Lecture 7 Measurement Using a Single Camera. Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016
|
|
|
- Sheryl Malone
- 6 years ago
- Views:
Transcription
1 Lecture 7 Measurement Using a Single Camera Lin ZHANG, PhD School of Software Engineering Tongji University Fall 2016

2 If I have an image containing a coin, can you tell me the diameter of that coin?
3 Contents Foundations of Projective Geometry Matrix Differentiation Lagrange Multiplier Least squares for Linear Systems What is Camera Calibration Single Camera Calibration Bird s eye view Generation
4 Vector operations Vector representation a xi yjzk {, x y,} z Length (or norm) of a vector a x y z Normalized vector (unit vector) a { x, y, z } a a a a We say a 0, if and only if x 0, y 0, z 0
5 Vector operations a ( x, y, z ), b ( x2, y2, z2), ab ( x x, y y, z z ), if then b a ab a b cos x x y y z z Dot product (inner product) Laws of dot product: Theorem ab ba, a( b c)= ab+ ac ab 0 a b (why?)
6 Vector operations Cross product i j k ab x1 y1 z1 i j k x y z y z z x x y y z z x x y
7 Vector operations Cross product c a b is also a vector, whose direction is determined by the right hand law and c a, c b c a b sin c represents the oriented area of the parallelogram taking and a as two sides b (easy to prove) r r r r (why?) c b a
8 Vector operations Cross product Theorem Theorem ab,, same time, and ab ab0 (why?) they are not equal to zero at the (easy to understand) a b 0 Property r ( r r ) r r r r
9 Vector operations Mixed product (scalar triple product or box product) ( abc,, ) ( ab) c a a a b b Geometric Interpretation: it is the (signed) volume of the parallelepiped defined by the three vectors given b c c c


 c a a a 1 2 3 b")
 c ab c cos")
10 Vector operations Mixed product (scalar triple product or box product) ( abc,, ) ( ab) c a a a b b b c c c ( ab) c ab c cos absin ccos Base h c a
11 Vector operations Mixed product (scalar triple product or box product) ( abc,, ) ( ab) c Property: a a a b b b c c c ( abc,, ) ( bca,, ) ( cab,, ) ( abc,, ) ( bac,, ) ( acb,, ) why?
12 Vector operations Mixed product (scalar triple product or box product) Theorem abcare,, coplanar ( abc,, ) 0 why? abcare,, coplanar,, v, at the same time, and a bvc 0 they are not equal to zero
13 Foundations of Projective Geometry What is homogeneous coordinate? x, y, 0 T,,1, For a normal point on a plane kx y T Its homogenous coordinate is where k can be any non zero real number Homogenous coordinate for a point is not only one For a homogenous coordinate we usually rewrite it as x, y, z ' ' ' T ' ' ' ' x / z, y / z,1 T
14 Foundations of Projective Geometry What is homogeneous coordinate? For a normal point on a plane 0 Its homogenous coordinate is T k x, y,1, where k can be any non zero real number Converting from homogenous coordinate to inhomogeneous coordinate x ' T x, y, x z ' ' y ' ' y z ' z '
15 1 Foundations of Projective Geometry What is homogeneous coordinate? Geometric interpretation e 3 o 1 o e 2 M ( x, y ) e 1 e 2 e In plane, in the 2D frame, one point M :( x, y ) ( o : e, e ) Coordinate of any point on line OM in the frame ( o: e1, e2, e3) is the homogeneous coordinate of M These points can be represented as k x, y,1 T 0 0
16 1 Foundations of Projective Geometry What is homogeneous coordinate? Geometric interpretation e 3 o 1 o e 2 M ( x, y ) e 1 e 2 e In plane, in the 2D frame, one point M :( x, y ) ( o : e, e ) Coordinate of any point on line OM in the frame ( o: e1, e2, e3) is the homogeneous coordinate of M These points can be represented as k x, y,1 T 0 0 How about a line passing through O and parallel to 0?
17 Foundations of Projective Geometry What is homogeneous coordinate? Geometric interpretation e 3 How about a line passing through O and parallel to? 0 1 o 1 o e 2 e 1 e 2 M ( x, y ) Consider a line passing through O and M(x 0, y 0, 0) T We define: it meets 0 at an infinity e point, and also the homogeneous 1 coordinate of such a point can be represented as points on OM So, infinity point has the form (kx 0, ky 0, 0) T
18 Foundations of Projective Geometry What is homogeneous coordinate? Normal case: abnormal case: line k (x 0, y 0, 1) a normal point (x 0, y 0 ) on the plane 0 make an analogy line (kx 0, ky 0, 0) Define: it meets 0 at an infinity point The homogeneous coordinate of this normal point is k(x 0, y 0,1) The homogeneous coordinate of this infinity point is k(x 0, y 0,0)
19 Foundations of Projective Geometry What is homogeneous coordinate? Geometric interpretation e 3 How about a line passing through O and parallel to? 0 1 o 1 e 2 e 1 e 2 0 One infinity point determines an orientation We define: all infinity points on M ( x0, y0) o e comprise an infinity line 1 In fact, plane oee 1 2meets 0 at the infinity line Homogeneous equation of the infinity line is 0x + 0y + 1z = 0 0
20 Foundations of Projective Geometry 0 + infinity line = Projective plane Properties of a projective plane Two points determine a line; two lines determine a point (the second claim is not correct in the normal Euclidean plane) Two parallel lines intersect at an infinity point; that means one infinity point corresponds to a specific orientation Two parallel planes intersect at the infinity line

21 Foundations of Projective Geometry

22 Foundations of Projective Geometry JingHu High speed railway: rails will meet at the vanishing point
23 Foundations of Projective Geometry Lines in the homogeneous coordinate On a projective plane, please determine the line passing two ' points T T x ( x, y, z ), x ( x, y, z ) x M ' x 0 ox, o ' x determine two lines xx actually is the intersection between oxx and 0 1 e 2 o e 1
24 Foundations of Projective Geometry Lines in the homogeneous coordinate On a projective plane, please determine the line passing two ' points T T x ( x, y, z ), x ( x, y, z ) e 2 o x M e 1 ' x 0 Thus, M ( x, y, z) locates on xx om resides on the plane oxx ' ox, om, ox are coplanar x y z x y z x y z
25 Foundations of Projective Geometry Lines in the homogeneous coordinate On a projective plane, please determine the line passing two ' points T T x( x1, y1, z1), x ( x2, y2, z2) x y z y z z x x y x1 y1 z x 1 1 y 1 1 z y2 z2 z2 x2 x2 y2 x y z y z z x x y,, y z z x x y Homogeneous coordinate of the line Homogeneous coordinate of the infinity line is (0,0,1) T T 0
26 Foundations of Projective Geometry Lines in the homogeneous coordinate On a projective plane, please determine the line passing two ' points T T x( x1, y1, z1), x ( x2, y2, z2) x y z y z z x x y x1 y1 z x 1 1 y 1 1 z y2 z2 z2 x2 x2 y2 x y z Theorem xx, On the projective plane, the line passing two points is l x x ' y z z x x y,, y z z x x y T 0 '
27 Foundations of Projective Geometry Lines in the homogeneous coordinate x ( x, y, z ) T A point is on the line xl T (It is xl 0 ) l ( abc,, ) T
28 Foundations of Projective Geometry Lines in the homogeneous coordinate Theorem: On the projective plane, the intersection of two ' ' lines is the point ll, Proof: Two lines ax 1 by 1 cz 1 0, Inhomogeneous form, ax 1 by 1 c1 0 X ax 2 by 2 c2 0 x l l ax 2 by 2 cz 2 0 l T ' ( a1, b1, c1), l ( a2, b2, c2) x y X Y z z cb ac c b a c, Y ab ab a b a b T
29 x Foundations of Projective Geometry Lines in the homogeneous coordinate Theorem: On the projective plane, the intersection of two ' ' lines ll, is the point x l l Homogenous form of the cross point is cb 1 1 a1c1 cb 2 2 a2 c2 k,,1 ab 1 1 ab 1 1 ab 2 2 ab 2 2 x let bc 1 1 ca 1 1 ab 1 1,, b c c a a b k ab 1 1 a b 2 2 cb 1 1 a1c1 ab 1 1 x,, c2 b2 a2 c2 a2 b2 x ll '
30 Foundations of Projective Geometry Lines in the homogeneous coordinate Theorem: On the projective plane, the intersection of two ' ' lines is the point ll, x l l Example: find the cross point of the lines x1, y 1 y Homogeneous form y 1 1x1 0 x2 ( 1) x3 0 0x1 1 x2 ( 1) x3 0 o x x 1 T T lines are (1,0, 1),(0,1, 1) Homogeneous coordinates of the two Cross point is (1, 0, 1) T T (0,1, 1) 1,1,1 x x x x, y x
31 Foundations of Projective Geometry Lines in the homogeneous coordinate Theorem: On the projective plane, the intersection of two ' ' lines is the point ll, x l l Example: find the cross point of the lines x1, x 2 y Homogeneous form x 2 1x1 0 x2 ( 1) x3 0 1x1 0 x2 ( 2) x3 0 o x T T lines are (1,0, 1),(1,0, 2) x 1 Cross point is i j k Homogeneous coordinates of the two T T (1,0, 1) (1,0, 2) ,1,0 102 x x x x, y x
32 Foundations of Projective Geometry Duality In projective geometry, lines and points can swap their positions T xl 0 How to interpret? If x is a variable, it represents the points lying on the line l; If l is a variable, it represents the lines passing a fixed point x xx, ll, The line passing two points is ' The cross point of two lines is ' l xx ' x ll Duality Principle: To any theorem of projective geometry, there corresponds a dual theorem, which may be derived by interchanging the roles of points and lines in the original theorem '
33 Contents Foundations of Projective Geometry Matrix Differentiation Lagrange Multiplier Least squares for Linear Systems What is Camera Calibration Single Camera Calibration Bird s eye view Generation
34 Matrix differentiation Function is a vector and the variable is a scalar f( t) f1( t), f2( t),..., f ( ) T n t Definition df df () t df () t dfn t,,..., dt dt dt dt 1 2 () T
35 Matrix differentiation Function is a matrix and the variable is a scalar Definition f11( t) f12( t),..., f1 m( t) f21( t) f22( t),..., f2m( t) f() t fij () t fn1() t fn2(),..., t fnm() t df dt nm df11() t df12() t df1 (),..., m t dt dt dt df21() t df22() t df2m() t,..., dfij () t dt dt dt dt dfn 1() t dfn2() t dfnm() t,..., dt dt dt nm
36 Matrix differentiation Function is a scalar and the variable is a vector Definition In a similar way, f x x x1 x2 x n ( ), (,,..., ) T df f f f,,..., dx x1 x2 x f x x x1 x2 x n ( ), (,,..., ) df f f f,,..., dx x1 x2 x n n T
37 Matrix differentiation Function is a vector and the variable is a vector T x x, x,..., x, y y ( x), y ( x),..., y ( x) Definition dy dx 1 2 n 1 2 T y1( x) y1( x) y1( x),,..., x1 x2 x n y2( x) y2( x) y2( x),,..., x1 x2 x n y ( x) y ( x) y ( x),,..., m m m x1 x2 xn mn m T
38 Matrix differentiation Function is a vector and the variable is a vector T x x, x,..., x, y y ( x), y ( x),..., y ( x) 1 2 n 1 2 In a similar way, dy dx T y1( x) y2( x) ym( x),,..., x1 x1 x 1 y1( x) y2( x) ym( x),,..., x2 x2 x 2 y1( x) y2( x) ym( x),,..., x x x n n n n m m T
39 Matrix differentiation Function is a vector and the variable is a vector Example: x y y y x x x 1 1( x) 2 2, x2, y1( ) x1 x2, y2( ) x3 3x2 2( x) x 3 y1( x) y2( x) x x 1 1 2x1 0 T dy y1( x) y2( x) 1 3 dx x x x3 y1( x) y2( x) x x 3 3
40 Matrix differentiation Function is a scalar and the variable is a matrix Definition df ( X) dx f ( X), X mn f f f x11 x12 x1 n f f f x x x m1 m2 mn
41 Matrix differentiation Useful results (1) Then, d dx T ax xa, n1 d a, dx T xa a How to prove?
42 Matrix differentiation Useful results mn n1 dax (2) A, x Then, A T dx (3) mn n1 A, x Then, T T dx A T A dx (4) T nn n1 dx Ax T A, x Then, ( A A ) x dx (5) T mn m1 n1 daxb X, a, b Then, ab dx T T nm m1 n1 daxb (6) X, a, b Then, ba dx T dxx n1 (7) x Then, 2x dx T T
43 Contents Foundations of Projective Geometry Matrix Differentiation Lagrange Multiplier Least squares for Linear Systems What is Camera Calibration Single Camera Calibration Bird view Generation
44 Lagrange multiplier Single variable function x0 ( ab, ) f ( x) is differentiable in (a, b). At, f(x) achieves an extremum df dx Two variables function 0 x 0 ( x, y ) f ( x, y) is differentiable in its domain. At 0 0, f(x, y) achieves an extremum f x f ( x0, y0) 0, ( x0, y0) 0 y
45 Lagrange multiplier In general case If x 0 is a stationary point of f ( x), x n1 f f f 0, 0,..., x x x x x x 1 2 n
 0, k 1, 2,..., m Solution: 1 k F( x;,..., ) f( x) g ( x) ( x,,.")
46 Lagrange multiplier Lagrange multiplier is a strategy for finding the local extremum of a function subject to equality constraints Problem: find stationary points for y f( x), x under m constraints g ( x) 0, k 1, 2,..., m Solution: 1 k F( x;,..., ) f( x) g ( x) ( x,,..., m ) m k k k 1 is a stationary point of with constraints m If is a stationary point of F, then, x f ( x) 0 n1 Joseph Louis Lagrange Jan. 25, 1736~Apr.10, 1813
47 Lagrange multiplier Lagrange multiplier is a strategy for finding the local extremum of a function subject to equality constraints Problem: find stationary points for y f( x), x under m constraints g ( x) 0, k 1, 2,..., m Solution: F( x;,..., ) f( x) g ( x) 1 m m k k k 1 ( x0, 10,..., m 0) is a stationary point of F F F F F F F 0, 0,..., 0, 0, 0,..., 0 x x x 1 2 n 1 2 at that point k n + m equations! n1 m
48 Lagrange multiplier Example Problem: for a given point p 0 = (1, 0), among all the points lying on the line y=x, identify the one having the least distance to p 0. The distance is 2 2 f( x, y) ( x1) ( y0) y=x? Now we want to find the stationary point of f(x, y) under the constraint gxy (, ) yx0 According to Lagrange multiplier method, construct another function p 0 (,, ) ( ) ( ) ( 2 1) 2 ( ) F x y f x g x x y y x Find the stationary point for F( xy,, )
49 Lagrange multiplier Example Problem: for a given point p 0 = (1, 0), among all the points lying on the line y=x, identify the one having the least distance to p 0. F 0 x 2( x 1) 0 x 0.5 F 0? 2y 0 y y 0.5 x y 0 F 1 p 0 0 y=x (0.5,0.5,1) is a stationary point of (,, ) F xy (0.5,0.5)is a stationary point of f(x,y) under constraints
50 Contents Foundations of Projective Geometry Matrix Differentiation Lagrange Multiplier Least squares for Linear Systems Homograpy Estimation What is Camera Calibration Single Camera Calibration Bird view Generation
51 LS for Inhomogeneous Linear System Consider the following linear equations system x1x x1 3 2x1x x 2 4 A x b Matrix form: Ax b It can be easily solved x x


52 LS for Inhomogeneous Linear System How about the following one? x1x x1 2x1 x x 2 x1 2x It does not have a solution! What is the condition for a linear equation system can be solved? Ax b Can we solve it in an approximate way? A: we can use least squares technique! Carl Friedrich Gauss
53 LS for Inhomogeneous Linear System Let s consider a system of p linear equations with q unknowns a11x1 a12x2... a1 qxq b1 a x a x... a x b... a x a x... a x b q q 2 p1 1 p2 2 pq q p We consider the case: p>q, and rank(a)=q In general case, there is no solution! Ax Instead, we want to find a vector x that minimizes the error: p 2 E( ) ( ai 1x1... aiqxq i) A i1 x b xb 2 b unknowns

54 LS for Inhomogeneous Linear System * x arg min E( x) arg min Axb x x 2 2 x AA 1 A * T T b Pseudoinverse of A How about the pseudoinverse of A when A is square and non-singular?
55 LS for Homogeneous Linear System Let s consider a system of p linear equations with q unknowns a11x1 a12x2... a1 qxq 0 a21x1 a22x2... a2qxq 0... ap1x 1 ap2x 2... apqx q 0 We consider the case: p>q, and rank(a)=q Theoretically, there is only a trivial solution: x = 0 x 1 2 Ax 0 unknowns So, we add a constraint to avoid the trivial solution
56 LS for Homogeneous Linear System E( x) Ax We want to minimize, subject to 2 * x E x st x x arg min ( ),.., 1 Use the Lagrange multiplier to solve it, * 2 2 x arg min Ax 1 x 2 2 x 2 2 (1) x 1 2 Solving the stationary point of the Lagrange function, 2 2 Ax 1 x 2 2 x 2 2 Ax 1 x (3) (2)
57 LS for Homogeneous Linear System Then, we have Ax 1 x 2 2 x 2 2 T AAxx x is the eigen vector of A T A associated with the eigenvalue (3) T T T E x Ax x A Axx x The unit vector x is the eigenvector associated with the minimum T eigenvalue of A A
58 Contents Foundations of Projective Geometry Matrix Differentiation Lagrange Multiplier Least squares for Linear Systems Homograpy Estimation What is Camera Calibration Single Camera Calibration Bird s eye view Generation
59 Homography Estimation Problem definition: x x ' i Given a set of points i and a corresponding set of points in a projective plane, compute the projective transformation ' that takes to x i x i ' We know there existing an H satisfying xi Hxi, i 1,2,..., n Coordinates of and x are known, we need to find H x ' i i where H is a homography matrix a a a H a a a a a a It has 8 degrees of freedom
60 Homography Estimation 4 point correspondence pairs can uniquely determine a homography matrix since each correspondence pair solves two degrees of freedom cu a11 a12 a13 x cv a a a y c a31 a32 a 33 1 a xa ya a xa ya a xa ya a xa ya u v a11xa12 ya13 cu a21x a22 ya23 cv a31x a32 ya33 c
61 Homography Estimation 4 point correspondence pairs can uniquely determine a homography matrix since each correspondence pair solves two degrees of freedom a11 a12 a 13 a21 x y ux uy u a x y 1 vx vy v a23 Thus, four correspondence pairs a31 generate 8 equations a 32 a 33
62 Homography Estimation 4 point correspondence pairs can uniquely determine a homography matrix since each correspondence pair solves two degrees of freedom Ax (1) Normally, Rank( A) 8; thus (1) has 1 (9 8) solution vector in its solution space
63 Homography Estimation How about the case when there are more than 4 correspondence pairs? Use the LS method (for homogeneous case) to solve the model
64 Contents Foundations of Projective Geometry Matrix Differentiation Lagrange Multiplier Least squares for Linear Systems Homograpy Estimation What is Camera Calibration Single Camera Calibration Bird s eye view Generation
65 What is camera calibration? Camera calibration is a necessary step in 3D computer vision in order to extract metric information from 2D images It estimates the parameters of a lens and image sensor of the camera; you can use these parameters to correct for lens distortion, measure the size of an object in world units, or determine the location of the camera in the scene These tasks are used in applications such as machine vision to detect and measure objects. They are also used in robotics, for navigation systems, and 3 D scene reconstruction


66 What is camera calibration?
67 What is camera calibration? Camera parameters include Intrinsics Extrinsics Distortion coefficients
68 Contents Foundations of Projective Geometry Matrix Differentiation Lagrange Multiplier Least squares for Linear Systems Homograpy Estimation What is Camera Calibration Single Camera Calibration Bird s eye view Generation


69 Single Camera Calibration For simplicity, usually we use a pinhole camera model
70 Single Camera Calibration To model the image formation process, 4 coordinate systems are required World coordinate system (3D space) Camera coordinate system (3D space) Retinal coordinate system (2D space) Pixel coordinate system (2D space)

71 Single Camera Calibration To model the image formation process, 4 coordinate systems are required
72 Single Camera Calibration From the world CS to the camera CS T X, Y, Z is a 3D point represented in the WCS w w w In the camera CS, it is represented as, Xc Xw Yc R Yw Z c Z w 33 a rotation matrix (orthogonal) t a 31translation vector
73 Single Camera Calibration From the world CS to the camera CS T X, Y, Z is a 3D point represented in the WCS w w w In the camera CS, it is represented as, Xc Xw Yc R Yw Z c Z w t Homogeneous form X c X w R t Yc Yw T Z c 0 1 Z w 1 1 (1)

74 Single Camera Calibration From the camera CS to the retinal CS We can use a pin hole model to represent the mapping from the camera CS to the retinal CS
75 Single Camera Calibration From the camera CS to the retinal CS We can use a pin hole model to represent the mapping from the camera CS to the retinal CS f y z x O is the optical center, f is the focal length, P = [X c, Y c, Z c ] T is a scene point while P =(x, y) is its image on the retinal plane
76 Single Camera Calibration From the camera CS to the retinal CS X We can use a pin hole model to represent the mapping from the camera CS to the retinal CS X c c x Z c Y c y Y c Z f c Zc f Homogeneous form X c x f 000 Yc Z c y 0 f 00 Z c (2)
77 Single Camera Calibration From the retinal CS to the pixel CS The unit for retinal CS (x-y) is physical unit (e.g., mm, cm) while the unit for pixel CS (u-v) is pixel One pixel represents dx physical units along the x axis and represents dy physical units along the y axis; the image of the optical center is (u 0, v 0 ) 1 0 u0 dx u x 1 v 0 v 0 y dy
78 Single Camera Calibration From the retinal CS to the pixel CS If the two axis of the pixel plane are not perpendicular to each other, another parameter s is introduced to represent the skewness of the two axis 1 0 u0 dx u x 1 v 0 v 0 y dy s u0 dx u x 1 v 0 v 0 y dy (3)
79 Single Camera Calibration From Eqs.1~3, we can have 1 f s u0 sf u0 0 dx Xc 000 dx Xc u f 1 Yc f Yc Z c v 0 v 0. 0 f 00 0 v0 0. dy Z c dy Z c X c Xw Xw u0 0 u0 0 0 Yc 0 v0 0. R t u Yw Yw 0 v v0. R t Z T c 0 1 Z w Z w Intrinsic Extrinsic
80 u Single Camera Calibration X X u w w u 0 Yw Yw K [ R t] 0 0 [ R t] Z w Z w Zc v v , v Intrinsic Extrinsic 0 0, the coordinates of the principal point in the image plane and, the scale factors in image u and v axes, describing the skewness of the two image axes R and t determines the rigid transformation from the world coordinate system to the camera coordinate system Altogether, there are 11 parameters to be determined

81 Single Camera Calibration To accurately represent an ideal camera, the camera model can include the radial and tangential lens distortion Radial distortion occurs when light rays bend more near the edges of a lens than they do at its optical center; the smaller the lens, the greater the distortion
82 Single Camera Calibration To accurately represent an ideal camera, the camera model can include the radial and tangential lens distortion Radial distortion occurs when light rays bend more near the edges of a lens than they do at its optical center; the smaller the lens, the greater the distortion u u 1k r k r k r distorted v v 1k r k r k r distorted where r u v k, k, k are the radial distortion coefficients of the lens

83 Single Camera Calibration To accurately represent an ideal camera, the camera model can include the radial and tangential lens distortion Tangential distortion occurs when the lens and the image plane are not parallel
84 Single Camera Calibration To accurately represent an ideal camera, the camera model can include the radial and tangential lens distortion Tangential distortion occurs when the lens and the image plane are not parallel 2 2 u distorted u+ 21uv2 r 2u v v 2 uv r 2v distorted , 2 are the tangential distortion coefficients of the lens
85 Single Camera Calibration The purpose of the camera calibration is to determine the values for the extrinsics, intrinsics, and distortion coefficients How to do? Zhengyou Zhang s method [1] is a commonly used modern approach A calibration board is needed; several images of the board need to be captured; based on the correspondence pairs (pixel coordinate and world coordinate of a feature point), equation systems can be obtained; by solving the equation systems, parameters can be determined [1] Z. Zhang, A flexible new technique for camera calibration, IEEE Trans. Pattern Analysis and Machine Intelligence, 2000

86 Single Camera Calibration Calibration board


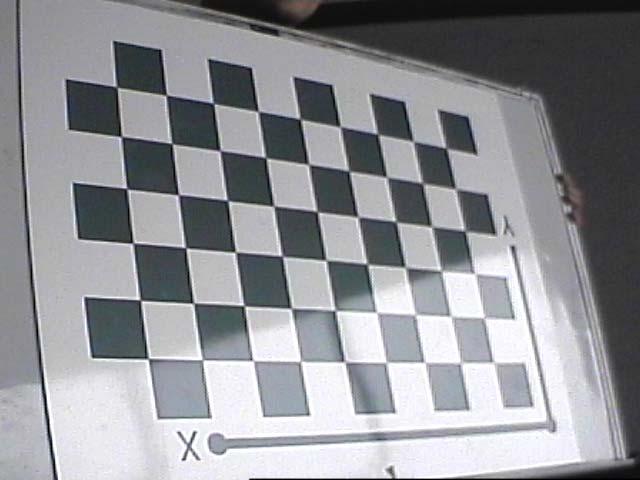
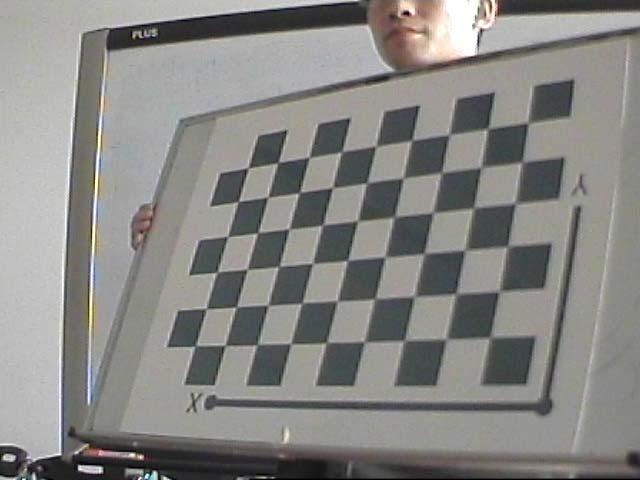
87 Single Camera Calibration A set of Calibration board images (50~60)
88 Single Camera Calibration Matlab provides a Camera Calibrator Straightforward to use However, based on my experience, it is not as accurate as the routine provided in opencv3.0, especially for large FOV cameras (such as fisheye camera); thus, for some accuracy critical applications, I recommend to use the opencv function, though a little more complicated It exports cameraparams as the calibration result

89 Single Camera Calibration
90 Single Camera Calibration For our purpose (measuring geometric metrics of a planar object), we use the camera parameters to undistort the image The essence of this step is to make sure the transformation from a physical plane to the image plane can be represented by a linear projective matrix; or in other words, a straight line should be mapped to a straight line


91 Single Camera Calibration Original image Undistorted image
92 Contents Foundations of Projective Geometry Matrix Differentiation Lagrange Multiplier Least squares for Linear Systems Homograpy Estimation What is Camera Calibration Single Camera Calibration Bird s eye view Generation
93 Bird s eye view Generation Our task is to measure the geometric properties of objects on a plane (e.g., conveyor belt) Such a problem can be solved if we have its bird view image; bird s eye view is easy for object detection and measurement
94 Bird s eye view Generation Three coordinate systems are required Bird s eye view image coordinate system World coordinate system Undistorted image coordinate system Y X X X Similarity Projective Y Y Bird s eye view image WCS Undistorted image
95 Bird s eye view Generation Basic idea for bird s eye view generation Suppose that the transformation matrix from bird s eye view to WCS is PB W and the transformation matrix from WCS to the undistorted image is PW I Then, given a position x,,1 T B yb on bird s eye view, we can get its corresponding position in the undistorted image as xb xi PWIPB W yb 1 Then, the intensity of the pixel x,,1 T B yb can be determined using some interpolation technique based on the neighborhood around on the undistorted image x I
96 Bird s eye view Generation Basic idea for bird s eye view generation Suppose that the transformation matrix from bird s eye view to WCS is PB W and the transformation matrix from WCS to the undistorted image is PW I P PW I The key problem is how to obtain B W and?








97 Bird s eye view Generation Determine P BW N (pixels) Y X H (mm) X M (pixels) Y
98 Bird s eye view Generation Determine P BW For a point xb yb on bird s eye view, the corresponding point on the world coordinate system is,,,1 T H HN 0 M 2M xw xb xb H H y W 0 yb PB W yb M Please verify!!
99 Bird s eye view Generation Determine W P I The physical plane (in WCS) and the undistorted image plane can be linked via a homography matrix P WI x x I PW I W N Ii Wii 1 If we know a set of correspondence pairs x, x, PW I can be estimated using the least square method

100 Bird s eye view Generation Determine W P I A set of point correspondence pairs; for each pair, we know its coordinate on the undistorted image plane and its coordinate in the WCS
101 Bird s eye view Generation When P BW and PW I are known, the bird s eye view can be generated via, x xb xb P P y P y 1 1 I W I B W B B I B


102 Bird s eye view Generation Original image Bird s eye view

103 Bird view Generation Another example Original fish eye image Undistorted image

104 Bird view Generation Another example Original fish eye image Bird s eye view

105 Thanks for your attention
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Facial Expression Recognition
 Facial Expression Recognition YING SHEN SSE, TONGJI UNIVERSITY Facial expression recognition Page 1 Outline Introduction Facial expression recognition Appearance-based vs. model based Active appearance
Facial Expression Recognition YING SHEN SSE, TONGJI UNIVERSITY Facial expression recognition Page 1 Outline Introduction Facial expression recognition Appearance-based vs. model based Active appearance
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS-9645 Introduction to Computer Vision Techniques Winter 2019
 Table of Contents Projective Geometry... 1 Definitions...1 Axioms of Projective Geometry... Ideal Points...3 Geometric Interpretation... 3 Fundamental Transformations of Projective Geometry... 4 The D
Table of Contents Projective Geometry... 1 Definitions...1 Axioms of Projective Geometry... Ideal Points...3 Geometric Interpretation... 3 Fundamental Transformations of Projective Geometry... 4 The D
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Lecture 3: Camera Calibration, DLT, SVD
 Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Augmented Reality II - Camera Calibration - Gudrun Klinker May 11, 2004
 Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Robot Vision: Projective Geometry
 Robot Vision: Projective Geometry Ass.Prof. Friedrich Fraundorfer SS 2018 1 Learning goals Understand homogeneous coordinates Understand points, line, plane parameters and interpret them geometrically
Robot Vision: Projective Geometry Ass.Prof. Friedrich Fraundorfer SS 2018 1 Learning goals Understand homogeneous coordinates Understand points, line, plane parameters and interpret them geometrically
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Projective geometry for Computer Vision
 Department of Computer Science and Engineering IIT Delhi NIT, Rourkela March 27, 2010 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence
Department of Computer Science and Engineering IIT Delhi NIT, Rourkela March 27, 2010 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
521466S Machine Vision Exercise #1 Camera models
 52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
52466S Machine Vision Exercise # Camera models. Pinhole camera. The perspective projection equations or a pinhole camera are x n = x c, = y c, where x n = [x n, ] are the normalized image coordinates,
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
CS 664 Slides #9 Multi-Camera Geometry. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
Multiple Views Geometry
 Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Single View Geometry. Camera model & Orientation + Position estimation. Jianbo Shi. What am I? University of Pennsylvania GRASP
 Single View Geometry Camera model & Orientation + Position estimation Jianbo Shi What am I? 1 Camera projection model The overall goal is to compute 3D geometry of the scene from just 2D images. We will
Single View Geometry Camera model & Orientation + Position estimation Jianbo Shi What am I? 1 Camera projection model The overall goal is to compute 3D geometry of the scene from just 2D images. We will
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
Viewing. Reading: Angel Ch.5
 Viewing Reading: Angel Ch.5 What is Viewing? Viewing transform projects the 3D model to a 2D image plane 3D Objects (world frame) Model-view (camera frame) View transform (projection frame) 2D image View
Viewing Reading: Angel Ch.5 What is Viewing? Viewing transform projects the 3D model to a 2D image plane 3D Objects (world frame) Model-view (camera frame) View transform (projection frame) 2D image View
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Agenda. Perspective projection. Rotations. Camera models
 Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
3D reconstruction class 11
 3D reconstruction class 11 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan. 14, 16
3D reconstruction class 11 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan. 14, 16
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
Midterm Exam Solutions
 Midterm Exam Solutions Computer Vision (J. Košecká) October 27, 2009 HONOR SYSTEM: This examination is strictly individual. You are not allowed to talk, discuss, exchange solutions, etc., with other fellow
Midterm Exam Solutions Computer Vision (J. Košecká) October 27, 2009 HONOR SYSTEM: This examination is strictly individual. You are not allowed to talk, discuss, exchange solutions, etc., with other fellow
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing points & line http://www.wetcanvas.com/ http://pennpaint.blogspot.com/ http://www.joshuanava.biz/perspective/in-other-words-the-observer-simply-points-in-thesame-direction-as-the-lines-in-order-to-find-their-vanishing-point.html
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing points & line http://www.wetcanvas.com/ http://pennpaint.blogspot.com/ http://www.joshuanava.biz/perspective/in-other-words-the-observer-simply-points-in-thesame-direction-as-the-lines-in-order-to-find-their-vanishing-point.html
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
3-D D Euclidean Space - Vectors
 3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
Module 4F12: Computer Vision and Robotics Solutions to Examples Paper 2
 Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Computer Vision. Geometric Camera Calibration. Samer M Abdallah, PhD
 Computer Vision Samer M Abdallah, PhD Faculty of Engineering and Architecture American University of Beirut Beirut, Lebanon Geometric Camera Calibration September 2, 2004 1 Computer Vision Geometric Camera
Computer Vision Samer M Abdallah, PhD Faculty of Engineering and Architecture American University of Beirut Beirut, Lebanon Geometric Camera Calibration September 2, 2004 1 Computer Vision Geometric Camera
Hand-Eye Calibration from Image Derivatives
 Hand-Eye Calibration from Image Derivatives Abstract In this paper it is shown how to perform hand-eye calibration using only the normal flow field and knowledge about the motion of the hand. The proposed
Hand-Eye Calibration from Image Derivatives Abstract In this paper it is shown how to perform hand-eye calibration using only the normal flow field and knowledge about the motion of the hand. The proposed
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera calibration. Robotic vision. Ville Kyrki
 Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Stereo Observation Models
 Stereo Observation Models Gabe Sibley June 16, 2003 Abstract This technical report describes general stereo vision triangulation and linearized error modeling. 0.1 Standard Model Equations If the relative
Stereo Observation Models Gabe Sibley June 16, 2003 Abstract This technical report describes general stereo vision triangulation and linearized error modeling. 0.1 Standard Model Equations If the relative
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Camera model and calibration
 and calibration AVIO tristan.moreau@univ-rennes1.fr Laboratoire de Traitement du Signal et des Images (LTSI) Université de Rennes 1. Mardi 21 janvier 1 AVIO tristan.moreau@univ-rennes1.fr and calibration
and calibration AVIO tristan.moreau@univ-rennes1.fr Laboratoire de Traitement du Signal et des Images (LTSI) Université de Rennes 1. Mardi 21 janvier 1 AVIO tristan.moreau@univ-rennes1.fr and calibration
Projective geometry, camera models and calibration
 Projective geometry, camera models and calibration Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 6, 2008 The main problems in computer vision Image
Projective geometry, camera models and calibration Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 6, 2008 The main problems in computer vision Image
3D Computer Vision II. Reminder Projective Geometry, Transformations
 3D Computer Vision II Reminder Projective Geometry, Transformations Nassir Navab" based on a course given at UNC by Marc Pollefeys & the book Multiple View Geometry by Hartley & Zisserman" October 21,
3D Computer Vision II Reminder Projective Geometry, Transformations Nassir Navab" based on a course given at UNC by Marc Pollefeys & the book Multiple View Geometry by Hartley & Zisserman" October 21,
CS231A Course Notes 4: Stereo Systems and Structure from Motion
 CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
AQA GCSE Further Maths Topic Areas
 AQA GCSE Further Maths Topic Areas This document covers all the specific areas of the AQA GCSE Further Maths course, your job is to review all the topic areas, answering the questions if you feel you need
AQA GCSE Further Maths Topic Areas This document covers all the specific areas of the AQA GCSE Further Maths course, your job is to review all the topic areas, answering the questions if you feel you need
Improving camera calibration
 Applying a least squares method to control point measurement 27th May 2005 Master s Thesis in Computing Science, 20 credits Supervisor at CS-UmU: Niclas Börlin Examiner: Per Lindström UmeåUniversity Department
Applying a least squares method to control point measurement 27th May 2005 Master s Thesis in Computing Science, 20 credits Supervisor at CS-UmU: Niclas Börlin Examiner: Per Lindström UmeåUniversity Department
Computer Vision: Lecture 3
 Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Image Formation I Chapter 2 (R. Szelisky)
") Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Epipolar Geometry and the Essential Matrix
 Epipolar Geometry and the Essential Matrix Carlo Tomasi The epipolar geometry of a pair of cameras expresses the fundamental relationship between any two corresponding points in the two image planes, and
Epipolar Geometry and the Essential Matrix Carlo Tomasi The epipolar geometry of a pair of cameras expresses the fundamental relationship between any two corresponding points in the two image planes, and
Hartley - Zisserman reading club. Part I: Hartley and Zisserman Appendix 6: Part II: Zhengyou Zhang: Presented by Daniel Fontijne
 Hartley - Zisserman reading club Part I: Hartley and Zisserman Appendix 6: Iterative estimation methods Part II: Zhengyou Zhang: A Flexible New Technique for Camera Calibration Presented by Daniel Fontijne
Hartley - Zisserman reading club Part I: Hartley and Zisserman Appendix 6: Iterative estimation methods Part II: Zhengyou Zhang: A Flexible New Technique for Camera Calibration Presented by Daniel Fontijne
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Planar pattern for automatic camera calibration
 Planar pattern for automatic camera calibration Beiwei Zhang Y. F. Li City University of Hong Kong Department of Manufacturing Engineering and Engineering Management Kowloon, Hong Kong Fu-Chao Wu Institute
Planar pattern for automatic camera calibration Beiwei Zhang Y. F. Li City University of Hong Kong Department of Manufacturing Engineering and Engineering Management Kowloon, Hong Kong Fu-Chao Wu Institute
Last week. Machiraju/Zhang/Möller
 Last week Machiraju/Zhang/Möller 1 Overview of a graphics system Output device Input devices Image formed and stored in frame buffer Machiraju/Zhang/Möller 2 Introduction to CG Torsten Möller 3 Ray tracing:
Last week Machiraju/Zhang/Möller 1 Overview of a graphics system Output device Input devices Image formed and stored in frame buffer Machiraju/Zhang/Möller 2 Introduction to CG Torsten Möller 3 Ray tracing:
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Structure from Motion
 Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Contents. 1 Introduction Background Organization Features... 7
 Contents 1 Introduction... 1 1.1 Background.... 1 1.2 Organization... 2 1.3 Features... 7 Part I Fundamental Algorithms for Computer Vision 2 Ellipse Fitting... 11 2.1 Representation of Ellipses.... 11
Contents 1 Introduction... 1 1.1 Background.... 1 1.2 Organization... 2 1.3 Features... 7 Part I Fundamental Algorithms for Computer Vision 2 Ellipse Fitting... 11 2.1 Representation of Ellipses.... 11
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
C / 35. C18 Computer Vision. David Murray. dwm/courses/4cv.
 C18 2015 1 / 35 C18 Computer Vision David Murray david.murray@eng.ox.ac.uk www.robots.ox.ac.uk/ dwm/courses/4cv Michaelmas 2015 C18 2015 2 / 35 Computer Vision: This time... 1. Introduction; imaging geometry;
C18 2015 1 / 35 C18 Computer Vision David Murray david.murray@eng.ox.ac.uk www.robots.ox.ac.uk/ dwm/courses/4cv Michaelmas 2015 C18 2015 2 / 35 Computer Vision: This time... 1. Introduction; imaging geometry;
Scene Modeling for a Single View
 on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
Geometric Computing. in Image Analysis and Visualization. Lecture Notes March 2007
 . Geometric Computing in Image Analysis and Visualization Lecture Notes March 2007 Stefan Carlsson Numerical Analysis and Computing Science KTH, Stockholm, Sweden stefanc@bion.kth.se Contents Cameras and
. Geometric Computing in Image Analysis and Visualization Lecture Notes March 2007 Stefan Carlsson Numerical Analysis and Computing Science KTH, Stockholm, Sweden stefanc@bion.kth.se Contents Cameras and
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
1 I am given. (Label the triangle with letters and mark congruent parts based on definitions.)
") Name (print first and last) Per Date: 12/13 due 12/15 5.2 Congruence Geometry Regents 2013-2014 Ms. Lomac SLO: I can use SAS to prove the isosceles triangle theorem. (1) Prove: If a triangle is isosceles
Name (print first and last) Per Date: 12/13 due 12/15 5.2 Congruence Geometry Regents 2013-2014 Ms. Lomac SLO: I can use SAS to prove the isosceles triangle theorem. (1) Prove: If a triangle is isosceles
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Introduction to Computer Vision. Week 3, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Computer Vision Projective Geometry and Calibration
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Lecture 5.3 Camera calibration. Thomas Opsahl
 Lecture 5.3 Camera calibration Thomas Opsahl Introduction The image u u x X W v C z C World frame x C y C z C = 1 For finite projective cameras, the correspondence between points in the world and points
Lecture 5.3 Camera calibration Thomas Opsahl Introduction The image u u x X W v C z C World frame x C y C z C = 1 For finite projective cameras, the correspondence between points in the world and points
Computer Vision I Name : CSE 252A, Fall 2012 Student ID : David Kriegman Assignment #1. (Due date: 10/23/2012) x P. = z
 x P. = z") Computer Vision I Name : CSE 252A, Fall 202 Student ID : David Kriegman E-Mail : Assignment (Due date: 0/23/202). Perspective Projection [2pts] Consider a perspective projection where a point = z y x P
Computer Vision I Name : CSE 252A, Fall 202 Student ID : David Kriegman E-Mail : Assignment (Due date: 0/23/202). Perspective Projection [2pts] Consider a perspective projection where a point = z y x P