Image Segmentation Via Iterative Geodesic Averaging
|
|
|
- Jesse Reynolds
- 5 years ago
- Views:
Transcription
1 Image Segmentation Via Iterative Geodesic Averaging Asmaa Hosni, Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, Vienna University of Technology Favoritenstr. 9-11/188/2, A-1040 Vienna, Austria [asmaa, bleyer, Abstract We present a simple and fast method for performing unsupervised segmentation. Our method works by centering a square window on each pixel of the input image. Each pixel is then assigned to a new color which is computed by averaging the pixel colors inside the window. The idea is that if this averaging operation is repeated a few times then we should obtain an image in which pixels of the same color surface are assigned to the same (or at least to very similar) color values. Consequently, the desired color segments are formed by groups of spatially neighboring pixels that share the same color in the convolved image. Obviously, our method would deliver poor performance if the averaging operation is applied in a naive manner, as pixel colors of different segments would be mixed. To overcome this problem, we propose to compute a geodesic weight mask that regulates a pixel s influence in the averaging operation. A pixel s weight in the window is determined by computing the geodesic distance to the center pixel. In other words, we enforce that a pixel obtains high influence only if there exists a path to the center pixel along which the color does not change significantly (connectivity). The proposed method is evaluated on some widely used test images. Our method seems to produce accurate segmentation results and to capture object outlines correctly. We show by quantitative evaluation that our segmentation algorithm outperforms two competing segmentation methods. 1. Introduction Unsupervised image segmentation is one of the most important tasks in low-level vision. It often represents an essential step for image analysis and image understanding. In this paper, we concentrate on color segmentation. Therefore, our goal is to divide an image into regions of homogeneous colors. The contribution of this paper lies in a simple and effective method for performing the color segmentation task. The building block of our algorithm is formed by the geodesic distance transform. We center a window on each pixel of the input image. Geodesic distances are then computed inside the window to determine a weight mask. The derived masks serve to compute a weighted color average for each pixel of the image. The idea is to iterate this averaging procedure. After some iterations it can be observed that pixels of a homogenous region show the same color value. Therefore, we build our segments by grouping spatially neighboring pixels of the same color in the iteratively averaged image. Although in a quite different form, the geodesic distance transform has already been applied in image segmentation. In [7], geodesic distances are employed for integrating spatial proximity information into a graph-based segmentation algorithm. Other papers [1, 6] use the geodesic distance for performing foreground/background segmentation. Here, the geodesic distance is computed between userdefined foreground and background regions and not in individual windows as in our work. In the context of previous work, our method is also related to approaches that use the geodesic distance transform in other computer vision research areas. For example, geodesic windows have been applied in local image denoising approaches [2, 8, 9]. These local approaches assume that a small neighborhood around a pixel contains sufficient information to remove noise from the pixel s original color. The original color is therefore reconstructed by using a function that operates on the colors of all pixels inside the window. We also consider our segmentation algorithm related to the work of [11]. Here, a bilateral filter is iteratively applied to generate cartoon-like images. Apart from cartoonization being a different application, we believe that our geodesic filter is better-suited for generating regions of piecewise constant colors, since we implement the concept of connectivity. 2. Algorithm Figure 1 presents an overview of our algorithm. The input for our algorithm is formed by a color image (Figure
 Geodesic mask computation: (i) Zoomed-in view. (ii) Computed geodesic mask. (c) Segments after iterative averaging. (d) Segments after segment merging. 1(a)).")

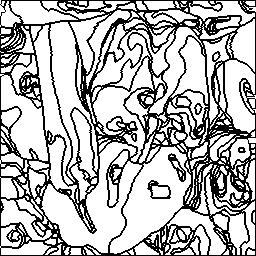
2 Input Image Geodesic Mask Segments after Iterative Geodesic Filtering Segments After Merging ( i ) ( ii ) ( a ) ( b ) ( c ) ( d ) Figure 1. Outline of our algorithm. (a) Input image. (b) Geodesic mask computation: (i) Zoomed-in view. (ii) Computed geodesic mask. (c) Segments after iterative averaging. (d) Segments after segment merging. 1(a)). We center a window on each pixel of the input image. The colors of pixels inside the window are averaged. Here, it is important to assign different influence to the pixels of the window, since we want to avoid mixing colors of different color surfaces. Ideally, pixels that lie on the same color surface as the center pixel obtain high influence, while the influence of pixels outside the color surface is low. We implement this concept by computing the geodesic distance from the center pixel to all other pixels of the window. The effect is that a pixel can only have high influence if there is a path to the center pixel along which the color remains nearly constant. In other words, the pixel needs to be connected to its center pixel. Figure 1(b) shows a geodesic mask that we have computed for the marked pixel of Figure 1(a). It is important to notice that high influence is only assigned to pixels of the rectangular structure on which also the center pixel resides. This is because only these points are connected to the center pixel. In the image, there is also a circular structure that belongs to a different object. Although pixels of the circular structure show similar color in comparison to the center pixel, they are not connected. Consequently, their influence is low. We can therefore avoid mixing the colors of these different objects in the subsequent averaging procedure. This is an advantage over using other filtering methods such as the bilateral filtering [10] where the concept of connectivity is not implemented. Once the geodesic masks are determined, we compute a new color for each pixel of the image. A pixel s new color is thereby obtained by computing the weighted average of color values inside the window using the weights of the corresponding geodesic mask. This averaging procedure is repeated a few times. After some iterations the averaged image consists of regions of piecewise constant colors (Figure 1(c)). This result can already be interpreted as the final segmentation output. Alternatively, we provide a simple segment merging procedure to reduce the number of segments (Figure 1(d)). We go into detail on the individual steps in the following sections Geodesic Masks The basic idea in the proposed segmentation method is to compute the support weights within a square window via the use of geodesic distances. This is explained as follows. The geodesic distance D(p, c) between a pixel p of the support window and the window s center c is defined as the shortest path that connects p with c in the color volume: D(p, c) = min P P p,c d(p). (1) Here, P p,c denotes the set of all paths between p and c. A path P is defined as a sequence of spatially neighbouring points in 8-connectivity {p 1, p 2,, p n }. The costs d() of a path are computed by i=n d(p) = d C (p i, p i 1 ) (2) i=2 with d c () being a function that determines the color difference. This function is implemented by d C (p, q) = i=3 (f i (p) f i (q)) 2 (3) i=1 with f i (p) denoting the value of the i th color channel at pixel p. In our implementation, we represent color using the RGB system. Intuitively spoken, the geodesic distance from pixel p to the window center c is low, if there exists a path between these points along which the color varies only slightly. We refer to this property as connectivity. Low geodesic distances should therefore convert into high support weights.
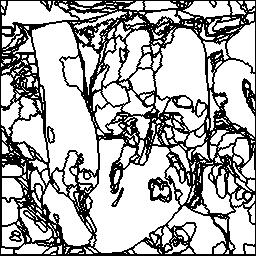
3 Kp p K p (a) (b) Figure 2. Approximation of the geodesic distances inside a window. (a) Forward pass. (b) Backward pass. The function w() implements this conversion by ( ) D(p, c) w(p, c) = exp γ with γ being a user-defined parameter that defines the strength of the resulting segmentation. Small values of γ thereby lead to a large number of segments, whereas large values lead to a smaller number of segments. We apply the method of [3] for efficiently approximating the geodesic distances of each pixel within the window to the center pixel (equation (1)). This method is reviewed as follows. Each pixel p inside the window is assigned to costs C(p). Initially, the costs of the center pixel are set to 0, while the costs of all other pixels are set to a large constant value. In the forward pass of the algorithm, we traverse the support window in a row major order. The costs of a pixel p are thereby updated by p (4) C(p) := min q K p C(q) + d C (p, q) (5) with the kernel K p being a set of pixels consisting of p itself as well as its left, left upper, upper and right upper neighbours (Figure 2(a)). The cost update is thereby performed immediately so that the new costs already affect the cost computation of the next pixel. Once the forward pass is completed, we invoke the backward pass. This pass traverses the window in reverse direction (see Figure 2(b)). It thereby updates the costs using equation (5) in conjunction with the kernel K p of Figure 2(b). Forward and backward passes are iterated. (In our experiments, we found three iterations to be sufficient for giving reasonable results.) The final costs C(p) represent our estimate of the geodesic distance of p to the center pixel. Figure 3 shows some examples of computed geodesic masks at some specified pixels in the Peppers and House images Iterative Color Averaging After computing the geodesic weight masks we compute a new color for each pixel. This is accomplished by calculating the weighted average for each color channel: f i(c) = p W c w(p, c) f i (p). (6) p W c w(p, c) Here, W c represents the set of all pixels that form the window centered on pixel c. Once we have determined the filtered image I, we can repeat this procedure. We therefore apply geodesic filtering on I to obtain I and so on. In our experiments, we have used three iterations. The result of the iterative filtering is an image of piecewise constant colors. We can interpret groups of neighboring pixels that share the same color as our final segments. Optionally, we can further try to reduce the number of segments in a segment merging step that is described in the following section Segment Merging Our segment merging procedure is straightforward. Let us assume that we have two segments S and T. For merging S and T, they need to fulfill two criteria: 1. S and T are spatial neighbors, i.e. they have a common border in 4-connectivity. 2. The difference in colors between S and T is smaller than a pre-specified threshold thr. We record all pairs of segments that fulfill our criteria. In the segment update step, we enforce that two segments that form a pair are part of the same new segment. For example, we have the pairs < S, T > and < S, U > with U being another segment. Since we enforce that pairs of segments must lie in the same new segment, S, T and U must all lie in the same new segment after the segment update step. Once the new segments are known, we update each segment s color by computing the mean color over all pixels inside the segment. We then repeat our procedure until there are no segments left to merge. Our algorithm also offers the possibility to define a threshold on the minimum region size minr. Segments whose number of pixels is smaller than minr will be merged with the spatially neighboring segment of the most similar color. 3. Experimental Results To evaluate the performance of our algorithm, we run our method using constant parameter settings. In our experiments, we set the parameters as follows: γ = 25 (segmentation strength), thr = 25 (color difference threshold in the segment merging step) and minr = 20 (minimum region size). The size of the window used in the color averaging procedure is set to 9 9 pixels. We have estimated these parameters empirically in order to generate good-quality results. To be fair, we have also used the same parameter tuning procedure for the two competing segmentation algorithms that we use for performance comparison. These algorithms are described in the following.
