GPU Accelerating Speeded-Up Robust Features Timothy B. Terriberry, Lindley M. French, and John Helmsen
|
|
|
- Dale Clark
- 5 years ago
- Views:
Transcription

1 GPU Accelerating Speeded-Up Robust Features Timothy B. Terriberry, Lindley M. French, and John Helmsen
2 Overview of ArgonST Manufacturer of integrated sensor hardware and sensor analysis systems 2 RF, COMINT, ELINT, EO/IR, LIDAR, Multispectral, Hyperspectral, Acoustic Research Group Focus Artificial Intelligence and Machine Learning Automated Scene Understanding Visual Navigation


3 Au COIN Project 3 Automated Understanding via Collective Image Navigation Advanced, ultra-tight coupling methods for visual navigation Partnered with the Air Force Institute of Technology This research: Front-end processing
4 Outline 4 Introduction Overview of SURF GPU Implementation Details Results Conclusion
5 Robust Image Features Summarize by a small number of interest points Less data More entropy Robust features Relatively insensitive to view changes Match more reliably SURF (Bay et. al 2006) 5 Scale, rotation, affine, perspective, etc. Simple to compute, small features
6 SURF: Detection 6 Use determinant of Hessian Components are convolution of the image with Gaussian derivatives Approximate these with box filters Very easy to compute (constant time) Does not impair detection

7 SURF: Detection 7 Scale invariance Run detector at many scales Take the local maxima Fit a quadratic patch to get sub-pixel resolution Rotation invariance Compute local orientation of the image near the interest point Compute descriptor relative to the local coordinate system
 16 = 64 dimensions 8 Same or better matching performance as SIFT (128 dimensions) Contrast invariance: normalize to a unit")
8 SURF: Description Split region around feature into 16 bins Each bin: sum 25 high-frequency Haar wavelet responses in x and y Also sum magnitude of responses ( dx, dy, dx, dy ) 16 = 64 dimensions 8 Same or better matching performance as SIFT (128 dimensions) Contrast invariance: normalize to a unit vector
9 Outline 9 Introduction Overview of SURF GPU Implementation Details Results Conclusion
10 Implementation Details Target platform: GeForce Go 7950 GTX OpenGL+Cg instead of CUDA No 32-bit integer textures No hardware blending of 32-bit floats Performance target 10 fps at 1280x1024 (speed of the camera) Bottleneck: memory bandwidth 10 Computation is almost free Texture lookups are expensive
11 Integral Image Computation The Integral Image allows constant time summation over arbitrarily large regions Each pixel contains the sum of all the values in the original image to the left and above it The sum of any rectangular region can be computed with four lookups 11
12 1-D Parallel Approach 12 Sum across columns in parallel, then across rows ~1000-degree parallelism (good) ~2000 passes (not as bad as you'd think) Ping-Pong between two textures to avoid readafter write dependencies Bad: Texture cache is 2-D (8 8 pixel blocks) Cache is flushed between rendering passes If we only use one row (column) in each rendering pass, we're wasting 7/8 of the memory bandwidth
13 2-D Parallel Approach (Blelloch) Sum within a column (row) in parallel as well Two phase approach, O(log n) passes each Upsweep: Collects local sums Downsweep: Distributes cumulative sums 13
14 Moment Pyramid Algorithm Blelloch still sums across columns, then rows Can we sum in both directions at once? To generate an integral image from a ¼ resolution integral image, need 4 pieces: Sum of upperleft region for odd x, odd y Sum of left row for odd x, even y 14 Sum of upper column for even x, odd y Original pixel for even x, even y

15 Moment Pyramid Algorithm Sum of upperleft region for odd x, odd y Sum of left row for odd x, even y Original pixel for even x, even y Where do we get the row/column sums? Output three values during upsweep 15 Sum of upper column for even x, odd y Sum of all 4 values, sum of 2 odd x, sum of 2 odd y Apply Blelloch's algorithm to make row/column sums on each level cumulative
16 Moment Pyramid Algorithm Downsweeps: Distribute cumulative sums Upsweeps: Collect local sums 16
17 Moment Pyramid Algorithm Why is this actually faster? Only read/write a full-sized image once Extremely good cache use More reads than texels fetched Algorithm 1D Ping Pong 2D Blelloch Reads 4N 12.5% 2N (2N) 4N N 100.0% 4N (6N) 6N 3.89 (4.33N) 4.33N D Moment Pyramid 7.67N 17 Cache Real Adds (effective) Writes Speed up Efficiency 109.5% 3.33N
18 Box Filters Gaussian derivatives for feature location Applied at many different resolutions and scales 18 Identify both position and size

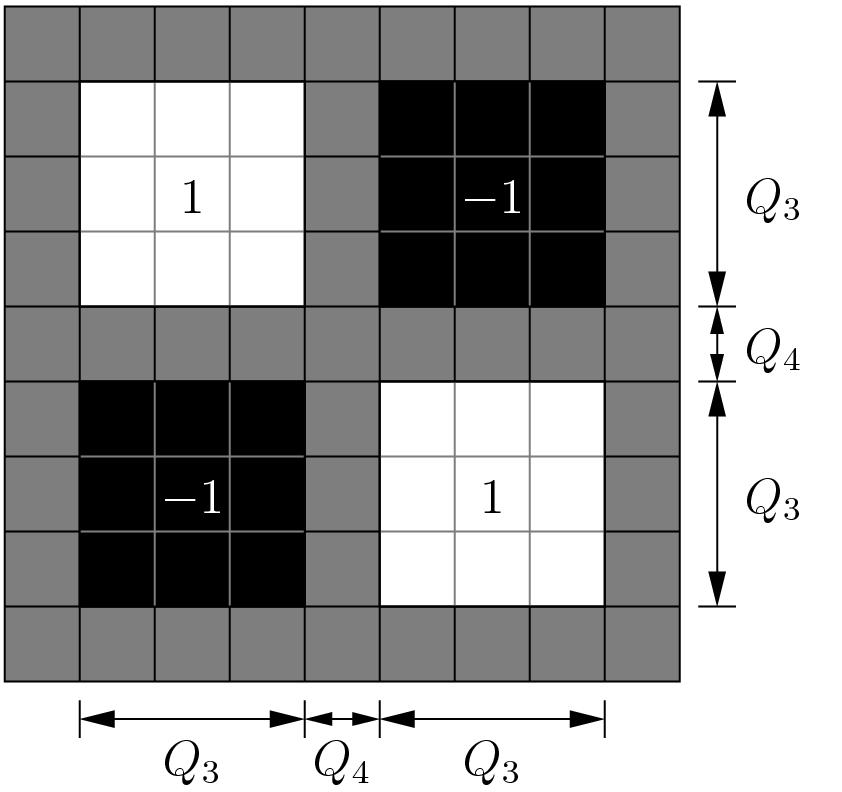
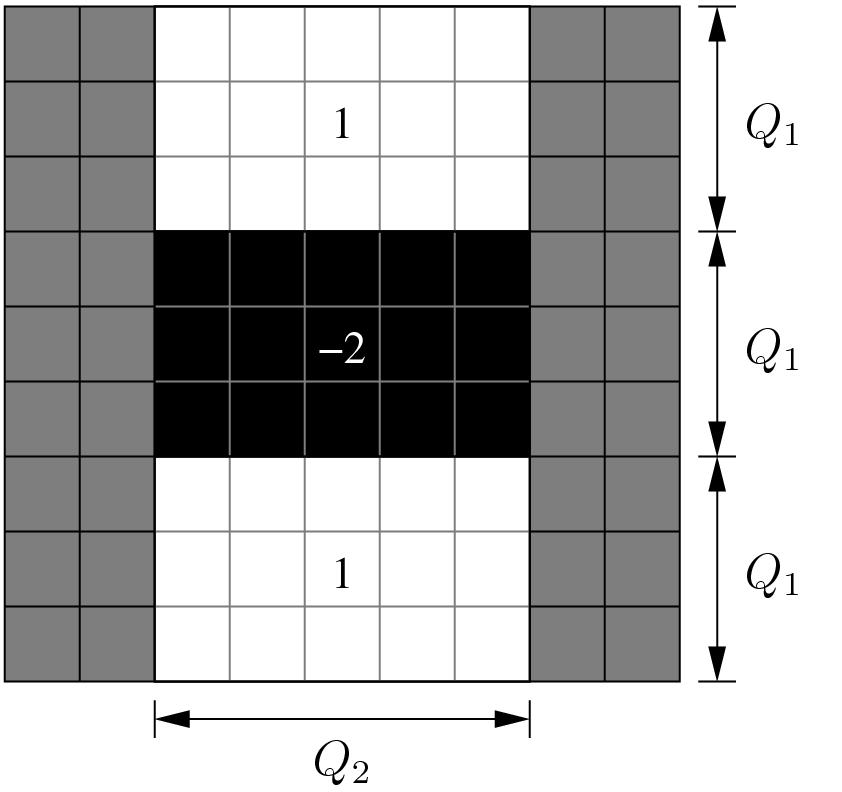
19 Box Filters Simple implementation requires 32 lookups 19 Too many!
20 Box Filters Simple implementation requires 32 lookups Many differences separated by common offsets Compute differences for all pixels in one pass Reuse each result for several pixels in another pass Can easily reduce to 17 lookups per scale 47% reduction in running time Do 3 scales at once: per scale 20 Too many! 77% reduction in running time
21 Box Filter Sampling Locations Pass 1 21 Pass 2 Pass 4 Pass 3 Pass 5

22 Point Location Compute Hessian determinant from box filters Find local maxima over threshold 22 Multiple passes of EarlyZ culling Tried stencil buffer approach, but had driver problems on Linux Convert to a flat array of coordinates using the HistoPyramid algorithm (Ziegler et al. 2006)

 RMS error 0.")
23 Orientation Detection Compute HF Haar responses in a 6s radius Sort by angle, use sliding window to find max 23 Sorting on a GPU is about as slow as on a CPU! Don't sort: histogram R2VB (Scheuermann & Hensley 2007) RMS error 0.20 using 256 bins Sum sliding window with Blelloch's algorithm

24 Feature Descriptor Need oriented Haar responses 24 Can only sum over rectangular regions Compute axis aligned responses Rotate the resulting vector
25 Outline Introduction Overview of SURF GPU Implementation Details Results Conclusion 25
26 Framerate vs. Resolution GeForce Go 7950 GTX GeForce 8800 GTX Does not include time to transfer image to the card, as this can be done asynchronously, and affects only latency, not throughput. 26
27 Go 7950 GTX Performance Breakdown 50.00% 40.00% 30.00% T0=1.00 T0=0.50 T0= % 10.00% 0.00% Radial Undistortion Integral Image Box Filters Point Location Orient. Detection Feature Extraction Execution time (in %) in each stage of the algorithm for various threshold levels 27
28 8800 GTX Performance Breakdown 50.00% 40.00% 30.00% T0=1.00 T0=0.50 T0= % 10.00% 0.00% Radial Undistortion Integral Image Box Filters Point Location Orient. Detection Feature Extraction Execution time (in %) in each stage of the algorithm for various threshold levels 28
29 7 Series vs. 8 Series 5 Speed-up 4 3 T0=1.00 T0=0.50 T0= Radial Undistortion Integral Image Box Filters Point Loc. Orient. Detection Feature Extraction Overall Improvement of the 8800 GTX over the Go 7950 GTX in each stage of the algorithm for various threshold levels 29




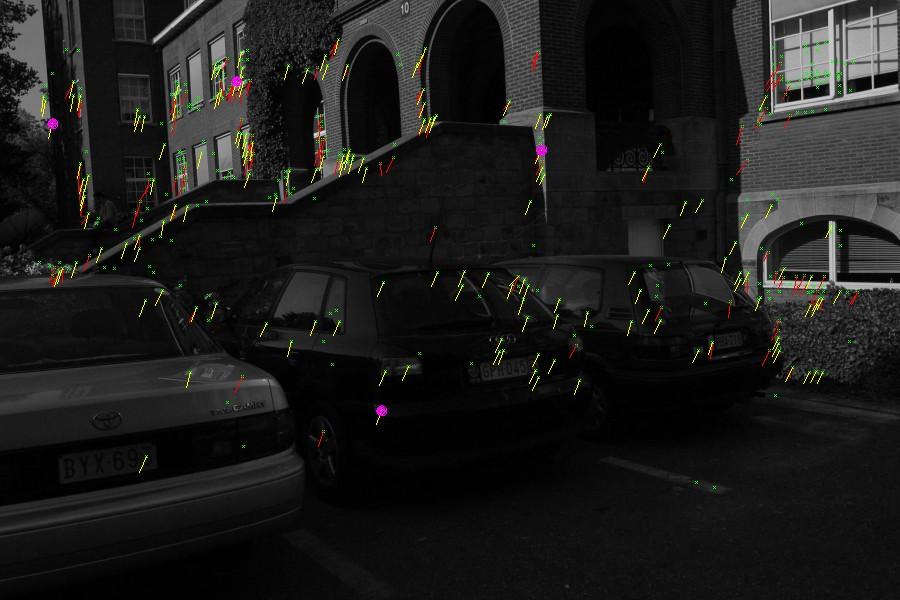


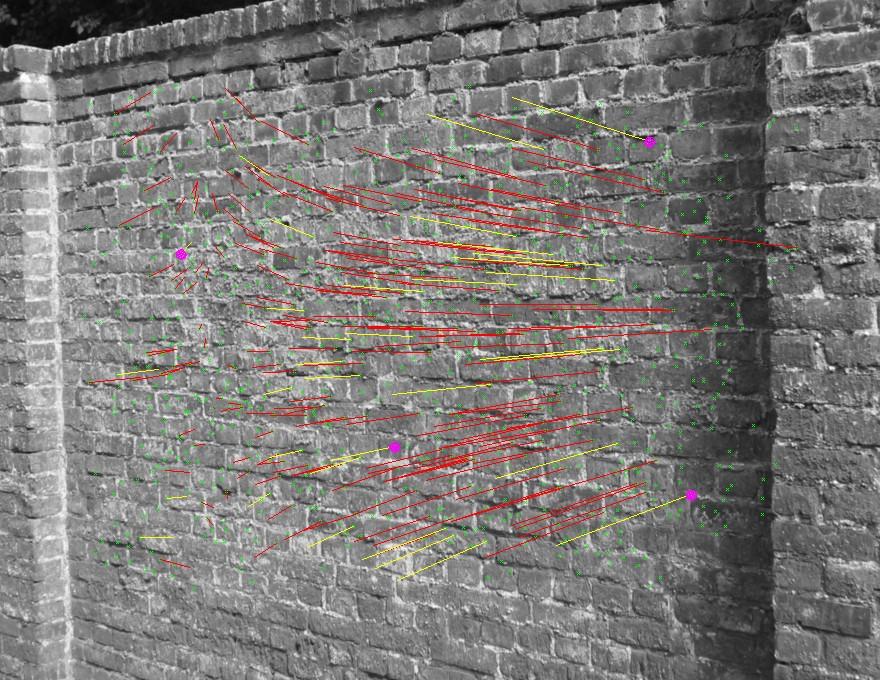

30 Registration Examples
31 Outline Introduction Overview of SURF GPU Implementation Details Results Conclusion 31
32 Conclusion 32 Lots of pieces 2-D parallel prefix sums (integral image) Common subexpression elimination (box filters) EarlyZ culling (point location) HistoPyramid (point location) Scattered writes for histogram generation (orientation detection) 1-D parallel prefix sums (orientation detection)
33 Conclusion Can process video in real time on a laptop 33 New cards will only be faster Scales to high resolutions on a desktop while still real time Enables a whole host of algorithms which require robust features as input Recognition, Tracking, Structure from Motion, Visual Navigation, etc.
34 Future Improvements CUDA Skip the graphics pipeline No render to texture API for multipass algorithms 32-bit Integer Textures Can reduce memory bandwidth by at least half Hardware bilinear interpolation for 32-bit floats 34 Need to add an extra copy Or avoid the texture cache (a large portion of local memory) Big speed gain for Haar responses
35 Questions? 35
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Accelerated Wide Baseline Matching using OpenCL
 010 3rd International Conference on Computer and Electrical Engineering (ICCEE 010) IPCSIT vol. 53 (01) (01) IACSIT Press, Singapore DOI: 10.7763/IPCSIT.01.V53.No..01 Accelerated Wide Baseline Matching
010 3rd International Conference on Computer and Electrical Engineering (ICCEE 010) IPCSIT vol. 53 (01) (01) IACSIT Press, Singapore DOI: 10.7763/IPCSIT.01.V53.No..01 Accelerated Wide Baseline Matching
SIFT Descriptor Extraction on the GPU for Large-Scale Video Analysis. Hannes Fassold, Jakub Rosner
 SIFT Descriptor Extraction on the GPU for Large-Scale Video Analysis Hannes Fassold, Jakub Rosner 2014-03-26 2 Overview GPU-activities @ AVM research group SIFT descriptor extraction Algorithm GPU implementation
SIFT Descriptor Extraction on the GPU for Large-Scale Video Analysis Hannes Fassold, Jakub Rosner 2014-03-26 2 Overview GPU-activities @ AVM research group SIFT descriptor extraction Algorithm GPU implementation
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Reconstruction of Images Distorted by Water Waves
 Reconstruction of Images Distorted by Water Waves Arturo Donate and Eraldo Ribeiro Computer Vision Group Outline of the talk Introduction Analysis Background Method Experiments Conclusions Future Work
Reconstruction of Images Distorted by Water Waves Arturo Donate and Eraldo Ribeiro Computer Vision Group Outline of the talk Introduction Analysis Background Method Experiments Conclusions Future Work
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Data-Parallel Algorithms on GPUs. Mark Harris NVIDIA Developer Technology
 Data-Parallel Algorithms on GPUs Mark Harris NVIDIA Developer Technology Outline Introduction Algorithmic complexity on GPUs Algorithmic Building Blocks Gather & Scatter Reductions Scan (parallel prefix)
Data-Parallel Algorithms on GPUs Mark Harris NVIDIA Developer Technology Outline Introduction Algorithmic complexity on GPUs Algorithmic Building Blocks Gather & Scatter Reductions Scan (parallel prefix)
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Object Detection by Point Feature Matching using Matlab
 Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Dominic Filion, Senior Engineer Blizzard Entertainment. Rob McNaughton, Lead Technical Artist Blizzard Entertainment
 Dominic Filion, Senior Engineer Blizzard Entertainment Rob McNaughton, Lead Technical Artist Blizzard Entertainment Screen-space techniques Deferred rendering Screen-space ambient occlusion Depth of Field
Dominic Filion, Senior Engineer Blizzard Entertainment Rob McNaughton, Lead Technical Artist Blizzard Entertainment Screen-space techniques Deferred rendering Screen-space ambient occlusion Depth of Field
Overview. Videos are everywhere. But can take up large amounts of resources. Exploit redundancy to reduce file size
 Overview Videos are everywhere But can take up large amounts of resources Disk space Memory Network bandwidth Exploit redundancy to reduce file size Spatial Temporal General lossless compression Huffman
Overview Videos are everywhere But can take up large amounts of resources Disk space Memory Network bandwidth Exploit redundancy to reduce file size Spatial Temporal General lossless compression Huffman
Comparison of Feature Detection and Matching Approaches: SIFT and SURF
 GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
Fast Scale Invariant Feature Detection and Matching on Programmable Graphics Hardware
 Fast Scale Invariant Feature Detection and Matching on Programmable Graphics Hardware Nico Cornelis K.U.Leuven Leuven, Belgium nico.cornelis@esat.kuleuven.be Luc Van Gool K.U.Leuven / ETH Zurich Leuven,
Fast Scale Invariant Feature Detection and Matching on Programmable Graphics Hardware Nico Cornelis K.U.Leuven Leuven, Belgium nico.cornelis@esat.kuleuven.be Luc Van Gool K.U.Leuven / ETH Zurich Leuven,
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
Image Processing Tricks in OpenGL. Simon Green NVIDIA Corporation
 Image Processing Tricks in OpenGL Simon Green NVIDIA Corporation Overview Image Processing in Games Histograms Recursive filters JPEG Discrete Cosine Transform Image Processing in Games Image processing
Image Processing Tricks in OpenGL Simon Green NVIDIA Corporation Overview Image Processing in Games Histograms Recursive filters JPEG Discrete Cosine Transform Image Processing in Games Image processing
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Direct Rendering. Direct Rendering Goals
 May 2, 2005 Goals General Goals Small memory footprint Fast rendering High-quality results identical to those of Saffron V1 using distance-based anti-aliasing and alignment zones Goals Specific Goals Avoid
May 2, 2005 Goals General Goals Small memory footprint Fast rendering High-quality results identical to those of Saffron V1 using distance-based anti-aliasing and alignment zones Goals Specific Goals Avoid
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Lecture 6: Texture. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 6: Texture Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Today: texturing! Texture filtering - Texture access is not just a 2D array lookup ;-) Memory-system implications
Lecture 6: Texture Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Today: texturing! Texture filtering - Texture access is not just a 2D array lookup ;-) Memory-system implications
Using GPUs to compute the multilevel summation of electrostatic forces
 Using GPUs to compute the multilevel summation of electrostatic forces David J. Hardy Theoretical and Computational Biophysics Group Beckman Institute for Advanced Science and Technology University of
Using GPUs to compute the multilevel summation of electrostatic forces David J. Hardy Theoretical and Computational Biophysics Group Beckman Institute for Advanced Science and Technology University of
CS8803SC Software and Hardware Cooperative Computing GPGPU. Prof. Hyesoon Kim School of Computer Science Georgia Institute of Technology
 CS8803SC Software and Hardware Cooperative Computing GPGPU Prof. Hyesoon Kim School of Computer Science Georgia Institute of Technology Why GPU? A quiet revolution and potential build-up Calculation: 367
CS8803SC Software and Hardware Cooperative Computing GPGPU Prof. Hyesoon Kim School of Computer Science Georgia Institute of Technology Why GPU? A quiet revolution and potential build-up Calculation: 367
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
Computer Graphics. Texture Filtering & Sampling Theory. Hendrik Lensch. Computer Graphics WS07/08 Texturing
 Computer Graphics Texture Filtering & Sampling Theory Hendrik Lensch Overview Last time Texture Parameterization Procedural Shading Today Texturing Filtering 2D Texture Mapping Forward mapping Object surface
Computer Graphics Texture Filtering & Sampling Theory Hendrik Lensch Overview Last time Texture Parameterization Procedural Shading Today Texturing Filtering 2D Texture Mapping Forward mapping Object surface
Optimizing DirectX Graphics. Richard Huddy European Developer Relations Manager
 Optimizing DirectX Graphics Richard Huddy European Developer Relations Manager Some early observations Bear in mind that graphics performance problems are both commoner and rarer than you d think The most
Optimizing DirectX Graphics Richard Huddy European Developer Relations Manager Some early observations Bear in mind that graphics performance problems are both commoner and rarer than you d think The most
Scott Smith Advanced Image Processing March 15, Speeded-Up Robust Features SURF
 Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
3D from Photographs: Automatic Matching of Images. Dr Francesco Banterle
 3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Optimizing for DirectX Graphics. Richard Huddy European Developer Relations Manager
 Optimizing for DirectX Graphics Richard Huddy European Developer Relations Manager Also on today from ATI... Start & End Time: 12:00pm 1:00pm Title: Precomputed Radiance Transfer and Spherical Harmonic
Optimizing for DirectX Graphics Richard Huddy European Developer Relations Manager Also on today from ATI... Start & End Time: 12:00pm 1:00pm Title: Precomputed Radiance Transfer and Spherical Harmonic
CS427 Multicore Architecture and Parallel Computing
 CS427 Multicore Architecture and Parallel Computing Lecture 6 GPU Architecture Li Jiang 2014/10/9 1 GPU Scaling A quiet revolution and potential build-up Calculation: 936 GFLOPS vs. 102 GFLOPS Memory Bandwidth:
CS427 Multicore Architecture and Parallel Computing Lecture 6 GPU Architecture Li Jiang 2014/10/9 1 GPU Scaling A quiet revolution and potential build-up Calculation: 936 GFLOPS vs. 102 GFLOPS Memory Bandwidth:
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
GeForce3 OpenGL Performance. John Spitzer
 GeForce3 OpenGL Performance John Spitzer GeForce3 OpenGL Performance John Spitzer Manager, OpenGL Applications Engineering jspitzer@nvidia.com Possible Performance Bottlenecks They mirror the OpenGL pipeline
GeForce3 OpenGL Performance John Spitzer GeForce3 OpenGL Performance John Spitzer Manager, OpenGL Applications Engineering jspitzer@nvidia.com Possible Performance Bottlenecks They mirror the OpenGL pipeline
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
CS 563 Advanced Topics in Computer Graphics QSplat. by Matt Maziarz
 CS 563 Advanced Topics in Computer Graphics QSplat by Matt Maziarz Outline Previous work in area Background Overview In-depth look File structure Performance Future Point Rendering To save on setup and
CS 563 Advanced Topics in Computer Graphics QSplat by Matt Maziarz Outline Previous work in area Background Overview In-depth look File structure Performance Future Point Rendering To save on setup and
Hardware Acceleration of Feature Detection and Description Algorithms on Low Power Embedded Platforms
 Hardware Acceleration of Feature Detection and Description Algorithms on LowPower Embedded Platforms Onur Ulusel, Christopher Picardo, Christopher Harris, Sherief Reda, R. Iris Bahar, School of Engineering,
Hardware Acceleration of Feature Detection and Description Algorithms on LowPower Embedded Platforms Onur Ulusel, Christopher Picardo, Christopher Harris, Sherief Reda, R. Iris Bahar, School of Engineering,
SIFT: Scale Invariant Feature Transform
 1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
Real - Time Rendering. Pipeline optimization. Michal Červeňanský Juraj Starinský
 Real - Time Rendering Pipeline optimization Michal Červeňanský Juraj Starinský Motivation Resolution 1600x1200, at 60 fps Hw power not enough Acceleration is still necessary 3.3.2010 2 Overview Application
Real - Time Rendering Pipeline optimization Michal Červeňanský Juraj Starinský Motivation Resolution 1600x1200, at 60 fps Hw power not enough Acceleration is still necessary 3.3.2010 2 Overview Application
A LOW-POWER VGA FULL-FRAME FEATURE EXTRACTION PROCESSOR. Dongsuk Jeon, Yejoong Kim, Inhee Lee, Zhengya Zhang, David Blaauw, and Dennis Sylvester
 A LOW-POWER VGA FULL-FRAME FEATURE EXTRACTION PROCESSOR Dongsuk Jeon, Yejoong Kim, Inhee Lee, Zhengya Zhang, David Blaauw, and Dennis Sylvester University of Michigan, Ann Arbor ABSTRACT This paper proposes
A LOW-POWER VGA FULL-FRAME FEATURE EXTRACTION PROCESSOR Dongsuk Jeon, Yejoong Kim, Inhee Lee, Zhengya Zhang, David Blaauw, and Dennis Sylvester University of Michigan, Ann Arbor ABSTRACT This paper proposes
Fast BVH Construction on GPUs
 Fast BVH Construction on GPUs Published in EUROGRAGHICS, (2009) C. Lauterbach, M. Garland, S. Sengupta, D. Luebke, D. Manocha University of North Carolina at Chapel Hill NVIDIA University of California
Fast BVH Construction on GPUs Published in EUROGRAGHICS, (2009) C. Lauterbach, M. Garland, S. Sengupta, D. Luebke, D. Manocha University of North Carolina at Chapel Hill NVIDIA University of California
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Rapid Natural Scene Text Segmentation
 Rapid Natural Scene Text Segmentation Ben Newhouse, Stanford University December 10, 2009 1 Abstract A new algorithm was developed to segment text from an image by classifying images according to the gradient
Rapid Natural Scene Text Segmentation Ben Newhouse, Stanford University December 10, 2009 1 Abstract A new algorithm was developed to segment text from an image by classifying images according to the gradient
FFT-Based Astronomical Image Registration and Stacking using GPU
 M. Aurand 4.21.2010 EE552 FFT-Based Astronomical Image Registration and Stacking using GPU The productive imaging of faint astronomical targets mandates vanishingly low noise due to the small amount of
M. Aurand 4.21.2010 EE552 FFT-Based Astronomical Image Registration and Stacking using GPU The productive imaging of faint astronomical targets mandates vanishingly low noise due to the small amount of
Computer Vision. Exercise 3 Panorama Stitching 09/12/2013. Compute Vision : Exercise 3 Panorama Stitching
 Computer Vision Exercise 3 Panorama Stitching 09/12/2013 Compute Vision : Exercise 3 Panorama Stitching The task Compute Vision : Exercise 3 Panorama Stitching 09/12/2013 2 Pipeline Compute Vision : Exercise
Computer Vision Exercise 3 Panorama Stitching 09/12/2013 Compute Vision : Exercise 3 Panorama Stitching The task Compute Vision : Exercise 3 Panorama Stitching 09/12/2013 2 Pipeline Compute Vision : Exercise
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Here s the general problem we want to solve efficiently: Given a light and a set of pixels in view space, resolve occlusion between each pixel and
 1 Here s the general problem we want to solve efficiently: Given a light and a set of pixels in view space, resolve occlusion between each pixel and the light. 2 To visualize this problem, consider the
1 Here s the general problem we want to solve efficiently: Given a light and a set of pixels in view space, resolve occlusion between each pixel and the light. 2 To visualize this problem, consider the
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Mattan Erez. The University of Texas at Austin
 EE382V: Principles in Computer Architecture Parallelism and Locality Fall 2008 Lecture 10 The Graphics Processing Unit Mattan Erez The University of Texas at Austin Outline What is a GPU? Why should we
EE382V: Principles in Computer Architecture Parallelism and Locality Fall 2008 Lecture 10 The Graphics Processing Unit Mattan Erez The University of Texas at Austin Outline What is a GPU? Why should we
SURF: Speeded Up Robust Features. CRV Tutorial Day 2010 David Chi Chung Tam Ryerson University
 SURF: Speeded Up Robust Features CRV Tutorial Day 2010 David Chi Chung Tam Ryerson University Goals of SURF A fast interest point detector and descriptor Maintaining comparable performance with other detectors
SURF: Speeded Up Robust Features CRV Tutorial Day 2010 David Chi Chung Tam Ryerson University Goals of SURF A fast interest point detector and descriptor Maintaining comparable performance with other detectors
L10 Layered Depth Normal Images. Introduction Related Work Structured Point Representation Boolean Operations Conclusion
 L10 Layered Depth Normal Images Introduction Related Work Structured Point Representation Boolean Operations Conclusion 1 Introduction Purpose: using the computational power on GPU to speed up solid modeling
L10 Layered Depth Normal Images Introduction Related Work Structured Point Representation Boolean Operations Conclusion 1 Introduction Purpose: using the computational power on GPU to speed up solid modeling
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Image Features. Work on project 1. All is Vanity, by C. Allan Gilbert,
 Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Pictures at an Exhibition
 Pictures at an Exhibition Han-I Su Department of Electrical Engineering Stanford University, CA, 94305 Abstract We employ an image identification algorithm for interactive museum guide with pictures taken
Pictures at an Exhibition Han-I Su Department of Electrical Engineering Stanford University, CA, 94305 Abstract We employ an image identification algorithm for interactive museum guide with pictures taken
CIS 665 GPU Programming and Architecture
 CIS 665 GPU Programming and Architecture Homework #3 Due: June 6/09/09 : 23:59:59PM EST 1) Benchmarking your GPU (25 points) Background: GPUBench is a benchmark suite designed to analyze the performance
CIS 665 GPU Programming and Architecture Homework #3 Due: June 6/09/09 : 23:59:59PM EST 1) Benchmarking your GPU (25 points) Background: GPUBench is a benchmark suite designed to analyze the performance
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Mobile Performance Tools and GPU Performance Tuning. Lars M. Bishop, NVIDIA Handheld DevTech Jason Allen, NVIDIA Handheld DevTools
 Mobile Performance Tools and GPU Performance Tuning Lars M. Bishop, NVIDIA Handheld DevTech Jason Allen, NVIDIA Handheld DevTools NVIDIA GoForce5500 Overview World-class 3D HW Geometry pipeline 16/32bpp
Mobile Performance Tools and GPU Performance Tuning Lars M. Bishop, NVIDIA Handheld DevTech Jason Allen, NVIDIA Handheld DevTools NVIDIA GoForce5500 Overview World-class 3D HW Geometry pipeline 16/32bpp
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
A Configurable Parallel Hardware Architecture for Efficient Integral Histogram Image Computing
 A Configurable Parallel Hardware Architecture for Efficient Integral Histogram Image Computing Abstract: Integral histogram image can accelerate the computing process of feature algorithm in computer vision,
A Configurable Parallel Hardware Architecture for Efficient Integral Histogram Image Computing Abstract: Integral histogram image can accelerate the computing process of feature algorithm in computer vision,
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
PowerVR Hardware. Architecture Overview for Developers
 Public Imagination Technologies PowerVR Hardware Public. This publication contains proprietary information which is subject to change without notice and is supplied 'as is' without warranty of any kind.
Public Imagination Technologies PowerVR Hardware Public. This publication contains proprietary information which is subject to change without notice and is supplied 'as is' without warranty of any kind.
