Transforms 1 Christian Miller CS Fall 2011
|
|
|
- Hilda Verity Morrison
- 5 years ago
- Views:
Transcription

1 Transforms 1 Christian Miller CS Fall 2011
2 Transformations What happens if you multiply a square matrix and a vector together? You get a different vector with the same number of coordinates These are linear transformations


3 Scaling Stretches each of the coordinates by a factor alpha Origin stays unchanged

4 Reflection α = < -1, 1 > α = < 1, 1 > α = < -1, -1 > α = < 1, -1 > Just scaling with negative values Flips over the origin
5 Rotation Rotates CCW around the chosen axis Also through the origin
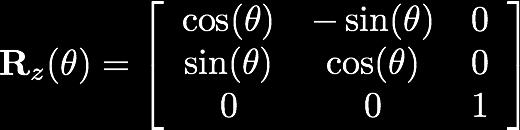
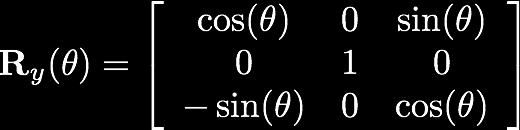
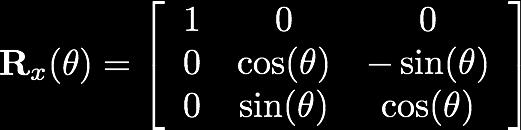
6 Rotation

7 Shear Stretches one dimension at an angle Not very useful
8 Translation Everything you can do with 3x3 matrices happens around the origin How do we just move something around?
9 Homogeneous coordinates We go up to 4D Add a w coordinate to each point / vector Add an additional row and column to matrices (It s actually 3D projective space, but uses 4 coordinates)
10 Homogeneous points and vectors Points have w = 1 Vectors have w = 0


11 Translation v Use the extra coordinates to perform translation Vectors are unaffected by translation


12 Homogeneous matrices Can take existing transformation matrices, and extend them with the identity to get 4x4 versions
13 Rotation through a point Translate to origin, rotate, translate back Multiply the transform matrices together
14 Inverse shortcuts Scale: replace α with 1/α Rotate: inverse is the transpose Shear: I don t even remember Translation: replace v with -v Composite transforms: recall
15 General transforms Multiplying transforms makes them harder to read This is the general form of a 3D affine transform R: rotational / scaling part (3x3) t: translational part (3x1)
16 Transforming normals Normals get distorted when scaled Must use the inverse transpose of a transform
17 Note on coordinates We ll use 4x1 vectors and 4x4 matrices from here on What about that last row? (always 0, 0, 0, 1) Required to keep w coordinate intact Changes when perspective is brought in
18 Change of coordinates A matrix transforms coordinates from one frame to another The final coordinate frame is called the world or spatial frame A coordinate frame attached to an object is called a local frame
19 Change of coordinates Point in world frame Point in local frame Positioning of local frame relative to world frame
20 Change of coordinates v = < 0.6, 0.6 > v = < 1.1, 2.1 > Local frame World frame
21 Change of coordinates v = < 0.6, 0.6 > v = < 1.1, 2.1 > Local frame World frame
22 Change of coordinates v = < 0.6, 0.6 > v = < 1.1, 2.1 > Local frame World frame
23 Change of coordinates v = < 0.6, 0.6 > v = < 1.1, 2.1 > Local frame World frame
24 Change of coordinates v = < 0.6, 0.6 > v = < 1.1, 2.1 > Local frame World frame

25 Direct specification v u M p w Local World A coordinate frame is just a point and 3 vectors Write the coordinates of a new frame relative to the world frame into a matrix, and you have a transformation
26 Inverse The inverse of a transform does the opposite Converts world frame coordinates to local
27 Composing transforms Matrices can be multiplied together If you multiply several transform matrices together, the result has the same effect as doing them all separately
28 Composing transforms Matrix multiplication is non-commutative The order in which you apply transforms is crucial
29 Intuition There are two ways to interpret what sequences of transforms do: forwards and backwards Both methods yield the same results Use whichever one is more intuitive for a given problem We ll use translate / rotate / scale as an example
30 What we want Local World Use translate, rotate, scale to get this result
31 Forwards Multiply new transforms on the right of the previous one Every transform is specified in the local coordinate system of the previous one Imagine that you re carrying the local frame along as you stack up transformations
32 Forwards: M = T Translate first to target location
33 Forwards: M = TR Rotate next, which happens relative to the already translated frame
34 Forwards: M = TRS Then scale, which happens with respect to the already translated and rotated frame
35 Backwards Multiply new transforms on the left of the previous one Every transform is specified with respect to the world frame, regardless of what has already been done Imagine that you re discarding the local frame and reusing to the world frame after every transform
36 Scale first Backwards: M = S
37 Backwards: M = RS Rotate next
38 Backwards: M = TRS Finally, translate to the final location
39 Intuition We got the same result (M = TRS) each time It s important to be able to interpret transforms in both ways! If you re having trouble coming up with a transform, try using the other method
40 Scene graph A scene graph is how anything with a position and orientation is stored in graphics software A hierarchical tree of transformations, rooted at the world frame Transforms for objects are multiplied together (on the right) traversing down the tree
41 Scene graph World Knight Dragon Torso Leg1 Leg2 Leg1 Leg4 Arm1 Arm2 Leg2 Leg3 Sword Shield Damsel
42 Scene graph Rendering implemented with a matrix stack Do a depth-first traversal of the tree Enter node: push matrix and apply transform Render object Traverse children Exit node: pop matrix
43 OpenGL: ordering OpenGL uses the forward method Calling glrotate, gltranslate, etc. multiplies the new transform onto the right of the old E.g.: M = MX
44 OpenGL: matrix stack glpushmatrix() and glpopmatrix() will do the respective operation on the matrix stack Objects are rendered using the top matrix Push will copy the existing top matrix Use to implement scene graphs
45 OpenGL: matrix funcs glloadidentity(): replaces current M with I glloadmatrix(): loads a given matrix into M glmultmatrix(): multiplies a given matrix onto the right of M
46 But watch out OpenGL stores matrices in column-major order Normal C multidimensional arrays are row-major You may have to transpose matrices before handing them off to OpenGL
47 One last thing Look up glulookat()
Computer Graphics Hands-on
 Computer Graphics Hands-on Two-Dimensional OpenGL Transformations Objectives To get hands-on experience manipulating the OpenGL current transformation (MODELVIEW) matrix to achieve desired effects To gain
Computer Graphics Hands-on Two-Dimensional OpenGL Transformations Objectives To get hands-on experience manipulating the OpenGL current transformation (MODELVIEW) matrix to achieve desired effects To gain
3D Viewing Episode 2
 3D Viewing Episode 2 1 Positioning and Orienting the Camera Recall that our projection calculations, whether orthographic or frustum/perspective, were made with the camera at (0, 0, 0) looking down the
3D Viewing Episode 2 1 Positioning and Orienting the Camera Recall that our projection calculations, whether orthographic or frustum/perspective, were made with the camera at (0, 0, 0) looking down the
Computer Graphics Geometric Transformations
 Computer Graphics 2016 6. Geometric Transformations Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2016-10-31 Contents Transformations Homogeneous Co-ordinates Matrix Representations of Transformations
Computer Graphics 2016 6. Geometric Transformations Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2016-10-31 Contents Transformations Homogeneous Co-ordinates Matrix Representations of Transformations
Describe the Orthographic and Perspective projections. How do we combine together transform matrices?
