Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
|
|
|
- Samuel Hines
- 5 years ago
- Views:
Transcription


1 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager 1



2 Autonomous System A system that functions independently or in a supervised manner and operates under conditions of uncertainty, in an unknown and unpredictable dynamic environment Platform Sense Mapping & Localization Planning Perception Planning Physical System + Environment Control Sensing & Perception Path Following (Control) Connect 2


3 Model-Based Design (MBD) Systematic use of models throughout the development process RESEARCH REQUIREMENTS DESIGN Environmental Models Scope: Electronic systems that interact with the physical world C, C++ Mechanical Control Algorithms Supervisory Logic IMPLEMENTATION CUDA VHDL Verilog Electrical Structured Text TEST & VERIFICATION MCU DSP GPU FPGA ASIC PLC, PAC INTEGRATION 3


4 Automated Driving - Sensors Definition Sense Camera Radar-based object detector Vision-based object detector Lidar Lane detector Inertial Measurement Unit 4

5 Multi-object tracker to develop sensor fusion algorithms Time Multi-Object Tracker State State Covariance Detections Track Manager Tracking Filter Tracks Track ID Age Is Confirmed Time Is Coasted Measurement Measurement Noise Assigns detections to tracks Creates new tracks Updates existing tracks Removes old tracks Predicts and updates state of track Supports linear, extended, and unscented Kalman filters 19:27 Introduction to Automated Driving System Toolbox 5

6 6 Fuse detections with multi-object tracker


7 What is Deep Learning? Perception Deep learning is a type of machine learning that performs end-to-end learning by learning tasks directly from images, text, and sound. 1. Train a Deep Neural Network from Scratch 2. Fine-tune a pre-trained model (transfer learning) 7


8 Network Analysis Network Analyzer Confusion Matrix 8

")
9 R-CNN Vs. Semantic Segmentation Regions with Convolutional Neural Network Features (R-CNN) Semantic Segmentation using SegNet 9
")



; Model-Predictive Control hold on;")
10 Path Planning Planning Map Initial Pose Final Pose Planner System Level Representation Path Controller Actuator Commands Probabilistic Roadmaps (PRM) Algorithm Application Area MATLAB Implementation PRM Ground Robots % Only for differential robots >> robotics.prm RRT/RRT* ADAS, Manipulators % Only for vehicles (3D) >> pathplannerrrt % RST % RST in future release %% Implicit Create A* search PRM path planner ADAS, Ground Robots planner Hybrid A* = robotics.prm; planner.map = og; Polynomial Interpolation Automotive, Ground Robots, planner.numnodes = 600; Manipulators planner.connectiondistance = 5; show(originalog); Model-Predictive Control hold on; Automotive, Humanoids % MPC Toolbox show(planner, 'Map', 'off'); >> mpc % General functions >> spline, pchip, Rapidly-exploring random tree (RRT) 10
 x t 1 y(t 1 ) x t N y(t N ) Path Controller x t y(t) Vehicle Model")
11 Path Control Control Map Initial Pose Final Pose Planner System Level Representation Path Controller Actuator Commands x t 0 y(t 0 ) x t 1 y(t 1 ) x t N y(t N ) Path Controller x t y(t) Vehicle Model 12



12 Vehicle Modeling y w x t+1 = x t + v cmd cos θ t y t+1 = y t + v cmd sin θ t θ t+1 = θ t + w cmd t x y x 13


13 Path Control Explore Built-In Algorithms Angular velocity to go from current position to the lookahead Designing a system object so you can use your algorithm interchangeably in MATLAB and Simulink: - Cross tracking errors - Closest point to a line - Lookahead instance % Create a pure pursuit object pp = robotics.purepursuit; % Assign a sequence of waypoints pp.waypoints = [0 0;1 1;3 4]; % Compute control inputs for pose [v, w] = pp([0 0 0]); 14
14 Multi-domain Simulation Connect Robotics Algorithm Low-Level Control Robot Simulation 15

15 16 Physical Modeling Environment

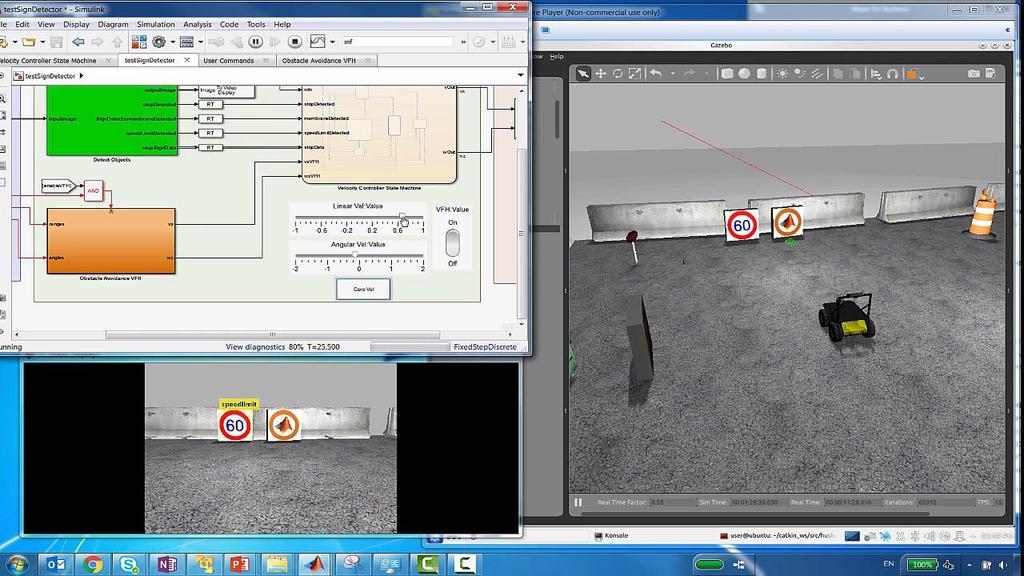
16 17 Sign Recognition with Collision Avoidance






17 Vehicle Dynamics Automotive Aerospace Game engine 18
















18 Extensive Hardware Support & Customization MATLAB & Simulink Simulink Coder Embedded Coder HDL Coder GPU Coder Mass market low cost hardware Rapid prototyping, student competitions, entry boards Industrial strength devices High performance SoCs Optimized CUDA code for deep learning 19



19 Autonomous Systems Technologies - Summary Position Estimation SLAM Map representation Occupancy grid State estimation Mission Planning Decision making Path and motion planning Collision avoidance Path following Platform Localization Planning Sense Perception Connectivity Planning Perception Controls Control Connect Scene Understanding Sensor fusion Deep learning Object detection Object tracking Sensors Cameras RADAR LIDAR GPS Commands Motion Control Actuators Controls Feedback controls Mode logic Gain scheduling Trajectory tracking 20
20 Contact Us: Systematics Ltd. Tel: Asaf Moses Seminars: Courses: Webinars: Thank You!
Designing a Pick and Place Robotics Application Using MATLAB and Simulink
 Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Automated Driving Development
 Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems
Automated Driving Development with MATLAB and Simulink MANOHAR REDDY M 2015 The MathWorks, Inc. 1 Using Model-Based Design to develop high quality and reliable Active Safety & Automated Driving Systems
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
다중센서기반자율시스템의모델설계및개발 이제훈차장 The MathWorks, Inc. 2
 1 다중센서기반자율시스템의모델설계및개발 이제훈차장 2017 The MathWorks, Inc. 2 What we will see today 3 Functional Segmentation of Autonomous System Aircraft/ Platform Sense Perceive Plan & Decide Control Connect/ Communicate
1 다중센서기반자율시스템의모델설계및개발 이제훈차장 2017 The MathWorks, Inc. 2 What we will see today 3 Functional Segmentation of Autonomous System Aircraft/ Platform Sense Perceive Plan & Decide Control Connect/ Communicate
What's new in MATLAB and Simulink for Model-Based Design
 What's new in MATLAB and Simulink for Model-Based Design Magnus Jung Application Engineer 2016 The MathWorks, Inc. 1 What s New? 2 Model-Based Design Workflow RESEARCH REQUIREMENTS DESIGN Scheduling Event
What's new in MATLAB and Simulink for Model-Based Design Magnus Jung Application Engineer 2016 The MathWorks, Inc. 1 What s New? 2 Model-Based Design Workflow RESEARCH REQUIREMENTS DESIGN Scheduling Event
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
컴퓨터비전의최신기술 : Deep Learning, 3D Vision and Embedded Vision
 1 컴퓨터비전의최신기술 : Deep Learning, 3D Vision and Embedded Vision 김종남 Application Engineer 2017 The MathWorks, Inc. 2 Three Main Topics New capabilities for computer vision system design: Deep Learning 3-D Vision
1 컴퓨터비전의최신기술 : Deep Learning, 3D Vision and Embedded Vision 김종남 Application Engineer 2017 The MathWorks, Inc. 2 Three Main Topics New capabilities for computer vision system design: Deep Learning 3-D Vision
Automated Driving System Toolbox 소개
 1 Automated Driving System Toolbox 소개 이제훈차장 2017 The MathWorks, Inc. 2 Common Questions from Automated Driving Engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010 0101010100101010101001
1 Automated Driving System Toolbox 소개 이제훈차장 2017 The MathWorks, Inc. 2 Common Questions from Automated Driving Engineers 1011010101010100101001 0101010100100001010101 0010101001010100101010 0101010100101010101001
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
Introduction to Automated Driving System Toolbox: Design and Verify Perception Systems
 Introduction to Automated Driving System Toolbox: Design and Verify Perception Systems Mark Corless Industry Marketing Automated Driving Segment Manager 2017 The MathWorks, Inc. 1 Some common questions
Introduction to Automated Driving System Toolbox: Design and Verify Perception Systems Mark Corless Industry Marketing Automated Driving Segment Manager 2017 The MathWorks, Inc. 1 Some common questions
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Technical Paper of HITCSC Team for The International Aerial Robotics Competition
 Technical Paper of HITCSC Team for The International Aerial Robotics Competition Qingtao Yu, Yuanhong Li, Hang Yu, Haodi Yao, Rui Xing, Qi Zhao, Xiaowei Xing Harbin Institute of Tecnology ABSTRACT This
Technical Paper of HITCSC Team for The International Aerial Robotics Competition Qingtao Yu, Yuanhong Li, Hang Yu, Haodi Yao, Rui Xing, Qi Zhao, Xiaowei Xing Harbin Institute of Tecnology ABSTRACT This
Model-Based Design: Generating Embedded Code for Prototyping or Production
 Model-Based Design: Generating Embedded Code for Prototyping or Production Ruth-Anne Marchant Application Engineer MathWorks 2016 The MathWorks, Inc. 1 2 ABB Accelerates Application Control Software Development
Model-Based Design: Generating Embedded Code for Prototyping or Production Ruth-Anne Marchant Application Engineer MathWorks 2016 The MathWorks, Inc. 1 2 ABB Accelerates Application Control Software Development
Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems
 Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems Gernot Schraberger Industry Manager, Europe Industrial Automation & Machinery, Energy Production MathWorks 2012 The
Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems Gernot Schraberger Industry Manager, Europe Industrial Automation & Machinery, Energy Production MathWorks 2012 The
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
Hardware-Software Co-Design and Prototyping on SoC FPGAs Puneet Kumar Prateek Sikka Application Engineering Team
 Hardware-Software Co-Design and Prototyping on SoC FPGAs Puneet Kumar Prateek Sikka Application Engineering Team 2015 The MathWorks, Inc. 1 Agenda Integrated Hardware / Software Top down Workflow for SoC
Hardware-Software Co-Design and Prototyping on SoC FPGAs Puneet Kumar Prateek Sikka Application Engineering Team 2015 The MathWorks, Inc. 1 Agenda Integrated Hardware / Software Top down Workflow for SoC
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Hierarchical Multi-Objective Planning For Autonomous Vehicles
 Hierarchical Multi-Objective Planning For Autonomous Vehicles Alberto Speranzon United Technologies Research Center UTC Institute for Advanced Systems Engineering Seminar Series Acknowledgements and References
Hierarchical Multi-Objective Planning For Autonomous Vehicles Alberto Speranzon United Technologies Research Center UTC Institute for Advanced Systems Engineering Seminar Series Acknowledgements and References
Model-Based Design: Design with Simulation in Simulink
 Model-Based Design: Design with Simulation in Simulink Ruth-Anne Marchant Application Engineer MathWorks 2016 The MathWorks, Inc. 1 2 Outline Model-Based Design Overview Modelling and Design in Simulink
Model-Based Design: Design with Simulation in Simulink Ruth-Anne Marchant Application Engineer MathWorks 2016 The MathWorks, Inc. 1 2 Outline Model-Based Design Overview Modelling and Design in Simulink
Attack Resilient State Estimation for Vehicular Systems
 December 15 th 2013. T-SET Final Report Attack Resilient State Estimation for Vehicular Systems Nicola Bezzo (nicbezzo@seas.upenn.edu) Prof. Insup Lee (lee@cis.upenn.edu) PRECISE Center University of Pennsylvania
December 15 th 2013. T-SET Final Report Attack Resilient State Estimation for Vehicular Systems Nicola Bezzo (nicbezzo@seas.upenn.edu) Prof. Insup Lee (lee@cis.upenn.edu) PRECISE Center University of Pennsylvania
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Modelling and Simulation Made Easy with Simulink Tiffany Liang Application Engineer MathWorks
 Modelling and Simulation Made Easy with Simulink Tiffany Liang Application Engineer MathWorks 2015 The MathWorks, Inc. 1 What will you learn in this presentation? For those who are not familiar with Simulink
Modelling and Simulation Made Easy with Simulink Tiffany Liang Application Engineer MathWorks 2015 The MathWorks, Inc. 1 What will you learn in this presentation? For those who are not familiar with Simulink
Solid State LiDAR for Ubiquitous 3D Sensing
 April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
Autonomous navigation in industrial cluttered environments using embedded stereo-vision
 Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Robotics System Toolbox
 Developing Robotics Applications with MATLAB, Simulink: Introducing the Robotics System Toolbox 2016 MathWorks, Inc. 1 What Are You Doing with Robotics? Build Robots 2 Using MATLAB and Simulink for Building
Developing Robotics Applications with MATLAB, Simulink: Introducing the Robotics System Toolbox 2016 MathWorks, Inc. 1 What Are You Doing with Robotics? Build Robots 2 Using MATLAB and Simulink for Building
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms
 Philippe / 30 min dspace Technology Conference Plymouth, Michigan October 17th 2017 RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms Nicolas du Lac
Philippe / 30 min dspace Technology Conference Plymouth, Michigan October 17th 2017 RTMaps Embedded facilitating development and testing of complex HAD software on modern ADAS platforms Nicolas du Lac
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University. Course Logistics. Instructor: Jingjin Yu
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Course Logistics Instructor: Jingjin Yu Logistics, etc. General Lectures: Noon-1:20pm Tuesdays and Fridays, SEC 118 Instructor:
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Course Logistics Instructor: Jingjin Yu Logistics, etc. General Lectures: Noon-1:20pm Tuesdays and Fridays, SEC 118 Instructor:
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Jo-Car2 Autonomous Mode. Path Planning (Cost Matrix Algorithm)
") Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Codegenerierung für Embedded Systeme leicht gemacht So geht s!
 Codegenerierung für Embedded Systeme leicht gemacht So geht s! Tobias Kuschmider MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Agenda Model-Based Design An Introduction Use of Production Code
Codegenerierung für Embedded Systeme leicht gemacht So geht s! Tobias Kuschmider MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Agenda Model-Based Design An Introduction Use of Production Code
UCSD AUVSI Unmanned Aerial System Team. Joshua Egbert Shane Grant
 UCSD AUVSI Unmanned Aerial System Team Joshua Egbert Shane Grant Agenda Project background and history System design overview Gimbal Stabilization Target Recognition Lessons Learned Future Work Q&A UCSD
UCSD AUVSI Unmanned Aerial System Team Joshua Egbert Shane Grant Agenda Project background and history System design overview Gimbal Stabilization Target Recognition Lessons Learned Future Work Q&A UCSD
Small is the New Big: Data Analytics on the Edge
 Small is the New Big: Data Analytics on the Edge An overview of processors and algorithms for deep learning techniques on the edge Dr. Abhay Samant VP Engineering, Hiller Measurements Adjunct Faculty,
Small is the New Big: Data Analytics on the Edge An overview of processors and algorithms for deep learning techniques on the edge Dr. Abhay Samant VP Engineering, Hiller Measurements Adjunct Faculty,
Distributed Vision Processing in Smart Camera Networks
 Distributed Vision Processing in Smart Camera Networks CVPR-07 Hamid Aghajan, Stanford University, USA François Berry, Univ. Blaise Pascal, France Horst Bischof, TU Graz, Austria Richard Kleihorst, NXP
Distributed Vision Processing in Smart Camera Networks CVPR-07 Hamid Aghajan, Stanford University, USA François Berry, Univ. Blaise Pascal, France Horst Bischof, TU Graz, Austria Richard Kleihorst, NXP
ME 597/747 Autonomous Mobile Robots. Mid Term Exam. Duration: 2 hour Total Marks: 100
 ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
Embarquez votre Intelligence Artificielle (IA) sur CPU, GPU et FPGA
 sur CPU, GPU et FPGA") Embarquez votre Intelligence Artificielle (IA) sur CPU, GPU et FPGA Pierre Nowodzienski Engineer pierre.nowodzienski@mathworks.fr 2018 The MathWorks, Inc. 1 From Data to Business value Make decisions Get
Embarquez votre Intelligence Artificielle (IA) sur CPU, GPU et FPGA Pierre Nowodzienski Engineer pierre.nowodzienski@mathworks.fr 2018 The MathWorks, Inc. 1 From Data to Business value Make decisions Get
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
What s New in MATLAB and Simulink
 What s New in MATLAB Simulink Fabrizio Sara 2015 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers scientists deploy algorithms
What s New in MATLAB Simulink Fabrizio Sara 2015 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers scientists deploy algorithms
Mobile Robots: An Introduction.
 Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
How Microcontrollers help GPUs in Autonomous Drive
 How Microcontrollers help GPUs in Autonomous Drive GTC 2017 Munich, 2017-10-12 Hans Adlkofer, VP Automotive System department Outline 1 Main Safety concepts 2 Sensor Fusion architecture and functionalities
How Microcontrollers help GPUs in Autonomous Drive GTC 2017 Munich, 2017-10-12 Hans Adlkofer, VP Automotive System department Outline 1 Main Safety concepts 2 Sensor Fusion architecture and functionalities
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains
 Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps
 SAN JOSE MAY 8-11, 2017 Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps Nicolas du Lac CEO, Intempora Brief introduction about Intempora Intempora Software editor
SAN JOSE MAY 8-11, 2017 Design your autonomous vehicle applications with NVIDIA DriveWorks components on RTMaps Nicolas du Lac CEO, Intempora Brief introduction about Intempora Intempora Software editor
개발과정에서의 MATLAB 과 C 의연동 ( 영상처리분야 )
") 개발과정에서의 MATLAB 과 C 의연동 ( 영상처리분야 ) Application Engineer Caleb Kim 2016 The MathWorks, Inc. 1 Algorithm Development with MATLAB for C/C++ Programmers Objectives Use MATLAB throughout algorithm development
개발과정에서의 MATLAB 과 C 의연동 ( 영상처리분야 ) Application Engineer Caleb Kim 2016 The MathWorks, Inc. 1 Algorithm Development with MATLAB for C/C++ Programmers Objectives Use MATLAB throughout algorithm development
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Applying AI to Mapping
 Applying AI to Mapping Dr. Ryan Wolcott Manager, Simultaneous Localization and Mapping (SLAM) 1 TRI: Who We Are Our mission is to improve the quality of human life through advances in artificial intelligence,
Applying AI to Mapping Dr. Ryan Wolcott Manager, Simultaneous Localization and Mapping (SLAM) 1 TRI: Who We Are Our mission is to improve the quality of human life through advances in artificial intelligence,
Simulink as Your Enterprise Simulation Platform
 Simulink as Your Enterprise Simulation Platform Stephan van Beek Manager, Applications Engineering Group 2015 The MathWorks, Inc. 1 Why simulation? 2 Hyperloop 3 TU Delft Wins Elon Musk Hyperloop Competition
Simulink as Your Enterprise Simulation Platform Stephan van Beek Manager, Applications Engineering Group 2015 The MathWorks, Inc. 1 Why simulation? 2 Hyperloop 3 TU Delft Wins Elon Musk Hyperloop Competition
Autonomous Driving Solutions
 Autonomous Driving Solutions Oct, 2017 DrivePX2 & DriveWorks Marcus Oh (moh@nvidia.com) Sr. Solution Architect, NVIDIA This work is licensed under a Creative Commons Attribution-Share Alike 4.0 (CC BY-SA
Autonomous Driving Solutions Oct, 2017 DrivePX2 & DriveWorks Marcus Oh (moh@nvidia.com) Sr. Solution Architect, NVIDIA This work is licensed under a Creative Commons Attribution-Share Alike 4.0 (CC BY-SA
System Requirements & Platform Availability by Product for R2016b
 & Platform Availability by Product for R2016b View general system requirements. Product Aerospace Blockset Requires Aerospace Control recommended Aerospace Antenna RF recommended Phased Array recommended
& Platform Availability by Product for R2016b View general system requirements. Product Aerospace Blockset Requires Aerospace Control recommended Aerospace Antenna RF recommended Phased Array recommended
Designing and Targeting Video Processing Subsystems for Hardware
 1 Designing and Targeting Video Processing Subsystems for Hardware 정승혁과장 Senior Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 Pixel-stream Frame-based Process : From Algorithm to Hardware
1 Designing and Targeting Video Processing Subsystems for Hardware 정승혁과장 Senior Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 Pixel-stream Frame-based Process : From Algorithm to Hardware
Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments. Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno
 Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno Motivation Aerial robotic operation in GPS-denied Degraded
Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno Motivation Aerial robotic operation in GPS-denied Degraded
1st International Round Table on Intelligent Control for Space Missions
 DLR.de Chart 1 Space Missions Model-Based Control vs. Intelligent Control Dr.-Ing. Johann Bals Institute of System Dynamics and Control DLR - German Aerospace Center Oberpfaffenhofen, Germany 1st International
DLR.de Chart 1 Space Missions Model-Based Control vs. Intelligent Control Dr.-Ing. Johann Bals Institute of System Dynamics and Control DLR - German Aerospace Center Oberpfaffenhofen, Germany 1st International
Korea Autonomous Vehicle Contest 2013
 Korea Autonomous Vehicle Contest 2013 Smart Mobility Team (RTOS Lab. & Dyros Lab.) Graduate School of Convergence Science and Technology Seoul National University Page 1 Contents 1. Contest Information
Korea Autonomous Vehicle Contest 2013 Smart Mobility Team (RTOS Lab. & Dyros Lab.) Graduate School of Convergence Science and Technology Seoul National University Page 1 Contents 1. Contest Information
Integrated Workflow to Implement Embedded Software and FPGA Designs on the Xilinx Zynq Platform Puneet Kumar Senior Team Lead - SPC
 Integrated Workflow to Implement Embedded Software and FPGA Designs on the Xilinx Zynq Platform Puneet Kumar Senior Team Lead - SPC 2012 The MathWorks, Inc. 1 Agenda Integrated Hardware / Software Top
Integrated Workflow to Implement Embedded Software and FPGA Designs on the Xilinx Zynq Platform Puneet Kumar Senior Team Lead - SPC 2012 The MathWorks, Inc. 1 Agenda Integrated Hardware / Software Top
High-Level and Model-Based Design Targeting FPGAs and SoCs
 CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT High-Level and Model-Based Design Targeting FPGAs and SoCs Sander Ter Burg, FPGA System Engineer 3T B.V. What we do: Electronic and Embedded Systems Co-Development
CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT High-Level and Model-Based Design Targeting FPGAs and SoCs Sander Ter Burg, FPGA System Engineer 3T B.V. What we do: Electronic and Embedded Systems Co-Development
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots
 A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
CONTENT ENGINEERING & VISION LABORATORY. Régis Vinciguerra
 CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
Neuro-adaptive Formation Maintenance and Control of Nonholonomic Mobile Robots
 Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 50 Neuro-adaptive Formation Maintenance and Control of Nonholonomic
Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 50 Neuro-adaptive Formation Maintenance and Control of Nonholonomic
RECURRENT NEURAL NETWORKS
 RECURRENT NEURAL NETWORKS Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian
RECURRENT NEURAL NETWORKS Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Implementing MATLAB Algorithms in FPGAs and ASICs By Alexander Schreiber Senior Application Engineer MathWorks
 Implementing MATLAB Algorithms in FPGAs and ASICs By Alexander Schreiber Senior Application Engineer MathWorks 2014 The MathWorks, Inc. 1 Traditional Implementation Workflow: Challenges Algorithm Development
Implementing MATLAB Algorithms in FPGAs and ASICs By Alexander Schreiber Senior Application Engineer MathWorks 2014 The MathWorks, Inc. 1 Traditional Implementation Workflow: Challenges Algorithm Development
Introduction to Autonomous Mobile Robots
 Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
From Personal Computers to Personal Robots
 From Personal Computers to Personal Robots Challenges in Computer Science Education Nikolaus Correll Department of Computer Science University of Colorado at Boulder Mechanism vs. Computer Unimate (1961)
From Personal Computers to Personal Robots Challenges in Computer Science Education Nikolaus Correll Department of Computer Science University of Colorado at Boulder Mechanism vs. Computer Unimate (1961)
MATLAB/Simulink in der Mechatronik So einfach geht s!
 MATLAB/Simulink in der Mechatronik So einfach geht s! Executable s with Simulation Models Continuous Test and Verification Automatic Generation Tobias Kuschmider Applikationsingenieur 2014 The MathWorks,
MATLAB/Simulink in der Mechatronik So einfach geht s! Executable s with Simulation Models Continuous Test and Verification Automatic Generation Tobias Kuschmider Applikationsingenieur 2014 The MathWorks,
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE. Dennis Lui August 2017
 DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
Hardware and Software Co-Design for Motor Control Applications
 Hardware and Software Co-Design for Motor Control Applications Jonas Rutström Application Engineering 2015 The MathWorks, Inc. 1 Masterclass vs. Presentation? 2 What s a SoC? 3 What s a SoC? When we refer
Hardware and Software Co-Design for Motor Control Applications Jonas Rutström Application Engineering 2015 The MathWorks, Inc. 1 Masterclass vs. Presentation? 2 What s a SoC? 3 What s a SoC? When we refer
efpga for Neural Network based Image Recognition
 efpga for Neural Network based Image Recognition June 26, 2018 Yoan Dupret Managing Director Menta yoan.dupret@menta-efpga.com Copyright @ 2018 Menta S.A.S. Menta Overview 17 employees 11 years of R&D
efpga for Neural Network based Image Recognition June 26, 2018 Yoan Dupret Managing Director Menta yoan.dupret@menta-efpga.com Copyright @ 2018 Menta S.A.S. Menta Overview 17 employees 11 years of R&D
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Workflow for Control System Design and Implementation
 Workflow for Control System Design and Implementation - Dhirendra Singh, Application Engineer - Shobhit Shanker, Application Engineer 2012 The MathWorks, Inc. 1 Agenda Industry Trends and Challenges Design
Workflow for Control System Design and Implementation - Dhirendra Singh, Application Engineer - Shobhit Shanker, Application Engineer 2012 The MathWorks, Inc. 1 Agenda Industry Trends and Challenges Design
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 웨어러블디바이스의신호분석 Senior Application Engineer 김종남 2015 The MathWorks, Inc. 2 Agenda Internet Of Things Signal Analytics and Classification : On data from wareable and mobile device
2015 The MathWorks, Inc. 1 웨어러블디바이스의신호분석 Senior Application Engineer 김종남 2015 The MathWorks, Inc. 2 Agenda Internet Of Things Signal Analytics and Classification : On data from wareable and mobile device
Robotics. Haslum COMP3620/6320
 Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Pervasive Computing. OpenLab Jan 14 04pm L Institute of Networked and Embedded Systems
 Pervasive Computing Institute of Networked and Embedded Systems OpenLab 2010 Jan 14 04pm L4.1.01 MISSION STATEMENT Founded in 2007, the Pervasive Computing Group at Klagenfurt University is part of the
Pervasive Computing Institute of Networked and Embedded Systems OpenLab 2010 Jan 14 04pm L4.1.01 MISSION STATEMENT Founded in 2007, the Pervasive Computing Group at Klagenfurt University is part of the
What s New in MATLAB and Simulink The MathWorks, Inc. 1
 What s New in MATLAB Simulink 2015 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers scientists deploy algorithms applications
What s New in MATLAB Simulink 2015 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers scientists deploy algorithms applications
Layer-based Multi-sensor Fusion Architecture for Cooperative and Automated Driving Application Development
 Layer-based Multi-sensor Fusion Architecture for Cooperative and Automated Driving Application Development TNO, integrated vehicle safety (IVS), the Netherlands dr.ir. dr.ir. Tjerk Bijlsma ir. Frank Ophelders
Layer-based Multi-sensor Fusion Architecture for Cooperative and Automated Driving Application Development TNO, integrated vehicle safety (IVS), the Netherlands dr.ir. dr.ir. Tjerk Bijlsma ir. Frank Ophelders
Realtime Object Detection and Segmentation for HD Mapping
 Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Realtime Object Detection and Segmentation for HD Mapping William Raveane Lead AI Engineer Bahram Yoosefizonooz Technical Director NavInfo Europe Advanced Research Lab Presented at GTC Europe 2018 AI in
Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011
 Ryan Hamor CPRE 583 September 2011") Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011 Introduction The goal of this survey paper is to examine the field of robotic mapping and the use of FPGAs in various implementations.
Mini Survey Paper (Robotic Mapping) Ryan Hamor CPRE 583 September 2011 Introduction The goal of this survey paper is to examine the field of robotic mapping and the use of FPGAs in various implementations.
CSE 490R P3 - Model Learning and MPPI Due date: Sunday, Feb 28-11:59 PM
 CSE 490R P3 - Model Learning and MPPI Due date: Sunday, Feb 28-11:59 PM 1 Introduction In this homework, we revisit the concept of local control for robot navigation, as well as integrate our local controller
CSE 490R P3 - Model Learning and MPPI Due date: Sunday, Feb 28-11:59 PM 1 Introduction In this homework, we revisit the concept of local control for robot navigation, as well as integrate our local controller
Training models for road scene understanding with automated ground truth Dan Levi
 Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Training models for road scene understanding with automated ground truth Dan Levi With: Noa Garnett, Ethan Fetaya, Shai Silberstein, Rafi Cohen, Shaul Oron, Uri Verner, Ariel Ayash, Kobi Horn, Vlad Golder,
Designing GPU-accelerated applications with RTMaps (Real-Time Multisensor Applications) Framework and NVIDIA DriveWorks
 Framework and NVIDIA DriveWorks") MUNICH OCT 10-12, 2017 Designing GPU-accelerated applications with RTMaps (Real-Time Multisensor Applications) Framework and NVIDIA DriveWorks Xavier Rouah Lead Software Engineer Brief introduction about
MUNICH OCT 10-12, 2017 Designing GPU-accelerated applications with RTMaps (Real-Time Multisensor Applications) Framework and NVIDIA DriveWorks Xavier Rouah Lead Software Engineer Brief introduction about
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
What s New in Simulink in R2015b and R2016a
 What s New in Simulink in R2015b and R2016a Ruth-Anne Marchant Application Engineer 2016 The MathWorks, Inc. 1 2 Summary of Major New Capabilities for Model-Based Design RESEARCH REQUIREMENTS DESIGN Modelling
What s New in Simulink in R2015b and R2016a Ruth-Anne Marchant Application Engineer 2016 The MathWorks, Inc. 1 2 Summary of Major New Capabilities for Model-Based Design RESEARCH REQUIREMENTS DESIGN Modelling
Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration
 Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent
Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent
Extending Model-Based Design for HW/SW Design and Verification in MPSoCs Jim Tung MathWorks Fellow
 Extending Model-Based Design for HW/SW Design and Verification in MPSoCs Jim Tung MathWorks Fellow jim@mathworks.com 2014 The MathWorks, Inc. 1 Model-Based Design: From Concept to Production RESEARCH DESIGN
Extending Model-Based Design for HW/SW Design and Verification in MPSoCs Jim Tung MathWorks Fellow jim@mathworks.com 2014 The MathWorks, Inc. 1 Model-Based Design: From Concept to Production RESEARCH DESIGN
Robotics. Lecture 7: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
[Sub Track 1-3] FPGA/ASIC 을타겟으로한알고리즘의효율적인생성방법및신기능소개
![[Sub Track 1-3] FPGA/ASIC 을타겟으로한알고리즘의효율적인생성방법및신기능소개](/thumbs/82/85868302.jpg "[Sub Track 1-3] FPGA/ASIC 을타겟으로한알고리즘의효율적인생성방법및신기능소개") [Sub Track 1-3] FPGA/ASIC 을타겟으로한알고리즘의효율적인생성방법및신기능소개 정승혁과장 Senior Application Engineer MathWorks Korea 2015 The MathWorks, Inc. 1 Outline When FPGA, ASIC, or System-on-Chip (SoC) hardware is needed Hardware
[Sub Track 1-3] FPGA/ASIC 을타겟으로한알고리즘의효율적인생성방법및신기능소개 정승혁과장 Senior Application Engineer MathWorks Korea 2015 The MathWorks, Inc. 1 Outline When FPGA, ASIC, or System-on-Chip (SoC) hardware is needed Hardware
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
A Lightweight Simulator for Autonomous Driving Motion Planning Development
 Research Showcase @ CMU Robotics Institute School of Computer Science 10-2015 A Lightweight Simulator for Autonomous Driving Motion Planning Development Tianyu Gu John M. Dolan Follow this and additional
Research Showcase @ CMU Robotics Institute School of Computer Science 10-2015 A Lightweight Simulator for Autonomous Driving Motion Planning Development Tianyu Gu John M. Dolan Follow this and additional
InFuse: A Comprehensive Framework for Data Fusion in Space Robotics
 InFuse InFuse: A Comprehensive Framework for Data Fusion in Space Robotics June 20 th, 2017 Shashank Govindaraj (Space Applications Services, Belgium) Overview 1. Motivations & Objectives 2. InFuse within
InFuse InFuse: A Comprehensive Framework for Data Fusion in Space Robotics June 20 th, 2017 Shashank Govindaraj (Space Applications Services, Belgium) Overview 1. Motivations & Objectives 2. InFuse within
Case study: Vision and radar-based sensor fusion
 Automated Driving System Toolbox Case study: Vision and radar-based sensor fusion Seo-Wook Park Principal Application Engineer The MathWorks, Inc. 2017 The MathWorks, Inc. 1 Automated Driving System Toolbox
Automated Driving System Toolbox Case study: Vision and radar-based sensor fusion Seo-Wook Park Principal Application Engineer The MathWorks, Inc. 2017 The MathWorks, Inc. 1 Automated Driving System Toolbox
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous