Improving Initial Estimations for Structure from Motion Methods
|
|
|
- Denis Wilcox
- 5 years ago
- Views:
Transcription




1 Improving Initial Estimations for Structure from Motion Methods University of Bonn
2 Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component Merging Results Conclusion


3 Motivation SfM used in: Computer Vision Photogrammetry Computer Graphics Autonomous Systems
 Snavely")

4 Motivation (cont'd) Snavely et al Phototourism Microsoft Photosynth

5 Structure from Motion From (unordered) photo collection: sparse point cloud of scene geometry positions and orientations of cameras
6 Structure from Motion (cont'd) Top-Down -Approach: widely used Brown & Lowe 2005, Snavely et al (freely available bundler ), Microsoft Photosynth... camera registration & point triangulation initial estimate optimization images points & cameras
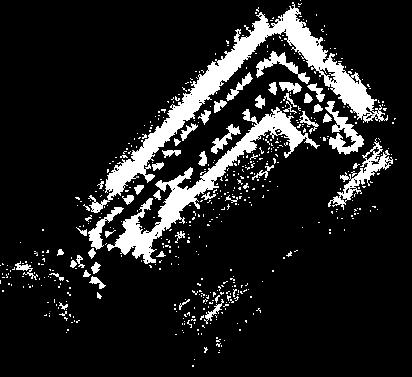
7 Example: Hallway
8 Example: Hallway


9 Example: Hallway Example: corridor
10 Example: Hallway (cont'd)
11 Example: Hallway (cont'd)
12 Motivation (cont'd) Find initial model: current methods sometimes fail to find one single model use more input data expensive? impossible? use our method works in many cases speeds up the process

13 Motivation (cont'd) Find initial model: current methods sometimes fail to find one single model use more input data expensive? impossible? use our method works in many cases speeds up the process
14 Basics Image Plane Camera Lens Object
15 Basics (cont'd) x x' x '=C x Object (world coordinates) Image (image coordinates) Projection Matrix
16 Basics (cont'd) x2 x1' x2' Measure x1 Calculate x '=C x
17 Relative Orientation 2 cameras find homologous points rays through points and projection centers intersection of rays = original point in 3D relative to arbitrary coordinate system David Nistér (2004): directly solvable with 5 homologous points
18 Bundle Adjustment Triggs et al., 1999 Maximum Likelihood Estimator gold standard in image registration global solution for arbitrary number of correspondences (or images and 3D points) easily stuck in bad local minimum requires good initial (global) model
19 Structure from Motion 1.find global initial estimation 2.run bundle adjustment How to find homologous points? How to get initial global model?
20 Feature Detection & Matching How to find homologous points? manually (user clicks on pixels): error prone lengthy and dull activity automatic feature detection and matching: W. Förstner, 1986: detection and matching of points D.G. Lowe, 2004: SIFT - scale invariant features recent research: affine transformation invariant features
21 Feature Detection & Matching (cont'd)


22 Feature Detection & Matching (cont'd)
23 Feature Detection & Matching (cont'd) problem with outliers use RANSAC for outlier detection
24 Feature Detection & Matching (cont'd) problem with outliers use RANSAC for outlier detection works well with enough detected correspondences
25 Initial Global Estimation how to find initial global model? example: 3 images easy: create stereo model with 2 images add 3rd image requires at least one common point! Feature detected and matched in all 3 images, not removed by RANSAC!
26 Initial Global Estimation (cont'd) Example: bundler's approach to an initial estimation choose initial pair (stereo model) add next image with points observed by 2 registered cameras to global model (run small bundle-adjustment on new camera)

")

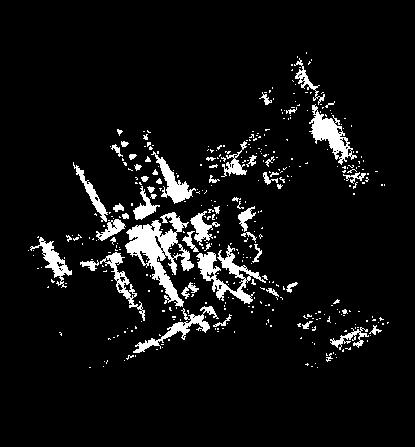
27 Example: Store (checkout area)
28 Example: Store (checkout area)

29 Example: Store (checkout area)

30 Problems too few features: there should be cameras! no feature seen by 2 registered cameras bundler fails to add next image restart with unregistered images segmentation in several components
 building global model slow and memory")
31 Problems (cont'd) Speed and memory consumption: feature matching is O(n2) building global model slow and memory consuming
32 Component Merging practical experience: different components have common images




33 Component Merging practical experience: different components have common images correspondence!




34 Component Merging (cont'd) 2 common images: orientation position scale can combine components! + =
35 Component Merging (cont'd) We propose: register images like before restart process: pick still unregistered images as initial pair merge resulting components afterwards
36 Component Merging (cont'd) 2 components, 2 cameras overlap use RANSAC to eliminate outliers = incorrectly registered cameras find optimal transformation (least squared sense) transform cameras and points in 2nd component remove doubled points and cameras



37 Component Merging (cont'd) 3 components?



38 Component Merging (cont'd) connection graph of components
39 Tree Optimization With connection graph: find minimal spanning tree minimizes accumulation of errors graph might contain loops possibly useful see Bendels et al. 2004
40 Component Merging (cont'd) only small overlap between components fast calculation of transformation sparse pointcloud only few ops when merging (< 1M) merging components is a matter of seconds bundle adjustment step as post processing accumulation of small errors negligible
41 Results - Hallway example 480 images

42 Results - Hallway example 480 images sparse feature environment

43 Results - Hallway example 480 images sparse feature environment unwanted segmentation into two components 14 images overlap
44 Results - Hallway example

45 Results - Hallway example with bundler or Photosynth: always 2 components one single model possible using our method


46 Results - Store example 1749 images

47 Results - Store example 1749 images feature rich environment



48 Results - Store example 1749 images feature rich environment manually divided input set of images: 7 components about 10 images overlap

