Geometric Model of Camera
|
|
|
- Roxanne Miles
- 5 years ago
- Views:
Transcription
1 Geometric Model of Camera Dr. Gerhard Roth COMP 42A Winter 25 Version 2
2 Similar Triangles 2
3 Geometric Model of Camera Perspective projection P(X,Y,Z) p(,) f X Z f Y Z 3
4 Parallel lines aren t 4 Figure b David Forsth
5 Lengths can t be trusted... 5
6 Coordinate Transformation 2D p p p p p cos sin sin cos ' ' ' P ' '' ' '' T T T p p T T p p p cos sin sin cos ' ' '' Rotation and Translation 6
7 Homogeneous Coordinates Go one dimensional higher: z z is an arbitrar non-zero scalar, usuall e choose / / / / / From homogeneous coordinates to Cartesian coordinates: 7
8 2D Transformation ith Homogeneous Coordinates 2D coordinate transformation using homogeneous coordinates: T T p p p cos sin sin cos '' cos sin sin cos '' '' p p T T p p 2D coordinate transformation: 8
9 Homogeneous coordinates (In 2d) To points are equal if and onl if: / = / and / = / =: points at infinit useful for projections and curve draing Homogenize = divide b. Homogenized point eample: = = / = 644/7 = = / = 78/7 =
10 Wh use homogeneous co-ordinates We require a composition (sequence of) rotations, translations and projections Even the projection is a matri multiplication Each of these can be described b matri operations using homogeneous coordinates Composing them together, appling them one after the other just matri multiplication The final operation, hich takes a 3d point and produces a 2d image is one big matri multiplication
11 Translations ith homogeneous t t t t t t
12 Scaling ith homogeneous s s s s s s 2
13 Rotation ith homogeneous co-ord s cos sin sin cos cos sin sin cos cos sin sin cos 3


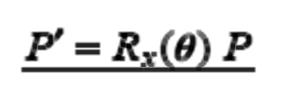
14 3D Rotation about X-Ais Representation in homogeneous co-ordinates

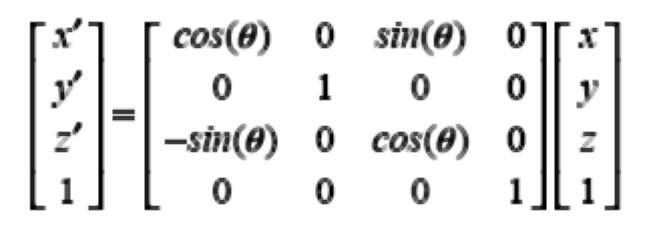
15 3D Rotation about Y-Ais Representation in homogeneous co-ordinates 5

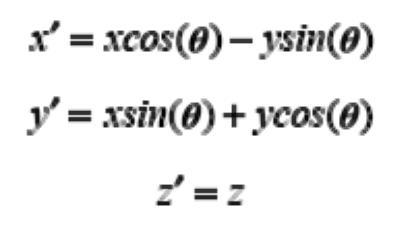
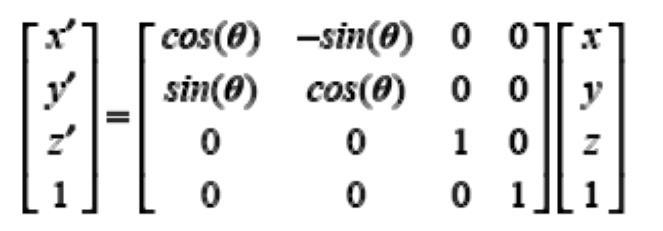
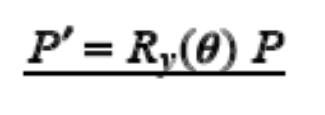
16 3D Rotation about Z-Ais Representation in homogeneous co-ordinates 6
17 3D Rotation Matri Euler Angles Rotate around each coordinate ais: R R Rz R ( ) cos sin sin cos R 2 ( ) cos sin sin cos sin R3( ) sin cos cos Combine the three rotations: R RRRz Can describe an 3d rotation b a sequence of rotations about the three ais So R = RRRz or RRzR or RRRz or RRzR or RzRR or RzRR 7
18 3d Rotation Matri When ou specif the values for each ais ou musts also specif order of operations Different orders have different angle values Succeeding rotations are about an alread modified set of three ais Remember matri multiplication is not commutative AB is not same as BA A rotation matri has 9 elements but e need onl three numbers to specif a 3d rotation uniquel! 8

19 3d Rotation Matri - Eamples 9
20 3D Rotation Rodriguez Rotations also described b ais and angle Rotation ais (2 parameters) and amount of rotation (angle parameter) Can convert beteen Euler Angles and Rodriguez representation 2
21 Degrees of freedom This is the number of parameters necessar to generate all possible instances of a given geometric object A 2d rotation has one degree of freedom Varing one parameter (angle) ill generate ever possible 2d rotation What are degrees of freedom of a 3d rotation It is a 3 b 3 matri ith nine numbers so is it 9? No, the anser is three (alas!) B varing three parameters e can generate ever possible 3d rotation matri (for ever representation!) Wh is it 3 and not 9? 2
22 Rotation Matrices Both 2d and 3d rotation matrices have to characteristics The are orthogonal (also called orthonormal) R T R I R T R Their determinant is Matri belo is orthogonal but not a rotation matri because the determinate is not this is a reflection matri 22
23 Rotation Matrices Ros and columns of a rotation matri are unit vectors Ever ro is orthogonal to ever other ros Their dot product is zero Ever column is orthogonal to ever other column Their dot product is zero These etra constraints mean that the entries in the rotation matri are not independent This reduces the degrees of freedom 23
24 3d Rotation Matri - Inversions Remember that cos(-t) = cos(t) And that sin(-t) = -sin(t) Also for rotation matrices hich e can see R T R I R T R 24
25 Homogeneous co-ordinates Transformation transform a point in an n dimensional space to another n dim point Transformations are scale, rotations, translations, etc. You can represent all these b multiplication b one appropriate matri using homogeneous co-ordinates Projection transform a point in an n dimensional space to an m dim point For projection m is normall less than n Perspective projection is a projection (3d to 2d) From the 3d orld to a 2d point in the image You can also represent a projection as matri multiplication ith one appropriate matri and homogeneous co-ordinates 25
26 Four Coordinate Frames im piel frame Z P Y Yc p im im camera frame optical center Xc Zc image plane frame principal point orld frame X Camera model: p transforma tion matri im P 26
27 Perspective Projection Z X f Z Y f These are nonlinear. Z Y X f f v u Using homogenous coordinate, e have a linear relation: u / v / 27
28 World to Camera Coordinate T RX X c T R c c c Z Y X Z Y X Transformation beteen the camera and orld coordinates. Here e rotate, then translate, to go from orld to camera co-ordinates hich is opposite of book, but is simpler and is the a in hich OpenCV routines do it: After R, and T e have converted from orld to camera frame. In the camera frame the z ais is along the optical center. 28
