Structure from Motion and Multi- view Geometry. Last lecture
|
|
|
- Roland Fleming
- 5 years ago
- Views:
Transcription
1 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH, pp , 1996 M. Levoy, P. Hanrahan, Light Field Rendering, SIGGRAPH, 1996 Aaron Isaksen, Leonard McMillan, Steven J. Gortler, Dynamically reparameterized light fields, SIGGRAPH 2000, pp D. Wood, D. Azuma, W. Aldinger, B. Curless, T. Duchamp, D. Salesin, and W. Steutzle. Surface light fields for 3D photography, SIGGRAPH,


2 A cube of light All light from an object can be represented as if it were coming from a cube Each point on the cube has a a 2-D set of rays emanating from the cube. Modeling: Move camera center over a 2-D surface. 2-D + 2-D -> 4-D 2
3 Two plane parameterization Rays are parameterized by where they intersect these planes. Any point in the 4D Light field/lumigraph is identified by its coordinates (s,t,u,v) Continuous light field L(s,t,u,v) Cube around object six slabs. Note that the lumigraph and light field papers interchange roles of (s,t) and (u,v) Rendering For each desired ray: Compute intersection with (u,v) and (s,t) planes Take radiance at closest ray Can be computed using texture mapping hardware Variants: interpolation Bilinear in (u,v) only Bilinear in (s,t) only Quadrilinear in (u,v,s,t) Apply band pass filter to remove HF noise that may cause aliasing 3

4 Lumigraph Rendering Use rough depth information to improve rendering quality Light Slabs (Again) Two-plane parameterization impacts reconstruction filters Aperture filtering removes high frequency data But if plane is wrong place, only stores blurred version of scene 4

5 Variable Aperture Real camera aperture produce depth-of-field effects Emulate depth-of-field effects by combining rays from several cameras Combine samples for each D s,t in the synthetic aperture to produce image 1. Render r with aperture A : in focus 2. Render r with aperature A : out of focus This lecture Motion contains useful information Epipolar constraint The motion field for a moving camera Factorization for orthographic cameras Perspective 8 point algorithm 1. Multiple View Geometry in Computer Vision, by Richard Hartley,Andrew Zisserman, Cambridge University Press, The Geometry of Multiple Images, by Olivier Faugeras, Quang-Tuan Luong, T. Papadopoulo, MIT Press, C. Tomasi, T. Kanade, Shape and Motion from Image Streams: A Factorization Method, IJCV, 9(2), 1992, Longuet-Higgins, Prazdny, The Interpretation of a Moving Retinal Image, Proc. R. Soc. Long. B, 1980, pp Longuet-Higgins, A computer algorithm for reconstructing a scene from two projections, Nature, Vol. 293, 1981, pp
6 Motion Demo Motion Research Motion Research Motion Segmentation Tracking Structure From Motion Infinitesimal SFM Multiview Methods Orthographic/Affine Perspective Uncalibrated Stereo 6

7 The Motion Field Motion When objects move at equal speed, those more remote seem to move more slowly. - Euclid, 300 BC 7


8 The Motion Field Where in the image did a point move? Down and left The Motion Field 8
9 Motion Field Equation v x, v y : Components of image motion T: Components of 3-D linear motion w: Angular velocity vector (x,y): Image point coordinates Z: depth f: focal length Pure Translation w = 0 9
10 Forward Translation & Focus of Expansion [Gibson, 1950] Pure Rotation: T=0 Independent of T x T y T z Independent of Z Only function of (x,y), f and w 10
11 Pure Rotation: Motion Field on Sphere Epipolar Geometry 11

12 Triangulation Nalwa Fig. 7.2 Epipolar Constraint Potential matches for p have to lie on the corresponding epipolar line l. Potential matches for p have to lie on the corresponding epipolar line l. 12
13 Epipolar Geometry Epipolar Plane Baseline Epipoles Epipolar Lines Epipolar Constraint: Calibrated Case [ t ] 0 = tz t y t 0 t x z t y tx 0 Essential Matrix (Longuet-Higgins, 1981) 13
14 Properties of the Essential Matrix E p is the epipolar line associated with p. T E p is the epipolar line associated with p. E e =0 and E e=0. E is singular. T E has two equal non-zero singular values (Huang and Faugeras, 1989). Rectification Given a pair of images, transform both images so that epipolar lines are scan lines. Estimate a Homography to apply to each image, given at least four corresponding points u' a v' = a w' a a a a a a a u v w 14

15 Rectification All epipolar lines are parallel in the rectified image plane. Rectification Given a pair of images, transform both images so that epipolar lines are scan lines. Input Images 15


16 Rectification Given a pair of images, transform both images so that epipolar lines are scan lines. Rectified Images Features on same epipolar line Truco Fig
![E vs. F revisited The Essential Matrix E: Encodes information on the extrinsic parameters only Has rank 2 since R is full rank and [T x ] is skew & rank 2 Its two non-zero singular values are equal 5](/docs-images/81/83596338/images/17-0.jpg "degrees of freedom The Fundamental Matrix F: Encodes information on both the intrinsic and extrinsic parameters Also has rank 2 since E is rank 2 7 degrees of freedom CS348, Fall 2001 Thanks Josh")
17 E vs. F revisited The Essential Matrix E: Encodes information on the extrinsic parameters only Has rank 2 since R is full rank and [T x ] is skew & rank 2 Its two non-zero singular values are equal 5 degrees of freedom The Fundamental Matrix F: Encodes information on both the intrinsic and extrinsic parameters Also has rank 2 since E is rank 2 7 degrees of freedom CS348, Fall 2001 Thanks Josh David Kriegman, 2001 Epipolar Constraint: Uncalibrated Case Fundamental Matrix (Faugeras and Luong, 1992) 17
18 Properties of the Fundamental Matrix F p is the epipolar line associated with p. T F p is the epipolar line associated with p. F e =0 and F e=0. F is singular. T E vs. F revisited The Essential Matrix E: Encodes information on the extrinsic parameters only Has rank 2 since R is full rank and [T x ] is skew & rank 2 Its two non-zero singular values are equal 5 degrees of freedom The Fundamental Matrix F: Encodes information on both the intrinsic and extrinsic parameters Also has rank 2 since E is rank 2 7 degrees of freedom CS348, Fall 2001 Thanks Josh David Kriegman,
19 The Eight-Point Algorithm (Longuet-Higgins, 1981) Minimize: under the constraint F =1. 2 Non-Linear Least-Squares Approach (Luong et al., 1993) Minimize with respect to the coefficients of F, using an appropriate rank-2 parameterization. 19
20 Recovering Motion Recall epipolar constraint Where 0 [t ] = t z t y t z 0 tx ty tx 0 Solve for R & t David Kriegman, 2001 CS348, Fall 2001 Structure from Motion: Uncalibrated cameras and projective amibguity CS348, Fall 2001 Thanks Josh David Kriegman,
21 The Eight-Point Algorithm (Longuet-Higgins, 1981) Minimize: under the constraint F =1. 2 Non-Linear Least-Squares Approach (Luong et al., 1993) Minimize with respect to the coefficients of F, using an appropriate rank-2 parameterization. 21
22 Recovering Motion Recall epipolar constraint Where 0 [t ] = t z t y t z 0 tx ty tx 0 Solve for R & t David Kriegman, 2001 CS348, Fall 2001 Structure from Motion: Uncalibrated cameras and projective amibguity CS348, Fall 2001 Thanks Josh David Kriegman,
23 Projective Ambiguity We see that the same set of corresponding image points could come from two different sets of real world points and therefore both sets satisfy: CS348, Fall 2001 Thanks Josh David Kriegman, 2001 The only if part We would also like to show that if the cameras have the same fundamental matrix then there is a 4 by 4 matrix that relates them. If we take the camera matrices and multiply them by: we get The same is true for and CS348, Fall 2001 Thanks Josh David Kriegman,
24 Factorization method/affine cameras C. Tomasi, T. Kanade, Shape and Motion from Image Streams: A Factorization Method, IJCV, 9(2), 1992, Factorization Notation N: Number of images n: Number of points P i : i th point in 3-D R j, T j : Rotation & Translation of Camera j (x i,j, y i,j ): image of j th point measured in the i th frame. 24
25 Origin of 3D Points at 3-D 3 Centroid Centroid 1 P = n n P j i= 1 Centered Data Points ~ P = P j P Origin of image at image Centroid Centered Image Points x ~ i, j xi, j xi Centriod of image points is projection of 3D centroid ~ yi, j = y i, j y i 25
26 Data Matrix ~ ~ x i, j, yi, j ~ X ~ W = ~ Y are the i,j-thelement of the N by n data matrices X, Y 2N by n registered data matrix Rank Theorem: Without noise, the rank of of W is is less than or or equal to to The Rank Theorem: Factorized The registered measurement matrix can be expressed in a matrix form: represents the camera rotation is the shape matrix 26
27 Factoring Given a data matrix containing measured feature points, it can be factored using singular value decomposition as: Where ~ W = UDV D: n by n diagonal matrix, non-negative entries, called singular values U: 2N by n with orthogonal columns V T : n by n with orthogonal columns T σ 1 0 L 0 σ D 0 2 L 0 =, σ 1 σ 2 σ 3 M M O M 0 0 L σ n σ n Without noise, σ i =0, i>3 With noise, set σi =0, i>3 Factoring: After setting σ i =0, i>3 Where ~ W ' = U ' D' V ' D : 3 by 3 diagonal matrix, non-negative entries U: 2N by 3 with orthogonal columns V T : 3 by n with orthogonal columns T ~ W ' = U ' D' V ' where Rˆ = U' D' Sˆ = D' 1/ 2 1/ 2 V ' T T = RS ˆ ˆ 27

28 Ambiguity ~ 1 1 W = RS ˆ ˆ = RAA ˆ Sˆ = ( RA ˆ )( A Sˆ) True for any A. So, find an A such that rows of RA are unit length and pairs corresponding to same image are orthogonal. Rˆ A 1 A S ˆ Estimated camera orientation Estimated 3-D structure Four of 150 input images 28


29 Tracked Corner Features 3-D D Reconstruction 29
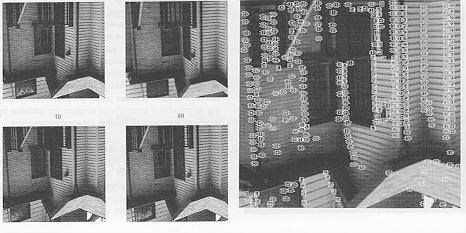

30 Building Reconstruction Triangulate Texture Map 30
More and More on Light Fields. Last Lecture
 More and More on Light Fields Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 4 Last Lecture Re-review with emphasis on radiometry Mosaics & Quicktime VR The Plenoptic function The main
More and More on Light Fields Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 4 Last Lecture Re-review with emphasis on radiometry Mosaics & Quicktime VR The Plenoptic function The main
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Epipolar geometry. x x
 Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Announcements. Motion. Structure-from-Motion (SFM) Motion. Discrete Motion: Some Counting
 Motion. Discrete Motion: Some Counting") Announcements Motion HW 4 due Friday Final Exam: Tuesday, 6/7 at 8:00-11:00 Fill out your CAPES Introduction to Computer Vision CSE 152 Lecture 20 Motion Some problems of motion 1. Correspondence: Where
Announcements Motion HW 4 due Friday Final Exam: Tuesday, 6/7 at 8:00-11:00 Fill out your CAPES Introduction to Computer Vision CSE 152 Lecture 20 Motion Some problems of motion 1. Correspondence: Where
Announcements. Stereo
 Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
CS231M Mobile Computer Vision Structure from motion
 CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Announcements. Motion. Structure-from-Motion (SFM) Motion. Discrete Motion: Some Counting
 Motion. Discrete Motion: Some Counting") Announcements Motion Introduction to Computer Vision CSE 152 Lecture 20 HW 4 due Friday at Midnight Final Exam: Tuesday, 6/12 at 8:00AM-11:00AM, regular classroom Extra Office Hours: Monday 6/11 9:00AM-10:00AM
Announcements Motion Introduction to Computer Vision CSE 152 Lecture 20 HW 4 due Friday at Midnight Final Exam: Tuesday, 6/12 at 8:00AM-11:00AM, regular classroom Extra Office Hours: Monday 6/11 9:00AM-10:00AM
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Lecture 5 Epipolar Geometry
 Lecture 5 Epipolar Geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 5-24-Jan-18 Lecture 5 Epipolar Geometry Why is stereo useful? Epipolar constraints Essential
Lecture 5 Epipolar Geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 5-24-Jan-18 Lecture 5 Epipolar Geometry Why is stereo useful? Epipolar constraints Essential
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
Recovering structure from a single view Pinhole perspective projection
 EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book)
") Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/,
Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/,
Perception and Action using Multilinear Forms
 Perception and Action using Multilinear Forms Anders Heyden, Gunnar Sparr, Kalle Åström Dept of Mathematics, Lund University Box 118, S-221 00 Lund, Sweden email: {heyden,gunnar,kalle}@maths.lth.se Abstract
Perception and Action using Multilinear Forms Anders Heyden, Gunnar Sparr, Kalle Åström Dept of Mathematics, Lund University Box 118, S-221 00 Lund, Sweden email: {heyden,gunnar,kalle}@maths.lth.se Abstract
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
Week 2: Two-View Geometry. Padua Summer 08 Frank Dellaert
 Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Image Transfer Methods. Satya Prakash Mallick Jan 28 th, 2003
 Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Structure from Motion
 Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Last lecture. Passive Stereo Spacetime Stereo
 Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
The end of affine cameras
 The end of affine cameras Affine SFM revisited Epipolar geometry Two-view structure from motion Multi-view structure from motion Planches : http://www.di.ens.fr/~ponce/geomvis/lect3.pptx http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
The end of affine cameras Affine SFM revisited Epipolar geometry Two-view structure from motion Multi-view structure from motion Planches : http://www.di.ens.fr/~ponce/geomvis/lect3.pptx http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multi-view geometry problems
 Multi-view geometry Multi-view geometry problems Structure: Given projections o the same 3D point in two or more images, compute the 3D coordinates o that point? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera
Multi-view geometry Multi-view geometry problems Structure: Given projections o the same 3D point in two or more images, compute the 3D coordinates o that point? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Structure from Motion
 Structure from Motion Lecture-13 Moving Light Display 1 Shape from Motion Problem Given optical flow or point correspondences, compute 3-D motion (translation and rotation) and shape (depth). 2 S. Ullman
Structure from Motion Lecture-13 Moving Light Display 1 Shape from Motion Problem Given optical flow or point correspondences, compute 3-D motion (translation and rotation) and shape (depth). 2 S. Ullman
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
CS 231A: Computer Vision (Winter 2018) Problem Set 2
 Problem Set 2") CS 231A: Computer Vision (Winter 2018) Problem Set 2 Due Date: Feb 09 2018, 11:59pm Note: In this PS, using python2 is recommended, as the data files are dumped with python2. Using python3 might cause
CS 231A: Computer Vision (Winter 2018) Problem Set 2 Due Date: Feb 09 2018, 11:59pm Note: In this PS, using python2 is recommended, as the data files are dumped with python2. Using python3 might cause
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Lecture'9'&'10:'' Stereo'Vision'
 Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Introduction à la vision artificielle X
 Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Camera Calibration Using Line Correspondences
 Camera Calibration Using Line Correspondences Richard I. Hartley G.E. CRD, Schenectady, NY, 12301. Ph: (518)-387-7333 Fax: (518)-387-6845 Email : hartley@crd.ge.com Abstract In this paper, a method of
Camera Calibration Using Line Correspondences Richard I. Hartley G.E. CRD, Schenectady, NY, 12301. Ph: (518)-387-7333 Fax: (518)-387-6845 Email : hartley@crd.ge.com Abstract In this paper, a method of
Structure from motion
 Multi-view geometry Structure rom motion Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Figure credit: Noah Snavely Structure rom motion? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Structure:
Multi-view geometry Structure rom motion Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Figure credit: Noah Snavely Structure rom motion? Camera 1 Camera 2 R 1,t 1 R 2,t 2 Camera 3 R 3,t 3 Structure:
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
CS231A Course Notes 4: Stereo Systems and Structure from Motion
 CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Structure from Motion
 Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
A Factorization Method for Structure from Planar Motion
 A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
CS 231A Computer Vision (Winter 2015) Problem Set 2
 Problem Set 2") CS 231A Computer Vision (Winter 2015) Problem Set 2 Due Feb 9 th 2015 11:59pm 1 Fundamental Matrix (20 points) In this question, you will explore some properties of fundamental matrix and derive a minimal
CS 231A Computer Vision (Winter 2015) Problem Set 2 Due Feb 9 th 2015 11:59pm 1 Fundamental Matrix (20 points) In this question, you will explore some properties of fundamental matrix and derive a minimal
C280, Computer Vision
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Multiple View Geometry. Frank Dellaert
 Multiple View Geometry Frank Dellaert Outline Intro Camera Review Stereo triangulation Geometry of 2 views Essential Matrix Fundamental Matrix Estimating E/F from point-matches Why Consider Multiple Views?
Multiple View Geometry Frank Dellaert Outline Intro Camera Review Stereo triangulation Geometry of 2 views Essential Matrix Fundamental Matrix Estimating E/F from point-matches Why Consider Multiple Views?
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Geometry of Multiple views
 1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Multiple Views Geometry
 Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
Multiple Views Geometry Subhashis Banerjee Dept. Computer Science and Engineering IIT Delhi email: suban@cse.iitd.ac.in January 2, 28 Epipolar geometry Fundamental geometric relationship between two perspective
The Geometry Behind the Numerical Reconstruction of Two Photos
 The Geometry Behind the Numerical Reconstruction of Two Photos Hellmuth Stachel stachel@dmg.tuwien.ac.at http://www.geometrie.tuwien.ac.at/stachel ICEGD 2007, The 2 nd Internat. Conf. on Eng g Graphics
The Geometry Behind the Numerical Reconstruction of Two Photos Hellmuth Stachel stachel@dmg.tuwien.ac.at http://www.geometrie.tuwien.ac.at/stachel ICEGD 2007, The 2 nd Internat. Conf. on Eng g Graphics
Undergrad HTAs / TAs. Help me make the course better! HTA deadline today (! sorry) TA deadline March 21 st, opens March 15th
 TA deadline March 21 st, opens March 15th") Undergrad HTAs / TAs Help me make the course better! HTA deadline today (! sorry) TA deadline March 2 st, opens March 5th Project 2 Well done. Open ended parts, lots of opportunity for mistakes. Real implementation
Undergrad HTAs / TAs Help me make the course better! HTA deadline today (! sorry) TA deadline March 2 st, opens March 5th Project 2 Well done. Open ended parts, lots of opportunity for mistakes. Real implementation
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 4 Affine Structure from Motion Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 4 Affine Structure from Motion Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
3D reconstruction class 11
 3D reconstruction class 11 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan. 14, 16
3D reconstruction class 11 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan. 14, 16
Computer Vision I. Announcement
 Announcement Stereo I HW3: Coming soon Stereo! CSE5A Lecture 3 Binocular Stereopsis: Mars Gien two images of a scene where relatie locations of cameras are known, estimate depth of all common scene points.
Announcement Stereo I HW3: Coming soon Stereo! CSE5A Lecture 3 Binocular Stereopsis: Mars Gien two images of a scene where relatie locations of cameras are known, estimate depth of all common scene points.
Passive 3D Photography
 SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
Image-based modeling (IBM) and image-based rendering (IBR)
 and image-based rendering (IBR)") Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Computer Vision Lecture 20
 Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Lecture 3: Camera Calibration, DLT, SVD
 Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
But First: Multi-View Projective Geometry
 View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
3D Computer Vision. Structure from Motion. Prof. Didier Stricker
 3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
Structure from Motion. Lecture-15
 Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Robust Geometry Estimation from two Images
 Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MAPI Computer Vision. Multiple View Geometry
 MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
Computer Vision: Lecture 3
 Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Two-View Geometry (Course 23, Lecture D)
") Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often