49 Results - Hallway example

50 Results - Hallway example using bundler with all images at once: ran for several days Then exceeded 8GB of memory and crashed using manually divided set and our method: parallel computation possible: ~22 h on four Q6600 does not exceed memory
51 Conclusion improved initial estimation of scene model applicable in many situations reduces time and memory consumption no guarantee if segmented unintentionally future work: Automatic partition of input set (e.g. histogram based) Comparison to Bottom-Up approaches
52 Thank you! Questions?
53 Basics (cont'd) x x' x x' y y ' =K R t z 1 1
54 Basics (cont'd) 5 intrinsic parameters 6 extrinsic parameters: rotation R translation t x x' y y ' =K R t z 1 1
55 Basics (cont'd) Common simplification: Pinhole-camera Intrinsic calibration: camera setup c: camera constant h h: principal point s: axis shear factor c m: axis scale factor c s hx K = 0 c 1 m h y image plane y x
56 Relative Orientation (cont'd) x1=c 1 x x 2=C 2 x 1 1 C 1 x1 =C 2 x 2 =x x x1 C1 C2 x2
57 Arbitrary Scale in Stereo Models 1.5w w 1.5z z c c i b i 1.5b
58 Combining Stereo Models (cont'd) For triplets of images: 2 stereo models & common camera: combining not possible at least one common Feature detected and matched in all 3 images, point x x' in first relative model x'' in second relative model not removed by RANSAC! x ' t scale s= x ' ' t
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Geometry for Computer Vision
 Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Telecommunications Engineering Thesis
 Telecommunications Engineering Thesis Validating a Structure from Motion Tool for use on Videos recorded from an Unmanned Aerial Vehicle (UAV) David Núñez Clemente david.nunez.clemente@gmail.com Universidad
Telecommunications Engineering Thesis Validating a Structure from Motion Tool for use on Videos recorded from an Unmanned Aerial Vehicle (UAV) David Núñez Clemente david.nunez.clemente@gmail.com Universidad
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry
 CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Reconstruction of a Hopkins Landmark
 3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Cluster-based 3D Reconstruction of Aerial Video
 Cluster-based 3D Reconstruction of Aerial Video Scott Sawyer (scott.sawyer@ll.mit.edu) MIT Lincoln Laboratory HPEC 12 12 September 2012 This work is sponsored by the Assistant Secretary of Defense for
Cluster-based 3D Reconstruction of Aerial Video Scott Sawyer (scott.sawyer@ll.mit.edu) MIT Lincoln Laboratory HPEC 12 12 September 2012 This work is sponsored by the Assistant Secretary of Defense for
Lecture 8.2 Structure from Motion. Thomas Opsahl
 Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
CS231M Mobile Computer Vision Structure from motion
 CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Last lecture. Passive Stereo Spacetime Stereo
 Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES
 COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Week 2: Two-View Geometry. Padua Summer 08 Frank Dellaert
 Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
CSCI 5980/8980: Assignment #4. Fundamental Matrix
 Submission CSCI 598/898: Assignment #4 Assignment due: March 23 Individual assignment. Write-up submission format: a single PDF up to 5 pages (more than 5 page assignment will be automatically returned.).
Submission CSCI 598/898: Assignment #4 Assignment due: March 23 Individual assignment. Write-up submission format: a single PDF up to 5 pages (more than 5 page assignment will be automatically returned.).
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
A New Representation for Video Inspection. Fabio Viola
 A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds
 www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
www.crs4.it/vic/ vcg.isti.cnr.it/ Fast and robust techniques for 3D/2D registration and photo blending on massive point clouds R. Pintus, E. Gobbetti, M.Agus, R. Combet CRS4 Visual Computing M. Callieri
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
EECS 442: Final Project
 EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
3D reconstruction class 11
 3D reconstruction class 11 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan. 14, 16
3D reconstruction class 11 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan. 14, 16
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Feature Matching and RANSAC
 Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity
 Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
Multiview Photogrammetry 3D Virtual Geology for everyone
 Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Robust Geometry Estimation from two Images
 Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
From Orientation to Functional Modeling for Terrestrial and UAV Images
 From Orientation to Functional Modeling for Terrestrial and UAV Images Helmut Mayer 1 Andreas Kuhn 1, Mario Michelini 1, William Nguatem 1, Martin Drauschke 2 and Heiko Hirschmüller 2 1 Visual Computing,
From Orientation to Functional Modeling for Terrestrial and UAV Images Helmut Mayer 1 Andreas Kuhn 1, Mario Michelini 1, William Nguatem 1, Martin Drauschke 2 and Heiko Hirschmüller 2 1 Visual Computing,
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Humanoid Robotics. Projective Geometry, Homogeneous Coordinates. (brief introduction) Maren Bennewitz
 Maren Bennewitz") Humanoid Robotics Projective Geometry, Homogeneous Coordinates (brief introduction) Maren Bennewitz Motivation Cameras generate a projected image of the 3D world In Euclidian geometry, the math for describing
Humanoid Robotics Projective Geometry, Homogeneous Coordinates (brief introduction) Maren Bennewitz Motivation Cameras generate a projected image of the 3D world In Euclidian geometry, the math for describing
E27 Computer Vision - Final Project: Creating Panoramas David Nahmias, Dan Spagnolo, Vincent Stigliani Professor Zucker Due 5/10/13
 E27 Computer Vision - Final Project: Creating Panoramas David Nahmias, Dan Spagnolo, Vincent Stigliani Professor Zucker Due 5/10/13 Sources Brown, M.; Lowe, D.G., "Recognising panoramas," Computer Vision,
E27 Computer Vision - Final Project: Creating Panoramas David Nahmias, Dan Spagnolo, Vincent Stigliani Professor Zucker Due 5/10/13 Sources Brown, M.; Lowe, D.G., "Recognising panoramas," Computer Vision,
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Image Based Rendering. D.A. Forsyth, with slides from John Hart
 Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Computational Optical Imaging - Optique Numerique. -- Single and Multiple View Geometry, Stereo matching --
 Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Automatic Panoramic Image Stitching. Dr. Matthew Brown, University of Bath
 Automatic Panoramic Image Stitching Dr. Matthew Brown, University of Bath Automatic 2D Stitching The old days: panoramic stitchers were limited to a 1-D sweep 2005: 2-D stitchers use object recognition
Automatic Panoramic Image Stitching Dr. Matthew Brown, University of Bath Automatic 2D Stitching The old days: panoramic stitchers were limited to a 1-D sweep 2005: 2-D stitchers use object recognition
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
CS 664 Structure and Motion. Daniel Huttenlocher
 CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Structure from Dense Paired Stereo Reconstruction
 CS231A FINAL REPORT, JUNE 2016, STANFORD UNIVERSITY 1 Structure from Dense Paired Stereo Reconstruction Davis Wertheimer, Leah Kim, James Cranston {daviswer, leahkim, jamesc4}@stanford.edu Abstract We
CS231A FINAL REPORT, JUNE 2016, STANFORD UNIVERSITY 1 Structure from Dense Paired Stereo Reconstruction Davis Wertheimer, Leah Kim, James Cranston {daviswer, leahkim, jamesc4}@stanford.edu Abstract We
Contents. 1 Introduction Background Organization Features... 7
 Contents 1 Introduction... 1 1.1 Background.... 1 1.2 Organization... 2 1.3 Features... 7 Part I Fundamental Algorithms for Computer Vision 2 Ellipse Fitting... 11 2.1 Representation of Ellipses.... 11
Contents 1 Introduction... 1 1.1 Background.... 1 1.2 Organization... 2 1.3 Features... 7 Part I Fundamental Algorithms for Computer Vision 2 Ellipse Fitting... 11 2.1 Representation of Ellipses.... 11
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal: