Stochastic Road Shape Estimation, B. Southall & C. Taylor. Review by: Christopher Rasmussen
|
|
|
- Richard McBride
- 5 years ago
- Views:
Transcription
1 Stochastic Road Shape Estimation, B. Southall & C. Taylor Review by: Christopher Rasmussen September 26, 2002
2 Announcements Readings for next Tuesday: Chapter , in Forsyth & Ponce
3 Main Contributions Robust estimation of road shape 80 meters ahead on highways, plus car bearing, position within lane Recovers from mistracking Handles variety of lane types in different lighting conditions Integrates camera with non-visual modalities
4 Primary Techniques Condensation algorithm (particle filtering) for lane line tracking Specialized image processing to detect lane lines despite significant changes in illumination conditions
5 Assumptions Internal camera calibration available Needs to initialize camera pitch, height on lane of known width Flat road Accelerometers provide velocity, yaw rates Scanning radar detects on-road obstacles
6 Lane, Vehicle State tan of camera lateral offset lane rate of change bearing lane width pitch wrt within lane curvature of curvature wrt lane road plane
7 Road Shape Function Cubic polynomial
8 Dynamical Model noise yaw change pitch change where control/correction term
9 Measurement Model How to predict image coordinates of lane lines from road shape function (2), which is defined in the ground plane? Some trigonometry + applying perspective projection yields where H is the camera height This is nonlinear
10 Handling Nonlinear Models Many system & measurement models can t be represented by matrix multiplications (e.g., sine function for periodic motion) Kalman filtering with nonlinearities Extended Kalman filter Linearize nonlinear function with 1 st -order Taylor series approximation at each time step Unscented Kalman filter Approximate distribution rather than nonlinearity More efficient and accurate to 2 nd -order See
11 Pitch, Height Estimation Users indicates edges of known-width lane to find vanishing point & hence horizon line image height of horizon line (limit of v term in (6) as x )
12 Measuring Pitch Change SSD comparison of locations above and below horizon between successive frames to estimate vertical shift d j Function: camera focal length (vertical)
13 Finding Lane Markings Cross-correlation with triangular profile (e.g., kernel for line/roof edge detection) in red channel; threshold for candidates Must also exceed gray level threshold set dynamically depending on overall image brightness helps with shadows Still have problems with false positives
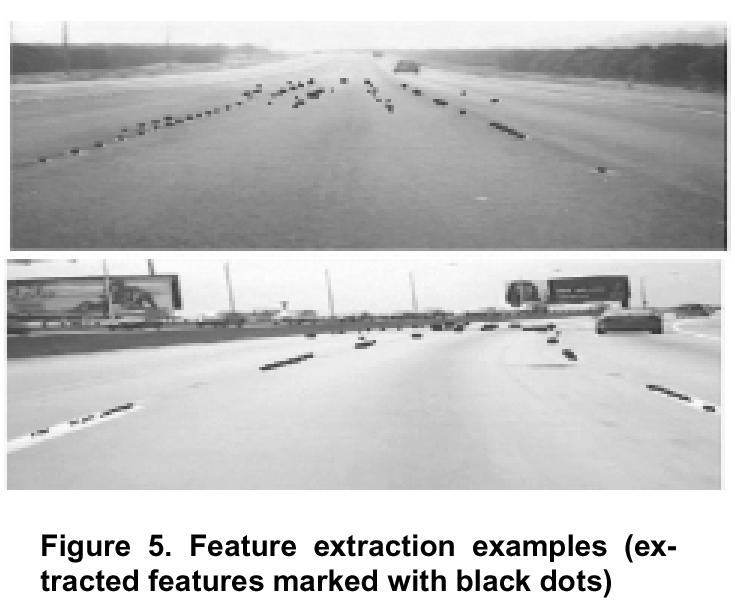
14 Figs
15 Tracking as Estimation Image likelihood p (I X) compares image to expectation based on state State prior p (X) summarizes domain knowledge, past estimates Bayesian approach: State posterior p (X I) p (I X) p (X) Maximum a posteriori (MAP) estimate: argmax of this expression i.e., the most probable state Maximum likelihood (ML) estimate: state which maximizes image likelihood (i.e., all states equally likely a priori)
, where s is a possible state and π is its weight Simulation instead of analytic solution underlying probability distribution may take any form State estimate Mean approach Average particle")
16 Estimation Using Condensation Condensation: A particle filter developed for person tracking (Isard & Blake, 1996) Idea: Stochastic approximation of state posterior with a set of N weighted particles (s, π), where s is a possible state and π is its weight Simulation instead of analytic solution underlying probability distribution may take any form State estimate Mean approach Average particle Confidence: inverse variance Really want a mode finder

17 Condensation: Estimating Target State State samples From Isard & Blake, 1998 Mean of weighted state samples
18 Updating the Particle Set (1) Select: Randomly select N particles based on weights; same particle may be picked multiple times (factored sampling) (2) Predict: Move particles according to deterministic dynamics (drift), then perturb individually (diffuse) (3) Measure: Get a likelihood for each new sample by making a prediction about the image s local appearance and comparing; then update weight on particle accordingly
19 Condensation: Conditional density propagation s ( n) ( ) 1, n k π k 1 drift observation density (n) s k diffuse measure s ( n) k, π ( n) k From Isard & Blake, 1998
20 Notes on Updating Enforcing plausibility: Particles that represent impossible configurations are discarded Diffusion modeled with a Gaussian Likelihood function: Convert goodness of prediction score to pseudo-probability More markings closer to predicted markings Higher likelihood

21 Condensation: State posterior From Isard & Blake, 1998
22 Benefits of Particle Filtering Nonlinear dynamics, measurement model easily incorporated Helps deal with lots of false positives for lane markings i.e., multi-modal posterior okay, whereas it contradicts Kalman filter assumptions

23 Estimation on Real Sequence
24 Extensions to Condensation Partitioned sampling (MacCormick & Isard, 2000) Split state up into low- (straight line) and highfrequency (curvature) components and sample hierarchically for efficiency Importance sampling (Isard & Blake, 1998) Give hints by introducing samples at more likely spots in state space Hough transform to fit lines to lane markings (see Forsyth & Ponce, Chapter 16.1) Accelerometer data to get instantaneous curvature C 0 Initialization samples Importance samples drawn from prior to allow autoinitialization and recovery
25 Connections MAV paper also estimates horizon line (using a Kalman filter) but with a bit more variation! Car tracking paper by Dellaert et al. detects cars visually, tracks them with Kalman filter Condensation algorithm used by museum tour guide to track its position
26 Related Work Shape extraction Edge-based [Dickmanns, 1997; Taylor et al., 1996] Texture curvature [Pomerleau, 1995] Region-based segmentation Color [Crisman & Thorpe, 1991; Fernandez & Casals, 1997] Texture [Zhang & Nagel, 1994] Structure from Motion [Smith, 1996] Sign finding Template-matching [Betke & Makris, 1995] Color [Piccioli et al., 1994; Lauzière et al., 2001]
27 Results Runs at 10.5 fps on PIII 867 MHz Good details on numbers of samples N in partitioned particle filter, percentage of importance samples and initialization samples, etc. No ground truth surely could use GPS/ differential GPS + map for some quantification Found that bright sunlight and specularities from wet roads are a problem Curve estimation lags because dynamical model (Eq. 4) does not predict non-random changes of curvature
28 Comments No comparison of performance with and without partitioned sampling, importance sampling, etc. For that matter, there s no comparison to Kalman filtering Image processing for illumination invariance fairly ad-hoc isn t there a better way than just using the red channel? No formula given for dynamic calculation of gray level threshold
29 Applications/Improvements Obviously, autonomous driving for transportation and cargo Driver assistance: Computer doesn t steer, but it can warn, etc. Or, a more advanced version of cruise control Put yaw rate, velocity into state, even if they are estimated non-visually Initialize pitch, height automatically their procedure requires the user to specify the lines that s not trying hard enough Mean particle not a robust state estimation technique what if multiple lanes are visible? How about trying to find them all, or detecting whether there are none?
30 Questions?
Stochastic road shape estimation
 Stochastic road shape estimation B. Southall C. J. Taylor GRASP Laboratory University of Pennsylvania Philadelphia, PA 1914 fsouthall,cjtaylor@grasp.cis.upenn.edug Abstract We describe a new system for
Stochastic road shape estimation B. Southall C. J. Taylor GRASP Laboratory University of Pennsylvania Philadelphia, PA 1914 fsouthall,cjtaylor@grasp.cis.upenn.edug Abstract We describe a new system for
Sensory Augmentation for Increased Awareness of Driving Environment
 Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Particle Filtering. CS6240 Multimedia Analysis. Leow Wee Kheng. Department of Computer Science School of Computing National University of Singapore
 Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Visual Motion Analysis and Tracking Part II
 Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Video Based Lane Estimation and Tracking for Driver Assistance: Survey, System, and Evaluation
 SUBMITTED FOR REVIEW: IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, DECEMBER 2004, REVISED JULY 2005 1 Video Based Lane Estimation and Tracking for Driver Assistance: Survey, System, and Evaluation
SUBMITTED FOR REVIEW: IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, DECEMBER 2004, REVISED JULY 2005 1 Video Based Lane Estimation and Tracking for Driver Assistance: Survey, System, and Evaluation
Object Tracking with an Adaptive Color-Based Particle Filter
 Object Tracking with an Adaptive Color-Based Particle Filter Katja Nummiaro 1, Esther Koller-Meier 2, and Luc Van Gool 1,2 1 Katholieke Universiteit Leuven, ESAT/VISICS, Belgium {knummiar,vangool}@esat.kuleuven.ac.be
Object Tracking with an Adaptive Color-Based Particle Filter Katja Nummiaro 1, Esther Koller-Meier 2, and Luc Van Gool 1,2 1 Katholieke Universiteit Leuven, ESAT/VISICS, Belgium {knummiar,vangool}@esat.kuleuven.ac.be
Scene Segmentation in Adverse Vision Conditions
 Scene Segmentation in Adverse Vision Conditions Evgeny Levinkov Max Planck Institute for Informatics, Saarbrücken, Germany levinkov@mpi-inf.mpg.de Abstract. Semantic road labeling is a key component of
Scene Segmentation in Adverse Vision Conditions Evgeny Levinkov Max Planck Institute for Informatics, Saarbrücken, Germany levinkov@mpi-inf.mpg.de Abstract. Semantic road labeling is a key component of
Vision Based Tangent Point Detection Algorithm, Evaluation and Validation
 15-6 MVA2009 IAPR Conference on Machine Vision Applications, May 20-22, 2009, Yokohama, JAPAN Vision Based Tangent Point Detection Algorithm, Evaluation and Validation Romain Gallen romain.gallen@lcpc.fr
15-6 MVA2009 IAPR Conference on Machine Vision Applications, May 20-22, 2009, Yokohama, JAPAN Vision Based Tangent Point Detection Algorithm, Evaluation and Validation Romain Gallen romain.gallen@lcpc.fr
Tracking Algorithms. Lecture16: Visual Tracking I. Probabilistic Tracking. Joint Probability and Graphical Model. Deterministic methods
 Tracking Algorithms CSED441:Introduction to Computer Vision (2017F) Lecture16: Visual Tracking I Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Deterministic methods Given input video and current state,
Tracking Algorithms CSED441:Introduction to Computer Vision (2017F) Lecture16: Visual Tracking I Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Deterministic methods Given input video and current state,
Integrated Vehicle and Lane Detection with Distance Estimation
 Integrated Vehicle and Lane Detection with Distance Estimation Yu-Chun Chen, Te-Feng Su, Shang-Hong Lai Department of Computer Science, National Tsing Hua University,Taiwan 30013, R.O.C Abstract. In this
Integrated Vehicle and Lane Detection with Distance Estimation Yu-Chun Chen, Te-Feng Su, Shang-Hong Lai Department of Computer Science, National Tsing Hua University,Taiwan 30013, R.O.C Abstract. In this
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
FMA901F: Machine Learning Lecture 3: Linear Models for Regression. Cristian Sminchisescu
 FMA901F: Machine Learning Lecture 3: Linear Models for Regression Cristian Sminchisescu Machine Learning: Frequentist vs. Bayesian In the frequentist setting, we seek a fixed parameter (vector), with value(s)
FMA901F: Machine Learning Lecture 3: Linear Models for Regression Cristian Sminchisescu Machine Learning: Frequentist vs. Bayesian In the frequentist setting, we seek a fixed parameter (vector), with value(s)
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels
 Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Self-calibration of an On-Board Stereo-vision System for Driver Assistance Systems
 4-1 Self-calibration of an On-Board Stereo-vision System for Driver Assistance Systems Juan M. Collado, Cristina Hilario, Arturo de la Escalera and Jose M. Armingol Intelligent Systems Lab Department of
4-1 Self-calibration of an On-Board Stereo-vision System for Driver Assistance Systems Juan M. Collado, Cristina Hilario, Arturo de la Escalera and Jose M. Armingol Intelligent Systems Lab Department of
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
STEREO-VISION SYSTEM PERFORMANCE ANALYSIS
 STEREO-VISION SYSTEM PERFORMANCE ANALYSIS M. Bertozzi, A. Broggi, G. Conte, and A. Fascioli Dipartimento di Ingegneria dell'informazione, Università di Parma Parco area delle Scienze, 181A I-43100, Parma,
STEREO-VISION SYSTEM PERFORMANCE ANALYSIS M. Bertozzi, A. Broggi, G. Conte, and A. Fascioli Dipartimento di Ingegneria dell'informazione, Università di Parma Parco area delle Scienze, 181A I-43100, Parma,
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
On Road Vehicle Detection using Shadows
 On Road Vehicle Detection using Shadows Gilad Buchman Grasp Lab, Department of Computer and Information Science School of Engineering University of Pennsylvania, Philadelphia, PA buchmag@seas.upenn.edu
On Road Vehicle Detection using Shadows Gilad Buchman Grasp Lab, Department of Computer and Information Science School of Engineering University of Pennsylvania, Philadelphia, PA buchmag@seas.upenn.edu
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
WITHIN the last few years, research into intelligent vehicles
 20 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 7, NO. 1, MARCH 2006 Video-Based Lane Estimation and Tracking for Driver Assistance: Survey, System, and Evaluation Joel C. McCall and Mohan
20 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 7, NO. 1, MARCH 2006 Video-Based Lane Estimation and Tracking for Driver Assistance: Survey, System, and Evaluation Joel C. McCall and Mohan
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Automatic Tracking of Moving Objects in Video for Surveillance Applications
 Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Holistic Modeling and Tracking of Road Scenes
 Holistic Modeling and Tracking of Road Scenes John J. Sprouse jsprouse@ri.cmu.edu October 2nd, 2006 Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 c Carnegie Mellon University
Holistic Modeling and Tracking of Road Scenes John J. Sprouse jsprouse@ri.cmu.edu October 2nd, 2006 Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 c Carnegie Mellon University
Overtaking Vehicle Detection Using Implicit Optical Flow
 Overtaking Vehicle Detection Using Implicit Optical Flow Parag H. Batavia Dean A. Pomerleau Charles E. Thorpe Robotics Institute - Carnegie Mellon University Pittsburgh, PA, USA Keywords - Optical Flow,
Overtaking Vehicle Detection Using Implicit Optical Flow Parag H. Batavia Dean A. Pomerleau Charles E. Thorpe Robotics Institute - Carnegie Mellon University Pittsburgh, PA, USA Keywords - Optical Flow,
Vision. OCR and OCV Application Guide OCR and OCV Application Guide 1/14
 Vision OCR and OCV Application Guide 1.00 OCR and OCV Application Guide 1/14 General considerations on OCR Encoded information into text and codes can be automatically extracted through a 2D imager device.
Vision OCR and OCV Application Guide 1.00 OCR and OCV Application Guide 1/14 General considerations on OCR Encoded information into text and codes can be automatically extracted through a 2D imager device.
Road Shape Classification for Detecting and Negotiating Intersections
 Road Shape Classification for Detecting and Negotiating Intersections Christopher Rasmussen Department of Computer & Information Sciences University of Delaware Newark, DE 19716 Abstract This paper presents
Road Shape Classification for Detecting and Negotiating Intersections Christopher Rasmussen Department of Computer & Information Sciences University of Delaware Newark, DE 19716 Abstract This paper presents
Map Guided Lane Detection Alexander Döbert 1,2, Andre Linarth 1,2, Eva Kollorz 2
 Map Guided Lane Detection Alexander Döbert 1,2, Andre Linarth 1,2, Eva Kollorz 2 1 Elektrobit Automotive GmbH, Am Wolfsmantel 46, 91058 Erlangen, Germany {AndreGuilherme.Linarth, Alexander.Doebert}@elektrobit.com
Map Guided Lane Detection Alexander Döbert 1,2, Andre Linarth 1,2, Eva Kollorz 2 1 Elektrobit Automotive GmbH, Am Wolfsmantel 46, 91058 Erlangen, Germany {AndreGuilherme.Linarth, Alexander.Doebert}@elektrobit.com
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Homework. Gaussian, Bishop 2.3 Non-parametric, Bishop 2.5 Linear regression Pod-cast lecture on-line. Next lectures:
 Homework Gaussian, Bishop 2.3 Non-parametric, Bishop 2.5 Linear regression 3.0-3.2 Pod-cast lecture on-line Next lectures: I posted a rough plan. It is flexible though so please come with suggestions Bayes
Homework Gaussian, Bishop 2.3 Non-parametric, Bishop 2.5 Linear regression 3.0-3.2 Pod-cast lecture on-line Next lectures: I posted a rough plan. It is flexible though so please come with suggestions Bayes
Practice Exam Sample Solutions
 CS 675 Computer Vision Instructor: Marc Pomplun Practice Exam Sample Solutions Note that in the actual exam, no calculators, no books, and no notes allowed. Question 1: out of points Question 2: out of
CS 675 Computer Vision Instructor: Marc Pomplun Practice Exam Sample Solutions Note that in the actual exam, no calculators, no books, and no notes allowed. Question 1: out of points Question 2: out of
Detecting and Identifying Moving Objects in Real-Time
 Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Transactions on Information and Communications Technologies vol 16, 1996 WIT Press, ISSN
 ransactions on Information and Communications echnologies vol 6, 996 WI Press, www.witpress.com, ISSN 743-357 Obstacle detection using stereo without correspondence L. X. Zhou & W. K. Gu Institute of Information
ransactions on Information and Communications echnologies vol 6, 996 WI Press, www.witpress.com, ISSN 743-357 Obstacle detection using stereo without correspondence L. X. Zhou & W. K. Gu Institute of Information
Detection and Classification of Vehicles
 Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Monocular Vision Based Autonomous Navigation for Arbitrarily Shaped Urban Roads
 Proceedings of the International Conference on Machine Vision and Machine Learning Prague, Czech Republic, August 14-15, 2014 Paper No. 127 Monocular Vision Based Autonomous Navigation for Arbitrarily
Proceedings of the International Conference on Machine Vision and Machine Learning Prague, Czech Republic, August 14-15, 2014 Paper No. 127 Monocular Vision Based Autonomous Navigation for Arbitrarily
Passive Multi Target Tracking with GM-PHD Filter
 Passive Multi Target Tracking with GM-PHD Filter Dann Laneuville DCNS SNS Division Toulon, France dann.laneuville@dcnsgroup.com Jérémie Houssineau DCNS SNS Division Toulon, France jeremie.houssineau@dcnsgroup.com
Passive Multi Target Tracking with GM-PHD Filter Dann Laneuville DCNS SNS Division Toulon, France dann.laneuville@dcnsgroup.com Jérémie Houssineau DCNS SNS Division Toulon, France jeremie.houssineau@dcnsgroup.com
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Fig Edge image of Fig. 19 Fig Edge image of Fig. 20
 page 18 Closer Vehicle Sequence (time code 14:48:20-14:48:24) Fig. 19 - Image sequence with close obstacles Fig. 20 - Same image 120mS later Fig. 21 - Edge image of Fig. 19 Fig. 22 - Edge image of Fig.