29 Camera Coordinates to Image Coordinates ( o ) s s im, s : ( o ) s im piel sizes in millimeters per piel (o,o) im im im im / s / s o o Camera co-ordinates, and are in millimetres Image co-ordinates im, im, are in piels Center of projection o, o is in piels Sign change because horizontal and vertical ais of the image and camera frame have opposite directions. 29
30 Image and Camera frames No e look from the camera outard and image origin is the top left piel (,) Zcamera Xcamera (im, im) (o,o) Ycamera Ximage Yimage 3
31 Put All Together World to Piel / / / / / / / / 3 2 c c c Z Y X T R o s f o s f Z Y X T R f f o s o s Z Y X f f o s o s v u o s o s Z Y X T R K / 3 im 3 im 2 / From camera to piel Add projection Add Rotation And Translation 3
32 Perspective Projection Matri Projection is a matri multiplication using homogeneous coordinates f f z f f z In practice: lots of coordinate transformations ( f z, f z ) divide b the third coordinate 2D point (3) = Camera to piel coord. trans. matri (33) Perspective projection matri (34) World to camera coord. trans. matri (44) 3D point (4) 32
33 Camera Parameters Etrinsic parameters define the location and orientation of the camera reference frame ith respect to a orld reference frame Depend on the eternal orld, so the are etrinsic Intrinsic parameters link piel co-ordinates in the image ith the corresponding coordinates in the camera reference frame An intrinsic characteristic of the camera Image co-ordinates are in piels Camera co-ordinates are in millimetres In formulas that do conversions the units must match! 33
34 Intrinsic Camera Parameters K f / s f / s o o K is a 33 upper triangular matri, called the Camera Calibration Matri. There are five intrinsic parameters: (a) The piel sizes in and directions s, s in millimeters/piel (b) The focal length f in millimeters (c) The principal point (o,o) in piels, hich is the point here the optic ais intersects the image plane. 34 (d) The units of f/s and f/s are in piels, h is this so?
35 Camera intrinsic parameters Can rite three of these parameters differentl b letting f/s = f and f/s = f Then intrinsic parameters are o,o,f,f The units of these parameters are piels! In practice piels are square (s = s) so that means f should equal f for most cameras Hoever, ever eplicit camera calibration process (using calibration objects) introduces some small errors These calibration errors make f not eactl equal to f So in OpenCV the intrinsic camera parameters are the four folloing o,o,f,f Hoever f is usuall ver close to f and if this is not the case then there is a problem 35
36 Etrinsic Parameters and Proj. Matri [R T] defines the etrinsic parameters. The 34 matri M = K[R T] is called the projection matri. It takes 3d points in the orld co-ordinate sstem and maps them to the appropriate image co-ordinates in piels 3 2 im Z Y X M Z Y X T R K p 36
37 Create a complete projection matri Camera located at T c =[T, T, T z ] t =[,2,3] t Camera aimed along z-ais,, aes parallel to orld aes (R=I) T I I I z I I I z I z I z I zz T c = = 2 R= = T T z 3 S= Camera has focal length f = f = image=6448, assume u =32, v =24 Calculate complete 34 projection matri P P 2 P 3 P 4 P 2 P 22 P 23 P = -2 = P 3 P 32 P 33 P
38 Using the projection matri - eample P P 2 P 3 P 4 P 2 P 22 P 23 P 24 P 3 P 32 P 33 P 34 = Where ould the point (2,5,2) project to in the image? Projection matri u v = P P 2 P 3 P 4 P 2 P 22 P 23 P 24 P 3 P 32 P 33 P 34 X Y Z = u v = u=u / = 644/7 = v=v / = 78/7 = 46.5 World point (2,5,2) project to piel With co-ordinates of (379,47) 38
39 Using the projection matri - eample P P 2 P 3 P 4 P 2 P 22 P 23 P 24 P 3 P 32 P 33 P 34 = Where ould the point (,2,2) project to in the image? Projection matri u v = P P 2 P 3 P 4 P 2 P 22 P 23 P 24 P 3 P 32 P 33 P 34 X Y Z = u v = u=u / = 544/7 = 32 v=v / = 48/7 = 24 39

40 Effect of change in focal length Small f is ide angle, large f is telescopic 4
41 Orthographic Projection X I m X Y M X Y Z C c Z Y 4
42 Orthographic Projection X I O 3 C Z O O2 Y 42
43 Orthographic Projection Special case of perspective projection Distance from center of projection to image plane is infinite Image World Also called parallel projection What s the projection matri? 43 Slide b Steve Seitz
44 Weak Perspective Model Assume the relative distance beteen an to points in an object along the principal ais is much smaller (/2 th at most) than the Z average distance of the object. Then the camera projection can be approimated as: f X Z f Z X f Y Z f Z Y This is the eak-perspective camera model. Sometimes called scaled orthograph. 44
45 Weak Perspective Projection To step projection: X I C Z c Z Y plane image plane average depth 45
46 Weak Perspective 46
47 Impact of different projections Perspective projections Parallel lines in orld are not parallel in the image Object projection gets smaller ith distance from camera Weak perspective projection Parallel lines in the orld are parallel in the image Object projection gets smaller ith distance from camera Orthographic projection Parallel lines in the orld are parallel in the image Object projection is unchanged ith distance from camera 47

48 Ordinar Perspective Parallel lines in orld - not parallel in image 48

49 Weak Perspective Parallel lines in orld parallel in image 49

 2 Correction uses three parameters,")