 Aims and objectives By the end of the lecture you will be able to Work with multiple transform matrices Describe the viewing process in OpenGL Design and build a camera control APIs Describe the Orthographic
Aims and objectives By the end of the lecture you will be able to Work with multiple transform matrices Describe the viewing process in OpenGL Design and build a camera control APIs Describe the Orthographic
Translation. 3D Transformations. Rotation about z axis. Scaling. CS 4620 Lecture 8. 3 Cornell CS4620 Fall 2009!Lecture 8
 Translation 3D Transformations CS 4620 Lecture 8 1 2 Scaling Rotation about z axis 3 4 Rotation about x axis Rotation about y axis 5 6 Transformations in OpenGL Stack-based manipulation of model-view transformation,
Translation 3D Transformations CS 4620 Lecture 8 1 2 Scaling Rotation about z axis 3 4 Rotation about x axis Rotation about y axis 5 6 Transformations in OpenGL Stack-based manipulation of model-view transformation,
Graphics pipeline and transformations. Composition of transformations
 Graphics pipeline and transformations Composition of transformations Order matters! ( rotation * translation translation * rotation) Composition of transformations = matrix multiplication: if T is a rotation
Graphics pipeline and transformations Composition of transformations Order matters! ( rotation * translation translation * rotation) Composition of transformations = matrix multiplication: if T is a rotation
CS 428: Fall Introduction to. Transformations in OpenGL + hierarchical modeling. Andrew Nealen, Rutgers, /21/2009 1
 CS 428: Fall 2009 Introduction to Computer Graphics Transformations in OpenGL + hierarchical modeling 9/21/2009 1 Review of affine transformations Use projective geometry staple of CG Euclidean (x,z) (x,y,z)
CS 428: Fall 2009 Introduction to Computer Graphics Transformations in OpenGL + hierarchical modeling 9/21/2009 1 Review of affine transformations Use projective geometry staple of CG Euclidean (x,z) (x,y,z)
2D/3D Geometric Transformations and Scene Graphs
 2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
Affine Transformations in 3D
 Affine Transformations in 3D 1 Affine Transformations in 3D 1 Affine Transformations in 3D General form 2 Translation Elementary 3D Affine Transformations 3 Scaling Around the Origin 4 Along x-axis Shear
Affine Transformations in 3D 1 Affine Transformations in 3D 1 Affine Transformations in 3D General form 2 Translation Elementary 3D Affine Transformations 3 Scaling Around the Origin 4 Along x-axis Shear
COMP3421. Week 2 - Transformations in 2D and Vector Geometry Revision
 COMP3421 Week 2 - Transformations in 2D and Vector Geometry Revision Exercise 1. Write code to draw (an approximation) of the surface of a circle at centre 0,0 with radius 1 using triangle fans. Transformation
COMP3421 Week 2 - Transformations in 2D and Vector Geometry Revision Exercise 1. Write code to draw (an approximation) of the surface of a circle at centre 0,0 with radius 1 using triangle fans. Transformation
6.837 Computer Graphics Hierarchical Modeling Wojciech Matusik, MIT EECS Some slides from BarbCutler & Jaakko Lehtinen
 6.837 Computer Graphics Hierarchical Modeling Wojciech Matusik, MIT EECS Some slides from BarbCutler & Jaakko Lehtinen Image courtesy of BrokenSphere on Wikimedia Commons. License: CC-BY-SA. This content
6.837 Computer Graphics Hierarchical Modeling Wojciech Matusik, MIT EECS Some slides from BarbCutler & Jaakko Lehtinen Image courtesy of BrokenSphere on Wikimedia Commons. License: CC-BY-SA. This content
Linear and Affine Transformations Coordinate Systems
 Linear and Affine Transformations Coordinate Systems Recall A transformation T is linear if Recall A transformation T is linear if Every linear transformation can be represented as matrix Linear Transformation
Linear and Affine Transformations Coordinate Systems Recall A transformation T is linear if Recall A transformation T is linear if Every linear transformation can be represented as matrix Linear Transformation
Chapter 3 - Basic Mathematics for 3D Computer Graphics
 Chapter 3 - Basic Mathematics for 3D Computer Graphics Three-Dimensional Geometric Transformations Affine Transformations and Homogeneous Coordinates OpenGL Matrix Logic Translation Add a vector t Geometrical
Chapter 3 - Basic Mathematics for 3D Computer Graphics Three-Dimensional Geometric Transformations Affine Transformations and Homogeneous Coordinates OpenGL Matrix Logic Translation Add a vector t Geometrical
Hierarchical Modeling II. Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico
 Hierarchical Modeling II Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Objectives Build a tree-structured model of a humanoid figure
Hierarchical Modeling II Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Objectives Build a tree-structured model of a humanoid figure
CS 4204 Computer Graphics
 CS 424 Computer Graphics 2D Transformations Yong Cao Virginia Tech References: Introduction to Computer Graphics course notes by Doug Bowman Interactive Computer Graphics, Fourth Edition, Ed Angle Transformations
CS 424 Computer Graphics 2D Transformations Yong Cao Virginia Tech References: Introduction to Computer Graphics course notes by Doug Bowman Interactive Computer Graphics, Fourth Edition, Ed Angle Transformations
Review of Thursday. xa + yb xc + yd
 Review of Thursday Vectors and points are two/three-dimensional objects Operations on vectors (dot product, cross product, ) Matrices are linear transformations of vectors a c b x d y = xa + yb xc + yd
Review of Thursday Vectors and points are two/three-dimensional objects Operations on vectors (dot product, cross product, ) Matrices are linear transformations of vectors a c b x d y = xa + yb xc + yd
CT5510: Computer Graphics. Transformation BOCHANG MOON
 CT5510: Computer Graphics Transformation BOCHANG MOON 2D Translation Transformations such as rotation and scale can be represented using a matrix M.., How about translation? No way to express this using
CT5510: Computer Graphics Transformation BOCHANG MOON 2D Translation Transformations such as rotation and scale can be represented using a matrix M.., How about translation? No way to express this using
Two possible ways to specify transformations. Each part of the object is transformed independently relative to the origin
 Transformations Two possible ways to specify transformations Each part of the object is transformed independently relative to the origin - Not convenient! z y Translate the base by (5,0,0); Translate the
Transformations Two possible ways to specify transformations Each part of the object is transformed independently relative to the origin - Not convenient! z y Translate the base by (5,0,0); Translate the
CS4202: Test. 1. Write the letter corresponding to the library name next to the statement or statements that describe library.
 CS4202: Test Name: 1. Write the letter corresponding to the library name next to the statement or statements that describe library. (4 points) A. GLUT contains routines that use lower level OpenGL commands
CS4202: Test Name: 1. Write the letter corresponding to the library name next to the statement or statements that describe library. (4 points) A. GLUT contains routines that use lower level OpenGL commands
Hierarchical Modeling. University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell
 Hierarchical Modeling University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell Reading Angel, sections 9.1-9.6 [reader pp. 169-185] OpenGL Programming Guide, chapter 3 Focus especially
Hierarchical Modeling University of Texas at Austin CS384G - Computer Graphics Fall 2010 Don Fussell Reading Angel, sections 9.1-9.6 [reader pp. 169-185] OpenGL Programming Guide, chapter 3 Focus especially
TIEA311 Tietokonegrafiikan perusteet kevät 2018
 TIEA311 Tietokonegrafiikan perusteet kevät 2018 ( Principles of Computer Graphics Spring 2018) Copyright and Fair Use Notice: The lecture videos of this course are made available for registered students
TIEA311 Tietokonegrafiikan perusteet kevät 2018 ( Principles of Computer Graphics Spring 2018) Copyright and Fair Use Notice: The lecture videos of this course are made available for registered students
E.Order of Operations
 Appendix E E.Order of Operations This book describes all the performed between initial specification of vertices and final writing of fragments into the framebuffer. The chapters of this book are arranged
Appendix E E.Order of Operations This book describes all the performed between initial specification of vertices and final writing of fragments into the framebuffer. The chapters of this book are arranged
COMP 175 COMPUTER GRAPHICS. Lecture 07: Scene Graph. COMP 175: Computer Graphics March 10, Remco Chang 07 Scene Graph
 Lecture 07: Scene Graph COMP 175: Computer Graphics March 10, 2015 1/47 Refresher: OpenGL Matrix Transformation Pipeline Input: list of 3D coordinates (x, y, z) GL_MODELVIEW Model transform View transform
Lecture 07: Scene Graph COMP 175: Computer Graphics March 10, 2015 1/47 Refresher: OpenGL Matrix Transformation Pipeline Input: list of 3D coordinates (x, y, z) GL_MODELVIEW Model transform View transform
Fachhochschule Regensburg, Germany, February 15, 2017
 s Operations Fachhochschule Regensburg, Germany, February 15, 2017 s Motivating Example s Operations To take a photograph of a scene: Set up your tripod and point camera at the scene (Viewing ) Position
s Operations Fachhochschule Regensburg, Germany, February 15, 2017 s Motivating Example s Operations To take a photograph of a scene: Set up your tripod and point camera at the scene (Viewing ) Position
Using GLU/GLUT Objects
 Using GLU/GLUT Objects GLU/GLUT provides very simple object primitives glutwirecone glutwirecube glucylinder glutwireteapot GLU/GLUT Objects Each glu/glut object has its default size, position, and orientation
Using GLU/GLUT Objects GLU/GLUT provides very simple object primitives glutwirecone glutwirecube glucylinder glutwireteapot GLU/GLUT Objects Each glu/glut object has its default size, position, and orientation
Modeling Objects. Modeling. Symbol-Instance Table. Instance Transformation. Each appearance of the object in the model is an instance
 Modeling Objects Modeling Hierarchical Transformations Hierarchical Models Scene Graphs A prototype has a default size, position, and orientation You need to perform modeling transformations to position
Modeling Objects Modeling Hierarchical Transformations Hierarchical Models Scene Graphs A prototype has a default size, position, and orientation You need to perform modeling transformations to position
Hierarchical Modelling
 Gregor Miller gregor{at}ece.ubc.ca Hierarchical Modelling Limitations of linear modelling Articulated models Tree and DAG models Traversal Strategies Instance Transformation Start with a prototype object
Gregor Miller gregor{at}ece.ubc.ca Hierarchical Modelling Limitations of linear modelling Articulated models Tree and DAG models Traversal Strategies Instance Transformation Start with a prototype object
Today. Parity. General Polygons? Non-Zero Winding Rule. Winding Numbers. CS559 Lecture 11 Polygons, Transformations
 CS559 Lecture Polygons, Transformations These are course notes (not used as slides) Written by Mike Gleicher, Oct. 005 With some slides adapted from the notes of Stephen Chenney Final version (after class)
CS559 Lecture Polygons, Transformations These are course notes (not used as slides) Written by Mike Gleicher, Oct. 005 With some slides adapted from the notes of Stephen Chenney Final version (after class)
COMP3421. Week 2 - Transformations in 2D and Vector Geometry Revision
 COMP3421 Week 2 - Transformations in 2D and Vector Geometry Revision Exercise 1. Write code to draw (an approximation) of the surface of a circle at centre 0,0 with radius 1 using triangle fans. 2. At
COMP3421 Week 2 - Transformations in 2D and Vector Geometry Revision Exercise 1. Write code to draw (an approximation) of the surface of a circle at centre 0,0 with radius 1 using triangle fans. 2. At
EECE 478. Learning Objectives. Learning Objectives. Linear Algebra and 3D Geometry. Linear algebra in 3D. Coordinate systems
 EECE 478 Linear Algebra and 3D Geometry Learning Objectives Linear algebra in 3D Define scalars, points, vectors, lines, planes Manipulate to test geometric properties Coordinate systems Use homogeneous
EECE 478 Linear Algebra and 3D Geometry Learning Objectives Linear algebra in 3D Define scalars, points, vectors, lines, planes Manipulate to test geometric properties Coordinate systems Use homogeneous
GEOMETRIC TRANSFORMATIONS AND VIEWING
 GEOMETRIC TRANSFORMATIONS AND VIEWING 2D and 3D 1/44 2D TRANSFORMATIONS HOMOGENIZED Transformation Scaling Rotation Translation Matrix s x s y cosθ sinθ sinθ cosθ 1 dx 1 dy These 3 transformations are
GEOMETRIC TRANSFORMATIONS AND VIEWING 2D and 3D 1/44 2D TRANSFORMATIONS HOMOGENIZED Transformation Scaling Rotation Translation Matrix s x s y cosθ sinθ sinθ cosθ 1 dx 1 dy These 3 transformations are
Transforms. COMP 575/770 Spring 2013
 Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
Scene Graphs. CS4620/5620: Lecture 7. Announcements. HW 1 out. PA 1 will be out on Wed
 CS4620/5620: Lecture 7 Scene Graphs 1 Announcements HW 1 out PA 1 will be out on Wed Next week practicum will have an office hour type session on Open GL 2 Example Can represent drawing with flat list
CS4620/5620: Lecture 7 Scene Graphs 1 Announcements HW 1 out PA 1 will be out on Wed Next week practicum will have an office hour type session on Open GL 2 Example Can represent drawing with flat list
Math background. 2D Geometric Transformations. Implicit representations. Explicit representations. Read: CS 4620 Lecture 6
 Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Spring 2013, CS 112 Programming Assignment 2 Submission Due: April 26, 2013
 Spring 2013, CS 112 Programming Assignment 2 Submission Due: April 26, 2013 PROJECT GOAL: Write a restricted OpenGL library. The goal of the project is to compute all the transformation matrices with your
Spring 2013, CS 112 Programming Assignment 2 Submission Due: April 26, 2013 PROJECT GOAL: Write a restricted OpenGL library. The goal of the project is to compute all the transformation matrices with your
Notes on Assignment. Notes on Assignment. Notes on Assignment. Notes on Assignment
 Notes on Assignment Notes on Assignment Objects on screen - made of primitives Primitives are points, lines, polygons - watch vertex ordering The main object you need is a box When the MODELVIEW matrix
Notes on Assignment Notes on Assignment Objects on screen - made of primitives Primitives are points, lines, polygons - watch vertex ordering The main object you need is a box When the MODELVIEW matrix
Hierarchical Modeling
 Hierarchical Modeling Geometric Primitives Remember that most graphics APIs have only a few geometric primitives Spheres, cubes, triangles, etc These primitives are instanced in order to apply transforms
Hierarchical Modeling Geometric Primitives Remember that most graphics APIs have only a few geometric primitives Spheres, cubes, triangles, etc These primitives are instanced in order to apply transforms
Reading. Hierarchical Modeling. Symbols and instances. Required: Angel, sections , 9.8. Optional:
 Reading Required: Angel, sections 9.1 9.6, 9.8 Optional: Hierarchical Modeling OpenGL rogramming Guide, the Red Book, chapter 3 cse457-07-hierarchical 1 cse457-07-hierarchical 2 Symbols and instances Most
Reading Required: Angel, sections 9.1 9.6, 9.8 Optional: Hierarchical Modeling OpenGL rogramming Guide, the Red Book, chapter 3 cse457-07-hierarchical 1 cse457-07-hierarchical 2 Symbols and instances Most
Hierarchical Modeling and scene graphs
 Hierarchical Modeling and scene graphs Overview Examine the limitations of linear modeling Introduce hierarchical models Introduce Tree and DAG models Build a tree-structured model of a humanoid figure
Hierarchical Modeling and scene graphs Overview Examine the limitations of linear modeling Introduce hierarchical models Introduce Tree and DAG models Build a tree-structured model of a humanoid figure
Computer Graphics. Chapter 5 Geometric Transformations. Somsak Walairacht, Computer Engineering, KMITL
 Chapter 5 Geometric Transformations Somsak Walairacht, Computer Engineering, KMITL 1 Outline Basic Two-Dimensional Geometric Transformations Matrix Representations and Homogeneous Coordinates Inverse Transformations
Chapter 5 Geometric Transformations Somsak Walairacht, Computer Engineering, KMITL 1 Outline Basic Two-Dimensional Geometric Transformations Matrix Representations and Homogeneous Coordinates Inverse Transformations
Hierarchy I. Guoying Zhao 1 / 40
 Computer Graphics Hierarchy I Guoying Zhao 1 / 40 Hierarchical Modeling I Guoying Zhao 2 / 40 Objectives Examine the limitations of linear modeling Symbols and instances Introduce hierarchical models Articulated
Computer Graphics Hierarchy I Guoying Zhao 1 / 40 Hierarchical Modeling I Guoying Zhao 2 / 40 Objectives Examine the limitations of linear modeling Symbols and instances Introduce hierarchical models Articulated
CS380: Computer Graphics 2D Imaging and Transformation. Sung-Eui Yoon ( 윤성의 ) Course URL:
 Course URL:") CS380: Computer Graphics 2D Imaging and Transformation Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/cg Class Objectives Write down simple 2D transformation matrixes Understand the
CS380: Computer Graphics 2D Imaging and Transformation Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/cg Class Objectives Write down simple 2D transformation matrixes Understand the
To Do. Outline. Translation. Homogeneous Coordinates. Foundations of Computer Graphics. Representation of Points (4-Vectors) Start doing HW 1
 Start doing HW 1") Foundations of Computer Graphics Homogeneous Coordinates Start doing HW 1 To Do Specifics of HW 1 Last lecture covered basic material on transformations in 2D Likely need this lecture to understand full
Foundations of Computer Graphics Homogeneous Coordinates Start doing HW 1 To Do Specifics of HW 1 Last lecture covered basic material on transformations in 2D Likely need this lecture to understand full
Where We Are: Static Models
 Where We Are: Static Models Our models are static sets of polygons We can only move them via transformations translate, scale, rotate, or any other 4x4 matrix This does not allow us to simulate very realistic
Where We Are: Static Models Our models are static sets of polygons We can only move them via transformations translate, scale, rotate, or any other 4x4 matrix This does not allow us to simulate very realistic
Advanced Computer Graphics Transformations. Matthias Teschner
 Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Lecture 4. Viewing, Projection and Viewport Transformations
 Notes on Assignment Notes on Assignment Hw2 is dependent on hw1 so hw1 and hw2 will be graded together i.e. You have time to finish both by next monday 11:59p Email list issues - please cc: elif@cs.nyu.edu
Notes on Assignment Notes on Assignment Hw2 is dependent on hw1 so hw1 and hw2 will be graded together i.e. You have time to finish both by next monday 11:59p Email list issues - please cc: elif@cs.nyu.edu
Mouse Ray Picking Explained
 Mouse Ray Picking Explained Brian Hook http://www.bookofhook.com April 5, 2005 1 Introduction There comes a time in every 3D game where the user needs to click on something in the scene. Maybe he needs
Mouse Ray Picking Explained Brian Hook http://www.bookofhook.com April 5, 2005 1 Introduction There comes a time in every 3D game where the user needs to click on something in the scene. Maybe he needs
Computer Graphics (CS 543) Lecture 6a: Hierarchical 3D Models. Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)
 Lecture 6a: Hierarchical 3D Models. Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)") Computer Graphics (CS 543) Lecture 6a: Hierarchical 3D Models Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Instance Transformation Start with unique object (a symbol)
Computer Graphics (CS 543) Lecture 6a: Hierarchical 3D Models Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Instance Transformation Start with unique object (a symbol)
Lecture 5: Transforms II. Computer Graphics and Imaging UC Berkeley CS184/284A
 Lecture 5: Transforms II Computer Graphics and Imaging UC Berkeley 3D Transforms 3D Transformations Use homogeneous coordinates again: 3D point = (x, y, z, 1) T 3D vector = (x, y, z, 0) T Use 4 4 matrices
Lecture 5: Transforms II Computer Graphics and Imaging UC Berkeley 3D Transforms 3D Transformations Use homogeneous coordinates again: 3D point = (x, y, z, 1) T 3D vector = (x, y, z, 0) T Use 4 4 matrices
Vector Algebra Transformations. Lecture 4
 Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
Hierarchical Modeling and Scene Graphs
 Hierarchical Modeling and Scene Graphs Adapted from material prepared by Ed Angel Spring 2009 Objectives Examine the limitations of linear modeling Symbols and instances Introduce hierarchical models Articulated
Hierarchical Modeling and Scene Graphs Adapted from material prepared by Ed Angel Spring 2009 Objectives Examine the limitations of linear modeling Symbols and instances Introduce hierarchical models Articulated
Linear transformations Affine transformations Transformations in 3D. Graphics 2009/2010, period 1. Lecture 5: linear and affine transformations
 Graphics 2009/2010, period 1 Lecture 5 Linear and affine transformations Vector transformation: basic idea Definition Examples Finding matrices Compositions of transformations Transposing normal vectors
Graphics 2009/2010, period 1 Lecture 5 Linear and affine transformations Vector transformation: basic idea Definition Examples Finding matrices Compositions of transformations Transposing normal vectors
Fall CSCI 420: Computer Graphics. 2.2 Transformations. Hao Li.
 Fall 2017 CSCI 420: Computer Graphics 2.2 Transformations Hao Li http://cs420.hao-li.com 1 OpenGL Transformations Matrices Model-view matrix (4x4 matrix) Projection matrix (4x4 matrix) vertices in 3D Model-view
Fall 2017 CSCI 420: Computer Graphics 2.2 Transformations Hao Li http://cs420.hao-li.com 1 OpenGL Transformations Matrices Model-view matrix (4x4 matrix) Projection matrix (4x4 matrix) vertices in 3D Model-view
3D Viewing Episode 2
 3D Viewing Episode 2 1 Positioning and Orienting the Camera Recall that our projection calculations, whether orthographic or frustum/perspective, were made with the camera at (0, 0, 0) looking down the
3D Viewing Episode 2 1 Positioning and Orienting the Camera Recall that our projection calculations, whether orthographic or frustum/perspective, were made with the camera at (0, 0, 0) looking down the
Hierarchical Modeling and Scene Graphs
 Hierarchical Modeling and Scene Graphs Adapted from material prepared by Ed Angel Spring 2009 Objectives Examine the limitations of linear modeling Symbols and instances Introduce hierarchical models Articulated
Hierarchical Modeling and Scene Graphs Adapted from material prepared by Ed Angel Spring 2009 Objectives Examine the limitations of linear modeling Symbols and instances Introduce hierarchical models Articulated
Geometric Transformations
 Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
The Viewing Pipeline adaptation of Paul Bunn & Kerryn Hugo s notes
 The Viewing Pipeline adaptation of Paul Bunn & Kerryn Hugo s notes What is it? The viewing pipeline is the procession of operations that are applied to the OpenGL matrices, in order to create a 2D representation
The Viewing Pipeline adaptation of Paul Bunn & Kerryn Hugo s notes What is it? The viewing pipeline is the procession of operations that are applied to the OpenGL matrices, in order to create a 2D representation
CSE528 Computer Graphics: Theory, Algorithms, and Applications
 CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-2424 Tel: (631)632-845; Fax: (631)632-8334 qin@cs.stonybrook.edu
CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-2424 Tel: (631)632-845; Fax: (631)632-8334 qin@cs.stonybrook.edu
Computer Graphics Hands-on
 Computer Graphics Hands-on Two-Dimensional Transformations Objectives Visualize the fundamental 2D geometric operations translation, rotation about the origin, and scale about the origin Learn how to compose
Computer Graphics Hands-on Two-Dimensional Transformations Objectives Visualize the fundamental 2D geometric operations translation, rotation about the origin, and scale about the origin Learn how to compose
CS 559 Computer Graphics Midterm Exam March 22, :30-3:45 pm
 CS 559 Computer Graphics Midterm Exam March 22, 2010 2:30-3:45 pm This exam is closed book and closed notes. Please write your name and CS login on every page! (we may unstaple the exams for grading) Please
CS 559 Computer Graphics Midterm Exam March 22, 2010 2:30-3:45 pm This exam is closed book and closed notes. Please write your name and CS login on every page! (we may unstaple the exams for grading) Please
(Refer Slide Time: 00:04:20)
") Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture 8 Three Dimensional Graphics Welcome back all of you to the lectures in Computer
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture 8 Three Dimensional Graphics Welcome back all of you to the lectures in Computer
HIERARCHICAL TRANSFORMATIONS A Practical Introduction
 HIERARCHICAL TRANSFORMATIONS A Practical Introduction Christopher Peters HPCViz, KTH Royal Institute of Technology, Sweden chpeters@kth.se https://www.kth.se/profile/chpeters/ Transformations Many objects
HIERARCHICAL TRANSFORMATIONS A Practical Introduction Christopher Peters HPCViz, KTH Royal Institute of Technology, Sweden chpeters@kth.se https://www.kth.se/profile/chpeters/ Transformations Many objects
Introduction to OpenGL
 OpenGL is an alternative to Direct3D for 3D graphics rendering Originally developed by Silicon Graphics Inc (SGI), turned over to multi-vendor group (OpenGL Architecture Review Board) in 1992 Unlike DirectX,
OpenGL is an alternative to Direct3D for 3D graphics rendering Originally developed by Silicon Graphics Inc (SGI), turned over to multi-vendor group (OpenGL Architecture Review Board) in 1992 Unlike DirectX,
Computer Viewing. CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science
 Computer Viewing CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science 1 Objectives Introduce the mathematics of projection Introduce OpenGL viewing functions Look at
Computer Viewing CS 537 Interactive Computer Graphics Prof. David E. Breen Department of Computer Science 1 Objectives Introduce the mathematics of projection Introduce OpenGL viewing functions Look at
Overview. By end of the week:
 Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
Viewing and Projection
 CSCI 480 Computer Graphics Lecture 5 Viewing and Projection January 25, 2012 Jernej Barbic University of Southern California Shear Transformation Camera Positioning Simple Parallel Projections Simple Perspective
CSCI 480 Computer Graphics Lecture 5 Viewing and Projection January 25, 2012 Jernej Barbic University of Southern California Shear Transformation Camera Positioning Simple Parallel Projections Simple Perspective
CSC 470 Computer Graphics
 CSC 470 Computer Graphics Transformations of Objects CSC 470 Computer Graphics, Dr.N. Georgieva, CSI/CUNY 1 Transformations of objects - 2D CSC 470 Computer Graphics, Dr.N. Georgieva, CSI/CUNY 2 Using
CSC 470 Computer Graphics Transformations of Objects CSC 470 Computer Graphics, Dr.N. Georgieva, CSI/CUNY 1 Transformations of objects - 2D CSC 470 Computer Graphics, Dr.N. Georgieva, CSI/CUNY 2 Using
CSE 690: GPGPU. Lecture 2: Understanding the Fabric - Intro to Graphics. Klaus Mueller Stony Brook University Computer Science Department
 CSE 690: GPGPU Lecture 2: Understanding the Fabric - Intro to Graphics Klaus Mueller Stony Brook University Computer Science Department Klaus Mueller, Stony Brook 2005 1 Surface Graphics Objects are explicitely
CSE 690: GPGPU Lecture 2: Understanding the Fabric - Intro to Graphics Klaus Mueller Stony Brook University Computer Science Department Klaus Mueller, Stony Brook 2005 1 Surface Graphics Objects are explicitely
3.1 Viewing and Projection
 Fall 2017 CSCI 420: Computer Graphics 3.1 Viewing and Projection Hao Li http://cs420.hao-li.com 1 Recall: Affine Transformations Given a point [xyz] > form homogeneous coordinates [xyz1] > The transformed
Fall 2017 CSCI 420: Computer Graphics 3.1 Viewing and Projection Hao Li http://cs420.hao-li.com 1 Recall: Affine Transformations Given a point [xyz] > form homogeneous coordinates [xyz1] > The transformed
Rendering Pipeline and Coordinates Transforms
 Rendering Pipeline and Coordinates Transforms Alessandro Martinelli alessandro.martinelli@unipv.it 16 October 2013 Rendering Pipeline (3): Coordinates Transforms Rendering Architecture First Rendering
Rendering Pipeline and Coordinates Transforms Alessandro Martinelli alessandro.martinelli@unipv.it 16 October 2013 Rendering Pipeline (3): Coordinates Transforms Rendering Architecture First Rendering
Today. Today. Introduction. Matrices. Matrices. Computergrafik. Transformations & matrices Introduction Matrices
 Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
CS559: Computer Graphics
 CS559: Computer Graphics Lecture 8: 3D Transforms Li Zhang Spring 28 Most Slides from Stephen Chenne Finish Color space Toda 3D Transforms and Coordinate sstem Reading: Shirle ch 6 RGB and HSV Green(,,)
CS559: Computer Graphics Lecture 8: 3D Transforms Li Zhang Spring 28 Most Slides from Stephen Chenne Finish Color space Toda 3D Transforms and Coordinate sstem Reading: Shirle ch 6 RGB and HSV Green(,,)
CSE328 Fundamentals of Computer Graphics
 CSE328 Fundamentals of Computer Graphics Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 794--44 Tel: (63)632-845; Fax: (63)632-8334 qin@cs.sunysb.edu
CSE328 Fundamentals of Computer Graphics Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 794--44 Tel: (63)632-845; Fax: (63)632-8334 qin@cs.sunysb.edu
Modeling with Transformations
 Modeling with Transformations Prerequisites This module requires some understanding of 3D geometry, particularly a sense of how objects can be moved around in 3-space. The student should also have some
Modeling with Transformations Prerequisites This module requires some understanding of 3D geometry, particularly a sense of how objects can be moved around in 3-space. The student should also have some
GRAFIKA KOMPUTER. ~ M. Ali Fauzi
 GRAFIKA KOMPUTER ~ M. Ali Fauzi Drawing 2D Graphics VIEWPORT TRANSFORMATION Recall :Coordinate System glutreshapefunc(reshape); void reshape(int w, int h) { glviewport(0,0,(glsizei) w, (GLsizei) h); glmatrixmode(gl_projection);
GRAFIKA KOMPUTER ~ M. Ali Fauzi Drawing 2D Graphics VIEWPORT TRANSFORMATION Recall :Coordinate System glutreshapefunc(reshape); void reshape(int w, int h) { glviewport(0,0,(glsizei) w, (GLsizei) h); glmatrixmode(gl_projection);
Transformations. Rotation and Scaling
 Transformations In OpenGL, transformation are performed in the opposite order they are called 4 3 2 1 translate(1., 1.,.); rotatez(45.); scale(2., 2.,.); DrawSquare(.,., 1.); 4 3 2 1 scale(2., 2.,.); rotatez(45.);
Transformations In OpenGL, transformation are performed in the opposite order they are called 4 3 2 1 translate(1., 1.,.); rotatez(45.); scale(2., 2.,.); DrawSquare(.,., 1.); 4 3 2 1 scale(2., 2.,.); rotatez(45.);
OpenGL: Setup 3D World
 CT4510: Computer Graphics OpenGL: Setup 3D World BOCHANG MOON Prerequisite for 3D World Understanding on basic mathematical background, transformations, and spaces Pixels, raster image, ector, matrix,
CT4510: Computer Graphics OpenGL: Setup 3D World BOCHANG MOON Prerequisite for 3D World Understanding on basic mathematical background, transformations, and spaces Pixels, raster image, ector, matrix,
CIS 636 Interactive Computer Graphics CIS 736 Computer Graphics Spring 2011
 CIS 636 Interactive Computer Graphics CIS 736 Computer Graphics Spring 2011 Lab 1a of 7 OpenGL Setup and Basics Fri 28 Jan 2011 Part 1a (#1 5) due: Thu 03 Feb 2011 (before midnight) The purpose of this
CIS 636 Interactive Computer Graphics CIS 736 Computer Graphics Spring 2011 Lab 1a of 7 OpenGL Setup and Basics Fri 28 Jan 2011 Part 1a (#1 5) due: Thu 03 Feb 2011 (before midnight) The purpose of this
Prof. Feng Liu. Fall /19/2016
 Prof. Feng Liu Fall 26 http://www.cs.pdx.edu/~fliu/courses/cs447/ /9/26 Last time More 2D Transformations Homogeneous Coordinates 3D Transformations The Viewing Pipeline 2 Today Perspective projection
Prof. Feng Liu Fall 26 http://www.cs.pdx.edu/~fliu/courses/cs447/ /9/26 Last time More 2D Transformations Homogeneous Coordinates 3D Transformations The Viewing Pipeline 2 Today Perspective projection
Transformations. CSCI 420 Computer Graphics Lecture 4
 CSCI 420 Computer Graphics Lecture 4 Transformations Jernej Barbic University of Southern California Vector Spaces Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices [Angel, Ch. 4]
CSCI 420 Computer Graphics Lecture 4 Transformations Jernej Barbic University of Southern California Vector Spaces Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices [Angel, Ch. 4]
Lecture 5 2D Transformation
 Lecture 5 2D Transformation What is a transformation? In computer graphics an object can be transformed according to position, orientation and size. Exactly what it says - an operation that transforms
Lecture 5 2D Transformation What is a transformation? In computer graphics an object can be transformed according to position, orientation and size. Exactly what it says - an operation that transforms
Viewing and Projection
 15-462 Computer Graphics I Lecture 5 Viewing and Projection Shear Transformation Camera Positioning Simple Parallel Projections Simple Perspective Projections [Angel, Ch. 5.2-5.4] January 30, 2003 [Red
15-462 Computer Graphics I Lecture 5 Viewing and Projection Shear Transformation Camera Positioning Simple Parallel Projections Simple Perspective Projections [Angel, Ch. 5.2-5.4] January 30, 2003 [Red
Viewing and Projection
 CSCI 480 Computer Graphics Lecture 5 Viewing and Projection Shear Transformation Camera Positioning Simple Parallel Projections Simple Perspective Projections [Geri s Game, Pixar, 1997] January 26, 2011
CSCI 480 Computer Graphics Lecture 5 Viewing and Projection Shear Transformation Camera Positioning Simple Parallel Projections Simple Perspective Projections [Geri s Game, Pixar, 1997] January 26, 2011
You will have the entire period (until 9:00pm) to complete the exam, although the exam is designed to take less time.
 to complete the exam, although the exam is designed to take less time.") Page 1 of 6 Exam November 1, 2006 This exam is closed book and closed notes. You will have the entire period (until 9:00pm) to complete the exam, although the exam is designed to take less time. Please
Page 1 of 6 Exam November 1, 2006 This exam is closed book and closed notes. You will have the entire period (until 9:00pm) to complete the exam, although the exam is designed to take less time. Please
Surface Graphics. 200 polys 1,000 polys 15,000 polys. an empty foot. - a mesh of spline patches:
 Surface Graphics Objects are explicitely defined by a surface or boundary representation (explicit inside vs outside) This boundary representation can be given by: - a mesh of polygons: 200 polys 1,000
Surface Graphics Objects are explicitely defined by a surface or boundary representation (explicit inside vs outside) This boundary representation can be given by: - a mesh of polygons: 200 polys 1,000
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
OpenGL Transformations
 OpenGL Transformations R. J. Renka Department of Computer Science & Engineering University of North Texas 02/18/2014 Introduction The most essential aspect of OpenGL is the vertex pipeline described in
OpenGL Transformations R. J. Renka Department of Computer Science & Engineering University of North Texas 02/18/2014 Introduction The most essential aspect of OpenGL is the vertex pipeline described in
Something noteworthy
 Something noteworthy Very very noteworthy OpenGL postmultiply each new transformation matrix M = M x Mnew Example: perform translation, then rotation 0) M = Identity 1) translation T(tx,ty,0) -> M = M
Something noteworthy Very very noteworthy OpenGL postmultiply each new transformation matrix M = M x Mnew Example: perform translation, then rotation 0) M = Identity 1) translation T(tx,ty,0) -> M = M
API for creating a display window and using keyboard/mouse interations. See RayWindow.cpp to see how these are used for Assignment3
 OpenGL Introduction Introduction OpenGL OpenGL is an API for computer graphics. Hardware-independent Windowing or getting input is not included in the API Low-level Only knows about triangles (kind of,
OpenGL Introduction Introduction OpenGL OpenGL is an API for computer graphics. Hardware-independent Windowing or getting input is not included in the API Low-level Only knows about triangles (kind of,
Graphics and Visualization
 International University Bremen Spring Semester 2006 Recap Representing graphic objects by homogenous points and vectors Using affine transforms to modify objects Using projections to display objects
International University Bremen Spring Semester 2006 Recap Representing graphic objects by homogenous points and vectors Using affine transforms to modify objects Using projections to display objects
3D Transformations. CS 4620 Lecture 10. Cornell CS4620 Fall 2014 Lecture Steve Marschner (with previous instructors James/Bala)
") 3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
Lecture 5b. Transformation
 Lecture 5b Transformation Refresher Transformation matrices [4 x 4]: the fourth coordinate is homogenous coordinate. Rotation Transformation: Axis of rotation must through origin (0,0,0). If not, translation
Lecture 5b Transformation Refresher Transformation matrices [4 x 4]: the fourth coordinate is homogenous coordinate. Rotation Transformation: Axis of rotation must through origin (0,0,0). If not, translation
COMP3421. Introduction to 3D Graphics
 COMP3421 Introduction to 3D Graphics 3D coodinates Moving to 3D is simply a matter of adding an extra dimension to our points and vectors: 3D coordinates 3D coordinate systems can be left or right handed.
COMP3421 Introduction to 3D Graphics 3D coodinates Moving to 3D is simply a matter of adding an extra dimension to our points and vectors: 3D coordinates 3D coordinate systems can be left or right handed.
Lecture 5: Viewing. CSE Computer Graphics (Fall 2010)
") Lecture 5: Viewing CSE 40166 Computer Graphics (Fall 2010) Review: from 3D world to 2D pixels 1. Transformations are represented by matrix multiplication. o Modeling o Viewing o Projection 2. Clipping
Lecture 5: Viewing CSE 40166 Computer Graphics (Fall 2010) Review: from 3D world to 2D pixels 1. Transformations are represented by matrix multiplication. o Modeling o Viewing o Projection 2. Clipping
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
GL_MODELVIEW transformation
 lecture 3 view transformations model transformations GL_MODELVIEW transformation view transformations: How do we map from world coordinates to camera/view/eye coordinates? model transformations: How do
lecture 3 view transformations model transformations GL_MODELVIEW transformation view transformations: How do we map from world coordinates to camera/view/eye coordinates? model transformations: How do
Lecture 4: Transforms. Computer Graphics CMU /15-662, Fall 2016
 Lecture 4: Transforms Computer Graphics CMU 15-462/15-662, Fall 2016 Brief recap from last class How to draw a triangle - Why focus on triangles, and not quads, pentagons, etc? - What was specific to triangles
Lecture 4: Transforms Computer Graphics CMU 15-462/15-662, Fall 2016 Brief recap from last class How to draw a triangle - Why focus on triangles, and not quads, pentagons, etc? - What was specific to triangles
Chapter 2 - Basic Mathematics for 3D Computer Graphics
 Chapter 2 - Basic Mathematics for 3D Computer Graphics Three-Dimensional Geometric Transformations Affine Transformations and Homogeneous Coordinates Combining Transformations Translation t + t Add a vector
Chapter 2 - Basic Mathematics for 3D Computer Graphics Three-Dimensional Geometric Transformations Affine Transformations and Homogeneous Coordinates Combining Transformations Translation t + t Add a vector
2D and 3D Transformations AUI Course Denbigh Starkey
 2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
3D Transformations. CS 4620 Lecture Kavita Bala w/ prior instructor Steve Marschner. Cornell CS4620 Fall 2015 Lecture 11
 3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6