page 18 Closer Vehicle Sequence (time code 14:48:20-14:48:24) Fig. 19 - Image sequence with close obstacles Fig. 20 - Same image 120mS later Fig. 21 - Edge image of Fig. 19 Fig. 22 - Edge image of Fig.
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
HUMAN COMPUTER INTERFACE BASED ON HAND TRACKING
 Proceedings of MUSME 2011, the International Symposium on Multibody Systems and Mechatronics Valencia, Spain, 25-28 October 2011 HUMAN COMPUTER INTERFACE BASED ON HAND TRACKING Pedro Achanccaray, Cristian
Proceedings of MUSME 2011, the International Symposium on Multibody Systems and Mechatronics Valencia, Spain, 25-28 October 2011 HUMAN COMPUTER INTERFACE BASED ON HAND TRACKING Pedro Achanccaray, Cristian
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Vehicle Detection Method using Haar-like Feature on Real Time System
 Vehicle Detection Method using Haar-like Feature on Real Time System Sungji Han, Youngjoon Han and Hernsoo Hahn Abstract This paper presents a robust vehicle detection approach using Haar-like feature.
Vehicle Detection Method using Haar-like Feature on Real Time System Sungji Han, Youngjoon Han and Hernsoo Hahn Abstract This paper presents a robust vehicle detection approach using Haar-like feature.
Bayesian perspective-plane (BPP) with maximum likelihood searching for visual localization
 with maximum likelihood searching for visual localization") DOI 1.17/s1142-14-2134-8 Bayesian perspective-plane (BPP) with maximum likelihood searching for visual localization Zhaozheng Hu & Takashi Matsuyama Received: 8 November 213 /Revised: 15 April 214 /Accepted:
DOI 1.17/s1142-14-2134-8 Bayesian perspective-plane (BPP) with maximum likelihood searching for visual localization Zhaozheng Hu & Takashi Matsuyama Received: 8 November 213 /Revised: 15 April 214 /Accepted:
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
A Machine Vision System for Lane-Departure Detection
 Computer Vision and Image Understanding 86, 52 78 (2002) doi:10.1006/cviu.2002.0958 A Machine Vision System for Lane-Departure Detection Joon Woong Lee Department of Industrial Engineering, College of
Computer Vision and Image Understanding 86, 52 78 (2002) doi:10.1006/cviu.2002.0958 A Machine Vision System for Lane-Departure Detection Joon Woong Lee Department of Industrial Engineering, College of
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Real-Time Detection of Road Markings for Driving Assistance Applications
 Real-Time Detection of Road Markings for Driving Assistance Applications Ioana Maria Chira, Ancuta Chibulcutean Students, Faculty of Automation and Computer Science Technical University of Cluj-Napoca
Real-Time Detection of Road Markings for Driving Assistance Applications Ioana Maria Chira, Ancuta Chibulcutean Students, Faculty of Automation and Computer Science Technical University of Cluj-Napoca
Active Monte Carlo Recognition
 Active Monte Carlo Recognition Felix v. Hundelshausen 1 and Manuela Veloso 2 1 Computer Science Department, Freie Universität Berlin, 14195 Berlin, Germany hundelsh@googlemail.com 2 Computer Science Department,
Active Monte Carlo Recognition Felix v. Hundelshausen 1 and Manuela Veloso 2 1 Computer Science Department, Freie Universität Berlin, 14195 Berlin, Germany hundelsh@googlemail.com 2 Computer Science Department,
Time-to-Contact from Image Intensity
 Time-to-Contact from Image Intensity Yukitoshi Watanabe Fumihiko Sakaue Jun Sato Nagoya Institute of Technology Gokiso, Showa, Nagoya, 466-8555, Japan {yukitoshi@cv.,sakaue@,junsato@}nitech.ac.jp Abstract