FPGA-Based Feature Detection
 FPGA-Based Feature Detection Wennie Tabib School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 wtabib@andrew.cmu.edu Abstract Fast, accurate, autonomous robot navigation is essential
FPGA-Based Feature Detection Wennie Tabib School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 wtabib@andrew.cmu.edu Abstract Fast, accurate, autonomous robot navigation is essential
A Comparison of SIFT and SURF
 A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Fast Natural Feature Tracking for Mobile Augmented Reality Applications
 Fast Natural Feature Tracking for Mobile Augmented Reality Applications Jong-Seung Park 1, Byeong-Jo Bae 2, and Ramesh Jain 3 1 Dept. of Computer Science & Eng., University of Incheon, Korea 2 Hyundai
Fast Natural Feature Tracking for Mobile Augmented Reality Applications Jong-Seung Park 1, Byeong-Jo Bae 2, and Ramesh Jain 3 1 Dept. of Computer Science & Eng., University of Incheon, Korea 2 Hyundai
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Real-Time Hair Simulation and Rendering on the GPU. Louis Bavoil
 Real-Time Hair Simulation and Rendering on the GPU Sarah Tariq Louis Bavoil Results 166 simulated strands 0.99 Million triangles Stationary: 64 fps Moving: 41 fps 8800GTX, 1920x1200, 8XMSAA Results 166
Real-Time Hair Simulation and Rendering on the GPU Sarah Tariq Louis Bavoil Results 166 simulated strands 0.99 Million triangles Stationary: 64 fps Moving: 41 fps 8800GTX, 1920x1200, 8XMSAA Results 166
Face Recognition using SURF Features and SVM Classifier
 International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 8, Number 1 (016) pp. 1-8 Research India Publications http://www.ripublication.com Face Recognition using SURF Features
International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 8, Number 1 (016) pp. 1-8 Research India Publications http://www.ripublication.com Face Recognition using SURF Features
Render-To-Texture Caching. D. Sim Dietrich Jr.
 Render-To-Texture Caching D. Sim Dietrich Jr. What is Render-To-Texture Caching? Pixel shaders are becoming more complex and expensive Per-pixel shadows Dynamic Normal Maps Bullet holes Water simulation
Render-To-Texture Caching D. Sim Dietrich Jr. What is Render-To-Texture Caching? Pixel shaders are becoming more complex and expensive Per-pixel shadows Dynamic Normal Maps Bullet holes Water simulation
Object Recognition Algorithms for Computer Vision System: A Survey
 Volume 117 No. 21 2017, 69-74 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Object Recognition Algorithms for Computer Vision System: A Survey Anu
Volume 117 No. 21 2017, 69-74 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Object Recognition Algorithms for Computer Vision System: A Survey Anu
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
GeForce4. John Montrym Henry Moreton
 GeForce4 John Montrym Henry Moreton 1 Architectural Drivers Programmability Parallelism Memory bandwidth 2 Recent History: GeForce 1&2 First integrated geometry engine & 4 pixels/clk Fixed-function transform,
GeForce4 John Montrym Henry Moreton 1 Architectural Drivers Programmability Parallelism Memory bandwidth 2 Recent History: GeForce 1&2 First integrated geometry engine & 4 pixels/clk Fixed-function transform,
Lecture 25: Board Notes: Threads and GPUs
 Lecture 25: Board Notes: Threads and GPUs Announcements: - Reminder: HW 7 due today - Reminder: Submit project idea via (plain text) email by 11/24 Recap: - Slide 4: Lecture 23: Introduction to Parallel
Lecture 25: Board Notes: Threads and GPUs Announcements: - Reminder: HW 7 due today - Reminder: Submit project idea via (plain text) email by 11/24 Recap: - Slide 4: Lecture 23: Introduction to Parallel
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
How to Work on Next Gen Effects Now: Bridging DX10 and DX9. Guennadi Riguer ATI Technologies
 How to Work on Next Gen Effects Now: Bridging DX10 and DX9 Guennadi Riguer ATI Technologies Overview New pipeline and new cool things Simulating some DX10 features in DX9 Experimental techniques Why This
How to Work on Next Gen Effects Now: Bridging DX10 and DX9 Guennadi Riguer ATI Technologies Overview New pipeline and new cool things Simulating some DX10 features in DX9 Experimental techniques Why This
CIS 665 GPU Programming and Architecture
 CIS 665 GPU Programming and Architecture Homework #3 Due: February 2/11/07 : 23:59:59PM EST 1) Benchmarking your GPU (25 points) Background: GPUBench is a benchmark suite designed to analyze the performance
CIS 665 GPU Programming and Architecture Homework #3 Due: February 2/11/07 : 23:59:59PM EST 1) Benchmarking your GPU (25 points) Background: GPUBench is a benchmark suite designed to analyze the performance
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Architectures. Michael Doggett Department of Computer Science Lund University 2009 Tomas Akenine-Möller and Michael Doggett 1
 Architectures Michael Doggett Department of Computer Science Lund University 2009 Tomas Akenine-Möller and Michael Doggett 1 Overview of today s lecture The idea is to cover some of the existing graphics
Architectures Michael Doggett Department of Computer Science Lund University 2009 Tomas Akenine-Möller and Michael Doggett 1 Overview of today s lecture The idea is to cover some of the existing graphics
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical