Ray Tracing with ACM SIGGRAPH Demo & POV-Ray
 Lab 6: Ray Tracing with ACM SIGGRAPH Demo & POV-Ray William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror web
Lab 6: Ray Tracing with ACM SIGGRAPH Demo & POV-Ray William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror web
3D Transformations. CS 4620 Lecture 10. Cornell CS4620 Fall 2014 Lecture Steve Marschner (with previous instructors James/Bala)
") 3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
Lecture 16 of 41. Transparency, Painter s Algorithm, & Z-Buffer Lab 3a: Shading & Transparency
 Transparency, Painter s Algorithm, & Z-Buffer Lab 3a: Shading & Transparency William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre
Transparency, Painter s Algorithm, & Z-Buffer Lab 3a: Shading & Transparency William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre
Quaternions and Rotations
 CSCI 480 Computer Graphics Lecture 20 and Rotations April 6, 2011 Jernej Barbic Rotations Motion Capture [Ch. 4.12] University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s11/ 1 Rotations
CSCI 480 Computer Graphics Lecture 20 and Rotations April 6, 2011 Jernej Barbic Rotations Motion Capture [Ch. 4.12] University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s11/ 1 Rotations
Computer Animation. Algorithms and Techniques. z< MORGAN KAUFMANN PUBLISHERS. Rick Parent Ohio State University AN IMPRINT OF ELSEVIER SCIENCE
 Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Kinematics and Orientations
 Kinematics and Orientations Hierarchies Forward Kinematics Transformations (review) Euler angles Quaternions Yaw and evaluation function for assignment 2 Building a character Just translate, rotate, and
Kinematics and Orientations Hierarchies Forward Kinematics Transformations (review) Euler angles Quaternions Yaw and evaluation function for assignment 2 Building a character Just translate, rotate, and
12.1 Quaternions and Rotations
 Fall 2015 CSCI 420 Computer Graphics 12.1 Quaternions and Rotations Hao Li http://cs420.hao-li.com 1 Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera
Fall 2015 CSCI 420 Computer Graphics 12.1 Quaternions and Rotations Hao Li http://cs420.hao-li.com 1 Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Transformation. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
Inertial Measurement Units II!
 ! Inertial Measurement Units II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 10! stanford.edu/class/ee267/!! wikipedia! Polynesian Migration! Lecture Overview! short review of
! Inertial Measurement Units II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 10! stanford.edu/class/ee267/!! wikipedia! Polynesian Migration! Lecture Overview! short review of
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018
 CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018") Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO F ^ k.^
 Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Animation. CS 465 Lecture 22
 Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Game Programming. Bing-Yu Chen National Taiwan University
 Game Programming Bing-Yu Chen National Taiwan University Character Motion Hierarchical Modeling Character Animation Motion Editing 1 Hierarchical Modeling Connected primitives 2 3D Example: A robot arm
Game Programming Bing-Yu Chen National Taiwan University Character Motion Hierarchical Modeling Character Animation Motion Editing 1 Hierarchical Modeling Connected primitives 2 3D Example: A robot arm
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Trajectory Planning for Automatic Machines and Robots
 Luigi Biagiotti Claudio Melchiorri Trajectory Planning for Automatic Machines and Robots Springer 1 Trajectory Planning 1 1.1 A General Overview on Trajectory Planning 1 1.2 One-dimensional Trajectories
Luigi Biagiotti Claudio Melchiorri Trajectory Planning for Automatic Machines and Robots Springer 1 Trajectory Planning 1 1.1 A General Overview on Trajectory Planning 1 1.2 One-dimensional Trajectories
3D Transformations World Window to Viewport Transformation Week 2, Lecture 4
 CS 430/536 Computer Graphics I 3D Transformations World Window to Viewport Transformation Week 2, Lecture 4 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory
CS 430/536 Computer Graphics I 3D Transformations World Window to Viewport Transformation Week 2, Lecture 4 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory
Quaternions & Rotation in 3D Space
 Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
Animation. Computer Graphics COMP 770 (236) Spring Instructor: Brandon Lloyd 4/23/07 1
 Spring Instructor: Brandon Lloyd 4/23/07 1") Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
3D Modelling: Animation Fundamentals & Unit Quaternions
 3D Modelling: Animation Fundamentals & Unit Quaternions CITS3003 Graphics & Animation Thanks to both Richard McKenna and Marco Gillies for permission to use their slides as a base. Static objects are boring
3D Modelling: Animation Fundamentals & Unit Quaternions CITS3003 Graphics & Animation Thanks to both Richard McKenna and Marco Gillies for permission to use their slides as a base. Static objects are boring
CS354 Computer Graphics Rotations and Quaternions
 Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Rigging / Skinning. based on Taku Komura, Jehee Lee and Charles B.Own's slides
 Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Lecture 15 of 41. Scene Graphs: State Videos 1: CGA Shorts, Demos
 Scene Graphs: State Videos 1: CGA Shorts, Demos William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror web site:
Scene Graphs: State Videos 1: CGA Shorts, Demos William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror web site:
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Lecture 11of 41. Surface Detail 2 of 5: Textures OpenGL Shading
 Lecture 11of 41 Surface Detail 2 of 5: Textures OpenGL Shading William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Lecture 11of 41 Surface Detail 2 of 5: Textures OpenGL Shading William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Transformations Week 9, Lecture 18
 CS 536 Computer Graphics Transformations Week 9, Lecture 18 2D Transformations David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 3 2D Affine Transformations
CS 536 Computer Graphics Transformations Week 9, Lecture 18 2D Transformations David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 3 2D Affine Transformations
Advanced Graphics and Animation
 Advanced Graphics and Animation Character Marco Gillies and Dan Jones Goldsmiths Aims and objectives By the end of the lecture you will be able to describe How 3D characters are animated Skeletal animation
Advanced Graphics and Animation Character Marco Gillies and Dan Jones Goldsmiths Aims and objectives By the end of the lecture you will be able to describe How 3D characters are animated Skeletal animation
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis
 Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Motivation. Parametric Curves (later Surfaces) Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)
 Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)") Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Jorg s Graphics Lecture Notes Coordinate Spaces 1
 Jorg s Graphics Lecture Notes Coordinate Spaces Coordinate Spaces Computer Graphics: Objects are rendered in the Euclidean Plane. However, the computational space is better viewed as one of Affine Space
Jorg s Graphics Lecture Notes Coordinate Spaces Coordinate Spaces Computer Graphics: Objects are rendered in the Euclidean Plane. However, the computational space is better viewed as one of Affine Space
CS 445 / 645 Introduction to Computer Graphics. Lecture 21 Representing Rotations
 CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Advanced Computer Graphics Transformations. Matthias Teschner
 Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Computer Animation II
 Computer Animation II Orientation interpolation Dynamics Some slides courtesy of Leonard McMillan and Jovan Popovic Lecture 13 6.837 Fall 2002 Interpolation Review from Thursday Splines Articulated bodies
Computer Animation II Orientation interpolation Dynamics Some slides courtesy of Leonard McMillan and Jovan Popovic Lecture 13 6.837 Fall 2002 Interpolation Review from Thursday Splines Articulated bodies
Articulated Characters
 Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Character animation Christian Miller CS Fall 2011
 Character animation Christian Miller CS 354 - Fall 2011 Exam 2 grades Avg = 74.4, std. dev. = 14.4, min = 42, max = 99 Characters Everything is important in an animation But people are especially sensitive
Character animation Christian Miller CS 354 - Fall 2011 Exam 2 grades Avg = 74.4, std. dev. = 14.4, min = 42, max = 99 Characters Everything is important in an animation But people are especially sensitive
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
Chapter 3 : Computer Animation
 Chapter 3 : Computer Animation Histor First animation films (Disne) 30 drawings / second animator in chief : ke frames others : secondar drawings Use the computer to interpolate? positions orientations
Chapter 3 : Computer Animation Histor First animation films (Disne) 30 drawings / second animator in chief : ke frames others : secondar drawings Use the computer to interpolate? positions orientations
animation computer graphics animation 2009 fabio pellacini 1
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
MODELING AND HIERARCHY
 MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
SM2231 :: 3D Animation I :: Basic. Rigging
 SM2231 :: 3D Animation I :: Basic Rigging Object arrangements Hierarchical Hierarchical Separate parts arranged in a hierarchy can be animated without a skeleton Flat Flat Flat hierarchy is usually preferred,
SM2231 :: 3D Animation I :: Basic Rigging Object arrangements Hierarchical Hierarchical Separate parts arranged in a hierarchy can be animated without a skeleton Flat Flat Flat hierarchy is usually preferred,
To Do. History of Computer Animation. These Lectures. 2D and 3D Animation. Computer Animation. Foundations of Computer Graphics (Spring 2010)
") Foundations of Computer Graphics (Spring 2010) CS 184, Lecture 24: Animation http://inst.eecs.berkeley.edu/~cs184 To Do Submit HW 4 (today) Start working on HW 5 (can be simple add-on) Many slides courtesy
Foundations of Computer Graphics (Spring 2010) CS 184, Lecture 24: Animation http://inst.eecs.berkeley.edu/~cs184 To Do Submit HW 4 (today) Start working on HW 5 (can be simple add-on) Many slides courtesy
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
2D/3D Geometric Transformations and Scene Graphs
 2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
Lab 2A Finding Position and Interpolation with Quaternions
 Lab 2A Finding Position and Interpolation with Quaternions In this Lab we will learn how to use the RVIZ Robot Simulator, Python Programming Interpreter and ROS tf library to study Quaternion math. There
Lab 2A Finding Position and Interpolation with Quaternions In this Lab we will learn how to use the RVIZ Robot Simulator, Python Programming Interpreter and ROS tf library to study Quaternion math. There
Lecture 4 of 41. Lab 1a: OpenGL Basics
 Lab 1a: OpenGL Basics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://snipurl.com/1y5gc Course web site: http://www.kddresearch.org/courses/cis636 Instructor
Lab 1a: OpenGL Basics William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://snipurl.com/1y5gc Course web site: http://www.kddresearch.org/courses/cis636 Instructor
Animation. Motion over time
 Animation Animation Motion over time Animation Motion over time Usually focus on character animation but environment is often also animated trees, water, fire, explosions, Animation Motion over time Usually
Animation Animation Motion over time Animation Motion over time Usually focus on character animation but environment is often also animated trees, water, fire, explosions, Animation Motion over time Usually
Math background. 2D Geometric Transformations. Implicit representations. Explicit representations. Read: CS 4620 Lecture 6
 Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
CS-184: Computer Graphics. Today. Forward kinematics Inverse kinematics. Wednesday, November 12, Pin joints Ball joints Prismatic joints
 CS-184: Computer Graphics Lecture #18: Forward and Prof. James O Brien University of California, Berkeley V2008-F-18-1.0 1 Today Forward kinematics Inverse kinematics Pin joints Ball joints Prismatic joints
CS-184: Computer Graphics Lecture #18: Forward and Prof. James O Brien University of California, Berkeley V2008-F-18-1.0 1 Today Forward kinematics Inverse kinematics Pin joints Ball joints Prismatic joints
Game Mathematics. (12 Week Lesson Plan)
") Game Mathematics (12 Week Lesson Plan) Lesson 1: Set Theory Textbook: Chapter One (pgs. 1 15) We begin the course by introducing the student to a new vocabulary and set of rules that will be foundational
Game Mathematics (12 Week Lesson Plan) Lesson 1: Set Theory Textbook: Chapter One (pgs. 1 15) We begin the course by introducing the student to a new vocabulary and set of rules that will be foundational
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
CIS 536/636 Introduction to Computer Graphics. Kansas State University. CIS 536/636 Introduction to Computer Graphics
 2 Lecture Outline Surface Detail 3 of 5: Mappings OpenGL Textures William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
2 Lecture Outline Surface Detail 3 of 5: Mappings OpenGL Textures William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics. Velocity Interpolation. Handing Free Surface with MAC
 Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Prof. Fanny Ficuciello Robotics for Bioengineering Trajectory planning
 Trajectory planning to generate the reference inputs to the motion control system which ensures that the manipulator executes the planned trajectories path and trajectory joint space trajectories operational
Trajectory planning to generate the reference inputs to the motion control system which ensures that the manipulator executes the planned trajectories path and trajectory joint space trajectories operational
6.837 Introduction to Computer Graphics Quiz 2 Thursday November 20, :40-4pm One hand-written sheet of notes allowed
 6.837 Introduction to Computer Graphics Quiz 2 Thursday November 20, 2003 2:40-4pm One hand-written sheet of notes allowed Name: 1 2 3 4 5 6 7 / 4 / 15 / 5 / 5 / 12 / 2 / 7 Total / 50 1 Animation [ /4]
6.837 Introduction to Computer Graphics Quiz 2 Thursday November 20, 2003 2:40-4pm One hand-written sheet of notes allowed Name: 1 2 3 4 5 6 7 / 4 / 15 / 5 / 5 / 12 / 2 / 7 Total / 50 1 Animation [ /4]
COMP371 COMPUTER GRAPHICS
 COMP371 COMPUTER GRAPHICS SESSION 21 KEYFRAME ANIMATION 1 Lecture Overview Review of last class Next week Quiz #2 Project presentations rubric Today Keyframe Animation Programming Assignment #3 solution
COMP371 COMPUTER GRAPHICS SESSION 21 KEYFRAME ANIMATION 1 Lecture Overview Review of last class Next week Quiz #2 Project presentations rubric Today Keyframe Animation Programming Assignment #3 solution
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
CS 775: Advanced Computer Graphics. Lecture 3 : Kinematics
 CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Lecture 26 of 41. Picking Videos 5: More CGA
 Picking Videos 5: More CGA William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror web site: http://www.kddresearch.org/courses/cis636
Picking Videos 5: More CGA William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public mirror web site: http://www.kddresearch.org/courses/cis636
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Quaternion to Euler Angle Conversion for Arbitrary Rotation Sequence Using Geometric Methods
 uaternion to Euler Angle Conversion for Arbitrary Rotation Sequence Using Geometric Methods ê = normalized Euler ation axis i Noel H. Hughes Nomenclature = indices of first, second and third Euler
uaternion to Euler Angle Conversion for Arbitrary Rotation Sequence Using Geometric Methods ê = normalized Euler ation axis i Noel H. Hughes Nomenclature = indices of first, second and third Euler
Lecture 0 of 41: Part B Course Content. Advanced Computer Graphics: Course Organization and Survey
 Lecture 0 of 41: Part B Course Content : Course Organization and Survey William H. Hsu Department of Computing and Information Sciences, KSU KSOL course page: Course web site: http://www.kddresearch.org/courses/cis736
Lecture 0 of 41: Part B Course Content : Course Organization and Survey William H. Hsu Department of Computing and Information Sciences, KSU KSOL course page: Course web site: http://www.kddresearch.org/courses/cis736
Course Review. Computer Animation and Visualisation. Taku Komura
 Course Review Computer Animation and Visualisation Taku Komura Characters include Human models Virtual characters Animal models Representation of postures The body has a hierarchical structure Many types
Course Review Computer Animation and Visualisation Taku Komura Characters include Human models Virtual characters Animal models Representation of postures The body has a hierarchical structure Many types
CSE452 Computer Graphics
 CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
COMP 175 COMPUTER GRAPHICS. Lecture 10: Animation. COMP 175: Computer Graphics March 12, Erik Anderson 08 Animation
 Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
To Do. Advanced Computer Graphics. The Story So Far. Course Outline. Rendering (Creating, shading images from geometry, lighting, materials)
") Advanced Computer Graphics CSE 190 [Spring 2015], Lecture 16 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 3 milestone due May 29 Should already be well on way Contact us for difficulties
Advanced Computer Graphics CSE 190 [Spring 2015], Lecture 16 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 3 milestone due May 29 Should already be well on way Contact us for difficulties
Course Outline. Advanced Computer Graphics. Animation. The Story So Far. Animation. To Do
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 18 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir 3D Graphics Pipeline Modeling (Creating 3D Geometry) Course Outline Rendering (Creating, shading
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 18 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir 3D Graphics Pipeline Modeling (Creating 3D Geometry) Course Outline Rendering (Creating, shading
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
CSE 682: Animation. Winter Jeff Walsh, Stephen Warton, Brandon Rockwell, Dustin Hoffman
 CSE 682: Animation Winter 2012 Jeff Walsh, Stephen Warton, Brandon Rockwell, Dustin Hoffman Topics: Path animation Camera animation Keys and the graph editor Driven keys Expressions Particle systems Animating
CSE 682: Animation Winter 2012 Jeff Walsh, Stephen Warton, Brandon Rockwell, Dustin Hoffman Topics: Path animation Camera animation Keys and the graph editor Driven keys Expressions Particle systems Animating
CS 775: Advanced Computer Graphics. Lecture 4: Skinning
 CS 775: Advanced Computer Graphics Lecture 4: http://www.okino.com/conv/skinning.htm Binding Binding Always done in a standard rest or bind pose. Binding Always done in a standard rest or bind pose. Associate
CS 775: Advanced Computer Graphics Lecture 4: http://www.okino.com/conv/skinning.htm Binding Binding Always done in a standard rest or bind pose. Binding Always done in a standard rest or bind pose. Associate