A Novel Hand Posture Recognition System Based on Sparse Representation Using Color and Depth Images
|
|
|
- Francine Daniels
- 5 years ago
- Views:
Transcription
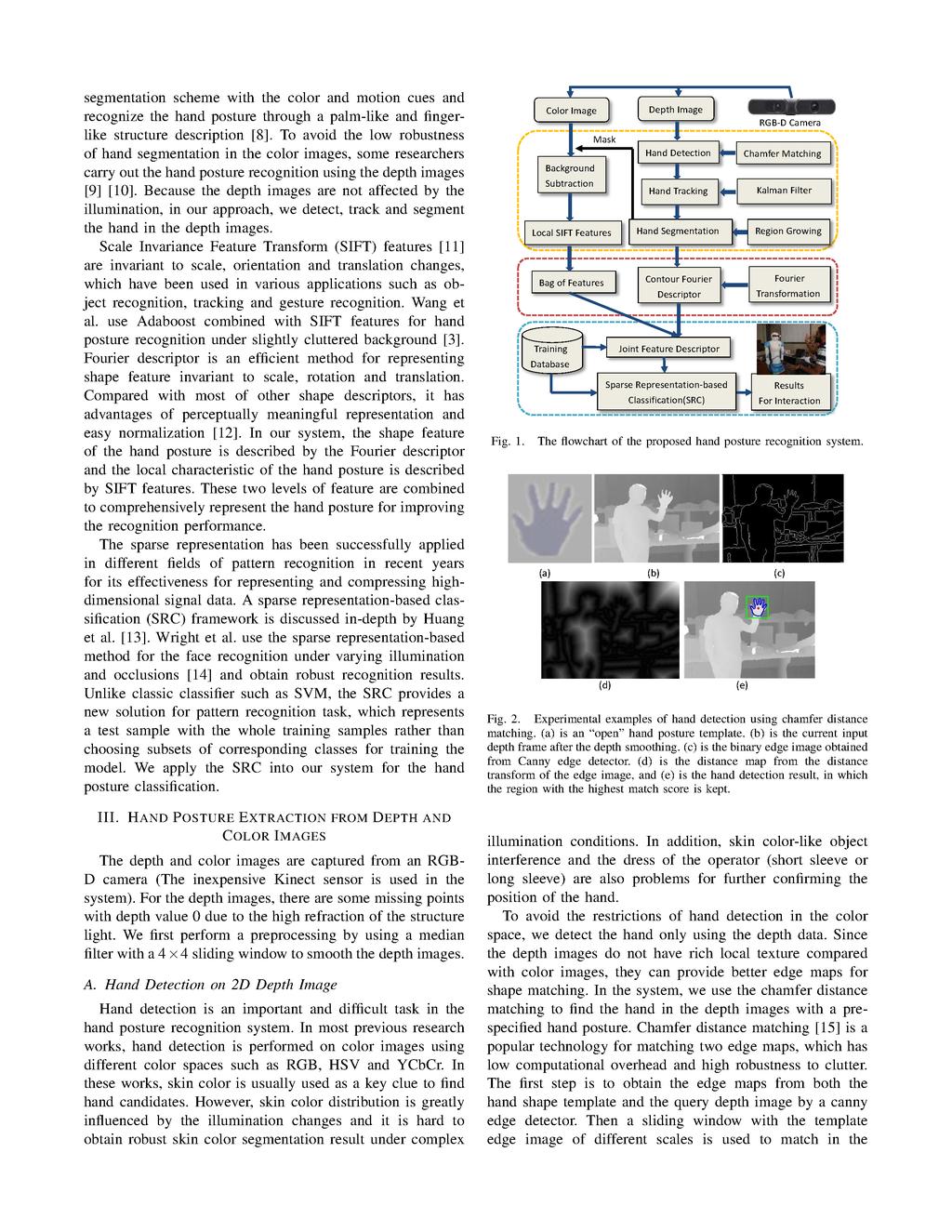
1 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, Tokyo, Japan A Novel Hand Posture Recognition System Based on Sparse Representation Using Color and Depth Images Dan Xu, Yen-Lun Chen, Xinyu Wu, Wei Feng, Huihuan Qian and Yangsheng Xu Abstract Hand posture is a natural and effective human robot interaction way. In this paper, an user-independent hand posture recognition system using depth and color images captured from an RGB-D camera is presented. To recognize hand posture against complicated background conditions, we propose a novel method for automatic and accurate hand posture segmentation which detects the hand with Chamfer matching, tracks the hand with Kalman filter and segments the hand with region growing algorithm only in the depth space. A new hand posture descriptor invariant to scale, shift and in-plane rotation is constructed with the combination of local contour Fourier descriptor and global Bag-of-Features (BoF) descriptor based on Scale Invariance Feature Transform (SIFT). The sparse representation-based classification (SRC) is applied to perform the hand posture recognition task in the system. Experiments with a self-built large scale hand posture database collected online show the robustness and effectiveness of the proposed system. I. INTRODUCTION Human robot interaction (HRI) is an attractive topic in the computer vision and robotics research community. As an effective and natural human-robot interaction interface, vision-based hand posture recognition has been studied by many researchers for years. However, due to the complicated background in practical interaction applications, illumination conditions and the highly deformable structure of the hand, hand posture recognition remains to be a challenging problem. In general, vision-based hand posture recognition systems can be categorized into 3D model-based and appearancebased approaches [1]. The 3D model-based approaches can provide a wide class of hand postures through building a rich description hand model, which however, is a complicated procedure requiring a huge hand-image database containing all the characteristic hand shapes under various views. Besides, in the feature extraction of 3D model-based approaches, handling the singularities from ambiguous views is still a difficult problem. In this paper, we focus on the appearance-based hand posture recognition, which generally includes hand detection The work described in this paper is partially supported by the National Natural Science Foundation of China ( ), Shenzhen Fundamental Research Program (JC A), and Guangdong Innovative Research Team Program (201001D ). D. Xu, Y.-L. Chen, X. Wu, W. Feng are with Guangdong Provincial Key Laboratory of Robotics and Intelligent System, Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, China {dan.xu, yl.chen, wei.feng}@siat.ac.cn. X. Wu is the corresponding author {xy.wu@siat.ac.cn}. X. Wu, H. Qian and Y. Xu are also with the Department of Mechanical and Automation Engineering, The Chinese University of Hong Kong, Hong Kong SAR, China {hhqian, ysxu}@mae.cuhk.edu.hk. and segmentation, feature representation of the hand posture, and classification. Many previous research papers implement hand detection and segmentation in color images using skin color information. Skin color-based methods have low computational complexity, but skin-color detection is greatly influenced by the background and illumination [2], which thus can not output robust enough segmentation results for the demands of hand posture recognition in the dynamic environment. Efficient feature representation of the hand posture is crucial for the recognition performance of the system. Local invariant descriptor such as SIFT feature, shape descriptors such as region moments and Zernike moments are popular descriptors used in several hand posture recognition systems [3] [4], but in these systems only a single feature is used without considering the fusion of different levels of features to comprehensively represent the hand posture. In current research work, various classification models such as support vector machine (SVM) [5], Hidden Markov Model (HMM), Hidden Conditional Random Fields (HCRF) [6] are extensively employed in the hand posture recognition. These models all have the need of model selection and parameter training which is critical for classification performance. In this paper, we present a robust hand posture recognition framework for human robot interaction as illustrated in Fig. 1. Color and depth images taken from an RGB-D camera are used as the input of the system. To avoid the influence of complicated background and illumination conditions, we propose a novel method for hand detection, tracking and segmentation using the depth image only. The extracted hand silhouette in the depth image is mapped as an image mask for background subtraction in the corresponding color image. A local contour Fourier descriptor extracted from the depth posture image and a global Bag-of-Features descriptor with SIFT extracted from the color posture image are fused to represent the hand posture invariant to scale, translation and in-plane rotation. The sparse representation with l 1 -norm minimization is applied into the system and obtain promising recognition results. II. RELATED WORK There have been several research papers published on the appearance-based hand posture recognition in the literature. Triesch et al. propose a person-independent system using Elastic Graph Matching to recognize hand postures against complex background [7]. The system locates the hand posture region simply relying on skin-color detection and only a small scale dataset used for training the classifier resulting an accuracy rate of 85.8%. Fang et al. use an adaptive hand /13/$ IEEE 3765
2 3766
 represent the point set of the template edge image and the sub-window edge image respectively, the chamfer distance between U T and V Q can be computed as follows: d cham (U T,V Q )= 1 n u i U")
, which converts the query binary edge image into gray image by assigning each edge pixel")
3 query depth edge image. The similarity between these two edge images is measured by the chamfer distance. If we let U T (u i U T,i=1,2,...,n) and V Q (v j V Q, j= 1,2,...,m) represent the point set of the template edge image and the sub-window edge image respectively, the chamfer distance between U T and V Q can be computed as follows: d cham (U T,V Q )= 1 n u i U T min u i v j. (1) v j V Q The value of d cham actually is the mean of distances between each point u i U T and its nearest edge point in V Q. To reduce the matching cost, the chamfer distance can be computed effectively by the distance transform (DT), which converts the query binary edge image into gray image by assigning each edge pixel with zero and each non-edge pixel with the distance value to its nearest edge point. Through the sliding window match, we keep several hand candidates according to the chamfer distance score d cham. Since the hand is in front of the background when the gesture interaction starts, we can define the final match score S hand for every hand candidate as follows: S hand =(1 v can v max ) d cham. (2) Here, v max represents the maximum depth distance of the depth sensor and v can represents the depth distance of the hand candidate. The value of S hand is used to confirm the best hand match position in the system. Examples of the hand detection based on chamfer matching are shown in Fig. 2. B. Hand Tracking and Segmentation in 3D Depth Space To recognize dynamic hand posture, the system needs to track the hand based on the initial hand detection result. Unlike in the color space, hand tracking in the depth space can not use color features, but we have the movement information of the hand in the 3D space. Due to the similarity of the hand velocity between adjacent frames, so we can estimate the hand position in the current frame based on the hand movement of the previous frame: P current = P previous +V control t. (3) where P current and P previous represent the point cloud coordinates of the hand central points in adjacent frames; V control ={v x,v y,v z } is a control vector with the hand velocity values in x, y and z axis; t is the interval time between the current frame and previous frame. In our system, the Kalman filter technique [16] is used to track the hand in the depth space. Hand segmentation is a necessary step for the hand posture recognition. The hand centroid point position from the hand segmentation can be used to correct the predicted position in the hand tracking. Since the depth value of the hand surface in the point cloud is continuous, we can use a classic region growing approach [17] to segment the hand region. We select the hand central point obtained from hand tracking as a seed point and define an initial hand region A which is a 8- connectivity region of the seed point. If we let d(x) represent Fig. 3. Experimental examples of hand posture detection. The hand region extracted in the depth image can be mapped as an image mask to segment the hand in the corresponding color image. the depth value of a point x and let N represent the set of neighbors around A, then we can allocate a point x in N into A through a difference measure δ: δ(x)= d(x) 1 n n y i A,i=1 [d(y i )], (4) where n is the number of points in the region A. After traversing all boundary points in N, A and N are both updated. If we repeat this operation until there is no neighboring point whose difference value is less than a specified threshold, the process is terminated and A is the final hand region. To avoid part of the wrist is also segmented, we use edge and area of the hand as prior knowledge to improve the accuracy of hand segmentation. Fig. 3 shows examples of hand segmentation results in both depth and color images. IV. FEATURE REPRESENTATION Once a hand posture is segmented from both the depth and color images, a new feature descriptor which combines local and global feature is proposed for improving the hand posture recognition performance. The joint feature descriptor is constructed by using a local contour feature representation based on Fourier transform and a global bag-of-features (BoF) representation based on scale invariant feature transform (SIFT). For the hand posture classification, 2D contour is important and discriminative information, which can be deemed as a local shape feature of the hand. Benefit from the effective hand posture segmentation in the depth image of the system, we can extract the contour feature by using an invariant Fourier descriptor. If we let k(n) = {x n,y n },(n = 1,...,N) denote a series of discrete ordered points of a segmented hand posture contour, a Fourier descriptor F ={F k } of the contour can be calculated from the 1-D discrete Fourier transform applied on the sequence k(n): F k = 1 N N 1 2π jnk k(n)e N k=0,1,...,n 1, (5) n=0 Based on three important properties of the Fourier descriptor: the information of shape is described through the spectral magnitude; the information of rotation and the start point is described through the phase; the information of translation 3767

4 3768
5 (a) Hand posture classes: six, fist, one, three (b) Hand posture classes: eight, thumb, ok, two Fig. 7. Examples of hand posture segmentation results using hand posture extraction module of the system. The first column is the binary silhouettes of hand postures obtained from depth stream. The other columns are hand posture samples segmented from color stream. Ok Thumb Three Six Fist Eight Two One Eight Fist Six Three Thumb Ok One Two Ok Thumb Three Two One Eight Fist Six Three Thumb Ok Six Fist Eight One Two Ok Thumb Three Six Fist Eight One Two Ok Thumb Three Six Fist Eight One Two (a) SRC with joint feature descriptor(average accuracy = 93.8%) (b) SRC with global BoF-SIFT feature (Average accuracy = 90.1%) (c) SRC with local contour Fourier feature (Average accuracy = 83%) Fig. 8. The confusion matrixes of recognition using SRC with single and joint feature descriptors (60-dimension). with the robot platform. The database currently contains 8 different types of hand postures which are collected under complex scene conditions such as cluttered background and varying illumination as shown in Fig. 6. To guarantee the user independence of recognition, each type of hand posture is performed by 10 different people and a pair of 2-minute video clips from calibrated depth and color stream are captured by each people for it. Each frame of the video is a hand posture sample. Besides, we also make the posture samples with scale, viewpoint and in-plane rotation (0-90 ) changes for evaluating the robustness of recognition. The hand posture extraction module allows the system to segment hand posture online in the depth and color spaces for further feature extraction. Fig. 7 shows examples of hand posture segmentation results from the original depth and color video in the database. The hand posture database is equally divided into two parts: one part is used for the dictionary construction of sparse representation; the other part is used for the test. Each part contains all types of hand postures. The joint feature vector is extracted from a pair of depth and color hand posture sample with the procedure described in Section IV. Before the test experiments, the length of joint feature vector (i.e. m) and the ratio of the dimension of global BOF-SIFT feature in joint feature vector (i.e. q/m) is preliminarily set to 60 and 0.6, respectively. To improve the computational performance, we also optimize the training hand posture database with a dictionary learning algorithm K-SVD [19] to remove highly similar samples in the training database, then replace the large and dense dictionary with a small and sparse one. Fig. 8 shows the test results of using sparse representation with single and joint feature descriptors respectively. It can be noted that using joint feature representation the system yields an average accuracy of 93.8%, which outperforms that of using single global BOF-SIFT feature (90.1%) or local contour Fourier feature (83%). To evaluate how the performance is affected by the length of the joint feature vector and the ratio of the dimension of global BoF-SIFT feature in joint feature, we carry out a series of experiments with the test samples. Fig. 9 shows the results of average accuracy of recognition with varying lengths (from 20 to 120) and ratios (from 0.1 to 1). We can note that when the length of joint feature is less than 60 the performance can obtain significant improvement with the increase of the feature length, while the performance only presents slight difference when the length is larger than 60. This is because for BoF-SIFT if the codebook can represent the hand posture samples compactly, increasing the size of the codebook further pays little effect on the final classification performance. For the contour Fourier feature, increasing the dimension can only bring more details of the contour but not the most useful shape information for classification. Larger dimension of the joint feature will also generate bigger computational overhead. Under all different lengths of the joint feature, the accuracy of recognition is the best when the ratio is between 0.6 and 0.7. This implies that the global BoF-SIFT component is more important than local contour Fourier component for the classification, and it can help to improve the discrimination for the hand postures with similar shape which is a major limitation for the contour 3769
6 Average accuracy (%) dimensional feature descriptor 80 dimensional feature descriptor 60 dimensional feature descriptor 40 dimensional feature descriptor 20 dimensional feature descriptor The ratio of the dimension of global BoF SIFT feature in joint feature descriptor Fig. 9. The performance of recognition with varying lengths of the joint feature descriptor and varying ratios of the dimension of global BoF-SIFT in the joint feature. TABLE I PERFORMANCE COMPARISON ON THE SELF-BUILT HAND POSTURE DATABASE. Method Average Accuracy (1)Nearest Neighbor + Joint Feature 83% (2)Nearest Subspace + Joint Feature 87% (3)Linear SVM + BoF-SIFT 89% (4)Linear SVM + Joint Feature 91% (5)HCRF + Distance + SIFT [6] 90% (6)Adaboost + SIFT [3] 88% Our Method (SRC + Joint Feature) 93.8% Fourier feature. Based on the self-built hand posture database, we conduct comparison experiments with other popular methods and classifiers. Table I shows the results of the performance comparison. In the experiments, methods (1) (2) (3) (4) replace the sparse representation-based classification (SRC) approach with Nearest Neighbor, Nearest Subspace and Linear SVM and utilize the proposed feature representation and hand posture extraction modules. It is clear that the SRC produce better recognition accuracy than these supervised classifiers who need the model selection which is critical for the classification performance. Methods (5) (6) use HCRF and Adaboost with SIFT using only color hand posture samples and the features are extracted with the background. The joint feature representation with color and depth information and effective hand posture extraction scheme make our method obtain a better performance. For the computational speed aspect, the computation of a pair of color and depth frames requires 160 ms in average, namely about 6 frames per second running on our robot platform. This is a near realtime processing for hand posture interaction applications. VII. CONCLUSIONS In this paper, a novel user-independent hand posture recognition system using the sparse representation method with the combination of different-level features of the hand posture is proposed. A reliable hand posture extraction approach in the color and depth images from an RGB-D camera allows the system to work against complicated background and varying illumination conditions. The experiments on a self-built database containing 8 types of hand postures collected by 10 different individuals show that the system can recognize hand postures with scale, viewpoint and in-plane rotation (0-90 ) changes and an average recognition rate of 93.8% is presented. The experimental results also demonstrate that the fusion of local contour Fourier descriptor and global BoF- SIFT descriptor can significantly improve the recognition performance. In future, we plan to add more posture types into the database and develop interesting interaction applications on the robot platform based on the proposed system. REFERENCES [1] H. Zhou and T. Huang, Tracking articulated hand motion with eigen dynamics analysis, in IEEE International Conference on Computer Vision (ICCV). IEEE, 2003, pp [2] V. Vezhnevets, V. Sazonov, and A. Andreeva, A survey on pixel-based skin color detection techniques, in Proc. Graphicon, vol. 3. Moscow, Russia, [3] C. Wang and K. Wang, Hand posture recognition using adaboost with sift for human robot interaction, Recent Progress in Robotics: Viable Robotic Service to Human, pp , [4] L. Gu and J. Su, Natural hand posture recognition based on zernike moments and hierarchical classifier, in IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2008, pp [5] N. Dardas, Q. Chen, N. Georganas, and E. Petriu, Hand gesture recognition using bag-of-features and multi-class support vector machine, in IEEE International Symposium on Haptic Audio-Visual Environments and Games (HAVE). IEEE, 2010, pp [6] T. Liu, K. Wang, A. Tsai, and C. Wang, Hand posture recognition using hidden conditional random fields, in IEEE/ASME International Conference on Advanced Intelligent Mechatronics. IEEE, 2009, pp [7] J. Triesch and C. Von Der Malsburg, A system for person-independent hand posture recognition against complex backgrounds, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 23, no. 12, pp , [8] Y. Fang, K. Wang, J. Cheng, and H. Lu, A real-time hand gesture recognition method, in IEEE International Conference on Multimedia and Expo. IEEE, 2007, pp [9] Z. Mo and U. Neumann, Real-time hand pose recognition using lowresolution depth images, in IEEE Computer Society Conference on Computer Vision and Pattern Recognition, vol. 2. Ieee, 2006, pp [10] K. Fujimura and X. Liu, Sign recognition using depth image streams, in International Conference on Automatic Face and Gesture Recognition. IEEE, 2006, pp [11] D. Lowe, Object recognition from local scale-invariant features, in IEEE International Conference on Computer Vision (CVPR), vol. 2. IEEE, 1999, pp [12] D. Zhang and G. Lu, A comparative study of fourier descriptors for shape representation and retrieval, in Proceedings of the Fifth Asian Conf. on Computer Vision. Citeseer, 2002, pp [13] K. Huang and S. Aviyente, Sparse representation for signal classification, Advances in neural information processing systems, vol. 19, p. 609, [14] J. Wright, A. Yang, A. Ganesh, S. Sastry, and Y. Ma, Robust face recognition via sparse representation, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 31, no. 2, pp , [15] M. Liu, O. Tuzel, A. Veeraraghavan, and R. Chellappa, Fast directional chamfer matching, in IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2010, pp [16] R. Kalman et al., A new approach to linear filtering and prediction problems, Journal of basic Engineering, vol. 82, no. 1, pp , [17] R. Adams and L. Bischof, Seeded region growing, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 16, no. 6, pp , [18] S. Chen, D. Donoho, and M. Saunders, Atomic decomposition by basis pursuit, SIAM review, pp , [19] M. Aharon, M. Elad, and A. Bruckstein, K-svd: An algorithm for designing overcomplete dictionaries for sparse representation, Signal Processing, IEEE Transactions on, vol. 54, no. 11, pp ,
Short Survey on Static Hand Gesture Recognition
 Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Keywords Binary Linked Object, Binary silhouette, Fingertip Detection, Hand Gesture Recognition, k-nn algorithm.
 Volume 7, Issue 5, May 2017 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Hand Gestures Recognition
Volume 7, Issue 5, May 2017 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Hand Gestures Recognition
Recognition of Human Body Movements Trajectory Based on the Three-dimensional Depth Data
 Preprints of the 19th World Congress The International Federation of Automatic Control Recognition of Human Body s Trajectory Based on the Three-dimensional Depth Data Zheng Chang Qing Shen Xiaojuan Ban
Preprints of the 19th World Congress The International Federation of Automatic Control Recognition of Human Body s Trajectory Based on the Three-dimensional Depth Data Zheng Chang Qing Shen Xiaojuan Ban
Hand Gesture Recognition Based On The Parallel Edge Finger Feature And Angular Projection
 Hand Gesture Recognition Based On The Parallel Edge Finger Feature And Angular Projection Zhou Yimin 1,2, Jiang Guolai 1, Xu Guoqing 1 and Lin Yaorong 3 1 Shenzhen Institutes of Advanced Technology, Chinese
Hand Gesture Recognition Based On The Parallel Edge Finger Feature And Angular Projection Zhou Yimin 1,2, Jiang Guolai 1, Xu Guoqing 1 and Lin Yaorong 3 1 Shenzhen Institutes of Advanced Technology, Chinese
An efficient face recognition algorithm based on multi-kernel regularization learning
 Acta Technica 61, No. 4A/2016, 75 84 c 2017 Institute of Thermomechanics CAS, v.v.i. An efficient face recognition algorithm based on multi-kernel regularization learning Bi Rongrong 1 Abstract. A novel
Acta Technica 61, No. 4A/2016, 75 84 c 2017 Institute of Thermomechanics CAS, v.v.i. An efficient face recognition algorithm based on multi-kernel regularization learning Bi Rongrong 1 Abstract. A novel
Non-rigid body Object Tracking using Fuzzy Neural System based on Multiple ROIs and Adaptive Motion Frame Method
 Proceedings of the 2009 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 2009 Non-rigid body Object Tracking using Fuzzy Neural System based on Multiple ROIs
Proceedings of the 2009 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 2009 Non-rigid body Object Tracking using Fuzzy Neural System based on Multiple ROIs
A Hand Gesture Recognition Method Based on Multi-Feature Fusion and Template Matching
 Available online at www.sciencedirect.com Procedia Engineering 9 (01) 1678 1684 01 International Workshop on Information and Electronics Engineering (IWIEE) A Hand Gesture Recognition Method Based on Multi-Feature
Available online at www.sciencedirect.com Procedia Engineering 9 (01) 1678 1684 01 International Workshop on Information and Electronics Engineering (IWIEE) A Hand Gesture Recognition Method Based on Multi-Feature
2 Proposed Methodology
 3rd International Conference on Multimedia Technology(ICMT 2013) Object Detection in Image with Complex Background Dong Li, Yali Li, Fei He, Shengjin Wang 1 State Key Laboratory of Intelligent Technology
3rd International Conference on Multimedia Technology(ICMT 2013) Object Detection in Image with Complex Background Dong Li, Yali Li, Fei He, Shengjin Wang 1 State Key Laboratory of Intelligent Technology
A New Framework for Real-time Hand Gesture Detection and Recognition
 2012 International Conference on Information and Network Technology (ICINT 2012) IPCSIT vol. 37 (2012) (2012) IACSIT Press, Singapore A New Framework for Real-time Hand Gesture Detection and Recognition
2012 International Conference on Information and Network Technology (ICINT 2012) IPCSIT vol. 37 (2012) (2012) IACSIT Press, Singapore A New Framework for Real-time Hand Gesture Detection and Recognition
Object Tracking using Superpixel Confidence Map in Centroid Shifting Method
 Indian Journal of Science and Technology, Vol 9(35), DOI: 10.17485/ijst/2016/v9i35/101783, September 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 Object Tracking using Superpixel Confidence
Indian Journal of Science and Technology, Vol 9(35), DOI: 10.17485/ijst/2016/v9i35/101783, September 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 Object Tracking using Superpixel Confidence
A Robust Hand Gesture Recognition Using Combined Moment Invariants in Hand Shape
 , pp.89-94 http://dx.doi.org/10.14257/astl.2016.122.17 A Robust Hand Gesture Recognition Using Combined Moment Invariants in Hand Shape Seungmin Leem 1, Hyeonseok Jeong 1, Yonghwan Lee 2, Sungyoung Kim
, pp.89-94 http://dx.doi.org/10.14257/astl.2016.122.17 A Robust Hand Gesture Recognition Using Combined Moment Invariants in Hand Shape Seungmin Leem 1, Hyeonseok Jeong 1, Yonghwan Lee 2, Sungyoung Kim
Hand gesture recognition with Leap Motion and Kinect devices
 Hand gesture recognition with Leap Motion and devices Giulio Marin, Fabio Dominio and Pietro Zanuttigh Department of Information Engineering University of Padova, Italy Abstract The recent introduction
Hand gesture recognition with Leap Motion and devices Giulio Marin, Fabio Dominio and Pietro Zanuttigh Department of Information Engineering University of Padova, Italy Abstract The recent introduction
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Sign Language Recognition using Dynamic Time Warping and Hand Shape Distance Based on Histogram of Oriented Gradient Features
 Sign Language Recognition using Dynamic Time Warping and Hand Shape Distance Based on Histogram of Oriented Gradient Features Pat Jangyodsuk Department of Computer Science and Engineering The University
Sign Language Recognition using Dynamic Time Warping and Hand Shape Distance Based on Histogram of Oriented Gradient Features Pat Jangyodsuk Department of Computer Science and Engineering The University
Face Recognition Using Long Haar-like Filters
 Face Recognition Using Long Haar-like Filters Y. Higashijima 1, S. Takano 1, and K. Niijima 1 1 Department of Informatics, Kyushu University, Japan. Email: {y-higasi, takano, niijima}@i.kyushu-u.ac.jp
Face Recognition Using Long Haar-like Filters Y. Higashijima 1, S. Takano 1, and K. Niijima 1 1 Department of Informatics, Kyushu University, Japan. Email: {y-higasi, takano, niijima}@i.kyushu-u.ac.jp
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction
 Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
CV of Qixiang Ye. University of Chinese Academy of Sciences
 2012-12-12 University of Chinese Academy of Sciences Qixiang Ye received B.S. and M.S. degrees in mechanical & electronic engineering from Harbin Institute of Technology (HIT) in 1999 and 2001 respectively,
2012-12-12 University of Chinese Academy of Sciences Qixiang Ye received B.S. and M.S. degrees in mechanical & electronic engineering from Harbin Institute of Technology (HIT) in 1999 and 2001 respectively,
Face Alignment Under Various Poses and Expressions
 Face Alignment Under Various Poses and Expressions Shengjun Xin and Haizhou Ai Computer Science and Technology Department, Tsinghua University, Beijing 100084, China ahz@mail.tsinghua.edu.cn Abstract.
Face Alignment Under Various Poses and Expressions Shengjun Xin and Haizhou Ai Computer Science and Technology Department, Tsinghua University, Beijing 100084, China ahz@mail.tsinghua.edu.cn Abstract.
Learning based face hallucination techniques: A survey
 Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
An Image Based 3D Reconstruction System for Large Indoor Scenes
 36 5 Vol. 36, No. 5 2010 5 ACTA AUTOMATICA SINICA May, 2010 1 1 2 1,,,..,,,,. : 1), ; 2), ; 3),.,,. DOI,,, 10.3724/SP.J.1004.2010.00625 An Image Based 3D Reconstruction System for Large Indoor Scenes ZHANG
36 5 Vol. 36, No. 5 2010 5 ACTA AUTOMATICA SINICA May, 2010 1 1 2 1,,,..,,,,. : 1), ; 2), ; 3),.,,. DOI,,, 10.3724/SP.J.1004.2010.00625 An Image Based 3D Reconstruction System for Large Indoor Scenes ZHANG
REJECTION-BASED CLASSIFICATION FOR ACTION RECOGNITION USING A SPATIO-TEMPORAL DICTIONARY. Stefen Chan Wai Tim, Michele Rombaut, Denis Pellerin
 REJECTION-BASED CLASSIFICATION FOR ACTION RECOGNITION USING A SPATIO-TEMPORAL DICTIONARY Stefen Chan Wai Tim, Michele Rombaut, Denis Pellerin Univ. Grenoble Alpes, GIPSA-Lab, F-38000 Grenoble, France ABSTRACT
REJECTION-BASED CLASSIFICATION FOR ACTION RECOGNITION USING A SPATIO-TEMPORAL DICTIONARY Stefen Chan Wai Tim, Michele Rombaut, Denis Pellerin Univ. Grenoble Alpes, GIPSA-Lab, F-38000 Grenoble, France ABSTRACT
Facial Expression Recognition using Principal Component Analysis with Singular Value Decomposition
 ISSN: 2321-7782 (Online) Volume 1, Issue 6, November 2013 International Journal of Advance Research in Computer Science and Management Studies Research Paper Available online at: www.ijarcsms.com Facial
ISSN: 2321-7782 (Online) Volume 1, Issue 6, November 2013 International Journal of Advance Research in Computer Science and Management Studies Research Paper Available online at: www.ijarcsms.com Facial
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Latest development in image feature representation and extraction
 International Journal of Advanced Research and Development ISSN: 2455-4030, Impact Factor: RJIF 5.24 www.advancedjournal.com Volume 2; Issue 1; January 2017; Page No. 05-09 Latest development in image
International Journal of Advanced Research and Development ISSN: 2455-4030, Impact Factor: RJIF 5.24 www.advancedjournal.com Volume 2; Issue 1; January 2017; Page No. 05-09 Latest development in image
The Isometric Self-Organizing Map for 3D Hand Pose Estimation
 The Isometric Self-Organizing Map for 3D Hand Pose Estimation Haiying Guan, Rogerio S. Feris, and Matthew Turk Computer Science Department University of California, Santa Barbara {haiying,rferis,mturk}@cs.ucsb.edu
The Isometric Self-Organizing Map for 3D Hand Pose Estimation Haiying Guan, Rogerio S. Feris, and Matthew Turk Computer Science Department University of California, Santa Barbara {haiying,rferis,mturk}@cs.ucsb.edu
Arm-hand Action Recognition Based on 3D Skeleton Joints Ling RUI 1, Shi-wei MA 1,a, *, Jia-rui WEN 1 and Li-na LIU 1,2
 1 International Conference on Control and Automation (ICCA 1) ISBN: 97-1-9-39- Arm-hand Action Recognition Based on 3D Skeleton Joints Ling RUI 1, Shi-wei MA 1,a, *, Jia-rui WEN 1 and Li-na LIU 1, 1 School
1 International Conference on Control and Automation (ICCA 1) ISBN: 97-1-9-39- Arm-hand Action Recognition Based on 3D Skeleton Joints Ling RUI 1, Shi-wei MA 1,a, *, Jia-rui WEN 1 and Li-na LIU 1, 1 School
Improving Latent Fingerprint Matching Performance by Orientation Field Estimation using Localized Dictionaries
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 11, November 2014,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 11, November 2014,
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
arxiv: v1 [cs.cv] 19 May 2017
![arxiv: v1 [cs.cv] 19 May 2017](/thumbs/85/91536701.jpg "arxiv: v1 [cs.cv] 19 May 2017") Affine-Gradient Based Local Binary Pattern Descriptor for Texture Classification You Hao 1,2, Shirui Li 1,2, Hanlin Mo 1,2, and Hua Li 1,2 arxiv:1705.06871v1 [cs.cv] 19 May 2017 1 Key Laboratory of Intelligent
Affine-Gradient Based Local Binary Pattern Descriptor for Texture Classification You Hao 1,2, Shirui Li 1,2, Hanlin Mo 1,2, and Hua Li 1,2 arxiv:1705.06871v1 [cs.cv] 19 May 2017 1 Key Laboratory of Intelligent
Task analysis based on observing hands and objects by vision
 Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Static Gesture Recognition with Restricted Boltzmann Machines
 Static Gesture Recognition with Restricted Boltzmann Machines Peter O Donovan Department of Computer Science, University of Toronto 6 Kings College Rd, M5S 3G4, Canada odonovan@dgp.toronto.edu Abstract
Static Gesture Recognition with Restricted Boltzmann Machines Peter O Donovan Department of Computer Science, University of Toronto 6 Kings College Rd, M5S 3G4, Canada odonovan@dgp.toronto.edu Abstract
Gesture Recognition using Temporal Templates with disparity information
 8- MVA7 IAPR Conference on Machine Vision Applications, May 6-8, 7, Tokyo, JAPAN Gesture Recognition using Temporal Templates with disparity information Kazunori Onoguchi and Masaaki Sato Hirosaki University
8- MVA7 IAPR Conference on Machine Vision Applications, May 6-8, 7, Tokyo, JAPAN Gesture Recognition using Temporal Templates with disparity information Kazunori Onoguchi and Masaaki Sato Hirosaki University
HAND-GESTURE BASED FILM RESTORATION
 HAND-GESTURE BASED FILM RESTORATION Attila Licsár University of Veszprém, Department of Image Processing and Neurocomputing,H-8200 Veszprém, Egyetem u. 0, Hungary Email: licsara@freemail.hu Tamás Szirányi
HAND-GESTURE BASED FILM RESTORATION Attila Licsár University of Veszprém, Department of Image Processing and Neurocomputing,H-8200 Veszprém, Egyetem u. 0, Hungary Email: licsara@freemail.hu Tamás Szirányi
Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma
 Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma Presented by Hu Han Jan. 30 2014 For CSE 902 by Prof. Anil K. Jain: Selected
Robust Face Recognition via Sparse Representation Authors: John Wright, Allen Y. Yang, Arvind Ganesh, S. Shankar Sastry, and Yi Ma Presented by Hu Han Jan. 30 2014 For CSE 902 by Prof. Anil K. Jain: Selected
Detection of Small-Waving Hand by Distributed Camera System
 Detection of Small-Waving Hand by Distributed Camera System Kenji Terabayashi, Hidetsugu Asano, Takeshi Nagayasu, Tatsuya Orimo, Mutsumi Ohta, Takaaki Oiwa, and Kazunori Umeda Department of Mechanical
Detection of Small-Waving Hand by Distributed Camera System Kenji Terabayashi, Hidetsugu Asano, Takeshi Nagayasu, Tatsuya Orimo, Mutsumi Ohta, Takaaki Oiwa, and Kazunori Umeda Department of Mechanical
Object Tracking using HOG and SVM
 Object Tracking using HOG and SVM Siji Joseph #1, Arun Pradeep #2 Electronics and Communication Engineering Axis College of Engineering and Technology, Ambanoly, Thrissur, India Abstract Object detection
Object Tracking using HOG and SVM Siji Joseph #1, Arun Pradeep #2 Electronics and Communication Engineering Axis College of Engineering and Technology, Ambanoly, Thrissur, India Abstract Object detection
A Robust Gesture Recognition Using Depth Data
 A Robust Gesture Recognition Using Depth Data Hironori Takimoto, Jaemin Lee, and Akihiro Kanagawa In recent years, gesture recognition methods using depth sensor such as Kinect sensor and TOF sensor have
A Robust Gesture Recognition Using Depth Data Hironori Takimoto, Jaemin Lee, and Akihiro Kanagawa In recent years, gesture recognition methods using depth sensor such as Kinect sensor and TOF sensor have
Content Based Image Retrieval Using Color Quantizes, EDBTC and LBP Features
 Content Based Image Retrieval Using Color Quantizes, EDBTC and LBP Features 1 Kum Sharanamma, 2 Krishnapriya Sharma 1,2 SIR MVIT Abstract- To describe the image features the Local binary pattern (LBP)
Content Based Image Retrieval Using Color Quantizes, EDBTC and LBP Features 1 Kum Sharanamma, 2 Krishnapriya Sharma 1,2 SIR MVIT Abstract- To describe the image features the Local binary pattern (LBP)
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Human Gait Recognition Using Bezier Curves
 Human Gait Recognition Using Bezier Curves Pratibha Mishra Samrat Ashok Technology Institute Vidisha, (M.P.) India Shweta Ezra Dhar Polytechnic College Dhar, (M.P.) India Abstract-- Gait recognition refers
Human Gait Recognition Using Bezier Curves Pratibha Mishra Samrat Ashok Technology Institute Vidisha, (M.P.) India Shweta Ezra Dhar Polytechnic College Dhar, (M.P.) India Abstract-- Gait recognition refers
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Human detection using local shape and nonredundant
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Human detection using local shape and nonredundant binary patterns
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Human detection using local shape and nonredundant binary patterns
Comparison of Fourier Descriptors and Hu Moments for Hand Posture Recognition
 Comparison of Fourier Descriptors and Hu Moments for Hand Posture Recognition S. Conseil 1, S. Bourennane 1 and L. Martin 2 1 Institut Fresnel (CNRS UMR6133), École Centrale de Marseille, GSM Team DU de
Comparison of Fourier Descriptors and Hu Moments for Hand Posture Recognition S. Conseil 1, S. Bourennane 1 and L. Martin 2 1 Institut Fresnel (CNRS UMR6133), École Centrale de Marseille, GSM Team DU de
Face Recognition Using Vector Quantization Histogram and Support Vector Machine Classifier Rong-sheng LI, Fei-fei LEE *, Yan YAN and Qiu CHEN
 2016 International Conference on Artificial Intelligence: Techniques and Applications (AITA 2016) ISBN: 978-1-60595-389-2 Face Recognition Using Vector Quantization Histogram and Support Vector Machine
2016 International Conference on Artificial Intelligence: Techniques and Applications (AITA 2016) ISBN: 978-1-60595-389-2 Face Recognition Using Vector Quantization Histogram and Support Vector Machine
Robust Fingertip Tracking with Improved Kalman Filter
 Robust Fingertip Tracking with Improved Kalman Filter Chunyang Wang and Bo Yuan Intelligent Computing Lab, Division of Informatics Graduate School at Shenzhen, Tsinghua University Shenzhen 518055, P.R.
Robust Fingertip Tracking with Improved Kalman Filter Chunyang Wang and Bo Yuan Intelligent Computing Lab, Division of Informatics Graduate School at Shenzhen, Tsinghua University Shenzhen 518055, P.R.
Object detection using non-redundant local Binary Patterns
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
Color Local Texture Features Based Face Recognition
 Color Local Texture Features Based Face Recognition Priyanka V. Bankar Department of Electronics and Communication Engineering SKN Sinhgad College of Engineering, Korti, Pandharpur, Maharashtra, India
Color Local Texture Features Based Face Recognition Priyanka V. Bankar Department of Electronics and Communication Engineering SKN Sinhgad College of Engineering, Korti, Pandharpur, Maharashtra, India
Action Recognition in Video by Sparse Representation on Covariance Manifolds of Silhouette Tunnels
 Action Recognition in Video by Sparse Representation on Covariance Manifolds of Silhouette Tunnels Kai Guo, Prakash Ishwar, and Janusz Konrad Department of Electrical & Computer Engineering Motivation
Action Recognition in Video by Sparse Representation on Covariance Manifolds of Silhouette Tunnels Kai Guo, Prakash Ishwar, and Janusz Konrad Department of Electrical & Computer Engineering Motivation
LVQ FOR HAND GESTURE RECOGNITION BASED ON DCT AND PROJECTION FEATURES
 Journal of ELECTRICAL ENGINEERING, VOL. 60, NO. 4, 2009, 204 208 LVQ FOR HAND GESTURE RECOGNITION BASED ON DCT AND PROJECTION FEATURES Ahmed Said Tolba Mohamed Abu Elsoud Osama Abu Elnaser The purpose
Journal of ELECTRICAL ENGINEERING, VOL. 60, NO. 4, 2009, 204 208 LVQ FOR HAND GESTURE RECOGNITION BASED ON DCT AND PROJECTION FEATURES Ahmed Said Tolba Mohamed Abu Elsoud Osama Abu Elnaser The purpose
An Adaptive Threshold LBP Algorithm for Face Recognition
 An Adaptive Threshold LBP Algorithm for Face Recognition Xiaoping Jiang 1, Chuyu Guo 1,*, Hua Zhang 1, and Chenghua Li 1 1 College of Electronics and Information Engineering, Hubei Key Laboratory of Intelligent
An Adaptive Threshold LBP Algorithm for Face Recognition Xiaoping Jiang 1, Chuyu Guo 1,*, Hua Zhang 1, and Chenghua Li 1 1 College of Electronics and Information Engineering, Hubei Key Laboratory of Intelligent
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Dynamic Human Shape Description and Characterization
 Dynamic Human Shape Description and Characterization Z. Cheng*, S. Mosher, Jeanne Smith H. Cheng, and K. Robinette Infoscitex Corporation, Dayton, Ohio, USA 711 th Human Performance Wing, Air Force Research
Dynamic Human Shape Description and Characterization Z. Cheng*, S. Mosher, Jeanne Smith H. Cheng, and K. Robinette Infoscitex Corporation, Dayton, Ohio, USA 711 th Human Performance Wing, Air Force Research
Su et al. Shape Descriptors - III
 Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Real-Time Continuous Action Detection and Recognition Using Depth Images and Inertial Signals
 Real-Time Continuous Action Detection and Recognition Using Depth Images and Inertial Signals Neha Dawar 1, Chen Chen 2, Roozbeh Jafari 3, Nasser Kehtarnavaz 1 1 Department of Electrical and Computer Engineering,
Real-Time Continuous Action Detection and Recognition Using Depth Images and Inertial Signals Neha Dawar 1, Chen Chen 2, Roozbeh Jafari 3, Nasser Kehtarnavaz 1 1 Department of Electrical and Computer Engineering,
Robust Face Recognition via Sparse Representation
 Robust Face Recognition via Sparse Representation Panqu Wang Department of Electrical and Computer Engineering University of California, San Diego La Jolla, CA 92092 pawang@ucsd.edu Can Xu Department of
Robust Face Recognition via Sparse Representation Panqu Wang Department of Electrical and Computer Engineering University of California, San Diego La Jolla, CA 92092 pawang@ucsd.edu Can Xu Department of
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Multi Focus Image Fusion Using Joint Sparse Representation
 Multi Focus Image Fusion Using Joint Sparse Representation Prabhavathi.P 1 Department of Information Technology, PG Student, K.S.R College of Engineering, Tiruchengode, Tamilnadu, India 1 ABSTRACT: The
Multi Focus Image Fusion Using Joint Sparse Representation Prabhavathi.P 1 Department of Information Technology, PG Student, K.S.R College of Engineering, Tiruchengode, Tamilnadu, India 1 ABSTRACT: The
Histogram of 3D Facets: A Characteristic Descriptor for Hand Gesture Recognition
 Histogram of 3D Facets: A Characteristic Descriptor for Hand Gesture Recognition Chenyang Zhang, Xiaodong Yang, and YingLi Tian Department of Electrical Engineering The City College of New York, CUNY {czhang10,
Histogram of 3D Facets: A Characteristic Descriptor for Hand Gesture Recognition Chenyang Zhang, Xiaodong Yang, and YingLi Tian Department of Electrical Engineering The City College of New York, CUNY {czhang10,
Adaptive Zoom Distance Measuring System of Camera Based on the Ranging of Binocular Vision
 Adaptive Zoom Distance Measuring System of Camera Based on the Ranging of Binocular Vision Zhiyan Zhang 1, Wei Qian 1, Lei Pan 1 & Yanjun Li 1 1 University of Shanghai for Science and Technology, China
Adaptive Zoom Distance Measuring System of Camera Based on the Ranging of Binocular Vision Zhiyan Zhang 1, Wei Qian 1, Lei Pan 1 & Yanjun Li 1 1 University of Shanghai for Science and Technology, China
Unsupervised Human Members Tracking Based on an Silhouette Detection and Analysis Scheme
 Unsupervised Human Members Tracking Based on an Silhouette Detection and Analysis Scheme Costas Panagiotakis and Anastasios Doulamis Abstract In this paper, an unsupervised, automatic video human members(human
Unsupervised Human Members Tracking Based on an Silhouette Detection and Analysis Scheme Costas Panagiotakis and Anastasios Doulamis Abstract In this paper, an unsupervised, automatic video human members(human
Expanding gait identification methods from straight to curved trajectories
 Expanding gait identification methods from straight to curved trajectories Yumi Iwashita, Ryo Kurazume Kyushu University 744 Motooka Nishi-ku Fukuoka, Japan yumi@ieee.org Abstract Conventional methods
Expanding gait identification methods from straight to curved trajectories Yumi Iwashita, Ryo Kurazume Kyushu University 744 Motooka Nishi-ku Fukuoka, Japan yumi@ieee.org Abstract Conventional methods
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
COMPARISON OF FOURIER DESCRIPTORS AND HU MOMENTS FOR HAND POSTURE RECOGNITION
 COMPARISO OF FOURIER DESCRIPTORS AD HU MOMETS FOR HAD POSTURE RECOGITIO S. Conseil 1, S. Bourennane 1 and L. Martin 2 1 Institut Fresnel (CRS UMR6133), École Centrale de Marseille DU de Saint Jérôme, F-13013
COMPARISO OF FOURIER DESCRIPTORS AD HU MOMETS FOR HAD POSTURE RECOGITIO S. Conseil 1, S. Bourennane 1 and L. Martin 2 1 Institut Fresnel (CRS UMR6133), École Centrale de Marseille DU de Saint Jérôme, F-13013
K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors
 K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors Shao-Tzu Huang, Chen-Chien Hsu, Wei-Yen Wang International Science Index, Electrical and Computer Engineering waset.org/publication/0007607
K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors Shao-Tzu Huang, Chen-Chien Hsu, Wei-Yen Wang International Science Index, Electrical and Computer Engineering waset.org/publication/0007607
Subpixel Corner Detection Using Spatial Moment 1)
") Vol.31, No.5 ACTA AUTOMATICA SINICA September, 25 Subpixel Corner Detection Using Spatial Moment 1) WANG She-Yang SONG Shen-Min QIANG Wen-Yi CHEN Xing-Lin (Department of Control Engineering, Harbin Institute
Vol.31, No.5 ACTA AUTOMATICA SINICA September, 25 Subpixel Corner Detection Using Spatial Moment 1) WANG She-Yang SONG Shen-Min QIANG Wen-Yi CHEN Xing-Lin (Department of Control Engineering, Harbin Institute
IMAGE SUPER-RESOLUTION BASED ON DICTIONARY LEARNING AND ANCHORED NEIGHBORHOOD REGRESSION WITH MUTUAL INCOHERENCE
 IMAGE SUPER-RESOLUTION BASED ON DICTIONARY LEARNING AND ANCHORED NEIGHBORHOOD REGRESSION WITH MUTUAL INCOHERENCE Yulun Zhang 1, Kaiyu Gu 2, Yongbing Zhang 1, Jian Zhang 3, and Qionghai Dai 1,4 1 Shenzhen
IMAGE SUPER-RESOLUTION BASED ON DICTIONARY LEARNING AND ANCHORED NEIGHBORHOOD REGRESSION WITH MUTUAL INCOHERENCE Yulun Zhang 1, Kaiyu Gu 2, Yongbing Zhang 1, Jian Zhang 3, and Qionghai Dai 1,4 1 Shenzhen
Radially Defined Local Binary Patterns for Hand Gesture Recognition
 Radially Defined Local Binary Patterns for Hand Gesture Recognition J. V. Megha 1, J. S. Padmaja 2, D.D. Doye 3 1 SGGS Institute of Engineering and Technology, Nanded, M.S., India, meghavjon@gmail.com
Radially Defined Local Binary Patterns for Hand Gesture Recognition J. V. Megha 1, J. S. Padmaja 2, D.D. Doye 3 1 SGGS Institute of Engineering and Technology, Nanded, M.S., India, meghavjon@gmail.com
International Journal of Modern Engineering and Research Technology
 Volume 4, Issue 3, July 2017 ISSN: 2348-8565 (Online) International Journal of Modern Engineering and Research Technology Website: http://www.ijmert.org Email: editor.ijmert@gmail.com A Novel Approach
Volume 4, Issue 3, July 2017 ISSN: 2348-8565 (Online) International Journal of Modern Engineering and Research Technology Website: http://www.ijmert.org Email: editor.ijmert@gmail.com A Novel Approach
An Integrated Face Recognition Algorithm Based on Wavelet Subspace
 , pp.20-25 http://dx.doi.org/0.4257/astl.204.48.20 An Integrated Face Recognition Algorithm Based on Wavelet Subspace Wenhui Li, Ning Ma, Zhiyan Wang College of computer science and technology, Jilin University,
, pp.20-25 http://dx.doi.org/0.4257/astl.204.48.20 An Integrated Face Recognition Algorithm Based on Wavelet Subspace Wenhui Li, Ning Ma, Zhiyan Wang College of computer science and technology, Jilin University,
Generic Face Alignment Using an Improved Active Shape Model
 Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Gait analysis for person recognition using principal component analysis and support vector machines
 Gait analysis for person recognition using principal component analysis and support vector machines O V Strukova 1, LV Shiripova 1 and E V Myasnikov 1 1 Samara National Research University, Moskovskoe
Gait analysis for person recognition using principal component analysis and support vector machines O V Strukova 1, LV Shiripova 1 and E V Myasnikov 1 1 Samara National Research University, Moskovskoe
Fast trajectory matching using small binary images
 Title Fast trajectory matching using small binary images Author(s) Zhuo, W; Schnieders, D; Wong, KKY Citation The 3rd International Conference on Multimedia Technology (ICMT 2013), Guangzhou, China, 29
Title Fast trajectory matching using small binary images Author(s) Zhuo, W; Schnieders, D; Wong, KKY Citation The 3rd International Conference on Multimedia Technology (ICMT 2013), Guangzhou, China, 29
Eye Detection by Haar wavelets and cascaded Support Vector Machine
 Eye Detection by Haar wavelets and cascaded Support Vector Machine Vishal Agrawal B.Tech 4th Year Guide: Simant Dubey / Amitabha Mukherjee Dept of Computer Science and Engineering IIT Kanpur - 208 016
Eye Detection by Haar wavelets and cascaded Support Vector Machine Vishal Agrawal B.Tech 4th Year Guide: Simant Dubey / Amitabha Mukherjee Dept of Computer Science and Engineering IIT Kanpur - 208 016
A novel template matching method for human detection
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
Human Action Recognition Using Independent Component Analysis
 Human Action Recognition Using Independent Component Analysis Masaki Yamazaki, Yen-Wei Chen and Gang Xu Department of Media echnology Ritsumeikan University 1-1-1 Nojihigashi, Kusatsu, Shiga, 525-8577,
Human Action Recognition Using Independent Component Analysis Masaki Yamazaki, Yen-Wei Chen and Gang Xu Department of Media echnology Ritsumeikan University 1-1-1 Nojihigashi, Kusatsu, Shiga, 525-8577,
Face Recognition Based on LDA and Improved Pairwise-Constrained Multiple Metric Learning Method
 Journal of Information Hiding and Multimedia Signal Processing c 2016 ISSN 2073-4212 Ubiquitous International Volume 7, Number 5, September 2016 Face Recognition ased on LDA and Improved Pairwise-Constrained
Journal of Information Hiding and Multimedia Signal Processing c 2016 ISSN 2073-4212 Ubiquitous International Volume 7, Number 5, September 2016 Face Recognition ased on LDA and Improved Pairwise-Constrained
Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization
 Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization Jung H. Oh, Gyuho Eoh, and Beom H. Lee Electrical and Computer Engineering, Seoul National University,
Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization Jung H. Oh, Gyuho Eoh, and Beom H. Lee Electrical and Computer Engineering, Seoul National University,
Fast 3D Edge Detection by Using Decision Tree from Depth Image
 015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 8 - Oct, 015. Hamburg, Germany Fast 3D Edge Detection by Using Decision Tree from Depth Image
015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 8 - Oct, 015. Hamburg, Germany Fast 3D Edge Detection by Using Decision Tree from Depth Image
An Improved Pre-classification Method for Offline Handwritten Chinese Character Using Four Corner Feature
 ISBN 978-952-5726-04-6 (Print), 978-952-5726-05-3 (CD-ROM) Proceedings of the International Symposium on Intelligent Information Systems and Applications (IISA 09) Qingdao, P. R. China, Oct. 28-30, 2009,
ISBN 978-952-5726-04-6 (Print), 978-952-5726-05-3 (CD-ROM) Proceedings of the International Symposium on Intelligent Information Systems and Applications (IISA 09) Qingdao, P. R. China, Oct. 28-30, 2009,
A Rapid Automatic Image Registration Method Based on Improved SIFT
 Available online at www.sciencedirect.com Procedia Environmental Sciences 11 (2011) 85 91 A Rapid Automatic Image Registration Method Based on Improved SIFT Zhu Hongbo, Xu Xuejun, Wang Jing, Chen Xuesong,
Available online at www.sciencedirect.com Procedia Environmental Sciences 11 (2011) 85 91 A Rapid Automatic Image Registration Method Based on Improved SIFT Zhu Hongbo, Xu Xuejun, Wang Jing, Chen Xuesong,
A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models
 A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models Emanuele Ruffaldi Lorenzo Peppoloni Alessandro Filippeschi Carlo Alberto Avizzano 2014 IEEE International
A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models Emanuele Ruffaldi Lorenzo Peppoloni Alessandro Filippeschi Carlo Alberto Avizzano 2014 IEEE International
Accelerometer Gesture Recognition
 Accelerometer Gesture Recognition Michael Xie xie@cs.stanford.edu David Pan napdivad@stanford.edu December 12, 2014 Abstract Our goal is to make gesture-based input for smartphones and smartwatches accurate
Accelerometer Gesture Recognition Michael Xie xie@cs.stanford.edu David Pan napdivad@stanford.edu December 12, 2014 Abstract Our goal is to make gesture-based input for smartphones and smartwatches accurate
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Abstract. 1 Introduction. 2 Motivation. Information and Communication Engineering October 29th 2010
 Information and Communication Engineering October 29th 2010 A Survey on Head Pose Estimation from Low Resolution Image Sato Laboratory M1, 48-106416, Isarun CHAMVEHA Abstract Recognizing the head pose
Information and Communication Engineering October 29th 2010 A Survey on Head Pose Estimation from Low Resolution Image Sato Laboratory M1, 48-106416, Isarun CHAMVEHA Abstract Recognizing the head pose
Model-based segmentation and recognition from range data
 Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
A Fast Personal Palm print Authentication based on 3D-Multi Wavelet Transformation
 A Fast Personal Palm print Authentication based on 3D-Multi Wavelet Transformation * A. H. M. Al-Helali, * W. A. Mahmmoud, and * H. A. Ali * Al- Isra Private University Email: adnan_hadi@yahoo.com Abstract:
A Fast Personal Palm print Authentication based on 3D-Multi Wavelet Transformation * A. H. M. Al-Helali, * W. A. Mahmmoud, and * H. A. Ali * Al- Isra Private University Email: adnan_hadi@yahoo.com Abstract:
Research on Robust Local Feature Extraction Method for Human Detection
 Waseda University Doctoral Dissertation Research on Robust Local Feature Extraction Method for Human Detection TANG, Shaopeng Graduate School of Information, Production and Systems Waseda University Feb.
Waseda University Doctoral Dissertation Research on Robust Local Feature Extraction Method for Human Detection TANG, Shaopeng Graduate School of Information, Production and Systems Waseda University Feb.
Real-Time Model-Based Hand Localization for Unsupervised Palmar Image Acquisition
 Real-Time Model-Based Hand Localization for Unsupervised Palmar Image Acquisition Ivan Fratric 1, Slobodan Ribaric 1 1 University of Zagreb, Faculty of Electrical Engineering and Computing, Unska 3, 10000
Real-Time Model-Based Hand Localization for Unsupervised Palmar Image Acquisition Ivan Fratric 1, Slobodan Ribaric 1 1 University of Zagreb, Faculty of Electrical Engineering and Computing, Unska 3, 10000
Application of Geometry Rectification to Deformed Characters Recognition Liqun Wang1, a * and Honghui Fan2
 6th International Conference on Electronic, Mechanical, Information and Management (EMIM 2016) Application of Geometry Rectification to Deformed Characters Liqun Wang1, a * and Honghui Fan2 1 School of
6th International Conference on Electronic, Mechanical, Information and Management (EMIM 2016) Application of Geometry Rectification to Deformed Characters Liqun Wang1, a * and Honghui Fan2 1 School of
Face Recognition Using SIFT- PCA Feature Extraction and SVM Classifier
 IOSR Journal of VLSI and Signal Processing (IOSR-JVSP) Volume 5, Issue 2, Ver. II (Mar. - Apr. 2015), PP 31-35 e-issn: 2319 4200, p-issn No. : 2319 4197 www.iosrjournals.org Face Recognition Using SIFT-
IOSR Journal of VLSI and Signal Processing (IOSR-JVSP) Volume 5, Issue 2, Ver. II (Mar. - Apr. 2015), PP 31-35 e-issn: 2319 4200, p-issn No. : 2319 4197 www.iosrjournals.org Face Recognition Using SIFT-
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
SOME stereo image-matching methods require a user-selected
 IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 3, NO. 2, APRIL 2006 207 Seed Point Selection Method for Triangle Constrained Image Matching Propagation Qing Zhu, Bo Wu, and Zhi-Xiang Xu Abstract In order
IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 3, NO. 2, APRIL 2006 207 Seed Point Selection Method for Triangle Constrained Image Matching Propagation Qing Zhu, Bo Wu, and Zhi-Xiang Xu Abstract In order
Adaptive Skin Color Classifier for Face Outline Models
 Adaptive Skin Color Classifier for Face Outline Models M. Wimmer, B. Radig, M. Beetz Informatik IX, Technische Universität München, Germany Boltzmannstr. 3, 87548 Garching, Germany [wimmerm, radig, beetz]@informatik.tu-muenchen.de
Adaptive Skin Color Classifier for Face Outline Models M. Wimmer, B. Radig, M. Beetz Informatik IX, Technische Universität München, Germany Boltzmannstr. 3, 87548 Garching, Germany [wimmerm, radig, beetz]@informatik.tu-muenchen.de
Disguised Face Identification Based Gabor Feature and SVM Classifier
 Disguised Face Identification Based Gabor Feature and SVM Classifier KYEKYUNG KIM, SANGSEUNG KANG, YUN KOO CHUNG and SOOYOUNG CHI Department of Intelligent Cognitive Technology Electronics and Telecommunications
Disguised Face Identification Based Gabor Feature and SVM Classifier KYEKYUNG KIM, SANGSEUNG KANG, YUN KOO CHUNG and SOOYOUNG CHI Department of Intelligent Cognitive Technology Electronics and Telecommunications
Discriminative sparse model and dictionary learning for object category recognition
 Discriative sparse model and dictionary learning for object category recognition Xiao Deng and Donghui Wang Institute of Artificial Intelligence, Zhejiang University Hangzhou, China, 31007 {yellowxiao,dhwang}@zju.edu.cn
Discriative sparse model and dictionary learning for object category recognition Xiao Deng and Donghui Wang Institute of Artificial Intelligence, Zhejiang University Hangzhou, China, 31007 {yellowxiao,dhwang}@zju.edu.cn
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.