Time-to-Contact from Image Intensity Yukitoshi Watanabe Fumihiko Sakaue Jun Sato Nagoya Institute of Technology Gokiso, Showa, Nagoya, 466-8555, Japan {yukitoshi@cv.,sakaue@,junsato@}nitech.ac.jp Abstract
Self Lane Assignment Using Smart Mobile Camera For Intelligent GPS Navigation and Traffic Interpretation
 For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
Cs : Computer Vision Final Project Report
 Cs 600.461: Computer Vision Final Project Report Giancarlo Troni gtroni@jhu.edu Raphael Sznitman sznitman@jhu.edu Abstract Given a Youtube video of a busy street intersection, our task is to detect, track,
Cs 600.461: Computer Vision Final Project Report Giancarlo Troni gtroni@jhu.edu Raphael Sznitman sznitman@jhu.edu Abstract Given a Youtube video of a busy street intersection, our task is to detect, track,
3D Lane Detection System Based on Stereovision
 3D Lane Detection System Based on Stereovision Sergiu Nedevschi, Rolf. Schmidt, Thorsten Graf, Radu Danescu, Dan Frentiu, Tiberiu Marita, Florin Oniga, Ciprian Pocol Abstract This paper presents a 3D lane
3D Lane Detection System Based on Stereovision Sergiu Nedevschi, Rolf. Schmidt, Thorsten Graf, Radu Danescu, Dan Frentiu, Tiberiu Marita, Florin Oniga, Ciprian Pocol Abstract This paper presents a 3D lane
Jo-Car2 Autonomous Mode. Path Planning (Cost Matrix Algorithm)
") Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
parco area delle Scienze, 181A via Ferrata, , Parma 27100, Pavia
 Proceedings of the IEEE Intelligent Vehicles Symposium 2000 Dearbon (MI), USA October 3-5, 2000 Stereo Vision-based Vehicle Detection M. Bertozzi 1 A. Broggi 2 A. Fascioli 1 S. Nichele 2 1 Dipartimento
Proceedings of the IEEE Intelligent Vehicles Symposium 2000 Dearbon (MI), USA October 3-5, 2000 Stereo Vision-based Vehicle Detection M. Bertozzi 1 A. Broggi 2 A. Fascioli 1 S. Nichele 2 1 Dipartimento
A Road Marking Extraction Method Using GPGPU
 , pp.46-54 http://dx.doi.org/10.14257/astl.2014.50.08 A Road Marking Extraction Method Using GPGPU Dajun Ding 1, Jongsu Yoo 1, Jekyo Jung 1, Kwon Soon 1 1 Daegu Gyeongbuk Institute of Science and Technology,
, pp.46-54 http://dx.doi.org/10.14257/astl.2014.50.08 A Road Marking Extraction Method Using GPGPU Dajun Ding 1, Jongsu Yoo 1, Jekyo Jung 1, Kwon Soon 1 1 Daegu Gyeongbuk Institute of Science and Technology,
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
High Resolution Optical Satellite Remote Sensing Images in Road Tracking System using UPF
 High Resolution Optical Satellite Remote Sensing Images in Road Tracking System using UPF J. Subashini, S. Sudha and D. Arulmozhi Department Of Electronics & Communication Engineering St.Anne s College
High Resolution Optical Satellite Remote Sensing Images in Road Tracking System using UPF J. Subashini, S. Sudha and D. Arulmozhi Department Of Electronics & Communication Engineering St.Anne s College
Tracking Multiple Moving Objects with a Mobile Robot
 Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Tracking. Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association
 Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Distributed Ray Tracing
 CT5510: Computer Graphics Distributed Ray Tracing BOCHANG MOON Distributed Ray Tracing Motivation The classical ray tracing produces very clean images (look fake) Perfect focus Perfect reflections Sharp
CT5510: Computer Graphics Distributed Ray Tracing BOCHANG MOON Distributed Ray Tracing Motivation The classical ray tracing produces very clean images (look fake) Perfect focus Perfect reflections Sharp
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences
 Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Preceding vehicle detection and distance estimation. lane change, warning system.
 Preceding vehicle detection and distance estimation for lane change warning system U. Iqbal, M.S. Sarfraz Computer Vision Research Group (COMVis) Department of Electrical Engineering, COMSATS Institute
Preceding vehicle detection and distance estimation for lane change warning system U. Iqbal, M.S. Sarfraz Computer Vision Research Group (COMVis) Department of Electrical Engineering, COMSATS Institute
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40
 Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40 Note 1: Both the analytical problems and the programming assignments are due at the beginning of class on Nov 15,
Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40 Note 1: Both the analytical problems and the programming assignments are due at the beginning of class on Nov 15,
CS 664 Image Matching and Robust Fitting. Daniel Huttenlocher
 CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University
 Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University NIPS 2008: E. Sudderth & M. Jordan, Shared Segmentation of Natural
Applied Bayesian Nonparametrics 5. Spatial Models via Gaussian Processes, not MRFs Tutorial at CVPR 2012 Erik Sudderth Brown University NIPS 2008: E. Sudderth & M. Jordan, Shared Segmentation of Natural
CS 130 Final. Fall 2015
 CS 130 Final Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is trying
CS 130 Final Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is trying
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Fog Detection System Based on Computer Vision Techniques
 Fog Detection System Based on Computer Vision Techniques S. Bronte, L. M. Bergasa, P. F. Alcantarilla Department of Electronics University of Alcalá Alcalá de Henares, Spain sebastian.bronte, bergasa,
Fog Detection System Based on Computer Vision Techniques S. Bronte, L. M. Bergasa, P. F. Alcantarilla Department of Electronics University of Alcalá Alcalá de Henares, Spain sebastian.bronte, bergasa,
Evaluation of Lane Detection Algorithms based on an Embedded Platform
 Evaluation of Lane Detection Algorithms based on an Embedded Platform Master Thesis Submitted in Fulfilment of the Requirements for the Academic Degree M.Sc. Dept. of Computer Science Chair of Computer
Evaluation of Lane Detection Algorithms based on an Embedded Platform Master Thesis Submitted in Fulfilment of the Requirements for the Academic Degree M.Sc. Dept. of Computer Science Chair of Computer
Model-based Visual Tracking:
 Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Free Space Detection on Highways using Time Correlation between Stabilized Sub-pixel precision IPM Images
 Free Space Detection on Highways using Time Correlation between Stabilized Sub-pixel precision IPM Images Pietro Cerri and Paolo Grisleri Artificial Vision and Intelligent System Laboratory Dipartimento
Free Space Detection on Highways using Time Correlation between Stabilized Sub-pixel precision IPM Images Pietro Cerri and Paolo Grisleri Artificial Vision and Intelligent System Laboratory Dipartimento
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles
 Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
An Angle Estimation to Landmarks for Autonomous Satellite Navigation
 5th International Conference on Environment, Materials, Chemistry and Power Electronics (EMCPE 2016) An Angle Estimation to Landmarks for Autonomous Satellite Navigation Qing XUE a, Hongwen YANG, Jian
5th International Conference on Environment, Materials, Chemistry and Power Electronics (EMCPE 2016) An Angle Estimation to Landmarks for Autonomous Satellite Navigation Qing XUE a, Hongwen YANG, Jian
Spatio-Temporal Stereo Disparity Integration
 Spatio-Temporal Stereo Disparity Integration Sandino Morales and Reinhard Klette The.enpeda.. Project, The University of Auckland Tamaki Innovation Campus, Auckland, New Zealand pmor085@aucklanduni.ac.nz
Spatio-Temporal Stereo Disparity Integration Sandino Morales and Reinhard Klette The.enpeda.. Project, The University of Auckland Tamaki Innovation Campus, Auckland, New Zealand pmor085@aucklanduni.ac.nz