CSc Topics in Computer Graphics 3D Photography
|
|
|
- Ira Wade
- 5 years ago
- Views:
Transcription
1 CSc Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues) Class website: Computer Vision Illumination Sensors: Digital Cameras (2D) Range Scanners (3D) Physical 3D World Vision System Scene Description Geometry Reflectance
2 3D Photography & Graphics Scene Description Geometry Reflectance Captured from Vision System Model of Illumination Model of the Physical World Modeling [Representation of 3D objects] Rendering [Construction of 2D images from 3D models] Animation [Simulating changes over time] Representations of 3D Scenes Geometry and Material Geometry and Images Images with Depth Panorama with Depth Complete description Traditional texture mapping Global Geometry Local Geometry Light-Field/Lumigraph Facade Panorama Colored Voxels Scene as a light source No/Approx. Geometry False Geometry
 - view interpolation McMillan and")
 - light field rendering Slide by")


3 New trends: Image-Based Rendering Chen and Williams (1993) - view interpolation McMillan and Bishop (1995) - plenoptic modeling Levoy and Hanrahan (1996) - light field rendering Slide by Ravi Ramamoorthi, Columbia University The graphics pipeline the traditional pipeline modeling animation rendering the new pipeline? 3D scanning motion capture image-based rendering Slide courtesy Marc Levoy
4 CSc Syllabus Capturing 3D data Laser scanning/stereo basics 3D modeling pipeline Segmentation/Registration Mesh/Volume Construction Rendering Image-based rendering Texture mapping Student projects (to be determined) 3D Photography - Applications Virtual worlds (Film Industry/Graphics) Urban Planning (Civil Applications) Historical Preservation and Archaeology Reverse Engineering (Manufacturing) E-commerce (Web-based models) Remote presence (Google Earth)

5 3D Photography System Cyrax Range Scanner Spot laser scanner Time of flight. Max Range: 100m. Scanning time: 20 minutes for 1000 x1000 points. Accuracy: 6mm.

6 Beauvais Cathedral, France.



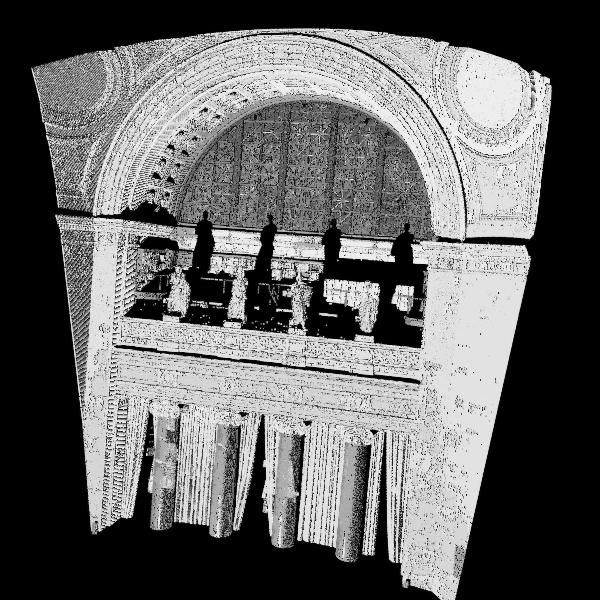
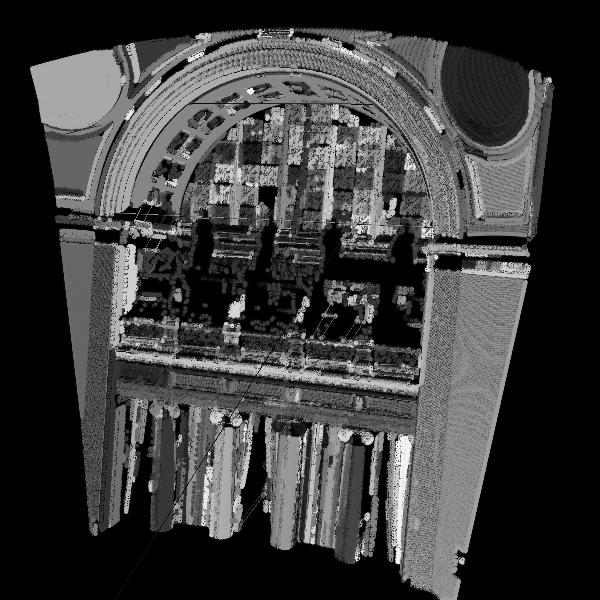
7 Range Scanning Outdoor Structures
8 Technical Challenges Global and coherent geometry Remove redundancy Handle holes Handle all types of geometries Registration of point sets Reducing data complexity Range and intensity image fusion Brightness Images System Overview Range Images 2D line extraction Planar Segmentation 3D line extraction Solid Sweeps Range-Intensity Registration Range-Range Registration Volume Intersection FINAL PHOTOREALISTIC MODEL FINAL SOLID MODEL


9 Brightness Images System Overview Range Images 2D line extraction Planar Segmentation 3D line extraction Solid Sweeps Range-Intensity Registration Range-Range Registration Volume Intersection FINAL PHOTOREALISTIC MODEL FINAL SOLID MODEL Planar Segmentation (1)
10 Segmentation algorithm Fit local plane to neighborhood of range points. Classify range points: planar, non-planar, uknown. Sequentially label range image Connected clusters of co-planar points. Fit one plane to all points of cluster. Identify boundaries of planes. Local Planarity Comparison N N 1 2 P 1 P 2 R 12 Patches fit around points P1 and P2 P1 and P2 are coplanar if: -1 a=cos (N1. N2) < angle threshold d=max( R12 N1, R12 N2 ) < distance threshold



11 Italian House (view 1) Planar Segmentation (view 2)
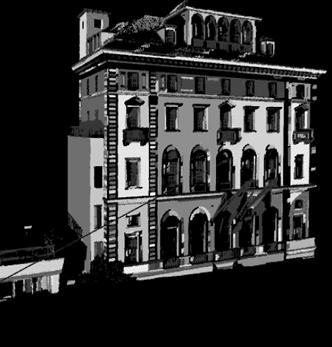
12 Planar Segmentation (view 3)



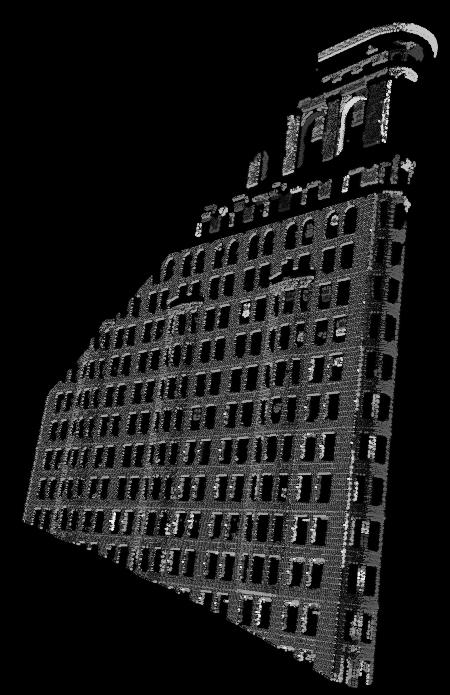
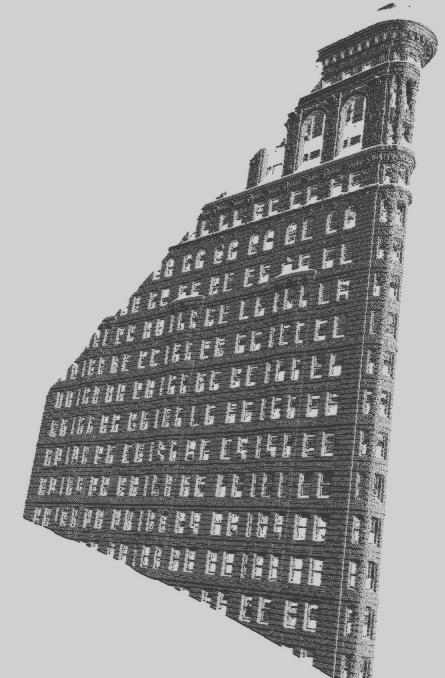
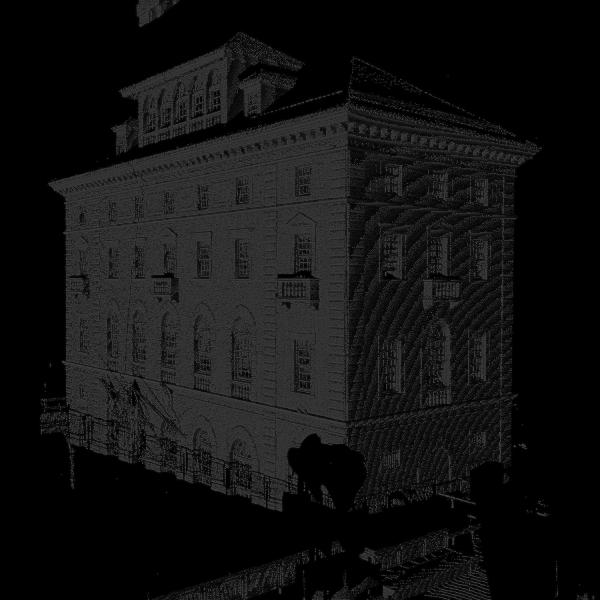
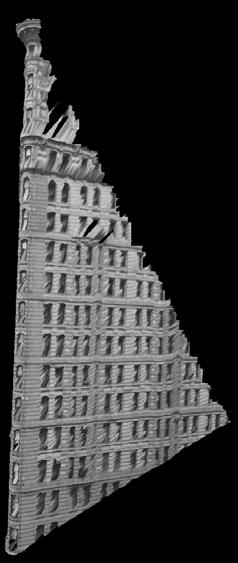
13 Image Flat Iron Building Scan 1 Segmented Scan 1 Scan 2 Segmented Scan 2
")
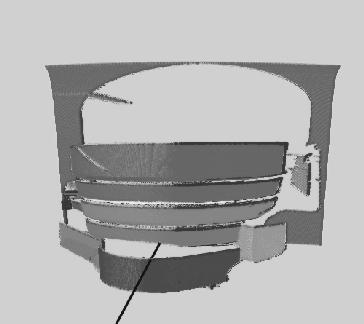
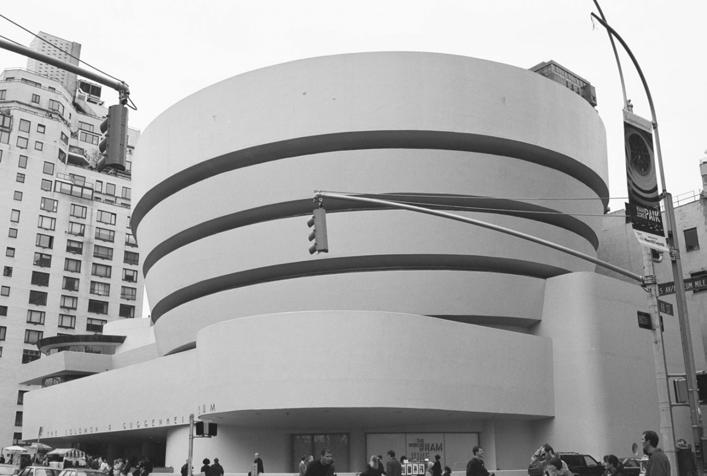
14 Guggenheim (view 1) Segmentation (view 1)
15 Brightness Images System Overview Range Images 2D line extraction Planar Segmentation 3D line extraction Solid Sweeps Range-Intensity Registration Range-Range Registration Volume Intersection FINAL PHOTOREALISTIC MODEL FINAL SOLID MODEL 3D Line Detection Intersect neighboring planes. Discard lines produced by far away planes. Keep parts of lines verified by the range-set.

16 3D Line Detection, Plane Intersections.d1: Distance from face 1.d2:Distance from face 2 Border of face 1 Border of face 2 3D line Infinite Plane 1 Infinite Plane 2 Max(d1, d2) must be less than threshold Tpoly 3D lines


17 3D lines (Italian House) Brightness Images System Overview Range Images 2D line extraction Planar Segmentation 3D line extraction Solid Sweeps Range-Intensity Registration Range-Range Registration Volume Intersection FINAL PHOTOREALISTIC MODEL FINAL SOLID MODEL



18 Italian House: 3 registered views Common Coordinate System Flat Iron: 2 registered views

19 Brightness Images System Overview Range Images 2D line extraction Planar Segmentation 3D line extraction Solid Sweeps Range-Intensity Registration Range-Range Registration Volume Intersection FINAL PHOTOREALISTIC MODEL FINAL SOLID MODEL

 Angle")

20 Range Scan and Extruded Solid Model White Facets: Imaged Object Surfaces Red Facets: Unimaged, Occluded Object Surfaces Surface Classifiers: 1) Angle between facet surface normal and scan direction. 2) geometry of triangular facet.




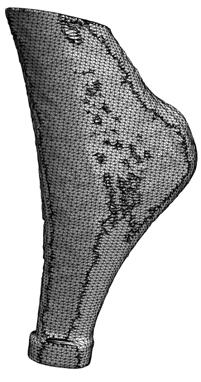
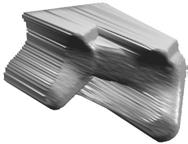




21 Example: Hip Replacement Example: Video Game Controller



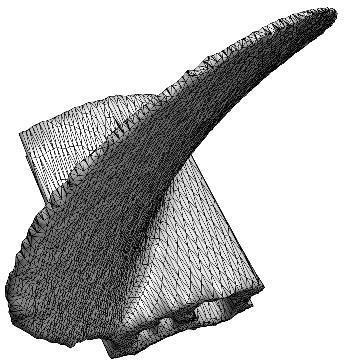
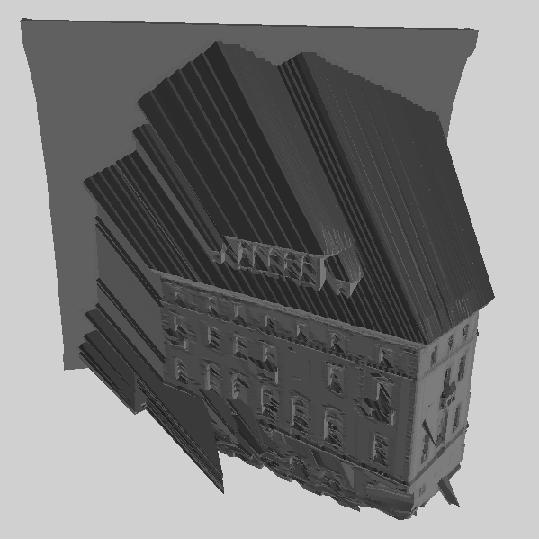

22 Example: Propeller Blade Italian House: 2 sweeps
.")

23 Italian House (cont). Third Sweep Final Solid Range-Intensity Registration
24 Automated Range-Image Registration 1. Find internal camera calibration: use vanishing points. 2. Find camera rotation: Use vanishing points and orthogonality constraints. 3. Find camera translation: Match rectangular features. 4. Refinement of Rotation, Translation: backprojection of 3D lines on 2D image. Vanishing Points

 2D rectangles 3D")
25 Matching higher order features Results: Extracted Rectangles (1) 2D rectangles 3D rectangles

26 Results (cont) Second View 2D rectangles 3D rectangles Matched Rectangles (1) Set of 6 matched rectangles found by RANSAC. 2D rectangles: GREEN. 3D rectangles projected on image (after registration): RED.

: RED.")
27 Matching: Refinement Matched Rectangles (2) 2D rectangles: GREEN. 3D rectangles projected on image (after registration): RED. Set of 8 matched Rectangles found by RANSAC. All rectangles.


28 First view:texture map Second view:texture map


29 Flat Iron Building 3 novel views Guggenheim Museum, NYC

30 Guggenheim: 3-D model with imagery A Site Modeling Robot Build accurate models of large structures Given a 2-D 2 D map, build 3-D 3 D models Integrates 2-D 2 D imagery with range data Use planning to navigate to new views Register sensor data with the environment


31 Mobile Robot for Site Modeling AVENUE Autonomous Vehicle Exploring & Navigating Urban Environments The Digital Michelangelo Project Marc Levoy Computer Science Department Stanford University
 pan (blue)")



32 Marc Levoy (Stanford) calibrated motions pitch (yellow) pan (blue) horizontal translation (orange) uncalibrated motions vertical translation remounting the scan head moving the entire gantry Scanner design 4 motorized axes truss extensions for tall statues laser, range camera, white light, and color camera



33 Scanning the David height of gantry: weight of gantry: 7.5 meters 800 kilograms Statistics about the scan 480 individually aimed scans 2 billion polygons 7,000 color images 32 gigabytes 30 nights of scanning 22 people




34 Head of Michelangelo s David photograph 1.0 mm computer model David s s left eye 0.25 mm model photograph holes from Michelangelo s drill artifacts from space carving noise from laser scatter
 Dynamic Scenes Dynamic 3D model.")
35 Dynamic Scenes Image sequence (CMU, Virtualized Reality Project) Dynamic Scenes Dynamic 3D model.





36 Dynamic Scenes Dynamic texture-mapped model. Lumigraph Example acquisition stage volumetric model novel view Recent work: Unstructured Lumigraph (SIGGRAPH 2001)
 natural eye level")

37 Acquiring the light field (IBR) natural eye level artificial illumination 7 light slabs, each 70cm x 70cm
Perspective projection
 Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
3D Scanning. Lecture courtesy of Szymon Rusinkiewicz Princeton University
 3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
3D Scanning Lecture courtesy of Szymon Rusinkiewicz Princeton University Computer Graphics Pipeline 3D Scanning Shape Motion Rendering Lighting and Reflectance Human time = expensive Sensors = cheap Computer
Geometry and Texture Recovery of Scenes of Large Scale
 Computer Vision and Image Understanding 88, 94 118 (2002) doi:10.1006/cviu.2002.0963 Geometry and Texture Recovery of Scenes of Large Scale Ioannis Stamos Computer Science Department, Hunter College and
Computer Vision and Image Understanding 88, 94 118 (2002) doi:10.1006/cviu.2002.0963 Geometry and Texture Recovery of Scenes of Large Scale Ioannis Stamos Computer Science Department, Hunter College and
Image-based modeling (IBM) and image-based rendering (IBR)
 and image-based rendering (IBR)") Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS
 AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS Ioannis Stamos Department of Computer Science Hunter College, City University of New York 695 Park Avenue, New York NY 10065 istamos@hunter.cuny.edu http://www.cs.hunter.cuny.edu/
AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS Ioannis Stamos Department of Computer Science Hunter College, City University of New York 695 Park Avenue, New York NY 10065 istamos@hunter.cuny.edu http://www.cs.hunter.cuny.edu/
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Data Acquisition, Leica Scan Station 2, Park Avenue and 70 th Street, NY
 Automated registration of 3D-range with 2D-color images: an overview 44 th Annual Conference on Information Sciences and Systems Invited Session: 3D Data Acquisition and Analysis March 19 th 2010 Ioannis
Automated registration of 3D-range with 2D-color images: an overview 44 th Annual Conference on Information Sciences and Systems Invited Session: 3D Data Acquisition and Analysis March 19 th 2010 Ioannis
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Image-Based Modeling and Rendering
 Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Ioannis Stamos and P eter K. Allen, Colum bia University,fistamos, acquisition, segmentation, volumetric modeling, viewpoint
 3 D Model Construction Using Range and Image Data Λ Ioannis Stamos and P eter K. Allen, Colum bia University,fistamos, alleng@cs.columbia.edu Abstract This paper deals with the automated creation of geometric
3 D Model Construction Using Range and Image Data Λ Ioannis Stamos and P eter K. Allen, Colum bia University,fistamos, alleng@cs.columbia.edu Abstract This paper deals with the automated creation of geometric
But, vision technology falls short. and so does graphics. Image Based Rendering. Ray. Constant radiance. time is fixed. 3D position 2D direction
 Computer Graphics -based rendering Output Michael F. Cohen Microsoft Research Synthetic Camera Model Computer Vision Combined Output Output Model Real Scene Synthetic Camera Model Real Cameras Real Scene
Computer Graphics -based rendering Output Michael F. Cohen Microsoft Research Synthetic Camera Model Computer Vision Combined Output Output Model Real Scene Synthetic Camera Model Real Cameras Real Scene
Image-Based Rendering. Johns Hopkins Department of Computer Science Course : Rendering Techniques, Professor: Jonathan Cohen
 Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric( info) as key component of model representation What s Good about IBR Model acquisition
Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric( info) as key component of model representation What s Good about IBR Model acquisition
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Image-Based Rendering. Johns Hopkins Department of Computer Science Course : Rendering Techniques, Professor: Jonathan Cohen
 Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric( info) as key component of model representation What s Good about IBR Model acquisition
Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric( info) as key component of model representation What s Good about IBR Model acquisition
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India
 A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
CS 684 Fall 2005 Image-based Modeling and Rendering. Ruigang Yang
 CS 684 Fall 2005 Image-based Modeling and Rendering Ruigang Yang Administrivia Classes: Monday and Wednesday, 4:00-5:15 PM Instructor: Ruigang Yang ryang@cs.uky.edu Office Hour: Robotics 514D, MW 1500-1600
CS 684 Fall 2005 Image-based Modeling and Rendering Ruigang Yang Administrivia Classes: Monday and Wednesday, 4:00-5:15 PM Instructor: Ruigang Yang ryang@cs.uky.edu Office Hour: Robotics 514D, MW 1500-1600
Image Base Rendering: An Introduction
 Image Base Rendering: An Introduction Cliff Lindsay CS563 Spring 03, WPI 1. Introduction Up to this point, we have focused on showing 3D objects in the form of polygons. This is not the only approach to
Image Base Rendering: An Introduction Cliff Lindsay CS563 Spring 03, WPI 1. Introduction Up to this point, we have focused on showing 3D objects in the form of polygons. This is not the only approach to
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Light Fields. Johns Hopkins Department of Computer Science Course : Rendering Techniques, Professor: Jonathan Cohen
 Light Fields Light Fields By Levoy and Hanrahan, SIGGRAPH 96 Representation for sampled plenoptic function stores data about visible light at various positions and directions Created from set of images
Light Fields Light Fields By Levoy and Hanrahan, SIGGRAPH 96 Representation for sampled plenoptic function stores data about visible light at various positions and directions Created from set of images
Image or Object? Is this real?
 Image or Object? Michael F. Cohen Microsoft Is this real? Photo by Patrick Jennings (patrick@synaptic.bc.ca), Copyright 1995, 96, 97 Whistler B. C. Canada Modeling, Rendering, and Lighting 1 A mental model?
Image or Object? Michael F. Cohen Microsoft Is this real? Photo by Patrick Jennings (patrick@synaptic.bc.ca), Copyright 1995, 96, 97 Whistler B. C. Canada Modeling, Rendering, and Lighting 1 A mental model?
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
The Light Field and Image-Based Rendering
 Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
A million pixels, a million polygons. Which is heavier? François X. Sillion. imagis* Grenoble, France
 A million pixels, a million polygons. Which is heavier? François X. Sillion imagis* Grenoble, France *A joint research project of CNRS, INRIA, INPG and UJF MAGIS Why this question? Evolution of processing
A million pixels, a million polygons. Which is heavier? François X. Sillion imagis* Grenoble, France *A joint research project of CNRS, INRIA, INPG and UJF MAGIS Why this question? Evolution of processing
Lecture 15: Image-Based Rendering and the Light Field. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Image-Based Rendering. Image-Based Rendering
 Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric info) as key component of model representation 1 What s Good about IBR Model acquisition
Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric info) as key component of model representation 1 What s Good about IBR Model acquisition
Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments
 Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments Nikos Komodakis and Georgios Tziritas Computer Science Department, University of Crete E-mails: {komod,
Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments Nikos Komodakis and Georgios Tziritas Computer Science Department, University of Crete E-mails: {komod,
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images
 Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Automatic 3-D 3 D Model Acquisition from Range Images. Michael K. Reed and Peter K. Allen Computer Science Department Columbia University
 Automatic 3-D 3 D Model Acquisition from Range Images Michael K. Reed and Peter K. Allen Computer Science Department Columbia University Introduction Objective: given an arbitrary object or scene, construct
Automatic 3-D 3 D Model Acquisition from Range Images Michael K. Reed and Peter K. Allen Computer Science Department Columbia University Introduction Objective: given an arbitrary object or scene, construct
Generating 3D Meshes from Range Data
 Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
Princeton University COS598B Lectures on 3D Modeling Generating 3D Meshes from Range Data Robert Kalnins Robert Osada Overview Range Images Optical Scanners Error sources and solutions Range Surfaces Mesh
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Geometry of Multiple views
 1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
Unwrapping of Urban Surface Models
 Unwrapping of Urban Surface Models Generation of virtual city models using laser altimetry and 2D GIS Abstract In this paper we present an approach for the geometric reconstruction of urban areas. It is
Unwrapping of Urban Surface Models Generation of virtual city models using laser altimetry and 2D GIS Abstract In this paper we present an approach for the geometric reconstruction of urban areas. It is
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Hybrid Rendering for Collaborative, Immersive Virtual Environments
 Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Image Based Rendering
 Image Based Rendering an overview Photographs We have tools that acquire and tools that display photographs at a convincing quality level 2 1 3 4 2 5 6 3 7 8 4 9 10 5 Photographs We have tools that acquire
Image Based Rendering an overview Photographs We have tools that acquire and tools that display photographs at a convincing quality level 2 1 3 4 2 5 6 3 7 8 4 9 10 5 Photographs We have tools that acquire
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
3D Modeling Using Planar Segments And Mesh Elements. Gene Yu and George Wolberg. City College / CUNY New York, NY 10031
 3D Modeling Using Planar Segments And Mesh Elements Ioannis Stamos Dept. of Computer Science Hunter College / CUNY New York, NY 10021 istamos@hunter.cuny.edu Gene Yu and George Wolberg Dept. of Computer
3D Modeling Using Planar Segments And Mesh Elements Ioannis Stamos Dept. of Computer Science Hunter College / CUNY New York, NY 10021 istamos@hunter.cuny.edu Gene Yu and George Wolberg Dept. of Computer
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Estimation of Camera Pose with Respect to Terrestrial LiDAR Data
 Estimation of Camera Pose with Respect to Terrestrial LiDAR Data Wei Guan Suya You Guan Pang Computer Science Department University of Southern California, Los Angeles, USA Abstract In this paper, we present
Estimation of Camera Pose with Respect to Terrestrial LiDAR Data Wei Guan Suya You Guan Pang Computer Science Department University of Southern California, Los Angeles, USA Abstract In this paper, we present
GRAPHICS TOOLS FOR THE GENERATION OF LARGE SCALE URBAN SCENES
 GRAPHICS TOOLS FOR THE GENERATION OF LARGE SCALE URBAN SCENES Norbert Haala, Martin Kada, Susanne Becker, Jan Böhm, Yahya Alshawabkeh University of Stuttgart, Institute for Photogrammetry, Germany Forename.Lastname@ifp.uni-stuttgart.de
GRAPHICS TOOLS FOR THE GENERATION OF LARGE SCALE URBAN SCENES Norbert Haala, Martin Kada, Susanne Becker, Jan Böhm, Yahya Alshawabkeh University of Stuttgart, Institute for Photogrammetry, Germany Forename.Lastname@ifp.uni-stuttgart.de
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
Modeling Light. Michal Havlik : Computational Photography Alexei Efros, CMU, Fall 2007
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 The Plenoptic Function Figure by Leonard McMillan Q: What is the set of all things that we can ever see? A: The
Volume Illumination and Segmentation
 Volume Illumination and Segmentation Computer Animation and Visualisation Lecture 13 Institute for Perception, Action & Behaviour School of Informatics Overview Volume illumination Segmentation Volume
Volume Illumination and Segmentation Computer Animation and Visualisation Lecture 13 Institute for Perception, Action & Behaviour School of Informatics Overview Volume illumination Segmentation Volume
Image-Based Rendering and Light Fields
 CS194-13: Advanced Computer Graphics Lecture #9 Image-Based Rendering University of California Berkeley Image-Based Rendering and Light Fields Lecture #9: Wednesday, September 30th 2009 Lecturer: Ravi
CS194-13: Advanced Computer Graphics Lecture #9 Image-Based Rendering University of California Berkeley Image-Based Rendering and Light Fields Lecture #9: Wednesday, September 30th 2009 Lecturer: Ravi
Talk plan. 3d model. Applications: cultural heritage 5/9/ d shape reconstruction from photographs: a Multi-View Stereo approach
 Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
More and More on Light Fields. Last Lecture
 More and More on Light Fields Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 4 Last Lecture Re-review with emphasis on radiometry Mosaics & Quicktime VR The Plenoptic function The main
More and More on Light Fields Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 4 Last Lecture Re-review with emphasis on radiometry Mosaics & Quicktime VR The Plenoptic function The main
Challenges and advances in interactive modeling
 Challenges and advances in interactive modeling Voicu Popescu, Elisha Sacks, Aliasgar Ganiji Computer Sciences Department, Purdue University, 250 N University Street, West Lafayette, IN 47907-2066 ABSTRACT
Challenges and advances in interactive modeling Voicu Popescu, Elisha Sacks, Aliasgar Ganiji Computer Sciences Department, Purdue University, 250 N University Street, West Lafayette, IN 47907-2066 ABSTRACT
Integrating Automated Range Registration with Multiview Geometry for the Photorealistic Modeling of Large-Scale Scenes
 Click here to download Manuscript: all.tex 1 1 1 1 1 0 1 0 1 Integrating Automated Range Registration with Multiview Geometry for the Photorealistic Modeling of Large-Scale Scenes Ioannis Stamos, Lingyun
Click here to download Manuscript: all.tex 1 1 1 1 1 0 1 0 1 Integrating Automated Range Registration with Multiview Geometry for the Photorealistic Modeling of Large-Scale Scenes Ioannis Stamos, Lingyun
History of computer graphics
 Ivan Sutherland (1963) - SKETCHPAD History of computer graphics CS 248 - Introduction to Computer Graphics Autumn quarter, 2006 Slides for September 26 lecture pop-up menus constraint-based drawing hierarchical
Ivan Sutherland (1963) - SKETCHPAD History of computer graphics CS 248 - Introduction to Computer Graphics Autumn quarter, 2006 Slides for September 26 lecture pop-up menus constraint-based drawing hierarchical
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
A million pixels, a million polygons: which is heavier?
 A million pixels, a million polygons: which is heavier? François X. Sillion To cite this version: François X. Sillion. A million pixels, a million polygons: which is heavier?. Eurographics 97, Sep 1997,
A million pixels, a million polygons: which is heavier? François X. Sillion To cite this version: François X. Sillion. A million pixels, a million polygons: which is heavier?. Eurographics 97, Sep 1997,
3D photography. Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15
 3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Semi-automatic range to range registration: a feature-based method
 Semi-automatic range to range registration: a feature-based method Chen Chao Graduate Center of CUNY, New York, NY, CChen@gc.cuny.edu Ioannis Stamos Hunter College and Graduate Center of CUNY, New York,
Semi-automatic range to range registration: a feature-based method Chen Chao Graduate Center of CUNY, New York, NY, CChen@gc.cuny.edu Ioannis Stamos Hunter College and Graduate Center of CUNY, New York,
Modeling Light. Slides from Alexei A. Efros and others
 Project 3 Results http://www.cs.brown.edu/courses/cs129/results/proj3/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj3/damoreno/ http://www.cs.brown.edu/courses/cs129/results/proj3/taox/ Stereo
Project 3 Results http://www.cs.brown.edu/courses/cs129/results/proj3/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj3/damoreno/ http://www.cs.brown.edu/courses/cs129/results/proj3/taox/ Stereo
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Department of Computer Engineering, Middle East Technical University, Ankara, Turkey, TR-06531
 INEXPENSIVE AND ROBUST 3D MODEL ACQUISITION SYSTEM FOR THREE-DIMENSIONAL MODELING OF SMALL ARTIFACTS Ulaş Yılmaz, Oğuz Özün, Burçak Otlu, Adem Mulayim, Volkan Atalay {ulas, oguz, burcak, adem, volkan}@ceng.metu.edu.tr
INEXPENSIVE AND ROBUST 3D MODEL ACQUISITION SYSTEM FOR THREE-DIMENSIONAL MODELING OF SMALL ARTIFACTS Ulaş Yılmaz, Oğuz Özün, Burçak Otlu, Adem Mulayim, Volkan Atalay {ulas, oguz, burcak, adem, volkan}@ceng.metu.edu.tr
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Three-Dimensional Viewing Hearn & Baker Chapter 7
 Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Model-Based Stereo. Chapter Motivation. The modeling system described in Chapter 5 allows the user to create a basic model of a
 96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Computational Photography
 Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
Active Scene Capturing for Image-Based Rendering with a Light Field Setup
 Active Scene Capturing for Image-Based Rendering with a Light Field Setup Cha Zhang and Tsuhan Chen Advanced Multimedia Processing Lab Technical Report AMP 03-02 March 2003 Electrical and Computer Engineering
Active Scene Capturing for Image-Based Rendering with a Light Field Setup Cha Zhang and Tsuhan Chen Advanced Multimedia Processing Lab Technical Report AMP 03-02 March 2003 Electrical and Computer Engineering
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Temporal Resolution. Flicker fusion threshold The frequency at which an intermittent light stimulus appears to be completely steady to the observer
 Temporal Resolution Flicker fusion threshold The frequency at which an intermittent light stimulus appears to be completely steady to the observer For the purposes of presenting moving images (animations),
Temporal Resolution Flicker fusion threshold The frequency at which an intermittent light stimulus appears to be completely steady to the observer For the purposes of presenting moving images (animations),
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Modeling Light. Michal Havlik
 Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 What is light? Electromagnetic radiation (EMR) moving along rays in space R( ) is EMR, measured in units of
Modeling Light Michal Havlik 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 What is light? Electromagnetic radiation (EMR) moving along rays in space R( ) is EMR, measured in units of
Mapping textures on 3D geometric model using reflectance image
 Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
SketchUp. SketchUp. Google SketchUp. Using SketchUp. The Tool Set
 Google Google is a 3D Modelling program which specialises in making computer generated representations of real-world objects, especially architectural, mechanical and building components, such as windows,
Google Google is a 3D Modelling program which specialises in making computer generated representations of real-world objects, especially architectural, mechanical and building components, such as windows,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Geometric Modeling. Bing-Yu Chen National Taiwan University The University of Tokyo
 Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo What are 3D Objects? 3D Object Representations What are 3D objects? The Graphics Process 3D Object Representations Raw
Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo What are 3D Objects? 3D Object Representations What are 3D objects? The Graphics Process 3D Object Representations Raw
Efficient Image-Based Methods for Rendering Soft Shadows. Hard vs. Soft Shadows. IBR good for soft shadows. Shadow maps
 Efficient Image-Based Methods for Rendering Soft Shadows Hard vs. Soft Shadows Maneesh Agrawala Ravi Ramamoorthi Alan Heirich Laurent Moll Pixar Animation Studios Stanford University Compaq Computer Corporation
Efficient Image-Based Methods for Rendering Soft Shadows Hard vs. Soft Shadows Maneesh Agrawala Ravi Ramamoorthi Alan Heirich Laurent Moll Pixar Animation Studios Stanford University Compaq Computer Corporation
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
IMAGE-BASED RENDERING
 IMAGE-BASED RENDERING 1. What is Image-Based Rendering? - The synthesis of new views of a scene from pre-recorded pictures.!"$#% "'&( )*+,-/.). #0 1 ' 2"&43+5+, 2. Why? (1) We really enjoy visual magic!
IMAGE-BASED RENDERING 1. What is Image-Based Rendering? - The synthesis of new views of a scene from pre-recorded pictures.!"$#% "'&( )*+,-/.). #0 1 ' 2"&43+5+, 2. Why? (1) We really enjoy visual magic!
Digitization of 3D Objects for Virtual Museum
 Digitization of 3D Objects for Virtual Museum Yi-Ping Hung 1, 2 and Chu-Song Chen 2 1 Department of Computer Science and Information Engineering National Taiwan University, Taipei, Taiwan 2 Institute of
Digitization of 3D Objects for Virtual Museum Yi-Ping Hung 1, 2 and Chu-Song Chen 2 1 Department of Computer Science and Information Engineering National Taiwan University, Taipei, Taiwan 2 Institute of
FAST PRODUCTION OF VIRTUAL REALITY CITY MODELS
 FAST PRODUCTION OF VIRTUAL REALITY CITY MODELS Claus Brenner and Norbert Haala Institute for Photogrammetry (ifp) University of Stuttgart Geschwister-Scholl-Straße 24, 70174 Stuttgart, Germany Ph.: +49-711-121-4097,
FAST PRODUCTION OF VIRTUAL REALITY CITY MODELS Claus Brenner and Norbert Haala Institute for Photogrammetry (ifp) University of Stuttgart Geschwister-Scholl-Straße 24, 70174 Stuttgart, Germany Ph.: +49-711-121-4097,
EF432. Introduction to spagetti and meatballs
 EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/ Instructors: L2501, T 6-8pm
EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/ Instructors: L2501, T 6-8pm
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Final Projects Are coming up fast! Undergrads
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Final Projects Are coming up fast! Undergrads
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Building Reliable 2D Maps from 3D Features
 Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Range Image Segmentation for Modeling and Object Detection in Urban Scenes
 Range Image Segmentation for Modeling and Object Detection in Urban Scenes Cecilia Chao Chen Ioannis Stamos Graduate Center / CUNY Hunter College / CUNY New York, NY 10016 New York, NY 10021 cchen@gc.cuny.edu
Range Image Segmentation for Modeling and Object Detection in Urban Scenes Cecilia Chao Chen Ioannis Stamos Graduate Center / CUNY Hunter College / CUNY New York, NY 10016 New York, NY 10021 cchen@gc.cuny.edu
Algorithms for Image-Based Rendering with an Application to Driving Simulation
 Algorithms for Image-Based Rendering with an Application to Driving Simulation George Drettakis GRAPHDECO/Inria Sophia Antipolis, Université Côte d Azur http://team.inria.fr/graphdeco Graphics for Driving
Algorithms for Image-Based Rendering with an Application to Driving Simulation George Drettakis GRAPHDECO/Inria Sophia Antipolis, Université Côte d Azur http://team.inria.fr/graphdeco Graphics for Driving
CS 354R: Computer Game Technology
 CS 354R: Computer Game Technology Texture and Environment Maps Fall 2018 Texture Mapping Problem: colors, normals, etc. are only specified at vertices How do we add detail between vertices without incurring
CS 354R: Computer Game Technology Texture and Environment Maps Fall 2018 Texture Mapping Problem: colors, normals, etc. are only specified at vertices How do we add detail between vertices without incurring
Stereo pairs from linear morphing
 Proc. of SPIE Vol. 3295, Stereoscopic Displays and Virtual Reality Systems V, ed. M T Bolas, S S Fisher, J O Merritt (Apr 1998) Copyright SPIE Stereo pairs from linear morphing David F. McAllister Multimedia
Proc. of SPIE Vol. 3295, Stereoscopic Displays and Virtual Reality Systems V, ed. M T Bolas, S S Fisher, J O Merritt (Apr 1998) Copyright SPIE Stereo pairs from linear morphing David F. McAllister Multimedia
Outline of Presentation. Introduction to Overwatch Geospatial Software Feature Analyst and LIDAR Analyst Software
 Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Topic 0. Introduction: What Is Computer Graphics? CSC 418/2504: Computer Graphics EF432. Today s Topics. What is Computer Graphics?
 EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/ Instructors: L0101, W 12-2pm
EF432 Introduction to spagetti and meatballs CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~karan/courses/418/ Instructors: L0101, W 12-2pm
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW