Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
|
|
|
- Carmella Gibbs
- 5 years ago
- Views:
Transcription
1 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah
2 Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR

3 Descriptor Processing Chain Object/Non-object [...,...,...,...] Linear SVM Collect HOGs over detection window Contrast normalize over overlapping spatial cells Weighted vote in spatial & orientation cells Compute gradients Gamma compression 3 Image Window Slide courtesy : Navneet Dalal

4 Gamma correction Each pixel has a brightness value or luminance that varies from 0 to 1. Different cameras do not capture the correct values for luminance, and there is usually a non-linear mapping. 4 γ = 2.0 γ = 1.0 γ = 0.5 I out = I in γ



5 Gradient computation G x = G y = 0 1 Important: No smoothing with a Gaussian filter is used prior to the computation of gradients. θ = tan 1 I y I x magnitute = I x 2 + I y 2 Image I I x = G x I I y = G y I
6 Cells and Blocks in building the feature vector The feature vector for human detection is built using cells and blocks. Each cell is a matrix of 8x8 pixels. Every block is a matrix of 2x2 cells, but the blocks are accumulated by overlapping with blocks from previous locations. We consider an image patch of size 64 x128 for detecting humans. Cell: 8 x 8 pixels Block: 2x2 cells
7 Histogram of orientations in every cell Cell: 8 x 8 pixels Histogram with 9 bins for orientations varying from 0 to 180 degrees. We collect the magnitude and gradient angles for each pixel inside a cell to form the histogram with 9 bins (20 degree width for every bin for angles varying from 0 to 180 degrees). To avoid aliasing, votes are interpolated bilinearly from both sides based on the bin center.
8 Block Normalization Block: 2x2 cells Let v denote a 36 1 vector corresponding to a block aggregating the histograms from 4 cells. While using L2normalization we have the following: v v = v ε Total length of the feature vector for an image patch of size 64 x 128 = 7 x 15 x 36 = 3780 Overlapping blocks : 7 x 15 for image patch of size 64 x 128
9 Support vector machines for pedestrian detection min w ( w + C ζ i s. t. w T x j + b y j 1 ζ i We are given samples as follows x i, y i, where x i is a dimensional feature vector, and y i denotes the labels (+1 for positives, and -1 for negatives) For positives, we take image patches of dimensions 64x128 containing humans, and for negatives we take random image patches without any human in the images. We can use a linear SVM with C = 0.01.

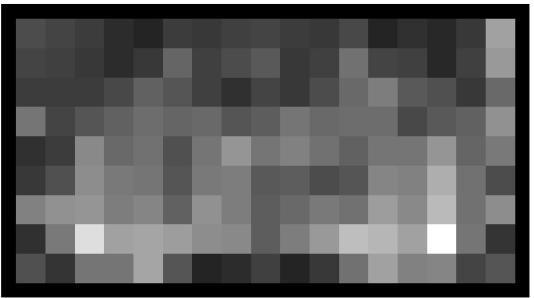
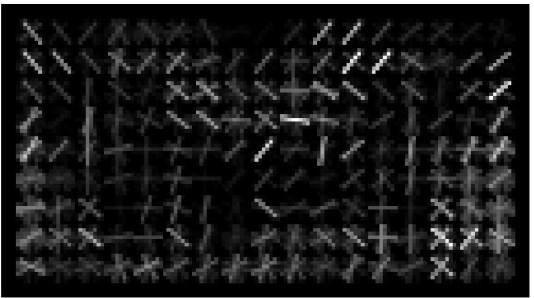
10 SVM weight coefficients average image from positive training samples maximum SVM positive coefficient maximum SVM negative coefficient test image Descriptor computed for the test image Descriptor weighted by positive SVM weights Descriptor weighted by negative SVM weights The most important cells are the ones that typically contain major human contours (especially the head and shoulders and the feet).
11 Threshold for Human detection For a given feature vector x j, we check if w T x j + b > T T=0 is the natural threshold for SVM, but we use a slightly higher threshold, say 0.4, to avoid false positives.
12 Multi-scale detection The feature vectors are always computed from image windows of dimensions 64 x 128, but we scale the image to detect humans who are closer and further from the camera. We move the detection window using some fixed strides, say stride = 1 cell, toward the right and down directions. We decrease the scale of the image from scale, say s =1.0, to a small value, say s =0.1 or so, where the entire image becomes smaller than 64 x 128. At a smaller scale, say s = 0.2, we are looking for humans who appear large in the original image as they are close to the camera.

13 Multi-scale detections Non-maxima suppression (NMS) one possibility is to use greedy NMS. We select the best scoring window and discard other windows that have a significant overlap with this one. We repeat this. After dense multi-scale scan of detection window Final detections
14 Overall Architecture Learning Phase Detection Phase Create normalised training data set Encode images into feature vectors Scan image at all scales and locations Run classifier to obtain object/non-object decisions 14 Learn binary classifier Object/Non-object decision Fuse multiple detections in 3-D position & scale space Object detections with bounding boxes Slide courtesy : Navneet Dalal







15 Descriptor Cues: Motorbikes Average gradients Weighted pos wts Weighted neg wts Input window Detection Examples Dominant pos orientations Dominant neg orientations Slide courtesy : Navneet Dalal
16 Key Descriptor Parameters Class Window Size Avg. Size # of Orientation Bins Orientation Range Gamma Compression Normalisation Method Person Height RGB L2-Hys Car Height RGB L1-Sqrt Bus Height RGB L1-Sqrt Motorbike Width RGB L1-Sqrt Bicycle Width RGB L2-Hys Cow Width RGB L2-Hys Sheep Height RGB L2-Hys Horse Width RGB L1-Sqrt Cat Height RGB L1-Sqrt Dog Height RGB L1-Sqrt Slide courtesy : Navneet Dalal
Histograms of Oriented Gradients for Human Detection p. 1/1
 Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Histogram of Oriented Gradients for Human Detection
 Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Histogram of Oriented Gradients (HOG) for Object Detection
 for Object Detection") Histogram of Oriented Gradients (HOG) for Object Detection Navneet DALAL Joint work with Bill TRIGGS and Cordelia SCHMID Goal & Challenges Goal: Detect and localise people in images and videos n Wide variety
Histogram of Oriented Gradients (HOG) for Object Detection Navneet DALAL Joint work with Bill TRIGGS and Cordelia SCHMID Goal & Challenges Goal: Detect and localise people in images and videos n Wide variety
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Human detection based on Sliding Window Approach
 Human detection based on Sliding Window Approach Heidelberg University Institute of Computer Engeneering Seminar: Mobile Human Detection Systems Name: Njieutcheu Tassi Cedrique Rovile Matr.Nr: 3348513
Human detection based on Sliding Window Approach Heidelberg University Institute of Computer Engeneering Seminar: Mobile Human Detection Systems Name: Njieutcheu Tassi Cedrique Rovile Matr.Nr: 3348513
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
An Implementation on Histogram of Oriented Gradients for Human Detection
 An Implementation on Histogram of Oriented Gradients for Human Detection Cansın Yıldız Dept. of Computer Engineering Bilkent University Ankara,Turkey cansin@cs.bilkent.edu.tr Abstract I implemented a Histogram
An Implementation on Histogram of Oriented Gradients for Human Detection Cansın Yıldız Dept. of Computer Engineering Bilkent University Ankara,Turkey cansin@cs.bilkent.edu.tr Abstract I implemented a Histogram
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Person Detection in Images using HoG + Gentleboost. Rahul Rajan June 1st July 15th CMU Q Robotics Lab
 Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Computer Science Faculty, Bandar Lampung University, Bandar Lampung, Indonesia
 Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
Application Object Detection Using Histogram of Oriented Gradient For Artificial Intelegence System Module of Nao Robot (Control System Laboratory (LSKK) Bandung Institute of Technology) A K Saputra 1.,
CS 231A Computer Vision (Winter 2018) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
HIGH PERFORMANCE PEDESTRIAN DETECTION ON TEGRA X1
 April 4-7, 2016 Silicon Valley HIGH PERFORMANCE PEDESTRIAN DETECTION ON TEGRA X1 Max Lv, NVIDIA Brant Zhao, NVIDIA April 7 mlv@nvidia.com https://github.com/madeye Histogram of Oriented Gradients on GPU
April 4-7, 2016 Silicon Valley HIGH PERFORMANCE PEDESTRIAN DETECTION ON TEGRA X1 Max Lv, NVIDIA Brant Zhao, NVIDIA April 7 mlv@nvidia.com https://github.com/madeye Histogram of Oriented Gradients on GPU
MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION
 MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION Panca Mudjirahardjo, Rahmadwati, Nanang Sulistiyanto and R. Arief Setyawan Department of Electrical Engineering, Faculty of
MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION Panca Mudjirahardjo, Rahmadwati, Nanang Sulistiyanto and R. Arief Setyawan Department of Electrical Engineering, Faculty of
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Histograms of Sparse Codes for Object Detection
 Histograms of Sparse Codes for Object Detection Xiaofeng Ren (Amazon), Deva Ramanan (UC Irvine) Presented by Hossein Azizpour What does the paper do? (learning) a new representation local histograms of
Histograms of Sparse Codes for Object Detection Xiaofeng Ren (Amazon), Deva Ramanan (UC Irvine) Presented by Hossein Azizpour What does the paper do? (learning) a new representation local histograms of
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Histograms of Oriented Gradients
 Histograms of Oriented Gradients Carlo Tomasi September 18, 2017 A useful question to ask of an image is whether it contains one or more instances of a certain object: a person, a face, a car, and so forth.
Histograms of Oriented Gradients Carlo Tomasi September 18, 2017 A useful question to ask of an image is whether it contains one or more instances of a certain object: a person, a face, a car, and so forth.
Object Detection with Discriminatively Trained Part Based Models
 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Car Detecting Method using high Resolution images
 Car Detecting Method using high Resolution images Swapnil R. Dhawad Department of Electronics and Telecommunication Engineering JSPM s Rajarshi Shahu College of Engineering, Savitribai Phule Pune University,
Car Detecting Method using high Resolution images Swapnil R. Dhawad Department of Electronics and Telecommunication Engineering JSPM s Rajarshi Shahu College of Engineering, Savitribai Phule Pune University,
Selective Search for Object Recognition
 Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Pedestrian Detection and Tracking in Images and Videos
 Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Object Detection. Computer Vision Yuliang Zou, Virginia Tech. Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick
 Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 People Detection Some material for these slides comes from www.cs.cornell.edu/courses/cs4670/2012fa/lectures/lec32_object_recognition.ppt
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 People Detection Some material for these slides comes from www.cs.cornell.edu/courses/cs4670/2012fa/lectures/lec32_object_recognition.ppt
Templates and Background Subtraction. Prof. D. Stricker Doz. G. Bleser
 Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
Templates and Background Subtraction Prof. D. Stricker Doz. G. Bleser 1 Surveillance Video: Example of multiple people tracking http://www.youtube.com/watch?v=inqv34bchem&feature=player_embedded As for
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO
 FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO Makoto Arie, Masatoshi Shibata, Kenji Terabayashi, Alessandro Moro and Kazunori Umeda Course
FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO Makoto Arie, Masatoshi Shibata, Kenji Terabayashi, Alessandro Moro and Kazunori Umeda Course
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
A HOG-based Real-time and Multi-scale Pedestrian Detector Demonstration System on FPGA
 Institute of Microelectronic Systems A HOG-based Real-time and Multi-scale Pedestrian Detector Demonstration System on FPGA J. Dürre, D. Paradzik and H. Blume FPGA 2018 Outline Pedestrian detection with
Institute of Microelectronic Systems A HOG-based Real-time and Multi-scale Pedestrian Detector Demonstration System on FPGA J. Dürre, D. Paradzik and H. Blume FPGA 2018 Outline Pedestrian detection with
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Fast Human Detection With Cascaded Ensembles On The GPU
 Fast Human Detection With Cascaded Ensembles On The GPU The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher
Fast Human Detection With Cascaded Ensembles On The GPU The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher
Learning Representations for Visual Object Class Recognition
 Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Seminar Heidelberg University
 Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Seminar Heidelberg University Mobile Human Detection Systems Pedestrian Detection by Stereo Vision on Mobile Robots Philip Mayer Matrikelnummer: 3300646 Motivation Fig.1: Pedestrians Within Bounding Box
Real-time Accurate Object Detection using Multiple Resolutions
 Real-time Accurate Object Detection using Multiple Resolutions Wei Zhang Gregory Zelinsky Dimitris Samaras Department of Computer Science Department of Psychology Stony Brook University, US {wzhang, samaras}@cs.sunysb.edu
Real-time Accurate Object Detection using Multiple Resolutions Wei Zhang Gregory Zelinsky Dimitris Samaras Department of Computer Science Department of Psychology Stony Brook University, US {wzhang, samaras}@cs.sunysb.edu
An Exploration of the SIFT Operator. Module number: P00999 Supervisor: Prof. Philip H. S. Torr Course code: CM79
 An Exploration of the SIFT Operator Module number: P00999 Supervisor: Prof. Philip H. S. Torr Course code: CM79 Jonathan Rihan Student number: 04073838 September 1, 2005 Dissertation Plan: An Exploration
An Exploration of the SIFT Operator Module number: P00999 Supervisor: Prof. Philip H. S. Torr Course code: CM79 Jonathan Rihan Student number: 04073838 September 1, 2005 Dissertation Plan: An Exploration
Semantic Pooling for Image Categorization using Multiple Kernel Learning
 Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Deformable Part Models
 Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Deformable Part Models References: Felzenszwalb, Girshick, McAllester and Ramanan, Object Detec@on with Discrimina@vely Trained Part Based Models, PAMI 2010 Code available at hkp://www.cs.berkeley.edu/~rbg/latent/
Problem Set 4. Danfei Xu CS 231A March 9th, (Courtesy of last year s slides)
") Problem Set 4 Danfei Xu CS 231A March 9th, 2018 (Courtesy of last year s slides) Outline Part 1: Facial Detection via HoG Features + SVM Classifier Part 2: Image Segmentation with K-Means and Meanshift
Problem Set 4 Danfei Xu CS 231A March 9th, 2018 (Courtesy of last year s slides) Outline Part 1: Facial Detection via HoG Features + SVM Classifier Part 2: Image Segmentation with K-Means and Meanshift
Automatic License Plate Detection
 Automatic License Plate Detection CS771 Course Project Winter Semester 2015-16 Author: Anurag Sharma(12146) Anurendra Kumar(12147) K.V Sameer Raja(12332) Shreesh Ladha(12679) Supervisors: Prof Harish Karnick
Automatic License Plate Detection CS771 Course Project Winter Semester 2015-16 Author: Anurag Sharma(12146) Anurendra Kumar(12147) K.V Sameer Raja(12332) Shreesh Ladha(12679) Supervisors: Prof Harish Karnick
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
FPGA implementations of Histograms of Oriented Gradients in FPGA
 FPGA implementations of Histograms of Oriented Gradients in FPGA C. Bourrasset 1, L. Maggiani 2,3, C. Salvadori 2,3, J. Sérot 1, P. Pagano 2,3 and F. Berry 1 1 Institut Pascal- D.R.E.A.M - Aubière, France
FPGA implementations of Histograms of Oriented Gradients in FPGA C. Bourrasset 1, L. Maggiani 2,3, C. Salvadori 2,3, J. Sérot 1, P. Pagano 2,3 and F. Berry 1 1 Institut Pascal- D.R.E.A.M - Aubière, France
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE
 PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
HOG-based Pedestriant Detector Training
 HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
Texture. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors
 Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Ranking Figure-Ground Hypotheses for Object Segmentation
 Ranking Figure-Ground Hypotheses for Object Segmentation João Carreira, Fuxin Li, Cristian Sminchisescu Faculty of Mathematics and Natural Science, INS, University of Bonn http://sminchisescu.ins.uni-bonn.de/
Ranking Figure-Ground Hypotheses for Object Segmentation João Carreira, Fuxin Li, Cristian Sminchisescu Faculty of Mathematics and Natural Science, INS, University of Bonn http://sminchisescu.ins.uni-bonn.de/
Implementation of Optical Flow, Sliding Window and SVM for Vehicle Detection and Tracking
 Implementation of Optical Flow, Sliding Window and SVM for Vehicle Detection and Tracking Mohammad Baji, Dr. I. SantiPrabha 2 M. Tech scholar, Department of E.C.E,U.C.E.K,Jawaharlal Nehru Technological
Implementation of Optical Flow, Sliding Window and SVM for Vehicle Detection and Tracking Mohammad Baji, Dr. I. SantiPrabha 2 M. Tech scholar, Department of E.C.E,U.C.E.K,Jawaharlal Nehru Technological
Fast Human Detection with Cascaded Ensembles. Berkin Bilgiç
 Fast Human Detection with Cascaded Ensembles by Berkin Bilgiç Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the degree of Master
Fast Human Detection with Cascaded Ensembles by Berkin Bilgiç Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the degree of Master
Local Patch Descriptors
 Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
CS 221: Object Recognition and Tracking
 CS 221: Object Recognition and Tracking Sandeep Sripada(ssandeep), Venu Gopal Kasturi(venuk) & Gautam Kumar Parai(gkparai) 1 Introduction In this project, we implemented an object recognition and tracking
CS 221: Object Recognition and Tracking Sandeep Sripada(ssandeep), Venu Gopal Kasturi(venuk) & Gautam Kumar Parai(gkparai) 1 Introduction In this project, we implemented an object recognition and tracking
Automated Canvas Analysis for Painting Conservation. By Brendan Tobin
 Automated Canvas Analysis for Painting Conservation By Brendan Tobin 1. Motivation Distinctive variations in the spacings between threads in a painting's canvas can be used to show that two sections of
Automated Canvas Analysis for Painting Conservation By Brendan Tobin 1. Motivation Distinctive variations in the spacings between threads in a painting's canvas can be used to show that two sections of
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Design Specication. Group 3
 Design Specication Group 3 September 20, 2012 Project Identity Group 3, 2012/HT, "The Robot Dog" Linköping University, ISY Name Responsibility Phone number E-mail Martin Danelljan Design 072-372 6364 marda097@student.liu.se
Design Specication Group 3 September 20, 2012 Project Identity Group 3, 2012/HT, "The Robot Dog" Linköping University, ISY Name Responsibility Phone number E-mail Martin Danelljan Design 072-372 6364 marda097@student.liu.se
Sketchable Histograms of Oriented Gradients for Object Detection
 Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
C. Premsai 1, Prof. A. Kavya 2 School of Computer Science, School of Computer Science Engineering, Engineering VIT Chennai, VIT Chennai
 Traffic Sign Detection Via Graph-Based Ranking and Segmentation Algorithm C. Premsai 1, Prof. A. Kavya 2 School of Computer Science, School of Computer Science Engineering, Engineering VIT Chennai, VIT
Traffic Sign Detection Via Graph-Based Ranking and Segmentation Algorithm C. Premsai 1, Prof. A. Kavya 2 School of Computer Science, School of Computer Science Engineering, Engineering VIT Chennai, VIT
fasthog - a real-time GPU implementation of HOG
 fasthog - a real-time GPU implementation of HOG Technical Report No. 2310/09 Victor Adrian Prisacariu University of Oxford, Department of Engineering Science Parks Road, Oxford, UK victor@robots.ox.ac.uk
fasthog - a real-time GPU implementation of HOG Technical Report No. 2310/09 Victor Adrian Prisacariu University of Oxford, Department of Engineering Science Parks Road, Oxford, UK victor@robots.ox.ac.uk
Object Category Detection: Sliding Windows
 03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b
 5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
VEHICLE LICENSE PLATE DETECTION AND RECOGNITION. A Thesis presented to the Faculty of the Graduate School at the University of Missouri
 VEHICLE LICENSE PLATE DETECTION AND RECOGNITION A Thesis presented to the Faculty of the Graduate School at the University of Missouri In Partial Fulfillment of the Requirements for the Degree Master of
VEHICLE LICENSE PLATE DETECTION AND RECOGNITION A Thesis presented to the Faculty of the Graduate School at the University of Missouri In Partial Fulfillment of the Requirements for the Degree Master of
detectorpls version William Robson Schwartz
 detectorpls version 0.1.1 William Robson Schwartz http://www.umiacs.umd.edu/~schwartz October 30, 2009 Contents 1 Introduction 2 2 Performing Object Detection 4 2.1 Conguration File........................
detectorpls version 0.1.1 William Robson Schwartz http://www.umiacs.umd.edu/~schwartz October 30, 2009 Contents 1 Introduction 2 2 Performing Object Detection 4 2.1 Conguration File........................
Bus Detection and recognition for visually impaired people
 Bus Detection and recognition for visually impaired people Hangrong Pan, Chucai Yi, and Yingli Tian The City College of New York The Graduate Center The City University of New York MAP4VIP Outline Motivation
Bus Detection and recognition for visually impaired people Hangrong Pan, Chucai Yi, and Yingli Tian The City College of New York The Graduate Center The City University of New York MAP4VIP Outline Motivation
Traffic Signs Recognition using HP and HOG Descriptors Combined to MLP and SVM Classifiers
 Traffic Signs Recognition using HP and HOG Descriptors Combined to MLP and SVM Classifiers A. Salhi, B. Minaoui, M. Fakir, H. Chakib, H. Grimech Faculty of science and Technology Sultan Moulay Slimane
Traffic Signs Recognition using HP and HOG Descriptors Combined to MLP and SVM Classifiers A. Salhi, B. Minaoui, M. Fakir, H. Chakib, H. Grimech Faculty of science and Technology Sultan Moulay Slimane
DPM Score Regressor for Detecting Occluded Humans from Depth Images
 DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
Histograms of Oriented Gradients for Human Detection
 Histograms of Oriented Gradients for Human Detection Navneet Dalal, Bill Triggs To cite this version: Navneet Dalal, Bill Triggs. Histograms of Oriented Gradients for Human Detection. Cordelia Schmid and
Histograms of Oriented Gradients for Human Detection Navneet Dalal, Bill Triggs To cite this version: Navneet Dalal, Bill Triggs. Histograms of Oriented Gradients for Human Detection. Cordelia Schmid and
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search
 Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Haar Wavelets and Edge Orientation Histograms for On Board Pedestrian Detection
 Haar Wavelets and Edge Orientation Histograms for On Board Pedestrian Detection David Gerónimo, Antonio López, Daniel Ponsa, and Angel D. Sappa Computer Vision Center, Universitat Autònoma de Barcelona
Haar Wavelets and Edge Orientation Histograms for On Board Pedestrian Detection David Gerónimo, Antonio López, Daniel Ponsa, and Angel D. Sappa Computer Vision Center, Universitat Autònoma de Barcelona
Filtering and Enhancing Images
 KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =