Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
|
|
|
- Beatrice Hall
- 6 years ago
- Views:
Transcription





1 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments
2 Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features Identifying and Verifying Components 2
3 Class Goals Teach the fundamental image processing tools available in machine vision software Provide some background into how the algorithms work Accelerate your machine vision learning curve What not to expect Learn how to develop a complete vision system Learn specific, proprietary functions 3D vision, color or other advanced topics Discussion of the benefits of different application development environments 3
4 Image Processing for Machine Vision Objective To extract useful information present in an image, in a limited time Secondary To display an image for users Not Improve appearance of image in general Used for Image pre-processing Minimize variations of information in the image Prepare the image for processing and measurement Application specific processing Use image to count, locate, and measure attributes 4
 Other types Binary: pixel values: 0 and")

5 Image Types Grayscale 8-bit: pixel values range from 0 to bit: pixel values range from 0 to Color Composed of 3 grayscale images (RGB) Other types Binary: pixel values: 0 and 1 Commonly used to identify objects of interest in an image Usually the result of image processing step Floating point Usually a result of a computation Complex Grayscale Image Binary Image 5
6 What is an Ideal Image? Range of grayscale values Spread out between 0 and 255 No pixels saturated at 255 (for most applications) Loss of information, impossible to distinguish between saturated pixels Good contrast Between the parts of the image of interest Repeatable In short, an ideal image requires the least number of image processing steps to obtain the result. 6


")
7 Class Organization Enhance Check Locate Measure Identify Filter noise or unwanted features Remove distortion Calibrate images Measure intensity Create particles Analyze particles Match patterns Match geometry Set-up coordinate systems Detect edges Measure distance Calculate geometry Read text (OCR) Read 1D barcodes Read 2D codes
8 Class Organization Enhance Check Locate Measure Identify Filter noise or unwanted features Remove distortion Calibrate images Measure intensity Create particles Analyze particles Match patterns Match geometry Set-up coordinate systems Detect edges Measure distance Calculate geometry Read text (OCR) Read 1D barcodes Read 2D codes
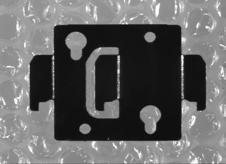
9 Motivation Read characters on a textured surface 9
10 Motivation Not possible to cleanly segment characters 10
11 Motivation Results without preprocessing 11
12 Motivation Read characters on a textured surface 12

13 Motivation Image after periodic pattern is removed 13

14 Motivation 14
15 Motivation Results without preprocessing Results with preprocessing 15
16 Objective of Image Preprocessing Process an image so that the resulting image is more suitable than the original for a specific application A preprocessing method that works well for one application may not be the best method for another application 16


17 Image Preprocessing Pre-processing occurs before the application specific processing Acquisition Preprocessing Application Specific Processing Shading Correction De-blurring De-noising Contrast Enhancement Feature Enhancement Intensity Measurements OCR Pattern Matching Gauging Barcode Particle Analysis 17
18 Enhancement Techniques Spatial Domain: pixel-wise operations Brightness, contrast and gamma Lookup tables Gray morphology Filtering (smoothing, median, general convolution) Frequency Domain Deblurring Filtering 18

19 Brightness Adds a constant grayscale to all of the image Can improve appearance but not useful for most image processing steps 19
20 Contrast Used to increase or decrease contrast Normal = 45 (degree line) High = Higher than 45 Low = Lower than 45 Typical use is to improve edge detection Sacrifices one range of values to improve another 20

21 Gamma Nonlinear contrast enhancement Higher gamma improves contrast for larger grayscale values Does not cause saturation 21

22 Lookup Tables A lookup table is a function that maps grayscale values in an image to new grayscale values, to create a new result image For example: reverse, square, power Reverse Square Power (x=1.5) 22






23 Histogram Indicates the number of pixels at each gray level Provides a good description of the composition of an image Helps to identify various populations # Pixels Pixel values 23 Saturation

24 Histogram Equalization Alters grayscale values of pixels so that they become evenly distributed across the full grayscale range The function associates an equal number of pixels per constant grayscale interval Takes full advantage of the available shades of gray Enhances contrast of the image without modifying the structure Original Image 24 Equalized


25 Histogram Equalization Cumulative Histogram Bright Dark Low Contrast High Contrast 25





26 Spatial Filtering Filter Type Filters Linear Highpass Gradient, Laplacian Gradient Linear Lowpass Smoothing, Gaussian Gaussian Nonlinear Highpass Gradient, Roberts Sobel, Prewitt, Differentiation, Sigma Sobel Nonlinear Lowpass Median, Nth Order Median 26
 Dilation Open Dilation(Erosion(I)) Open Close Erosion(Dilation(I))")
27 Gray Morphology Morphology Function Erosion Min(Neighbors) Erosion Dilation Max(Neighbors) Dilation Open Dilation(Erosion(I)) Open Close Erosion(Dilation(I)) Close 27
 IFFT I(x,y) F(u,v)")
28 Frequency Domain Filtering Standard filtering can be done in frequency domain Low Pass, High Pass, Band Pass, Band Stop, etc. Compute the Fourier transform of the image Multiply with the transfer function of the filter Take the inverse Fourier transform to get the filtered image Input Image FFT H(u,v) IFFT I(x,y) F(u,v) F(u,v).H(u,v) R(x,y) Output Image Periodic noise 28 Bandstop filtered



29 Low Pass Filter Examples Low Pass with Frequency Domain Filter Low Pass with Gaussian Filter 29


30 High Pass Filtering Examples Detect edges Sharpen image 30
31 ENHANCE IMAGES: IMAGE CALIBRATION
32 Types of Calibration 2D spatial calibration Applied only to a plane Corrects for lens and perspective distortion Does not improve resolution of a measurement Cannot compensate for poor lighting or unstable conditions 3D spatial calibration: x, y, z Intensity calibration Color 32
33 Spatial Calibration Corrects for lens and perspective distortion Allows the user to take real-world measurements from image based on pixel locations. lens distortion perspective known orientation offset 33


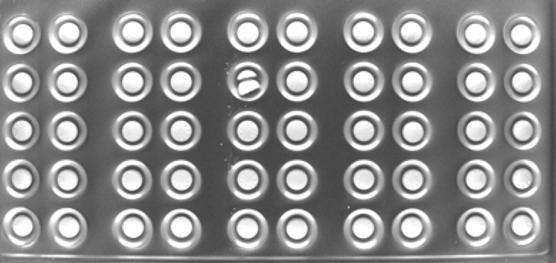
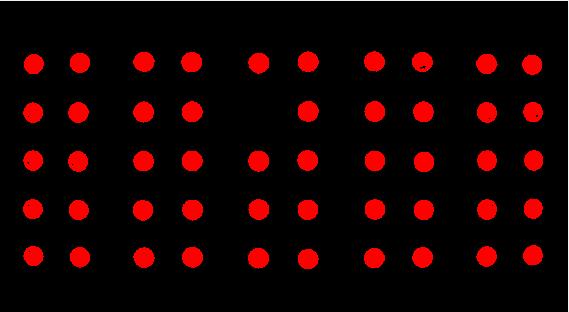
34 Calibrating Your Image Setup Acquire image of a calibration grid with known realworld distances between the dots Learn the calibration (mapping information) from its perspective and distortion Apply this mapping information to subsequent images and measurements 34

35 Image Spatial Calibration Example Acquired image Calibrated measurements Calibration grid 35



36 Image Correction Use calibration to adjust image geometry so features are represented properly. Acquired image Calibration grid 36 Corrected Images
37 Class Organization Enhance Check Locate Measure Identify Filter noise or unwanted features Remove distortion Calibrate images Measure intensity Create particles Analyze particles Match patterns Match geometry Set-up coordinate systems Detect edges Measure distance Calculate geometry Read text (OCR) Read 1D barcodes Read 2D codes

 or dynamically (based on features located in")

38 Region of Interest (ROI) Region of Interest (ROI) A portion of the image upon which an image processing step may be performed Can be defined statically (fixed) or dynamically (based on features located in the image) Used to process only pixels that are interesting Increases reliability Reduces processing time 38


 can be")

39 Measure Intensity Intensity statistics of Region of Interest (Search Area) can be used as a very simple check for presence/absence 39
40 Thresholding Thresholding Converts each pixel value in an image to 0 or 1 according to the value of the original pixel Helps extract significant structures in an image 40

41 Histogram and Thresholding Original Image Histogram of Image Binary Image Threshold Range 41
 are set to 1, and those outside the limit are set to")
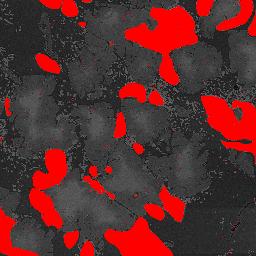
42 Finding Gray Objects Can also set upper and lower limits for pixel values Pixels inside the bounds of the limit (red region) are set to 1, and those outside the limit are set to 0 42
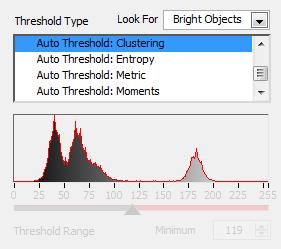
43 Automatic Thresholding 43


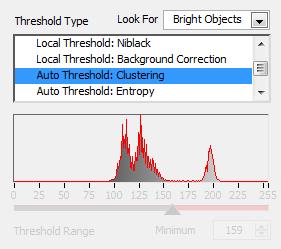
44 Global vs. Local Threshold Global Threshold 44 Local Threshold
45 Particles and Connectivity Thresholding creates binary image: Pixels are either 0 or 1 A particle in a binary image is a group of connected 1 pixels Defining connectivity 45
46 How Connectivity Affects a Particle Connectivity-4: two pixels are considered part of the same particle if they are horizontally or vertically adjacent Connectivity-8: two pixels are considered part of the same particle if they are horizontally, vertically, or diagonally adjacent


47 Particle measurements Measures particle features including: location, orientation, area, perimeter, holes, shape equivalences, moments 47
48 Binary Morphology Binary morphological functions extract and alter the structure of particles in a binary image Morphological functions remove unwanted information caused by the thresholding process: Noise particles Removing holes within particles Particles touching the border of an image Particles touching each other Particles with uneven borders 48
49 Erosion Decreases the size of objects in an image Removes a layer of pixels along the boundary of the particle Eliminates small isolated particles in the background and removes narrow peninsulas Use Erode to: Separate particles for counting Erosion 49
50 Dilation Increases the size of objects in an image Adds a layer of pixels around the boundary of an object (including the inside boundary for objects with holes) Eliminates tiny holes in objects Removes gaps or bays of insufficient width Use Dilate to connect particles Dilation 50
51 Erosion vs. Dilation Erosion Dilation 51
52 Open An erosion followed by a dilation Remove small particles and smooth boundaries Does not significantly alter the size or shape of particles Borders removed by the erosion process are replaced by the dilation process Use Open To: Eliminate small particles that constitute noise Open 52
53 Close A dilation followed by an erosion Fills holes and creates smooth boundaries Does not significantly alter the size or shape of particles Particles that do not connect after the dilation are not changed Use Close To: Eliminate small holes that constitute noise Close 53
54 Advanced Morphology Advanced morphological functions are combinations of operations, each of which is responsible for a single operation These functions execute the following tasks: Remove small or large particles Remove particles from an image border Fill holes Separate particles Keep or remove particles identified by morphological parameters Segmenting the image 54


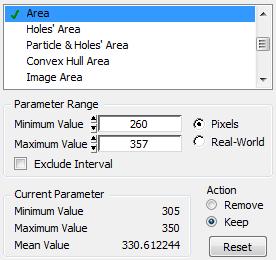
55 Particle Filtering Keeps or removes particles based on geometric features Area, width, height, aspect ratio and other features are commonly used to filter Typically used on binary images Cleans up noisy images Threshold 55 Particle Filter (Keep Heywood Circularity Factor < 1.1)
56 Application: Particle counting Original Threshold Particle Filter
57 Class Organization Enhance Check Locate Measure Identify Filter noise or unwanted features Remove distortion Calibrate images Measure intensity Create particles Analyze particles Match patterns Match geometry Set-up coordinate systems Detect edges Measure distance Calculate geometry Read text (OCR) Read 1D barcodes Read 2D codes
58 LOCATING PARTS: PATTERN MATCHING




59 Introduction to Matching Locates regions of a grayscale image that match a predefined template Calculate a score for each matching region Score indicates quality of match Returns the XY coordinates, rotation angle and scale for each match 59

60 Applications Presence Detection Counting Locating Inspection 60
61 How It Works Two step process: Step 1: Learn Template Extract information useful for uniquely characterizing the pattern Organize information to facilitate faster search of the pattern in the image Step 2: Match Use the information present in the template to locate regions in the target image Emphasis is on search methods that quickly and accurately locate matched regions 61
62 Pattern Matching Methods Different ways to perform pattern matching based on the information extracted from the template Two common methods: Correlation Pattern Matching Relies on the grayscale information in the image for matching Geometric Pattern Matching Relies on edges and geometric features in the image for matching 62

63 Correlation Pattern Matching Assumes grayscale information present in the image Directly uses the underlying grayscale information in the image for matching Grayscale values in the pattern are matched to regions in the image using normalized crosscorrelation Score ranges from Used to allow imperfect match. Template (Pattern) 63

64 Correlation Pattern Matching When to use: Template primarily characterized by grayscale information Matching under uniform light changes Little occlusion and scale changes in image Good for the general case Good template Bad template 64






65 Correlation Pattern Matching When NOT to use correlation-based pattern matching: Non-uniform lighting Occlusion more than 10% Scale changes 65



66 Geometric Pattern Matching Matching tool you can use to locate parts that contain distinct edge information Not useful when template is predominantly defined by texture. 66




