High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data
|
|
|
- Angelina Glenn
- 5 years ago
- Views:
Transcription



1 ELMF 2013, November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at With contributions from: Markus Hollaus, Milutin Milenković, Grafl Andreas, Pfeifer Norbert, Reik Leiterer Research Group Photogrammetry Department of Geodesy and Geoinformation Vienna University of Technology

 vs.")

2 Motivation Radiative transfer modeling ( virtual forest scenes) Synthetic models Software packages of computer graphics Often too generalized and less detail Do not follow the natural structure of vegetation Models extracted from real datasets Data from terrestrial laser scanning (TLS) Data extracted from images Manual or automatic modeling Spatially explicit tree models needed Tree model (TLS) Tree model (TLS) vs. pointcloud Requires description up to the needle scale to describe the scattering behavior high level of detail (LOD) This LOD not possible with TLS in most cases Only the main branching structure extractable Needle structure needs to be attached to tree model Fusion of models obtained from TLS data and triangulating scanner data ELMF 2013, November Amsterdam, The Netherlands 2
3 Overview Part1 Part 2 Reconstruction of wooden tree parts (stem and branches) from terrestrial laser scanning data Reconstruction of foliage / needles from triangulating scanner data Data fusion completing the tree models Final part ELMF 2013, November Amsterdam, The Netherlands 3
 from terrestrial laser scanning data 12.11.")
4 Part 1 Reconstruction of wooden tree parts (stem and branches) from terrestrial laser scanning data

5 Study Area Tharandt, Germany (South of Dresden) Old coniferous stand with little understory Homogenous, monospecies Mainly very old spruce trees with heights larger than 30 m investigated area is approximately m in size ELMF 2013, November Amsterdam, The Netherlands 5
: 5 mm TS TS TLS measurements 2 nd order network TS 32 spherical targets, 12 planar")

6 TLS data acquisition Georeferencing 1 st order network GPS Survey grade GPS + Total Station GPS 3 Reference points outside forest Traject trough forest 12 planar Targets measured Free network adjustment Average deviation of planar targets (with respect to the total station data): 5 mm TS TS TLS measurements 2 nd order network TS 32 spherical targets, 12 planar targets Z+F 5006i (phase shift scanner) 34 viewpoints measured in two days point density: 16 points per 10m scan time: approx. 7 min per viewpoint In each scan approximately 6 targets visible 3D bundle block adjustment Trafo parameters The relative orientation shows an average target deviation of 4 mm GPS ELMF 2013, November Amsterdam, The Netherlands 6


7 Equirectangular Projection Equirectangular Projection TLS angle increments and measured ranging values are plotted in 2D TLS covers 360 Hz and 310 V in one scan map of x 8776 pixels (stepwidth/pixelsize is ) Maps processed for all TLS viewpoints -> Intensity or horizontal Range are visualized Different reflective properties of targets wooden tree parts are interpretable Horizontal increments r Vertical increments ELMF 2013, November Amsterdam, The Netherlands 7



8 Extracting the 3D Skeleton from 2D maps Digitizing in 2D maps -> stem and branches Easy navigation for Interpreter -> digitization is semi automatically Observation angles and range known for each point Skeleton and diameter extracted during digitizing Completing tree skeletons by digitizing in different maps Theoretically extractable diameters: Depending on scan resolution and range Scan res: 1.6 mm point 5m range 5m range; 15m range ELMF 2013, November Amsterdam, The Netherlands 8


9 Workflow tree models from TLS data Preprocessing Digitization process Volumetric models ELMF 2013, November Amsterdam, The Netherlands 9


10 Digitization process Stepwise reconstruction of the scene Animation from 20 TLS view points Transformation parameters known from registration SOCS scan1 WCS SOCS scan2 WCS etc. Old structures transformed to new viewpoint / map Gross errors become visible after transformation -> instant Check Use of human knowledge -> local data gaps can be bridged Extrusion of skeleton to cylinders by using stored radii Trees are displayed as cylinder models ELMF 2013, November Amsterdam, The Netherlands 10

11 Cylinder Model of the forest scene (II) ELMF 2013, November Amsterdam, The Netherlands 11
 Scans were only performed from the forest floor Map")

12 Volumetric models Validation (I) Trees modeled up to approx. ¾ of total height TLS data are limited in upper region (data gaps) Scans were only performed from the forest floor Map distortions in the upper region Polar region of the map (flattening of sphere to 2D plane) Depending on distance scanner tree Cylinders are extruded and connected correctly Multiple transformations between maps are accurate enough Upper part of intensity map ELMF 2013, November Amsterdam, The Netherlands 12



13 Volumetric models Validation (II) In total 5 randomly picked sample trees were validated Test 1: 3D deviations Stdev.: 1.0 cm to 2.0 cm Test 2: Stem validation Stdev. Of Residuals: 0.9 cm to 2.0 cm Conclusion: Trees were modeled correctly ELMF 2013, November Amsterdam, The Netherlands 13

14 Part 2 Reconstruction of foliage / needles from triangulating scanner data

15 Object Conifer branch from the study area End part of a fir (Abies alba) tree limb Consist of: one primary branch several secondary branches shoots needles Spreading approximately in one plane 80cm c.a. 80cm long c.a. 40cm side spreading from the primary branch 80cm ELMF 2013, November Amsterdam, The Netherlands 15


16 Measuring Instrument Measuring Arm (METRIS MCA, 3600 M7) Triangulating laser scanner Oriented strips in the arm coordinate system Heterogeneous resolution across strip: 0,05 mm along strip: c.a. 0,5 mm (depends on movement) Operational range up to c.a. 1,5m Operational limit limited number of points in processing ELMF 2013, November Amsterdam, The Netherlands 16


17 Measuring Acquisition method I Two-stepped scanning strategy: Primary branch scanning Separation of the secondary branches and its independent scanning Mounting Co-registration Spherical heads of pins used as targets ELMF 2013, November Amsterdam, The Netherlands 17


18 Measuring Co-registration ELMF 2013, November Amsterdam, The Netherlands 18


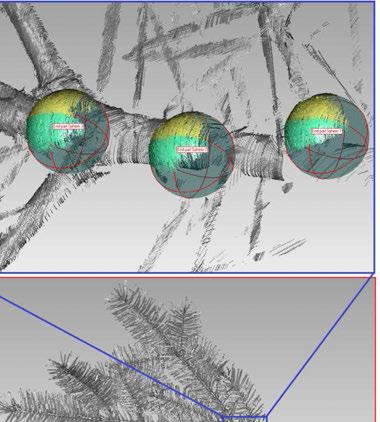
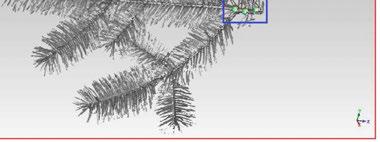
19 Measuring Acquired point cloud Reregistered pointcloud 13 single parts Brown part (main coord. System) > 40M points Terminology: Color indicates different scans Φ= 2,2 mm ELMF 2013, November Amsterdam, The Netherlands 19



20 Modeling Scanned part wise: Modeling branch structure Modeling shoot Cloning the shoot model Parts combined into the final branch model ELMF 2013, November Amsterdam, The Netherlands 20
: 2 points - starting and ending")

21 Modeling the shoot Shoot s needles 3D Lines Shoot s stem 3D Polyline Manual digitization Topologically correct model Model Coordinate System (MCS): 2 points - starting and ending point of the 3D polyline 1 plane fitted plane trough end points of the 3D lines Reference point 2 Reference point ELMF 2013, November Amsterdam, The Netherlands 21
 classified point cloud b) structure points c) skeleton Voxelization - 1 mm voxel size ~ width of the needle Local voxel density spherical kernel of 2 voxel radius Thresholding")
22 Topologically corrected 3D Polylines Manual digitization Object Coordinate System (OCS) Complex structure + needles = low accessibility point reduction procedure Modeling branch structure Point reduction: a) classified point cloud b) structure points c) skeleton Voxelization - 1 mm voxel size ~ width of the needle Local voxel density spherical kernel of 2 voxel radius Thresholding Classification to structure and needle points ELMF 2013, November Amsterdam, The Netherlands 22


 Based on SQL queries in a database 12.11.")
23 Transformation of the shoot model: MCS (Model) OCS (Object) Cloning the shoot model (I) 2 points: starting and ending point of the segment 2 reference points of the shoot model Plane: Estimated local plane for each segment Shoot reference plane Cloning rules: End skeleton segments Whole shoot model Non-end skeleton segments Lower part of the shoot model. If skeleton segment is larger than the shoot model Lower part of the shoot model used to bridge the remaining part If skeleton segment is smaller than the lower part of the shoot model Section of lower part is used (From Reference point 1 to 2 the stations of every needle are previously derived) Based on SQL queries in a database ELMF 2013, November Amsterdam, The Netherlands 23

24 Cloning the shoot model (II) point cloud model ELMF 2013, November Amsterdam, The Netherlands 24

25 Modeled shoots Ready for cloning 3 rd year shoot 1 st year shoot 2 nd year shoot ELMF 2013, November Amsterdam, The Netherlands 25

 Thresholding of the derived products classification 12.11.")
26 Classification of the TLS point cloud (I) TLS point cloud Voxelized tree model Classified TLS point cloud Classification of the point cloud into woody and green elements Input: Reconstructed cylinder model + TLS point cloud Cylinder model and the TLS data transformed to voxel models calculation of distance model: green to woody elements calculation of the density map (for green) Thresholding of the derived products classification ELMF 2013, November Amsterdam, The Netherlands 26




27 Classification of the TLS point cloud (II) Canopy center derived Maximum of green voxel distribution in vertical extent Fill the less visible upper part in the canopy (canopy center to top of canopy): Alpha hull of the canopy based on point cloud Canopy center to top fill the hull with voxels filling randomly distributed based on a density threshold Shortest distance voxel alpha hull calculated Based on this distances the canopy is divided in different Zones classified voxel model classified TLS point cloud ELMF 2013, November Amsterdam, The Netherlands 27
 preserve the natural geometry / radiative transfer characteristics The determination of clone position for the lower part (2/3) is")
28 Shoot cloning Shoot assignment for the upper crown part (1/3) based on the zones different shoots are cloned to the voxel positions Used: vector representation of the shoots LoD 1-3 years Thinout of clones shoots in the crown zone 1 50%; zone 2 35%; zone 3 20%) preserve the natural geometry / radiative transfer characteristics The determination of clone position for the lower part (2/3) is purely data driven Orientation of the shoot within each voxel: Up to the canopy center orientation to the next woody element based on the distance map (data driven orientation) If no woody element available: Elements in the inner zones are orientated vertically and towards the stem From the canopy center to the top of the canopy: orientation to the canopy center and/or based on the distance map to the next woody element Alpha hull of the voxel model of the crown Zone 1 Zone 2 Zone 3 Top crown height Canopy center Zone 2 Zone 1 Crown height 2/3 1/3 Base crown height ELMF 2013, November Amsterdam, The Netherlands 28

29 Results (I) Branches / Stem of upper crown obtained by cloning of lower branches / manual interaction ELMF 2013, November Amsterdam, The Netherlands 29
30 Results (II) 5 sample trees ELMF 2013, November Amsterdam, The Netherlands 30


31 Results (II) 5 sample trees ELMF 2013, November Amsterdam, The Netherlands 31

32 Conclusions and outlook Wooden parts of trees can be reconstructed by digitizing in 2D maps The tree models can be completed by digitizing in maps of different viewpoints The cylinder models show a high completeness and correctness for the lower part Reconstruction of upper crown regions is limited Scans from lifting platform? Other projections for the 2D maps? Modeling the shoots based on triangulating scanner data was successful Acquisition method allows independent modeling of scanned parts Shoots could be used to populate the tree models with foliage Cloning approach to simulate the foliage Cloning positions based on TLS data For larger objects, the degree of automation should be increased Automatic extraction of the skeleton needs to be investigated (2D or 3D) The method will be tested on other study areas (already started) ELMF 2013, November Amsterdam, The Netherlands 32

33 Thank you for your attention! Please read our papers: A Practical Approach for Extracting Tree Models in Forest Environments Based on Equirectangular Projections of Terrestrial Laser Scans Lothar Eysn, Norbert Pfeifer, Camillo Ressl, Markus Hollaus, Andreas Grafl, Felix Morsdorf Remote Sens. 2013, 5(11), ; doi: /rs Modeling the tree branch structure at very high resolution Milutin Milenković, Lothar Eysn, Markus Hollaus, Wilfired Karel, Norbert Pfeifer SilviLaser Conference Proceedings", (2012), Paper ID SL le@ipf.tuwien.ac.at ELMF 2013, November Amsterdam, The Netherlands 33
A Practical Approach for Extracting Tree Models in Forest Environments Based on Equirectangular Projections of Terrestrial Laser Scans
 Remote Sens. 2013, 5, 5424-5448; doi:10.3390/rs5115424 Article OPEN ACCESS Remote Sensing ISSN 2072-4292 www.mdpi.com/journal/remotesensing A Practical Approach for Extracting Tree Models in Forest Environments
Remote Sens. 2013, 5, 5424-5448; doi:10.3390/rs5115424 Article OPEN ACCESS Remote Sensing ISSN 2072-4292 www.mdpi.com/journal/remotesensing A Practical Approach for Extracting Tree Models in Forest Environments
A benchmark of single tree detection methods using data from alpine forests
 A benchmark of single tree detection methods using data from alpine forests Lothar Eysn 1, Jean-Matthieu Monnet 2, Markus Hollaus 1 Lothar.Eysn@geo.tuwien.ac.at, jean-matthieu.monnet@irstea.fr 1 Research
A benchmark of single tree detection methods using data from alpine forests Lothar Eysn 1, Jean-Matthieu Monnet 2, Markus Hollaus 1 Lothar.Eysn@geo.tuwien.ac.at, jean-matthieu.monnet@irstea.fr 1 Research
Estimation of elevation dependent deformations of a parabolic reflector of a large radio telescope
 . Estimation of elevation dependent deformations of a parabolic reflector of a large radio telescope 1 Christoph Holst & Heiner Kuhlmann JISDM, 2-4 November 2011, Hong Kong, China . Motivation Laser Scanner
. Estimation of elevation dependent deformations of a parabolic reflector of a large radio telescope 1 Christoph Holst & Heiner Kuhlmann JISDM, 2-4 November 2011, Hong Kong, China . Motivation Laser Scanner
Small-footprint full-waveform airborne LiDAR for habitat assessment in the ChangeHabitats2 project
 Small-footprint full-waveform airborne LiDAR for habitat assessment in the ChangeHabitats2 project Werner Mücke, András Zlinszky, Sharif Hasan, Martin Pfennigbauer, Hermann Heilmeier and Norbert Pfeifer
Small-footprint full-waveform airborne LiDAR for habitat assessment in the ChangeHabitats2 project Werner Mücke, András Zlinszky, Sharif Hasan, Martin Pfennigbauer, Hermann Heilmeier and Norbert Pfeifer
LiDAR and its use for the enhanced forest inventory
 LiDAR and its use for the enhanced forest inventory Richard Fournier Département de géomatique appliquée Workshop of the Canadian Institute of Forestry Corner Brook, Newfoundland, March 27 2013 LiDAR -
LiDAR and its use for the enhanced forest inventory Richard Fournier Département de géomatique appliquée Workshop of the Canadian Institute of Forestry Corner Brook, Newfoundland, March 27 2013 LiDAR -
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV OCT D IMAGE FUSION
 GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING?
 3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING? F. Remondino 1 A. Guarnieri 2 A. Vettore 2 1 Institute of Geodesy and Photogrammetry ETH Hönggerberg - Zurich, Switzerland e-mail:
3D MODELING OF CLOSE-RANGE OBJECTS: PHOTOGRAMMETRY OR LASER SCANNING? F. Remondino 1 A. Guarnieri 2 A. Vettore 2 1 Institute of Geodesy and Photogrammetry ETH Hönggerberg - Zurich, Switzerland e-mail:
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System
 Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
FOR 274: Surfaces from Lidar. Lidar DEMs: Understanding the Returns. Lidar DEMs: Understanding the Returns
 FOR 274: Surfaces from Lidar LiDAR for DEMs The Main Principal Common Methods Limitations Readings: See Website Lidar DEMs: Understanding the Returns The laser pulse travel can travel through trees before
FOR 274: Surfaces from Lidar LiDAR for DEMs The Main Principal Common Methods Limitations Readings: See Website Lidar DEMs: Understanding the Returns The laser pulse travel can travel through trees before
Three-Dimensional Laser Scanner. Field Evaluation Specifications
 Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems
 Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
LiForest Software White paper. TRGS, 3070 M St., Merced, 93610, Phone , LiForest
 0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
Individual Tree Parameters Estimation from Terrestrial Laser Scanner Data
 Environmental Engineering 10th International Conference eissn 2029-7092 / eisbn 978-609-476-044-0 Vilnius Gediminas Technical University Lithuania, 27 28 April 2017 Article ID: enviro.2017.230 http://enviro.vgtu.lt
Environmental Engineering 10th International Conference eissn 2029-7092 / eisbn 978-609-476-044-0 Vilnius Gediminas Technical University Lithuania, 27 28 April 2017 Article ID: enviro.2017.230 http://enviro.vgtu.lt
KEY WORDS: Laser scanning, Close Range, Modelling, Forestry, Automation, Measurement, Algorithms
 AUTOMATIC RECONSTRUCTION OF SINGLE TREES FROM TERRESTRIAL LASER SCANNER DATA Norbert Pfeifer 1, Ben Gorte 1 and Daniel Winterhalder 2 1: Section of Photogrammetry and Remote Sensing, TU Delft, Kluyverweg
AUTOMATIC RECONSTRUCTION OF SINGLE TREES FROM TERRESTRIAL LASER SCANNER DATA Norbert Pfeifer 1, Ben Gorte 1 and Daniel Winterhalder 2 1: Section of Photogrammetry and Remote Sensing, TU Delft, Kluyverweg
Ground-based estimates of foliage cover and LAI: lessons learned, results and implications
 17 th June, 2014 Ground-based estimates of foliage cover and LAI: lessons learned, results and implications William Woodgate william.woodgate@rmit.edu.au Contents Background Part 1 Fieldwork (Completed
17 th June, 2014 Ground-based estimates of foliage cover and LAI: lessons learned, results and implications William Woodgate william.woodgate@rmit.edu.au Contents Background Part 1 Fieldwork (Completed
COMPONENTS. The web interface includes user administration tools, which allow companies to efficiently distribute data to internal or external users.
 COMPONENTS LASERDATA LIS is a software suite for LiDAR data (TLS / MLS / ALS) management and analysis. The software is built on top of a GIS and supports both point and raster data. The following software
COMPONENTS LASERDATA LIS is a software suite for LiDAR data (TLS / MLS / ALS) management and analysis. The software is built on top of a GIS and supports both point and raster data. The following software
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR
 3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
Airborne Laser Scanning for Forest Road Detection
 Interreg Alpine Space project - NEWFOR Project number 2-3-2-FR NEW technologies for a better mountain FORest timber mobilization Priority axis 2 - Accessibility and Connectivity Workpackage 5: Forest accessibility
Interreg Alpine Space project - NEWFOR Project number 2-3-2-FR NEW technologies for a better mountain FORest timber mobilization Priority axis 2 - Accessibility and Connectivity Workpackage 5: Forest accessibility
Automatic image network design leading to optimal image-based 3D models
 Automatic image network design leading to optimal image-based 3D models Enabling laymen to capture high quality 3D models of Cultural Heritage Bashar Alsadik & Markus Gerke, ITC, University of Twente,
Automatic image network design leading to optimal image-based 3D models Enabling laymen to capture high quality 3D models of Cultural Heritage Bashar Alsadik & Markus Gerke, ITC, University of Twente,
Terrestrial Laser Scanning assignment
 Terrestrial Laser Scanning assignment Objective: Underground 3D survey using terrestrial laser scanning Location: Otaniemi campus, Innopoli 3 Business Area Equipment: Faro Focus 3D Methodology: Multiple
Terrestrial Laser Scanning assignment Objective: Underground 3D survey using terrestrial laser scanning Location: Otaniemi campus, Innopoli 3 Business Area Equipment: Faro Focus 3D Methodology: Multiple
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
Boresight alignment method for mobile laser scanning systems
 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Quantitative structure tree models from terrestrial laser scanner data Pasi Raumonen! Tampere University of Technology!
 Quantitative structure tree models from terrestrial laser scanner data Pasi Raumonen! Tampere University of Technology!! Silvilaser 2015, 28-30 September 2015, La Grande Motte, France Tree modelling How
Quantitative structure tree models from terrestrial laser scanner data Pasi Raumonen! Tampere University of Technology!! Silvilaser 2015, 28-30 September 2015, La Grande Motte, France Tree modelling How
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
Multiray Photogrammetry and Dense Image. Photogrammetric Week Matching. Dense Image Matching - Application of SGM
 Norbert Haala Institut für Photogrammetrie Multiray Photogrammetry and Dense Image Photogrammetric Week 2011 Matching Dense Image Matching - Application of SGM p q d Base image Match image Parallax image
Norbert Haala Institut für Photogrammetrie Multiray Photogrammetry and Dense Image Photogrammetric Week 2011 Matching Dense Image Matching - Application of SGM p q d Base image Match image Parallax image
AUTOMATIC DETERMINATION OF FOREST INVENTORY PARAMETERS USING TERRESTRIAL LASER SCANNING
 AUTOMATIC DETERMINATION OF FOREST INVENTORY PARAMETERS USING TERRESTRIAL LASER SCANNING Merlijn Simonse 1, Tobias Aschoff, Heinrich Spiecker 3 and Michael Thies 4 Albert Ludwigs University, Institute for
AUTOMATIC DETERMINATION OF FOREST INVENTORY PARAMETERS USING TERRESTRIAL LASER SCANNING Merlijn Simonse 1, Tobias Aschoff, Heinrich Spiecker 3 and Michael Thies 4 Albert Ludwigs University, Institute for
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS
 CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
UAS based laser scanning for forest inventory and precision farming
 UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
TERRESTRIAL LASER SCANNER DATA PROCESSING
 TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN
 NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN OVERVIEW National point clouds Airborne laser scanning in the Netherlands Quality control Developments in lidar
NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN OVERVIEW National point clouds Airborne laser scanning in the Netherlands Quality control Developments in lidar
Leica Cyclone 5.4 Technical Specifications
 Leica Cyclone 5.4 Technical Specifications HDS Scanner control and operation Scan Scan Scan Register Model Survey Viewer Acquire and display image Acquire image at specified resolution (high, medium, low)
Leica Cyclone 5.4 Technical Specifications HDS Scanner control and operation Scan Scan Scan Register Model Survey Viewer Acquire and display image Acquire image at specified resolution (high, medium, low)
High Definition Modeling of Calw, Badstrasse and its Google Earth Integration
 Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
IDENTIFYING STRUCTURAL CHARACTERISTICS OF TREE SPECIES FROM LIDAR DATA
 IDENTIFYING STRUCTURAL CHARACTERISTICS OF TREE SPECIES FROM LIDAR DATA Tomáš Dolanský University of J.E.Purkyne, Faculty of the Environment, Department of Informatics and Geoinformatics e-mail: tomas.dolansky@ujep.cz
IDENTIFYING STRUCTURAL CHARACTERISTICS OF TREE SPECIES FROM LIDAR DATA Tomáš Dolanský University of J.E.Purkyne, Faculty of the Environment, Department of Informatics and Geoinformatics e-mail: tomas.dolansky@ujep.cz
DESCRIBING FOREST STANDS USING TERRESTRIAL LASER-SCANNING
 DESCRIBING FOREST STANDS USING TERRESTRIAL LASER-SCANNING T. Aschoff a, *, M. Thies a, H. Spiecker a a Institute for Forest Growth, University of Freiburg, Tennenbacherstr. 4, D-79106 Freiburg, Germany
DESCRIBING FOREST STANDS USING TERRESTRIAL LASER-SCANNING T. Aschoff a, *, M. Thies a, H. Spiecker a a Institute for Forest Growth, University of Freiburg, Tennenbacherstr. 4, D-79106 Freiburg, Germany
Derivation of Structural Forest Parameters from the Fusion of Airborne Hyperspectral and Laserscanning Data
 Derivation of Structural Forest Parameters from the Fusion of Airborne Hyperspectral and Laserscanning Data - Implications for Seamless Modeling of Terrestrial Ecosystems 24 26 September 2014, St.Oswald,
Derivation of Structural Forest Parameters from the Fusion of Airborne Hyperspectral and Laserscanning Data - Implications for Seamless Modeling of Terrestrial Ecosystems 24 26 September 2014, St.Oswald,
Precise laser-based optical 3D measurement of welding seams under water
 Precise laser-based optical 3D measurement of welding seams under water ISPRS/CIPA Workshop Underwater 3D Recording & Modeling" Piano di Sorrento (Napoli), Italy 16. 17. April 2015 Tanja Ekkel (M.Sc.)
Precise laser-based optical 3D measurement of welding seams under water ISPRS/CIPA Workshop Underwater 3D Recording & Modeling" Piano di Sorrento (Napoli), Italy 16. 17. April 2015 Tanja Ekkel (M.Sc.)
Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam
 Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam NEGRILĂ Aurel Department of Topography and Cadastre Technical University of Civil Engineering Bucharest Lacul Tei Bvd
Using terrestrial laser scan to monitor the upstream face of a rockfill weight dam NEGRILĂ Aurel Department of Topography and Cadastre Technical University of Civil Engineering Bucharest Lacul Tei Bvd
USE OF A POINT CLOUD CO-REGISTRATION ALGORITHM FOR DEFORMATION MEASURING
 USE OF A POINT CLOUD CO-REGISTRATION ALGORITHM FOR DEFORMATION MEASURING O.Monserrat, M. Crosetto, B.Pucci Institute of Geomatics, Castelldefels, Barceloba,Spain Abstract: During last few years the use
USE OF A POINT CLOUD CO-REGISTRATION ALGORITHM FOR DEFORMATION MEASURING O.Monserrat, M. Crosetto, B.Pucci Institute of Geomatics, Castelldefels, Barceloba,Spain Abstract: During last few years the use
Single Tree Stem Profile Detection Using Terrestrial Laser Scanner Data, Flatness Saliency Features and Curvature Properties
 Article Single Tree Stem Profile Detection Using Terrestrial Laser Scanner Data, Flatness Saliency Features and Curvature Properties Kenneth Olofsson * and Johan Holmgren Department of Forest Resource
Article Single Tree Stem Profile Detection Using Terrestrial Laser Scanner Data, Flatness Saliency Features and Curvature Properties Kenneth Olofsson * and Johan Holmgren Department of Forest Resource
TLS DEFORMATION MEASUREMENT USING LS3D SURFACE AND CURVE MATCHING
 TLS DEFORMATION MEASUREMENT USING LS3D SURFACE AND CURVE MATCHING O. Monserrat, M. Crosetto, B. Pucci Institute of Geomatics, Castelldefels, Barcelona, Spain, (oriol.monserrat, michele.crosetto, barbara.pucci)@ideg.es
TLS DEFORMATION MEASUREMENT USING LS3D SURFACE AND CURVE MATCHING O. Monserrat, M. Crosetto, B. Pucci Institute of Geomatics, Castelldefels, Barcelona, Spain, (oriol.monserrat, michele.crosetto, barbara.pucci)@ideg.es
Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems
 Thomas Kersten, Klaus Mechelke, Maren Lindstaedt, Harald Sternberg Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems Outline of presentation Introduction Laser scanning
Thomas Kersten, Klaus Mechelke, Maren Lindstaedt, Harald Sternberg Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems Outline of presentation Introduction Laser scanning
THREE-DIMENSIONAL FOREST CANOPY STRUCTURE FROM TERRESTRIAL LASER SCANNING
 Workshop on 3D Remote Sensing in Forestry, 14 th -15 th Feb. 2006, Vienna Session 2b 50 THREE-DIMENSIONAL FOREST CANOPY STRUCTURE FROM TERRESTRIAL LASER SCANNING F. Mark Danson 1, David Hetherington 1,
Workshop on 3D Remote Sensing in Forestry, 14 th -15 th Feb. 2006, Vienna Session 2b 50 THREE-DIMENSIONAL FOREST CANOPY STRUCTURE FROM TERRESTRIAL LASER SCANNING F. Mark Danson 1, David Hetherington 1,
An Accuracy Assessment of Derived Digital Elevation Models from Terrestrial Laser Scanning in a Sub-Tropical Forested Environment
 Article An Accuracy Assessment of Derived Digital Elevation Models from Terrestrial Laser Scanning in a Sub-Tropical Forested Environment Jasmine Muir 1,2,3, * ID, Nicholas Goodwin 1,2, John Armston 1,2,4
Article An Accuracy Assessment of Derived Digital Elevation Models from Terrestrial Laser Scanning in a Sub-Tropical Forested Environment Jasmine Muir 1,2,3, * ID, Nicholas Goodwin 1,2, John Armston 1,2,4
DETERMINATION OF CORRESPONDING TRUNKS IN A PAIR OF TERRESTRIAL IMAGES AND AIRBORNE LASER SCANNER DATA
 The Photogrammetric Journal of Finland, 20 (1), 2006 Received 31.7.2006, Accepted 13.11.2006 DETERMINATION OF CORRESPONDING TRUNKS IN A PAIR OF TERRESTRIAL IMAGES AND AIRBORNE LASER SCANNER DATA Olli Jokinen,
The Photogrammetric Journal of Finland, 20 (1), 2006 Received 31.7.2006, Accepted 13.11.2006 DETERMINATION OF CORRESPONDING TRUNKS IN A PAIR OF TERRESTRIAL IMAGES AND AIRBORNE LASER SCANNER DATA Olli Jokinen,
AUTOMATIC EXTRACTION OF BUILDING FEATURES FROM TERRESTRIAL LASER SCANNING
 AUTOMATIC EXTRACTION OF BUILDING FEATURES FROM TERRESTRIAL LASER SCANNING Shi Pu and George Vosselman International Institute for Geo-information Science and Earth Observation (ITC) spu@itc.nl, vosselman@itc.nl
AUTOMATIC EXTRACTION OF BUILDING FEATURES FROM TERRESTRIAL LASER SCANNING Shi Pu and George Vosselman International Institute for Geo-information Science and Earth Observation (ITC) spu@itc.nl, vosselman@itc.nl
Evaluation of a semi-automated approach for the co-registration of forest inventory plots and airborne laser scanning data
 Evaluation of a semi-automated approach for the co-registration of forest inventory plots and airborne laser scanning data Jean-Matthieu MONNET1 1 Irstea, UR EMGR, F-38402 Saint-Martin-d Hères, France
Evaluation of a semi-automated approach for the co-registration of forest inventory plots and airborne laser scanning data Jean-Matthieu MONNET1 1 Irstea, UR EMGR, F-38402 Saint-Martin-d Hères, France
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
Cover Page. Abstract ID Paper Title. Automated extraction of linear features from vehicle-borne laser data
 Cover Page Abstract ID 8181 Paper Title Automated extraction of linear features from vehicle-borne laser data Contact Author Email Dinesh Manandhar (author1) dinesh@skl.iis.u-tokyo.ac.jp Phone +81-3-5452-6417
Cover Page Abstract ID 8181 Paper Title Automated extraction of linear features from vehicle-borne laser data Contact Author Email Dinesh Manandhar (author1) dinesh@skl.iis.u-tokyo.ac.jp Phone +81-3-5452-6417
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
B-Field Scanner Software
 B-Field Scanner Software Software of the KLIPPEL R&DSYSTEM ( Document Revision 1.2) FEATURES Fully automated measurement process User friendly dedicated templates Uses Klippel db-lab and Robotics software
B-Field Scanner Software Software of the KLIPPEL R&DSYSTEM ( Document Revision 1.2) FEATURES Fully automated measurement process User friendly dedicated templates Uses Klippel db-lab and Robotics software
Automatic registration of terrestrial laser scans for geological deformation monitoring
 Automatic registration of terrestrial laser scans for geological deformation monitoring Daniel Wujanz 1, Michael Avian 2, Daniel Krueger 1, Frank Neitzel 1 1 Chair of Geodesy and Adjustment Theory, Technische
Automatic registration of terrestrial laser scans for geological deformation monitoring Daniel Wujanz 1, Michael Avian 2, Daniel Krueger 1, Frank Neitzel 1 1 Chair of Geodesy and Adjustment Theory, Technische
THE USE OF AIRBORNE HYPERSPECTRAL REFLECTANCE DATA TO CHARACTERIZE FOREST SPECIES DISTRIBUTION PATTERNS
 THE USE OF AIRBORNE HYPERSPECTRAL REFLECTANCE DATA TO CHARACTERIZE FOREST SPECIES DISTRIBUTION PATTERNS Weihs, P., Huber K. Institute of Meteorology, Department of Water, Atmosphere and Environment, BOKU
THE USE OF AIRBORNE HYPERSPECTRAL REFLECTANCE DATA TO CHARACTERIZE FOREST SPECIES DISTRIBUTION PATTERNS Weihs, P., Huber K. Institute of Meteorology, Department of Water, Atmosphere and Environment, BOKU
A QUALITY ASSESSMENT OF AIRBORNE LASER SCANNER DATA
 A QUALITY ASSESSMENT OF AIRBORNE LASER SCANNER DATA E. Ahokas, H. Kaartinen, J. Hyyppä Finnish Geodetic Institute, Geodeetinrinne 2, 243 Masala, Finland Eero.Ahokas@fgi.fi KEYWORDS: LIDAR, accuracy, quality,
A QUALITY ASSESSMENT OF AIRBORNE LASER SCANNER DATA E. Ahokas, H. Kaartinen, J. Hyyppä Finnish Geodetic Institute, Geodeetinrinne 2, 243 Masala, Finland Eero.Ahokas@fgi.fi KEYWORDS: LIDAR, accuracy, quality,
Ability of Terrestrial Laser Scanner Trimble TX5 in Cracks Monitoring at Different Ambient Conditions
 World Applied Sciences Journal 34 (12): 1748-1753, 2016 ISSN 1818-4952 IDOSI Publications, 2016 DOI: 10.5829/idosi.wasj.2016.1748.1753 Ability of Terrestrial Laser Scanner Trimble TX5 in Cracks Monitoring
World Applied Sciences Journal 34 (12): 1748-1753, 2016 ISSN 1818-4952 IDOSI Publications, 2016 DOI: 10.5829/idosi.wasj.2016.1748.1753 Ability of Terrestrial Laser Scanner Trimble TX5 in Cracks Monitoring
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING
 CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
Overview of the Trimble TX5 Laser Scanner
 Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses
 Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland FIG Working
Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland FIG Working
Forest Structure Estimation in the Canadian Boreal forest
 Forest Structure Estimation in the Canadian Boreal forest Michael L. Benson Leland E.Pierce Kathleen M. Bergen Kamal Sarabandi Kailai Zhang Caitlin E. Ryan The University of Michigan, Radiation Lab & School
Forest Structure Estimation in the Canadian Boreal forest Michael L. Benson Leland E.Pierce Kathleen M. Bergen Kamal Sarabandi Kailai Zhang Caitlin E. Ryan The University of Michigan, Radiation Lab & School
Integrating the Generations, FIG Working Week 2008,Stockholm, Sweden June 2008
 H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Cadastre - Preliminary Results
 Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
EVALUATION OF WORLDVIEW-1 STEREO SCENES AND RELATED 3D PRODUCTS
 EVALUATION OF WORLDVIEW-1 STEREO SCENES AND RELATED 3D PRODUCTS Daniela POLI, Kirsten WOLFF, Armin GRUEN Swiss Federal Institute of Technology Institute of Geodesy and Photogrammetry Wolfgang-Pauli-Strasse
EVALUATION OF WORLDVIEW-1 STEREO SCENES AND RELATED 3D PRODUCTS Daniela POLI, Kirsten WOLFF, Armin GRUEN Swiss Federal Institute of Technology Institute of Geodesy and Photogrammetry Wolfgang-Pauli-Strasse
Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications
 Update / News in the context of Remote Sensing applications") Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
TAKING LIDAR SUBSEA. Adam Lowry, Nov 2016
 TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
Automated Processing of Terrestrial Mid-Range Laser Scanner Data for Restoration Documentation at Millimeter Scale
 Automated Processing of Terrestrial Mid-Range Laser Scanner Data for Restoration Documentation at Millimeter Scale Peter DORNINGER / Clemens NOTHEGGER Vienna University of Technology, Christian Doppler
Automated Processing of Terrestrial Mid-Range Laser Scanner Data for Restoration Documentation at Millimeter Scale Peter DORNINGER / Clemens NOTHEGGER Vienna University of Technology, Christian Doppler
INDOOR 3D MODEL RECONSTRUCTION TO SUPPORT DISASTER MANAGEMENT IN LARGE BUILDINGS Project Abbreviated Title: SIMs3D (Smart Indoor Models in 3D)
") INDOOR 3D MODEL RECONSTRUCTION TO SUPPORT DISASTER MANAGEMENT IN LARGE BUILDINGS Project Abbreviated Title: SIMs3D (Smart Indoor Models in 3D) PhD Research Proposal 2015-2016 Promoter: Prof. Dr. Ir. George
INDOOR 3D MODEL RECONSTRUCTION TO SUPPORT DISASTER MANAGEMENT IN LARGE BUILDINGS Project Abbreviated Title: SIMs3D (Smart Indoor Models in 3D) PhD Research Proposal 2015-2016 Promoter: Prof. Dr. Ir. George
3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES
 3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES Georgeta Pop (Manea), Alexander Bucksch, Ben Gorte Delft Technical University, Department of Earth Observation and Space Systems,
3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES Georgeta Pop (Manea), Alexander Bucksch, Ben Gorte Delft Technical University, Department of Earth Observation and Space Systems,
2. POINT CLOUD DATA PROCESSING
 Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
3D SPATIAL DATA ACQUISITION AND MODELING OF ANGHEL SALIGNY MONUMENT USING TERRESTRIAL LASER SCANNING
 JOURNAL OF APPLIED ENGINEERING SCIENCES VOL. 2(15), issue 2_2012 ISSN 2247-3769 ISSN-L 2247-3769 (Print) / e-issn:2284-7197 3D SPATIAL DATA ACQUISITION AND MODELING OF ANGHEL SALIGNY MONUMENT USING TERRESTRIAL
JOURNAL OF APPLIED ENGINEERING SCIENCES VOL. 2(15), issue 2_2012 ISSN 2247-3769 ISSN-L 2247-3769 (Print) / e-issn:2284-7197 3D SPATIAL DATA ACQUISITION AND MODELING OF ANGHEL SALIGNY MONUMENT USING TERRESTRIAL
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
A METHOD TO PREDICT ACCURACY OF LEAST SQUARES SURFACE MATCHING FOR AIRBORNE LASER SCANNING DATA SETS
 A METHOD TO PREDICT ACCURACY OF LEAST SQUARES SURFACE MATCHING FOR AIRBORNE LASER SCANNING DATA SETS Robert Pâquet School of Engineering, University of Newcastle Callaghan, NSW 238, Australia (rpaquet@mail.newcastle.edu.au)
A METHOD TO PREDICT ACCURACY OF LEAST SQUARES SURFACE MATCHING FOR AIRBORNE LASER SCANNING DATA SETS Robert Pâquet School of Engineering, University of Newcastle Callaghan, NSW 238, Australia (rpaquet@mail.newcastle.edu.au)
Example of Monitoring Requirement
 CEGE Department 3DIMPact of Civil, Environmental & Geomatic Engineering (CEGE) 3D Imaging, Metrology, Photogrammetry Applied Coordinate Technologies (3DIMPact) Optical non-contact railway track measurement
CEGE Department 3DIMPact of Civil, Environmental & Geomatic Engineering (CEGE) 3D Imaging, Metrology, Photogrammetry Applied Coordinate Technologies (3DIMPact) Optical non-contact railway track measurement
METHODS FOR THE AUTOMATIC GEOMETRIC REGISTRATION OF TERRESTRIAL LASER SCANNER POINT CLOUDS IN FOREST STANDS
 METHODS FOR THE AUTOMATIC GEOMETRIC REGISTRATION OF TERRESTRIAL LASER SCANNER POINT CLOUDS IN FOREST STANDS Anne Bienert, Hans-Gerd Maas Dresden University of Technology, Institute of Photogrammetry and
METHODS FOR THE AUTOMATIC GEOMETRIC REGISTRATION OF TERRESTRIAL LASER SCANNER POINT CLOUDS IN FOREST STANDS Anne Bienert, Hans-Gerd Maas Dresden University of Technology, Institute of Photogrammetry and
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds
 Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning
 Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning Daniel Wujanz 1, Frank Neitzel 1, H.P. Hebel 2, J. Linke 2, W. Busch 2 1 Chair of Geodesy and
Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning Daniel Wujanz 1, Frank Neitzel 1, H.P. Hebel 2, J. Linke 2, W. Busch 2 1 Chair of Geodesy and
REGISTRATION OF AIRBORNE LASER DATA TO SURFACES GENERATED BY PHOTOGRAMMETRIC MEANS. Y. Postolov, A. Krupnik, K. McIntosh
 REGISTRATION OF AIRBORNE LASER DATA TO SURFACES GENERATED BY PHOTOGRAMMETRIC MEANS Y. Postolov, A. Krupnik, K. McIntosh Department of Civil Engineering, Technion Israel Institute of Technology, Haifa,
REGISTRATION OF AIRBORNE LASER DATA TO SURFACES GENERATED BY PHOTOGRAMMETRIC MEANS Y. Postolov, A. Krupnik, K. McIntosh Department of Civil Engineering, Technion Israel Institute of Technology, Haifa,
Trimble RealWorks. What s new in version 9.0
 Trimble RealWorks What s new in version 9.0 Trimble RealWorks v9.0 What s new Over 40 new features and enhancements Navigation and visualization improvements SketchUp interoperability Additional 3 rd party
Trimble RealWorks What s new in version 9.0 Trimble RealWorks v9.0 What s new Over 40 new features and enhancements Navigation and visualization improvements SketchUp interoperability Additional 3 rd party
Module 7 Defining Coordinate Systems
 Module 7 Defining Coordinate Systems Introduction Objectives Outline of Topics Covered The use of coordinate systems is very important in managing 3D spatial data including point clouds. In this module
Module 7 Defining Coordinate Systems Introduction Objectives Outline of Topics Covered The use of coordinate systems is very important in managing 3D spatial data including point clouds. In this module
DOCUMENTATION AND VISUALIZATION OF ANCIENT BURIAL MOUNDS BY HELICOPTER LASER SURVEYING
 DOCUMENTATION AND VISUALIZATION OF ANCIENT BURIAL MOUNDS BY HELICOPTER LASER SURVEYING Tsutomu Kakiuchi a *, Hirofumi Chikatsu b, Haruo Sato c a Aero Asahi Corporation, Development Management Division,
DOCUMENTATION AND VISUALIZATION OF ANCIENT BURIAL MOUNDS BY HELICOPTER LASER SURVEYING Tsutomu Kakiuchi a *, Hirofumi Chikatsu b, Haruo Sato c a Aero Asahi Corporation, Development Management Division,
Highly Accurate Photorealistic Modeling of Cultural Heritage Assets
 Highly Accurate Photorealistic Modeling of Cultural Heritage Assets Peter DORNINGER 1 / Marco BRUNNER 2 1 TU Vienna, Institute of Photogrammetry and Remote Sensing / 2 a:xperience audiovisuelle Kommunikation
Highly Accurate Photorealistic Modeling of Cultural Heritage Assets Peter DORNINGER 1 / Marco BRUNNER 2 1 TU Vienna, Institute of Photogrammetry and Remote Sensing / 2 a:xperience audiovisuelle Kommunikation
AUTOMATIC PROCESSING OF MOBILE LASER SCANNER POINT CLOUDS FOR BUILDING FAÇADE DETECTION
 AUTOMATIC PROCESSING OF MOBILE LASER SCANNER POINT CLOUDS FOR BUILDING FAÇADE DETECTION Nalani Hetti Arachchige*, Sanka Nirodha Perera, Hans-Gerd Maas Institute of Photogrammetry and Remote Sensing, Technische
AUTOMATIC PROCESSING OF MOBILE LASER SCANNER POINT CLOUDS FOR BUILDING FAÇADE DETECTION Nalani Hetti Arachchige*, Sanka Nirodha Perera, Hans-Gerd Maas Institute of Photogrammetry and Remote Sensing, Technische
Forest canopy gap fraction from terrestrial laser scanning
 Forest canopy gap fraction from terrestrial laser scanning Danson, FM, Hetherington, D, Morsdorf, F and et, al http://dx.doi.org/10.1109/lgrs.2006.887064 Title Authors Type URL Forest canopy gap fraction
Forest canopy gap fraction from terrestrial laser scanning Danson, FM, Hetherington, D, Morsdorf, F and et, al http://dx.doi.org/10.1109/lgrs.2006.887064 Title Authors Type URL Forest canopy gap fraction
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
EFFECTS OF DIFFERENT LASER SCANNING MODES ON THE RESULTS OF BUILDING RECOGNITION AND RECONSTRUCTION
 EFFECTS OF DIFFERENT LASER SCANNING MODES ON THE RESULTS OF BUILDING RECOGNITION AND RECONSTRUCTION Eberhard STEINLE, Thomas VÖGTLE University of Karlsruhe, Germany Institute of Photogrammetry and Remote
EFFECTS OF DIFFERENT LASER SCANNING MODES ON THE RESULTS OF BUILDING RECOGNITION AND RECONSTRUCTION Eberhard STEINLE, Thomas VÖGTLE University of Karlsruhe, Germany Institute of Photogrammetry and Remote
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Integration of airborne LiDAR and hyperspectral remote sensing data to support the Vegetation Resources Inventory and sustainable forest management
 Integration of airborne LiDAR and hyperspectral remote sensing data to support the Vegetation Resources Inventory and sustainable forest management Executive Summary This project has addressed a number
Integration of airborne LiDAR and hyperspectral remote sensing data to support the Vegetation Resources Inventory and sustainable forest management Executive Summary This project has addressed a number
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation
 Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
Automatic Building Extrusion from a TIN model Using LiDAR and Ordnance Survey Landline Data
 Automatic Building Extrusion from a TIN model Using LiDAR and Ordnance Survey Landline Data Rebecca O.C. Tse, Maciej Dakowicz, Christopher Gold and Dave Kidner University of Glamorgan, Treforest, Mid Glamorgan,
Automatic Building Extrusion from a TIN model Using LiDAR and Ordnance Survey Landline Data Rebecca O.C. Tse, Maciej Dakowicz, Christopher Gold and Dave Kidner University of Glamorgan, Treforest, Mid Glamorgan,
POINT CLOUDS AND DERIVATIVES FOR NATIONWIDE GEOSPATIAL INFORMATION GEORGE VOSSELMAN
 POINT CLOUDS AND DERIVATIVES FOR NATIONWIDE GEOSPATIAL INFORMATION GEORGE VOSSELMAN OVERVIEW Point cloud generation and quality control New lidar technologies Dense matching Updating nationwide point clouds
POINT CLOUDS AND DERIVATIVES FOR NATIONWIDE GEOSPATIAL INFORMATION GEORGE VOSSELMAN OVERVIEW Point cloud generation and quality control New lidar technologies Dense matching Updating nationwide point clouds
IGTF 2016 Fort Worth, TX, April 11-15, 2016 Submission 149
 IGTF 26 Fort Worth, TX, April -5, 26 2 3 4 5 6 7 8 9 2 3 4 5 6 7 8 9 2 2 Light weighted and Portable LiDAR, VLP-6 Registration Yushin Ahn (yahn@mtu.edu), Kyung In Huh (khuh@cpp.edu), Sudhagar Nagarajan
IGTF 26 Fort Worth, TX, April -5, 26 2 3 4 5 6 7 8 9 2 3 4 5 6 7 8 9 2 2 Light weighted and Portable LiDAR, VLP-6 Registration Yushin Ahn (yahn@mtu.edu), Kyung In Huh (khuh@cpp.edu), Sudhagar Nagarajan
coding of various parts showing different features, the possibility of rotation or of hiding covering parts of the object's surface to gain an insight
 Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Mapping Project Report Table of Contents
 LiDAR Estimation of Forest Leaf Structure, Terrain, and Hydrophysiology Airborne Mapping Project Report Principal Investigator: Katherine Windfeldt University of Minnesota-Twin cities 115 Green Hall 1530
LiDAR Estimation of Forest Leaf Structure, Terrain, and Hydrophysiology Airborne Mapping Project Report Principal Investigator: Katherine Windfeldt University of Minnesota-Twin cities 115 Green Hall 1530
VISUALIZATION OF GEOINFORMATION IN DAM DEFORMATION MONITORING
 VISUALIZATION OF GEOINFORMATION IN DAM DEFORMATION MONITORING Gergana Antova Abstract This paper introduces laser scanning as an instrument which may be applicable to the field of dam deformation monitoring.
VISUALIZATION OF GEOINFORMATION IN DAM DEFORMATION MONITORING Gergana Antova Abstract This paper introduces laser scanning as an instrument which may be applicable to the field of dam deformation monitoring.
ANALYSIS OF FULL-WAVEFORM ALS DATA BY SIMULTANEOUSLY ACQUIRED TLS DATA: TOWARDS AN ADVANCED DTM GENERATION IN WOODED AREAS
 ANALYSIS OF FULL-WAVEFORM ALS DATA BY SIMULTANEOUSLY ACQUIRED TLS DATA: TOWARDS AN ADVANCED DTM GENERATION IN WOODED AREAS M. Doneus a,b *, C. Briese a,c, N. Studnicka d a Ludwig Boltzmann Institute for
ANALYSIS OF FULL-WAVEFORM ALS DATA BY SIMULTANEOUSLY ACQUIRED TLS DATA: TOWARDS AN ADVANCED DTM GENERATION IN WOODED AREAS M. Doneus a,b *, C. Briese a,c, N. Studnicka d a Ludwig Boltzmann Institute for
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
ifp Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report
 Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report Institute for Photogrammetry (ifp) University of Stuttgart ifp Geschwister-Scholl-Str. 24 D M. Cramer: Final report
Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report Institute for Photogrammetry (ifp) University of Stuttgart ifp Geschwister-Scholl-Str. 24 D M. Cramer: Final report
A GIS-BASED ALGORITHM TO GENERATE A LIDAR PIT-FREE CANOPY HEIGHT MODEL
 DOI 10.1515/pesd-2017-0027 PESD, VOL. 11, no. 2, 2017 A GIS-BASED ALGORITHM TO GENERATE A LIDAR PIT-FREE CANOPY HEIGHT MODEL Casiana Marcu 1, Florian Stătescu 2, Nicoleta Iurist 3 Key words: GIS, LIDAR,
DOI 10.1515/pesd-2017-0027 PESD, VOL. 11, no. 2, 2017 A GIS-BASED ALGORITHM TO GENERATE A LIDAR PIT-FREE CANOPY HEIGHT MODEL Casiana Marcu 1, Florian Stătescu 2, Nicoleta Iurist 3 Key words: GIS, LIDAR,
GENERATING BUILDING OUTLINES FROM TERRESTRIAL LASER SCANNING
 GENERATING BUILDING OUTLINES FROM TERRESTRIAL LASER SCANNING Shi Pu International Institute for Geo-information Science and Earth Observation (ITC), Hengelosestraat 99, P.O. Box 6, 7500 AA Enschede, The
GENERATING BUILDING OUTLINES FROM TERRESTRIAL LASER SCANNING Shi Pu International Institute for Geo-information Science and Earth Observation (ITC), Hengelosestraat 99, P.O. Box 6, 7500 AA Enschede, The