Automated Driving Development
|
|
|
- Denis Cox
- 5 years ago
- Views:
Transcription

1 Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1


2 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems Jonny Andersson Senior Engineer Scania Thorsten Gerke Automotive Industry Manager EMEA MathWorks Elektronik I Fordon Congress, (Gothenburg) 2


3 1.5M km of recorded data 3+ years of driving time 12 hours re-simulation Scania: Model-Based Design and Code Generation for AEB Sensor Fusion 3
4 Voyage Develops Longitudinal Controls for Self-Driving Taxis Challenge Develop a controller that enables a self-driving car to maintain a target velocity and keep a safe distance from obstacles. Solution Use Simulink to design a longitudinal model predictive controller. Tune parameters based on experimental data imported into MATLAB. Deploy the controller as an ROS node using Robotics System Toolbox. Generate source code with Simulink Coder, and package it as a Docker container. Results Development speed tripled Easy integration with open-source software Simulink algorithms delivered as production software Voyage s self-driving car in San Jose, California. We were searching for a prototyping solution that was fast for development and robust for production. We decided to go with Simulink for controller development and code generation, while using MATLAB to automate development tasks. - Alan Mond, Voyage 4
5 How can you use MATLAB and Simulink to develop automated driving algorithms? Perception Control Planning 5
6 Examples of how you can use MATLAB and Simulink to develop automated driving algorithms Deep learning Sensor models & model predictive control Perception Control Sensor fusion with live data Path planning Planning 6
7 How can you use MATLAB and Simulink to develop perception algorithms? Deep learning Sensor models & model predictive control Perception Control Sensor fusion with live data Path planning Planning 7


8 Automated Driving System Toolbox introduced: Ground Truth Labeling App to label video data 10:45 Introduction to Automated Driving System Toolbox 8

9 Automate labeling lanes with Ground Truth Labeler 9




10 Automated Driving System Toolbox introduced examples to: Accelerate the process of Ground Truth Labeling Label detections with Ground Truth Labeler App Add your own automation algorithm to Ground Truth Labeler App Extend connectivity of Ground Truth Labeler App to visualize lidar data 10
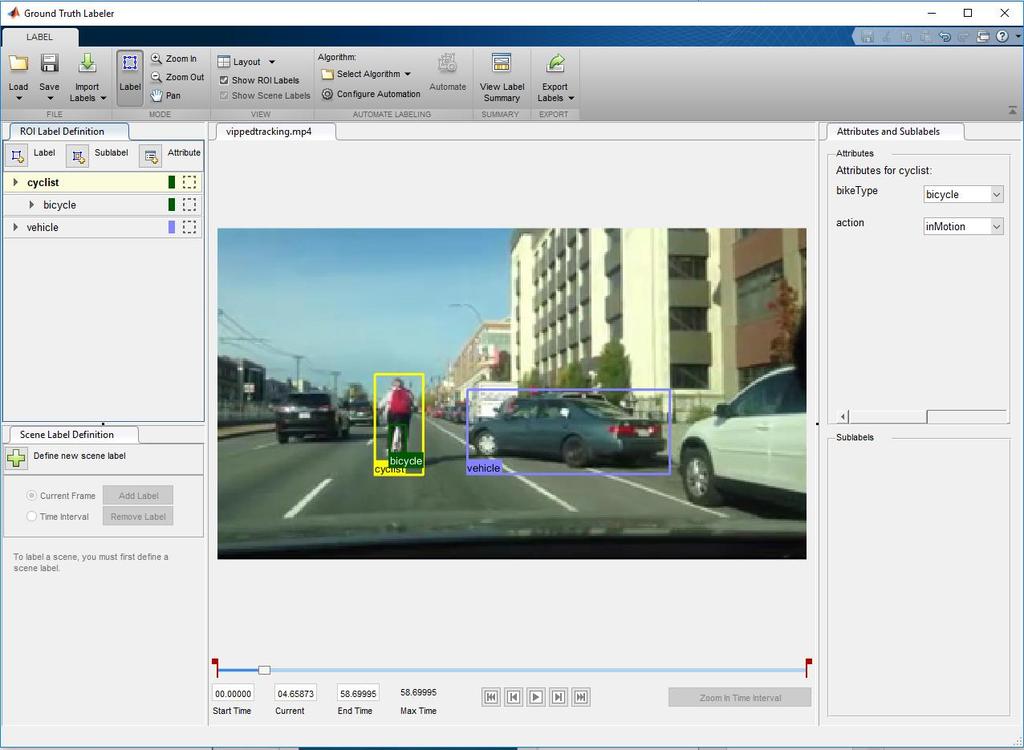
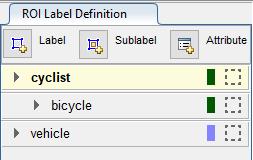

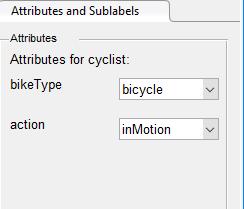
11 Specify attributes and sublabels in Ground Truth Labeler App 11

12 Automate labeling pixels with Ground Truth Labeler 12





13 Learn more about developing deep learning perception algorithms with these examples Train free space detection network using deep learning Computer Vision System Toolbox TM Add semantic segmentation automation algorithm to Ground Truth Labeler App Automated Driving System Toolbox TM Generate CUDA code to execute directed acyclic graph network on an NVIDIA GPU GPU Coder TM 14


14 Free Space Detection Using Semantic Segmentation 15
15 How can you use MATLAB and Simulink to develop perception algorithms? Deep learning Sensor models & model predictive control Perception Control Sensor fusion with live data Path planning Planning 16

16 Automated Driving System Toolbox introduced: Multi-object tracker to develop sensor fusion algorithms Multi-Object Tracker Detections Track Manager Tracking Filter Tracks Assigns detections to tracks Creates new tracks Updates existing tracks Removes old tracks Predicts and updates state of track Supports linear, extended, and unscented Kalman filters 19:27 Introduction to Automated Driving System Toolbox 17


17 Automated Driving System Toolbox introduced examples to: Develop sensor fusion algorithms with recorded data Design multi-object tracker based on logged vehicle data Generate C/C++ code from algorithm which includes a multi-object tracker 18



18 CAN How can I test my sensor fusion algorithm with live data? Radar Camera CAN Tx CAN FD IMU TCP/IP Ethernet 19


19 CAN Test forward collision warning algorithm with live data from vehicle Radar FCW application Vision Object Radar Object Camera CAN Tx CAN FD CAN Rx Lane Vehicle Speed Yaw Rate Read sensor data stream and video stream IMU TCP/IP Ethernet TCP/IP Video frame FCW algorithm Visualization 20



20 Test forward collision warning algorithm with live data from surrogate vehicle Transmitter FCW application Recorded messages Vision Object Radar Object Lane Vehicle Speed Yaw Rate CAN Tx CAN FD CAN Rx Vision Object Radar Object Lane Vehicle Speed Yaw Rate Read sensor data stream and video stream Recorded video Video frame TCP/IP Ethernet TCP/IP Video frame FCW algorithm Visualization 21
21 Send live CAN FD and TCP/IP data 22

22 Receive live CAN FD and TCP/IP data 23

23 Generate C/C++ code for algorithm 24

24 Stream live CAN FD and TCP/IP data into compiled algorithm code 25

")
25 Learn about developing sensor fusion algorithms with live data using this example Transmitter Receiver Ethernet Video stream Stream CAN FD data to prototype algorithms on your laptop Vehicle Network Toolbox TM Vector CAN Interface VN1610 CAN FD Object Lists (vision/radar/imu) 26
26 How can you use MATLAB and Simulink to develop control algorithms? Deep learning Sensor models & model predictive control Perception Control Sensor fusion with live data Path planning Planning 27

27 Automated Driving System Toolbox introduced examples to: Synthesize detections to test sensor fusion algorithms Synthesize radar detections with probabilistic impairments Synthesize vision detections with probabilistic impairments Synthesize scenario to test multi-object tracker 28



28 Automated Driving System Toolbox introduced: Radar and vision detections for closed loop simulation Release Fuse Synthesize Visualize multiobjecttracker radardetectiongenerator visiondetectiongenerator birdseyeplot 29

29 Voyage Develops Longitudinal Controls for Self-Driving Taxis Challenge Develop a controller that enables a self-driving car to maintain a target velocity and keep a safe distance from obstacles. Solution Use Simulink to design a longitudinal model predictive controller. Tune parameters based on experimental data imported into MATLAB. Deploy the controller as an ROS node using Robotics System Toolbox. Generate source code with Simulink Coder, and package it as a Docker container. Results Development speed tripled Easy integration with open-source software Simulink algorithms delivered as production software Technical Article We were searching for a prototyping solution that was fast for development and robust for production. We decided to go with Simulink for controller development and code generation, while using MATLAB to automate development tasks. - Alan Mond, Voyage Voyage s self-driving car in San Jose, California. 30


30 Simulate closed loop system with radar/vision detections, sensor fusion, and model-predictive control Adaptive Cruise Control with Sensor Fusion 31

31 Synthesize detections to test sensor fusion and model-predictive controller 32

32 Compare classical and model predictive control algorithms 33

33 Automated Driving Applications with Model Predictive Controls 34

34 Vision Detection Generator models lane detection sensor 35
35 Create highway double curve with drivingscenario Driver waypoints simulate distraction at curvature changes 36

36 Simulate distracted driver 37
37 Simulate lane keep assist at distraction events 38
38 Compare distracted and assisted results Detect lane departure and maintain lane during distraction 39
39 Simulate lane following by increasing minimum safe distance 40
40 Explore lane following results Vehicle stays within lane boundaries 41

41 Graphically edit scenarios with Driving Scenario Designer 42



42 Learn about synthesizing sensor detections to develop control algorithms with these examples Simulate and generate C++ for model-predictive control and sensor fusion algorithms Simulate and generate C++ for model-predictive control with lane detections Edit roads, cuboid actors, and sensors with Driving Scenario Designer App drivingscenariodesigner 43



43 Learn about modeling vehicle dynamics to develop control algorithms with these examples Simulate vehicle dynamics for closed loop design Vehicle Dynamics Blockset TM Co-simulate with Unreal Engine and to set actor positions get camera image Vehicle Dynamics Blockset TM 44
44 How can you use MATLAB and Simulink to develop planning algorithms? Deep learning Sensor models & model predictive control Perception Control Sensor fusion with live data Path planning Planning 45



45 Robotics System Toolbox introduced: Connectivity with the ROS ecosystem Communicate via ROS to integrate with externally authored ROS components Communication with Gazebo to visualize and simulated system Follow path for differential drive robot with ROS based simulator 46

46 We are investing in design and simulation of path planning for automobiles Rapidly-exploring Random Tree (RRT*) 47

")

47 Learn about developing path planning algorithms with these examples Plan path for automobile given pre-defined map Automated Driving System Toolbox TM Plot map tiles using World Street Map (Esri) Automated Driving System Toolbox TM Simulate V2X communication to assess channel throughput LTE System Toolbox TM 48
48 Examples of how you can use MATLAB and Simulink to develop automated driving algorithms Deep learning Sensor models & model predictive control Perception Control Sensor fusion with live data Path planning Planning 49




49 MathWorks can help you customize MATLAB and Simulink for your automated driving application Web based ground truth labeling Consulting project with Caterpillar 2017 MathWorks Automotive Conference Lidar ground truth labeling Joint presentation with Autoliv 2018 MathWorks Automotive Conference (May 2 nd, Plymouth MI) Lidar sensor model for Unreal Engine Joint paper with Ford SAE Paper


50 How can we help you can use MATLAB and Simulink to develop automated driving algorithms? Perception Control Planning 51



51 Speaker Details MANOHAR REDDY M Manohar.Reddy@mathworks.in LinkedIn: Contact MathWorks India Products/Training Enquiry Booth Call: info@mathworks.in Your feedback is valued. Please complete the feedback form provided to you. 52
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Automated Driving System Toolbox 소개
 1 Automated Driving System Toolbox 소개 이제훈차장 2017 The MathWorks, Inc. 2 Common Questions from Automated Driving Engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010 0101010100101010101001
1 Automated Driving System Toolbox 소개 이제훈차장 2017 The MathWorks, Inc. 2 Common Questions from Automated Driving Engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010 0101010100101010101001
Introduction to Automated Driving System Toolbox: Design and Verify Perception Systems
 Introduction to Automated Driving System Toolbox: Design and Verify Perception Systems Mark Corless Industry Marketing Automated Driving Segment Manager 2017 The MathWorks, Inc. 1 Some common questions
Introduction to Automated Driving System Toolbox: Design and Verify Perception Systems Mark Corless Industry Marketing Automated Driving Segment Manager 2017 The MathWorks, Inc. 1 Some common questions
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Case study: Vision and radar-based sensor fusion
 Automated Driving System Toolbox Case study: Vision and radar-based sensor fusion Seo-Wook Park Principal Application Engineer The MathWorks, Inc. 2017 The MathWorks, Inc. 1 Automated Driving System Toolbox
Automated Driving System Toolbox Case study: Vision and radar-based sensor fusion Seo-Wook Park Principal Application Engineer The MathWorks, Inc. 2017 The MathWorks, Inc. 1 Automated Driving System Toolbox
Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps
 SAN JOSE MAY 8-11, 2017 Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps Nicolas du Lac CEO, Intempora Brief introduction about Intempora Intempora Software editor
SAN JOSE MAY 8-11, 2017 Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps Nicolas du Lac CEO, Intempora Brief introduction about Intempora Intempora Software editor
다중센서기반자율시스템의모델설계및개발 이제훈차장 The MathWorks, Inc. 2
 1 다중센서기반자율시스템의모델설계및개발 이제훈차장 2017 The MathWorks, Inc. 2 What we will see today 3 Functional Segmentation of Autonomous System Aircraft/ Platform Sense Perceive Plan & Decide Control Connect/ Communicate
1 다중센서기반자율시스템의모델설계및개발 이제훈차장 2017 The MathWorks, Inc. 2 What we will see today 3 Functional Segmentation of Autonomous System Aircraft/ Platform Sense Perceive Plan & Decide Control Connect/ Communicate
A Longitudinal Control Algorithm for Smart Cruise Control with Virtual Parameters
 ISSN (e): 2250 3005 Volume, 06 Issue, 12 December 2016 International Journal of Computational Engineering Research (IJCER) A Longitudinal Control Algorithm for Smart Cruise Control with Virtual Parameters
ISSN (e): 2250 3005 Volume, 06 Issue, 12 December 2016 International Journal of Computational Engineering Research (IJCER) A Longitudinal Control Algorithm for Smart Cruise Control with Virtual Parameters
Realtime Object Detection and Segmentation for HD Mapping
 Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Deploying Deep Learning Networks to Embedded GPUs and CPUs
 Deploying Deep Learning Networks to Embedded GPUs and CPUs Rishu Gupta, PhD Senior Application Engineer, Computer Vision 2015 The MathWorks, Inc. 1 MATLAB Deep Learning Framework Access Data Design + Train
Deploying Deep Learning Networks to Embedded GPUs and CPUs Rishu Gupta, PhD Senior Application Engineer, Computer Vision 2015 The MathWorks, Inc. 1 MATLAB Deep Learning Framework Access Data Design + Train
RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms
 Philippe / 30 min dspace Technology Conference Plymouth, Michigan October 17th 2017 RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms Nicolas du Lac
Philippe / 30 min dspace Technology Conference Plymouth, Michigan October 17th 2017 RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms Nicolas du Lac
Designing GPU-accelerated applications with RTMaps (Real-Time Multisensor Applications) Framework and NVIDIA DriveWorks
 Framework and NVIDIA DriveWorks") MUNICH OCT 10-12, 2017 Designing GPU-accelerated applications with RTMaps (Real-Time Multisensor Applications) Framework and NVIDIA DriveWorks Xavier Rouah Lead Software Engineer Brief introduction about
MUNICH OCT 10-12, 2017 Designing GPU-accelerated applications with RTMaps (Real-Time Multisensor Applications) Framework and NVIDIA DriveWorks Xavier Rouah Lead Software Engineer Brief introduction about
Designing a Pick and Place Robotics Application Using MATLAB and Simulink
 Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Sensory Augmentation for Increased Awareness of Driving Environment
 Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
SHRP 2 Safety Research Symposium July 27, Site-Based Video System Design and Development: Research Plans and Issues
 SHRP 2 Safety Research Symposium July 27, 2007 Site-Based Video System Design and Development: Research Plans and Issues S09 Objectives Support SHRP2 program research questions: Establish crash surrogates
SHRP 2 Safety Research Symposium July 27, 2007 Site-Based Video System Design and Development: Research Plans and Issues S09 Objectives Support SHRP2 program research questions: Establish crash surrogates
TomTom Innovation. Hans Aerts VP Software Development Business Unit Automotive November 2015
 TomTom Innovation Hans Aerts VP Software Development Business Unit Automotive November 2015 Empower Movement Simplify complex technology From A to BE Innovative solutions Maps Consumer Connect people and
TomTom Innovation Hans Aerts VP Software Development Business Unit Automotive November 2015 Empower Movement Simplify complex technology From A to BE Innovative solutions Maps Consumer Connect people and
Object Fusion for an Advanced Emergency Braking System (AEBS) Jonny Andersson
 Jonny Andersson") Object Fusion for an Advanced Emergency Braking System (AEBS) Agenda 1. Rear- end collisions & EU legislation 2. How the AEB system works 3. Object fusion methods 4. Simulink implementation 5. Sensor visualisation
Object Fusion for an Advanced Emergency Braking System (AEBS) Agenda 1. Rear- end collisions & EU legislation 2. How the AEB system works 3. Object fusion methods 4. Simulink implementation 5. Sensor visualisation
Sensor Fusion Using Synthetic Radar and Vision Data
 Sensor Fusion Using Synthetic Radar and Vision Data Sensor fusion and control algorithms for automated driving systems require rigorous testing. Vehicle-based testing is not only time consuming to set
Sensor Fusion Using Synthetic Radar and Vision Data Sensor fusion and control algorithms for automated driving systems require rigorous testing. Vehicle-based testing is not only time consuming to set
Advanced Driver Assistance: Modular Image Sensor Concept
 Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Forward Collision Warning Using Sensor Fusion
 Forward Collision Warning Using Sensor Fusion Automated driving systems use vision, radar, ultrasound, and combinations of sensor technologies to automate dynamic driving tasks. These tasks include steering,
Forward Collision Warning Using Sensor Fusion Automated driving systems use vision, radar, ultrasound, and combinations of sensor technologies to automate dynamic driving tasks. These tasks include steering,
컴퓨터비전의최신기술 : Deep Learning, 3D Vision and Embedded Vision
 1 컴퓨터비전의최신기술 : Deep Learning, 3D Vision and Embedded Vision 김종남 Application Engineer 2017 The MathWorks, Inc. 2 Three Main Topics New capabilities for computer vision system design: Deep Learning 3-D Vision
1 컴퓨터비전의최신기술 : Deep Learning, 3D Vision and Embedded Vision 김종남 Application Engineer 2017 The MathWorks, Inc. 2 Three Main Topics New capabilities for computer vision system design: Deep Learning 3-D Vision
Map Guided Lane Detection Alexander Döbert 1,2, Andre Linarth 1,2, Eva Kollorz 2
 Map Guided Lane Detection Alexander Döbert 1,2, Andre Linarth 1,2, Eva Kollorz 2 1 Elektrobit Automotive GmbH, Am Wolfsmantel 46, 91058 Erlangen, Germany {AndreGuilherme.Linarth, Alexander.Doebert}@elektrobit.com
Map Guided Lane Detection Alexander Döbert 1,2, Andre Linarth 1,2, Eva Kollorz 2 1 Elektrobit Automotive GmbH, Am Wolfsmantel 46, 91058 Erlangen, Germany {AndreGuilherme.Linarth, Alexander.Doebert}@elektrobit.com
Applying AI to Mapping
 Applying AI to Mapping Dr. Ryan Wolcott Manager, Simultaneous Localization and Mapping (SLAM) 1 TRI: Who We Are Our mission is to improve the quality of human life through advances in artificial intelligence,
Applying AI to Mapping Dr. Ryan Wolcott Manager, Simultaneous Localization and Mapping (SLAM) 1 TRI: Who We Are Our mission is to improve the quality of human life through advances in artificial intelligence,
A multilevel simulation framework for highly automated harvest processes enabled by environmental sensor systems
 A multilevel simulation framework for highly automated harvest processes enabled by environmental sensor systems Jannik Redenius, M.Sc., Matthias Dingwerth, M.Sc., Prof. Dr. Arno Ruckelshausen, Faculty
A multilevel simulation framework for highly automated harvest processes enabled by environmental sensor systems Jannik Redenius, M.Sc., Matthias Dingwerth, M.Sc., Prof. Dr. Arno Ruckelshausen, Faculty
AUTOMATED GENERATION OF VIRTUAL DRIVING SCENARIOS FROM TEST DRIVE DATA
 F2014-ACD-014 AUTOMATED GENERATION OF VIRTUAL DRIVING SCENARIOS FROM TEST DRIVE DATA 1 Roy Bours (*), 1 Martijn Tideman, 2 Ulrich Lages, 2 Roman Katz, 2 Martin Spencer 1 TASS International, Rijswijk, The
F2014-ACD-014 AUTOMATED GENERATION OF VIRTUAL DRIVING SCENARIOS FROM TEST DRIVE DATA 1 Roy Bours (*), 1 Martijn Tideman, 2 Ulrich Lages, 2 Roman Katz, 2 Martin Spencer 1 TASS International, Rijswijk, The
Simulation: A Must for Autonomous Driving
 Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA
Simulation: A Must for Autonomous Driving NVIDIA GTC 2018 (SILICON VALLEY) / Talk ID: S8859 Rohit Ramanna Business Development Manager Smart Virtual Prototyping, ESI North America Rodolphe Tchalekian EMEA
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 What s New in Release 2015a and 2014b Young Joon Lee Principal Application Engineer 2015 The MathWorks, Inc. 2 Agenda New Features Graphics and Data Design Performance Design
2015 The MathWorks, Inc. 1 What s New in Release 2015a and 2014b Young Joon Lee Principal Application Engineer 2015 The MathWorks, Inc. 2 Agenda New Features Graphics and Data Design Performance Design
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Advanced Driver Assistance Systems: A Cost-Effective Implementation of the Forward Collision Warning Module
 Advanced Driver Assistance Systems: A Cost-Effective Implementation of the Forward Collision Warning Module www.lnttechservices.com Table of Contents Abstract 03 Introduction 03 Solution Overview 03 Output
Advanced Driver Assistance Systems: A Cost-Effective Implementation of the Forward Collision Warning Module www.lnttechservices.com Table of Contents Abstract 03 Introduction 03 Solution Overview 03 Output
Tooling Overview ADAS - Status & Ongoing Developments
 Tooling Overview ADAS - Status & Ongoing Developments Vector India Conference 2017 V0.1 2017-07-04 ADAS solution - Efficient development of multisensor applications Contents of Vector ADAS solution algorithm
Tooling Overview ADAS - Status & Ongoing Developments Vector India Conference 2017 V0.1 2017-07-04 ADAS solution - Efficient development of multisensor applications Contents of Vector ADAS solution algorithm
Attack Resilient State Estimation for Vehicular Systems
 December 15 th 2013. T-SET Final Report Attack Resilient State Estimation for Vehicular Systems Nicola Bezzo (nicbezzo@seas.upenn.edu) Prof. Insup Lee (lee@cis.upenn.edu) PRECISE Center University of Pennsylvania
December 15 th 2013. T-SET Final Report Attack Resilient State Estimation for Vehicular Systems Nicola Bezzo (nicbezzo@seas.upenn.edu) Prof. Insup Lee (lee@cis.upenn.edu) PRECISE Center University of Pennsylvania
Hardware and Software Co-Design for Motor Control Applications
 Hardware and Software Co-Design for Motor Control Applications Gaurav Dubey Durvesh Kulkarni 2015 The MathWorks, Inc. 1 Key trend: Increasing demands from motor drives Advanced algorithms require faster
Hardware and Software Co-Design for Motor Control Applications Gaurav Dubey Durvesh Kulkarni 2015 The MathWorks, Inc. 1 Key trend: Increasing demands from motor drives Advanced algorithms require faster
Layer-based Multi-sensor Fusion Architecture for Cooperative and Automated Driving Application Development
 Layer-based Multi-sensor Fusion Architecture for Cooperative and Automated Driving Application Development TNO, integrated vehicle safety (IVS), the Netherlands dr.ir. dr.ir. Tjerk Bijlsma ir. Frank Ophelders
Layer-based Multi-sensor Fusion Architecture for Cooperative and Automated Driving Application Development TNO, integrated vehicle safety (IVS), the Netherlands dr.ir. dr.ir. Tjerk Bijlsma ir. Frank Ophelders
Autonomous Driving Solutions
 Autonomous Driving Solutions Oct, 2017 DrivePX2 & DriveWorks Marcus Oh (moh@nvidia.com) Sr. Solution Architect, NVIDIA This work is licensed under a Creative Commons Attribution-Share Alike 4.0 (CC BY-SA
Autonomous Driving Solutions Oct, 2017 DrivePX2 & DriveWorks Marcus Oh (moh@nvidia.com) Sr. Solution Architect, NVIDIA This work is licensed under a Creative Commons Attribution-Share Alike 4.0 (CC BY-SA
Cloud-based Large Scale Video Analysis
 Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
Cloud-based Large Scale Video Analysis Marcos Nieto Principal Researcher Vicomtech-IK4 Joachim Kreikemeier Manager V-Drive Valeo Schalter und Sensoren GmbH INDEX 1. Cloud-LSVA project 2. ADAS validation
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 개발에서구현까지 MATLAB 환경에서의딥러닝 김종남 Application Engineer 2015 The MathWorks, Inc. 2 3 Why MATLAB for Deep Learning? MATLAB is Productive MATLAB is Fast MATLAB Integrates with Open Source
2015 The MathWorks, Inc. 1 개발에서구현까지 MATLAB 환경에서의딥러닝 김종남 Application Engineer 2015 The MathWorks, Inc. 2 3 Why MATLAB for Deep Learning? MATLAB is Productive MATLAB is Fast MATLAB Integrates with Open Source
An Efficient Algorithm for Forward Collision Warning Using Low Cost Stereo Camera & Embedded System on Chip
 An Efficient Algorithm for Forward Collision Warning Using Low Cost Stereo Camera & Embedded System on Chip 1 Manoj Rajan, 2 Prabhudev Patil, and 3 Sravya Vunnam 1 Tata Consultancy Services manoj.cr@tcs.com;
An Efficient Algorithm for Forward Collision Warning Using Low Cost Stereo Camera & Embedded System on Chip 1 Manoj Rajan, 2 Prabhudev Patil, and 3 Sravya Vunnam 1 Tata Consultancy Services manoj.cr@tcs.com;
AUTOMATIC PARKING OF SELF-DRIVING CAR BASED ON LIDAR
 AUTOMATIC PARKING OF SELF-DRIVING CAR BASED ON LIDAR Bijun Lee a, Yang Wei a, I. Yuan Guo a a State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University,
AUTOMATIC PARKING OF SELF-DRIVING CAR BASED ON LIDAR Bijun Lee a, Yang Wei a, I. Yuan Guo a a State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University,
Visual Perception Using Monocular Camera
 Visual Perception Using Monocular Camera Automated Driving System Toolbox provides a suite of computer vision algorithms that use data from cameras to detect and track objects of interest such as lane
Visual Perception Using Monocular Camera Automated Driving System Toolbox provides a suite of computer vision algorithms that use data from cameras to detect and track objects of interest such as lane
Examining future priorities for cyber security management
 Examining future priorities for cyber security management Cybersecurity Focus Day Insurance Telematics 16 Andrew Miller Chief Technical Officer Thatcham Research Owned by the major UK Motor Insurers with
Examining future priorities for cyber security management Cybersecurity Focus Day Insurance Telematics 16 Andrew Miller Chief Technical Officer Thatcham Research Owned by the major UK Motor Insurers with
Accelerating solutions for highway safety, renewal, reliability, and capacity. Connected Vehicles and the Future of Transportation
 Accelerating solutions for highway safety, renewal, reliability, and capacity Regional Operations Forums Connected Vehicles and the Future of Transportation ti Session Overview What are connected and automated
Accelerating solutions for highway safety, renewal, reliability, and capacity Regional Operations Forums Connected Vehicles and the Future of Transportation ti Session Overview What are connected and automated
Designing a software framework for automated driving. Dr.-Ing. Sebastian Ohl, 2017 October 12 th
 Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications ESRI International Users Conference July 2012 Table Of Contents Connected Vehicle Program Goals Mapping
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications ESRI International Users Conference July 2012 Table Of Contents Connected Vehicle Program Goals Mapping
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices
 Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
개발과정에서의 MATLAB 과 C 의연동 ( 영상처리분야 )
") 개발과정에서의 MATLAB 과 C 의연동 ( 영상처리분야 ) Application Engineer Caleb Kim 2016 The MathWorks, Inc. 1 Algorithm Development with MATLAB for C/C++ Programmers Objectives Use MATLAB throughout algorithm development
개발과정에서의 MATLAB 과 C 의연동 ( 영상처리분야 ) Application Engineer Caleb Kim 2016 The MathWorks, Inc. 1 Algorithm Development with MATLAB for C/C++ Programmers Objectives Use MATLAB throughout algorithm development
System Requirements & Platform Availability by Product for R2016b
 & Platform Availability by Product for R2016b View general system requirements. Product Aerospace Blockset Requires Aerospace Control recommended Aerospace Antenna RF recommended Phased Array recommended
& Platform Availability by Product for R2016b View general system requirements. Product Aerospace Blockset Requires Aerospace Control recommended Aerospace Antenna RF recommended Phased Array recommended
EB TechPaper. EB Assist Car Data Recorder Innovative test drive support. automotive.elektrobit.com
 EB TechPaper EB Assist Car Data Recorder Innovative test drive support automotive.elektrobit.com Elektrobit Automotive has developed a new solution that supports vehicle manufacturers and suppliers in
EB TechPaper EB Assist Car Data Recorder Innovative test drive support automotive.elektrobit.com Elektrobit Automotive has developed a new solution that supports vehicle manufacturers and suppliers in
Demystifying Deep Learning
 Demystifying Deep Learning Let the computers do the hard work Jérémy Huard 2015 The MathWorks, Inc. 1 2 Why MATLAB for Deep Learning? MATLAB is Productive MATLAB is Fast MATLAB Integrates with Open Source
Demystifying Deep Learning Let the computers do the hard work Jérémy Huard 2015 The MathWorks, Inc. 1 2 Why MATLAB for Deep Learning? MATLAB is Productive MATLAB is Fast MATLAB Integrates with Open Source
Prototyping the Autonomous Future Joe Cassar, Engineering Group Manager. dspace Inc Pontiac Trail, Wixom, MI 48393
 Prototyping the Autonomous Future Joe Cassar, Engineering Group Manager dspace Inc 50131 Pontiac Trail, Wixom, MI 48393 2 What s the Common Denominator? Ford AUDI RS7 Concept Nissan Porsche ZF 3 MicroAutobox
Prototyping the Autonomous Future Joe Cassar, Engineering Group Manager dspace Inc 50131 Pontiac Trail, Wixom, MI 48393 2 What s the Common Denominator? Ford AUDI RS7 Concept Nissan Porsche ZF 3 MicroAutobox
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE. Dennis Lui August 2017
 DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
What s New in MATLAB and Simulink
 What s New in MATLAB Simulink Fabrizio Sara 2015 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers scientists deploy algorithms
What s New in MATLAB Simulink Fabrizio Sara 2015 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers scientists deploy algorithms
SOLUTIONS FOR TESTING CAMERA-BASED ADVANCED DRIVER ASSISTANCE SYSTEMS SOLUTIONS FOR VIRTUAL TEST DRIVING
 SOLUTIONS FOR TESTING CAMERA-BASED ADVANCED DRIVER ASSISTANCE SYSTEMS SOLUTIONS FOR VIRTUAL TEST DRIVING Table of Contents Motivation... 3 Requirements... 3 Solutions at a Glance... 4 Video Data Stream...
SOLUTIONS FOR TESTING CAMERA-BASED ADVANCED DRIVER ASSISTANCE SYSTEMS SOLUTIONS FOR VIRTUAL TEST DRIVING Table of Contents Motivation... 3 Requirements... 3 Solutions at a Glance... 4 Video Data Stream...
Accelerating Simulink Optimization, Code Generation & Test Automation Through Parallelization
 Accelerating Simulink Optimization, Code Generation & Test Automation Through Parallelization Ryan Chladny Application Engineering May 13 th, 2014 2014 The MathWorks, Inc. 1 Design Challenge: Electric
Accelerating Simulink Optimization, Code Generation & Test Automation Through Parallelization Ryan Chladny Application Engineering May 13 th, 2014 2014 The MathWorks, Inc. 1 Design Challenge: Electric
Demystifying Deep Learning
 Demystifying Deep Learning Mandar Gujrathi Mandar.Gujrathi@mathworks.com.au 2015 The MathWorks, Inc. 1 2 Deep Learning Applications Voice assistants (speech to text) Teaching character to beat video game
Demystifying Deep Learning Mandar Gujrathi Mandar.Gujrathi@mathworks.com.au 2015 The MathWorks, Inc. 1 2 Deep Learning Applications Voice assistants (speech to text) Teaching character to beat video game
ADAS: A Safe Eye on The Road
 ADAS: A Safe Eye on The Road FTF-AUT-F0334 Allan McAuslin Product Manager A P R. 2 0 1 4 TM External Use Mobility Innovation Factors Cleaner world Safer World Secure Connectivity Mobility for everyone
ADAS: A Safe Eye on The Road FTF-AUT-F0334 Allan McAuslin Product Manager A P R. 2 0 1 4 TM External Use Mobility Innovation Factors Cleaner world Safer World Secure Connectivity Mobility for everyone
Solid State LiDAR for Ubiquitous 3D Sensing
 April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
ILR Perception System Using Stereo Vision and Radar
 ILR - 11 Perception System Using Stereo Vision and Radar Team A - Amit Agarwal Harry Golash, Yihao Qian, Menghan Zhang, Zihao (Theo) Zhang Sponsored by: Delphi Automotive April 18, 2017 Table of Contents
ILR - 11 Perception System Using Stereo Vision and Radar Team A - Amit Agarwal Harry Golash, Yihao Qian, Menghan Zhang, Zihao (Theo) Zhang Sponsored by: Delphi Automotive April 18, 2017 Table of Contents
Jo-Car2 Autonomous Mode. Path Planning (Cost Matrix Algorithm)
") Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
TIOVX TI s OpenVX Implementation
 TIOVX TI s OpenVX Implementation Aish Dubey Product Marketing, Automotive Processors Embedded Vision Summit, 3 May 2017 1 TI SOC platform heterogeneous cores High level processing Object detection and
TIOVX TI s OpenVX Implementation Aish Dubey Product Marketing, Automotive Processors Embedded Vision Summit, 3 May 2017 1 TI SOC platform heterogeneous cores High level processing Object detection and
Vision Based Tangent Point Detection Algorithm, Evaluation and Validation
 15-6 MVA2009 IAPR Conference on Machine Vision Applications, May 20-22, 2009, Yokohama, JAPAN Vision Based Tangent Point Detection Algorithm, Evaluation and Validation Romain Gallen romain.gallen@lcpc.fr
15-6 MVA2009 IAPR Conference on Machine Vision Applications, May 20-22, 2009, Yokohama, JAPAN Vision Based Tangent Point Detection Algorithm, Evaluation and Validation Romain Gallen romain.gallen@lcpc.fr
A NEW COMPUTING ERA. Shanker Trivedi Senior Vice President Enterprise Business at NVIDIA
 A NEW COMPUTING ERA Shanker Trivedi Senior Vice President Enterprise Business at NVIDIA THE ERA OF AI AI CLOUD MOBILE PC 2 TWO FORCES DRIVING THE FUTURE OF COMPUTING 10 7 Transistors (thousands) 10 5 1.1X
A NEW COMPUTING ERA Shanker Trivedi Senior Vice President Enterprise Business at NVIDIA THE ERA OF AI AI CLOUD MOBILE PC 2 TWO FORCES DRIVING THE FUTURE OF COMPUTING 10 7 Transistors (thousands) 10 5 1.1X
A real-time Road Boundary Detection Algorithm Based on Driverless Cars Xuekui ZHU. , Meijuan GAO2, b, Shangnian LI3, c
 4th National Conference on Electrical, Electronics and Computer Engineering (NCEECE 2015) A real-time Road Boundary Detection Algorithm Based on Driverless Cars Xuekui ZHU 1, a, Meijuan GAO2, b, Shangnian
4th National Conference on Electrical, Electronics and Computer Engineering (NCEECE 2015) A real-time Road Boundary Detection Algorithm Based on Driverless Cars Xuekui ZHU 1, a, Meijuan GAO2, b, Shangnian
Embarquez votre Intelligence Artificielle (IA) sur CPU, GPU et FPGA
 sur CPU, GPU et FPGA") Embarquez votre Intelligence Artificielle (IA) sur CPU, GPU et FPGA Pierre Nowodzienski Engineer pierre.nowodzienski@mathworks.fr 2018 The MathWorks, Inc. 1 From Data to Business value Make decisions Get
Embarquez votre Intelligence Artificielle (IA) sur CPU, GPU et FPGA Pierre Nowodzienski Engineer pierre.nowodzienski@mathworks.fr 2018 The MathWorks, Inc. 1 From Data to Business value Make decisions Get
Verification of Collision Avoidance Functionality A mileage multiplier approach to verify future Collision Avoidance Systems
 Verification of Collision Avoidance Functionality A mileage multiplier approach to verify future Collision Avoidance Systems Master of Science Thesis in the Master Degree Programme Systems, Control and
Verification of Collision Avoidance Functionality A mileage multiplier approach to verify future Collision Avoidance Systems Master of Science Thesis in the Master Degree Programme Systems, Control and
> Acoustical feedback in the form of a beep with increasing urgency with decreasing distance to an obstacle
 PARKING ASSIST TESTING THE MEASURABLE DIFFERENCE. > Creation of complex 2-dimensional objects > Online distance calculations between moving and stationary objects > Creation of Automatic Points of Interest
PARKING ASSIST TESTING THE MEASURABLE DIFFERENCE. > Creation of complex 2-dimensional objects > Online distance calculations between moving and stationary objects > Creation of Automatic Points of Interest
