Filtering Images. Contents
|
|
|
- Walter Stokes
- 5 years ago
- Views:
Transcription
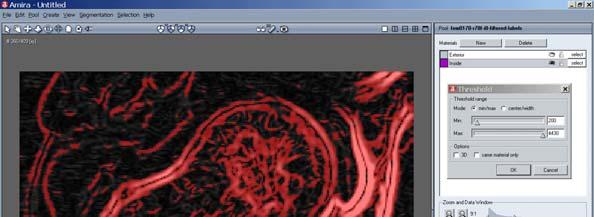
1 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents


2 Noise Digital images can contain a variety of types of noise. Noise often is the result of errors in the image acquisition process pixel values that do not reflect the true intensities of a real scene Noise types Gaussian noise Salt and pepper noise White noise Gaussian Noise In the additive noise model the image information is given by the true image value and an additive noise component. The additive deviations of the noise have a Gaussian distribution, normally with a mean of zero and a given standard deviation σ. (, ) = (, ) + (, ) f i j s i j n i j The ratio of signal and noise is given by (Signal to Noise Ratio, SNR): SNR σ = σ s f 1 σ = n σ n Imnoise, mean 0, variance 0.01

3 Salt and Pepper Noise Salt and pepper noise has extreme values and is typically produced by transmission errors. White Noise White noise has a uniform frequency distribution
4 Smoothing filters Mean filtering Median filter Gaussian filter Sigmoid filter Gradient filter Discrete deviation Laplacian of Gaussian Edge detection Thresholds Zero crossings Canny method Filters Mean filtering Mean filtering, smoothing, averaging, box filtering The mean filter smoothes a signal and reduces noise. Each pixel is replaced by the mean value of its neighbors. It is a low pass filter and eliminates high frequencies.
![Mean filtering The mean filter is a convolution filter defined by its kernel 1D: D: [ ] 1/3 1/3 1/3 1/9 1/9 1/9 1/9 1/9 1/9 1/9 1/9 1/9 If there exist high noise peaks (salt and pepper noise), a](/docs-images/84/89826364/images/5-0.jpg "median filter produces better results. Multiple application of small filters (3x3) preserve better edges than the use of large filters (7x7).")
5 Mean filtering The mean filter is a convolution filter defined by its kernel 1D: D: [ ] 1/3 1/3 1/3 1/9 1/9 1/9 1/9 1/9 1/9 1/9 1/9 1/9 If there exist high noise peaks (salt and pepper noise), a median filter produces better results. Multiple application of small filters (3x3) preserve better edges than the use of large filters (7x7). Median or rank filter A median filter is used to reduce noise. It preserves edges and details better than average filters. It is not a linear filter but it sorts the neighbors and uses the median as new pixel value. If the number of neighbors is even, the average value of both middle pixels is taken.
.")

6 Median filter example The effect of median filters on a grayscale image (3x3 Kernel, upper right; 5x5 Kernel, lower left). Gaussian filter A Gaussian filter smoothes images and reduces noise, but also the image resolution Its kernel represents the Gaussian curve given by: x x 1 1 1D: G( x) e σ = D: ( ) = σ π σ π + y G x e σ
7 Gaussian Filter In practice such an infinite filter is approximated by a finite convolution filter that can be computed according to a given standard deviation. In the one dimensional case a convenient kernel size is between the doubled or tripled standard deviation: σ < k < 3σ k = round (.5 σ ) The larger the standard deviation, the stronger is also the smoothing effect of the filter, and the larger the kernel size has to be. Gaussian Filter The following equations compute one dimensional Gaussian kernel in real and integer arrays. Gauss, real (, ) ( ), ( 1,..., ) ( 1, ) ( 0, ) ( 1,..., ) ( 1, ) ( ) ( ), ( 1 ),..., () 1, ( 0) () 1,..., ( 1 ), ( ) Kernel x σ = G k G k + G G G G k G k = G k G k G G G G k G k ( x, σ ) KernelGauss,int = 1 G k 1 G 1 G( 0) G() 1 G( k 1 1,,...,,,,..., ) round round round round round,1 s G k G k G( k) G( k) G( k) ( ) ( ) G( 0) G( k) () ( ) G() i G( k) k 1 s = + round + round i= 1 The normalization factor s reduces the sum of all kernel elements to one
8 Gaussian Filter The Gaussian filter computes a weighted average of the neighbor pixels. Therefore it preserves better edges than a simple average filter. The Gaussian filter is circular symmetric and separable. Therefore a D operator can be composed by two 1D operators in x and y direction (,, σ ) ( σ ) 1 + x y x y σ σ σ σ π σ π σ π G x y = e = e e G G f = G f σ σ 1 + σ Gaussian Filter Examples σ = 1 k = round(.5 1) = σ = 1.5 k = round(.5 1.5) = σ = k = round(.5 ) =
 Sigmoid Filter With a Sigmoid filter a gray value range a around a given value b can be enhanced. It is a one pixel operator.")
9 Gaussian Filter Example The effect of Gaussian filters on a grayscale image (upper left). (Upper right: sigma 1, 5x5 kernel; lower left: sigma 1.5, 9x9 kernel; lower right: sigma, 11x11 kernel) Sigmoid Filter With a Sigmoid filter a gray value range a around a given value b can be enhanced. It is a one pixel operator. The new pixel value is determined by the following equation: f max min ( x) = min+ [ min, max] 1+ e b x a The values a and be define the value range to be enhanced and the interval [min,max] determines the target range of the new values. We get: f ( b) = 0.5( max min ) f ( ) = min f ( ) = max

 (, ) (, ) f xy f xy f x Δxy gx = x Δx (, ) (, ) (, )")
10 Sigmoid Filter Sigmoid-Filter applied on a grayscale image (upper left): (upper right: a=80; lower left: a=0; lower right: a=00). The gray value window of the original window is [0, 55]. The window of the target images is the same. The centre of the value range to enhance is 00 (min=0, max=55, b=00). Gradient Filter: Discrete Derivation of order one The first partial derivation in an image is given by (, ) (, ) (, ) f xy f xy f x Δxy gx = x Δx (, ) (, ) (, ) f xy f xy f xy Δy g y = y Δy In the discrete case we get Δ x= 1, Δ y = 1 x y (, ) ( 1, ) (, ) (, 1) g = f x y f x y g = f x y f x y The corresponding kernels are given by: [ 1 1] 1 1
11 Gradient Image The gradient image g(x,y) shows the regions of the largest variation in the image. g x It consists of the lengths of the gradient vectors ( ) = + g xy g g, x y g y The directions of the D vectors are given by the angle g Φ ( xy, ) = arctan x g y Prewitt and Sobel Gradient Filter Use of larger neighborhood to reduce noise (, ) (, ) (, ) h= 1 ( 1, ) ( 1, ) f x y f x+ h y f x h y f x+ y f x y = limh 0 x h Prewitt filter: 3 point neighborhood Strong effect on horizontal and vertical edges Direction dependent Sobel filter: Weighted smoothing Slightly directional (horizontal and vertical edges) Most popular gradient filter , ,
 ( )) ( ( ) ( )) f ( x+ 1, y) + f ( x 1, y) f ( x, y) The second")
 (, ) f xy f xy ( ) f x, y + x The corresponding 1D kernel matrices y [")
12 Sobel Filter Example Laplace Filter ( nd Derivation) The second derivation in x-direction: gxx = gx+ 1 gx = f x+ 1, y f x, y f x, y f x 1, y = ( ( ) ( )) ( ( ) ( )) f ( x+ 1, y) + f ( x 1, y) f ( x, y) The second derivation y-direction g yy = f ( x, y+ 1 ) + f ( x, y 1) f ( x, y) The Laplace operator is given by the sum of the second partial derivations (, ) (, ) f xy f xy ( ) f x, y + x The corresponding 1D kernel matrices y [ 1 1] 1 1
 Laplace Operator")
13 D Laplace Filter In the D case the Laplace operator is: (, ) ( 1, ) ( 1, ) (, 1 ) (, 1) 4 (, ) = xx + yy = f xy g g f x y f x y f xy f xy f xy 4 neighborhood kernel: neighborhood kernel: Properties: Rotation invariant Sensitive to noise Strong detection of single points, thin lines, and end of lines (only 1 pixel thick) Laplace Operator Example

14 Laplacian of Gaussian As the Laplace filter is sensitive to noise the image should be smoothed before using it. The Laplacian of Gaussian (LOG) combines a low pass filter with a high pass filter, i.e. it smoothes first the image and enhances afterwards the contrast. According to neuro physiological studies this principle is similar to human vision. First a Gaussian filter is applied, followed by a Laplace filter: ( ) ( ) ( ( ) ( )) ( ) = G x, y f x, y G x, y f x, y x 1 x + y (, ) y σ G x y = e πσ σ DOG or Mexican-Hat Operator The LOG can be approximated by the difference of two Gaussian filters with different variances, called also Difference of Gaussian (DOG) or Mexican-Hat Operator because of its shape
15 LOG Example The filter size should be at least 6. In the slide before a 13x13 Filter with Sigma = 1.5 was used. It is given by: Edge detection Edge detection is an important topic in image processing and feature extraction. With gradient filters edges can be enhanced. However these filters are very sensitive for noise It is necessary to smooth images beforehand.
16 Edge detection: Thresholds A simple method for detecting edges consists in enhancing edges with a gradient filter then to apply thresholding to label the edges by choosing a threshold and defining all pixels that are larger than the threshold T as edge pixels. However in practice this method is sensitive to noise and doesn't work well. The choice of the threshold value is critical. Examples of Thresholding The following images have been processed with a Gaussian filter (3x3, 1), a Sobel filter, and labeled by thresholding with different threshold values (00, 300, 400, 500). Low threshold values segment also noisy parts High thresholds miss weak edges.
17 Threshold: 00 Threshold: 300
18 Threshold: 400 Threshold: 500


,")
19 Zero Crossings with Laplacians Another possibility for detecting edges in images consists in using Laplacian filters, and in marking the zero crossings as edges. This procedure produces sharp edges but is strongly disturbed by the presence of noise. Example of Zero Crossings Two LOG (default sigma ), automatic threshold 0.07 threshold 0
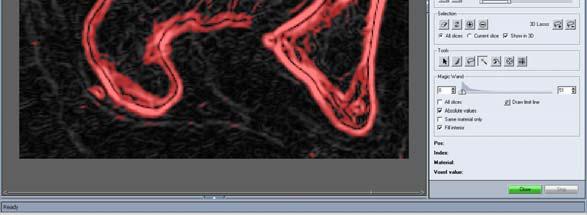
20 Canny method The Canny method applies two thresholds to the gradient: a high threshold for low edge sensitivity and a low threshold for high edge sensitivity. The method starts with the low sensitivity result and then grows it to include connected edge pixels from the high sensitivity result. This helps fill in gaps in the detected edges. The Canny method is robust and is frequently used in practice Canny Method: Principle First the image is smoothed with a Gaussian kernel. Then a gradient image is produced. Next the regions around local maxima are suppressed in order to produce only one pixel large edges. Then the edges are refined by a two threshold method. If a pixel has a value larger than the higher threshold then it is immediately recognized as edge pixel. If a value is below the lower threshold then the pixel is immediately rejected. If the pixel value is between both thresholds then it is only accepted if there exists a path to an edge pixel whose value is larger than the higher threshold.

21 Canny Method: Example Canny method for edge detection applied on 8bit JPG image, Threshold Min Max: , Sigma Gauss: 1
Edge Detection Lecture 03 Computer Vision
 Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
Lecture: Edge Detection
 CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
Lecture 4: Image Processing
 Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Part 3: Image Processing
 Part 3: Image Processing Moving Window Transform Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 62 1 Examples of linear / non-linear filtering 2 Moving window transform 3 Gaussian
Part 3: Image Processing Moving Window Transform Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 62 1 Examples of linear / non-linear filtering 2 Moving window transform 3 Gaussian
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
Edge detection. Gradient-based edge operators
 Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Image Processing. Traitement d images. Yuliya Tarabalka Tel.
 Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Neighborhood operations
 Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
CS 4495 Computer Vision. Linear Filtering 2: Templates, Edges. Aaron Bobick. School of Interactive Computing. Templates/Edges
 CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Filtering and Enhancing Images
 KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES
 SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES 1 B.THAMOTHARAN, 2 M.MENAKA, 3 SANDHYA VAIDYANATHAN, 3 SOWMYA RAVIKUMAR 1 Asst. Prof.,
SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES 1 B.THAMOTHARAN, 2 M.MENAKA, 3 SANDHYA VAIDYANATHAN, 3 SOWMYA RAVIKUMAR 1 Asst. Prof.,
Comparison between Various Edge Detection Methods on Satellite Image
 Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Image processing. Reading. What is an image? Brian Curless CSE 457 Spring 2017
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
What is an edge? Paint. Depth discontinuity. Material change. Texture boundary
 EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
Concepts in. Edge Detection
 Concepts in Edge Detection Dr. Sukhendu Das Deptt. of Computer Science and Engg., Indian Institute of Technology, Madras Chennai 600036, India. http://www.cs.iitm.ernet.in/~sdas Email: sdas@iitm.ac.in
Concepts in Edge Detection Dr. Sukhendu Das Deptt. of Computer Science and Engg., Indian Institute of Technology, Madras Chennai 600036, India. http://www.cs.iitm.ernet.in/~sdas Email: sdas@iitm.ac.in
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Point and Spatial Processing
 Filtering 1 Point and Spatial Processing Spatial Domain g(x,y) = T[ f(x,y) ] f(x,y) input image g(x,y) output image T is an operator on f Defined over some neighborhood of (x,y) can operate on a set of
Filtering 1 Point and Spatial Processing Spatial Domain g(x,y) = T[ f(x,y) ] f(x,y) input image g(x,y) output image T is an operator on f Defined over some neighborhood of (x,y) can operate on a set of
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
SECTION 5 IMAGE PROCESSING 2
 SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
Image Processing
 Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Sobel Edge Detection Algorithm
 Sobel Edge Detection Algorithm Samta Gupta 1, Susmita Ghosh Mazumdar 2 1 M. Tech Student, Department of Electronics & Telecom, RCET, CSVTU Bhilai, India 2 Reader, Department of Electronics & Telecom, RCET,
Sobel Edge Detection Algorithm Samta Gupta 1, Susmita Ghosh Mazumdar 2 1 M. Tech Student, Department of Electronics & Telecom, RCET, CSVTU Bhilai, India 2 Reader, Department of Electronics & Telecom, RCET,
EN1610 Image Understanding Lab # 3: Edges
 EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
Segmentation I: Edges and Lines
 Segmentation I: Edges and Lines Prof. Eric Miller elmiller@ece.tufts.edu Fall 2007 EN 74-ECE Image Processing Lecture 8-1 Segmentation Problem of breaking an image up into regions are are interesting as
Segmentation I: Edges and Lines Prof. Eric Miller elmiller@ece.tufts.edu Fall 2007 EN 74-ECE Image Processing Lecture 8-1 Segmentation Problem of breaking an image up into regions are are interesting as
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge Detection (with a sidelight introduction to linear, associative operators). Images
. Images") Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Biomedical Image Analysis. Point, Edge and Line Detection
 Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
EECS490: Digital Image Processing. Lecture #19
 Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director of Technology, OTTE, NEW YORK
 International Journal of Science, Environment and Technology, Vol. 3, No 5, 2014, 1759 1766 ISSN 2278-3687 (O) PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director
International Journal of Science, Environment and Technology, Vol. 3, No 5, 2014, 1759 1766 ISSN 2278-3687 (O) PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director
Prof. Feng Liu. Winter /15/2019
 Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Outlines. Medical Image Processing Using Transforms. 4. Transform in image space
 Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Linear Operations Using Masks
 Linear Operations Using Masks Masks are patterns used to define the weights used in averaging the neighbors of a pixel to compute some result at that pixel Expressing linear operations on neighborhoods
Linear Operations Using Masks Masks are patterns used to define the weights used in averaging the neighbors of a pixel to compute some result at that pixel Expressing linear operations on neighborhoods
Edge Detection. CMPUT 206: Introduction to Digital Image Processing. Nilanjan Ray. Source:
 Edge Detection CMPUT 206: Introduction to Digital Image Processing Nilanjan Ray Source: www.imagingbook.com What are edges? Are image positions where local image intensity changes significantly along a
Edge Detection CMPUT 206: Introduction to Digital Image Processing Nilanjan Ray Source: www.imagingbook.com What are edges? Are image positions where local image intensity changes significantly along a
Digital filters. Remote Sensing (GRS-20306)
") Digital filters Remote Sensing (GRS-20306) Digital filters Purpose Operator Examples Properties (L&K pp. 494-499 and section 7.5) Digital filters and RS images Local operation by "mask" or "window" or
Digital filters Remote Sensing (GRS-20306) Digital filters Purpose Operator Examples Properties (L&K pp. 494-499 and section 7.5) Digital filters and RS images Local operation by "mask" or "window" or
Noise Model. Important Noise Probability Density Functions (Cont.) Important Noise Probability Density Functions
 Important Noise Probability Density Functions") Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Assignment 3: Edge Detection
 Assignment 3: Edge Detection - EE Affiliate I. INTRODUCTION This assignment looks at different techniques of detecting edges in an image. Edge detection is a fundamental tool in computer vision to analyse
Assignment 3: Edge Detection - EE Affiliate I. INTRODUCTION This assignment looks at different techniques of detecting edges in an image. Edge detection is a fundamental tool in computer vision to analyse
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
Edge Detection. Today s reading. Cipolla & Gee on edge detection (available online) From Sandlot Science
 From Sandlot Science") Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Edges, interpolation, templates. Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth)
") Edges, interpolation, templates Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Gradients and edges edges are points of large gradient magnitude edge detection strategy 1. determine
Edges, interpolation, templates Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Gradients and edges edges are points of large gradient magnitude edge detection strategy 1. determine
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Coarse-to-fine image registration
 Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Image Processing. BITS Pilani. Dr Jagadish Nayak. Dubai Campus
 Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
EECS 556 Image Processing W 09. Image enhancement. Smoothing and noise removal Sharpening filters
 EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
Image Enhancement: To improve the quality of images
 Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
2D Image Processing INFORMATIK. Kaiserlautern University. DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
 2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
What will we learn? Neighborhood processing. Convolution and correlation. Neighborhood processing. Chapter 10 Neighborhood Processing
 What will we learn? Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 10 Neighborhood Processing By Dr. Debao Zhou 1 What is neighborhood processing and how does it differ from point
What will we learn? Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 10 Neighborhood Processing By Dr. Debao Zhou 1 What is neighborhood processing and how does it differ from point
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Image Processing. Daniel Danilov July 13, 2015
 Image Processing Daniel Danilov July 13, 2015 Overview 1. Principle of digital images and filters 2. Basic examples of filters 3. Edge detection and segmentation 1 / 25 Motivation For what image processing
Image Processing Daniel Danilov July 13, 2015 Overview 1. Principle of digital images and filters 2. Basic examples of filters 3. Edge detection and segmentation 1 / 25 Motivation For what image processing
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
Lectures Remote Sensing
 Lectures Remote Sensing DIGITAL FILTERS dr.ir. Jan Clevers Centre of Geo-Information Environmental Sciences Wageningen UR Purpose Digital Filters Operator Examples Properties (L&K pp. 494-499 and section
Lectures Remote Sensing DIGITAL FILTERS dr.ir. Jan Clevers Centre of Geo-Information Environmental Sciences Wageningen UR Purpose Digital Filters Operator Examples Properties (L&K pp. 494-499 and section
Edge detection. Stefano Ferrari. Università degli Studi di Milano Elaborazione delle immagini (Image processing I)
") Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Line, edge, blob and corner detection
 Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
5. Feature Extraction from Images
 5. Feature Extraction from Images Aim of this Chapter: Learn the Basic Feature Extraction Methods for Images Main features: Color Texture Edges Wie funktioniert ein Mustererkennungssystem Test Data x i
5. Feature Extraction from Images Aim of this Chapter: Learn the Basic Feature Extraction Methods for Images Main features: Color Texture Edges Wie funktioniert ein Mustererkennungssystem Test Data x i
Feature Detectors - Sobel Edge Detector
 Page 1 of 5 Sobel Edge Detector Common Names: Sobel, also related is Prewitt Gradient Edge Detector Brief Description The Sobel operator performs a 2-D spatial gradient measurement on an image and so emphasizes
Page 1 of 5 Sobel Edge Detector Common Names: Sobel, also related is Prewitt Gradient Edge Detector Brief Description The Sobel operator performs a 2-D spatial gradient measurement on an image and so emphasizes
How and what do we see? Segmentation and Grouping. Fundamental Problems. Polyhedral objects. Reducing the combinatorics of pose estimation
 Segmentation and Grouping Fundamental Problems ' Focus of attention, or grouping ' What subsets of piels do we consider as possible objects? ' All connected subsets? ' Representation ' How do we model
Segmentation and Grouping Fundamental Problems ' Focus of attention, or grouping ' What subsets of piels do we consider as possible objects? ' All connected subsets? ' Representation ' How do we model
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
Edge Detection. EE/CSE 576 Linda Shapiro
 Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS
 COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS Shubham Saini 1, Bhavesh Kasliwal 2, Shraey Bhatia 3 1 Student, School of Computing Science and Engineering, Vellore Institute of Technology, India,
COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS Shubham Saini 1, Bhavesh Kasliwal 2, Shraey Bhatia 3 1 Student, School of Computing Science and Engineering, Vellore Institute of Technology, India,
Image gradients and edges April 11 th, 2017
 4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April 10 th, 2018
 Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Vivekananda. Collegee of Engineering & Technology. Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT.
 Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Lesson 6: Contours. 1. Introduction. 2. Image filtering: Convolution. 3. Edge Detection. 4. Contour segmentation
 . Introduction Lesson 6: Contours 2. Image filtering: Convolution 3. Edge Detection Gradient detectors: Sobel Canny... Zero crossings: Marr-Hildreth 4. Contour segmentation Local tracking Hough transform
. Introduction Lesson 6: Contours 2. Image filtering: Convolution 3. Edge Detection Gradient detectors: Sobel Canny... Zero crossings: Marr-Hildreth 4. Contour segmentation Local tracking Hough transform
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Image gradients and edges
 Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Announcements. Edge Detection. An Isotropic Gaussian. Filters are templates. Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3.
 Announcements Edge Detection Introduction to Computer Vision CSE 152 Lecture 9 Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3. Reading from textbook An Isotropic Gaussian The picture
Announcements Edge Detection Introduction to Computer Vision CSE 152 Lecture 9 Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3. Reading from textbook An Isotropic Gaussian The picture