Today s Agenda. Geometry
|
|
|
- Karen Horton
- 5 years ago
- Views:
Transcription
1 Today s Agenda Geometry
2 Geometry Three basic elements Points Scalars Vectors Three type of spaces (Linear) vector space: scalars and vectors Affine space: vector space + points Euclidean space: vector space + distance
3 Euclidean Spaces Distance (scalar) + a vector space Operations Vector-vector addition Scalar-vector multiplication Scalar-scalar operations Inner (dot) products v v > 0 if v 0 Magnitude (length) of a vector v = Distance between two points P & Q v v P Q = (P Q) (P Q) Angle between two vectors v & u cos θ = u v u v
4 Line Segments If we use two points to define v, then P( α) = Q + αv = Q + α (R Q) = αr + (1 α)q For 0 α 1 we get all the points on the line segment joining R and Q E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012.
5 Affine Sums and Convex Hull Consider the sum P = α 1 P 1 + α 2 P α n P n Can show by induction that this sum makes sense iff α 1 + α α n = 1 in which case we have the affine sum of the points P 1,P 2,..P n If, in addition, α i >=0, we have the convex hull of P 1,P 2,..P n P 2 P 3 Smallest convex object containing P 1,P 2,..P n P 1 P E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley P 6 P 5 P 4
6 Planes A plane can be defined by three non-collinear points S α = αp + 1 α Q, 0 α 1 convex sum of P and Q convex sum of S(α) and R T β = βs + 1 β R 0 β 1 T α, β = β αα + 1 α Q + 1 β R 0 α, β 1 E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012.
7 Planes A plane can also be defined by a point and two vectors P u v R T(α, β) = P + β(1 α)(q P) + (1 β)(r P) T(α, β ) = P + α u + β v E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley Q Parametric form of planes
8 Triangles A triangle can be defined by three nonclinear points Triangle is convex so any point inside can be represented as an affine sum T(α, β) = ααp + β(1 α)q + (1 β)r Affine sum T(α, β, ) = ααp + β Q + R where 0 α, β, 1 α + β + = 1 E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012.
9 Barycentric Coordinates P T(a 1, a 2, a 3 )=a 1 P+a 2 Q+a 3 R where a 1 +a 2 +a 3 = 1 a i >=0 R T Q The representation is called the barycentric coordinate representation of P Where is T if a i <0? Where is T if a 1 +a 2 +a 3 1? T is outside of the triangle, but on the same plane formed by P, Q, and R T is not on the same plane PQR E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012.

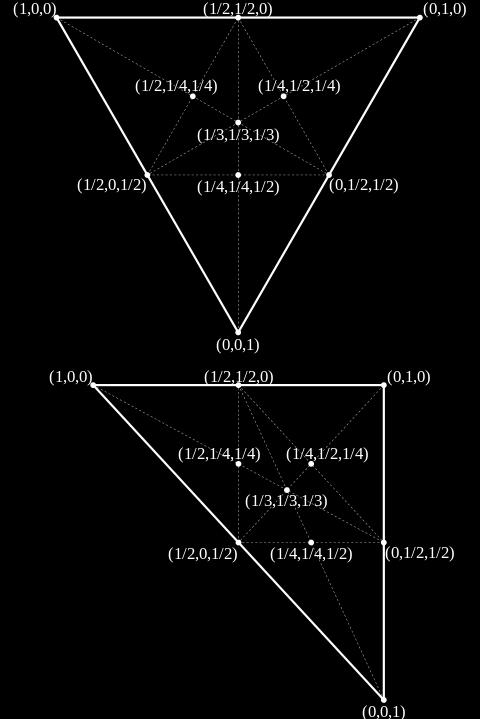
10 Barycentric Coordinates Equilateral triangle right triangle


11 Barycentric Coordinates Ray-triangle intersection: testing if a ray intersects with a triangle Rendering a triangle courses.cs.washington.edu
 n = 0 v P u E. Angel and D.")
12 Normals Every plane has a vector n normal (perpendicular) to it From point-two vector form T(α, β) = P + αu + βv, we know we can use the cross product to find n = u v and the equivalent form (T P) n = 0 v P u E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012.
13 3D Primitives So far, we have discussed how to represent 2D geometric objects, the primitives How about primitives in 3D? For existing graphics hardware and software, three features describe the 3D objects 2D surfaces vertices Flat, convex polygons, especially triangles
14 Reference Frame and Coordinate Systems Until now we have been able to work with geometric entities without using any frame of reference, i.e., in a coordinate-free system Coordinate system Reference frame E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
15 Coordinate Systems Consider a basis v 1, v 2,., v n of R n A vector in R n is written v = α 1 v 1 + α 2 v α n v n The list of scalars {α 1, α 2,. α n } is the representation of v with respect to the given basis We can write the representation as a row or column array of scalars α1 a = [α 1 α 2 α n] T = α2. α n E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
16 Example v=2v 1 +3v 2-4v 3 a = [2 3 4] T Note that this representation is with respect to a particular basis E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
17 Coordinate Systems Which is correct? v v Both, because coordinate system is defined in vector space and vectors have no fixed location E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
18 Frame of Reference Need a frame of reference to relate points and objects to our physical world. For example, where is a point? Can t answer without a reference system A coordinate system is insufficient to represent points Adding a reference point (origin) to a coordinate system Frame defined in affine space Frames used in graphics World frame Camera frame Image frame E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
19 Representation in a Frame Frame determined by (P 0, v 1, v 2, v 3 ) Within this frame, every vector can be written as v=α 1 v 1 + α 2 v 2 +.+α n v n Every point can be written as P = P 0 + β 1 v 1 + β 2 v 2 +.+β n v n e.g., a 3-tuples E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
20 Confusing Points and Vectors Consider the point and the vector P = P 0 + β 1 v 1 + β 2 v 2 +.+β n v n v=α 1 v 1 + α 2 v 2 +.+α n v n They appear to have the similar representations p=[β 1 β 2 β 3 ] v=[α 1 α 2 α 3 ] v p which confuses the point with the vector v Vector can be placed anywhere E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012 point: fixed
21 A Single Representation - Homogeneous Coordinates If we define 0 P = 0 and 1 P =P then we can write v=α 1 v 1 + α 2 v 2 +α 3 v 3 = [α 1 α 2 α 3 0 ] [v 1 v 2 v 3 P 0 ] T P = P 0 + β 1 v 1 + β 2 v 2 +β 3 v 3 = [β 1 β 2 β 3 1 ] [v 1 v 2 v 3 P 0 ] T Thus we obtain the four-dimensional homogeneous coordinate representation v = [α 1 α 2 α 3 0 ] T p = [β 1 β 2 β 3 1 ] T E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
22 Homogeneous Coordinates In general, the homogeneous coordinates for a 3D point [x y z] is given as P = xx yy zz w T = [ww ww ww w] T When w 0, we return to a 3D point by P = [x y z 1] where x x /w, y y /w, z z /w If w=0, the representation is that of a vector E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
23 Homogeneous Coordinates and Computer Graphics Homogeneous coordinates are key to all computer graphics systems All standard transformations (rotation, translation, scaling) can be implemented with matrix multiplications using 4 x 4 matrices Hardware pipeline works with 4 dimensional representations For orthographic viewing, we can maintain w=0 for vectors and w=1 for points For perspective, we need a perspective division E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
24 Change of Coordinate Systems Consider two representations of the same vector d with respect to two different bases. The representations are where a=[α 1 α 2 α 3 ] b=[β 1 β 2 β 3 ] d=α 1 v 1 + α 2 v 2 +α 3 v 3 = [v 1 v 2 v 3 ] [α 1 α 2 α 3 ] T =β 1 u 1 + β 2 u 2 +β 3 u 3 = [u 1 u 2 u 3 ] [β 1 β 2 β 3 ] T Let V=[v 1 v 2 v 3 ] and U=[u 1 u 2 u 3 ] d = Va = Ub
25 Representing second basis in terms of first Each of the basis vectors, u1,u2, u3, are vectors that can be represented in terms of the first basis u 1 = 11 v v v 3 u 2 = 21 v v v 3 u 3 = 31 v v v 3 d E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
26 Changing Representations The coefficients define a 3 x 3 matrix M and the bases can be related by We can change the representation from one coordinate system to the other as a=m T b = U=VM T and b=(m T ) -1 a
27 Change of Frames We can apply a similar process in homogeneous coordinates to the representations of both points and vectors Consider two frames: (P 0, v 1, v 2, v 3 ) (Q 0, u 1, u 2, u 3 ) P 0 v 1 v 3 Any point or vector can be represented in either frame We can represent Q 0, u 1, u 2, u 3 in terms of P 0, v 1, v 2, v 3 v 2 Q 0 E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012 u 1 u 2 u 3
28 Representing One Frame in Terms of the Other Extending what we did with change of bases u 1 = 11 v v v 3 u 2 = 21 v v v 3 u 3 = 31 v v v 3 Q 0 = 41 v v v 3 +P 0 defining a 4 x 4 matrix = M U Q 0 = V P 0 M T E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
29 Changing Representations Any point or vector has a representation in a frame a=[α 1 α 2 α 3 α 4 ] in the first frame b=[β 1 β 2 β 3 β 4 ] in the second frame where α 4 = β 4 = 1 for points and α 4 = β 4 = 0 for vectors We can change the representation from one frame to the other as a=m T b and b=(m T ) -1 a The matrix M is 4 x 4 and specifies an affine transformation in homogeneous coordinates E. Angel and D. Shriener: Interactive Computer Graphics 6E Addison-Wesley 2012
Geometry. CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science
 Geometry CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012. 1 Objectives Introduce
Geometry CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012. 1 Objectives Introduce
CS452/552; EE465/505. Geometry Transformations
 CS452/552; EE465/505 Geometry Transformations 1-26-15 Outline! Geometry: scalars, points & vectors! Transformations Read: Angel, Chapter 4 (study cube.html/cube.js example) Appendix B: Spaces (vector,
CS452/552; EE465/505 Geometry Transformations 1-26-15 Outline! Geometry: scalars, points & vectors! Transformations Read: Angel, Chapter 4 (study cube.html/cube.js example) Appendix B: Spaces (vector,
C O M P U T E R G R A P H I C S. Computer Graphics. Three-Dimensional Graphics I. Guoying Zhao 1 / 52
 Computer Graphics Three-Dimensional Graphics I Guoying Zhao 1 / 52 Geometry Guoying Zhao 2 / 52 Objectives Introduce the elements of geometry Scalars Vectors Points Develop mathematical operations among
Computer Graphics Three-Dimensional Graphics I Guoying Zhao 1 / 52 Geometry Guoying Zhao 2 / 52 Objectives Introduce the elements of geometry Scalars Vectors Points Develop mathematical operations among
Objectives. Geometry. Coordinate-Free Geometry. Basic Elements. Transformations to Change Coordinate Systems. Scalars
 Objecties Geometry CS Interactie Computer Graphics Prof. Daid E. Breen Department of Computer Science Introduce the elements of geometry - Scalars - Vectors - Points Deelop mathematical operations among
Objecties Geometry CS Interactie Computer Graphics Prof. Daid E. Breen Department of Computer Science Introduce the elements of geometry - Scalars - Vectors - Points Deelop mathematical operations among
Objectives. Geometry. Basic Elements. Coordinate-Free Geometry. Transformations to Change Coordinate Systems. Scalars
 Objecties Geometry CS 432 Interactie Computer Graphics Prof. Daid E. Breen Department of Computer Science Introduce the elements of geometry - Scalars - Vectors - Points Deelop mathematical operations
Objecties Geometry CS 432 Interactie Computer Graphics Prof. Daid E. Breen Department of Computer Science Introduce the elements of geometry - Scalars - Vectors - Points Deelop mathematical operations
Three Main Themes of Computer Graphics
 Three Main Themes of Computer Graphics Modeling How do we represent (or model) 3-D objects? How do we construct models for specific objects? Animation How do we represent the motion of objects? How do
Three Main Themes of Computer Graphics Modeling How do we represent (or model) 3-D objects? How do we construct models for specific objects? Animation How do we represent the motion of objects? How do
Computer Graphics. Coordinate Systems and Change of Frames. Based on slides by Dianna Xu, Bryn Mawr College
 Computer Graphics Coordinate Systems and Change of Frames Based on slides by Dianna Xu, Bryn Mawr College Linear Independence A set of vectors independent if is linearly If a set of vectors is linearly
Computer Graphics Coordinate Systems and Change of Frames Based on slides by Dianna Xu, Bryn Mawr College Linear Independence A set of vectors independent if is linearly If a set of vectors is linearly
Geometry. Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico
 Geometry Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico 1 Objectives Introduce the elements of geometry - Scalars - Vectors - Points
Geometry Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico 1 Objectives Introduce the elements of geometry - Scalars - Vectors - Points
Geometry. Prof. George Wolberg Dept. of Computer Science City College of New York
 Geometry Prof. George Wolberg Dept. of Computer Science City College of New York Objectives Introduce the elements of geometry -Scalars - Vectors - Points Develop mathematical operations among them in
Geometry Prof. George Wolberg Dept. of Computer Science City College of New York Objectives Introduce the elements of geometry -Scalars - Vectors - Points Develop mathematical operations among them in
Last week. Machiraju/Zhang/Möller
 Last week Machiraju/Zhang/Möller 1 Overview of a graphics system Output device Input devices Image formed and stored in frame buffer Machiraju/Zhang/Möller 2 Introduction to CG Torsten Möller 3 Ray tracing:
Last week Machiraju/Zhang/Möller 1 Overview of a graphics system Output device Input devices Image formed and stored in frame buffer Machiraju/Zhang/Möller 2 Introduction to CG Torsten Möller 3 Ray tracing:
Basic Elements. Geometry is the study of the relationships among objects in an n-dimensional space
 Basic Elements Geometry is the study of the relationships among objects in an n-dimensional space In computer graphics, we are interested in objects that exist in three dimensions We want a minimum set
Basic Elements Geometry is the study of the relationships among objects in an n-dimensional space In computer graphics, we are interested in objects that exist in three dimensions We want a minimum set
Transformations Computer Graphics I Lecture 4
 15-462 Computer Graphics I Lecture 4 Transformations Vector Spaces Affine and Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices January 23, 2003 [Angel, Ch. 4] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 4 Transformations Vector Spaces Affine and Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices January 23, 2003 [Angel, Ch. 4] Frank Pfenning Carnegie
Transformations Computer Graphics I Lecture 4
 15-462 Computer Graphics I Lecture 4 Transformations Vector Spaces Affine and Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices January 24, 2002 [Angel, Ch. 4] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 4 Transformations Vector Spaces Affine and Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices January 24, 2002 [Angel, Ch. 4] Frank Pfenning Carnegie
Lecture 9: Transformations. CITS3003 Graphics & Animation
 Lecture 9: Transformations CITS33 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 212 Objectives Introduce standard transformations Rotation Translation Scaling
Lecture 9: Transformations CITS33 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 212 Objectives Introduce standard transformations Rotation Translation Scaling
2D Object Definition (1/3)
") 2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
521493S Computer Graphics Exercise 2 Solution (Chapters 4-5)
") 5493S Computer Graphics Exercise Solution (Chapters 4-5). Given two nonparallel, three-dimensional vectors u and v, how can we form an orthogonal coordinate system in which u is one of the basis vectors?
5493S Computer Graphics Exercise Solution (Chapters 4-5). Given two nonparallel, three-dimensional vectors u and v, how can we form an orthogonal coordinate system in which u is one of the basis vectors?
Lecture 4: Transformations and Matrices. CSE Computer Graphics (Fall 2010)
") Lecture 4: Transformations and Matrices CSE 40166 Computer Graphics (Fall 2010) Overall Objective Define object in object frame Move object to world/scene frame Bring object into camera/eye frame Instancing!
Lecture 4: Transformations and Matrices CSE 40166 Computer Graphics (Fall 2010) Overall Objective Define object in object frame Move object to world/scene frame Bring object into camera/eye frame Instancing!
EECE 478. Learning Objectives. Learning Objectives. Linear Algebra and 3D Geometry. Linear algebra in 3D. Coordinate systems
 EECE 478 Linear Algebra and 3D Geometry Learning Objectives Linear algebra in 3D Define scalars, points, vectors, lines, planes Manipulate to test geometric properties Coordinate systems Use homogeneous
EECE 478 Linear Algebra and 3D Geometry Learning Objectives Linear algebra in 3D Define scalars, points, vectors, lines, planes Manipulate to test geometric properties Coordinate systems Use homogeneous
BASIC ELEMENTS. Geometry is the study of the relationships among objects in an n-dimensional space
 GEOMETRY 1 OBJECTIVES Introduce the elements of geometry Scalars Vectors Points Look at the mathematical operations among them Define basic primitives Line segments Polygons Look at some uses for these
GEOMETRY 1 OBJECTIVES Introduce the elements of geometry Scalars Vectors Points Look at the mathematical operations among them Define basic primitives Line segments Polygons Look at some uses for these
Transformations. CSCI 420 Computer Graphics Lecture 4
 CSCI 420 Computer Graphics Lecture 4 Transformations Jernej Barbic University of Southern California Vector Spaces Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices [Angel, Ch. 4]
CSCI 420 Computer Graphics Lecture 4 Transformations Jernej Barbic University of Southern California Vector Spaces Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices [Angel, Ch. 4]
Computer Graphics I Lecture 11
 15-462 Computer Graphics I Lecture 11 Midterm Review Assignment 3 Movie Midterm Review Midterm Preview February 26, 2002 Frank Pfenning Carnegie Mellon University http://www.cs.cmu.edu/~fp/courses/graphics/
15-462 Computer Graphics I Lecture 11 Midterm Review Assignment 3 Movie Midterm Review Midterm Preview February 26, 2002 Frank Pfenning Carnegie Mellon University http://www.cs.cmu.edu/~fp/courses/graphics/
CS 432 Interactive Computer Graphics
 CS 432 Interactive Computer Graphics Lecture 4 3D Viewing Matt Burlick - Drexel University - CS 432 1 Reading Angel Chapters 3-4 Red Book Chapter 5, Appendix E Matt Burlick - Drexel University - CS 432
CS 432 Interactive Computer Graphics Lecture 4 3D Viewing Matt Burlick - Drexel University - CS 432 1 Reading Angel Chapters 3-4 Red Book Chapter 5, Appendix E Matt Burlick - Drexel University - CS 432
Lecture 3: Convex sets
 Lecture 3: Convex sets Rajat Mittal IIT Kanpur We denote the set of real numbers as R. Most of the time we will be working with space R n and its elements will be called vectors. Remember that a subspace
Lecture 3: Convex sets Rajat Mittal IIT Kanpur We denote the set of real numbers as R. Most of the time we will be working with space R n and its elements will be called vectors. Remember that a subspace
Transformations. CSCI 420 Computer Graphics Lecture 5
 CSCI 420 Computer Graphics Lecture 5 Transformations Jernej Barbic University of Southern California Vector Spaces Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices [Angel, Ch. 3]
CSCI 420 Computer Graphics Lecture 5 Transformations Jernej Barbic University of Southern California Vector Spaces Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices [Angel, Ch. 3]
Transformations. OpenGL Transformations. 4x4 Model-view Matrix (this lecture) OpenGL Transformation Matrices. 4x4 Projection Matrix (next lecture)
 OpenGL Transformation Matrices. 4x4 Projection Matrix (next lecture)") CSCI 420 Computer Graphics Lecture 5 OpenGL Transformations Transformations Vector Spaces Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices Jernej Barbic [Angel, Ch. 3] University
CSCI 420 Computer Graphics Lecture 5 OpenGL Transformations Transformations Vector Spaces Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices Jernej Barbic [Angel, Ch. 3] University
CS452/552; EE465/505. Clipping & Scan Conversion
 CS452/552; EE465/505 Clipping & Scan Conversion 3-31 15 Outline! From Geometry to Pixels: Overview Clipping (continued) Scan conversion Read: Angel, Chapter 8, 8.1-8.9 Project#1 due: this week Lab4 due:
CS452/552; EE465/505 Clipping & Scan Conversion 3-31 15 Outline! From Geometry to Pixels: Overview Clipping (continued) Scan conversion Read: Angel, Chapter 8, 8.1-8.9 Project#1 due: this week Lab4 due:
DRAFT: Mathematical Background for Three-Dimensional Computer Graphics. Jonathan R. Senning Gordon College
 DRAFT: Mathematical Background for Three-Dimensional Computer Graphics Jonathan R. Senning Gordon College September 2006 ii Contents Introduction 2 Affine Geometry 3 2. Affine Space...................................
DRAFT: Mathematical Background for Three-Dimensional Computer Graphics Jonathan R. Senning Gordon College September 2006 ii Contents Introduction 2 Affine Geometry 3 2. Affine Space...................................
Geometry Reasons for Proofs Chapter 1
 Geometry Reasons for Proofs Chapter 1 Lesson 1.1 Defined Terms: Undefined Terms: Point: Line: Plane: Space: Postulate 1: Postulate : terms that are explained using undefined and/or other defined terms
Geometry Reasons for Proofs Chapter 1 Lesson 1.1 Defined Terms: Undefined Terms: Point: Line: Plane: Space: Postulate 1: Postulate : terms that are explained using undefined and/or other defined terms
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS
 GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
Supplement to Lecture 16
 Supplement to Lecture 16 Global Illumination: View Dependent CS 354 Computer Graphics http://www.cs.utexas.edu/~bajaj/ Notes and figures from Ed Angel: Interactive Computer Graphics, 6 th Ed., 2012 Addison
Supplement to Lecture 16 Global Illumination: View Dependent CS 354 Computer Graphics http://www.cs.utexas.edu/~bajaj/ Notes and figures from Ed Angel: Interactive Computer Graphics, 6 th Ed., 2012 Addison
Shadows in Computer Graphics
 Shadows in Computer Graphics Steven Janke November 2014 Steven Janke (Seminar) Shadows in Computer Graphics November 2014 1 / 49 Shadows (from Doom) Steven Janke (Seminar) Shadows in Computer Graphics
Shadows in Computer Graphics Steven Janke November 2014 Steven Janke (Seminar) Shadows in Computer Graphics November 2014 1 / 49 Shadows (from Doom) Steven Janke (Seminar) Shadows in Computer Graphics
Geometric transformations assign a point to a point, so it is a point valued function of points. Geometric transformation may destroy the equation
 Geometric transformations assign a point to a point, so it is a point valued function of points. Geometric transformation may destroy the equation and the type of an object. Even simple scaling turns a
Geometric transformations assign a point to a point, so it is a point valued function of points. Geometric transformation may destroy the equation and the type of an object. Even simple scaling turns a
For each question, indicate whether the statement is true or false by circling T or F, respectively.
 True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
Interactive Computer Graphics A TOP-DOWN APPROACH WITH SHADER-BASED OPENGL
 International Edition Interactive Computer Graphics A TOP-DOWN APPROACH WITH SHADER-BASED OPENGL Sixth Edition Edward Angel Dave Shreiner Interactive Computer Graphics: A Top-Down Approach with Shader-Based
International Edition Interactive Computer Graphics A TOP-DOWN APPROACH WITH SHADER-BASED OPENGL Sixth Edition Edward Angel Dave Shreiner Interactive Computer Graphics: A Top-Down Approach with Shader-Based
Orthogonal Projection Matrices. Angel and Shreiner: Interactive Computer Graphics 7E Addison-Wesley 2015
 Orthogonal Projection Matrices 1 Objectives Derive the projection matrices used for standard orthogonal projections Introduce oblique projections Introduce projection normalization 2 Normalization Rather
Orthogonal Projection Matrices 1 Objectives Derive the projection matrices used for standard orthogonal projections Introduce oblique projections Introduce projection normalization 2 Normalization Rather
The Importance of Matrices in the DirectX API. by adding support in the programming language for frequently used calculations.
 Hermann Chong Dr. King Linear Algebra Applications 28 November 2001 The Importance of Matrices in the DirectX API In the world of 3D gaming, there are two APIs (Application Program Interface) that reign
Hermann Chong Dr. King Linear Algebra Applications 28 November 2001 The Importance of Matrices in the DirectX API In the world of 3D gaming, there are two APIs (Application Program Interface) that reign
Computer Graphics 7: Viewing in 3-D
 Computer Graphics 7: Viewing in 3-D In today s lecture we are going to have a look at: Transformations in 3-D How do transformations in 3-D work? Contents 3-D homogeneous coordinates and matrix based transformations
Computer Graphics 7: Viewing in 3-D In today s lecture we are going to have a look at: Transformations in 3-D How do transformations in 3-D work? Contents 3-D homogeneous coordinates and matrix based transformations
Virtual Cameras & Their Matrices
 Virtual Cameras & Their Matrices J.Tumblin-Modified, highly edited SLIDES from: Ed Angel Professor Emeritus of Computer Science University of New Mexico 1 What is Projection? Any operation that reduces
Virtual Cameras & Their Matrices J.Tumblin-Modified, highly edited SLIDES from: Ed Angel Professor Emeritus of Computer Science University of New Mexico 1 What is Projection? Any operation that reduces
Transformations. Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico
 Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
521466S Machine Vision Exercise #1 Camera models
 52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
Assignment 2 : Projection and Homography
 TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
CS 130 Final. Fall 2015
 CS 130 Final Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is trying
CS 130 Final Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is trying
3D Viewing. CS 4620 Lecture Steve Marschner. Cornell CS4620 Spring 2018 Lecture 9
 3D Viewing CS 46 Lecture 9 Cornell CS46 Spring 18 Lecture 9 18 Steve Marschner 1 Viewing, backward and forward So far have used the backward approach to viewing start from pixel ask what part of scene
3D Viewing CS 46 Lecture 9 Cornell CS46 Spring 18 Lecture 9 18 Steve Marschner 1 Viewing, backward and forward So far have used the backward approach to viewing start from pixel ask what part of scene
CHAPTER 1 Graphics Systems and Models 3
 ?????? 1 CHAPTER 1 Graphics Systems and Models 3 1.1 Applications of Computer Graphics 4 1.1.1 Display of Information............. 4 1.1.2 Design.................... 5 1.1.3 Simulation and Animation...........
?????? 1 CHAPTER 1 Graphics Systems and Models 3 1.1 Applications of Computer Graphics 4 1.1.1 Display of Information............. 4 1.1.2 Design.................... 5 1.1.3 Simulation and Animation...........
3D Computer Vision II. Reminder Projective Geometry, Transformations
 3D Computer Vision II Reminder Projective Geometry, Transformations Nassir Navab" based on a course given at UNC by Marc Pollefeys & the book Multiple View Geometry by Hartley & Zisserman" October 21,
3D Computer Vision II Reminder Projective Geometry, Transformations Nassir Navab" based on a course given at UNC by Marc Pollefeys & the book Multiple View Geometry by Hartley & Zisserman" October 21,
Practical Linear Algebra: A Geometry Toolbox
 Practical Linear Algebra: A Geometry Toolbox Third edition Chapter 1: Affine Maps in 3D Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/pla
Practical Linear Algebra: A Geometry Toolbox Third edition Chapter 1: Affine Maps in 3D Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/pla
Specifying Complex Scenes
 Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
Transforms. COMP 575/770 Spring 2013
 Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
Topics. From vertices to fragments
 Topics From vertices to fragments From Vertices to Fragments Assign a color to every pixel Pass every object through the system Required tasks: Modeling Geometric processing Rasterization Fragment processing
Topics From vertices to fragments From Vertices to Fragments Assign a color to every pixel Pass every object through the system Required tasks: Modeling Geometric processing Rasterization Fragment processing
Computer Viewing. CITS3003 Graphics & Animation. E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley
 Computer Viewing CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 1 Objectives Introduce the mathematics of projection Introduce OpenGL viewing
Computer Viewing CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 1 Objectives Introduce the mathematics of projection Introduce OpenGL viewing
Jorg s Graphics Lecture Notes Coordinate Spaces 1
 Jorg s Graphics Lecture Notes Coordinate Spaces Coordinate Spaces Computer Graphics: Objects are rendered in the Euclidean Plane. However, the computational space is better viewed as one of Affine Space
Jorg s Graphics Lecture Notes Coordinate Spaces Coordinate Spaces Computer Graphics: Objects are rendered in the Euclidean Plane. However, the computational space is better viewed as one of Affine Space
GLOBAL EDITION. Interactive Computer Graphics. A Top-Down Approach with WebGL SEVENTH EDITION. Edward Angel Dave Shreiner
 GLOBAL EDITION Interactive Computer Graphics A Top-Down Approach with WebGL SEVENTH EDITION Edward Angel Dave Shreiner This page is intentionally left blank. Interactive Computer Graphics with WebGL, Global
GLOBAL EDITION Interactive Computer Graphics A Top-Down Approach with WebGL SEVENTH EDITION Edward Angel Dave Shreiner This page is intentionally left blank. Interactive Computer Graphics with WebGL, Global
CS 4620 Midterm 1. Tuesday 22 October minutes
 CS 4620 Midterm 1 Tuesday 22 October 2013 90 minutes Problem 1: Transformations (20 pts) Consider the affine transformation on R 3 defined in homogeneous coordinates by the matrix: 1 M = 1 0 0 2 0 1 0
CS 4620 Midterm 1 Tuesday 22 October 2013 90 minutes Problem 1: Transformations (20 pts) Consider the affine transformation on R 3 defined in homogeneous coordinates by the matrix: 1 M = 1 0 0 2 0 1 0
CS559 Computer Graphics Fall 2015
 CS559 Computer Graphics Fall 2015 Practice Midterm Exam Time: 2 hrs 1. [XX Y Y % = ZZ%] MULTIPLE CHOICE SECTION. Circle or underline the correct answer (or answers). You do not need to provide a justification
CS559 Computer Graphics Fall 2015 Practice Midterm Exam Time: 2 hrs 1. [XX Y Y % = ZZ%] MULTIPLE CHOICE SECTION. Circle or underline the correct answer (or answers). You do not need to provide a justification
Game Mathematics. (12 Week Lesson Plan)
") Game Mathematics (12 Week Lesson Plan) Lesson 1: Set Theory Textbook: Chapter One (pgs. 1 15) We begin the course by introducing the student to a new vocabulary and set of rules that will be foundational
Game Mathematics (12 Week Lesson Plan) Lesson 1: Set Theory Textbook: Chapter One (pgs. 1 15) We begin the course by introducing the student to a new vocabulary and set of rules that will be foundational
Geometric Queries for Ray Tracing
 CSCI 420 Computer Graphics Lecture 16 Geometric Queries for Ray Tracing Ray-Surface Intersection Barycentric Coordinates [Angel Ch. 11] Jernej Barbic University of Southern California 1 Ray-Surface Intersections
CSCI 420 Computer Graphics Lecture 16 Geometric Queries for Ray Tracing Ray-Surface Intersection Barycentric Coordinates [Angel Ch. 11] Jernej Barbic University of Southern California 1 Ray-Surface Intersections
Input and Interaction. Angel and Shreiner: Interactive Computer Graphics 7E Addison-Wesley 2015
 Input and Interaction 1 Objectives Introduce the basic input devices Physical Devices Logical Devices Input Modes Event-driven input Introduce double buffering for smooth animations Programming event input
Input and Interaction 1 Objectives Introduce the basic input devices Physical Devices Logical Devices Input Modes Event-driven input Introduce double buffering for smooth animations Programming event input
The Essentials of CAGD
 The Essentials of CAGD Chapter 1: The Bare Basics Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000 Farin & Hansford
The Essentials of CAGD Chapter 1: The Bare Basics Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000 Farin & Hansford
Blue colour text questions Black colour text sample answers Red colour text further explanation or references for the sample answers
 Blue colour text questions Black colour text sample answers Red colour text further explanation or references for the sample answers Question 1. a) (5 marks) Explain the OpenGL synthetic camera model,
Blue colour text questions Black colour text sample answers Red colour text further explanation or references for the sample answers Question 1. a) (5 marks) Explain the OpenGL synthetic camera model,
Advanced Computer Graphics Transformations. Matthias Teschner
 Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Intro to Curves Week 1, Lecture 2
 CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University Outline Math review Introduction to 2D curves
CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University Outline Math review Introduction to 2D curves
PetShop (BYU Students, SIGGRAPH 2006)
") Now Playing: PetShop (BYU Students, SIGGRAPH 2006) My Mathematical Mind Spoon From Gimme Fiction Released May 10, 2005 Geometric Objects in Computer Graphics Rick Skarbez, Instructor COMP 575 August 30,
Now Playing: PetShop (BYU Students, SIGGRAPH 2006) My Mathematical Mind Spoon From Gimme Fiction Released May 10, 2005 Geometric Objects in Computer Graphics Rick Skarbez, Instructor COMP 575 August 30,
1 Affine and Projective Coordinate Notation
 CS348a: Computer Graphics Handout #9 Geometric Modeling Original Handout #9 Stanford University Tuesday, 3 November 992 Original Lecture #2: 6 October 992 Topics: Coordinates and Transformations Scribe:
CS348a: Computer Graphics Handout #9 Geometric Modeling Original Handout #9 Stanford University Tuesday, 3 November 992 Original Lecture #2: 6 October 992 Topics: Coordinates and Transformations Scribe:
CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2
 CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 Outline Math review Introduction to 2D curves
CS 536 Computer Graphics Intro to Curves Week 1, Lecture 2 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University 1 Outline Math review Introduction to 2D curves
Input Nodes. Surface Input. Surface Input Nodal Motion Nodal Displacement Instance Generator Light Flocking
 Input Nodes Surface Input Nodal Motion Nodal Displacement Instance Generator Light Flocking The different Input nodes, where they can be found, what their outputs are. Surface Input When editing a surface,
Input Nodes Surface Input Nodal Motion Nodal Displacement Instance Generator Light Flocking The different Input nodes, where they can be found, what their outputs are. Surface Input When editing a surface,
3D Viewing. CS 4620 Lecture 8
 3D Viewing CS 46 Lecture 8 13 Steve Marschner 1 Viewing, backward and forward So far have used the backward approach to viewing start from pixel ask what part of scene projects to pixel explicitly construct
3D Viewing CS 46 Lecture 8 13 Steve Marschner 1 Viewing, backward and forward So far have used the backward approach to viewing start from pixel ask what part of scene projects to pixel explicitly construct
3-D D Euclidean Space - Vectors
 3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
Parallelograms. MA 341 Topics in Geometry Lecture 05
 Parallelograms MA 341 Topics in Geometry Lecture 05 Definitions A quadrilateral is a polygon with 4 distinct sides and four vertices. Is there a more precise definition? P 1 P 2 P 3 09-Sept-2011 MA 341
Parallelograms MA 341 Topics in Geometry Lecture 05 Definitions A quadrilateral is a polygon with 4 distinct sides and four vertices. Is there a more precise definition? P 1 P 2 P 3 09-Sept-2011 MA 341
Name Hr. Honors Geometry Lesson 9-1: Translate Figures and Use Vectors
 Name Hr Honors Geometry Lesson 9-1: Translate Figures and Use Vectors Learning Target: By the end of today s lesson we will be able to successfully use a vector to translate a figure. Isometry: An isometry
Name Hr Honors Geometry Lesson 9-1: Translate Figures and Use Vectors Learning Target: By the end of today s lesson we will be able to successfully use a vector to translate a figure. Isometry: An isometry
CS 4204 Computer Graphics
 CS 4204 Computer Graphics 3D Viewing and Projection Yong Cao Virginia Tech Objective We will develop methods to camera through scenes. We will develop mathematical tools to handle perspective projection.
CS 4204 Computer Graphics 3D Viewing and Projection Yong Cao Virginia Tech Objective We will develop methods to camera through scenes. We will develop mathematical tools to handle perspective projection.
QUESTION BANK 10CS65 : COMPUTER GRAPHICS AND VISUALIZATION
 QUESTION BANK 10CS65 : COMPUTER GRAPHICS AND VISUALIZATION INTRODUCTION OBJECTIVE: This chapter deals the applications of computer graphics and overview of graphics systems and imaging. UNIT I 1 With clear
QUESTION BANK 10CS65 : COMPUTER GRAPHICS AND VISUALIZATION INTRODUCTION OBJECTIVE: This chapter deals the applications of computer graphics and overview of graphics systems and imaging. UNIT I 1 With clear
CSE 167: Introduction to Computer Graphics Lecture #4: Coordinate Systems
 CSE 167: Introduction to Computer Graphics Lecture #4: Coordinate Systems Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2017 Announcements Friday: homework 1 due at 2pm Upload
CSE 167: Introduction to Computer Graphics Lecture #4: Coordinate Systems Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2017 Announcements Friday: homework 1 due at 2pm Upload
Chapter 5. Projections and Rendering
 Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
On the Midterm Exam. Monday, 10/17 in class. Closed book and closed notes. One-side and one page cheat sheet is allowed. A calculator is allowed
 On the Midterm Exam Monday, 1/17 in class Closed book and closed notes One-side and one page cheat sheet is allowed A calculator is allowed Covers the topics until the class on Wednesday, 1/12 Take-home
On the Midterm Exam Monday, 1/17 in class Closed book and closed notes One-side and one page cheat sheet is allowed A calculator is allowed Covers the topics until the class on Wednesday, 1/12 Take-home
GEOMETRY is the study of points in space
 CHAPTER 5 Logic and Geometry SECTION 5-1 Elements of Geometry GEOMETRY is the study of points in space POINT indicates a specific location and is represented by a dot and a letter R S T LINE is a set of
CHAPTER 5 Logic and Geometry SECTION 5-1 Elements of Geometry GEOMETRY is the study of points in space POINT indicates a specific location and is represented by a dot and a letter R S T LINE is a set of
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
3D Polygon Rendering. Many applications use rendering of 3D polygons with direct illumination
 Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Objectives: (What You ll Learn) Identify and model points, lines, planes Identify collinear and coplanar points, intersecting lines and planes
 Identify and model points, lines, planes Identify collinear and coplanar points, intersecting lines and planes") Geometry Chapter 1 Outline: Points, Lines, Planes, & Angles A. 1-1 Points, Lines, and Planes (What You ll Learn) Identify and model points, lines, planes Identify collinear and coplanar points, intersecting
Geometry Chapter 1 Outline: Points, Lines, Planes, & Angles A. 1-1 Points, Lines, and Planes (What You ll Learn) Identify and model points, lines, planes Identify collinear and coplanar points, intersecting
CS230 : Computer Graphics Lecture 4. Tamar Shinar Computer Science & Engineering UC Riverside
 CS230 : Computer Graphics Lecture 4 Tamar Shinar Computer Science & Engineering UC Riverside Shadows Shadows for each pixel do compute viewing ray if ( ray hits an object with t in [0, inf] ) then compute
CS230 : Computer Graphics Lecture 4 Tamar Shinar Computer Science & Engineering UC Riverside Shadows Shadows for each pixel do compute viewing ray if ( ray hits an object with t in [0, inf] ) then compute
Transformations: 2D Transforms
 1. Translation Transformations: 2D Transforms Relocation of point WRT frame Given P = (x, y), translation T (dx, dy) Then P (x, y ) = T (dx, dy) P, where x = x + dx, y = y + dy Using matrix representation
1. Translation Transformations: 2D Transforms Relocation of point WRT frame Given P = (x, y), translation T (dx, dy) Then P (x, y ) = T (dx, dy) P, where x = x + dx, y = y + dy Using matrix representation
3D Rendering and Ray Casting
 3D Rendering and Ray Casting Michael Kazhdan (601.457/657) HB Ch. 13.7, 14.6 FvDFH 15.5, 15.10 Rendering Generate an image from geometric primitives Rendering Geometric Primitives (3D) Raster Image (2D)
3D Rendering and Ray Casting Michael Kazhdan (601.457/657) HB Ch. 13.7, 14.6 FvDFH 15.5, 15.10 Rendering Generate an image from geometric primitives Rendering Geometric Primitives (3D) Raster Image (2D)
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
MA 323 Geometric Modelling Course Notes: Day 21 Three Dimensional Bezier Curves, Projections and Rational Bezier Curves
 MA 323 Geometric Modelling Course Notes: Day 21 Three Dimensional Bezier Curves, Projections and Rational Bezier Curves David L. Finn Over the next few days, we will be looking at extensions of Bezier
MA 323 Geometric Modelling Course Notes: Day 21 Three Dimensional Bezier Curves, Projections and Rational Bezier Curves David L. Finn Over the next few days, we will be looking at extensions of Bezier
Geometry ~ Chapter 1 Capacity Matrix
 Geometry ~ Chapter 1 Capacity Matrix Learning Targets 1. Drawing and labeling the Geometry Vocabulary 2. Using the distance and midpoint formula 3. Classifying triangles and polygons Section Required Assignments
Geometry ~ Chapter 1 Capacity Matrix Learning Targets 1. Drawing and labeling the Geometry Vocabulary 2. Using the distance and midpoint formula 3. Classifying triangles and polygons Section Required Assignments
Overview. By end of the week:
 Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
High-Dimensional Computational Geometry. Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018
 High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
Course no. DIS4566 National Chiao Tung Univ, Taiwan By: I-Chen Lin, Assistant Professor
 Computer Graphics 3. Viewing in 3D (b) Course no. DIS4566 National Chiao Tung Univ, Taiwan By: I-Chen Lin, Assistant Professor Textbook: E.Angel, Interactive Computer Graphics, 4 th Ed., Addison Wesley
Computer Graphics 3. Viewing in 3D (b) Course no. DIS4566 National Chiao Tung Univ, Taiwan By: I-Chen Lin, Assistant Professor Textbook: E.Angel, Interactive Computer Graphics, 4 th Ed., Addison Wesley
Lecture 3 Sections 2.2, 4.4. Mon, Aug 31, 2009
 Model s Lecture 3 Sections 2.2, 4.4 World s Eye s Clip s s s Window s Hampden-Sydney College Mon, Aug 31, 2009 Outline Model s World s Eye s Clip s s s Window s 1 2 3 Model s World s Eye s Clip s s s Window
Model s Lecture 3 Sections 2.2, 4.4 World s Eye s Clip s s s Window s Hampden-Sydney College Mon, Aug 31, 2009 Outline Model s World s Eye s Clip s s s Window s 1 2 3 Model s World s Eye s Clip s s s Window
CSE 167: Lecture #5: Rasterization. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012
 CSE 167: Introduction to Computer Graphics Lecture #5: Rasterization Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012 Announcements Homework project #2 due this Friday, October
CSE 167: Introduction to Computer Graphics Lecture #5: Rasterization Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012 Announcements Homework project #2 due this Friday, October
Geometry for Computer Graphics Part 1
 Geometry for Computer Graphics Part 1 MSc Computer Games and Entertainment Maths & Graphics Unit 2012/13 Lecturer(s): Frederic Fol Leymarie (in collaboration with Gareth Edwards) 1 First - For Complete
Geometry for Computer Graphics Part 1 MSc Computer Games and Entertainment Maths & Graphics Unit 2012/13 Lecturer(s): Frederic Fol Leymarie (in collaboration with Gareth Edwards) 1 First - For Complete
Computational Geometry TOPICS Preliminaries Point in a Polygon Polygon Construction Convex Hulls
 Computational Geometry TOPICS Preliminaries Point in a Polygon Polygon Construction Convex Hulls CSE5311 Kumar 1 Geometric Algorithms Geometric Algorithms find applications in such areas as Computer Graphics
Computational Geometry TOPICS Preliminaries Point in a Polygon Polygon Construction Convex Hulls CSE5311 Kumar 1 Geometric Algorithms Geometric Algorithms find applications in such areas as Computer Graphics
Numerical Optimization
 Convex Sets Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on Let x 1, x 2 R n, x 1 x 2. Line and line segment Line passing through x 1 and x 2 : {y
Convex Sets Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on Let x 1, x 2 R n, x 1 x 2. Line and line segment Line passing through x 1 and x 2 : {y
a triangle with all acute angles acute triangle angles that share a common side and vertex adjacent angles alternate exterior angles
 acute triangle a triangle with all acute angles adjacent angles angles that share a common side and vertex alternate exterior angles two non-adjacent exterior angles on opposite sides of the transversal;
acute triangle a triangle with all acute angles adjacent angles angles that share a common side and vertex alternate exterior angles two non-adjacent exterior angles on opposite sides of the transversal;
Cs602-computer graphics MCQS MIDTERM EXAMINATION SOLVED BY ~ LIBRIANSMINE ~
 Cs602-computer graphics MCQS MIDTERM EXAMINATION SOLVED BY ~ LIBRIANSMINE ~ Question # 1 of 10 ( Start time: 08:04:29 PM ) Total Marks: 1 Sutherland-Hodgeman clipping algorithm clips any polygon against
Cs602-computer graphics MCQS MIDTERM EXAMINATION SOLVED BY ~ LIBRIANSMINE ~ Question # 1 of 10 ( Start time: 08:04:29 PM ) Total Marks: 1 Sutherland-Hodgeman clipping algorithm clips any polygon against
COMP3421. Vector geometry, Clipping
 COMP3421 Vector geometry, Clipping Transformations Object in model co-ordinates Transform into world co-ordinates Represent points in object as 1D Matrices Multiply by matrices to transform them Coordinate
COMP3421 Vector geometry, Clipping Transformations Object in model co-ordinates Transform into world co-ordinates Represent points in object as 1D Matrices Multiply by matrices to transform them Coordinate
Fall CSCI 420: Computer Graphics. 2.2 Transformations. Hao Li.
 Fall 2017 CSCI 420: Computer Graphics 2.2 Transformations Hao Li http://cs420.hao-li.com 1 OpenGL Transformations Matrices Model-view matrix (4x4 matrix) Projection matrix (4x4 matrix) vertices in 3D Model-view
Fall 2017 CSCI 420: Computer Graphics 2.2 Transformations Hao Li http://cs420.hao-li.com 1 OpenGL Transformations Matrices Model-view matrix (4x4 matrix) Projection matrix (4x4 matrix) vertices in 3D Model-view
Geometry Midterm Review Packet Answer Section
 Geometry Midterm Review Packet Answer Section 1. ANS: 33, 39 REF: 1-1 Patterns and Inductive Reasoning TOP: 1-1 Example 1 2. ANS: 5 243, 5 729 REF: 1-1 Patterns and Inductive Reasoning TOP: 1-1 Example
Geometry Midterm Review Packet Answer Section 1. ANS: 33, 39 REF: 1-1 Patterns and Inductive Reasoning TOP: 1-1 Example 1 2. ANS: 5 243, 5 729 REF: 1-1 Patterns and Inductive Reasoning TOP: 1-1 Example
Today. Rendering pipeline. Rendering pipeline. Object vs. Image order. Rendering engine Rendering engine (jtrt) Computergrafik. Rendering pipeline
 Computergrafik. Rendering pipeline") Computergrafik Today Rendering pipeline s View volumes, clipping Viewport Matthias Zwicker Universität Bern Herbst 2008 Rendering pipeline Rendering pipeline Hardware & software that draws 3D scenes on
Computergrafik Today Rendering pipeline s View volumes, clipping Viewport Matthias Zwicker Universität Bern Herbst 2008 Rendering pipeline Rendering pipeline Hardware & software that draws 3D scenes on
Overview. Affine Transformations (2D and 3D) Coordinate System Transformations Vectors Rays and Intersections
 Coordinate System Transformations Vectors Rays and Intersections") Overview Affine Transformations (2D and 3D) Coordinate System Transformations Vectors Rays and Intersections ITCS 4120/5120 1 Mathematical Fundamentals Geometric Transformations A set of tools that aid
Overview Affine Transformations (2D and 3D) Coordinate System Transformations Vectors Rays and Intersections ITCS 4120/5120 1 Mathematical Fundamentals Geometric Transformations A set of tools that aid
CS 130 Exam I. Fall 2015
 CS 130 Exam I Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is
CS 130 Exam I Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is