Arccore AB 2017, all rights reserved. Accelerating innovation
 2017-03-02 Arccore AB 2017, all rights reserved Accelerating innovation ARCCORE in brief Independent vendor of automotive-sw with focus on AUTOSAR Integration, adaptation and service Incorporated 2009
2017-03-02 Arccore AB 2017, all rights reserved Accelerating innovation ARCCORE in brief Independent vendor of automotive-sw with focus on AUTOSAR Integration, adaptation and service Incorporated 2009
Stochastic Road Shape Estimation, B. Southall & C. Taylor. Review by: Christopher Rasmussen
 Stochastic Road Shape Estimation, B. Southall & C. Taylor Review by: Christopher Rasmussen September 26, 2002 Announcements Readings for next Tuesday: Chapter 14-14.4, 22-22.5 in Forsyth & Ponce Main Contributions
Stochastic Road Shape Estimation, B. Southall & C. Taylor Review by: Christopher Rasmussen September 26, 2002 Announcements Readings for next Tuesday: Chapter 14-14.4, 22-22.5 in Forsyth & Ponce Main Contributions
Designing and Prototyping Digital Systems on SoC FPGA The MathWorks, Inc. 1
 Designing and Prototyping Digital Systems on SoC FPGA Hitu Sharma Application Engineer Vinod Thomas Sr. Training Engineer 2015 The MathWorks, Inc. 1 What is an SoC FPGA? A typical SoC consists of- A microcontroller,
Designing and Prototyping Digital Systems on SoC FPGA Hitu Sharma Application Engineer Vinod Thomas Sr. Training Engineer 2015 The MathWorks, Inc. 1 What is an SoC FPGA? A typical SoC consists of- A microcontroller,
Korea Autonomous Vehicle Contest 2013
 Korea Autonomous Vehicle Contest 2013 Smart Mobility Team (RTOS Lab. & Dyros Lab.) Graduate School of Convergence Science and Technology Seoul National University Page 1 Contents 1. Contest Information
Korea Autonomous Vehicle Contest 2013 Smart Mobility Team (RTOS Lab. & Dyros Lab.) Graduate School of Convergence Science and Technology Seoul National University Page 1 Contents 1. Contest Information
Autonomous navigation in industrial cluttered environments using embedded stereo-vision
 Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell
 Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell 11 th Oct 2018 2 Contents Our Vision Of Smarter Transport Company introduction and journey so far Advanced
Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell 11 th Oct 2018 2 Contents Our Vision Of Smarter Transport Company introduction and journey so far Advanced
Connected Car. Dr. Sania Irwin. Head of Systems & Applications May 27, Nokia Solutions and Networks 2014 For internal use
 Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
MAC + PHY Modeling & Multilayer Simulation of DSRC V2V Network
 MAC + PHY Modeling & Multilayer Simulation of DSRC V2V Network Cynthia Cudicini - MathWorks 2015 The MathWorks, Inc. 1 Vehicular Communications Vehicle-to-Vehicle (V2V) Vehicle-to-Infrastructure (V2I)
MAC + PHY Modeling & Multilayer Simulation of DSRC V2V Network Cynthia Cudicini - MathWorks 2015 The MathWorks, Inc. 1 Vehicular Communications Vehicle-to-Vehicle (V2V) Vehicle-to-Infrastructure (V2I)
What s New in MATLAB May 16, 2017
 What s New in MATLAB May 16, 2017 2017 The MathWorks, Inc. 1 Agenda MATLAB Foundation Working with Data Building & Sharing MATLAB Applications Application Specific Enhancements Summary and Wrap-up 2 Agenda
What s New in MATLAB May 16, 2017 2017 The MathWorks, Inc. 1 Agenda MATLAB Foundation Working with Data Building & Sharing MATLAB Applications Application Specific Enhancements Summary and Wrap-up 2 Agenda
Developing Optimization Algorithms for Real-World Applications
 Developing Optimization Algorithms for Real-World Applications Gautam Ponnappa PC Training Engineer Viju Ravichandran, PhD Education Technical Evangelist 2015 The MathWorks, Inc. 1 2 For a given system,
Developing Optimization Algorithms for Real-World Applications Gautam Ponnappa PC Training Engineer Viju Ravichandran, PhD Education Technical Evangelist 2015 The MathWorks, Inc. 1 2 For a given system,
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 C/C++ 사용자를위한 MATLAB 활용 : 알고리즘개발및검증 이웅재부장 2015 The MathWorks, Inc. 2 Signal Processing Algorithm Design with C/C++ Specification Algorithm Development C/C++ Testing & Debugging
2015 The MathWorks, Inc. 1 C/C++ 사용자를위한 MATLAB 활용 : 알고리즘개발및검증 이웅재부장 2015 The MathWorks, Inc. 2 Signal Processing Algorithm Design with C/C++ Specification Algorithm Development C/C++ Testing & Debugging
LANE DEPARTURE WARNING SYSTEM FOR VEHICLE SAFETY
 LANE DEPARTURE WARNING SYSTEM FOR VEHICLE SAFETY 1 K. Sravanthi, 2 Mrs. Ch. Padmashree 1 P.G. Scholar, 2 Assistant Professor AL Ameer College of Engineering ABSTRACT In Malaysia, the rate of fatality due
LANE DEPARTURE WARNING SYSTEM FOR VEHICLE SAFETY 1 K. Sravanthi, 2 Mrs. Ch. Padmashree 1 P.G. Scholar, 2 Assistant Professor AL Ameer College of Engineering ABSTRACT In Malaysia, the rate of fatality due
Arm Technology in Automotive Geely Automotive Shanghai Innovation Center
 Arm Technology in Automotive Geely Automotive Shanghai Innovation Center 2018/10/22 Shanghai GIC(Geely Innovation Center)Brief Introduction Innovation Center (Belongs to GRI) Vision: To be world-leading
Arm Technology in Automotive Geely Automotive Shanghai Innovation Center 2018/10/22 Shanghai GIC(Geely Innovation Center)Brief Introduction Innovation Center (Belongs to GRI) Vision: To be world-leading
What s New in MATLAB and Simulink
 What s New in MATLAB Simulink Selmane Sekkai - Cynthia Cudicini Application Engineering selmane.sekkai@mathworks.fr - cynthia.cudicini@mathworks.fr 1 Analysis Visualization Modeling Simulation Testing
What s New in MATLAB Simulink Selmane Sekkai - Cynthia Cudicini Application Engineering selmane.sekkai@mathworks.fr - cynthia.cudicini@mathworks.fr 1 Analysis Visualization Modeling Simulation Testing
REAL-TIME ROAD SIGNS RECOGNITION USING MOBILE GPU
 High-Performance Сomputing REAL-TIME ROAD SIGNS RECOGNITION USING MOBILE GPU P.Y. Yakimov Samara National Research University, Samara, Russia Abstract. This article shows an effective implementation of
High-Performance Сomputing REAL-TIME ROAD SIGNS RECOGNITION USING MOBILE GPU P.Y. Yakimov Samara National Research University, Samara, Russia Abstract. This article shows an effective implementation of
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving. Frank Schuster, Dr. Martin Haueis
 Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Hardware-Software Co-Design and Prototyping on SoC FPGAs Puneet Kumar Prateek Sikka Application Engineering Team
 Hardware-Software Co-Design and Prototyping on SoC FPGAs Puneet Kumar Prateek Sikka Application Engineering Team 2015 The MathWorks, Inc. 1 Agenda Integrated Hardware / Software Top down Workflow for SoC
Hardware-Software Co-Design and Prototyping on SoC FPGAs Puneet Kumar Prateek Sikka Application Engineering Team 2015 The MathWorks, Inc. 1 Agenda Integrated Hardware / Software Top down Workflow for SoC
Vision based autonomous driving - A survey of recent methods. -Tejus Gupta
 Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Vision based autonomous driving - A survey of recent methods -Tejus Gupta Presently, there are three major paradigms for vision based autonomous driving: Directly map input image to driving action using
Now, Near and Far: The Case For CV2X. Don Butler Executive Director Connected Vehicle Platform and Product Ford Motor Company.
 Now, Near and Far: The Case For CV2X Don Butler Executive Director Connected Vehicle Platform and Product Ford Motor Company July 2018 1 Technology evolution is inevitable Time from concept to application
Now, Near and Far: The Case For CV2X Don Butler Executive Director Connected Vehicle Platform and Product Ford Motor Company July 2018 1 Technology evolution is inevitable Time from concept to application
Evaluation of a laser-based reference system for ADAS
 23 rd ITS World Congress, Melbourne, Australia, 10 14 October 2016 Paper number ITS- EU-TP0045 Evaluation of a laser-based reference system for ADAS N. Steinhardt 1*, S. Kaufmann 2, S. Rebhan 1, U. Lages
23 rd ITS World Congress, Melbourne, Australia, 10 14 October 2016 Paper number ITS- EU-TP0045 Evaluation of a laser-based reference system for ADAS N. Steinhardt 1*, S. Kaufmann 2, S. Rebhan 1, U. Lages
Laserscanner Based Cooperative Pre-Data-Fusion
 Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Applying Lessons Learned to V2X Communications for China
 Jim Misener Director, Technical Standards Qualcomm Technologies, Inc. Applying Lessons Learned to V2X Communications for China 2013-2014 Qualcomm Technologies, Inc. and/or its affiliated companies. All
Jim Misener Director, Technical Standards Qualcomm Technologies, Inc. Applying Lessons Learned to V2X Communications for China 2013-2014 Qualcomm Technologies, Inc. and/or its affiliated companies. All
Deep learning in MATLAB From Concept to CUDA Code
 Deep learning in MATLAB From Concept to CUDA Code Roy Fahn Applications Engineer Systematics royf@systematics.co.il 03-7660111 Ram Kokku Principal Engineer MathWorks ram.kokku@mathworks.com 2017 The MathWorks,
Deep learning in MATLAB From Concept to CUDA Code Roy Fahn Applications Engineer Systematics royf@systematics.co.il 03-7660111 Ram Kokku Principal Engineer MathWorks ram.kokku@mathworks.com 2017 The MathWorks,
Dynamic Sensor-based Path Planning and Hostile Target Detection with Mobile Ground Robots. Matt Epperson Dr. Timothy Chung
 Dynamic Sensor-based Path Planning and Hostile Target Detection with Mobile Ground Robots Matt Epperson Dr. Timothy Chung Brief Bio Matt Epperson Cal Poly, San Luis Obispo Sophmore Computer Engineer NREIP
Dynamic Sensor-based Path Planning and Hostile Target Detection with Mobile Ground Robots Matt Epperson Dr. Timothy Chung Brief Bio Matt Epperson Cal Poly, San Luis Obispo Sophmore Computer Engineer NREIP
AMR 2011/2012: Final Projects
 AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
Next Generation Infotainment Systems
 Next Generation Infotainment Systems John Absmeier Director, Silicon Valley Innovation Center Digital gadgets more important for car buyers January 11, 2013 Smartphones in the Driver s Seat Never before
Next Generation Infotainment Systems John Absmeier Director, Silicon Valley Innovation Center Digital gadgets more important for car buyers January 11, 2013 Smartphones in the Driver s Seat Never before
Optical Sensors: Key Technology for the Autonomous Car
 Optical Sensors: Key Technology for the Autonomous Car Rajeev Thakur, P.E., Product Marketing Manager, Infrared Business Unit, Osram Opto Semiconductors Autonomously driven cars will combine a variety
Optical Sensors: Key Technology for the Autonomous Car Rajeev Thakur, P.E., Product Marketing Manager, Infrared Business Unit, Osram Opto Semiconductors Autonomously driven cars will combine a variety
Accelerating Innovative Design Using Low-Cost Hardware Andrew Bennett
 Accelerating Innovative Design Using Low-Cost Hardware Andrew Bennett 2015 The MathWorks, Inc. 1 Introduction Interfacing to the real-world How to do this with MATLAB and Simulink Choosing most appropriate
Accelerating Innovative Design Using Low-Cost Hardware Andrew Bennett 2015 The MathWorks, Inc. 1 Introduction Interfacing to the real-world How to do this with MATLAB and Simulink Choosing most appropriate
What is Mechatronics
 Mechatronics What is Mechatronics What Is Mechatronics? Mechatronics is a methodology used for the optimal design of electromechanical products. Multi-disciplinary system design has employed a sequential
Mechatronics What is Mechatronics What Is Mechatronics? Mechatronics is a methodology used for the optimal design of electromechanical products. Multi-disciplinary system design has employed a sequential
Deep Learning: Transforming Engineering and Science The MathWorks, Inc.
 Deep Learning: Transforming Engineering and Science 1 2015 The MathWorks, Inc. DEEP LEARNING: TRANSFORMING ENGINEERING AND SCIENCE A THE NEW RISE ERA OF OF GPU COMPUTING 3 NVIDIA A IS NEW THE WORLD S ERA
Deep Learning: Transforming Engineering and Science 1 2015 The MathWorks, Inc. DEEP LEARNING: TRANSFORMING ENGINEERING AND SCIENCE A THE NEW RISE ERA OF OF GPU COMPUTING 3 NVIDIA A IS NEW THE WORLD S ERA
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving
 Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
Detecting the Unexpected: The Path to Road Obstacles Prevention in Autonomous Driving Shmoolik Mangan, PhD Algorithms Development Manager, VAYAVISION AutonomousTech TLV Israel 2018 VAYAVISION s approach
How Microcontrollers help GPUs in Autonomous Drive
 How Microcontrollers help GPUs in Autonomous Drive GTC 2017 Munich, 2017-10-12 Hans Adlkofer, VP Automotive System department Outline 1 Main Safety concepts 2 Sensor Fusion architecture and functionalities
How Microcontrollers help GPUs in Autonomous Drive GTC 2017 Munich, 2017-10-12 Hans Adlkofer, VP Automotive System department Outline 1 Main Safety concepts 2 Sensor Fusion architecture and functionalities