Specular Reflection Separation using Dark Channel Prior
|
|
|
- Doris Dixon
- 6 years ago
- Views:
Transcription




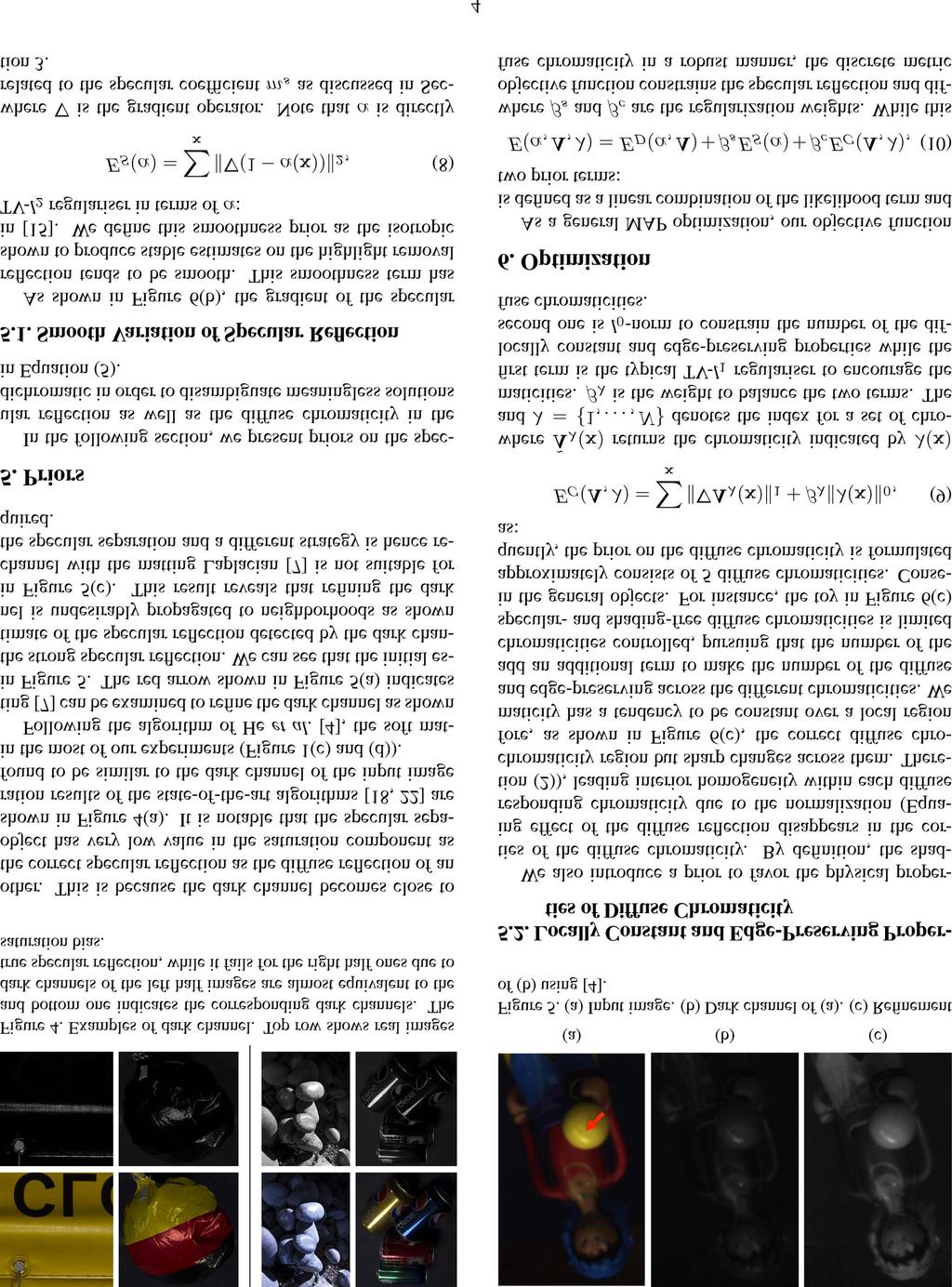
1 2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST Hailin Jin Adobe Research Sunil Hadap Adobe Research Inso Kweon KAIST Abstract We present a novel method to separate specular reflection from a single image. Separating an image into diffuse and specular components is an ill-posed problem due to lack of observations. Existing methods rely on a specularfree image to detect and estimate specularity, which however may confuse diffuse pixels with the same hue but a different saturation value as specular pixels. Our method is based on a novel observation that for most natural images the dark channel can provide an approximate specular-free image. We also propose a maximum a posteriori formulation which robustly recovers the specular reflection and chromaticity despite of the hue-saturation ambiguity. We demonstrate the effectiveness of the proposed algorithm on real and synthetic examples. Experimental results show that our method significantly outperforms the state-of-theart methods in separating specular reflection. 1. Introduction The observed color of an image is formed from the spectral energy distributions of the light reflected by the surface reflectance, and the intensity of the color is determined by the imaging geometry. This imaging process can also be explained in terms of the diffuse and specular reflections according to their physical properties. Diffuse reflection can be assumed to be associated only with the relative angle between the light direction and the surface normal among the imaging geometry regardless of the viewing direction, while specular reflection is dependent on the viewing direction. As shown in Figure 1(a), natural objects tend to have the diffuse property as well as the specular property on the reflection model. However, the behavior of the specular reflection often leads to problems in many computer vision applications such as stereo matching, segmentation, and recognition. Most of the applications simply consider the observed image as a diffuse reflection model, regarding the specular reflection as outliers. One of the notable works in separating specular reflection from a single image is studied by Tan and Ikeuchi [18]. (a) (c) (d) Figure 1. Specular separation. (a) Input image. (b) Our result. (c) Dark channel. (d) Result of [18]. Our result correctly distinguishes between diffuse and specular reflections, while the previous method inadequately recognizes the background region as specular reflection. Note that dark channel is similar to the specular component recovered by the previous method in many cases of natural images. Please refer to the electronic version for better visualization of all results in this paper. Their method shows a satisfactory result, however it fails in the presence of the colors which have the same hue component with different saturation one. This hue-saturation ambiguity has been an issue in the recent studies of the single image-based specular reflection separation. To address the limit of the previous approaches, we introduce the statistics that a diffuse pixel of natural images in general has very low intensity in at least one color channel, motivated by the dark channel prior [4]. As shown in Figure 1(c), the dark channel of an image provides a pseudo specular reflection result, which is similar to the previous result shown in Figure 1(d). In this paper, we also propose a maximum a posteriori (MAP) approach that incorporates priors in the (b) /13 $ IEEE DOI /CVPR
2 reflection model, resulting in more stable separation of the specular reflection shown in Figure 1(b). 2. Related Work Separating object reflectance into diffuse and specular components is one of the fundamental problems in the computer vision and graphics areas, which is made difficult by the subtle nature of the physics involved. Since the dichromatic reflection model [14] which represents the complex reflecting properties of a surface as a linear combination of the diffuse and specular components was introduced, this model has been adopted in modern approaches for color understanding. Based on the neutral interface reflection assumption [6, 3], the dichromatic model can be further simplified in a way that the spectral energy distribution of the specular component is approximated being identical to the one of incident light which is often regarded as pure white or estimated by [19]. To distinguish between diffuse and specular reflections from an observed image, most of approaches basically take into account the color information with the underlying dichromatic reflection model except for the hardware assisted method [20] which utilized a polarization reflectance model using Fresnel reflectance. Nayar et al. [12] improved this polarization-based method by incorporating color information that is the neighboring diffuse colors. Some efforts have been made in separating the reflections with multiple images. Advantages of using the multiview constraint come from the different physical properties of diffuse and specular reflections on the relation between lighting and viewing directions with respect to a surface normal. Sato and Ikeuchi [13] analyzed color signatures estimated from many images taken under a moving light source to compute specular reflection. Lin and Shum [9] took a couple of images with different light positions in order to obtain photometric images and estimate the intensities of the reflection components. The use of a pair of stereo images was also introduced by Lin et al. [8], where specular pixels are detected by color histogram and stereo correspondence is then employed to compute the corresponding diffuse components in other views. These approaches show satisfactory results in separating specular reflection, yet it is not always applicable in general cases due to the requirement of multiple images. Besides the multiple images-based approaches, there have been a number of literatures separating the reflections from a single image. These approaches can be categorized in three ways. First, Klinker et al. [5] and Bajscy et al. [2] identified specular and diffuse reflections on the basis of color segmentation. As the second category, Tan et al. [16] successfully separated highlight reflections by using repeated textures. The third category is the analysis on different color spaces. Mallick et al. [11] proposed an SUV color space which is composed of S and UV channels representing specular and diffuse components respectively. They extended the use of this color space to highlight removal by eroding S channel in [10]. Tan et al. [18, 17] demonstrated the effective algorithm in the chromaticity intensity space, which exploits a pseudo specular-free image to detect the diffuse pixels and iteratively propagates the maximum chromaticity of the diffuse component to adjacent neighborhoods. This approach was improved by Yang et al. [22] who developed a fast bilateral filtering [21] approach for the purpose of refining maximum chromaticity with neighboring pixels in real-time. In this paper, we present an approach that incorporates an effective pseudo specular-free image and priors for the separation of the specular reflection out of a single image. We show that the dark channel as an alternative pseudo specular-free image has merits against the previous one. In addition, our approach introduces priors on the specular reflection as well as the diffuse chromaticity in the dichromatic reflection model, whereas most of the previous methods only measure the fidelity to the reflection model. This naturally leads our formulation to a MAP problem. 3. Reflection Model Dichromatic reflection model [14] has been widely used for understanding reflection properties of a scene taken by a color image. We model an image as a linear combination of diffuse and specular reflections according to the dichromatic model. Denoting the diffuse and specular reflections by I d (x) and I s (x) respectively, the observed image I(x) is simply expressed as: I(x) =I d (x)+i s (x). (1) In our model, we represent the chromaticity of a color with the intensity normalized color vector: Ĩ(x) = I(x) c {r,g,b} I c(x), (2) where I c (x) is one of the color channels. Let Λ(x) and Γ(x) represent the chromaticities of the diffuse and specular components respectively. Then Equation (1) can be equivalently written as: I(x) =m d (x)λ(x)+m s (x)γ(x), (3) where m d and m s are the diffuse and specular reflection coefficients respectively, which depend on imaging geometry. We note that the diffuse chromaticity implies the inherent color of the surface while the specular chromaticity implies that of the illumination. Here, the specular chromaticity can be assumed to be uniform for a given image such that Γ r (x) =Γ g (x) =Γ b (x) =1/3. Without loss
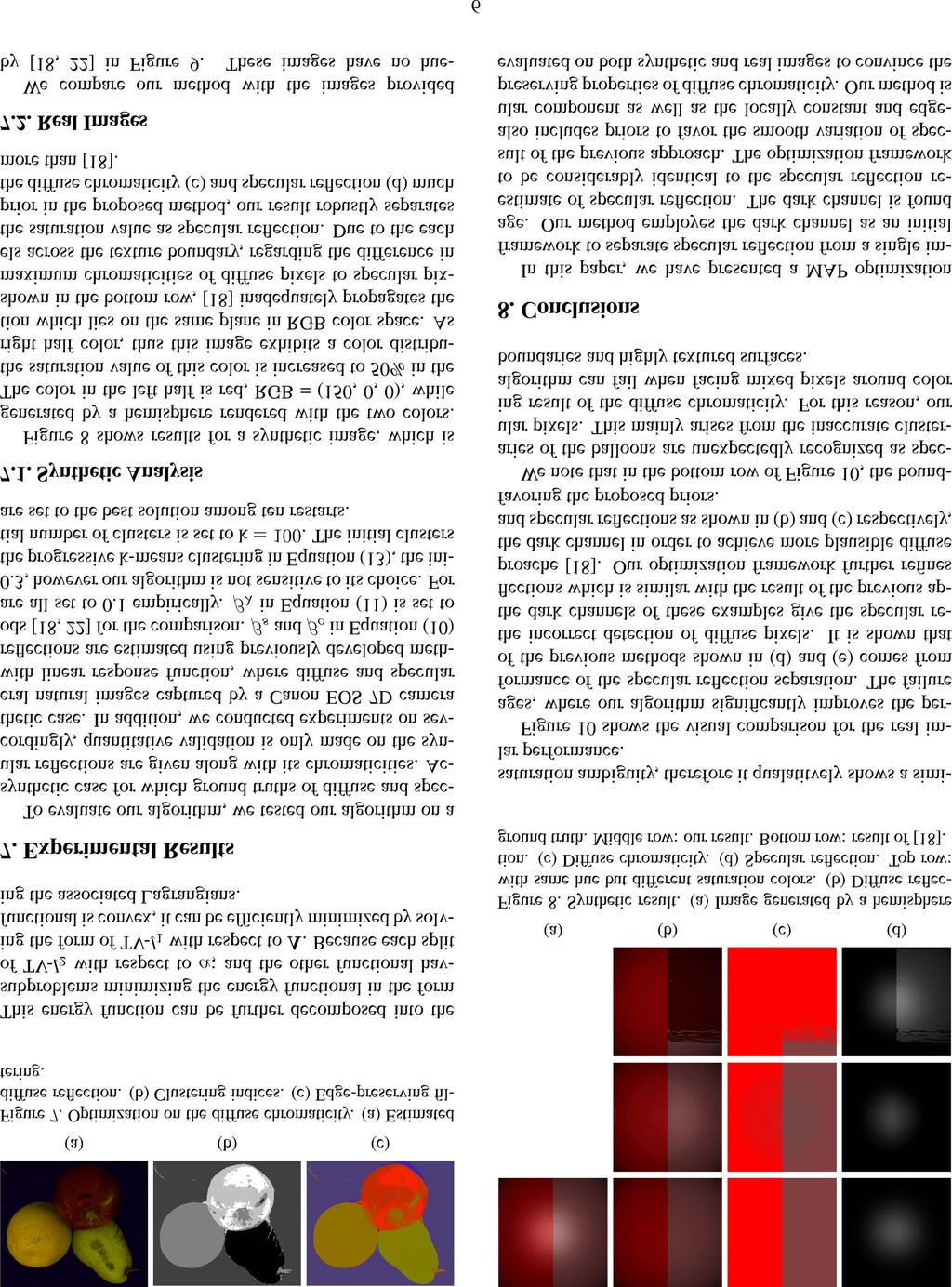
![100 50 (a) (b) (c) (a) (b) (c) (d) Figure 3. Comparison of pseudo specular-free images. (a) Input image. (b) Diffuse reflection of (a). (c) Our result. (d) Result of [18].](/docs-images/72/67361015/images/3-0.jpg "Our result is more closed to (b). In particular, the left parts of the hemispheres in (b) and (c) are identical. 0 200 100 0 50 100 150 200 250 (d) Figure 2.")
 Color distributions of (a) in the RGB space and (b) on the RG-plane. of generality, this can be achieved by normalizing the illumination chromaticity estimated from [19] as preprocessing step.")
 =m s (x)γ. In our formulation, we represent the dichromatic reflection model in the RG chromaticity space: Ĩ(x) =α(x)λ(x)+(1 α(x))γ, (4) where α = m d /(m d + m s ).")
 = ) 2 (Ĩ(x) (α(x)λ(x)+(1 α(x))γ). x (5) This data fidelity term is ill-posed with respect to α.")
3 (a) (b) (c) (a) (b) (c) (d) Figure 3. Comparison of pseudo specular-free images. (a) Input image. (b) Diffuse reflection of (a). (c) Our result. (d) Result of [18]. Our result is more closed to (b). In particular, the left parts of the hemispheres in (b) and (c) are identical (d) Figure 2. Geometric interpretation of our pseudo specular-free image and dark channel in the dichromatic reflection model. (a) Synthetic input image. (b) Pseudo specular-free image. (c) Dark channel. (d) Color distributions of (a) in the RGB space and (b) on the RG-plane. of generality, this can be achieved by normalizing the illumination chromaticity estimated from [19] as preprocessing step. Our goal is to estimate the specular reflection coefficient m s (x) from the observed single image I(x) so that the specular component I s (x) can be recovered, multiplied by the uniform specular chromaticity Γ, i.e., I s (x) =m s (x)γ. In our formulation, we represent the dichromatic reflection model in the RG chromaticity space: Ĩ(x) =α(x)λ(x)+(1 α(x))γ, (4) where α = m d /(m d + m s ). Note that the specular reflection coefficient can be easily recovered from m s = (1 α)(m d + m s ), where m d + m s = c {r,g,b} (m dλ c + m s Γ c )= c {r,g,b} I c. Therefore, we have the likelihood of the specular reflection separation as: E D (α, Λ) = ) 2 (Ĩ(x) (α(x)λ(x)+(1 α(x))γ). x (5) This data fidelity term is ill-posed with respect to α. The observed image only provides a partial constraint for the specular reflection coefficient as there are many counterparts of the diffuse reflection term resulting in the same observed image. This under-constrained problem can be resolved by specifying the diffuse chromaticity Λ. 4. Dark Channel and Pseudo Specular-Free Image To begin with, we shortly discuss typical algorithms and their limitations in determining the diffuse chromaticity Λ. Previous works [18, 22] utilize the pseudo specular-free image to detect the diffuse pixels and estimate the diffuse chromaticity, which is generated by shifting the maximum chromaticity of each pixel. However, these approaches are problematic especially when there exist pure diffuse reflections having the same hue but different saturation value since they are all detected as specular reflections. To address this issue and improve the general performance, we introduce a simple but effective pseudo specularfree image followed by an efficient optimization framework. Motivated by [4], we exploits the dark channel to derive a new pseudo specular-free image. Based on our observation that a diffuse pixel is likely to have very low intensity in at least one color channel for most of natural images, we consider the dark channel as the rough estimate of the specular reflection for the input image. Thus, we obtain our pseudo specular-free image I pseudo (x) by subtracting the dark channel I dark (x) from all color channels: Ic pseudo (x) = I c (x) I dark, (6) I dark (x) = min c(x). c {r,g,b} (7) Here, the dark channel is taken from the lowest intensity value among RGB channels at each pixel. As illustrated in Figure 2(d), this process is equivalent to project each pixel of the input image to one of the RG-, RB-, and, GBplanes along the illumination direction. In particular, the pseudo specular-free pixel (yellow dot) is obtained by projecting the pixel (green dot) of the input image to RG-plane along the illumination direction Γ. We note that this pseudo specular-free pixel has the incorrect diffuse coefficient m d and chromaticity Λ compared to the correct diffuse reflection component (red dot). We take the pseudo specular-free image and dark channel as the initial estimates of the diffuse and specular reflections respectively and then find the correct one by the optimization which will be explained later in detail. This scheme has a couple of benefits against the previous approach [18]. As shown in Figure 3, our pseudo specularfree image provides the direct estimate for the diffuse reflection. For instance, the left parts of the hemispheres in Figure 3 (b) and (c) are shown to be exactly identical to each
4

5
6
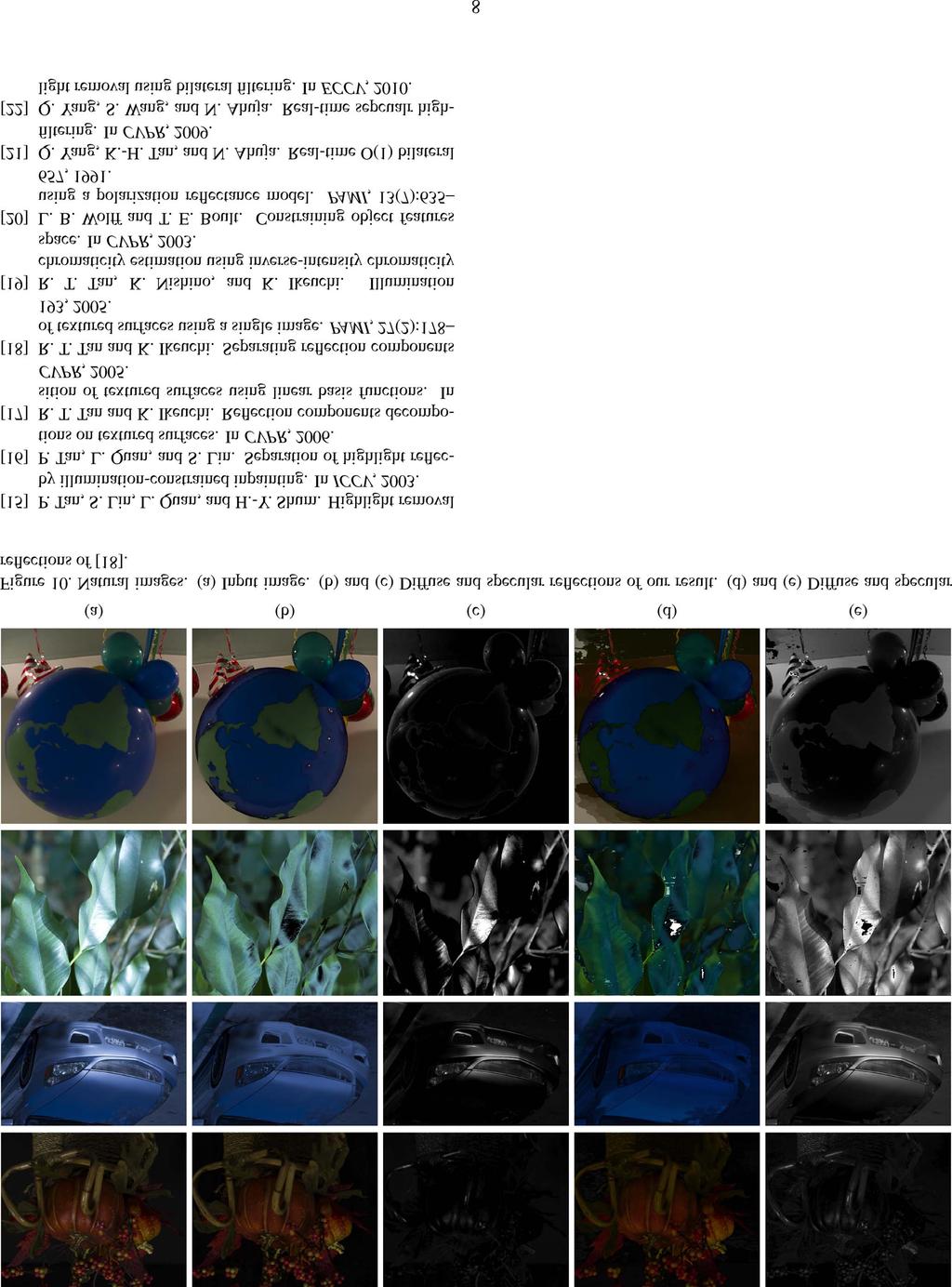
![(a) (b) (c) (d) (e) Figure 9. Qualitative comparison. (a) Input image. (b) and (c) Diffuse and specular reflections of our result. (d) Result of [18].](/docs-images/72/67361015/images/7-0.jpg "(e) Result of [22]. performance.")


![Acknowledgements This work is supported in part by Adobe System Incorporated and National Research Foundation of Korea 2012-0000986. References [1] J.-F. Aujol, G.](/docs-images/72/67361015/images/7-3.jpg "Gilboa, T. F. Chan, and S. Osher. Structuretexture image decomposition - modeling, algorithms, and parameter selection. IJCV, 67(1):111 136, 2006. [2] R. Bajcsy, S. W.")
![Lee, and A. Leonardis. Detection of diffuse and specular interface reflections and inter-reflections by color image segmentation. IJCV, 17(3):241 272, 1996. [3] G. D. Finlayson and G.](/docs-images/72/67361015/images/7-4.jpg "Schaefer. Solving for colour constancy using a constrained dichromatic reflection model. IJCV, 42(3):127 144, 2001. [4] K. He, J. Sun, and X. Tang.")
![Single image haze removal using dark channel prior. PAMI, 33(12):2341 2353, 2011. [5] G. J. Klinker, S. A. Shafer, and T. Kanade.](/docs-images/72/67361015/images/7-5.jpg "The measurement of highlights in color images. IJCV, 2(1):7 32, 1988. [6] H.-C. Lee, E. J. Breneman, and C. P. Schulte.")
![Modeling light reflection for computer color vision. PAMI, 12(4):402 409, 1990. [7] A. Levin, D. Lischinski, and Y. Weiss.](/docs-images/72/67361015/images/7-6.jpg "A closed-form solution to natural image matting. PAMI, 30(2):228 242, 2008. [8] S. Lin, Y. Li, S. B. Kang, X. Tong, and H.-Y. Shum.")
![Diffuse-specular separation and depth recovery from image sequences. In ECCV, 2002. [9] S. Lin and H.-Y. Shum.](/docs-images/72/67361015/images/7-7.jpg "Separation of diffuse and specular reflection in color images. In CVPR, 2001. [10] S. P. Mallick, T. Zickler, P. N. Belhumeur, and D. J. Kriegman.")
7 (a) (b) (c) (d) (e) Figure 9. Qualitative comparison. (a) Input image. (b) and (c) Diffuse and specular reflections of our result. (d) Result of [18]. (e) Result of [22]. performance. The proposed method achieves more robust results in the presence of two distinct diffuse colors having the same hue but different saturation value, and qualitatively outperforms the state-of-the-art methods for most of natural images. As discussed in the real examples, color boundaries are unfortunately found as specular pixels in some results. In the future work, we plan to reduce this artifact by improving the robustness of the clustering algorithm for the noise and highly textured surfaces. 9. Acknowledgements This work is supported in part by Adobe System Incorporated and National Research Foundation of Korea References [1] J.-F. Aujol, G. Gilboa, T. F. Chan, and S. Osher. Structuretexture image decomposition - modeling, algorithms, and parameter selection. IJCV, 67(1): , [2] R. Bajcsy, S. W. Lee, and A. Leonardis. Detection of diffuse and specular interface reflections and inter-reflections by color image segmentation. IJCV, 17(3): , [3] G. D. Finlayson and G. Schaefer. Solving for colour constancy using a constrained dichromatic reflection model. IJCV, 42(3): , [4] K. He, J. Sun, and X. Tang. Single image haze removal using dark channel prior. PAMI, 33(12): , [5] G. J. Klinker, S. A. Shafer, and T. Kanade. The measurement of highlights in color images. IJCV, 2(1):7 32, [6] H.-C. Lee, E. J. Breneman, and C. P. Schulte. Modeling light reflection for computer color vision. PAMI, 12(4): , [7] A. Levin, D. Lischinski, and Y. Weiss. A closed-form solution to natural image matting. PAMI, 30(2): , [8] S. Lin, Y. Li, S. B. Kang, X. Tong, and H.-Y. Shum. Diffuse-specular separation and depth recovery from image sequences. In ECCV, [9] S. Lin and H.-Y. Shum. Separation of diffuse and specular reflection in color images. In CVPR, [10] S. P. Mallick, T. Zickler, P. N. Belhumeur, and D. J. Kriegman. Specularity removal in images and videos: A PDE approach. In ECCV, [11] S. P. Mallick, T. Zickler, D. J. Kriegman, and P. N. Belhumeur. Beyond Lambert: reconstructing specular surfaces using color. In CVPR, [12] S. K. Nayar, X.-S. Fang, and T. Boult. Separation of reflection components using color and polarization. IJCV, 21(3): , [13] Y. Sato and K. Ikeuchi. Temporal-color space analysis of reflection. JOSA, 11(11): , [14] S. A. Shafer. Using color to separate reflection components. Color Res. Appl., 10(4): ,
8
Real-time highlight removal using intensity ratio
 Real-time highlight removal using intensity ratio Hui-Liang Shen* and Zhi-Huan Zheng Department of Information Science and Electronic Engineering, Zhejiang University, Hangzhou 3127, China *Corresponding
Real-time highlight removal using intensity ratio Hui-Liang Shen* and Zhi-Huan Zheng Department of Information Science and Electronic Engineering, Zhejiang University, Hangzhou 3127, China *Corresponding
Specularity Removal using Dark Channel Prior *
 JOURNAL OF INFORMATION SCIENCE AND ENGINEERING 29, 835-849 (2013) Specularity Removal using Dark Channel Prior * School of Information Science and Engineering Central South University Changsha, 410083
JOURNAL OF INFORMATION SCIENCE AND ENGINEERING 29, 835-849 (2013) Specularity Removal using Dark Channel Prior * School of Information Science and Engineering Central South University Changsha, 410083
Highlight detection with application to sweet pepper localization
 Ref: C0168 Highlight detection with application to sweet pepper localization Rotem Mairon and Ohad Ben-Shahar, the interdisciplinary Computational Vision Laboratory (icvl), Computer Science Dept., Ben-Gurion
Ref: C0168 Highlight detection with application to sweet pepper localization Rotem Mairon and Ohad Ben-Shahar, the interdisciplinary Computational Vision Laboratory (icvl), Computer Science Dept., Ben-Gurion
Physics-based Vision: an Introduction
 Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Color Structure Recovering in Strong Specular Text Regions
 Color Structure Recovering in Strong Specular Text Regions Tam Nguyen Saigon Technology University tam.nguyenthi@stu.edu.vn GueeSang Lee Chonnam National University Gwangju, Korea, 500-757 gslee@jnu.ac.kr
Color Structure Recovering in Strong Specular Text Regions Tam Nguyen Saigon Technology University tam.nguyenthi@stu.edu.vn GueeSang Lee Chonnam National University Gwangju, Korea, 500-757 gslee@jnu.ac.kr
Supplementary Material: Specular Highlight Removal in Facial Images
 Supplementary Material: Specular Highlight Removal in Facial Images Chen Li 1 Stephen Lin 2 Kun Zhou 1 Katsushi Ikeuchi 2 1 State Key Lab of CAD&CG, Zhejiang University 2 Microsoft Research 1. Computation
Supplementary Material: Specular Highlight Removal in Facial Images Chen Li 1 Stephen Lin 2 Kun Zhou 1 Katsushi Ikeuchi 2 1 State Key Lab of CAD&CG, Zhejiang University 2 Microsoft Research 1. Computation
Separation of specular and diffuse components using tensor voting in color images
 Separation of specular and diffuse components using tensor voting in color images Tam Nguyen, Quang Nhat Vo, Hyung-Jeong Yang, Soo-Hyung Kim, and Guee-Sang Lee* Department of Electronics and Computer Engineering,
Separation of specular and diffuse components using tensor voting in color images Tam Nguyen, Quang Nhat Vo, Hyung-Jeong Yang, Soo-Hyung Kim, and Guee-Sang Lee* Department of Electronics and Computer Engineering,
DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION. Department of Artificial Intelligence Kyushu Institute of Technology
 DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION Kouki Takechi Takahiro Okabe Department of Artificial Intelligence Kyushu Institute of Technology ABSTRACT Separating diffuse
DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION Kouki Takechi Takahiro Okabe Department of Artificial Intelligence Kyushu Institute of Technology ABSTRACT Separating diffuse
Photometric Stereo with Auto-Radiometric Calibration
 Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Photometric Stereo with Auto-Radiometric Calibration Wiennat Mongkulmann Takahiro Okabe Yoichi Sato Institute of Industrial Science, The University of Tokyo {wiennat,takahiro,ysato} @iis.u-tokyo.ac.jp
Efficient Photometric Stereo on Glossy Surfaces with Wide Specular Lobes
 Efficient Photometric Stereo on Glossy Surfaces with Wide Specular Lobes Hin-Shun Chung Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {hschung,leojia}@cse.cuhk.edu.hk
Efficient Photometric Stereo on Glossy Surfaces with Wide Specular Lobes Hin-Shun Chung Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {hschung,leojia}@cse.cuhk.edu.hk
Physics-based Fast Single Image Fog Removal
 Physics-based Fast Single Image Fog Removal Jing Yu 1, Chuangbai Xiao 2, Dapeng Li 2 1 Department of Electronic Engineering, Tsinghua University, Beijing, 100084, China 2 College of Computer Science and
Physics-based Fast Single Image Fog Removal Jing Yu 1, Chuangbai Xiao 2, Dapeng Li 2 1 Department of Electronic Engineering, Tsinghua University, Beijing, 100084, China 2 College of Computer Science and
Beyond Lambert: Reconstructing Specular Surfaces Using Color
 To appear in Proc. IEEE Conf. Computer Vision and Pattern Recognition (CVPR) 2005 Beyond Lambert: Reconstructing Specular Surfaces Using Color Satya P. Mallick Todd E. Zickler David J. Kriegman Peter N.
To appear in Proc. IEEE Conf. Computer Vision and Pattern Recognition (CVPR) 2005 Beyond Lambert: Reconstructing Specular Surfaces Using Color Satya P. Mallick Todd E. Zickler David J. Kriegman Peter N.
Separating Reflection Components in Images under Multispectral and Multidirectional Light Sources
 2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 Separating Reflection Components in Images under Multispectral and Multidirectional Light
2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 Separating Reflection Components in Images under Multispectral and Multidirectional Light
Color constancy through inverse-intensity chromaticity space
 Tan et al. Vol. 21, No. 3/March 2004/J. Opt. Soc. Am. A 321 Color constancy through inverse-intensity chromaticity space Robby T. Tan Department of Computer Science, The University of Tokyo, 4-6-1 Komaba,
Tan et al. Vol. 21, No. 3/March 2004/J. Opt. Soc. Am. A 321 Color constancy through inverse-intensity chromaticity space Robby T. Tan Department of Computer Science, The University of Tokyo, 4-6-1 Komaba,
Analysis of photometric factors based on photometric linearization
 3326 J. Opt. Soc. Am. A/ Vol. 24, No. 10/ October 2007 Mukaigawa et al. Analysis of photometric factors based on photometric linearization Yasuhiro Mukaigawa, 1, * Yasunori Ishii, 2 and Takeshi Shakunaga
3326 J. Opt. Soc. Am. A/ Vol. 24, No. 10/ October 2007 Mukaigawa et al. Analysis of photometric factors based on photometric linearization Yasuhiro Mukaigawa, 1, * Yasunori Ishii, 2 and Takeshi Shakunaga
Specularity Removal in Images and Videos: A PDE Approach
 Specularity Removal in Images and Videos: A PDE Approach Satya P. Mallick 1, Todd Zickler 2, Peter N. Belhumeur 3 and David J. Kriegman 1 1 Computer Science and Engineering, University of California at
Specularity Removal in Images and Videos: A PDE Approach Satya P. Mallick 1, Todd Zickler 2, Peter N. Belhumeur 3 and David J. Kriegman 1 1 Computer Science and Engineering, University of California at
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Ligh%ng and Reflectance
 Ligh%ng and Reflectance 2 3 4 Ligh%ng Ligh%ng can have a big effect on how an object looks. Modeling the effect of ligh%ng can be used for: Recogni%on par%cularly face recogni%on Shape reconstruc%on Mo%on
Ligh%ng and Reflectance 2 3 4 Ligh%ng Ligh%ng can have a big effect on how an object looks. Modeling the effect of ligh%ng can be used for: Recogni%on par%cularly face recogni%on Shape reconstruc%on Mo%on
A Bi-Illuminant Dichromatic Reflection Model for Understanding Images
 A Bi-Illuminant Dichromatic Reflection Model for Understanding Images Bruce A. Maxwell Tandent Vision Science, Inc. brucemaxwell@tandent.com Richard M. Friedhoff Tandent Vision Science, Inc. richardfriedhoff@tandent.com
A Bi-Illuminant Dichromatic Reflection Model for Understanding Images Bruce A. Maxwell Tandent Vision Science, Inc. brucemaxwell@tandent.com Richard M. Friedhoff Tandent Vision Science, Inc. richardfriedhoff@tandent.com
An Approach for Reduction of Rain Streaks from a Single Image
 An Approach for Reduction of Rain Streaks from a Single Image Vijayakumar Majjagi 1, Netravati U M 2 1 4 th Semester, M. Tech, Digital Electronics, Department of Electronics and Communication G M Institute
An Approach for Reduction of Rain Streaks from a Single Image Vijayakumar Majjagi 1, Netravati U M 2 1 4 th Semester, M. Tech, Digital Electronics, Department of Electronics and Communication G M Institute
Variational Multiframe Stereo in the Presence of Specular Reflections
 Variational Multiframe Stereo in the Presence of Specular Reflections Hailin Jin Anthony J. Yezzi Stefano Soatto Electrical Engineering, Washington University, Saint Louis, MO 6330 Electrical and Computer
Variational Multiframe Stereo in the Presence of Specular Reflections Hailin Jin Anthony J. Yezzi Stefano Soatto Electrical Engineering, Washington University, Saint Louis, MO 6330 Electrical and Computer
Hybrid Textons: Modeling Surfaces with Reflectance and Geometry
 Hybrid Textons: Modeling Surfaces with Reflectance and Geometry Jing Wang and Kristin J. Dana Electrical and Computer Engineering Department Rutgers University Piscataway, NJ, USA {jingwang,kdana}@caip.rutgers.edu
Hybrid Textons: Modeling Surfaces with Reflectance and Geometry Jing Wang and Kristin J. Dana Electrical and Computer Engineering Department Rutgers University Piscataway, NJ, USA {jingwang,kdana}@caip.rutgers.edu
Blind Image Deblurring Using Dark Channel Prior
 Blind Image Deblurring Using Dark Channel Prior Jinshan Pan 1,2,3, Deqing Sun 2,4, Hanspeter Pfister 2, and Ming-Hsuan Yang 3 1 Dalian University of Technology 2 Harvard University 3 UC Merced 4 NVIDIA
Blind Image Deblurring Using Dark Channel Prior Jinshan Pan 1,2,3, Deqing Sun 2,4, Hanspeter Pfister 2, and Ming-Hsuan Yang 3 1 Dalian University of Technology 2 Harvard University 3 UC Merced 4 NVIDIA
Stereo Vision II: Dense Stereo Matching
 Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Shadow detection and removal from a single image
 Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
PHOTOMETRIC STEREO FOR NON-LAMBERTIAN SURFACES USING COLOR INFORMATION
 PHOTOMETRIC STEREO FOR NON-LAMBERTIAN SURFACES USING COLOR INFORMATION KARSTEN SCHLÜNS Fachgebiet Computer Vision, Institut für Technische Informatik Technische Universität Berlin, Franklinstr. 28/29,
PHOTOMETRIC STEREO FOR NON-LAMBERTIAN SURFACES USING COLOR INFORMATION KARSTEN SCHLÜNS Fachgebiet Computer Vision, Institut für Technische Informatik Technische Universität Berlin, Franklinstr. 28/29,
Colour Reading: Chapter 6. Black body radiators
 Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
An Improvement of the Occlusion Detection Performance in Sequential Images Using Optical Flow
 , pp.247-251 http://dx.doi.org/10.14257/astl.2015.99.58 An Improvement of the Occlusion Detection Performance in Sequential Images Using Optical Flow Jin Woo Choi 1, Jae Seoung Kim 2, Taeg Kuen Whangbo
, pp.247-251 http://dx.doi.org/10.14257/astl.2015.99.58 An Improvement of the Occlusion Detection Performance in Sequential Images Using Optical Flow Jin Woo Choi 1, Jae Seoung Kim 2, Taeg Kuen Whangbo
Single Image Highlight Removal with a Sparse and Low-Rank Reflection Model
 Single Image Highlight Removal with a Sparse and Low-Rank Reflection Model Jie Guo 1, Zuojian Zhou 2, and Limin Wang 1 1 State Key Lab for Novel Software Technology, Nanjing University, China 2 School
Single Image Highlight Removal with a Sparse and Low-Rank Reflection Model Jie Guo 1, Zuojian Zhou 2, and Limin Wang 1 1 State Key Lab for Novel Software Technology, Nanjing University, China 2 School
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON. Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij
 COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij Intelligent Systems Lab Amsterdam, University of Amsterdam ABSTRACT Performance
COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij Intelligent Systems Lab Amsterdam, University of Amsterdam ABSTRACT Performance
Radiance. Pixels measure radiance. This pixel Measures radiance along this ray
 Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
High Quality Shape from a Single RGB-D Image under Uncalibrated Natural Illumination
 High Quality Shape from a Single RGB-D Image under Uncalibrated Natural Illumination Yudeog Han Joon-Young Lee In So Kweon Robotics and Computer Vision Lab., KAIST ydhan@rcv.kaist.ac.kr jylee@rcv.kaist.ac.kr
High Quality Shape from a Single RGB-D Image under Uncalibrated Natural Illumination Yudeog Han Joon-Young Lee In So Kweon Robotics and Computer Vision Lab., KAIST ydhan@rcv.kaist.ac.kr jylee@rcv.kaist.ac.kr
A FAST METHOD OF FOG AND HAZE REMOVAL
 A FAST METHOD OF FOG AND HAZE REMOVAL Veeranjaneyulu Toka, Nandan Hosagrahara Sankaramurthy, Ravi Prasad Mohan Kini, Prasanna Kumar Avanigadda, Sibsambhu Kar Samsung R& D Institute India, Bangalore, India
A FAST METHOD OF FOG AND HAZE REMOVAL Veeranjaneyulu Toka, Nandan Hosagrahara Sankaramurthy, Ravi Prasad Mohan Kini, Prasanna Kumar Avanigadda, Sibsambhu Kar Samsung R& D Institute India, Bangalore, India
Object Shape and Reflectance Modeling from Color Image Sequence
 Object Shape and Reflectance Modeling from Color Image Sequence Yoichi Sato CMU-RI-TR-97-06 Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the field of Robotics
Object Shape and Reflectance Modeling from Color Image Sequence Yoichi Sato CMU-RI-TR-97-06 Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the field of Robotics
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
A Factorization Method for Structure from Planar Motion
 A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
Illumination Estimation from Shadow Borders
 Illumination Estimation from Shadow Borders Alexandros Panagopoulos, Tomás F. Yago Vicente, Dimitris Samaras Stony Brook University Stony Brook, NY, USA {apanagop, tyagovicente, samaras}@cs.stonybrook.edu
Illumination Estimation from Shadow Borders Alexandros Panagopoulos, Tomás F. Yago Vicente, Dimitris Samaras Stony Brook University Stony Brook, NY, USA {apanagop, tyagovicente, samaras}@cs.stonybrook.edu
On the distribution of colors in natural images
 On the distribution of colors in natural images A. Buades, J.L Lisani and J.M. Morel 1 Introduction When analyzing the RGB distribution of colors in natural images we notice that they are organized into
On the distribution of colors in natural images A. Buades, J.L Lisani and J.M. Morel 1 Introduction When analyzing the RGB distribution of colors in natural images we notice that they are organized into
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
HOW USEFUL ARE COLOUR INVARIANTS FOR IMAGE RETRIEVAL?
 HOW USEFUL ARE COLOUR INVARIANTS FOR IMAGE RETRIEVAL? Gerald Schaefer School of Computing and Technology Nottingham Trent University Nottingham, U.K. Gerald.Schaefer@ntu.ac.uk Abstract Keywords: The images
HOW USEFUL ARE COLOUR INVARIANTS FOR IMAGE RETRIEVAL? Gerald Schaefer School of Computing and Technology Nottingham Trent University Nottingham, U.K. Gerald.Schaefer@ntu.ac.uk Abstract Keywords: The images
Robust Airlight Estimation for Haze Removal from a Single Image
 Robust Airlight Estimation for Haze Removal from a Single Image Matteo Pedone and Janne Heikkilä Machine Vision Group, University of Oulu, Finland matped,jth@ee.oulu.fi Abstract Present methods for haze
Robust Airlight Estimation for Haze Removal from a Single Image Matteo Pedone and Janne Heikkilä Machine Vision Group, University of Oulu, Finland matped,jth@ee.oulu.fi Abstract Present methods for haze
Light source estimation using feature points from specular highlights and cast shadows
 Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Automatic Shadow Removal by Illuminance in HSV Color Space
 Computer Science and Information Technology 3(3): 70-75, 2015 DOI: 10.13189/csit.2015.030303 http://www.hrpub.org Automatic Shadow Removal by Illuminance in HSV Color Space Wenbo Huang 1, KyoungYeon Kim
Computer Science and Information Technology 3(3): 70-75, 2015 DOI: 10.13189/csit.2015.030303 http://www.hrpub.org Automatic Shadow Removal by Illuminance in HSV Color Space Wenbo Huang 1, KyoungYeon Kim
Intrinsic Image Decomposition with Non-Local Texture Cues
 Intrinsic Image Decomposition with Non-Local Texture Cues Li Shen Microsoft Research Asia Ping Tan National University of Singapore Stephen Lin Microsoft Research Asia Abstract We present a method for
Intrinsic Image Decomposition with Non-Local Texture Cues Li Shen Microsoft Research Asia Ping Tan National University of Singapore Stephen Lin Microsoft Research Asia Abstract We present a method for
Illumination Estimation Using a Multilinear Constraint on Dichromatic Planes
 Illumination Estimation Using a Multilinear Constraint on Dichromatic Planes Javier Toro 1 and Brian Funt 2 LBMU 1, Centre Hospitalier de l Université de Montréal Montréal, QC, Canada H2L 2W5 School of
Illumination Estimation Using a Multilinear Constraint on Dichromatic Planes Javier Toro 1 and Brian Funt 2 LBMU 1, Centre Hospitalier de l Université de Montréal Montréal, QC, Canada H2L 2W5 School of
Three-Dimensional Measurement for Specular Reflection Surface Based on Reflection Component Separation and Priority Region Filling Theory
 sensors Article Three-Dimensional Measurement for Specular Reflection Surface Based on Reflection Component Separation and Priority Region Filling Theory Xiaoming Sun *, Ye Liu, Xiaoyang Yu *, Haibin Wu
sensors Article Three-Dimensional Measurement for Specular Reflection Surface Based on Reflection Component Separation and Priority Region Filling Theory Xiaoming Sun *, Ye Liu, Xiaoyang Yu *, Haibin Wu
Computational Photography and Video: Intrinsic Images. Prof. Marc Pollefeys Dr. Gabriel Brostow
 Computational Photography and Video: Intrinsic Images Prof. Marc Pollefeys Dr. Gabriel Brostow Last Week Schedule Computational Photography and Video Exercises 18 Feb Introduction to Computational Photography
Computational Photography and Video: Intrinsic Images Prof. Marc Pollefeys Dr. Gabriel Brostow Last Week Schedule Computational Photography and Video Exercises 18 Feb Introduction to Computational Photography
Applications of Light Polarization in Vision
 Applications of Light Polarization in Vision Lecture #18 Thanks to Yoav Schechner et al, Nayar et al, Larry Wolff, Ikeuchi et al Separating Reflected and Transmitted Scenes Michael Oprescu, www.photo.net
Applications of Light Polarization in Vision Lecture #18 Thanks to Yoav Schechner et al, Nayar et al, Larry Wolff, Ikeuchi et al Separating Reflected and Transmitted Scenes Michael Oprescu, www.photo.net
3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO., 1 3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption Yael Moses Member, IEEE and Ilan Shimshoni Member,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO., 1 3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption Yael Moses Member, IEEE and Ilan Shimshoni Member,
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Lecture 24: More on Reflectance CAP 5415
 Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
CHAPTER 9. Classification Scheme Using Modified Photometric. Stereo and 2D Spectra Comparison
 CHAPTER 9 Classification Scheme Using Modified Photometric Stereo and 2D Spectra Comparison 9.1. Introduction In Chapter 8, even we combine more feature spaces and more feature generators, we note that
CHAPTER 9 Classification Scheme Using Modified Photometric Stereo and 2D Spectra Comparison 9.1. Introduction In Chapter 8, even we combine more feature spaces and more feature generators, we note that
Separating Reflections in Human Iris Images for Illumination Estimation
 Separating Reflections in Human Iris Images for Illumination Estimation Huiqiong Wang Zhejiang University Stephen Lin Microsoft Research Asia Xiaopei Liu Huazhong Univ. of Sci. and Tech. Sing Bing Kang
Separating Reflections in Human Iris Images for Illumination Estimation Huiqiong Wang Zhejiang University Stephen Lin Microsoft Research Asia Xiaopei Liu Huazhong Univ. of Sci. and Tech. Sing Bing Kang
Light, Color, and Surface Reflectance. Shida Beigpour
 Light, Color, and Surface Reflectance Shida Beigpour Overview Introduction Multi-illuminant Intrinsic Image Estimation Multi-illuminant Scene Datasets Multi-illuminant Color Constancy Conclusions 2 Introduction
Light, Color, and Surface Reflectance Shida Beigpour Overview Introduction Multi-illuminant Intrinsic Image Estimation Multi-illuminant Scene Datasets Multi-illuminant Color Constancy Conclusions 2 Introduction
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Image Resizing Based on Gradient Vector Flow Analysis
 Image Resizing Based on Gradient Vector Flow Analysis Sebastiano Battiato battiato@dmi.unict.it Giovanni Puglisi puglisi@dmi.unict.it Giovanni Maria Farinella gfarinellao@dmi.unict.it Daniele Ravì rav@dmi.unict.it
Image Resizing Based on Gradient Vector Flow Analysis Sebastiano Battiato battiato@dmi.unict.it Giovanni Puglisi puglisi@dmi.unict.it Giovanni Maria Farinella gfarinellao@dmi.unict.it Daniele Ravì rav@dmi.unict.it
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
1. Introduction. Volume 6 Issue 5, May Licensed Under Creative Commons Attribution CC BY. Shahenaz I. Shaikh 1, B. S.
 A Fast Single Image Haze Removal Algorithm Using Color Attenuation Prior and Pixel Minimum Channel Shahenaz I. Shaikh 1, B. S. Kapre 2 1 Department of Computer Science and Engineering, Mahatma Gandhi Mission
A Fast Single Image Haze Removal Algorithm Using Color Attenuation Prior and Pixel Minimum Channel Shahenaz I. Shaikh 1, B. S. Kapre 2 1 Department of Computer Science and Engineering, Mahatma Gandhi Mission
Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation
 ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
Overview. Video. Overview 4/7/2008. Optical flow. Why estimate motion? Motion estimation: Optical flow. Motion Magnification Colorization.
 Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Improving Image Segmentation Quality Via Graph Theory
 International Symposium on Computers & Informatics (ISCI 05) Improving Image Segmentation Quality Via Graph Theory Xiangxiang Li, Songhao Zhu School of Automatic, Nanjing University of Post and Telecommunications,
International Symposium on Computers & Informatics (ISCI 05) Improving Image Segmentation Quality Via Graph Theory Xiangxiang Li, Songhao Zhu School of Automatic, Nanjing University of Post and Telecommunications,
SINGLE IMAGE FOG REMOVAL BASED ON FUSION STRATEGY
 SINGLE IMAGE FOG REMOVAL BASED ON FUSION STRATEGY ABSTRACT V. Thulasika and A. Ramanan Department of Computer Science, Faculty of Science, University of Jaffna, Sri Lanka v.thula.sika@gmail.com, a.ramanan@jfn.ac.lk
SINGLE IMAGE FOG REMOVAL BASED ON FUSION STRATEGY ABSTRACT V. Thulasika and A. Ramanan Department of Computer Science, Faculty of Science, University of Jaffna, Sri Lanka v.thula.sika@gmail.com, a.ramanan@jfn.ac.lk
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
DECOMPOSING and editing the illumination of a photograph
 IEEE TRANSACTIONS ON IMAGE PROCESSING, 2017 1 Illumination Decomposition for Photograph with Multiple Light Sources Ling Zhang, Qingan Yan, Zheng Liu, Hua Zou, and Chunxia Xiao, Member, IEEE Abstract Illumination
IEEE TRANSACTIONS ON IMAGE PROCESSING, 2017 1 Illumination Decomposition for Photograph with Multiple Light Sources Ling Zhang, Qingan Yan, Zheng Liu, Hua Zou, and Chunxia Xiao, Member, IEEE Abstract Illumination
Tracking system. Danica Kragic. Object Recognition & Model Based Tracking
 Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Removing Shadows from Images
 Removing Shadows from Images Zeinab Sadeghipour Kermani School of Computing Science Simon Fraser University Burnaby, BC, V5A 1S6 Mark S. Drew School of Computing Science Simon Fraser University Burnaby,
Removing Shadows from Images Zeinab Sadeghipour Kermani School of Computing Science Simon Fraser University Burnaby, BC, V5A 1S6 Mark S. Drew School of Computing Science Simon Fraser University Burnaby,
Specular Highlights Detection and Reduction with Multi-Flash Photography
 Specular Highlights Detection and Reduction with Multi-Flash Photography Rogerio Feris 1, Ramesh Raskar 2, Kar-Han Tan 3, 1 1 University of California, Santa Barbara, USA {rferis,mturk}@cs.ucsb.edu 2 Mitsubish
Specular Highlights Detection and Reduction with Multi-Flash Photography Rogerio Feris 1, Ramesh Raskar 2, Kar-Han Tan 3, 1 1 University of California, Santa Barbara, USA {rferis,mturk}@cs.ucsb.edu 2 Mitsubish
Dynamic Shape Tracking via Region Matching
 Dynamic Shape Tracking via Region Matching Ganesh Sundaramoorthi Asst. Professor of EE and AMCS KAUST (Joint work with Yanchao Yang) The Problem: Shape Tracking Given: exact object segmentation in frame1
Dynamic Shape Tracking via Region Matching Ganesh Sundaramoorthi Asst. Professor of EE and AMCS KAUST (Joint work with Yanchao Yang) The Problem: Shape Tracking Given: exact object segmentation in frame1
Real-Time Specular Highlight Removal Using the GPU
 Real-Time Specular Highlight Removal Using the GPU Costin A. Boiangiu, Razvan M. Oita, and Mihai Zaharescu Abstract This paper focuses on a computationally-intense image preprocessing technique, specular
Real-Time Specular Highlight Removal Using the GPU Costin A. Boiangiu, Razvan M. Oita, and Mihai Zaharescu Abstract This paper focuses on a computationally-intense image preprocessing technique, specular
Object Recoloring based on Intrinsic Image Estimation
 Object Recoloring based on Intrinsic Image Estimation Shida Beigpour, Joost van de Weijer Centre de Visio per Computador, Computer Science Department Universitat Autonoma de Barcelona, Edifci O, Campus
Object Recoloring based on Intrinsic Image Estimation Shida Beigpour, Joost van de Weijer Centre de Visio per Computador, Computer Science Department Universitat Autonoma de Barcelona, Edifci O, Campus
Extraction of surface normal and index of refraction using a pair of passive infrared polarimetric sensors
 Extraction of surface normal and index of refraction using a pair of passive infrared polarimetric sensors Firooz Sadjadi Lockheed Martin Corporation Saint Paul, Minnesota firooz.sadjadi@ieee.org Farzad
Extraction of surface normal and index of refraction using a pair of passive infrared polarimetric sensors Firooz Sadjadi Lockheed Martin Corporation Saint Paul, Minnesota firooz.sadjadi@ieee.org Farzad
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Determining Reflectance Parameters and Illumination Distribution from a Sparse Set of Images for View-dependent Image Synthesis
 Determining Reflectance Parameters and Illumination Distribution from a Sparse Set of Images for View-dependent Image Synthesis Ko Nishino, Zhengyou Zhang and Katsushi Ikeuchi Dept. of Info. Science, Grad.
Determining Reflectance Parameters and Illumination Distribution from a Sparse Set of Images for View-dependent Image Synthesis Ko Nishino, Zhengyou Zhang and Katsushi Ikeuchi Dept. of Info. Science, Grad.
Lambertian model of reflectance I: shape from shading and photometric stereo. Ronen Basri Weizmann Institute of Science
 Lambertian model of reflectance I: shape from shading and photometric stereo Ronen Basri Weizmann Institute of Science Variations due to lighting (and pose) Relief Dumitru Verdianu Flying Pregnant Woman
Lambertian model of reflectance I: shape from shading and photometric stereo Ronen Basri Weizmann Institute of Science Variations due to lighting (and pose) Relief Dumitru Verdianu Flying Pregnant Woman
Shape from Diffuse Polarisation
 Shape from Diffuse Polarisation Gary Atkinson and Edwin Hancock Department of Computer Science University of York, York, YO1 5DD, UK. atkinson@cs.york.ac.uk Abstract When unpolarised light is reflected
Shape from Diffuse Polarisation Gary Atkinson and Edwin Hancock Department of Computer Science University of York, York, YO1 5DD, UK. atkinson@cs.york.ac.uk Abstract When unpolarised light is reflected
Color. making some recognition problems easy. is 400nm (blue) to 700 nm (red) more; ex. X-rays, infrared, radio waves. n Used heavily in human vision
 to 700 nm (red) more; ex. X-rays, infrared, radio waves. n Used heavily in human vision") Color n Used heavily in human vision n Color is a pixel property, making some recognition problems easy n Visible spectrum for humans is 400nm (blue) to 700 nm (red) n Machines can see much more; ex. X-rays,
Color n Used heavily in human vision n Color is a pixel property, making some recognition problems easy n Visible spectrum for humans is 400nm (blue) to 700 nm (red) n Machines can see much more; ex. X-rays,
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Color Constancy from Illumination Changes
 (MIRU2004) 2004 7 153-8505 4-6-1 E E-mail: {rei,robby,ki}@cvl.iis.u-tokyo.ac.jp Finlayson [10] Color Constancy from Illumination Changes Rei KAWAKAMI,RobbyT.TAN, and Katsushi IKEUCHI Institute of Industrial
(MIRU2004) 2004 7 153-8505 4-6-1 E E-mail: {rei,robby,ki}@cvl.iis.u-tokyo.ac.jp Finlayson [10] Color Constancy from Illumination Changes Rei KAWAKAMI,RobbyT.TAN, and Katsushi IKEUCHI Institute of Industrial
Photometric Stereo With Non-Parametric and Spatially-Varying Reflectance
 Photometric Stereo With Non-Parametric and Spatially-Varying Reflectance Neil Alldrin Todd Zickler David Kriegman nalldrin@cs.ucsd.edu zickler@eecs.harvard.edu kriegman@cs.ucsd.edu University of California,
Photometric Stereo With Non-Parametric and Spatially-Varying Reflectance Neil Alldrin Todd Zickler David Kriegman nalldrin@cs.ucsd.edu zickler@eecs.harvard.edu kriegman@cs.ucsd.edu University of California,
Factorizing Scene Albedo and Depth from a Single Foggy Image
 Factorizing Scene Albedo and Depth from a Single Foggy Image Louis Kratz Ko Nishino Department of Computer Science, Drexel University Philadelphia, PA {lak24, kon}@drexel.edu Abstract Atmospheric conditions
Factorizing Scene Albedo and Depth from a Single Foggy Image Louis Kratz Ko Nishino Department of Computer Science, Drexel University Philadelphia, PA {lak24, kon}@drexel.edu Abstract Atmospheric conditions
Color Segmentation Based Depth Adjustment for 3D Model Reconstruction from a Single Input Image
 Color Segmentation Based Depth Adjustment for 3D Model Reconstruction from a Single Input Image Vicky Sintunata and Terumasa Aoki Abstract In order to create a good 3D model reconstruction from an image,
Color Segmentation Based Depth Adjustment for 3D Model Reconstruction from a Single Input Image Vicky Sintunata and Terumasa Aoki Abstract In order to create a good 3D model reconstruction from an image,
Reconstruction of Discrete Surfaces from Shading Images by Propagation of Geometric Features
 Reconstruction of Discrete Surfaces from Shading Images by Propagation of Geometric Features Achille Braquelaire and Bertrand Kerautret LaBRI, Laboratoire Bordelais de Recherche en Informatique UMR 58,
Reconstruction of Discrete Surfaces from Shading Images by Propagation of Geometric Features Achille Braquelaire and Bertrand Kerautret LaBRI, Laboratoire Bordelais de Recherche en Informatique UMR 58,
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging
 Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Image Segmentation Via Iterative Geodesic Averaging
 Image Segmentation Via Iterative Geodesic Averaging Asmaa Hosni, Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, Vienna University of Technology Favoritenstr.
Image Segmentation Via Iterative Geodesic Averaging Asmaa Hosni, Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, Vienna University of Technology Favoritenstr.
Histogram and watershed based segmentation of color images
 Histogram and watershed based segmentation of color images O. Lezoray H. Cardot LUSAC EA 2607 IUT Saint-Lô, 120 rue de l'exode, 50000 Saint-Lô, FRANCE Abstract A novel method for color image segmentation
Histogram and watershed based segmentation of color images O. Lezoray H. Cardot LUSAC EA 2607 IUT Saint-Lô, 120 rue de l'exode, 50000 Saint-Lô, FRANCE Abstract A novel method for color image segmentation
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
CSE 167: Lecture #7: Color and Shading. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011
 CSE 167: Introduction to Computer Graphics Lecture #7: Color and Shading Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday,
CSE 167: Introduction to Computer Graphics Lecture #7: Color and Shading Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday,
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Robust Model-Free Tracking of Non-Rigid Shape. Abstract
 Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840