67 GPM is Tolerant to Occlusion Scale Changes Non-uniform Lighting Background Changes 67


68 GPM Feature-based Target Image Image Template Extract Curves Extract Features Match Features circles parallel lines 68
69 Feature Comparison Feature CPM GPM Template contains texture-like information Yes Template contains geometric information Yes Yes Find multiple match locations Yes Yes Rotation Yes Yes Scale Occlusion Matching under non-uniform lighting Yes Yes Yes Sub-pixel match locations Yes Yes 69
70 LOCATING PARTS: COORDINATE SYSTEMS


71 Region of Interest (ROI) Region of Interest (ROI) a.k.a. Search Area A portion of the image upon which an image processing step may be performed. The object under inspection must always appear inside the defined ROI in order to extract measurements from that ROI. ROIs need to be repositioned when the location of the part varies 71


72 Coordinate Systems Defined by a reference point (origin) and angle within the image, or by the lines that make up its axes Allows you to define search areas that can move around the image with the object you are inspecting Usually based on a characteristic feature of the object under inspection Use pattern match, edge detection or geometry tools to locate features Use features to establish coordinate system 72



73 Coordinate Systems Set Up 1) Define an origin Locate an easy-to-find feature in your reference image. Feature must be stable from image to image. Set a coordinate system based on its location and orientation 2) Set up measurement ROIs in reference to the new origin Acquire a new image Locate reference point Reposition measurement ROIs 73
74 Class Organization Enhance Check Locate Measure Identify Filter noise or unwanted features Remove distortion Calibrate images Measure intensity Create particles Analyze particles Match patterns Match geometry Set-up coordinate systems Detect edges Measure distance Calculate geometry Read text (OCR) Read 1D barcodes Read 2D codes



75 Edge Detection Overview Process of detecting transitions in an image One of the most commonly used machine vision tools Attractive because: Simple to understand and use Localized processing fast Applicable to many applications Tolerant to illumination changes Different Edges
 Compute gradient information 3) Find peaks and valleys (edge locations) based on contrast, width,")
 Select edge(s) based on: Order: first, last, first & last Polarity: rising, falling Score: best")
76 1D Edge Detection Detect edge points along a line basic operation: 1) Get pixel values along the line 2) Compute gradient information 3) Find peaks and valleys (edge locations) based on contrast, width, steepness. 4) Select edge(s) based on: Order: first, last, first & last Polarity: rising, falling Score: best edge Gradient Value Pixel Value Position Along Line (pixels) 76 Position Along Line (pixels)
 Subpixel")
77 Subpixel Accuracy Subpixel location of edge can be computed using parabolic interpolation Parabolic interpolation Parabolic Fit Gradient Value Position Along Line (pixels) Subpixel Location 77




78 Edge Detector Tools Several high level edge tools are build on the single edge detectors Rake: Used to find multiple edges and fit a shape through them Configurable search directions, filtering options and sub-sampling ratios. 78



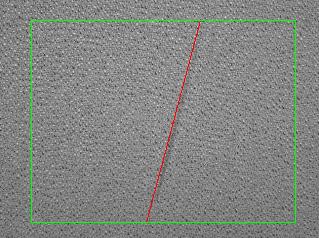
79 Straight Edge (Line) Detection Detect straight lines in an image Extension of 1D edge detection Straight edge detection options: Rake-based Projection-based Hough transform-based Rake-based find straight edge Projection-based find straight edge 79 Locating multiple straight edges


80 Edge Detection Applications Detect Features Alignment Gauging Inspection 80




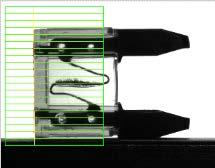
81 Application: Inspecting Parts Locating part using find straight edge Check for remnant plastic using intensity measurement Check liquid level using find straight edge 81 Check tips using pattern matching 81

82 Application: Dimension Verification Dimensional measurements, such as lengths, distance, and diameter Inline gauging inspections are used to verify assembly and packaging routines Offline gauging is used to judge product quality according to a sample 82
83 Class Organization Enhance Check Locate Measure Identify Filter noise or unwanted features Remove distortion Calibrate images Measure intensity Create particles Analyze particles Match patterns Match geometry Set-up coordinate systems Detect edges Measure distance Calculate geometry Read text (OCR) Read 1D barcodes Read 2D codes

84 Identify 1D and 2D Codes Marking methods Reading Examples 84
85 1D Codes Applications using 1D bar codes have been around for over 35 years Barcode data is an index into a large central data storage Code is easily read by laser scanners Low data capacity in large footprint Code 3 of 9 Code 128 EAN 13 85


86 2D Codes Usually not an index into a database Camera-based vision systems are preferred reading method High data capacity in small footprint PDF 417 Data Matrix QR Code 86


87 1D vs. 2D 1D Codes Low data capacity Index into large database Large footprint Redundancy in Y dimension Readable by laser scanner Requires as much as 80% contrast 2D Codes High data capacity Self contained data Small footprint Error correction capability Requires camera based reader Can be read in low contrast 87




88 Optical Character Recognition (OCR) 88
89 OCR/OCV OCR/OCV: Optical Character Recognition/Verification: Reads or verifies (printed) characters Typical steps: Region of Interest around lines of text Threshold Character Segmentation Compare to Library (classification) Character is learned or recognized Optical Character Verification (OCV): Compare character recognized against golden reference 89
90 Class Organization Enhance Check Locate Measure Identify Filter noise or unwanted features Remove distortion Calibrate images Measure intensity Create particles Analyze particles Match patterns Match geometry Set-up coordinate systems Detect edges Measure distance Calculate geometry Read text (OCR) Read 1D barcodes Read 2D codes

91 Contact Information Nicolas Vazquez Principal Software Engineer National Instruments N. Mopac Expwy Austin, Texas USA Phone:
Vivekananda. Collegee of Engineering & Technology. Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT.
 Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Advanced Vision System Integration. David Dechow Staff Engineer, Intelligent Robotics/Machine Vision FANUC America Corporation
 Advanced Vision System Integration David Dechow Staff Engineer, Intelligent Robotics/Machine Vision FANUC America Corporation Advanced Vision System Integration INTRODUCTION AND REVIEW Introduction and
Advanced Vision System Integration David Dechow Staff Engineer, Intelligent Robotics/Machine Vision FANUC America Corporation Advanced Vision System Integration INTRODUCTION AND REVIEW Introduction and
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Image Processing: Final Exam November 10, :30 10:30
 Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
Image Processing: Final Exam November 10, 2017-8:30 10:30 Student name: Student number: Put your name and student number on all of the papers you hand in (if you take out the staple). There are always
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
SECTION 5 IMAGE PROCESSING 2
 SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN
 CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Schedule for Rest of Semester
 Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
Vision. OCR and OCV Application Guide OCR and OCV Application Guide 1/14
 Vision OCR and OCV Application Guide 1.00 OCR and OCV Application Guide 1/14 General considerations on OCR Encoded information into text and codes can be automatically extracted through a 2D imager device.
Vision OCR and OCV Application Guide 1.00 OCR and OCV Application Guide 1/14 General considerations on OCR Encoded information into text and codes can be automatically extracted through a 2D imager device.
Counting Particles or Cells Using IMAQ Vision
 Application Note 107 Counting Particles or Cells Using IMAQ Vision John Hanks Introduction To count objects, you use a common image processing technique called particle analysis, often referred to as blob
Application Note 107 Counting Particles or Cells Using IMAQ Vision John Hanks Introduction To count objects, you use a common image processing technique called particle analysis, often referred to as blob
Using Edge Detection in Machine Vision Gauging Applications
 Application Note 125 Using Edge Detection in Machine Vision Gauging Applications John Hanks Introduction This application note introduces common edge-detection software strategies for applications such
Application Note 125 Using Edge Detection in Machine Vision Gauging Applications John Hanks Introduction This application note introduces common edge-detection software strategies for applications such
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
IRIS SEGMENTATION OF NON-IDEAL IMAGES
 IRIS SEGMENTATION OF NON-IDEAL IMAGES William S. Weld St. Lawrence University Computer Science Department Canton, NY 13617 Xiaojun Qi, Ph.D Utah State University Computer Science Department Logan, UT 84322
IRIS SEGMENTATION OF NON-IDEAL IMAGES William S. Weld St. Lawrence University Computer Science Department Canton, NY 13617 Xiaojun Qi, Ph.D Utah State University Computer Science Department Logan, UT 84322
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
EEM 463 Introduction to Image Processing. Week 3: Intensity Transformations
 EEM 463 Introduction to Image Processing Week 3: Intensity Transformations Fall 2013 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Enhancement Domains Spatial
EEM 463 Introduction to Image Processing Week 3: Intensity Transformations Fall 2013 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Enhancement Domains Spatial
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 6 Sept 6 th, 2017 Pranav Mantini Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Today Review Logical Operations on Binary Images Blob Coloring
Digital Image Processing COSC 6380/4393 Lecture 6 Sept 6 th, 2017 Pranav Mantini Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Today Review Logical Operations on Binary Images Blob Coloring
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Noise Model. Important Noise Probability Density Functions (Cont.) Important Noise Probability Density Functions
 Important Noise Probability Density Functions") Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Digital Image Processing. Prof. P. K. Biswas. Department of Electronic & Electrical Communication Engineering
 Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Laboratory of Applied Robotics
 Laboratory of Applied Robotics OpenCV: Shape Detection Paolo Bevilacqua RGB (Red-Green-Blue): Color Spaces RGB and HSV Color defined in relation to primary colors Correlated channels, information on both
Laboratory of Applied Robotics OpenCV: Shape Detection Paolo Bevilacqua RGB (Red-Green-Blue): Color Spaces RGB and HSV Color defined in relation to primary colors Correlated channels, information on both
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Classification of image operations. Image enhancement (GW-Ch. 3) Point operations. Neighbourhood operation
 Point operations. Neighbourhood operation") Image enhancement (GW-Ch. 3) Classification of image operations Process of improving image quality so that the result is more suitable for a specific application. contrast stretching histogram processing
Image enhancement (GW-Ch. 3) Classification of image operations Process of improving image quality so that the result is more suitable for a specific application. contrast stretching histogram processing
CHAPTER 6 DETECTION OF MASS USING NOVEL SEGMENTATION, GLCM AND NEURAL NETWORKS
 130 CHAPTER 6 DETECTION OF MASS USING NOVEL SEGMENTATION, GLCM AND NEURAL NETWORKS A mass is defined as a space-occupying lesion seen in more than one projection and it is described by its shapes and margin
130 CHAPTER 6 DETECTION OF MASS USING NOVEL SEGMENTATION, GLCM AND NEURAL NETWORKS A mass is defined as a space-occupying lesion seen in more than one projection and it is described by its shapes and margin
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
2: Image Display and Digital Images. EE547 Computer Vision: Lecture Slides. 2: Digital Images. 1. Introduction: EE547 Computer Vision
 EE547 Computer Vision: Lecture Slides Anthony P. Reeves November 24, 1998 Lecture 2: Image Display and Digital Images 2: Image Display and Digital Images Image Display: - True Color, Grey, Pseudo Color,
EE547 Computer Vision: Lecture Slides Anthony P. Reeves November 24, 1998 Lecture 2: Image Display and Digital Images 2: Image Display and Digital Images Image Display: - True Color, Grey, Pseudo Color,
Image Processing. Bilkent University. CS554 Computer Vision Pinar Duygulu
 Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
OCR and OCV. Tom Brennan Artemis Vision Artemis Vision 781 Vallejo St Denver, CO (303)
") OCR and OCV Tom Brennan Artemis Vision Artemis Vision 781 Vallejo St Denver, CO 80204 (303)832-1111 tbrennan@artemisvision.com www.artemisvision.com About Us Machine Vision Integrator Turnkey Systems OEM
OCR and OCV Tom Brennan Artemis Vision Artemis Vision 781 Vallejo St Denver, CO 80204 (303)832-1111 tbrennan@artemisvision.com www.artemisvision.com About Us Machine Vision Integrator Turnkey Systems OEM
Introducing Robotics Vision System to a Manufacturing Robotics Course
 Paper ID #16241 Introducing Robotics Vision System to a Manufacturing Robotics Course Dr. Yuqiu You, Ohio University c American Society for Engineering Education, 2016 Introducing Robotics Vision System
Paper ID #16241 Introducing Robotics Vision System to a Manufacturing Robotics Course Dr. Yuqiu You, Ohio University c American Society for Engineering Education, 2016 Introducing Robotics Vision System
The. Handbook ijthbdition. John C. Russ. North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina
 The IMAGE PROCESSING Handbook ijthbdition John C. Russ North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina (cp ) Taylor &. Francis \V J Taylor SiFrancis
The IMAGE PROCESSING Handbook ijthbdition John C. Russ North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina (cp ) Taylor &. Francis \V J Taylor SiFrancis
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010
 An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
Object Shape Recognition in Image for Machine Vision Application
 Object Shape Recognition in Image for Machine Vision Application Mohd Firdaus Zakaria, Hoo Seng Choon, and Shahrel Azmin Suandi Abstract Vision is the most advanced of our senses, so it is not surprising
Object Shape Recognition in Image for Machine Vision Application Mohd Firdaus Zakaria, Hoo Seng Choon, and Shahrel Azmin Suandi Abstract Vision is the most advanced of our senses, so it is not surprising
EECS490: Digital Image Processing. Lecture #19
 Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
VisionGauge OnLine Spec Sheet
 VisionGauge OnLine Spec Sheet VISIONx INC. www.visionxinc.com Powerful & Easy to Use Intuitive Interface VisionGauge OnLine is a powerful and easy-to-use machine vision software for automated in-process
VisionGauge OnLine Spec Sheet VISIONx INC. www.visionxinc.com Powerful & Easy to Use Intuitive Interface VisionGauge OnLine is a powerful and easy-to-use machine vision software for automated in-process
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
Processing of binary images
 Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Digital Image Processing, 2nd ed. Digital Image Processing, 2nd ed. The principal objective of enhancement
 Chapter 3 Image Enhancement in the Spatial Domain The principal objective of enhancement to process an image so that the result is more suitable than the original image for a specific application. Enhancement
Chapter 3 Image Enhancement in the Spatial Domain The principal objective of enhancement to process an image so that the result is more suitable than the original image for a specific application. Enhancement
Ch 22 Inspection Technologies
 Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Carmen Alonso Montes 23rd-27th November 2015
 Practical Computer Vision: Theory & Applications 23rd-27th November 2015 Wrap up Today, we are here 2 Learned concepts Hough Transform Distance mapping Watershed Active contours 3 Contents Wrap up Object
Practical Computer Vision: Theory & Applications 23rd-27th November 2015 Wrap up Today, we are here 2 Learned concepts Hough Transform Distance mapping Watershed Active contours 3 Contents Wrap up Object
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
[10] Industrial DataMatrix barcodes recognition with a random tilt and rotating the camera
![[10] Industrial DataMatrix barcodes recognition with a random tilt and rotating the camera](/thumbs/84/90637441.jpg "[10] Industrial DataMatrix barcodes recognition with a random tilt and rotating the camera") [10] Industrial DataMatrix barcodes recognition with a random tilt and rotating the camera Image processing, pattern recognition 865 Kruchinin A.Yu. Orenburg State University IntBuSoft Ltd Abstract The
[10] Industrial DataMatrix barcodes recognition with a random tilt and rotating the camera Image processing, pattern recognition 865 Kruchinin A.Yu. Orenburg State University IntBuSoft Ltd Abstract The
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Texture. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors
 Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Wafer Defect Detection Using Directional Morphological Gradient Techniques
 EURASIP Journal on Applied Signal Processing 22:7, 686 73 c 22 Hindawi Publishing Corporation Wafer Defect Detection Using Directional Morphological Gradient Techniques Gongyuan Qu Electrical Engineering
EURASIP Journal on Applied Signal Processing 22:7, 686 73 c 22 Hindawi Publishing Corporation Wafer Defect Detection Using Directional Morphological Gradient Techniques Gongyuan Qu Electrical Engineering
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16
![[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16](/thumbs/89/98496315.jpg "[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16") Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Keywords: Thresholding, Morphological operations, Image filtering, Adaptive histogram equalization, Ceramic tile.
 Volume 3, Issue 7, July 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Blobs and Cracks
Volume 3, Issue 7, July 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Blobs and Cracks
Computer Vision. Image Segmentation. 10. Segmentation. Computer Engineering, Sejong University. Dongil Han
 Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Segmentation algorithm for monochrome images generally are based on one of two basic properties of gray level values: discontinuity and similarity.
 Chapter - 3 : IMAGE SEGMENTATION Segmentation subdivides an image into its constituent s parts or objects. The level to which this subdivision is carried depends on the problem being solved. That means
Chapter - 3 : IMAGE SEGMENTATION Segmentation subdivides an image into its constituent s parts or objects. The level to which this subdivision is carried depends on the problem being solved. That means
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Robot vision review. Martin Jagersand
 Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
Detection of Edges Using Mathematical Morphological Operators
 OPEN TRANSACTIONS ON INFORMATION PROCESSING Volume 1, Number 1, MAY 2014 OPEN TRANSACTIONS ON INFORMATION PROCESSING Detection of Edges Using Mathematical Morphological Operators Suman Rani*, Deepti Bansal,
OPEN TRANSACTIONS ON INFORMATION PROCESSING Volume 1, Number 1, MAY 2014 OPEN TRANSACTIONS ON INFORMATION PROCESSING Detection of Edges Using Mathematical Morphological Operators Suman Rani*, Deepti Bansal,
Edges and Binary Image Analysis. Thurs Jan 26 Kristen Grauman UT Austin. Today. Edge detection and matching
 /25/207 Edges and Binary Image Analysis Thurs Jan 26 Kristen Grauman UT Austin Today Edge detection and matching process the image gradient to find curves/contours comparing contours Binary image analysis
/25/207 Edges and Binary Image Analysis Thurs Jan 26 Kristen Grauman UT Austin Today Edge detection and matching process the image gradient to find curves/contours comparing contours Binary image analysis
Credit Card Processing Using Cell Phone Images
 Credit Card Processing Using Cell Phone Images Keshav Datta Department of Electrical Engineering Stanford University Stanford, CA keshavd@stanford.edu Abstract A new method to extract credit card information
Credit Card Processing Using Cell Phone Images Keshav Datta Department of Electrical Engineering Stanford University Stanford, CA keshavd@stanford.edu Abstract A new method to extract credit card information
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Point operation Spatial operation Transform operation Pseudocoloring
 Image Enhancement Introduction Enhancement by point processing Simple intensity transformation Histogram processing Spatial filtering Smoothing filters Sharpening filters Enhancement in the frequency domain
Image Enhancement Introduction Enhancement by point processing Simple intensity transformation Histogram processing Spatial filtering Smoothing filters Sharpening filters Enhancement in the frequency domain
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Image Restoration and Reconstruction
 Image Restoration and Reconstruction Image restoration Objective process to improve an image Recover an image by using a priori knowledge of degradation phenomenon Exemplified by removal of blur by deblurring
Image Restoration and Reconstruction Image restoration Objective process to improve an image Recover an image by using a priori knowledge of degradation phenomenon Exemplified by removal of blur by deblurring
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Previously. Edge detection. Today. Thresholding. Gradients -> edges 2/1/2011. Edges and Binary Image Analysis
 2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
DT Vision Foundry. Now With FDA 21 CFR Part 11 Support, New Color Split Tool, and Many Enhancements!
 DT Vision Foundry OS: Windows 2000/XP DT Vision Foundry 3.7 Rapid Development Software for Inspection Applications Now With FDA 21 CFR Part 11 Support, New Color Split, and Many Enhancements! Rapid Development
DT Vision Foundry OS: Windows 2000/XP DT Vision Foundry 3.7 Rapid Development Software for Inspection Applications Now With FDA 21 CFR Part 11 Support, New Color Split, and Many Enhancements! Rapid Development
CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION
 60 CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION 3.1 IMPORTANCE OF OPTIC DISC Ocular fundus images provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular
60 CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION 3.1 IMPORTANCE OF OPTIC DISC Ocular fundus images provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Unit - I Computer vision Fundamentals
 Unit - I Computer vision Fundamentals It is an area which concentrates on mimicking human vision systems. As a scientific discipline, computer vision is concerned with the theory behind artificial systems
Unit - I Computer vision Fundamentals It is an area which concentrates on mimicking human vision systems. As a scientific discipline, computer vision is concerned with the theory behind artificial systems
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
IT Digital Image ProcessingVII Semester - Question Bank
 UNIT I DIGITAL IMAGE FUNDAMENTALS PART A Elements of Digital Image processing (DIP) systems 1. What is a pixel? 2. Define Digital Image 3. What are the steps involved in DIP? 4. List the categories of
UNIT I DIGITAL IMAGE FUNDAMENTALS PART A Elements of Digital Image processing (DIP) systems 1. What is a pixel? 2. Define Digital Image 3. What are the steps involved in DIP? 4. List the categories of
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Machine Vision Tools for Solving Auto ID Applications
 Machine Vision Tools for Solving Auto ID Applications Part 3 of a 3-part webinar series: Introduction to Machine Vision Track, Trace & Control Solutions About your Instructors Dr. Jonathan Ludlow Machine
Machine Vision Tools for Solving Auto ID Applications Part 3 of a 3-part webinar series: Introduction to Machine Vision Track, Trace & Control Solutions About your Instructors Dr. Jonathan Ludlow Machine
Digital Image Processing
 Digital Image Processing Jen-Hui Chuang Department of Computer Science National Chiao Tung University 2 3 Image Enhancement in the Spatial Domain 3.1 Background 3.4 Enhancement Using Arithmetic/Logic Operations
Digital Image Processing Jen-Hui Chuang Department of Computer Science National Chiao Tung University 2 3 Image Enhancement in the Spatial Domain 3.1 Background 3.4 Enhancement Using Arithmetic/Logic Operations
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Lecture 4 Image Enhancement in Spatial Domain
 Digital Image Processing Lecture 4 Image Enhancement in Spatial Domain Fall 2010 2 domains Spatial Domain : (image plane) Techniques are based on direct manipulation of pixels in an image Frequency Domain
Digital Image Processing Lecture 4 Image Enhancement in Spatial Domain Fall 2010 2 domains Spatial Domain : (image plane) Techniques are based on direct manipulation of pixels in an image Frequency Domain
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Review for Exam I, EE552 2/2009
 Gonale & Woods Review or Eam I, EE55 /009 Elements o Visual Perception Image Formation in the Ee and relation to a photographic camera). Brightness Adaption and Discrimination. Light and the Electromagnetic
Gonale & Woods Review or Eam I, EE55 /009 Elements o Visual Perception Image Formation in the Ee and relation to a photographic camera). Brightness Adaption and Discrimination. Light and the Electromagnetic