50 Image distortion due to optics Radial distortion hich depends on radius r, distance of each point from center of image r 2 = (- o) 2 +(- o) 2 Correction uses three parameters, k,k 2,k 3 5
 Barrel too far, Pincushion too")
51 Radial Distortion Error is proportional to distance of piel from the camera center (the radius of the point) Barrel too far, Pincushion too close 5


52 Correcting Radial Distortions 52

53 Tangential Distortion (O, O) center of projection) is not the center of image Also causes a more comple distortion of the image 53
 and onl then does standard calibration matri K appl to the image Camera calibration computes both K and these five distortion")
54 Tangential Distortion Lens not eactl parallel to the image plane Correction uses to parameter p, p 2 Both tpes of distortion are removed (image is un-distorted) and onl then does standard calibration matri K appl to the image Camera calibration computes both K and these five distortion parameters 54
55 Ho to find the camera parameters K Can use the EXIF tag for an digital image Has focal length f in millimeters but not the piel size But ou can get the piel size from the camera manual There are onl a finite number of different piels sizes because the number of sensing element sizes is limited If there is not a lot of image distortion due to optics then this approach is sufficient (this is onl a linear calibration) Can perform eplicit camera calibration Put a calibration pattern in front of the camera Take a number of different pictures of this pattern No run the calibration algorithm (different tpes) Result is intrinsic camera parameters (linear and non-linear) and the etrinsic camera parameters of all the images 55
56 Summar Questions Wh do e use homogeneous co-ordinates for image projection? Write the projection equation in a linear form using a matri ith homogeneous co-ordinates. What are the units of image co-ordinates and camera co-ordinates? Ho do ou convert beteen them? Wh do the names etrinsic, and intrinsic parameters of a lens make sense? What are the units of f/s, and f/s? Implications? What are characteristics of perspective, eak perspective and orthographic projection? What are parameters of models for non-linear lens characteristics? 56
3-Dimensional Viewing
 CHAPTER 6 3-Dimensional Vieing Vieing and projection Objects in orld coordinates are projected on to the vie plane, hich is defined perpendicular to the vieing direction along the v -ais. The to main tpes
CHAPTER 6 3-Dimensional Vieing Vieing and projection Objects in orld coordinates are projected on to the vie plane, hich is defined perpendicular to the vieing direction along the v -ais. The to main tpes
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration
 MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
3D Geometry and Camera Calibration
 3D Geometr and Camera Calibration 3D Coordinate Sstems Right-handed vs. left-handed 2D Coordinate Sstems ais up vs. ais down Origin at center vs. corner Will often write (u, v) for image coordinates v
3D Geometr and Camera Calibration 3D Coordinate Sstems Right-handed vs. left-handed 2D Coordinate Sstems ais up vs. ais down Origin at center vs. corner Will often write (u, v) for image coordinates v
2D transformations and homogeneous coordinates
 2D transformations and homogeneous coordinates Dr Nicolas Holzschuch Universit of Cape Ton e-mail: holzschu@cs.uct.ac.za Map of the lecture Transformations in 2D: vector/matri notation eample: translation,
2D transformations and homogeneous coordinates Dr Nicolas Holzschuch Universit of Cape Ton e-mail: holzschu@cs.uct.ac.za Map of the lecture Transformations in 2D: vector/matri notation eample: translation,
3D Sensing. Translation and Scaling in 3D. Rotation about Arbitrary Axis. Rotation in 3D is about an axis
 3D Sensing Camera Model: Recall there are 5 Different Frames of Reference c Camera Model and 3D Transformations Camera Calibration (Tsai s Method) Depth from General Stereo (overview) Pose Estimation from
3D Sensing Camera Model: Recall there are 5 Different Frames of Reference c Camera Model and 3D Transformations Camera Calibration (Tsai s Method) Depth from General Stereo (overview) Pose Estimation from
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Computer Graphics. Geometric Transformations
 Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical descriptions of geometric changes,
Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical descriptions of geometric changes,
Image Warping. Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Spring 2 Image Transformations image filtering: change range of image g() = T(f())
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Spring 2 Image Transformations image filtering: change range of image g() = T(f())
Computer Graphics. Geometric Transformations
 Computer Graphics Geometric Transformations Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical
Computer Graphics Geometric Transformations Contents coordinate sstems scalar values, points, vectors, matrices right-handed and left-handed coordinate sstems mathematical foundations transformations mathematical
Announcements. Equation of Perspective Projection. Image Formation and Cameras
 Announcements Image ormation and Cameras Introduction to Computer Vision CSE 52 Lecture 4 Read Trucco & Verri: pp. 22-4 Irfanview: http://www.irfanview.com/ is a good Windows utilit for manipulating images.
Announcements Image ormation and Cameras Introduction to Computer Vision CSE 52 Lecture 4 Read Trucco & Verri: pp. 22-4 Irfanview: http://www.irfanview.com/ is a good Windows utilit for manipulating images.
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
CSE328 Fundamentals of Computer Graphics: Theory, Algorithms, and Applications
 CSE328 Fundamentals of Computer Graphics: Theor, Algorithms, and Applications Hong in State Universit of New York at Ston Brook (Ston Brook Universit) Ston Brook, New York 794-44 Tel: (63)632-845; Fa:
CSE328 Fundamentals of Computer Graphics: Theor, Algorithms, and Applications Hong in State Universit of New York at Ston Brook (Ston Brook Universit) Ston Brook, New York 794-44 Tel: (63)632-845; Fa:
1. We ll look at: Types of geometrical transformation. Vector and matrix representations
 Tob Howard COMP272 Computer Graphics and Image Processing 3: Transformations Tob.Howard@manchester.ac.uk Introduction We ll look at: Tpes of geometrical transformation Vector and matri representations
Tob Howard COMP272 Computer Graphics and Image Processing 3: Transformations Tob.Howard@manchester.ac.uk Introduction We ll look at: Tpes of geometrical transformation Vector and matri representations
Modeling Transformations
 Modeling Transformations Michael Kazhdan (601.457/657) HB Ch. 5 FvDFH Ch. 5 Overview Ra-Tracing so far Modeling transformations Ra Tracing Image RaTrace(Camera camera, Scene scene, int width, int heigh,
Modeling Transformations Michael Kazhdan (601.457/657) HB Ch. 5 FvDFH Ch. 5 Overview Ra-Tracing so far Modeling transformations Ra Tracing Image RaTrace(Camera camera, Scene scene, int width, int heigh,
Image Warping. Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 26 Image Warping image filtering: change range of image g() T(f()) f T f image
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 26 Image Warping image filtering: change range of image g() T(f()) f T f image
Announcements. The equation of projection. Image Formation and Cameras
 Announcements Image ormation and Cameras Introduction to Computer Vision CSE 52 Lecture 4 Read Trucco & Verri: pp. 5-4 HW will be on web site tomorrow or Saturda. Irfanview: http://www.irfanview.com/ is
Announcements Image ormation and Cameras Introduction to Computer Vision CSE 52 Lecture 4 Read Trucco & Verri: pp. 5-4 HW will be on web site tomorrow or Saturda. Irfanview: http://www.irfanview.com/ is
Perspective Projection Transformation
 Perspective Projection Transformation Where does a point of a scene appear in an image?? p p Transformation in 3 steps:. scene coordinates => camera coordinates. projection of camera coordinates into image
Perspective Projection Transformation Where does a point of a scene appear in an image?? p p Transformation in 3 steps:. scene coordinates => camera coordinates. projection of camera coordinates into image
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Image Warping CSE399b, Spring 07 Computer Vision
 Image Warping CSE399b, Spring 7 Computer Vision http://maps.a9.com http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html Autostiching on A9.com
Image Warping CSE399b, Spring 7 Computer Vision http://maps.a9.com http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html http://www.cs.ubc.ca/~mbrown/autostitch/autostitch.html Autostiching on A9.com
Image formation - About the course. Grading & Project. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 305) Hours Lecture: Tuesda 5:30-8:00pm, TTLMAN 403B Office hour: Tuesda 3:00-5:00pm, or b appointment Tetbook Computer Vision: Models,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 305) Hours Lecture: Tuesda 5:30-8:00pm, TTLMAN 403B Office hour: Tuesda 3:00-5:00pm, or b appointment Tetbook Computer Vision: Models,
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
What and Why Transformations?
 2D transformations What and Wh Transformations? What? : The geometrical changes of an object from a current state to modified state. Changing an object s position (translation), orientation (rotation)
2D transformations What and Wh Transformations? What? : The geometrical changes of an object from a current state to modified state. Changing an object s position (translation), orientation (rotation)
Image Warping : Computational Photography Alexei Efros, CMU, Fall Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 2 Image Transformations image filtering: change range of image g() T(f())
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 2 Image Transformations image filtering: change range of image g() T(f())
Geometry of image formation
 Geometr of image formation Tomáš Svoboda, svoboda@cmp.felk.cvut.c ech Technical Universit in Prague, enter for Machine Perception http://cmp.felk.cvut.c Last update: November 0, 2008 Talk Outline Pinhole
Geometr of image formation Tomáš Svoboda, svoboda@cmp.felk.cvut.c ech Technical Universit in Prague, enter for Machine Perception http://cmp.felk.cvut.c Last update: November 0, 2008 Talk Outline Pinhole
Image Warping (Szeliski Sec 2.1.2)
") Image Warping (Szeliski Sec 2..2) http://www.jeffre-martin.com CS94: Image Manipulation & Computational Photograph Aleei Efros, UC Berkele, Fall 7 Some slides from Steve Seitz Image Transformations image
Image Warping (Szeliski Sec 2..2) http://www.jeffre-martin.com CS94: Image Manipulation & Computational Photograph Aleei Efros, UC Berkele, Fall 7 Some slides from Steve Seitz Image Transformations image
Motivation. What we ve seen so far. Demo (Projection Tutorial) Outline. Projections. Foundations of Computer Graphics
 Outline. Projections. Foundations of Computer Graphics") Foundations of Computer Graphics Online Lecture 5: Viewing Orthographic Projection Ravi Ramamoorthi Motivation We have seen transforms (between coord sstems) But all that is in 3D We still need to make
Foundations of Computer Graphics Online Lecture 5: Viewing Orthographic Projection Ravi Ramamoorthi Motivation We have seen transforms (between coord sstems) But all that is in 3D We still need to make
CS770/870 Spring 2017 Transformations
 CS770/870 Spring 2017 Transformations Coordinate sstems 2D Transformations Homogeneous coordinates Matrices, vectors, points Coordinate Sstems Coordinate sstems used in graphics Screen coordinates: the
CS770/870 Spring 2017 Transformations Coordinate sstems 2D Transformations Homogeneous coordinates Matrices, vectors, points Coordinate Sstems Coordinate sstems used in graphics Screen coordinates: the
Modeling Transformations
 Modeling Transformations Michael Kazhdan (601.457/657) HB Ch. 5 FvDFH Ch. 5 Announcement Assignment 2 has been posted: Due: 10/24 ASAP: Download the code and make sure it compiles» On windows: just build
Modeling Transformations Michael Kazhdan (601.457/657) HB Ch. 5 FvDFH Ch. 5 Announcement Assignment 2 has been posted: Due: 10/24 ASAP: Download the code and make sure it compiles» On windows: just build
Geometry of a single camera. Odilon Redon, Cyclops, 1914
 Geometr o a single camera Odilon Redon, Cclops, 94 Our goal: Recover o 3D structure Recover o structure rom one image is inherentl ambiguous??? Single-view ambiguit Single-view ambiguit Rashad Alakbarov
Geometr o a single camera Odilon Redon, Cclops, 94 Our goal: Recover o 3D structure Recover o structure rom one image is inherentl ambiguous??? Single-view ambiguit Single-view ambiguit Rashad Alakbarov
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Determining the 2d transformation that brings one image into alignment (registers it) with another. And
 with another. And") Last two lectures: Representing an image as a weighted combination of other images. Toda: A different kind of coordinate sstem change. Solving the biggest problem in using eigenfaces? Toda Recognition
Last two lectures: Representing an image as a weighted combination of other images. Toda: A different kind of coordinate sstem change. Solving the biggest problem in using eigenfaces? Toda Recognition
Today s class. Geometric objects and transformations. Informationsteknologi. Wednesday, November 7, 2007 Computer Graphics - Class 5 1
 Toda s class Geometric objects and transformations Wednesda, November 7, 27 Computer Graphics - Class 5 Vector operations Review of vector operations needed for working in computer graphics adding two
Toda s class Geometric objects and transformations Wednesda, November 7, 27 Computer Graphics - Class 5 Vector operations Review of vector operations needed for working in computer graphics adding two
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Computer Graphics. P04 Transformations. Aleksandra Pizurica Ghent University
 Computer Graphics P4 Transformations Aleksandra Pizurica Ghent Universit Telecommunications and Information Processing Image Processing and Interpretation Group Transformations in computer graphics Goal:
Computer Graphics P4 Transformations Aleksandra Pizurica Ghent Universit Telecommunications and Information Processing Image Processing and Interpretation Group Transformations in computer graphics Goal:
To Do. Demo (Projection Tutorial) Motivation. What we ve seen so far. Outline. Foundations of Computer Graphics (Fall 2012) CS 184, Lecture 5: Viewing
 Motivation. What we ve seen so far. Outline. Foundations of Computer Graphics (Fall 2012) CS 184, Lecture 5: Viewing") Foundations of Computer Graphics (Fall 0) CS 84, Lecture 5: Viewing http://inst.eecs.berkele.edu/~cs84 To Do Questions/concerns about assignment? Remember it is due Sep. Ask me or TAs re problems Motivation
Foundations of Computer Graphics (Fall 0) CS 84, Lecture 5: Viewing http://inst.eecs.berkele.edu/~cs84 To Do Questions/concerns about assignment? Remember it is due Sep. Ask me or TAs re problems Motivation
Jorge Salvador Marques, geometric camera model
 geometric camera model image acquisition 6 years ago today curc of te Holy Spirit, Brunellesci, 436 te camera projects 3D points into an image plane geometric primitives and transformations How do we see
geometric camera model image acquisition 6 years ago today curc of te Holy Spirit, Brunellesci, 436 te camera projects 3D points into an image plane geometric primitives and transformations How do we see
Viewing Transformations I Comp 535
 Viewing Transformations I Comp 535 Motivation Want to see our virtual 3-D worl on a 2-D screen 2 Graphics Pipeline Moel Space Moel Transformations Worl Space Viewing Transformation Ee/Camera Space Projection
Viewing Transformations I Comp 535 Motivation Want to see our virtual 3-D worl on a 2-D screen 2 Graphics Pipeline Moel Space Moel Transformations Worl Space Viewing Transformation Ee/Camera Space Projection
Uses of Transformations. 2D transformations Homogeneous coordinates. Transformations. Transformations. Transformations. Transformations and matrices
 Uses of Transformations 2D transformations Homogeneous coordinates odeling: position and resie parts of a comple model; Viewing: define and position the virtual camera Animation: define how objects move/change
Uses of Transformations 2D transformations Homogeneous coordinates odeling: position and resie parts of a comple model; Viewing: define and position the virtual camera Animation: define how objects move/change
CSE528 Computer Graphics: Theory, Algorithms, and Applications
 CSE528 Computer Graphics: Theor, Algorithms, and Applications Hong Qin State Universit of New York at Ston Brook (Ston Brook Universit) Ston Brook, New York 794--44 Tel: (63)632-845; Fa: (63)632-8334 qin@cs.sunsb.edu
CSE528 Computer Graphics: Theor, Algorithms, and Applications Hong Qin State Universit of New York at Ston Brook (Ston Brook Universit) Ston Brook, New York 794--44 Tel: (63)632-845; Fa: (63)632-8334 qin@cs.sunsb.edu
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
MEM380 Applied Autonomous Robots Winter Robot Kinematics
 MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
CS559: Computer Graphics
 CS559: Computer Graphics Lecture 8: 3D Transforms Li Zhang Spring 28 Most Slides from Stephen Chenne Finish Color space Toda 3D Transforms and Coordinate sstem Reading: Shirle ch 6 RGB and HSV Green(,,)
CS559: Computer Graphics Lecture 8: 3D Transforms Li Zhang Spring 28 Most Slides from Stephen Chenne Finish Color space Toda 3D Transforms and Coordinate sstem Reading: Shirle ch 6 RGB and HSV Green(,,)
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
To Do. Motivation. Demo (Projection Tutorial) What we ve seen so far. Computer Graphics. Summary: The Whole Viewing Pipeline
 What we ve seen so far. Computer Graphics. Summary: The Whole Viewing Pipeline") Computer Graphics CSE 67 [Win 9], Lecture 5: Viewing Ravi Ramamoorthi http://viscomp.ucsd.edu/classes/cse67/wi9 To Do Questions/concerns about assignment? Remember it is due tomorrow! (Jan 6). Ask me or
Computer Graphics CSE 67 [Win 9], Lecture 5: Viewing Ravi Ramamoorthi http://viscomp.ucsd.edu/classes/cse67/wi9 To Do Questions/concerns about assignment? Remember it is due tomorrow! (Jan 6). Ask me or
4. Two Dimensional Transformations
 4. Two Dimensional Transformations CS362 Introduction to Computer Graphics Helena Wong, 2 In man applications, changes in orientations, sizes, and shapes are accomplished with geometric transformations
4. Two Dimensional Transformations CS362 Introduction to Computer Graphics Helena Wong, 2 In man applications, changes in orientations, sizes, and shapes are accomplished with geometric transformations
CS F-07 Objects in 2D 1
 CS420-2010F-07 Objects in 2D 1 07-0: Representing Polgons We want to represent a simple polgon Triangle, rectangle, square, etc Assume for the moment our game onl uses these simple shapes No curves for
CS420-2010F-07 Objects in 2D 1 07-0: Representing Polgons We want to represent a simple polgon Triangle, rectangle, square, etc Assume for the moment our game onl uses these simple shapes No curves for
Image Warping. Computational Photography Derek Hoiem, University of Illinois 09/28/17. Photo by Sean Carroll
 Image Warping 9/28/7 Man slides from Alosha Efros + Steve Seitz Computational Photograph Derek Hoiem, Universit of Illinois Photo b Sean Carroll Reminder: Proj 2 due monda Much more difficult than project
Image Warping 9/28/7 Man slides from Alosha Efros + Steve Seitz Computational Photograph Derek Hoiem, Universit of Illinois Photo b Sean Carroll Reminder: Proj 2 due monda Much more difficult than project
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
[ ] [ ] Orthogonal Transformation of Cartesian Coordinates in 2D & 3D. φ = cos 1 1/ φ = tan 1 [ 2 /1]
![[ ] [ ] Orthogonal Transformation of Cartesian Coordinates in 2D & 3D. φ = cos 1 1/ φ = tan 1 [ 2 /1]](/thumbs/84/89383711.jpg "[ ] [ ] Orthogonal Transformation of Cartesian Coordinates in 2D & 3D. φ = cos 1 1/ φ = tan 1 [ 2 /1]") Orthogonal Transformation of Cartesian Coordinates in 2D & 3D A vector is specified b its coordinates, so it is defined relative to a reference frame. The same vector will have different coordinates in
Orthogonal Transformation of Cartesian Coordinates in 2D & 3D A vector is specified b its coordinates, so it is defined relative to a reference frame. The same vector will have different coordinates in
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Image Warping. Many slides from Alyosha Efros + Steve Seitz. Photo by Sean Carroll
 Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Viewing and Projection
 Viewing and Projection Sheelagh Carpendale Camera metaphor. choose camera position 2. set up and organie objects 3. choose a lens 4. take the picture View Volumes what gets into the scene perspective view
Viewing and Projection Sheelagh Carpendale Camera metaphor. choose camera position 2. set up and organie objects 3. choose a lens 4. take the picture View Volumes what gets into the scene perspective view
Transformations. Examples of transformations: shear. scaling
 Transformations Eamples of transformations: translation rotation scaling shear Transformations More eamples: reflection with respect to the y-ais reflection with respect to the origin Transformations Linear
Transformations Eamples of transformations: translation rotation scaling shear Transformations More eamples: reflection with respect to the y-ais reflection with respect to the origin Transformations Linear
Geometric Transformations
 Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Two Dimensional Viewing
 Two Dimensional Viewing Dr. S.M. Malaek Assistant: M. Younesi Two Dimensional Viewing Basic Interactive Programming Basic Interactive Programming User controls contents, structure, and appearance of objects
Two Dimensional Viewing Dr. S.M. Malaek Assistant: M. Younesi Two Dimensional Viewing Basic Interactive Programming Basic Interactive Programming User controls contents, structure, and appearance of objects
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
3D Viewing and Projec5on. Taking Pictures with a Real Camera. Steps: Graphics does the same thing for rendering an image for 3D geometric objects
 3D Vieing and Projec5on Taking Pictures ith a Real Camera Steps: Iden5 interes5ng objects Rotate and translate the camera to desired viepoint Adjust camera seings such as ocal length Choose desired resolu5on
3D Vieing and Projec5on Taking Pictures ith a Real Camera Steps: Iden5 interes5ng objects Rotate and translate the camera to desired viepoint Adjust camera seings such as ocal length Choose desired resolu5on
Image warping. image filtering: change range of image. image warping: change domain of image g(x) = f(h(x)) h(y)=0.5y+0.5. h([x,y])=[x,y/2] f h
![Image warping. image filtering: change range of image. image warping: change domain of image g(x) = f(h(x)) h(y)=0.5y+0.5. h([x,y])=[x,y/2] f h](/thumbs/71/65976347.jpg "Image warping. image filtering: change range of image. image warping: change domain of image g(x) = f(h(x)) h(y)=0.5y+0.5. h([x,y])=[x,y/2] f h") Image warping Image warping image filtering: change range of image g() () = h(f()) h(f()) f h g h()=0.5+0.5 image warping: change domain of image g() = f(h()) f h g h([,])=[,/2] Parametric (global) warping
Image warping Image warping image filtering: change range of image g() () = h(f()) h(f()) f h g h()=0.5+0.5 image warping: change domain of image g() = f(h()) f h g h([,])=[,/2] Parametric (global) warping
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
521466S Machine Vision Exercise #1 Camera models
 52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Affine and Projective Transformations
 CS 674: Intro to Computer Vision Affine and Projective Transformations Prof. Adriana Kovaska Universit of Pittsburg October 3, 26 Alignment problem We previousl discussed ow to matc features across images,
CS 674: Intro to Computer Vision Affine and Projective Transformations Prof. Adriana Kovaska Universit of Pittsburg October 3, 26 Alignment problem We previousl discussed ow to matc features across images,
3D Computer Vision II. Reminder Projective Geometry, Transformations. Nassir Navab. October 27, 2009
 3D Computer Vision II Reminder Projective Geometr, Transformations Nassir Navab based on a course given at UNC b Marc Pollefes & the book Multiple View Geometr b Hartle & Zisserman October 27, 29 2D Transformations
3D Computer Vision II Reminder Projective Geometr, Transformations Nassir Navab based on a course given at UNC b Marc Pollefes & the book Multiple View Geometr b Hartle & Zisserman October 27, 29 2D Transformations
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Image Formation I Chapter 2 (R. Szelisky)
") Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Vector Algebra Transformations. Lecture 4
 Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
Projections. Let us start with projections in 2D, because there are easier to visualize.
 Projetions Let us start ith projetions in D, beause there are easier to visualie. Projetion parallel to the -ais: Ever point in the -plane ith oordinates (, ) ill be transformed into the point ith oordinates
Projetions Let us start ith projetions in D, beause there are easier to visualie. Projetion parallel to the -ais: Ever point in the -plane ith oordinates (, ) ill be transformed into the point ith oordinates
More on Transformations. COS 426, Spring 2019 Princeton University
 More on Transformations COS 426, Spring 2019 Princeton Universit Agenda Grab-bag of topics related to transformations: General rotations! Euler angles! Rodrigues s rotation formula Maintaining camera transformations!
More on Transformations COS 426, Spring 2019 Princeton Universit Agenda Grab-bag of topics related to transformations: General rotations! Euler angles! Rodrigues s rotation formula Maintaining camera transformations!
12.4 The Ellipse. Standard Form of an Ellipse Centered at (0, 0) (0, b) (0, -b) center
 (0, b) (0, -b) center") . The Ellipse The net one of our conic sections we would like to discuss is the ellipse. We will start b looking at the ellipse centered at the origin and then move it awa from the origin. Standard Form
. The Ellipse The net one of our conic sections we would like to discuss is the ellipse. We will start b looking at the ellipse centered at the origin and then move it awa from the origin. Standard Form
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Modeling Transformations
 Modeling Transformations Thomas Funkhouser Princeton Universit CS 426, Fall 2 Modeling Transformations Specif transformations for objects Allos definitions of objects in on coordinate sstems Allos use
Modeling Transformations Thomas Funkhouser Princeton Universit CS 426, Fall 2 Modeling Transformations Specif transformations for objects Allos definitions of objects in on coordinate sstems Allos use
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Homogeneous Coordinates
 COMS W4172 3D Math 2 Steven Feiner Department of Computer Science Columbia Universit New York, NY 127 www.cs.columbia.edu/graphics/courses/csw4172 Februar 1, 218 1 Homogeneous Coordinates w X W Y X W Y
COMS W4172 3D Math 2 Steven Feiner Department of Computer Science Columbia Universit New York, NY 127 www.cs.columbia.edu/graphics/courses/csw4172 Februar 1, 218 1 Homogeneous Coordinates w X W Y X W Y
Last Lecture. Edge Detection. Filtering Pyramid
 Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam T. Roweis and William T.
Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam T. Roweis and William T.
Modeling Transformations
 Transformations Transformations Specif transformations for objects o Allos definitions of objects in on coordinate sstems o Allos use of object definition multiple times in a scene Adam Finkelstein Princeton
Transformations Transformations Specif transformations for objects o Allos definitions of objects in on coordinate sstems o Allos use of object definition multiple times in a scene Adam Finkelstein Princeton
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
3-D D Euclidean Space - Vectors
 3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
How is project #1 going?
 How is project # going? Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam
How is project # going? Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam
Transformations II. Week 2, Wed Jan 17
 Universit of British Columbia CPSC 34 Computer Graphics Jan-Apr 27 Tamara Munzner Transformations II Week 2, Wed Jan 7 http://www.ugrad.cs.ubc.ca/~cs34/vjan27 Readings for Jan 5-22 FCG Chap 6 Transformation
Universit of British Columbia CPSC 34 Computer Graphics Jan-Apr 27 Tamara Munzner Transformations II Week 2, Wed Jan 7 http://www.ugrad.cs.ubc.ca/~cs34/vjan27 Readings for Jan 5-22 FCG Chap 6 Transformation
Announcements. Introduction to Cameras. The Key to Axis Angle Rotation. Axis-Angle Form (review) Axis Angle (4 steps) Mechanics of Axis Angle
 Axis Angle (4 steps) Mechanics of Axis Angle") Ross Beerige Bruce Draper Introuction to Cameras September th 25 Announcements PA ue eek from Tuesa Q: hat i I mean b robust I/O? Hanle arious numbers of erte/face features Check for count matches Goo
Ross Beerige Bruce Draper Introuction to Cameras September th 25 Announcements PA ue eek from Tuesa Q: hat i I mean b robust I/O? Hanle arious numbers of erte/face features Check for count matches Goo
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
THE INVERSE GRAPH. Finding the equation of the inverse. What is a function? LESSON
 LESSON THE INVERSE GRAPH The reflection of a graph in the line = will be the graph of its inverse. f() f () The line = is drawn as the dotted line. Imagine folding the page along the dotted line, the two
LESSON THE INVERSE GRAPH The reflection of a graph in the line = will be the graph of its inverse. f() f () The line = is drawn as the dotted line. Imagine folding the page along the dotted line, the two
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Basic Elements. Geometry is the study of the relationships among objects in an n-dimensional space
 Basic Elements Geometry is the study of the relationships among objects in an n-dimensional space In computer graphics, we are interested in objects that exist in three dimensions We want a minimum set
Basic Elements Geometry is the study of the relationships among objects in an n-dimensional space In computer graphics, we are interested in objects that exist in three dimensions We want a minimum set
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
What does OpenGL do?
 Theor behind Geometrical Transform What does OpenGL do? So the user specifies a lot of information Ee Center Up Near, far, UP EE Left, right top, bottom, etc. f b CENTER left right top bottom What does
Theor behind Geometrical Transform What does OpenGL do? So the user specifies a lot of information Ee Center Up Near, far, UP EE Left, right top, bottom, etc. f b CENTER left right top bottom What does
Warping, Morphing and Mosaics
 Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Prof. Feng Liu. Winter /05/2019
 Prof. Feng Liu Winter 2019 http://www.cs.pd.edu/~fliu/courses/cs410/ 02/05/2019 Last Time Image alignment 2 Toda Image warping The slides for this topic are used from Prof. Yung-Yu Chuang, which use materials
Prof. Feng Liu Winter 2019 http://www.cs.pd.edu/~fliu/courses/cs410/ 02/05/2019 Last Time Image alignment 2 Toda Image warping The slides for this topic are used from Prof. Yung-Yu Chuang, which use materials
Viewing. Reading: Angel Ch.5
 Viewing Reading: Angel Ch.5 What is Viewing? Viewing transform projects the 3D model to a 2D image plane 3D Objects (world frame) Model-view (camera frame) View transform (projection frame) 2D image View
Viewing Reading: Angel Ch.5 What is Viewing? Viewing transform projects the 3D model to a 2D image plane 3D Objects (world frame) Model-view (camera frame) View transform (projection frame) 2D image View
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Augmented Reality II - Camera Calibration - Gudrun Klinker May 11, 2004
 Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Image Warping, mesh, and triangulation CSE399b, Spring 07 Computer Vision
 http://grail.cs.washington.edu/projects/rotoscoping/ Image Warping, mesh, and triangulation CSE399b, Spring 7 Computer Vision Man of the slides from A. Efros. Parametric (global) warping Eamples of parametric
http://grail.cs.washington.edu/projects/rotoscoping/ Image Warping, mesh, and triangulation CSE399b, Spring 7 Computer Vision Man of the slides from A. Efros. Parametric (global) warping Eamples of parametric
CS231M Mobile Computer Vision Structure from motion
 CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
Section 9.3: Functions and their Graphs
 Section 9.: Functions and their Graphs Graphs provide a wa of displaing, interpreting, and analzing data in a visual format. In man problems, we will consider two variables. Therefore, we will need to
Section 9.: Functions and their Graphs Graphs provide a wa of displaing, interpreting, and analzing data in a visual format. In man problems, we will consider two variables. Therefore, we will need to