6. Object Identification L AK S H M O U. E D U
|
|
|
- Sharon Hill
- 6 years ago
- Views:
Transcription
1 6. Object Identification L AK S H M O U. E D U
2 Objects Information extracted from spatial grids often need to be associated with objects not just an individual pixel Group of pixels that form a real-world entity Mountain range, city, thunderstorm, etc. We ll assume that we combine high-valued pixels into objects May have to transform original data into such a monotonic range Take absolute value of shear values Compute 300-T on infrared temperature Compute a weighted sum of two different fields
3 Techniques for object identification Segmentation Thresholding Region growing Hysteresis Quantization and clustering Global vs. local thresholds Border detection and graph searches Snakes and active contour algorithms
4 Binary Image: Thresholding Often need to classify within images Wish to create a binary image (values are 0 or 1) The simplest way is to threshold the image What does thresholding assume?
5 Impact of thresholding

 Pixels <")

6 Thresholding Thresholding assumes that the data values are enough to classify pixels Pixels > threshold are part of object(s) Pixels < threshold are part of background Can then call connected pixels an object
7 Binary Images -> Objects Once you have a binary image, can form objects An object consists of contiguous 1 pixels This process is called segmentation Representation of an object typically done in one of two ways: A label image where each pixel is assigned its object number Label of 0 could indicate background A data structure where each region contains a list of Pixels How to create an object from the binary image? Using a technique called region growing
8 Region Growing Algorithm For every pixel in the grid that is above threshold and not yet part of a region: 1. Start a new region 2. Assign pixel to this region 3. Check the 8-neighbors of the pixel If any of them is above threshold, go to step 2
9 Finding Objects using Region Growing Algorithm to find objects in binary image B(x,y) Initialize label image, L, to -1 ( unset ) Initialize num_labels to 0 For each x,y in image B If B(x,y) is 1 and L(x,y) is unset Increment num_labels Set L(x,y) to num_labels Grow region around x,y assigning L to num_labels in region
10 Region Growing (recursion) Region growing is a recursive process: Grow region around x,y assigning L to num_labels: For every pixel in the 8-neighborhood of x,y If B(pixel) is 1 and L(x,y) is unset {B is binary image; L is label} Set L(pixel) to num_labels Grow region around pixel assigning L to num_labels in region However, because images are large, the above recursion can cause stack overflow Replace recursion by using a list
11 Region Growing (stack) Unroll region growing using a dynamically growing stack Grow region around x,y assigning L to num_labels: Initialize empty stack Add pixel x,y to stack While stack is non-empty Pop pixel, p, from stack Set L(p) to num_regions For every pixel, p2, in the 8-neighborhood of p If B(p2) is 1 and L(p2) is unset {B is binary image; L is label} Add p2 to stack

12 Region Growing
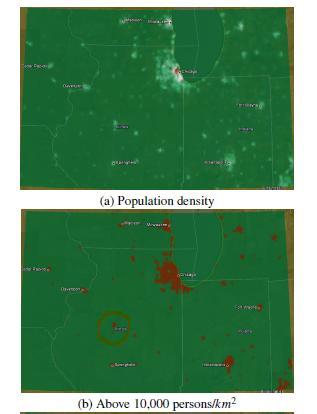
13 Problems with thresholding Low values of threshold read to highly noisy pixels Many pixels unnconnected to other high-density clusters A threshold of 10K finds Peoria for example An optimal threshold aka Otsu is not necessarily the most meaningful one High values of threshold make the extent of cities rather small Madison, WI is not just a few square kilometers
14 On Surface Albedo Data Thresholding surface albedo at 0.23 and 0.25 Assigning random colors to objects is an easy way to visualize the different objects What are the issues here?
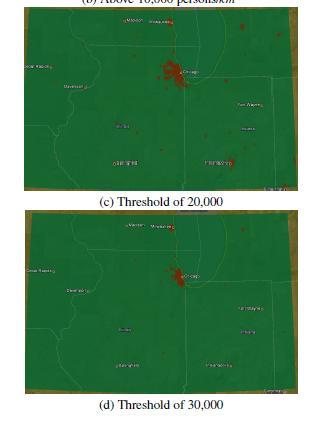
15 Thresholding is noisy The threshold provides a binary cutoff Two issues: If the data value oscillates in a neighborhood Broken objects If data just happens to go above threshold at a pixel Spurious, small objects How could you address this problem?


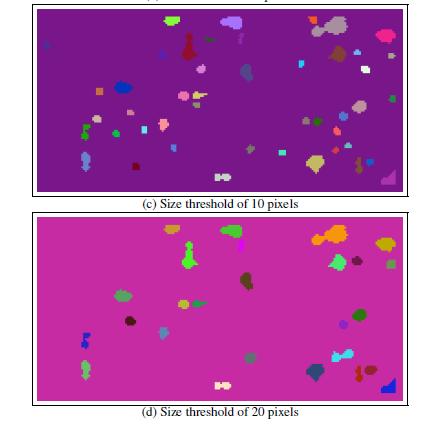
16 Size-based pruning Size is simply the number of pixels that share the same label Have to account for projection, of course
17 Problem with size-based pruning We have reduced the noise But have also lost Madison, Wisconsin
18 Hysteresis Hysteresis allows you to correct object identification while growing regions: The idea is to use two thresholds: One threshold (t1) to initialize an object A second (lower) threshold (t2) to identify the pixels that belong to that object An object consists of pixels above t2 that contain at least one pixel with value above t1
19 Hysteresis explained

20 On Surface Albedo data Using two thresholds: 0.23 and 0.25 with hysteresis

21 Multiple Thresholds Using multiple thresholds, can build a hierarchical segmentation Assuming a single threshold Or careful choice of thresholds if using hysteresis Essentially the same as quantizing the image Reducing the number of data levels What s done in analog-digital conversions!
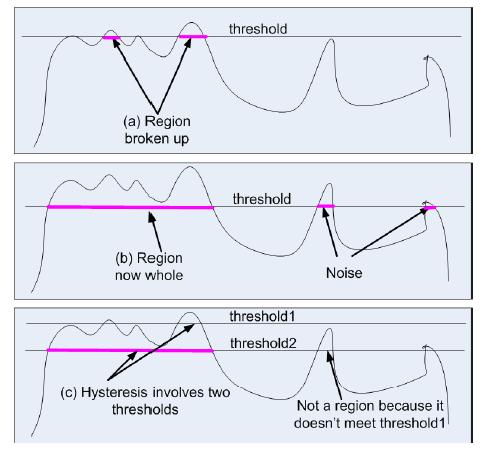
22 Watershed Transform Arrange all the pixels into a level set Traverse level set one level at a time starting at highest value
23 Watershed algorithm Three possibilities when considering any pixel: No overlap with any labeled region. We have a new maximum. Start flooding from here All labeled neighbors of this pixel belong to the same region. Update label of this pixel to the label of that region Some neighbors are labeled, but they belong to different maxima. Check influence zone of each maximum and assign pixel to closest

24 Example of watershed


25 Drawback of watershed algorithm Watershed algorithm tends to not work well on real-world fluid-like grids Too much texture Smoothing helps (here, after Gaussian filter)

26 Enhanced Watershed Transform Stop region growing when it reaches a certain size

27 Ewshed example

28 Ewshed after smoothing
29 Multiple spatial fields If you have multiple fields of data values projected on same grid For example: population density and terrain cover Can you create objects with similar densities and covers? Only similar density or only similar cover: simply threshold But both, taken together?
30 Vector quantization/clustering Clustering is a way of doing vector quantization At every pixel, you have a vector of data values The pixel location is itself a vector Cluster a vector consisting of: The values of each data value Pixel s row number Pixel s column number Define a distance between two vectors As a weighted Euclidean distance Could weight each component by its variance Mahalanobis distance Apply K-means clustering, assuming you want K objects
31 K-means clustering An iterative technique that follows the basic Expectation-Minimization approach Assume that all the pixels are assigned to one of K clusters 1. Compute the cluster s mean value 2. For every pixel in the image Compute distance of pixel from each of the cluster means If pixel is closer to a different cluster s mean, mark pixel to be moved to new cluster 3. Move all pixels that were marked to be moved 4. If any pixels were affected, or if number of iterations < MAXITER, go to step 1 How do you start with an assignment? Could randomly seed the points Or divide the domain equally to find initial centers
32 Clustering for Segmentation In images, the pixels are not independent Need to place an additional constraint on K-means Contiguity: adjacent pixels should ideally belong to the same cluster Compactness: clusters should not be overly large But advantage of K-means over just region growing: No dependence on thresholds Non-contiguous pixels can be part of same cluster
33 Contiguity-enhanced K-means Distance of a pixel from a cluster can be set up as a weighted average of: Discontiguity distance Fraction of neighbors who belong to a different cluster Distance based on data value Such as difference between pixel value and mean value of cluster Distance based on spatial location Such as Euclidean distance between pixel and centroid of cluster
34 But K-Means clustering requires you to know K What is K here? How likely are you to know it apriori?
35 K-means as refinement K is the number of objects No way to know it before hand Different images, even of the same type, will have differing K s Instead, can use threshold-based segmentation to find initial set of objects Then use K-means clustering to refine the segmentation Adding pixels on the boundaries Like hysteresis, except that that lower threshold is a function of distance and data value


36 On surface albedo Can be hard to come up with weights for the different components of a distance to ensure that clusters don t get too small or too large or drift away from original centers But these clusters are not realistic
37 Reimagine K On geophysical fields, better to think of objects in terms of data values alone, more akin to contouring Suppose you divide the data levels into K equal values? Put each pixel into its bin Then move pixel from its bin to the bin of its neighbors according to contiguity criteria Minimize cost function that is a weighted average of discontiguity and data value (no distance from centroid!) Can be carried out not just on the data value but on neighborhood statistics, such as texture V. Lakshmanan, R. Rabin, and V. DeBrunner, ``Multiscale storm identification and forecast,'' J. Atm. Res., vol. 67, pp , July 2003
38 On Surface Albedo With equal weights for data value and discontiguity and K=5
39 On Surface Albedo Weighting the discontiguity more (more iterations than previous)
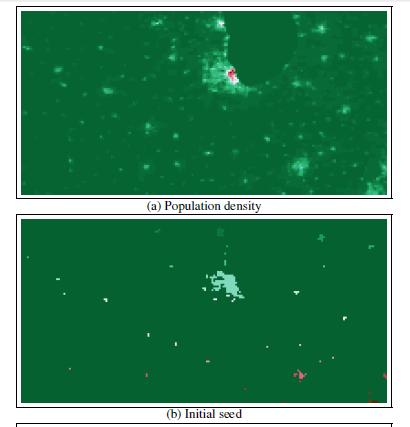
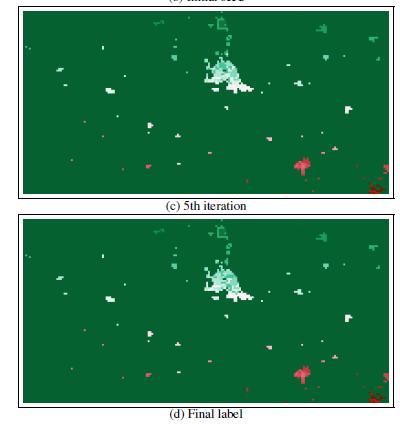
40 On population

41 Contours to Multiscale Once you have the data contoured, very simple to do multiscale representations (multiscale, not multiresolution)
42 Active Contours Rather than start from objects, what if you start from contours? Find the best possible separation between object and not-object A contour is curve with the following properties: Tightness i.e. as short as possible Smoothness i.e. not too bendy Separates two dissimilar areas A snake is an energy-minimization approach to find best contour Normally with an external constraint that represents user interaction Can set it to be zero for fully automated methods Kass, Witkin, Terzopoulos, 1988: Snakes: Active Contour Models; International Journal of Computer Vision,
43 Snakes explained Weighted sum of gradient + two energy terms (I used 0.3, 0.6, 0.1)

44 The snake depends on a good gradient


45 Better gradient, based on dilating and thresholding image

46 Snakes on population data
47 Choosing an Object Identification Technique Start off with a single global threshold + region growing Use Otsu s criterion to determine global threshold If results are too noisy or not relevant, try changing threshold If one threshold is not enough Because of too many small objects or too few objects Try hysteresis Because threshold is different in different parts of the image Try watershed If watershed fails because of texture Use enhanced watershed If pixel connectivity is a problem Use active contours Or contiguity-enhanced clustering Can combine contiguity-enhanced clustering + enhanced watershed
48 Region Properties Region growing identifies several regions that are not valid objects Can devise additional criteria for these clusters of pixels to decide whether or not they are objects geometric criteria: size, shape Temporal properties: how much change over time? Another spatial grid: average temperature within region, etc.
49 Orientation and aspect ratio Find orientation, aspect ratio by fitting objects to an ellipse Then find the eigen vectors of the matrix (S=epsilon) a, b are twice the magnitudes of the eigen vectors Get theta from angle between eigen vectors where the eigen vectors are:

50 Example ellipse fit
51 Geocoding objects Centroid of an object is the average of x and y Accounting for projection quite hard Assume our objects are small enough that this is enough Accurate geocoding relies on polygons to represent countries, states Find which polygon(s) the centroid lies within Or check each pixel of object and find where it lies Approximate geocoding is based on centroid alone Store center of each postal code Find closest center to centroid of object (Euclidean distance) Usually achieve reasonable results
52 Fitting lines To fit a single line to a bunch of points, use Least Squares: But what if you want to fit a bunch of lines to a bunch of points spread through out the grid?

53 Hough Transform Goal
54 Hough Transform Specify a line using formula: Maintain a bucket of possible (r,theta) values R in increments of 10 pixels Theta in increments of 20 degrees For every candidate point (x,y), add a vote to every (r,theta) that fits For every (r,theta), also maintain end-points Select the best 3 (r,theta) points Most number of votes Most density of points
Tuning an Algorithm for Identifying and Tracking Cells
 Tuning an Algorithm for Identifying and Tracking Cells VA L L I A P PA L A K S H M A N A N N AT I O N A L S E V E R E S T O R M S L A B O R AT O R Y / U N I V E R S I T Y O F O K L A H O M A J U LY, 2
Tuning an Algorithm for Identifying and Tracking Cells VA L L I A P PA L A K S H M A N A N N AT I O N A L S E V E R E S T O R M S L A B O R AT O R Y / U N I V E R S I T Y O F O K L A H O M A J U LY, 2
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Data Mining Storm Attributes
 Data Mining Storm Attributes VA L L I A P PA L A K S H M A N A N N AT I O N A L S E V E R E S T O R M S L A B O R AT O R Y / U N I V E R S I T Y O F O K L A H O M A L A K S H M A N @ O U. E D U AT C I
Data Mining Storm Attributes VA L L I A P PA L A K S H M A N A N N AT I O N A L S E V E R E S T O R M S L A B O R AT O R Y / U N I V E R S I T Y O F O K L A H O M A L A K S H M A N @ O U. E D U AT C I
2D image segmentation based on spatial coherence
 2D image segmentation based on spatial coherence Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics
2D image segmentation based on spatial coherence Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics
Idea. Found boundaries between regions (edges) Didn t return the actual region
 Didn t return the actual region") Region Segmentation Idea Edge detection Found boundaries between regions (edges) Didn t return the actual region Segmentation Partition image into regions find regions based on similar pixel intensities,
Region Segmentation Idea Edge detection Found boundaries between regions (edges) Didn t return the actual region Segmentation Partition image into regions find regions based on similar pixel intensities,
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Segmentation of Images
 Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Image Processing. Bilkent University. CS554 Computer Vision Pinar Duygulu
 Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
IDENTIFYING AND TRACKING STORMS IN SATELLITE IMAGES
 IDENTIFYING AND TRACKING STORMS IN SATELLITE IMAGES V. Lakshmanan 1,2, R. Rabin 1,3, V. DeBrunner 2 1 National Severe Storms Laboratory, Norman OK 2 University of Oklahoma, Norman OK 3 University of Wisconsin,
IDENTIFYING AND TRACKING STORMS IN SATELLITE IMAGES V. Lakshmanan 1,2, R. Rabin 1,3, V. DeBrunner 2 1 National Severe Storms Laboratory, Norman OK 2 University of Oklahoma, Norman OK 3 University of Wisconsin,
Example 1: Regions. Image Segmentation. Example 3: Lines and Circular Arcs. Example 2: Straight Lines. Region Segmentation: Segmentation Criteria
 Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example 1: Regions. into linear
Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example 1: Regions. into linear
SYDE Winter 2011 Introduction to Pattern Recognition. Clustering
 SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
Introduction to Medical Imaging (5XSA0) Module 5
 Module 5") Introduction to Medical Imaging (5XSA0) Module 5 Segmentation Jungong Han, Dirk Farin, Sveta Zinger ( s.zinger@tue.nl ) 1 Outline Introduction Color Segmentation region-growing region-merging watershed
Introduction to Medical Imaging (5XSA0) Module 5 Segmentation Jungong Han, Dirk Farin, Sveta Zinger ( s.zinger@tue.nl ) 1 Outline Introduction Color Segmentation region-growing region-merging watershed
CHAPTER 4: CLUSTER ANALYSIS
 CHAPTER 4: CLUSTER ANALYSIS WHAT IS CLUSTER ANALYSIS? A cluster is a collection of data-objects similar to one another within the same group & dissimilar to the objects in other groups. Cluster analysis
CHAPTER 4: CLUSTER ANALYSIS WHAT IS CLUSTER ANALYSIS? A cluster is a collection of data-objects similar to one another within the same group & dissimilar to the objects in other groups. Cluster analysis
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
Unsupervised Learning : Clustering
 Unsupervised Learning : Clustering Things to be Addressed Traditional Learning Models. Cluster Analysis K-means Clustering Algorithm Drawbacks of traditional clustering algorithms. Clustering as a complex
Unsupervised Learning : Clustering Things to be Addressed Traditional Learning Models. Cluster Analysis K-means Clustering Algorithm Drawbacks of traditional clustering algorithms. Clustering as a complex
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
3. Data Structures for Image Analysis L AK S H M O U. E D U
 3. Data Structures for Image Analysis L AK S H M AN @ O U. E D U Different formulations Can be advantageous to treat a spatial grid as a: Levelset Matrix Markov chain Topographic map Relational structure
3. Data Structures for Image Analysis L AK S H M AN @ O U. E D U Different formulations Can be advantageous to treat a spatial grid as a: Levelset Matrix Markov chain Topographic map Relational structure
Example 2: Straight Lines. Image Segmentation. Example 3: Lines and Circular Arcs. Example 1: Regions
 Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example : Straight Lines. into
Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example : Straight Lines. into
Operators-Based on Second Derivative double derivative Laplacian operator Laplacian Operator Laplacian Of Gaussian (LOG) Operator LOG
 Operator LOG") Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
University of Florida CISE department Gator Engineering. Clustering Part 4
 Clustering Part 4 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville DBSCAN DBSCAN is a density based clustering algorithm Density = number of
Clustering Part 4 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville DBSCAN DBSCAN is a density based clustering algorithm Density = number of
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Image segmentation. Stefano Ferrari. Università degli Studi di Milano Methods for Image Processing. academic year
 Image segmentation Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2017 2018 Segmentation by thresholding Thresholding is the simplest
Image segmentation Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2017 2018 Segmentation by thresholding Thresholding is the simplest
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Content-based Image and Video Retrieval. Image Segmentation
 Content-based Image and Video Retrieval Vorlesung, SS 2011 Image Segmentation 2.5.2011 / 9.5.2011 Image Segmentation One of the key problem in computer vision Identification of homogenous region in the
Content-based Image and Video Retrieval Vorlesung, SS 2011 Image Segmentation 2.5.2011 / 9.5.2011 Image Segmentation One of the key problem in computer vision Identification of homogenous region in the
Clustering CS 550: Machine Learning
 Clustering CS 550: Machine Learning This slide set mainly uses the slides given in the following links: http://www-users.cs.umn.edu/~kumar/dmbook/ch8.pdf http://www-users.cs.umn.edu/~kumar/dmbook/dmslides/chap8_basic_cluster_analysis.pdf
Clustering CS 550: Machine Learning This slide set mainly uses the slides given in the following links: http://www-users.cs.umn.edu/~kumar/dmbook/ch8.pdf http://www-users.cs.umn.edu/~kumar/dmbook/dmslides/chap8_basic_cluster_analysis.pdf
Clustering Part 4 DBSCAN
 Clustering Part 4 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville DBSCAN DBSCAN is a density based clustering algorithm Density = number of
Clustering Part 4 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville DBSCAN DBSCAN is a density based clustering algorithm Density = number of
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Image Segmentation. GV12/3072 Image Processing.
 Image Segmentation 1 Recap from last time Samples not squares Sensors are not perfect Quantization hurts Questions? 2 Overview What is image segmentation? Thresholding and thresholding algorithms Performance
Image Segmentation 1 Recap from last time Samples not squares Sensors are not perfect Quantization hurts Questions? 2 Overview What is image segmentation? Thresholding and thresholding algorithms Performance
6.801/866. Segmentation and Line Fitting. T. Darrell
 6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
Lesson 3. Prof. Enza Messina
 Lesson 3 Prof. Enza Messina Clustering techniques are generally classified into these classes: PARTITIONING ALGORITHMS Directly divides data points into some prespecified number of clusters without a hierarchical
Lesson 3 Prof. Enza Messina Clustering techniques are generally classified into these classes: PARTITIONING ALGORITHMS Directly divides data points into some prespecified number of clusters without a hierarchical
A Survey on Image Segmentation Using Clustering Techniques
 A Survey on Image Segmentation Using Clustering Techniques Preeti 1, Assistant Professor Kompal Ahuja 2 1,2 DCRUST, Murthal, Haryana (INDIA) Abstract: Image is information which has to be processed effectively.
A Survey on Image Segmentation Using Clustering Techniques Preeti 1, Assistant Professor Kompal Ahuja 2 1,2 DCRUST, Murthal, Haryana (INDIA) Abstract: Image is information which has to be processed effectively.
Variational Methods II
 Mathematical Foundations of Computer Graphics and Vision Variational Methods II Luca Ballan Institute of Visual Computing Last Lecture If we have a topological vector space with an inner product and functionals
Mathematical Foundations of Computer Graphics and Vision Variational Methods II Luca Ballan Institute of Visual Computing Last Lecture If we have a topological vector space with an inner product and functionals
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Segmentation
 Lecture 6: Segmentation 24--4 Robin Strand Centre for Image Analysis Dept. of IT Uppsala University Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
Lecture 6: Segmentation 24--4 Robin Strand Centre for Image Analysis Dept. of IT Uppsala University Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
Bioimage Informatics
 Bioimage Informatics Lecture 14, Spring 2012 Bioimage Data Analysis (IV) Image Segmentation (part 3) Lecture 14 March 07, 2012 1 Outline Review: intensity thresholding based image segmentation Morphological
Bioimage Informatics Lecture 14, Spring 2012 Bioimage Data Analysis (IV) Image Segmentation (part 3) Lecture 14 March 07, 2012 1 Outline Review: intensity thresholding based image segmentation Morphological
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
identified and grouped together.
 Segmentation ti of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is
Segmentation ti of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is
Segmentation and low-level grouping.
 Segmentation and low-level grouping. Bill Freeman, MIT 6.869 April 14, 2005 Readings: Mean shift paper and background segmentation paper. Mean shift IEEE PAMI paper by Comanici and Meer, http://www.caip.rutgers.edu/~comanici/papers/msrobustapproach.pdf
Segmentation and low-level grouping. Bill Freeman, MIT 6.869 April 14, 2005 Readings: Mean shift paper and background segmentation paper. Mean shift IEEE PAMI paper by Comanici and Meer, http://www.caip.rutgers.edu/~comanici/papers/msrobustapproach.pdf
Shape Contexts. Newton Petersen 4/25/2008
 Shape Contexts Newton Petersen 4/25/28 "Shape Matching and Object Recognition Using Shape Contexts", Belongie et al. PAMI April 22 Agenda Study Matlab code for computing shape context Look at limitations
Shape Contexts Newton Petersen 4/25/28 "Shape Matching and Object Recognition Using Shape Contexts", Belongie et al. PAMI April 22 Agenda Study Matlab code for computing shape context Look at limitations
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Lecture: Segmentation I FMAN30: Medical Image Analysis. Anders Heyden
 Lecture: Segmentation I FMAN30: Medical Image Analysis Anders Heyden 2017-11-13 Content What is segmentation? Motivation Segmentation methods Contour-based Voxel/pixel-based Discussion What is segmentation?
Lecture: Segmentation I FMAN30: Medical Image Analysis Anders Heyden 2017-11-13 Content What is segmentation? Motivation Segmentation methods Contour-based Voxel/pixel-based Discussion What is segmentation?
Segmentation
 Lecture 6: Segmentation 215-13-11 Filip Malmberg Centre for Image Analysis Uppsala University 2 Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
Lecture 6: Segmentation 215-13-11 Filip Malmberg Centre for Image Analysis Uppsala University 2 Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
University of Florida CISE department Gator Engineering. Clustering Part 2
 Clustering Part 2 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville Partitional Clustering Original Points A Partitional Clustering Hierarchical
Clustering Part 2 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville Partitional Clustering Original Points A Partitional Clustering Hierarchical
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Computer Vision Grouping and Segmentation. Grouping and Segmentation
 Computer Vision Grouping and Segmentation Professor Hager http://www.cs.jhu.edu/~hager Grouping and Segmentation G&S appear to be one of the early processes in human vision They are a way of *organizing*
Computer Vision Grouping and Segmentation Professor Hager http://www.cs.jhu.edu/~hager Grouping and Segmentation G&S appear to be one of the early processes in human vision They are a way of *organizing*
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Clustering in Data Mining
 Clustering in Data Mining Classification Vs Clustering When the distribution is based on a single parameter and that parameter is known for each object, it is called classification. E.g. Children, young,
Clustering in Data Mining Classification Vs Clustering When the distribution is based on a single parameter and that parameter is known for each object, it is called classification. E.g. Children, young,
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Image Segmentation Some material for these slides comes from https://www.csd.uwo.ca/courses/cs4487a/
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Image Segmentation Some material for these slides comes from https://www.csd.uwo.ca/courses/cs4487a/
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Computer Vision. Image Segmentation. 10. Segmentation. Computer Engineering, Sejong University. Dongil Han
 Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
CS6716 Pattern Recognition
 CS6716 Pattern Recognition Prototype Methods Aaron Bobick School of Interactive Computing Administrivia Problem 2b was extended to March 25. Done? PS3 will be out this real soon (tonight) due April 10.
CS6716 Pattern Recognition Prototype Methods Aaron Bobick School of Interactive Computing Administrivia Problem 2b was extended to March 25. Done? PS3 will be out this real soon (tonight) due April 10.
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Edge detection. Stefano Ferrari. Università degli Studi di Milano Elaborazione delle immagini (Image processing I)
") Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Image Processing
 Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Integrating Intensity and Texture in Markov Random Fields Segmentation. Amer Dawoud and Anton Netchaev. {amer.dawoud*,
 Integrating Intensity and Texture in Markov Random Fields Segmentation Amer Dawoud and Anton Netchaev {amer.dawoud*, anton.netchaev}@usm.edu School of Computing, University of Southern Mississippi 118
Integrating Intensity and Texture in Markov Random Fields Segmentation Amer Dawoud and Anton Netchaev {amer.dawoud*, anton.netchaev}@usm.edu School of Computing, University of Southern Mississippi 118
Unsupervised Learning
 Outline Unsupervised Learning Basic concepts K-means algorithm Representation of clusters Hierarchical clustering Distance functions Which clustering algorithm to use? NN Supervised learning vs. unsupervised
Outline Unsupervised Learning Basic concepts K-means algorithm Representation of clusters Hierarchical clustering Distance functions Which clustering algorithm to use? NN Supervised learning vs. unsupervised
Region & edge based Segmentation
 INF 4300 Digital Image Analysis Region & edge based Segmentation Fritz Albregtsen 06.11.2018 F11 06.11.18 IN5520 1 Today We go through sections 10.1, 10.4, 10.5, 10.6.1 We cover the following segmentation
INF 4300 Digital Image Analysis Region & edge based Segmentation Fritz Albregtsen 06.11.2018 F11 06.11.18 IN5520 1 Today We go through sections 10.1, 10.4, 10.5, 10.6.1 We cover the following segmentation
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Structural Analysis of Aerial Photographs (HB47 Computer Vision: Assignment)
") Structural Analysis of Aerial Photographs (HB47 Computer Vision: Assignment) Xiaodong Lu, Jin Yu, Yajie Li Master in Artificial Intelligence May 2004 Table of Contents 1 Introduction... 1 2 Edge-Preserving
Structural Analysis of Aerial Photographs (HB47 Computer Vision: Assignment) Xiaodong Lu, Jin Yu, Yajie Li Master in Artificial Intelligence May 2004 Table of Contents 1 Introduction... 1 2 Edge-Preserving
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Image Analysis Image Segmentation (Basic Methods)
") Image Analysis Image Segmentation (Basic Methods) Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Computer Vision course
Image Analysis Image Segmentation (Basic Methods) Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Computer Vision course
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Image Segmentation. Ross Whitaker SCI Institute, School of Computing University of Utah
 Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
Optimal Grouping of Line Segments into Convex Sets 1
 Optimal Grouping of Line Segments into Convex Sets 1 B. Parvin and S. Viswanathan Imaging and Distributed Computing Group Information and Computing Sciences Division Lawrence Berkeley National Laboratory,
Optimal Grouping of Line Segments into Convex Sets 1 B. Parvin and S. Viswanathan Imaging and Distributed Computing Group Information and Computing Sciences Division Lawrence Berkeley National Laboratory,
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
CS 490: Computer Vision Image Segmentation: Thresholding. Fall 2015 Dr. Michael J. Reale
 CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
CS 664 Slides #11 Image Segmentation. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #11 Image Segmentation Prof. Dan Huttenlocher Fall 2003 Image Segmentation Find regions of image that are coherent Dual of edge detection Regions vs. boundaries Related to clustering problems
CS 664 Slides #11 Image Segmentation Prof. Dan Huttenlocher Fall 2003 Image Segmentation Find regions of image that are coherent Dual of edge detection Regions vs. boundaries Related to clustering problems
[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16
![[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16](/thumbs/89/98496315.jpg "[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16") Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Massachusetts Institute of Technology. Department of Computer Science and Electrical Engineering /6.866 Machine Vision Quiz I
 Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision Quiz I Handed out: 2004 Oct. 21st Due on: 2003 Oct. 28th Problem 1: Uniform reflecting
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision Quiz I Handed out: 2004 Oct. 21st Due on: 2003 Oct. 28th Problem 1: Uniform reflecting
A Object Retrieval Based on Fuzzy Flood Fill Method
 Volume 1, Issue 3, October 2013 ISSN: 2320-9984 (Online) International Journal of Modern Engineering & Management Research Aditya Patel Department of Computer Science and Engineering GEC, (M.P.) [INDIA]
Volume 1, Issue 3, October 2013 ISSN: 2320-9984 (Online) International Journal of Modern Engineering & Management Research Aditya Patel Department of Computer Science and Engineering GEC, (M.P.) [INDIA]
Digital Image Analysis and Processing
 Digital Image Analysis and Processing CPE 0907544 Image Segmentation Part II Chapter 10 Sections : 10.3 10.4 Dr. Iyad Jafar Outline Introduction Thresholdingh Fundamentals Basic Global Thresholding Optimal
Digital Image Analysis and Processing CPE 0907544 Image Segmentation Part II Chapter 10 Sections : 10.3 10.4 Dr. Iyad Jafar Outline Introduction Thresholdingh Fundamentals Basic Global Thresholding Optimal
Application of fuzzy set theory in image analysis. Nataša Sladoje Centre for Image Analysis
 Application of fuzzy set theory in image analysis Nataša Sladoje Centre for Image Analysis Our topics for today Crisp vs fuzzy Fuzzy sets and fuzzy membership functions Fuzzy set operators Approximate
Application of fuzzy set theory in image analysis Nataša Sladoje Centre for Image Analysis Our topics for today Crisp vs fuzzy Fuzzy sets and fuzzy membership functions Fuzzy set operators Approximate
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
Object-Based Classification & ecognition. Zutao Ouyang 11/17/2015
 Object-Based Classification & ecognition Zutao Ouyang 11/17/2015 What is Object-Based Classification The object based image analysis approach delineates segments of homogeneous image areas (i.e., objects)
Object-Based Classification & ecognition Zutao Ouyang 11/17/2015 What is Object-Based Classification The object based image analysis approach delineates segments of homogeneous image areas (i.e., objects)
Classification. Vladimir Curic. Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University
 Classification Vladimir Curic Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University Outline An overview on classification Basics of classification How to choose appropriate
Classification Vladimir Curic Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University Outline An overview on classification Basics of classification How to choose appropriate
Figure (5) Kohonen Self-Organized Map
 Kohonen Self-Organized Map") 2- KOHONEN SELF-ORGANIZING MAPS (SOM) - The self-organizing neural networks assume a topological structure among the cluster units. - There are m cluster units, arranged in a one- or two-dimensional array;
2- KOHONEN SELF-ORGANIZING MAPS (SOM) - The self-organizing neural networks assume a topological structure among the cluster units. - There are m cluster units, arranged in a one- or two-dimensional array;
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Today INF How did Andy Warhol get his inspiration? Edge linking (very briefly) Segmentation approaches
 Segmentation approaches") INF 4300 14.10.09 Image segmentation How did Andy Warhol get his inspiration? Sections 10.11 Edge linking 10.2.7 (very briefly) 10.4 10.5 10.6.1 Anne S. Solberg Today Segmentation approaches 1. Region
INF 4300 14.10.09 Image segmentation How did Andy Warhol get his inspiration? Sections 10.11 Edge linking 10.2.7 (very briefly) 10.4 10.5 10.6.1 Anne S. Solberg Today Segmentation approaches 1. Region
Previously. Edge detection. Today. Thresholding. Gradients -> edges 2/1/2011. Edges and Binary Image Analysis
 2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives