An efficient alternative approach for home furniture detection and localization by an autonomous mobile robot
|
|
|
- Jared McCarthy
- 5 years ago
- Views:
Transcription

, Nov 2015, Ixtapa, Mexico.")

1 An efficient alternative approach for home furniture detection and localization by an autonomous mobile robot Oscar Alonso-Ramirez, Yaser Aguas-Garcia, Antonio Marin-Hernandez, Homero V. Rios-Figueroa, Michel Devy To cite this version: Oscar Alonso-Ramirez, Yaser Aguas-Garcia, Antonio Marin-Hernandez, Homero V. Rios-Figueroa, Michel Devy. An efficient alternative approach for home furniture detection and localization by an autonomous mobile robot IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC 2015), Nov 2015, Ixtapa, Mexico IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC) 2015, < < /ROPEC >. <hal > HAL Id: hal Submitted on 22 Aug 2016 HAL is a multi-disciplinary open access archive for the deposit and dissemination of scientific research documents, whether they are published or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers. L archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
2
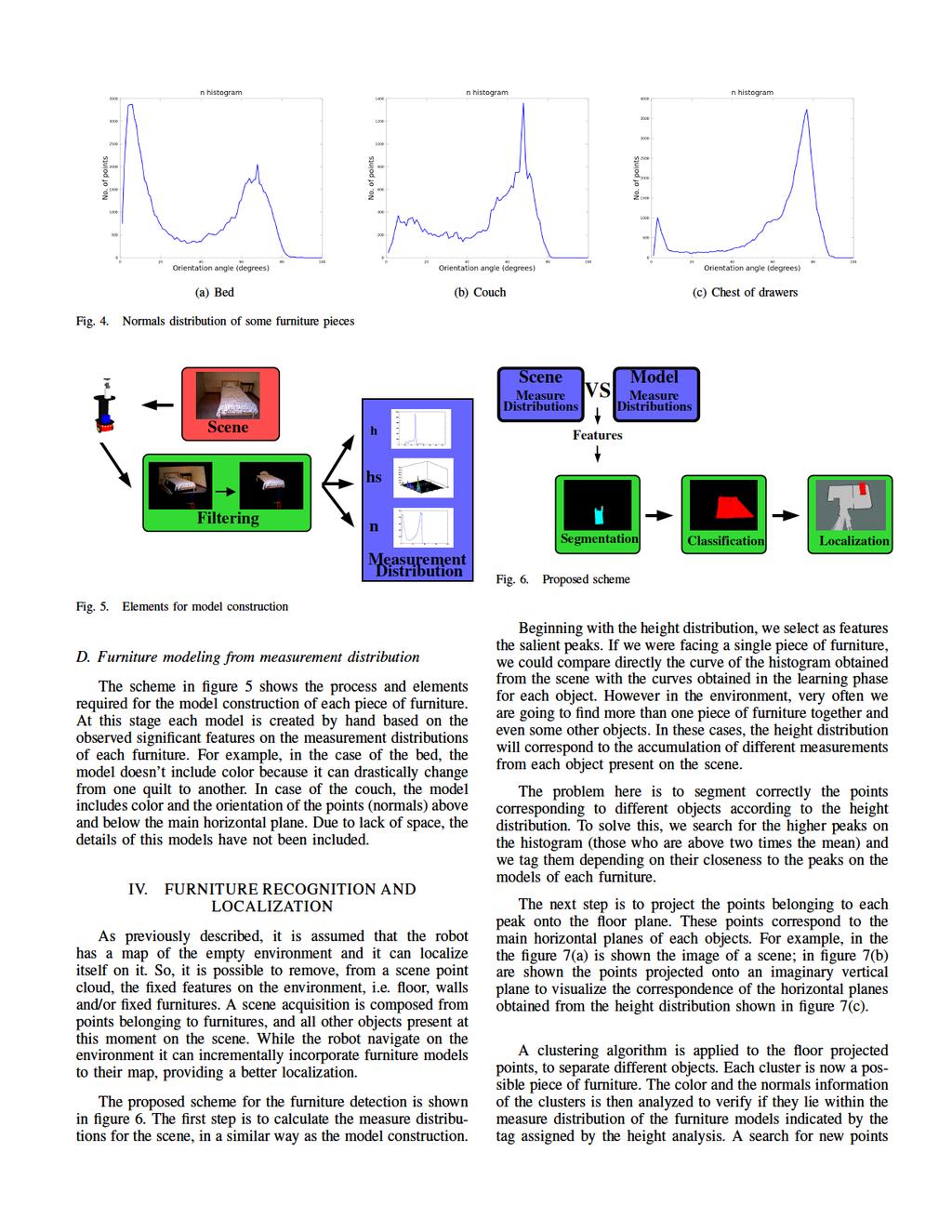
3 different reference frames (one or more for each sensor or actuator). Since the robot is localized, sensor data can be transformed from the sensor frame to the base-link frame of the robot, and then to the world reference frame. This paper is organized as follow; in next section (II), we present some of the most significant related works. In section III, we described the offline analysis and feature extraction process done for each piece of furniture, followed by section IV, where the proposed methodology to find each furniture in a scene is presented. In section V the results and evaluations of the proposed methodology are shown and finally in section VI, our conclusions and future work are described. II. RELATED WORK Many approaches have been exploited over the last few years for object detection. Most of these techniques have been focused on small objects, suitable for robot manipulation, however, not very efficient for furniture detection. According to Drost et al. [1], the diverse approaches for recognition of free-form objects in 3D, can be divided in global and local approaches. On one hand, global techniques are good for detecting shapes such as planes, cylinders and spheres; which can be a good approach for detecting furniture. However, they often need a heavy segmentation process of the scene and typically are neither very precise nor fast. On the other hand, the local approaches proved to be very efficient, but they depend on local surface information so they are sensitive to occlusions and the quality and resolution of the data acquired. Taking into account the advantages and disadvantages of both approaches, in [1] it is proposed a hybrid technique which creates a global model description using an oriented point pair feature and matches that model locally using a voting scheme similar to the Generalized Hough Transform. Salas-Moreno et al. [2] follow the proposed approach in [1] to detect objects (chairs and tables) and create an object oriented 3D SLAM with them. They report that their 3D object recognition approach lead to some advantages in terms of efficient and semantic scene description for real time SLAM. However, if this approach is used to detect other pieces of home furniture, its accuracy decreases, mainly because their characteristics could be very similar and the oriented points couples would be similar (i.e. the dining table, the small table and the bed, have very similar oriented point couples). In [3], Günther et al. present an approach to create a semantic map based on the recognition and localization of furniture objects. They use a model-based method for the recognition of the objects, where they first detect and classify planar regions and later they match the object with CAD model. The classification of the surfaces is done by a Web Ontology Language (OWL-DL) which contain the features and the rules that encode the structural model of the objects. Wünstel et al. [4] presented an object recognition system based on the object s prototypical geometry. They model the objects as a directed acyclic graph, where each node correspond to different segments of the objects at different heights. Each segment is characterized by height, minimum and maximum size and the relationships between them correspond to weighted edges. They were able to successfully identify chairs and tables within an office environment. Liu et al. [5] emphasizes the importance of an advance environment model as a requirement for an intelligent robot to perform its daily tasks. So, they propose the implementation of a semantic map using a parametric model to approximate the geometry of the perceived environment, with 3D object localization. Kasper et al. [6] deduce semantical information from the detection and localization of objects, based on their spatial relationships between them. In [7] a method is proposed for creating a household environment map with geometric models for environment manipulation. The object detection is performed by comparing clusters from the point cloud, with the database of objects models, using a version of ICP. The creation of the environment was successful, but all process were working asynchronously which makes it non-viable for real time applications. In [8], Rusu et al. propose an algorithm for building environment object maps for a kitchen environment. The objects modeled include cupboards, tables and drawers, all of them relevant for manipulation tasks. This work was later expanded in [9] to construct a hybrid map that contains the objects and uses semantic information to add triangular meshes used for collision avoidance. In [10] was presented an algorithm to identify and detect home furniture based on color, 3D position and 3D normals. Analyzing a small set of random points with a set of artificial neural networks, the method was able to avoid the processing of the complete frame, making the process run in real-time. This paper presents an alternative methodology based on fast an easy to compute measures distributions, which allows an efficient furniture detection and localization. III. FEATURES EXTRACTION AND MODEL GENERATION To distinguish one kind of furniture from another, it is necessary to compare relevant characteristics which allows to discriminate between them. However, looking to avoid time consuming and/or computationally inefficient processes, we propose to model each piece of furniture using easy to extract measurements, computed at each 3D point (similar to a local approach). Then, we model measures distribution for each piece of furniture, by extracting significant shapes over these distributions (similar to a global approach). At this stage, we are interested only in significant peaks on a given distribution, which will be modeled by Gaussian curves (equation 1) individually for each furniture. f (x) = p 1 (x µ) 2 exp There are three properties that we measure and analyze: the height, the color components HS (from HSV color space) and the normals. Although each of these features may not be totally discriminant by themselves, together they increase the possibility for a good classification. (1)
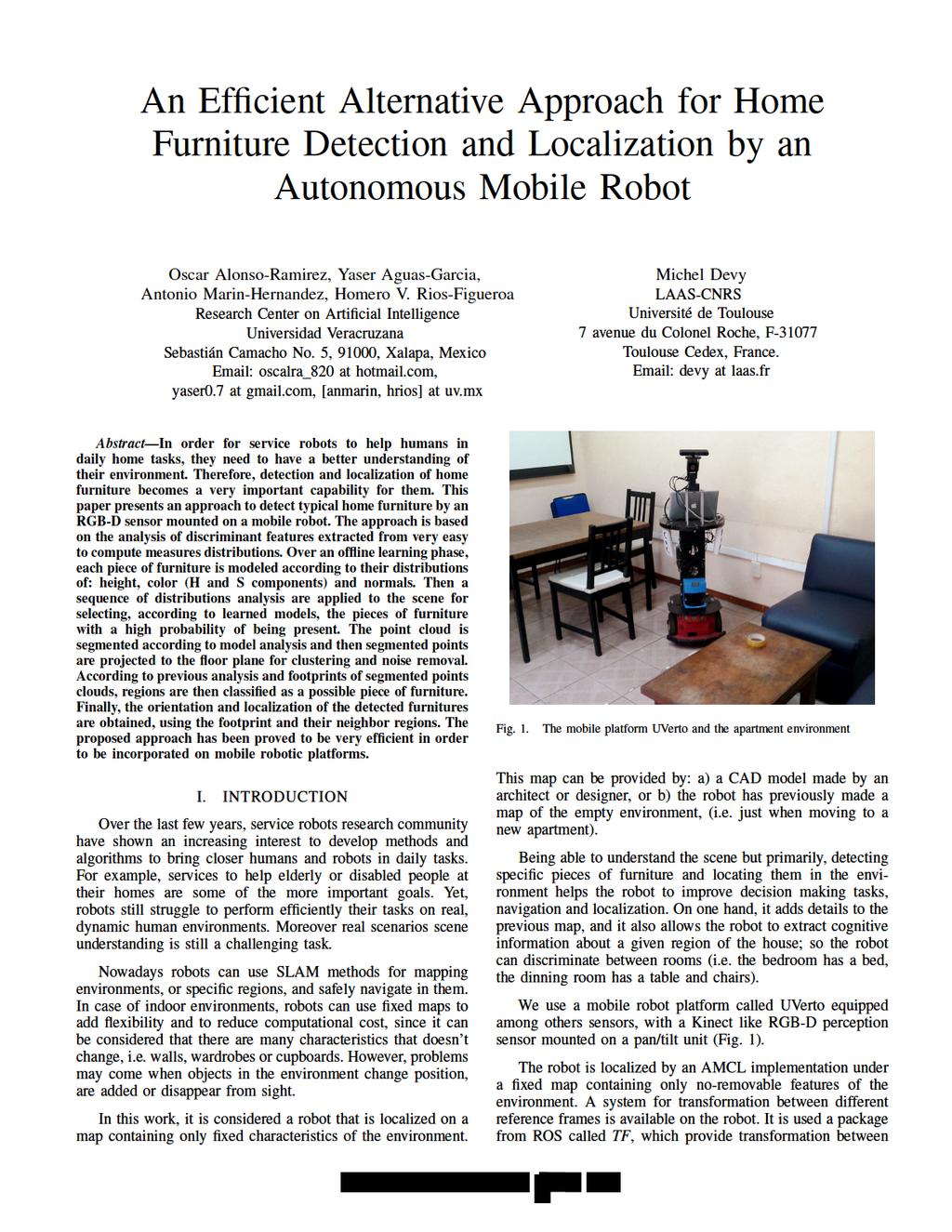
4 (a) The table. (b) The coach. (c) The chest of drawers. Fig. 2. Height distribution (histograms) of some furniture pieces (a) Table (b) Couch (c) Chest of drawers Fig. 3. HS color distribution of some furniture pieces In order to compute accurate measurements, we have acquired different point clouds at different angles (rotation along z axis, perpendicular to the floor) for each isolated object. We maximize the size of objects inside the field of view of the RGB-D camera, to have an upper limit, in the number of points of the object in the image, and to model them, under these conditions. A. Height Distribution The shapes of most of the furniture can be approximated by simple geometric forms (e.g. boxes, cylinders, etc.). However, the horizontal planes are a common characteristic for most of these objects; depending on the kind of furniture, these planes serve to place smaller items or to sit or lie on them. These horizontal planes are validated as a discriminating feature by the proposed distributions of heights measurements. In figure 2, we show the height distributions for three pieces of furniture found in our environment. The height distribution is obtained as an histogram of the heights of all points in the object, according to the floor reference frame. We use the TF package from ROS to transform the point cloud from the camera-view frame to the robot s base frame, eliminating any configuration of the pan/tilt unit (PTU), so that all the points belonging to an horizontal plane will have the same height. On figure 2, curves described only by points correspond to the measures at different points of view (angles) of the object, and continuous lines are the average of these curve distributions. The peaks on height distributions correspond to points over the main horizontal plane. While other shapes correspond to other characteristics (e.g. the vertical planes for the chest of drawers), at this stage we only model the highest peak (as a feature) on this distribution. B. Color Distribution Color is a popular characteristic for detecting or tracking an object, however it can be a very noisy characteristic. The color of an object, as it is perceived by a camera, can easily change with even the smallest changes in the illumination conditions. For the color distribution, a two-dimensional histogram has been built (figure 3). In order to have a good color representation we have choose to use the HSV color space, without considering the value (V) component. We approximate the higher areas of the histogram with a 2D Gaussian distribution and we use the projected ellipses to define the characteristic regions for the color of each piece of furniture. C. Normals Distribution Normals can be very useful to detect planes, but they can also be computationally very expensive. In this work we calculate the normals to obtain the orientation of a point (and the points next to it) with respect to the z axis. With those angles we can determinate if a point belongs to an horizontal or a vertical plane (Fig. 4).
5

6 (a) Scene (b) height projection the main horizontal planes detected in each scene. And in the last column are placed the detected pieces of furniture on their estimated position on the map. As it can be seen in the images of the sequence shown in the figure 8, at t 0 the robot detects a bed, places it on the map and continues it navigation. At time t i, the robot continues its navigation, detecting and adding models to the map. The process continues incrementally until time t f, where the last pieces of furniture are added and the map is completed. According to the obtained results it has been observed that the variations on the positions for a piece of furniture have a variation of less than 5cm, except for one piece who has a variation of 10cm. And the variations on the orientation for all the cases where inferior to 5%. Fig. 7. (c) Scene height histogram Horizontal planes found on a scene that could be part of the same object is performed. Depending on the model created for each piece of furniture, we cloud change the search area. For example, if the horizontal plane we are analyzing is tag as possible couch, we will search for points above the plane to find the back of the couch. If we are looking for a table, we will search for the table legs, below the plane. The color and orientation of these new points must be within the measurement distributions modeled for each piece of furniture; i.e. the points above a couch plane must have the same color and an orientation almost perpendicular to the horizontal plane. A final validation is performed by measuring the area of the projected points from each cluster. If this measure is less than a percentage of the area of the corresponding model, it is considered that the information is not enough to validate the model. Using the information from the adjusted model and its projection to the floor plane, the position on the map is obtained. V. RESULTS AND EVALUATION The experimental environment consist of a two pieces apartment: a bedroom and a dining/living room (sometimes referred as a T2 apartment). The bedroom contains a bed and a chest of drawers, and the dining/living room contains couches, a coffee table, a dining table and chairs. For the experiments, we had the robot navigating through both rooms. The figure 8 shows some results of one of the different sequences done by the robot. Each row correspond to a different time of the sequence, from t 0 for the upper row, t i for the rows in between to t f for the last row. The first column shows the RGB images obtained. The second column shows VI. CONCLUSIONS AND FUTURE WORK The proposed methodology has proved to be fast and efficient, so it can be consider as a good alternative to the other approaches. The errors obtained are within an aceptable range, considering a map constructed under a 5cm occupancy grid. This approach is now running on our mobile robot platform. So the robot is able to detect furniture pieces and place them correctly on the map. Processing time is very low, under.5s in the worst case, to locate and place all the furnitures given a complex scene, so the robot can do diverse task while is processing point clouds. As future work is proposed to increase the number and the types of furniture, as the size of the environment. Also it can be considered to add another measurements that could be discriminant characteristics. REFERENCES [1] B. Drost, M. Ulrich, N. Navab, and S. Ilic, Model globally, match locally: Efficient and robust 3d object recognition, in Computer Vision and Pattern Recognition (CVPR), 2010 IEEE Conference on, June 2010, pp [2] R. Salas-Moreno, R. Newcombe, H. Strasdat, P. Kelly, and A. Davison, Slam++: Simultaneous localisation and mapping at the level of objects, in Computer Vision and Pattern Recognition (CVPR), 2013 IEEE Conference on, June 2013, pp [3] M. Gnther, T. Wiemann, S. Albrecht, and J. Hertzberg, Modelbased furniture recognition for building semantic object maps, Artificial Intelligence, no. 0, pp., [Online]. Available: [4] M. Wunstel and R. Moratz, Automatic object recognition within an of.ce environment, in Computer and Robot Vision, Proceedings. First Canadian Conference on, May 2004, pp [5] Z. Liu, W. Wang, D. Chen, and G. von Wichert, A coherent semantic mapping system based on parametric environment abstraction and 3d object localization, in Mobile Robots (ECMR), 2013 European Conference on, Sept 2013, pp [6] A. Kasper, R. Jakel, and R. Dillmann, Using spatial relations of objects in real world scenes for scene structuring and scene understanding, in Advanced Robotics (ICAR), th International Conference on, June 2011, pp [7] Y. Kakiuchi, R. Ueda, K. Okada, and M. Inaba, Creating household environment map for environment manipulation using color range sensors on environment and robot, in Robotics and Automation (ICRA), 2011 IEEE International Conference on, May 2011, pp [8] R. B. Rusu, N. Blodow, Z. Marton, A. Soos, and M. Beetz, Towards 3d object maps for autonomous household robots, in Intelligent Robots and Systems, IROS IEEE/RSJ International Conference on. IEEE, 2007, pp




![IEEE, 2009, pp. 3601 3608. [10] O. Alonso-Ramirez, A.](/docs-images/80/82460145/images/7-5.jpg "Marin-Hernandez, M. Devy, and F.")

7 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) Fig. 8. Results from a sequence acquired by the robot [9] R. B. Rusu, Z. C. Marton, N. Blodow, A. Holzbach, and M. Beetz, Model-based and learned semantic object labeling in 3d point cloud maps of kitchen environments, in Intelligent Robots and Systems, IROS IEEE/RSJ International Conference on. IEEE, 2009, pp [10] O. Alonso-Ramirez, A. Marin-Hernandez, M. Devy, and F. Montes- Gonzalez, Indoor home furniture detection with rgb-d data for service robots, in Electronics, Communications and Computers (CONIELE- COMP), 2014 International Conference on, Feb 2014, pp
Indoor Home Furniture Detection with RGB-D Data for Service Robots
 Indoor Home Furniture Detection with RGB-D Data for Service Robots Oscar Alonso-Ramirez 1, Antonio Marin-Hernandez 1, Michel Devy 2 and Fernando M. Montes-Gonzalez 1. Abstract Home furniture detection
Indoor Home Furniture Detection with RGB-D Data for Service Robots Oscar Alonso-Ramirez 1, Antonio Marin-Hernandez 1, Michel Devy 2 and Fernando M. Montes-Gonzalez 1. Abstract Home furniture detection
Moveability and Collision Analysis for Fully-Parallel Manipulators
 Moveability and Collision Analysis for Fully-Parallel Manipulators Damien Chablat, Philippe Wenger To cite this version: Damien Chablat, Philippe Wenger. Moveability and Collision Analysis for Fully-Parallel
Moveability and Collision Analysis for Fully-Parallel Manipulators Damien Chablat, Philippe Wenger To cite this version: Damien Chablat, Philippe Wenger. Moveability and Collision Analysis for Fully-Parallel
HySCaS: Hybrid Stereoscopic Calibration Software
 HySCaS: Hybrid Stereoscopic Calibration Software Guillaume Caron, Damien Eynard To cite this version: Guillaume Caron, Damien Eynard. HySCaS: Hybrid Stereoscopic Calibration Software. SPIE newsroom in
HySCaS: Hybrid Stereoscopic Calibration Software Guillaume Caron, Damien Eynard To cite this version: Guillaume Caron, Damien Eynard. HySCaS: Hybrid Stereoscopic Calibration Software. SPIE newsroom in
BoxPlot++ Zeina Azmeh, Fady Hamoui, Marianne Huchard. To cite this version: HAL Id: lirmm
 BoxPlot++ Zeina Azmeh, Fady Hamoui, Marianne Huchard To cite this version: Zeina Azmeh, Fady Hamoui, Marianne Huchard. BoxPlot++. RR-11001, 2011. HAL Id: lirmm-00557222 https://hal-lirmm.ccsd.cnrs.fr/lirmm-00557222
BoxPlot++ Zeina Azmeh, Fady Hamoui, Marianne Huchard To cite this version: Zeina Azmeh, Fady Hamoui, Marianne Huchard. BoxPlot++. RR-11001, 2011. HAL Id: lirmm-00557222 https://hal-lirmm.ccsd.cnrs.fr/lirmm-00557222
Comparison of spatial indexes
 Comparison of spatial indexes Nathalie Andrea Barbosa Roa To cite this version: Nathalie Andrea Barbosa Roa. Comparison of spatial indexes. [Research Report] Rapport LAAS n 16631,., 13p. HAL
Comparison of spatial indexes Nathalie Andrea Barbosa Roa To cite this version: Nathalie Andrea Barbosa Roa. Comparison of spatial indexes. [Research Report] Rapport LAAS n 16631,., 13p. HAL
Fuzzy sensor for the perception of colour
 Fuzzy sensor for the perception of colour Eric Benoit, Laurent Foulloy, Sylvie Galichet, Gilles Mauris To cite this version: Eric Benoit, Laurent Foulloy, Sylvie Galichet, Gilles Mauris. Fuzzy sensor for
Fuzzy sensor for the perception of colour Eric Benoit, Laurent Foulloy, Sylvie Galichet, Gilles Mauris To cite this version: Eric Benoit, Laurent Foulloy, Sylvie Galichet, Gilles Mauris. Fuzzy sensor for
A Voronoi-Based Hybrid Meshing Method
 A Voronoi-Based Hybrid Meshing Method Jeanne Pellerin, Lévy Bruno, Guillaume Caumon To cite this version: Jeanne Pellerin, Lévy Bruno, Guillaume Caumon. A Voronoi-Based Hybrid Meshing Method. 2012. hal-00770939
A Voronoi-Based Hybrid Meshing Method Jeanne Pellerin, Lévy Bruno, Guillaume Caumon To cite this version: Jeanne Pellerin, Lévy Bruno, Guillaume Caumon. A Voronoi-Based Hybrid Meshing Method. 2012. hal-00770939
DSM GENERATION FROM STEREOSCOPIC IMAGERY FOR DAMAGE MAPPING, APPLICATION ON THE TOHOKU TSUNAMI
 DSM GENERATION FROM STEREOSCOPIC IMAGERY FOR DAMAGE MAPPING, APPLICATION ON THE TOHOKU TSUNAMI Cyrielle Guérin, Renaud Binet, Marc Pierrot-Deseilligny To cite this version: Cyrielle Guérin, Renaud Binet,
DSM GENERATION FROM STEREOSCOPIC IMAGERY FOR DAMAGE MAPPING, APPLICATION ON THE TOHOKU TSUNAMI Cyrielle Guérin, Renaud Binet, Marc Pierrot-Deseilligny To cite this version: Cyrielle Guérin, Renaud Binet,
Paris-Lille-3D: A Point Cloud Dataset for Urban Scene Segmentation and Classification
 Paris-Lille-3D: A Point Cloud Dataset for Urban Scene Segmentation and Classification Xavier Roynard, Jean-Emmanuel Deschaud, François Goulette To cite this version: Xavier Roynard, Jean-Emmanuel Deschaud,
Paris-Lille-3D: A Point Cloud Dataset for Urban Scene Segmentation and Classification Xavier Roynard, Jean-Emmanuel Deschaud, François Goulette To cite this version: Xavier Roynard, Jean-Emmanuel Deschaud,
Setup of epiphytic assistance systems with SEPIA
 Setup of epiphytic assistance systems with SEPIA Blandine Ginon, Stéphanie Jean-Daubias, Pierre-Antoine Champin, Marie Lefevre To cite this version: Blandine Ginon, Stéphanie Jean-Daubias, Pierre-Antoine
Setup of epiphytic assistance systems with SEPIA Blandine Ginon, Stéphanie Jean-Daubias, Pierre-Antoine Champin, Marie Lefevre To cite this version: Blandine Ginon, Stéphanie Jean-Daubias, Pierre-Antoine
A Fuzzy Approach for Background Subtraction
 A Fuzzy Approach for Background Subtraction Fida El Baf, Thierry Bouwmans, Bertrand Vachon To cite this version: Fida El Baf, Thierry Bouwmans, Bertrand Vachon. A Fuzzy Approach for Background Subtraction.
A Fuzzy Approach for Background Subtraction Fida El Baf, Thierry Bouwmans, Bertrand Vachon To cite this version: Fida El Baf, Thierry Bouwmans, Bertrand Vachon. A Fuzzy Approach for Background Subtraction.
Service Reconfiguration in the DANAH Assistive System
 Service Reconfiguration in the DANAH Assistive System Said Lankri, Pascal Berruet, Jean-Luc Philippe To cite this version: Said Lankri, Pascal Berruet, Jean-Luc Philippe. Service Reconfiguration in the
Service Reconfiguration in the DANAH Assistive System Said Lankri, Pascal Berruet, Jean-Luc Philippe To cite this version: Said Lankri, Pascal Berruet, Jean-Luc Philippe. Service Reconfiguration in the
Application of Artificial Neural Network to Predict Static Loads on an Aircraft Rib
 Application of Artificial Neural Network to Predict Static Loads on an Aircraft Rib Ramin Amali, Samson Cooper, Siamak Noroozi To cite this version: Ramin Amali, Samson Cooper, Siamak Noroozi. Application
Application of Artificial Neural Network to Predict Static Loads on an Aircraft Rib Ramin Amali, Samson Cooper, Siamak Noroozi To cite this version: Ramin Amali, Samson Cooper, Siamak Noroozi. Application
Scale Invariant Detection and Tracking of Elongated Structures
 Scale Invariant Detection and Tracking of Elongated Structures Amaury Nègre, James L. Crowley, Christian Laugier To cite this version: Amaury Nègre, James L. Crowley, Christian Laugier. Scale Invariant
Scale Invariant Detection and Tracking of Elongated Structures Amaury Nègre, James L. Crowley, Christian Laugier To cite this version: Amaury Nègre, James L. Crowley, Christian Laugier. Scale Invariant
Prototype Selection Methods for On-line HWR
 Prototype Selection Methods for On-line HWR Jakob Sternby To cite this version: Jakob Sternby. Prototype Selection Methods for On-line HWR. Guy Lorette. Tenth International Workshop on Frontiers in Handwriting
Prototype Selection Methods for On-line HWR Jakob Sternby To cite this version: Jakob Sternby. Prototype Selection Methods for On-line HWR. Guy Lorette. Tenth International Workshop on Frontiers in Handwriting
Tacked Link List - An Improved Linked List for Advance Resource Reservation
 Tacked Link List - An Improved Linked List for Advance Resource Reservation Li-Bing Wu, Jing Fan, Lei Nie, Bing-Yi Liu To cite this version: Li-Bing Wu, Jing Fan, Lei Nie, Bing-Yi Liu. Tacked Link List
Tacked Link List - An Improved Linked List for Advance Resource Reservation Li-Bing Wu, Jing Fan, Lei Nie, Bing-Yi Liu To cite this version: Li-Bing Wu, Jing Fan, Lei Nie, Bing-Yi Liu. Tacked Link List
Workspace and joint space analysis of the 3-RPS parallel robot
 Workspace and joint space analysis of the 3-RPS parallel robot Damien Chablat, Ranjan Jha, Fabrice Rouillier, Guillaume Moroz To cite this version: Damien Chablat, Ranjan Jha, Fabrice Rouillier, Guillaume
Workspace and joint space analysis of the 3-RPS parallel robot Damien Chablat, Ranjan Jha, Fabrice Rouillier, Guillaume Moroz To cite this version: Damien Chablat, Ranjan Jha, Fabrice Rouillier, Guillaume
Linked data from your pocket: The Android RDFContentProvider
 Linked data from your pocket: The Android RDFContentProvider Jérôme David, Jérôme Euzenat To cite this version: Jérôme David, Jérôme Euzenat. Linked data from your pocket: The Android RDFContentProvider.
Linked data from your pocket: The Android RDFContentProvider Jérôme David, Jérôme Euzenat To cite this version: Jérôme David, Jérôme Euzenat. Linked data from your pocket: The Android RDFContentProvider.
Fast and precise kinematic skeleton extraction of 3D dynamic meshes
 Fast and precise kinematic skeleton extraction of 3D dynamic meshes Julien Tierny, Jean-Philippe Vandeborre, Mohamed Daoudi To cite this version: Julien Tierny, Jean-Philippe Vandeborre, Mohamed Daoudi.
Fast and precise kinematic skeleton extraction of 3D dynamic meshes Julien Tierny, Jean-Philippe Vandeborre, Mohamed Daoudi To cite this version: Julien Tierny, Jean-Philippe Vandeborre, Mohamed Daoudi.
Fault-Tolerant Storage Servers for the Databases of Redundant Web Servers in a Computing Grid
 Fault-Tolerant s for the Databases of Redundant Web Servers in a Computing Grid Minhwan Ok To cite this version: Minhwan Ok. Fault-Tolerant s for the Databases of Redundant Web Servers in a Computing Grid.
Fault-Tolerant s for the Databases of Redundant Web Servers in a Computing Grid Minhwan Ok To cite this version: Minhwan Ok. Fault-Tolerant s for the Databases of Redundant Web Servers in a Computing Grid.
A Practical Approach for 3D Model Indexing by combining Local and Global Invariants
 A Practical Approach for 3D Model Indexing by combining Local and Global Invariants Jean-Philippe Vandeborre, Vincent Couillet, Mohamed Daoudi To cite this version: Jean-Philippe Vandeborre, Vincent Couillet,
A Practical Approach for 3D Model Indexing by combining Local and Global Invariants Jean-Philippe Vandeborre, Vincent Couillet, Mohamed Daoudi To cite this version: Jean-Philippe Vandeborre, Vincent Couillet,
Real-time FEM based control of soft surgical robots
 Real-time FEM based control of soft surgical robots Frederick Largilliere, Eulalie Coevoet, Laurent Grisoni, Christian Duriez To cite this version: Frederick Largilliere, Eulalie Coevoet, Laurent Grisoni,
Real-time FEM based control of soft surgical robots Frederick Largilliere, Eulalie Coevoet, Laurent Grisoni, Christian Duriez To cite this version: Frederick Largilliere, Eulalie Coevoet, Laurent Grisoni,
A Methodology for Improving Software Design Lifecycle in Embedded Control Systems
 A Methodology for Improving Software Design Lifecycle in Embedded Control Systems Mohamed El Mongi Ben Gaïd, Rémy Kocik, Yves Sorel, Rédha Hamouche To cite this version: Mohamed El Mongi Ben Gaïd, Rémy
A Methodology for Improving Software Design Lifecycle in Embedded Control Systems Mohamed El Mongi Ben Gaïd, Rémy Kocik, Yves Sorel, Rédha Hamouche To cite this version: Mohamed El Mongi Ben Gaïd, Rémy
Mokka, main guidelines and future
 Mokka, main guidelines and future P. Mora De Freitas To cite this version: P. Mora De Freitas. Mokka, main guidelines and future. H. Videau; J-C. Brient. International Conference on Linear Collider, Apr
Mokka, main guidelines and future P. Mora De Freitas To cite this version: P. Mora De Freitas. Mokka, main guidelines and future. H. Videau; J-C. Brient. International Conference on Linear Collider, Apr
Comparison of radiosity and ray-tracing methods for coupled rooms
 Comparison of radiosity and ray-tracing methods for coupled rooms Jimmy Dondaine, Alain Le Bot, Joel Rech, Sébastien Mussa Peretto To cite this version: Jimmy Dondaine, Alain Le Bot, Joel Rech, Sébastien
Comparison of radiosity and ray-tracing methods for coupled rooms Jimmy Dondaine, Alain Le Bot, Joel Rech, Sébastien Mussa Peretto To cite this version: Jimmy Dondaine, Alain Le Bot, Joel Rech, Sébastien
Multimedia CTI Services for Telecommunication Systems
 Multimedia CTI Services for Telecommunication Systems Xavier Scharff, Pascal Lorenz, Zoubir Mammeri To cite this version: Xavier Scharff, Pascal Lorenz, Zoubir Mammeri. Multimedia CTI Services for Telecommunication
Multimedia CTI Services for Telecommunication Systems Xavier Scharff, Pascal Lorenz, Zoubir Mammeri To cite this version: Xavier Scharff, Pascal Lorenz, Zoubir Mammeri. Multimedia CTI Services for Telecommunication
Natural Language Based User Interface for On-Demand Service Composition
 Natural Language Based User Interface for On-Demand Service Composition Marcel Cremene, Florin-Claudiu Pop, Stéphane Lavirotte, Jean-Yves Tigli To cite this version: Marcel Cremene, Florin-Claudiu Pop,
Natural Language Based User Interface for On-Demand Service Composition Marcel Cremene, Florin-Claudiu Pop, Stéphane Lavirotte, Jean-Yves Tigli To cite this version: Marcel Cremene, Florin-Claudiu Pop,
A case-based reasoning approach for invoice structure extraction
 A case-based reasoning approach for invoice structure extraction Hatem Hamza, Yolande Belaïd, Abdel Belaïd To cite this version: Hatem Hamza, Yolande Belaïd, Abdel Belaïd. A case-based reasoning approach
A case-based reasoning approach for invoice structure extraction Hatem Hamza, Yolande Belaïd, Abdel Belaïd To cite this version: Hatem Hamza, Yolande Belaïd, Abdel Belaïd. A case-based reasoning approach
Light field video dataset captured by a R8 Raytrix camera (with disparity maps)
") Light field video dataset captured by a R8 Raytrix camera (with disparity maps) Laurent Guillo, Xiaoran Jiang, Gauthier Lafruit, Christine Guillemot To cite this version: Laurent Guillo, Xiaoran Jiang,
Light field video dataset captured by a R8 Raytrix camera (with disparity maps) Laurent Guillo, Xiaoran Jiang, Gauthier Lafruit, Christine Guillemot To cite this version: Laurent Guillo, Xiaoran Jiang,
An FCA Framework for Knowledge Discovery in SPARQL Query Answers
 An FCA Framework for Knowledge Discovery in SPARQL Query Answers Melisachew Wudage Chekol, Amedeo Napoli To cite this version: Melisachew Wudage Chekol, Amedeo Napoli. An FCA Framework for Knowledge Discovery
An FCA Framework for Knowledge Discovery in SPARQL Query Answers Melisachew Wudage Chekol, Amedeo Napoli To cite this version: Melisachew Wudage Chekol, Amedeo Napoli. An FCA Framework for Knowledge Discovery
An Experimental Assessment of the 2D Visibility Complex
 An Experimental Assessment of the D Visibility Complex Hazel Everett, Sylvain Lazard, Sylvain Petitjean, Linqiao Zhang To cite this version: Hazel Everett, Sylvain Lazard, Sylvain Petitjean, Linqiao Zhang.
An Experimental Assessment of the D Visibility Complex Hazel Everett, Sylvain Lazard, Sylvain Petitjean, Linqiao Zhang To cite this version: Hazel Everett, Sylvain Lazard, Sylvain Petitjean, Linqiao Zhang.
Regularization parameter estimation for non-negative hyperspectral image deconvolution:supplementary material
 Regularization parameter estimation for non-negative hyperspectral image deconvolution:supplementary material Yingying Song, David Brie, El-Hadi Djermoune, Simon Henrot To cite this version: Yingying Song,
Regularization parameter estimation for non-negative hyperspectral image deconvolution:supplementary material Yingying Song, David Brie, El-Hadi Djermoune, Simon Henrot To cite this version: Yingying Song,
ROBUST MOTION SEGMENTATION FOR HIGH DEFINITION VIDEO SEQUENCES USING A FAST MULTI-RESOLUTION MOTION ESTIMATION BASED ON SPATIO-TEMPORAL TUBES
 ROBUST MOTION SEGMENTATION FOR HIGH DEFINITION VIDEO SEQUENCES USING A FAST MULTI-RESOLUTION MOTION ESTIMATION BASED ON SPATIO-TEMPORAL TUBES Olivier Brouard, Fabrice Delannay, Vincent Ricordel, Dominique
ROBUST MOTION SEGMENTATION FOR HIGH DEFINITION VIDEO SEQUENCES USING A FAST MULTI-RESOLUTION MOTION ESTIMATION BASED ON SPATIO-TEMPORAL TUBES Olivier Brouard, Fabrice Delannay, Vincent Ricordel, Dominique
A million pixels, a million polygons: which is heavier?
 A million pixels, a million polygons: which is heavier? François X. Sillion To cite this version: François X. Sillion. A million pixels, a million polygons: which is heavier?. Eurographics 97, Sep 1997,
A million pixels, a million polygons: which is heavier? François X. Sillion To cite this version: François X. Sillion. A million pixels, a million polygons: which is heavier?. Eurographics 97, Sep 1997,
A case-based reasoning approach for unknown class invoice processing
 A case-based reasoning approach for unknown class invoice processing Hatem Hamza, Yolande Belaïd, Abdel Belaïd To cite this version: Hatem Hamza, Yolande Belaïd, Abdel Belaïd. A case-based reasoning approach
A case-based reasoning approach for unknown class invoice processing Hatem Hamza, Yolande Belaïd, Abdel Belaïd To cite this version: Hatem Hamza, Yolande Belaïd, Abdel Belaïd. A case-based reasoning approach
The Proportional Colouring Problem: Optimizing Buffers in Radio Mesh Networks
 The Proportional Colouring Problem: Optimizing Buffers in Radio Mesh Networks Florian Huc, Claudia Linhares Sales, Hervé Rivano To cite this version: Florian Huc, Claudia Linhares Sales, Hervé Rivano.
The Proportional Colouring Problem: Optimizing Buffers in Radio Mesh Networks Florian Huc, Claudia Linhares Sales, Hervé Rivano To cite this version: Florian Huc, Claudia Linhares Sales, Hervé Rivano.
Real-Time Collision Detection for Dynamic Virtual Environments
 Real-Time Collision Detection for Dynamic Virtual Environments Gabriel Zachmann, Matthias Teschner, Stefan Kimmerle, Bruno Heidelberger, Laks Raghupathi, Arnulph Fuhrmann To cite this version: Gabriel
Real-Time Collision Detection for Dynamic Virtual Environments Gabriel Zachmann, Matthias Teschner, Stefan Kimmerle, Bruno Heidelberger, Laks Raghupathi, Arnulph Fuhrmann To cite this version: Gabriel
Open Digital Forms. Hiep Le, Thomas Rebele, Fabian Suchanek. HAL Id: hal
 Open Digital Forms Hiep Le, Thomas Rebele, Fabian Suchanek To cite this version: Hiep Le, Thomas Rebele, Fabian Suchanek. Open Digital Forms. Research and Advanced Technology for Digital Libraries - 20th
Open Digital Forms Hiep Le, Thomas Rebele, Fabian Suchanek To cite this version: Hiep Le, Thomas Rebele, Fabian Suchanek. Open Digital Forms. Research and Advanced Technology for Digital Libraries - 20th
Spectral Active Clustering of Remote Sensing Images
 Spectral Active Clustering of Remote Sensing Images Zifeng Wang, Gui-Song Xia, Caiming Xiong, Liangpei Zhang To cite this version: Zifeng Wang, Gui-Song Xia, Caiming Xiong, Liangpei Zhang. Spectral Active
Spectral Active Clustering of Remote Sensing Images Zifeng Wang, Gui-Song Xia, Caiming Xiong, Liangpei Zhang To cite this version: Zifeng Wang, Gui-Song Xia, Caiming Xiong, Liangpei Zhang. Spectral Active
Quality of Service Enhancement by Using an Integer Bloom Filter Based Data Deduplication Mechanism in the Cloud Storage Environment
 Quality of Service Enhancement by Using an Integer Bloom Filter Based Data Deduplication Mechanism in the Cloud Storage Environment Kuo-Qin Yan, Yung-Hsiang Su, Hsin-Met Chuan, Shu-Ching Wang, Bo-Wei Chen
Quality of Service Enhancement by Using an Integer Bloom Filter Based Data Deduplication Mechanism in the Cloud Storage Environment Kuo-Qin Yan, Yung-Hsiang Su, Hsin-Met Chuan, Shu-Ching Wang, Bo-Wei Chen
Reverse-engineering of UML 2.0 Sequence Diagrams from Execution Traces
 Reverse-engineering of UML 2.0 Sequence Diagrams from Execution Traces Romain Delamare, Benoit Baudry, Yves Le Traon To cite this version: Romain Delamare, Benoit Baudry, Yves Le Traon. Reverse-engineering
Reverse-engineering of UML 2.0 Sequence Diagrams from Execution Traces Romain Delamare, Benoit Baudry, Yves Le Traon To cite this version: Romain Delamare, Benoit Baudry, Yves Le Traon. Reverse-engineering
A Face Recognition Based Multiplayer Mobile Game Application
 A Face Recognition Based Multiplayer Mobile Game Application Ugur Demir, Esam Ghaleb, Hazım Ekenel To cite this version: Ugur Demir, Esam Ghaleb, Hazım Ekenel. A Face Recognition Based Multiplayer Mobile
A Face Recognition Based Multiplayer Mobile Game Application Ugur Demir, Esam Ghaleb, Hazım Ekenel To cite this version: Ugur Demir, Esam Ghaleb, Hazım Ekenel. A Face Recognition Based Multiplayer Mobile
QuickRanking: Fast Algorithm For Sorting And Ranking Data
 QuickRanking: Fast Algorithm For Sorting And Ranking Data Laurent Ott To cite this version: Laurent Ott. QuickRanking: Fast Algorithm For Sorting And Ranking Data. Fichiers produits par l auteur. 2015.
QuickRanking: Fast Algorithm For Sorting And Ranking Data Laurent Ott To cite this version: Laurent Ott. QuickRanking: Fast Algorithm For Sorting And Ranking Data. Fichiers produits par l auteur. 2015.
Lossless and Lossy Minimal Redundancy Pyramidal Decomposition for Scalable Image Compression Technique
 Lossless and Lossy Minimal Redundancy Pyramidal Decomposition for Scalable Image Compression Technique Marie Babel, Olivier Déforges To cite this version: Marie Babel, Olivier Déforges. Lossless and Lossy
Lossless and Lossy Minimal Redundancy Pyramidal Decomposition for Scalable Image Compression Technique Marie Babel, Olivier Déforges To cite this version: Marie Babel, Olivier Déforges. Lossless and Lossy
How to simulate a volume-controlled flooding with mathematical morphology operators?
 How to simulate a volume-controlled flooding with mathematical morphology operators? Serge Beucher To cite this version: Serge Beucher. How to simulate a volume-controlled flooding with mathematical morphology
How to simulate a volume-controlled flooding with mathematical morphology operators? Serge Beucher To cite this version: Serge Beucher. How to simulate a volume-controlled flooding with mathematical morphology
The Connectivity Order of Links
 The Connectivity Order of Links Stéphane Dugowson To cite this version: Stéphane Dugowson. The Connectivity Order of Links. 4 pages, 2 figures. 2008. HAL Id: hal-00275717 https://hal.archives-ouvertes.fr/hal-00275717
The Connectivity Order of Links Stéphane Dugowson To cite this version: Stéphane Dugowson. The Connectivity Order of Links. 4 pages, 2 figures. 2008. HAL Id: hal-00275717 https://hal.archives-ouvertes.fr/hal-00275717
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gyuri Dorkó, Cordelia Schmid To cite this version: Gyuri Dorkó, Cordelia Schmid. Selection of Scale-Invariant Parts for Object Class Recognition.
Selection of Scale-Invariant Parts for Object Class Recognition Gyuri Dorkó, Cordelia Schmid To cite this version: Gyuri Dorkó, Cordelia Schmid. Selection of Scale-Invariant Parts for Object Class Recognition.
Branch-and-price algorithms for the Bi-Objective Vehicle Routing Problem with Time Windows
 Branch-and-price algorithms for the Bi-Objective Vehicle Routing Problem with Time Windows Estèle Glize, Nicolas Jozefowiez, Sandra Ulrich Ngueveu To cite this version: Estèle Glize, Nicolas Jozefowiez,
Branch-and-price algorithms for the Bi-Objective Vehicle Routing Problem with Time Windows Estèle Glize, Nicolas Jozefowiez, Sandra Ulrich Ngueveu To cite this version: Estèle Glize, Nicolas Jozefowiez,
Assisted Policy Management for SPARQL Endpoints Access Control
 Assisted Policy Management for SPARQL Endpoints Access Control Luca Costabello, Serena Villata, Iacopo Vagliano, Fabien Gandon To cite this version: Luca Costabello, Serena Villata, Iacopo Vagliano, Fabien
Assisted Policy Management for SPARQL Endpoints Access Control Luca Costabello, Serena Villata, Iacopo Vagliano, Fabien Gandon To cite this version: Luca Costabello, Serena Villata, Iacopo Vagliano, Fabien
THE KINEMATIC AND INERTIAL SOIL-PILE INTERACTIONS: CENTRIFUGE MODELLING
 THE KINEMATIC AND INERTIAL SOIL-PILE INTERACTIONS: CENTRIFUGE MODELLING Nawel Chenaf, Jean-Louis Chazelas To cite this version: Nawel Chenaf, Jean-Louis Chazelas. THE KINEMATIC AND INERTIAL SOIL-PILE INTER-
THE KINEMATIC AND INERTIAL SOIL-PILE INTERACTIONS: CENTRIFUGE MODELLING Nawel Chenaf, Jean-Louis Chazelas To cite this version: Nawel Chenaf, Jean-Louis Chazelas. THE KINEMATIC AND INERTIAL SOIL-PILE INTER-
Kinematic skeleton extraction based on motion boundaries for 3D dynamic meshes
 Kinematic skeleton extraction based on motion boundaries for 3D dynamic meshes Halim Benhabiles, Guillaume Lavoué, Jean-Philippe Vandeborre, Mohamed Daoudi To cite this version: Halim Benhabiles, Guillaume
Kinematic skeleton extraction based on motion boundaries for 3D dynamic meshes Halim Benhabiles, Guillaume Lavoué, Jean-Philippe Vandeborre, Mohamed Daoudi To cite this version: Halim Benhabiles, Guillaume
Structuring the First Steps of Requirements Elicitation
 Structuring the First Steps of Requirements Elicitation Jeanine Souquières, Maritta Heisel To cite this version: Jeanine Souquières, Maritta Heisel. Structuring the First Steps of Requirements Elicitation.
Structuring the First Steps of Requirements Elicitation Jeanine Souquières, Maritta Heisel To cite this version: Jeanine Souquières, Maritta Heisel. Structuring the First Steps of Requirements Elicitation.
Relabeling nodes according to the structure of the graph
 Relabeling nodes according to the structure of the graph Ronan Hamon, Céline Robardet, Pierre Borgnat, Patrick Flandrin To cite this version: Ronan Hamon, Céline Robardet, Pierre Borgnat, Patrick Flandrin.
Relabeling nodes according to the structure of the graph Ronan Hamon, Céline Robardet, Pierre Borgnat, Patrick Flandrin To cite this version: Ronan Hamon, Céline Robardet, Pierre Borgnat, Patrick Flandrin.
Deformetrica: a software for statistical analysis of anatomical shapes
 Deformetrica: a software for statistical analysis of anatomical shapes Alexandre Routier, Marcel Prastawa, Benjamin Charlier, Cédric Doucet, Joan Alexis Glaunès, Stanley Durrleman To cite this version:
Deformetrica: a software for statistical analysis of anatomical shapes Alexandre Routier, Marcel Prastawa, Benjamin Charlier, Cédric Doucet, Joan Alexis Glaunès, Stanley Durrleman To cite this version:
Learning Object Representations for Visual Object Class Recognition
 Learning Object Representations for Visual Object Class Recognition Marcin Marszalek, Cordelia Schmid, Hedi Harzallah, Joost Van de Weijer To cite this version: Marcin Marszalek, Cordelia Schmid, Hedi
Learning Object Representations for Visual Object Class Recognition Marcin Marszalek, Cordelia Schmid, Hedi Harzallah, Joost Van de Weijer To cite this version: Marcin Marszalek, Cordelia Schmid, Hedi
Motion-based obstacle detection and tracking for car driving assistance
 Motion-based obstacle detection and tracking for car driving assistance G. Lefaix, E. Marchand, Patrick Bouthemy To cite this version: G. Lefaix, E. Marchand, Patrick Bouthemy. Motion-based obstacle detection
Motion-based obstacle detection and tracking for car driving assistance G. Lefaix, E. Marchand, Patrick Bouthemy To cite this version: G. Lefaix, E. Marchand, Patrick Bouthemy. Motion-based obstacle detection
Accurate Conversion of Earth-Fixed Earth-Centered Coordinates to Geodetic Coordinates
 Accurate Conversion of Earth-Fixed Earth-Centered Coordinates to Geodetic Coordinates Karl Osen To cite this version: Karl Osen. Accurate Conversion of Earth-Fixed Earth-Centered Coordinates to Geodetic
Accurate Conversion of Earth-Fixed Earth-Centered Coordinates to Geodetic Coordinates Karl Osen To cite this version: Karl Osen. Accurate Conversion of Earth-Fixed Earth-Centered Coordinates to Geodetic
SDLS: a Matlab package for solving conic least-squares problems
 SDLS: a Matlab package for solving conic least-squares problems Didier Henrion, Jérôme Malick To cite this version: Didier Henrion, Jérôme Malick. SDLS: a Matlab package for solving conic least-squares
SDLS: a Matlab package for solving conic least-squares problems Didier Henrion, Jérôme Malick To cite this version: Didier Henrion, Jérôme Malick. SDLS: a Matlab package for solving conic least-squares
From medical imaging to numerical simulations
 From medical imaging to numerical simulations Christophe Prud Homme, Vincent Chabannes, Marcela Szopos, Alexandre Ancel, Julien Jomier To cite this version: Christophe Prud Homme, Vincent Chabannes, Marcela
From medical imaging to numerical simulations Christophe Prud Homme, Vincent Chabannes, Marcela Szopos, Alexandre Ancel, Julien Jomier To cite this version: Christophe Prud Homme, Vincent Chabannes, Marcela
Computing and maximizing the exact reliability of wireless backhaul networks
 Computing and maximizing the exact reliability of wireless backhaul networks David Coudert, James Luedtke, Eduardo Moreno, Konstantinos Priftis To cite this version: David Coudert, James Luedtke, Eduardo
Computing and maximizing the exact reliability of wireless backhaul networks David Coudert, James Luedtke, Eduardo Moreno, Konstantinos Priftis To cite this version: David Coudert, James Luedtke, Eduardo
Automatic indexing of comic page images for query by example based focused content retrieval
 Automatic indexing of comic page images for query by example based focused content retrieval Muhammad Muzzamil Luqman, Hoang Nam Ho, Jean-Christophe Burie, Jean-Marc Ogier To cite this version: Muhammad
Automatic indexing of comic page images for query by example based focused content retrieval Muhammad Muzzamil Luqman, Hoang Nam Ho, Jean-Christophe Burie, Jean-Marc Ogier To cite this version: Muhammad
YAM++ : A multi-strategy based approach for Ontology matching task
 YAM++ : A multi-strategy based approach for Ontology matching task Duy Hoa Ngo, Zohra Bellahsene To cite this version: Duy Hoa Ngo, Zohra Bellahsene. YAM++ : A multi-strategy based approach for Ontology
YAM++ : A multi-strategy based approach for Ontology matching task Duy Hoa Ngo, Zohra Bellahsene To cite this version: Duy Hoa Ngo, Zohra Bellahsene. YAM++ : A multi-strategy based approach for Ontology
DANCer: Dynamic Attributed Network with Community Structure Generator
 DANCer: Dynamic Attributed Network with Community Structure Generator Oualid Benyahia, Christine Largeron, Baptiste Jeudy, Osmar Zaïane To cite this version: Oualid Benyahia, Christine Largeron, Baptiste
DANCer: Dynamic Attributed Network with Community Structure Generator Oualid Benyahia, Christine Largeron, Baptiste Jeudy, Osmar Zaïane To cite this version: Oualid Benyahia, Christine Largeron, Baptiste
Inverting the Reflectance Map with Binary Search
 Inverting the Reflectance Map with Binary Search François Faure To cite this version: François Faure. Inverting the Reflectance Map with Binary Search. Lecture Notes in Computer Science, Springer, 1995,
Inverting the Reflectance Map with Binary Search François Faure To cite this version: François Faure. Inverting the Reflectance Map with Binary Search. Lecture Notes in Computer Science, Springer, 1995,
Taking Benefit from the User Density in Large Cities for Delivering SMS
 Taking Benefit from the User Density in Large Cities for Delivering SMS Yannick Léo, Anthony Busson, Carlos Sarraute, Eric Fleury To cite this version: Yannick Léo, Anthony Busson, Carlos Sarraute, Eric
Taking Benefit from the User Density in Large Cities for Delivering SMS Yannick Léo, Anthony Busson, Carlos Sarraute, Eric Fleury To cite this version: Yannick Léo, Anthony Busson, Carlos Sarraute, Eric
Application of RMAN Backup Technology in the Agricultural Products Wholesale Market System
 Application of RMAN Backup Technology in the Agricultural Products Wholesale Market System Ping Yu, Nan Zhou To cite this version: Ping Yu, Nan Zhou. Application of RMAN Backup Technology in the Agricultural
Application of RMAN Backup Technology in the Agricultural Products Wholesale Market System Ping Yu, Nan Zhou To cite this version: Ping Yu, Nan Zhou. Application of RMAN Backup Technology in the Agricultural
Weed Leaf Recognition in Complex Natural Scenes by Model-Guided Edge Pairing
 Weed Leaf Recognition in Complex Natural Scenes by Model-Guided Edge Pairing Benoit De Mezzo, Gilles Rabatel, Christophe Fiorio To cite this version: Benoit De Mezzo, Gilles Rabatel, Christophe Fiorio.
Weed Leaf Recognition in Complex Natural Scenes by Model-Guided Edge Pairing Benoit De Mezzo, Gilles Rabatel, Christophe Fiorio To cite this version: Benoit De Mezzo, Gilles Rabatel, Christophe Fiorio.
Zigbee Wireless Sensor Network Nodes Deployment Strategy for Digital Agricultural Data Acquisition
 Zigbee Wireless Sensor Network Nodes Deployment Strategy for Digital Agricultural Data Acquisition Xinjian Xiang, Xiaoqing Guo To cite this version: Xinjian Xiang, Xiaoqing Guo. Zigbee Wireless Sensor
Zigbee Wireless Sensor Network Nodes Deployment Strategy for Digital Agricultural Data Acquisition Xinjian Xiang, Xiaoqing Guo To cite this version: Xinjian Xiang, Xiaoqing Guo. Zigbee Wireless Sensor
Dense Hough transforms on gray level images using multi-scale derivatives
 Dense Hough transforms on gray level images using multi-scale derivatives Antoine Manzanera To cite this version: Antoine Manzanera. Dense Hough transforms on gray level images using multi-scale derivatives.
Dense Hough transforms on gray level images using multi-scale derivatives Antoine Manzanera To cite this version: Antoine Manzanera. Dense Hough transforms on gray level images using multi-scale derivatives.
Syrtis: New Perspectives for Semantic Web Adoption
 Syrtis: New Perspectives for Semantic Web Adoption Joffrey Decourselle, Fabien Duchateau, Ronald Ganier To cite this version: Joffrey Decourselle, Fabien Duchateau, Ronald Ganier. Syrtis: New Perspectives
Syrtis: New Perspectives for Semantic Web Adoption Joffrey Decourselle, Fabien Duchateau, Ronald Ganier To cite this version: Joffrey Decourselle, Fabien Duchateau, Ronald Ganier. Syrtis: New Perspectives
Catalogue of architectural patterns characterized by constraint components, Version 1.0
 Catalogue of architectural patterns characterized by constraint components, Version 1.0 Tu Minh Ton That, Chouki Tibermacine, Salah Sadou To cite this version: Tu Minh Ton That, Chouki Tibermacine, Salah
Catalogue of architectural patterns characterized by constraint components, Version 1.0 Tu Minh Ton That, Chouki Tibermacine, Salah Sadou To cite this version: Tu Minh Ton That, Chouki Tibermacine, Salah
Blind Browsing on Hand-Held Devices: Touching the Web... to Understand it Better
 Blind Browsing on Hand-Held Devices: Touching the Web... to Understand it Better Waseem Safi Fabrice Maurel Jean-Marc Routoure Pierre Beust Gaël Dias To cite this version: Waseem Safi Fabrice Maurel Jean-Marc
Blind Browsing on Hand-Held Devices: Touching the Web... to Understand it Better Waseem Safi Fabrice Maurel Jean-Marc Routoure Pierre Beust Gaël Dias To cite this version: Waseem Safi Fabrice Maurel Jean-Marc
Robust IP and UDP-lite header recovery for packetized multimedia transmission
 Robust IP and UDP-lite header recovery for packetized multimedia transmission Michel Kieffer, François Mériaux To cite this version: Michel Kieffer, François Mériaux. Robust IP and UDP-lite header recovery
Robust IP and UDP-lite header recovery for packetized multimedia transmission Michel Kieffer, François Mériaux To cite this version: Michel Kieffer, François Mériaux. Robust IP and UDP-lite header recovery
Framework for Hierarchical and Distributed Smart Grid Management
 Framework for Hierarchical and Distributed Smart Grid Management Rémi Bonnefoi, Christophe Moy, Jacques Palicot To cite this version: Rémi Bonnefoi, Christophe Moy, Jacques Palicot. Framework for Hierarchical
Framework for Hierarchical and Distributed Smart Grid Management Rémi Bonnefoi, Christophe Moy, Jacques Palicot To cite this version: Rémi Bonnefoi, Christophe Moy, Jacques Palicot. Framework for Hierarchical
Malware models for network and service management
 Malware models for network and service management Jérôme François, Radu State, Olivier Festor To cite this version: Jérôme François, Radu State, Olivier Festor. Malware models for network and service management.
Malware models for network and service management Jérôme François, Radu State, Olivier Festor To cite this version: Jérôme François, Radu State, Olivier Festor. Malware models for network and service management.
Very Tight Coupling between LTE and WiFi: a Practical Analysis
 Very Tight Coupling between LTE and WiFi: a Practical Analysis Younes Khadraoui, Xavier Lagrange, Annie Gravey To cite this version: Younes Khadraoui, Xavier Lagrange, Annie Gravey. Very Tight Coupling
Very Tight Coupling between LTE and WiFi: a Practical Analysis Younes Khadraoui, Xavier Lagrange, Annie Gravey To cite this version: Younes Khadraoui, Xavier Lagrange, Annie Gravey. Very Tight Coupling
A Practical Evaluation Method of Network Traffic Load for Capacity Planning
 A Practical Evaluation Method of Network Traffic Load for Capacity Planning Takeshi Kitahara, Shuichi Nawata, Masaki Suzuki, Norihiro Fukumoto, Shigehiro Ano To cite this version: Takeshi Kitahara, Shuichi
A Practical Evaluation Method of Network Traffic Load for Capacity Planning Takeshi Kitahara, Shuichi Nawata, Masaki Suzuki, Norihiro Fukumoto, Shigehiro Ano To cite this version: Takeshi Kitahara, Shuichi
Every 3-connected, essentially 11-connected line graph is hamiltonian
 Every 3-connected, essentially 11-connected line graph is hamiltonian Hong-Jian Lai, Yehong Shao, Ju Zhou, Hehui Wu To cite this version: Hong-Jian Lai, Yehong Shao, Ju Zhou, Hehui Wu. Every 3-connected,
Every 3-connected, essentially 11-connected line graph is hamiltonian Hong-Jian Lai, Yehong Shao, Ju Zhou, Hehui Wu To cite this version: Hong-Jian Lai, Yehong Shao, Ju Zhou, Hehui Wu. Every 3-connected,
Using a Medical Thesaurus to Predict Query Difficulty
 Using a Medical Thesaurus to Predict Query Difficulty Florian Boudin, Jian-Yun Nie, Martin Dawes To cite this version: Florian Boudin, Jian-Yun Nie, Martin Dawes. Using a Medical Thesaurus to Predict Query
Using a Medical Thesaurus to Predict Query Difficulty Florian Boudin, Jian-Yun Nie, Martin Dawes To cite this version: Florian Boudin, Jian-Yun Nie, Martin Dawes. Using a Medical Thesaurus to Predict Query
Change Detection System for the Maintenance of Automated Testing
 Change Detection System for the Maintenance of Automated Testing Miroslav Bures To cite this version: Miroslav Bures. Change Detection System for the Maintenance of Automated Testing. Mercedes G. Merayo;
Change Detection System for the Maintenance of Automated Testing Miroslav Bures To cite this version: Miroslav Bures. Change Detection System for the Maintenance of Automated Testing. Mercedes G. Merayo;
SIM-Mee - Mobilizing your social network
 SIM-Mee - Mobilizing your social network Jérémie Albert, Serge Chaumette, Damien Dubernet, Jonathan Ouoba To cite this version: Jérémie Albert, Serge Chaumette, Damien Dubernet, Jonathan Ouoba. SIM-Mee
SIM-Mee - Mobilizing your social network Jérémie Albert, Serge Chaumette, Damien Dubernet, Jonathan Ouoba To cite this version: Jérémie Albert, Serge Chaumette, Damien Dubernet, Jonathan Ouoba. SIM-Mee
Generic Design Space Exploration for Reconfigurable Architectures
 Generic Design Space Exploration for Reconfigurable Architectures Lilian Bossuet, Guy Gogniat, Jean Luc Philippe To cite this version: Lilian Bossuet, Guy Gogniat, Jean Luc Philippe. Generic Design Space
Generic Design Space Exploration for Reconfigurable Architectures Lilian Bossuet, Guy Gogniat, Jean Luc Philippe To cite this version: Lilian Bossuet, Guy Gogniat, Jean Luc Philippe. Generic Design Space
A N-dimensional Stochastic Control Algorithm for Electricity Asset Management on PC cluster and Blue Gene Supercomputer
 A N-dimensional Stochastic Control Algorithm for Electricity Asset Management on PC cluster and Blue Gene Supercomputer Stéphane Vialle, Xavier Warin, Patrick Mercier To cite this version: Stéphane Vialle,
A N-dimensional Stochastic Control Algorithm for Electricity Asset Management on PC cluster and Blue Gene Supercomputer Stéphane Vialle, Xavier Warin, Patrick Mercier To cite this version: Stéphane Vialle,
A Resource Discovery Algorithm in Mobile Grid Computing based on IP-paging Scheme
 A Resource Discovery Algorithm in Mobile Grid Computing based on IP-paging Scheme Yue Zhang, Yunxia Pei To cite this version: Yue Zhang, Yunxia Pei. A Resource Discovery Algorithm in Mobile Grid Computing
A Resource Discovery Algorithm in Mobile Grid Computing based on IP-paging Scheme Yue Zhang, Yunxia Pei To cite this version: Yue Zhang, Yunxia Pei. A Resource Discovery Algorithm in Mobile Grid Computing
Quasi-tilings. Dominique Rossin, Daniel Krob, Sebastien Desreux
 Quasi-tilings Dominique Rossin, Daniel Krob, Sebastien Desreux To cite this version: Dominique Rossin, Daniel Krob, Sebastien Desreux. Quasi-tilings. FPSAC/SFCA 03, 2003, Linkoping, Sweden. 2003.
Quasi-tilings Dominique Rossin, Daniel Krob, Sebastien Desreux To cite this version: Dominique Rossin, Daniel Krob, Sebastien Desreux. Quasi-tilings. FPSAC/SFCA 03, 2003, Linkoping, Sweden. 2003.
IntroClassJava: A Benchmark of 297 Small and Buggy Java Programs
 IntroClassJava: A Benchmark of 297 Small and Buggy Java Programs Thomas Durieux, Martin Monperrus To cite this version: Thomas Durieux, Martin Monperrus. IntroClassJava: A Benchmark of 297 Small and Buggy
IntroClassJava: A Benchmark of 297 Small and Buggy Java Programs Thomas Durieux, Martin Monperrus To cite this version: Thomas Durieux, Martin Monperrus. IntroClassJava: A Benchmark of 297 Small and Buggy
Multi-atlas labeling with population-specific template and non-local patch-based label fusion
 Multi-atlas labeling with population-specific template and non-local patch-based label fusion Vladimir Fonov, Pierrick Coupé, Simon Eskildsen, Jose Manjon, Louis Collins To cite this version: Vladimir
Multi-atlas labeling with population-specific template and non-local patch-based label fusion Vladimir Fonov, Pierrick Coupé, Simon Eskildsen, Jose Manjon, Louis Collins To cite this version: Vladimir
Human-Object Interaction Recognition by Learning the distances between the Object and the Skeleton Joints
 Human-Object Interaction Recognition by Learning the distances between the Object and the Skeleton Joints Meng Meng, Hassen Drira, Mohamed Daoudi, Jacques Boonaert To cite this version: Meng Meng, Hassen
Human-Object Interaction Recognition by Learning the distances between the Object and the Skeleton Joints Meng Meng, Hassen Drira, Mohamed Daoudi, Jacques Boonaert To cite this version: Meng Meng, Hassen
MUTE: A Peer-to-Peer Web-based Real-time Collaborative Editor
 MUTE: A Peer-to-Peer Web-based Real-time Collaborative Editor Matthieu Nicolas, Victorien Elvinger, Gérald Oster, Claudia-Lavinia Ignat, François Charoy To cite this version: Matthieu Nicolas, Victorien
MUTE: A Peer-to-Peer Web-based Real-time Collaborative Editor Matthieu Nicolas, Victorien Elvinger, Gérald Oster, Claudia-Lavinia Ignat, François Charoy To cite this version: Matthieu Nicolas, Victorien
A 64-Kbytes ITTAGE indirect branch predictor
 A 64-Kbytes ITTAGE indirect branch André Seznec To cite this version: André Seznec. A 64-Kbytes ITTAGE indirect branch. JWAC-2: Championship Branch Prediction, Jun 2011, San Jose, United States. 2011,.
A 64-Kbytes ITTAGE indirect branch André Seznec To cite this version: André Seznec. A 64-Kbytes ITTAGE indirect branch. JWAC-2: Championship Branch Prediction, Jun 2011, San Jose, United States. 2011,.
Linux: Understanding Process-Level Power Consumption
 Linux: Understanding Process-Level Power Consumption Aurélien Bourdon, Adel Noureddine, Romain Rouvoy, Lionel Seinturier To cite this version: Aurélien Bourdon, Adel Noureddine, Romain Rouvoy, Lionel Seinturier.
Linux: Understanding Process-Level Power Consumption Aurélien Bourdon, Adel Noureddine, Romain Rouvoy, Lionel Seinturier To cite this version: Aurélien Bourdon, Adel Noureddine, Romain Rouvoy, Lionel Seinturier.
Teaching Encapsulation and Modularity in Object-Oriented Languages with Access Graphs
 Teaching Encapsulation and Modularity in Object-Oriented Languages with Access Graphs Gilles Ardourel, Marianne Huchard To cite this version: Gilles Ardourel, Marianne Huchard. Teaching Encapsulation and
Teaching Encapsulation and Modularity in Object-Oriented Languages with Access Graphs Gilles Ardourel, Marianne Huchard To cite this version: Gilles Ardourel, Marianne Huchard. Teaching Encapsulation and
QAKiS: an Open Domain QA System based on Relational Patterns
 QAKiS: an Open Domain QA System based on Relational Patterns Elena Cabrio, Julien Cojan, Alessio Palmero Aprosio, Bernardo Magnini, Alberto Lavelli, Fabien Gandon To cite this version: Elena Cabrio, Julien
QAKiS: an Open Domain QA System based on Relational Patterns Elena Cabrio, Julien Cojan, Alessio Palmero Aprosio, Bernardo Magnini, Alberto Lavelli, Fabien Gandon To cite this version: Elena Cabrio, Julien
Visual planes-based simultaneous localization and model refinement for augmented reality
 Visual planes-based simultaneous localization and model refinement for augmented reality F. Servant, E. Marchand, P. Houlier, I. Marchal To cite this version: F. Servant, E. Marchand, P. Houlier, I. Marchal.
Visual planes-based simultaneous localization and model refinement for augmented reality F. Servant, E. Marchand, P. Houlier, I. Marchal To cite this version: F. Servant, E. Marchand, P. Houlier, I. Marchal.
lambda-min Decoding Algorithm of Regular and Irregular LDPC Codes
 lambda-min Decoding Algorithm of Regular and Irregular LDPC Codes Emmanuel Boutillon, Frédéric Guillou, Jean-Luc Danger To cite this version: Emmanuel Boutillon, Frédéric Guillou, Jean-Luc Danger lambda-min
lambda-min Decoding Algorithm of Regular and Irregular LDPC Codes Emmanuel Boutillon, Frédéric Guillou, Jean-Luc Danger To cite this version: Emmanuel Boutillon, Frédéric Guillou, Jean-Luc Danger lambda-min
TEXTURE SIMILARITY METRICS APPLIED TO HEVC INTRA PREDICTION
 TEXTURE SIMILARITY METRICS APPLIED TO HEVC INTRA PREDICTION Karam Naser, Vincent Ricordel, Patrick Le Callet To cite this version: Karam Naser, Vincent Ricordel, Patrick Le Callet. TEXTURE SIMILARITY METRICS
TEXTURE SIMILARITY METRICS APPLIED TO HEVC INTRA PREDICTION Karam Naser, Vincent Ricordel, Patrick Le Callet To cite this version: Karam Naser, Vincent Ricordel, Patrick Le Callet. TEXTURE SIMILARITY METRICS
Mapping classifications and linking related classes through SciGator, a DDC-based browsing library interface
 Mapping classifications and linking related classes through SciGator, a DDC-based browsing library interface Marcin Trzmielewski, Claudio Gnoli, Marco Lardera, Gaia Heidi Pallestrini, Matea Sipic To cite
Mapping classifications and linking related classes through SciGator, a DDC-based browsing library interface Marcin Trzmielewski, Claudio Gnoli, Marco Lardera, Gaia Heidi Pallestrini, Matea Sipic To cite
Comparator: A Tool for Quantifying Behavioural Compatibility
 Comparator: A Tool for Quantifying Behavioural Compatibility Meriem Ouederni, Gwen Salaün, Javier Cámara, Ernesto Pimentel To cite this version: Meriem Ouederni, Gwen Salaün, Javier Cámara, Ernesto Pimentel.
Comparator: A Tool for Quantifying Behavioural Compatibility Meriem Ouederni, Gwen Salaün, Javier Cámara, Ernesto Pimentel To cite this version: Meriem Ouederni, Gwen Salaün, Javier Cámara, Ernesto Pimentel.
Cloud My Task - A Peer-to-Peer Distributed Python Script Execution Service
 Cloud My Task - A Peer-to-Peer Distributed Python Script Execution Service Daniel Rizea, Daniela Ene, Rafaela Voiculescu, Mugurel Ionut Andreica To cite this version: Daniel Rizea, Daniela Ene, Rafaela
Cloud My Task - A Peer-to-Peer Distributed Python Script Execution Service Daniel Rizea, Daniela Ene, Rafaela Voiculescu, Mugurel Ionut Andreica To cite this version: Daniel Rizea, Daniela Ene, Rafaela
RETIN AL: An Active Learning Strategy for Image Category Retrieval
 RETIN AL: An Active Learning Strategy for Image Category Retrieval Philippe-Henri Gosselin, Matthieu Cord To cite this version: Philippe-Henri Gosselin, Matthieu Cord. RETIN AL: An Active Learning Strategy
RETIN AL: An Active Learning Strategy for Image Category Retrieval Philippe-Henri Gosselin, Matthieu Cord To cite this version: Philippe-Henri Gosselin, Matthieu Cord. RETIN AL: An Active Learning Strategy