4 (a) (b) Figure 3. Examples of geodesic masks. (a) Masks computed for the Peppers image. (b) Masks computed for the House image. As a first competitor, we apply the mean shift algorithm [5]. We have chosen this algorithm due to its popularity in the vision community. As a second competitor, we employ a method that is identical to our algorithm except that we use a different way for computing the weight masks used in the color averaging procedure. Instead of computing the weights in equation (4) via the geodesic distance transform, we apply a bilateral filter [10]. Our test set is composed of eight real-world images that are widely adopted in the image segmentation literature. These images are: House, Peppers, Lena, Baboon, Flowers, Sailboat, Pens and Yacht. The images have different color segmentation complexities. Figure 4 shows the results of our experiment. As can be seen from Figure 4(d), the eight test images are well segmented by our segmentation algorithm. Object edges are well preserved in all test images. To obtain quantitative results, we use three evaluation metrics proposed in the literature. These metrics are: (1) the number of segmented regions for the same setting of the parameter minr, (2) Goodness and (3) computation time. We compute the Goodness function F as defined in [4] by F(I) = R ( R e 2 ( ) ) 2 i 1 + log(a i ) + R(Ai ). (7) i=1 Here, I is the image to be segmented and R is the number of regions in the segmented image. A i denotes the area of the i th region (number of pixels). The function R(A i ) returns the number of segments having identical area as A i. Finally, e i is the difference in color between the i th segment in the segmented and original images. For example, e can be derived by computing the absolute color difference between images of Figure 4(a) and the color images of Figure 4(b). In general, a good segmentation result will lead to small values of F. In the context of computation time, our implementation can be divided into three components: (1) geodesic weights computation, (2) the pixel averaging operation and (3) the A i segment merging operation. We have implemented components (1) and (2) on the Graphics Processing Unit (GPU), whereas component (3) is implemented on the CPU. Note that a major advantage of our simple segmentation strategy is that its parallelization is very straightforward. In our implementation, each processor computes the geodesic weight mask and the averaging procedure for a single pixel. As a consequence, the computational performance of our algorithm is relatively high. Table 1 shows the quantitative results for the images of Figure 4. It can be depicted that the performance of our algorithm seems to be superior in comparison to the mean shift algorithm and to the method using the bilateral filter. Our algorithm shows better Goodness, a smaller number of segments and a faster computation time. Table 1 also shows that for highly textured images with high color complexities (e.g. Baboon, Flowers, Sailboat and Pens), the performance of mean shift and the bilateral filter algorithm are relatively poor, since they tend to over-segment these images. In contrast to this, our algorithm performs relatively well on these images. In the context of faster computation times, it is not surprising that our algorithm outperforms the mean shift method, since the mean shift algorithm does not use the graphics hardware. It would be interesting to test whether a comparable computational behavior can be achieved by implementing the mean shift algorithm on the GPU in future work. In order to avoid the labor-intensive task of porting the bilateral method to the GPU, we have also used a CPU version of this segmentation algorithm. 4. Conclusions We have presented a method for color segmentation, which is based on the geodesic distance transform. Our algorithm is simple and can easily be parallelized, which enables a fast GPU-based implementation. Another advantage is that our method seems to correctly preserve object boundaries in the segmented image. In the results, we have shown that our algorithm can compete with the popular mean shift



")
")



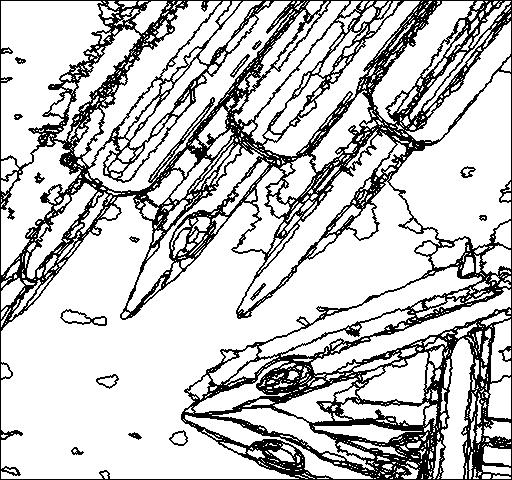


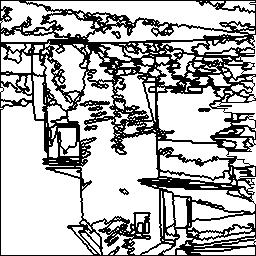















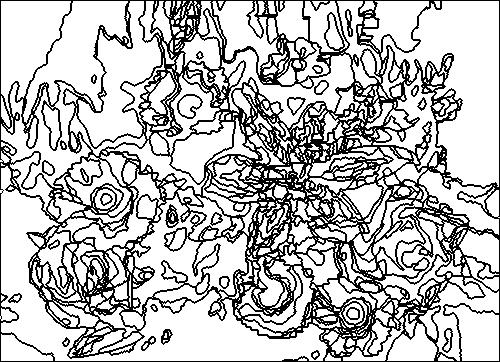



5 House Peppers Lena Baboon Flowers Sailboat Pens Yacht (a) (b) (c) (d) Figure 4. Segmentation results. We use two representations for displaying the segmentation results. In the left images of (b), (c) and (d), pixels of the same segment are given the same color value. In the right images, we plot the segment borders. (a) Input images. (b) Results of the mean shift algorithm [5]. (c) Results of the method using bilateral segmentation. (d) Results computed by the proposed algorithm.
6 Image Size Number of Regions Goodness Time(sec.) Mean Shift Bilateral Filter Our Algorithm Mean Shift Bilateral Filter Our Algorithm Mean Shift Bilateral Filter Our Algorithm House 256 x Peppers 512 x Lena 512 x Baboon 512 x Flowers 512 x Sailboat 512 x Pens 512 x Yacht 512 x Table 1. Quantitative results for the mean shift method, bilateral segmentation and our algorithm. segmentation algorithm of [5] and a method in which we replace the geodesic weight computation with a bilateral one. In future work, we will concentrate on further improving the computational efficiency of our algorithm to achieve real-time frame rates. International Conference on Computer Graphics and Interactive Techniques, , 4 [11] H. Winnemöller, S. C. Olsen, and B. Gooch. Real-time video abstraction. ACM Transactions on Graphics, 25(3): , Acknowledgements Asmaa Hosni is supported by a One-World Scholarship of the Austrian Orient Society Hammer-Purgstall. Financial support has also been obtained from the Austrian Science Fund (FWF) under project P19797 and the Vienna Science and Technology Fund (WWTF) under project ICT References [1] X. Bai and G. Sapiro. A geodesic framework for fast interactive image and video segmentation and matting. In ICCV, [2] L. Bertelli and B. Manjunath. Edge preserving filters using geodesic distances on weighted orthogonal domains. In ICIP, volume 1, pages , [3] G. Borgefors. Distance transformations in digital images. Computer Vision, Graphics and Image Processing, 34(3): , [4] M. Borsotti, P. Campadelli, and R. Schettini. Quantitative evaluation of color image segmentation results. In Pattern Recognition Letters, volume 19, pages , [5] D. Comaniciu and P. Meer. Mean shift: A robust approach toward feature space analysis. In PAMI, volume 24, pages , , 5, 6 [6] A. Criminisi, T. Sharp, and A. Blake. Geos: Geodesic image segmentation. In ECCV, pages , [7] G. Economou, V. Pothos, and A. Ifantis. Geodesic distance and MST based image segmentation. In XII European Signal Processing Conference (EUSIPCO 2004), pages , [8] J. Grazzini and P. Soille. Adaptive morphological filtering using similarities based on geodesic time. Lecture Notes in Computer Science, 4992: , [9] J. Grazzini and P. Soille. Edge-preserving smoothing using a similarity measure in adaptive geodesic neighbourhoods. Journal of Pattern Recognition, [10] S. Paris, P. Kornprobst, J. Tumblin, and F. Durand. A gentle introduction to bilateral filtering and its applications. In
Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation
 ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Evaluation of Different Methods for Using Colour Information in Global Stereo Matching Approaches
 Evaluation of Different Methods for Using Colour Information in Global Stereo Matching Approaches Michael Bleyer 1, Sylvie Chambon 2, Uta Poppe 1 and Margrit Gelautz 1 1 Vienna University of Technology,
Evaluation of Different Methods for Using Colour Information in Global Stereo Matching Approaches Michael Bleyer 1, Sylvie Chambon 2, Uta Poppe 1 and Margrit Gelautz 1 1 Vienna University of Technology,
Course Evaluations. h"p:// 4 Random Individuals will win an ATI Radeon tm HD2900XT
 Course Evaluations h"p://www.siggraph.org/courses_evalua4on 4 Random Individuals will win an ATI Radeon tm HD2900XT A Gentle Introduction to Bilateral Filtering and its Applications From Gaussian blur
Course Evaluations h"p://www.siggraph.org/courses_evalua4on 4 Random Individuals will win an ATI Radeon tm HD2900XT A Gentle Introduction to Bilateral Filtering and its Applications From Gaussian blur
IMAGE DENOISING USING NL-MEANS VIA SMOOTH PATCH ORDERING
 IMAGE DENOISING USING NL-MEANS VIA SMOOTH PATCH ORDERING Idan Ram, Michael Elad and Israel Cohen Department of Electrical Engineering Department of Computer Science Technion - Israel Institute of Technology
IMAGE DENOISING USING NL-MEANS VIA SMOOTH PATCH ORDERING Idan Ram, Michael Elad and Israel Cohen Department of Electrical Engineering Department of Computer Science Technion - Israel Institute of Technology
Computer Vision I - Algorithms and Applications: Basics of Image Processing
 Computer Vision I - Algorithms and Applications: Basics of Image Processing Carsten Rother 28/10/2013 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing
Computer Vision I - Algorithms and Applications: Basics of Image Processing Carsten Rother 28/10/2013 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing
Color Image Segmentation
 Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Computer Vision I - Basics of Image Processing Part 2
 Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Data Term. Michael Bleyer LVA Stereo Vision
 Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
A Simple Algorithm for Image Denoising Based on MS Segmentation
 A Simple Algorithm for Image Denoising Based on MS Segmentation G.Vijaya 1 Dr.V.Vasudevan 2 Senior Lecturer, Dept. of CSE, Kalasalingam University, Krishnankoil, Tamilnadu, India. Senior Prof. & Head Dept.
A Simple Algorithm for Image Denoising Based on MS Segmentation G.Vijaya 1 Dr.V.Vasudevan 2 Senior Lecturer, Dept. of CSE, Kalasalingam University, Krishnankoil, Tamilnadu, India. Senior Prof. & Head Dept.
Segmentation-Based Motion with Occlusions Using Graph-Cut Optimization
 Segmentation-Based Motion with Occlusions Using Graph-Cut Optimization Michael Bleyer, Christoph Rhemann, and Margrit Gelautz Institute for Software Technology and Interactive Systems Vienna University
Segmentation-Based Motion with Occlusions Using Graph-Cut Optimization Michael Bleyer, Christoph Rhemann, and Margrit Gelautz Institute for Software Technology and Interactive Systems Vienna University
Segmentation Based Stereo. Michael Bleyer LVA Stereo Vision
 Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
A FAST SEGMENTATION-DRIVEN ALGORITHM FOR ACCURATE STEREO CORRESPONDENCE. Stefano Mattoccia and Leonardo De-Maeztu
 A FAST SEGMENTATION-DRIVEN ALGORITHM FOR ACCURATE STEREO CORRESPONDENCE Stefano Mattoccia and Leonardo De-Maeztu University of Bologna, Public University of Navarre ABSTRACT Recent cost aggregation strategies
A FAST SEGMENTATION-DRIVEN ALGORITHM FOR ACCURATE STEREO CORRESPONDENCE Stefano Mattoccia and Leonardo De-Maeztu University of Bologna, Public University of Navarre ABSTRACT Recent cost aggregation strategies
CSSE463: Image Recognition Day 21
 CSSE463: Image Recognition Day 21 Sunset detector due. Foundations of Image Recognition completed This wee: K-means: a method of Image segmentation Questions? An image to segment Segmentation The process
CSSE463: Image Recognition Day 21 Sunset detector due. Foundations of Image Recognition completed This wee: K-means: a method of Image segmentation Questions? An image to segment Segmentation The process
Examples. Bilateral filter. Input. Soft texture is removed
 A Gentle Introduction to Bilateral Filtering and its Applications Limitation? Pierre Kornprobst (INRIA) 0:20 Examples Soft texture is removed Input Bilateral filter Examples Constant regions appear Input
A Gentle Introduction to Bilateral Filtering and its Applications Limitation? Pierre Kornprobst (INRIA) 0:20 Examples Soft texture is removed Input Bilateral filter Examples Constant regions appear Input
Computer Vision I - Basics of Image Processing Part 1
 Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
Texture Image Segmentation using FCM
 Proceedings of 2012 4th International Conference on Machine Learning and Computing IPCSIT vol. 25 (2012) (2012) IACSIT Press, Singapore Texture Image Segmentation using FCM Kanchan S. Deshmukh + M.G.M
Proceedings of 2012 4th International Conference on Machine Learning and Computing IPCSIT vol. 25 (2012) (2012) IACSIT Press, Singapore Texture Image Segmentation using FCM Kanchan S. Deshmukh + M.G.M
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling
 Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Image Processing. Filtering. Slide 1
 Image Processing Filtering Slide 1 Preliminary Image generation Original Noise Image restoration Result Slide 2 Preliminary Classic application: denoising However: Denoising is much more than a simple
Image Processing Filtering Slide 1 Preliminary Image generation Original Noise Image restoration Result Slide 2 Preliminary Classic application: denoising However: Denoising is much more than a simple
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing
 Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Title: Adaptive Region Merging Segmentation of Airborne Imagery for Roof Condition Assessment. Abstract:
 Title: Adaptive Region Merging Segmentation of Airborne Imagery for Roof Condition Assessment Abstract: In order to perform residential roof condition assessment with very-high-resolution airborne imagery,
Title: Adaptive Region Merging Segmentation of Airborne Imagery for Roof Condition Assessment Abstract: In order to perform residential roof condition assessment with very-high-resolution airborne imagery,
Basic relations between pixels (Chapter 2)
") Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Fast 3D Mean Shift Filter for CT Images
 Fast 3D Mean Shift Filter for CT Images Gustavo Fernández Domínguez, Horst Bischof, and Reinhard Beichel Institute for Computer Graphics and Vision, Graz University of Technology Inffeldgasse 16/2, A-8010,
Fast 3D Mean Shift Filter for CT Images Gustavo Fernández Domínguez, Horst Bischof, and Reinhard Beichel Institute for Computer Graphics and Vision, Graz University of Technology Inffeldgasse 16/2, A-8010,
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
COLOR image segmentation is a method of assigning
 Proceedings of the Federated Conference on Computer Science and Information Systems pp. 1049 1054 DOI: 10.15439/2015F222 ACSIS, Vol. 5 Applying fuzzy clustering method to color image segmentation Omer
Proceedings of the Federated Conference on Computer Science and Information Systems pp. 1049 1054 DOI: 10.15439/2015F222 ACSIS, Vol. 5 Applying fuzzy clustering method to color image segmentation Omer
Does Color Really Help in Dense Stereo Matching?
 Does Color Really Help in Dense Stereo Matching? Michael Bleyer 1 and Sylvie Chambon 2 1 Vienna University of Technology, Austria 2 Laboratoire Central des Ponts et Chaussées, Nantes, France Dense Stereo
Does Color Really Help in Dense Stereo Matching? Michael Bleyer 1 and Sylvie Chambon 2 1 Vienna University of Technology, Austria 2 Laboratoire Central des Ponts et Chaussées, Nantes, France Dense Stereo
Towards the completion of assignment 1
 Towards the completion of assignment 1 What to do for calibration What to do for point matching What to do for tracking What to do for GUI COMPSCI 773 Feature Point Detection Why study feature point detection?
Towards the completion of assignment 1 What to do for calibration What to do for point matching What to do for tracking What to do for GUI COMPSCI 773 Feature Point Detection Why study feature point detection?
Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains
 Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains Ahmad Ali Abin, Mehran Fotouhi, Shohreh Kasaei, Senior Member, IEEE Sharif University of Technology, Tehran, Iran abin@ce.sharif.edu,
Cellular Learning Automata-Based Color Image Segmentation using Adaptive Chains Ahmad Ali Abin, Mehran Fotouhi, Shohreh Kasaei, Senior Member, IEEE Sharif University of Technology, Tehran, Iran abin@ce.sharif.edu,
A novel heterogeneous framework for stereo matching
 A novel heterogeneous framework for stereo matching Leonardo De-Maeztu 1, Stefano Mattoccia 2, Arantxa Villanueva 1 and Rafael Cabeza 1 1 Department of Electrical and Electronic Engineering, Public University
A novel heterogeneous framework for stereo matching Leonardo De-Maeztu 1, Stefano Mattoccia 2, Arantxa Villanueva 1 and Rafael Cabeza 1 1 Department of Electrical and Electronic Engineering, Public University
Image Inpainting and Selective Motion Blur
 Image Inpainting and Selective Motion Blur Gaurav Verma Dept. of Electrical Engineering, IIT Kanpur 14244, gverma@iitk.ac.in Abstract: This report is presented as a part of the coursework for EE604A, Image
Image Inpainting and Selective Motion Blur Gaurav Verma Dept. of Electrical Engineering, IIT Kanpur 14244, gverma@iitk.ac.in Abstract: This report is presented as a part of the coursework for EE604A, Image
Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation
 Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation Alaa E. Abdel-Hakim Electrical Engineering Department Assiut University Assiut, Egypt alaa.aly@eng.au.edu.eg Mostafa Izz Cairo
Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation Alaa E. Abdel-Hakim Electrical Engineering Department Assiut University Assiut, Egypt alaa.aly@eng.au.edu.eg Mostafa Izz Cairo
Robust Shape Retrieval Using Maximum Likelihood Theory
 Robust Shape Retrieval Using Maximum Likelihood Theory Naif Alajlan 1, Paul Fieguth 2, and Mohamed Kamel 1 1 PAMI Lab, E & CE Dept., UW, Waterloo, ON, N2L 3G1, Canada. naif, mkamel@pami.uwaterloo.ca 2
Robust Shape Retrieval Using Maximum Likelihood Theory Naif Alajlan 1, Paul Fieguth 2, and Mohamed Kamel 1 1 PAMI Lab, E & CE Dept., UW, Waterloo, ON, N2L 3G1, Canada. naif, mkamel@pami.uwaterloo.ca 2
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
Image Processing. BITS Pilani. Dr Jagadish Nayak. Dubai Campus
 Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
IMPROVED RHOMBUS INTERPOLATION FOR REVERSIBLE WATERMARKING BY DIFFERENCE EXPANSION. Catalin Dragoi, Dinu Coltuc
 0th European Signal Processing Conference (EUSIPCO 01) Bucharest, Romania, August 7-31, 01 IMPROVED RHOMBUS INTERPOLATION FOR REVERSIBLE WATERMARKING BY DIFFERENCE EXPANSION Catalin Dragoi, Dinu Coltuc
0th European Signal Processing Conference (EUSIPCO 01) Bucharest, Romania, August 7-31, 01 IMPROVED RHOMBUS INTERPOLATION FOR REVERSIBLE WATERMARKING BY DIFFERENCE EXPANSION Catalin Dragoi, Dinu Coltuc
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
MRT based Adaptive Transform Coder with Classified Vector Quantization (MATC-CVQ)
") 5 MRT based Adaptive Transform Coder with Classified Vector Quantization (MATC-CVQ) Contents 5.1 Introduction.128 5.2 Vector Quantization in MRT Domain Using Isometric Transformations and Scaling.130 5.2.1
5 MRT based Adaptive Transform Coder with Classified Vector Quantization (MATC-CVQ) Contents 5.1 Introduction.128 5.2 Vector Quantization in MRT Domain Using Isometric Transformations and Scaling.130 5.2.1
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
Quaternion-based color difference measure for removing impulse noise in color images
 2014 International Conference on Informative and Cybernetics for Computational Social Systems (ICCSS) Quaternion-based color difference measure for removing impulse noise in color images Lunbo Chen, Yicong
2014 International Conference on Informative and Cybernetics for Computational Social Systems (ICCSS) Quaternion-based color difference measure for removing impulse noise in color images Lunbo Chen, Yicong
Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing
 Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai,
Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai,
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS
 CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
Stereo Vision II: Dense Stereo Matching
 Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
A Benchmark for Interactive Image Segmentation Algorithms
 A Benchmark for Interactive Image Segmentation Algorithms Yibiao Zhao 1,3, Xiaohan Nie 2,3, Yanbiao Duan 2,3, Yaping Huang 1, Siwei Luo 1 1 Beijing Jiaotong University, 2 Beijing Institute of Technology,
A Benchmark for Interactive Image Segmentation Algorithms Yibiao Zhao 1,3, Xiaohan Nie 2,3, Yanbiao Duan 2,3, Yaping Huang 1, Siwei Luo 1 1 Beijing Jiaotong University, 2 Beijing Institute of Technology,
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
Digital Image Processing. Prof. P.K. Biswas. Department of Electronics & Electrical Communication Engineering
 Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Shadow detection and removal from a single image
 Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
Hom o om o or o phi p c Processing
 Homomorphic o o Processing Motivation: Image with a large dynamic range, e.g. natural scene on a bright sunny day, recorded on a medium with a small dynamic range, e.g. a film image contrast significantly
Homomorphic o o Processing Motivation: Image with a large dynamic range, e.g. natural scene on a bright sunny day, recorded on a medium with a small dynamic range, e.g. a film image contrast significantly
Digital Image Processing
 Digital Image Processing Lecture # 6 Image Enhancement in Spatial Domain- II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Local/
Digital Image Processing Lecture # 6 Image Enhancement in Spatial Domain- II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Local/
Shape Preserving RGB-D Depth Map Restoration
 Shape Preserving RGB-D Depth Map Restoration Wei Liu 1, Haoyang Xue 1, Yun Gu 1, Qiang Wu 2, Jie Yang 1, and Nikola Kasabov 3 1 The Key Laboratory of Ministry of Education for System Control and Information
Shape Preserving RGB-D Depth Map Restoration Wei Liu 1, Haoyang Xue 1, Yun Gu 1, Qiang Wu 2, Jie Yang 1, and Nikola Kasabov 3 1 The Key Laboratory of Ministry of Education for System Control and Information
Using the Kolmogorov-Smirnov Test for Image Segmentation
 Using the Kolmogorov-Smirnov Test for Image Segmentation Yong Jae Lee CS395T Computational Statistics Final Project Report May 6th, 2009 I. INTRODUCTION Image segmentation is a fundamental task in computer
Using the Kolmogorov-Smirnov Test for Image Segmentation Yong Jae Lee CS395T Computational Statistics Final Project Report May 6th, 2009 I. INTRODUCTION Image segmentation is a fundamental task in computer
Image Compression With Haar Discrete Wavelet Transform
 Image Compression With Haar Discrete Wavelet Transform Cory Cox ME 535: Computational Techniques in Mech. Eng. Figure 1 : An example of the 2D discrete wavelet transform that is used in JPEG2000. Source:
Image Compression With Haar Discrete Wavelet Transform Cory Cox ME 535: Computational Techniques in Mech. Eng. Figure 1 : An example of the 2D discrete wavelet transform that is used in JPEG2000. Source:
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
[2006] IEEE. Reprinted, with permission, from [Wenjing Jia, Huaifeng Zhang, Xiangjian He, and Qiang Wu, A Comparison on Histogram Based Image
![[2006] IEEE. Reprinted, with permission, from [Wenjing Jia, Huaifeng Zhang, Xiangjian He, and Qiang Wu, A Comparison on Histogram Based Image](/thumbs/95/124863186.jpg "[2006] IEEE. Reprinted, with permission, from [Wenjing Jia, Huaifeng Zhang, Xiangjian He, and Qiang Wu, A Comparison on Histogram Based Image") [6] IEEE. Reprinted, with permission, from [Wenjing Jia, Huaifeng Zhang, Xiangjian He, and Qiang Wu, A Comparison on Histogram Based Image Matching Methods, Video and Signal Based Surveillance, 6. AVSS
[6] IEEE. Reprinted, with permission, from [Wenjing Jia, Huaifeng Zhang, Xiangjian He, and Qiang Wu, A Comparison on Histogram Based Image Matching Methods, Video and Signal Based Surveillance, 6. AVSS
Color-Texture Segmentation of Medical Images Based on Local Contrast Information
 Color-Texture Segmentation of Medical Images Based on Local Contrast Information Yu-Chou Chang Department of ECEn, Brigham Young University, Provo, Utah, 84602 USA ycchang@et.byu.edu Dah-Jye Lee Department
Color-Texture Segmentation of Medical Images Based on Local Contrast Information Yu-Chou Chang Department of ECEn, Brigham Young University, Provo, Utah, 84602 USA ycchang@et.byu.edu Dah-Jye Lee Department
Noise filtering for television receivers with reduced memory
 Noise filtering for television receivers with reduced memory R. J. Schutten, G. de Haan and A. H. M. van Roermund. Philips Research Laboratories, Television Systems Group, Prof. Holstlaan 4, 5656 AA Eindhoven,
Noise filtering for television receivers with reduced memory R. J. Schutten, G. de Haan and A. H. M. van Roermund. Philips Research Laboratories, Television Systems Group, Prof. Holstlaan 4, 5656 AA Eindhoven,
PatchMatch Stereo - Stereo Matching with Slanted Support Windows
 M. BLEYER, C. RHEMANN, C. ROTHER: PATCHMATCH STEREO 1 PatchMatch Stereo - Stereo Matching with Slanted Support Windows Michael Bleyer 1 bleyer@ims.tuwien.ac.at Christoph Rhemann 1 rhemann@ims.tuwien.ac.at
M. BLEYER, C. RHEMANN, C. ROTHER: PATCHMATCH STEREO 1 PatchMatch Stereo - Stereo Matching with Slanted Support Windows Michael Bleyer 1 bleyer@ims.tuwien.ac.at Christoph Rhemann 1 rhemann@ims.tuwien.ac.at
Lecture: k-means & mean-shift clustering
 Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 Recap: Image Segmentation Goal: identify groups of pixels that go together 2 Recap: Gestalt
Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 Recap: Image Segmentation Goal: identify groups of pixels that go together 2 Recap: Gestalt
Probabilistic Correspondence Matching using Random Walk with Restart
 C. OH, B. HAM, K. SOHN: PROBABILISTIC CORRESPONDENCE MATCHING 1 Probabilistic Correspondence Matching using Random Walk with Restart Changjae Oh ocj1211@yonsei.ac.kr Bumsub Ham mimo@yonsei.ac.kr Kwanghoon
C. OH, B. HAM, K. SOHN: PROBABILISTIC CORRESPONDENCE MATCHING 1 Probabilistic Correspondence Matching using Random Walk with Restart Changjae Oh ocj1211@yonsei.ac.kr Bumsub Ham mimo@yonsei.ac.kr Kwanghoon
Image Enhancement Techniques for Fingerprint Identification
 March 2013 1 Image Enhancement Techniques for Fingerprint Identification Pankaj Deshmukh, Siraj Pathan, Riyaz Pathan Abstract The aim of this paper is to propose a new method in fingerprint enhancement
March 2013 1 Image Enhancement Techniques for Fingerprint Identification Pankaj Deshmukh, Siraj Pathan, Riyaz Pathan Abstract The aim of this paper is to propose a new method in fingerprint enhancement
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Supplementary Material for ECCV 2012 Paper: Extracting 3D Scene-consistent Object Proposals and Depth from Stereo Images
 Supplementary Material for ECCV 2012 Paper: Extracting 3D Scene-consistent Object Proposals and Depth from Stereo Images Michael Bleyer 1, Christoph Rhemann 1,2, and Carsten Rother 2 1 Vienna University
Supplementary Material for ECCV 2012 Paper: Extracting 3D Scene-consistent Object Proposals and Depth from Stereo Images Michael Bleyer 1, Christoph Rhemann 1,2, and Carsten Rother 2 1 Vienna University
Medical images, segmentation and analysis
 Medical images, segmentation and analysis ImageLab group http://imagelab.ing.unimo.it Università degli Studi di Modena e Reggio Emilia Medical Images Macroscopic Dermoscopic ELM enhance the features of
Medical images, segmentation and analysis ImageLab group http://imagelab.ing.unimo.it Università degli Studi di Modena e Reggio Emilia Medical Images Macroscopic Dermoscopic ELM enhance the features of
Chapter - 2 : IMAGE ENHANCEMENT
 Chapter - : IMAGE ENHANCEMENT The principal objective of enhancement technique is to process a given image so that the result is more suitable than the original image for a specific application Image Enhancement
Chapter - : IMAGE ENHANCEMENT The principal objective of enhancement technique is to process a given image so that the result is more suitable than the original image for a specific application Image Enhancement
Color Image Segmentation Using a Spatial K-Means Clustering Algorithm
 Color Image Segmentation Using a Spatial K-Means Clustering Algorithm Dana Elena Ilea and Paul F. Whelan Vision Systems Group School of Electronic Engineering Dublin City University Dublin 9, Ireland danailea@eeng.dcu.ie
Color Image Segmentation Using a Spatial K-Means Clustering Algorithm Dana Elena Ilea and Paul F. Whelan Vision Systems Group School of Electronic Engineering Dublin City University Dublin 9, Ireland danailea@eeng.dcu.ie
An Effective Denoising Method for Images Contaminated with Mixed Noise Based on Adaptive Median Filtering and Wavelet Threshold Denoising
 J Inf Process Syst, Vol.14, No.2, pp.539~551, April 2018 https://doi.org/10.3745/jips.02.0083 ISSN 1976-913X (Print) ISSN 2092-805X (Electronic) An Effective Denoising Method for Images Contaminated with
J Inf Process Syst, Vol.14, No.2, pp.539~551, April 2018 https://doi.org/10.3745/jips.02.0083 ISSN 1976-913X (Print) ISSN 2092-805X (Electronic) An Effective Denoising Method for Images Contaminated with
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT
 CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
EXPERIMENTAL RESULTS ON THE DETERMINATION OF THE TRIFOCAL TENSOR USING NEARLY COPLANAR POINT CORRESPONDENCES
 EXPERIMENTAL RESULTS ON THE DETERMINATION OF THE TRIFOCAL TENSOR USING NEARLY COPLANAR POINT CORRESPONDENCES Camillo RESSL Institute of Photogrammetry and Remote Sensing University of Technology, Vienna,
EXPERIMENTAL RESULTS ON THE DETERMINATION OF THE TRIFOCAL TENSOR USING NEARLY COPLANAR POINT CORRESPONDENCES Camillo RESSL Institute of Photogrammetry and Remote Sensing University of Technology, Vienna,
Recognition of Object Contours from Stereo Images: an Edge Combination Approach
 Recognition of Object Contours from Stereo Images: an Edge Combination Approach Margrit Gelautz and Danijela Markovic Institute for Software Technology and Interactive Systems, Vienna University of Technology
Recognition of Object Contours from Stereo Images: an Edge Combination Approach Margrit Gelautz and Danijela Markovic Institute for Software Technology and Interactive Systems, Vienna University of Technology
Denoising Method for Removal of Impulse Noise Present in Images
 ISSN 2278 0211 (Online) Denoising Method for Removal of Impulse Noise Present in Images D. Devasena AP (Sr.G), Sri Ramakrishna Engineering College, Coimbatore, Tamil Nadu, India A.Yuvaraj Student, Sri
ISSN 2278 0211 (Online) Denoising Method for Removal of Impulse Noise Present in Images D. Devasena AP (Sr.G), Sri Ramakrishna Engineering College, Coimbatore, Tamil Nadu, India A.Yuvaraj Student, Sri
EECS490: Digital Image Processing. Lecture #19
 Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Object-Based Classification & ecognition. Zutao Ouyang 11/17/2015
 Object-Based Classification & ecognition Zutao Ouyang 11/17/2015 What is Object-Based Classification The object based image analysis approach delineates segments of homogeneous image areas (i.e., objects)
Object-Based Classification & ecognition Zutao Ouyang 11/17/2015 What is Object-Based Classification The object based image analysis approach delineates segments of homogeneous image areas (i.e., objects)
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing ERRATA. Wilhelm Burger Mark J. Burge. An algorithmic introduction using Java. Second Edition. Springer
 Wilhelm Burger Mark J. Burge Digital Image Processing An algorithmic introduction using Java Second Edition ERRATA Springer Berlin Heidelberg NewYork Hong Kong London Milano Paris Tokyo 12.1 RGB Color
Wilhelm Burger Mark J. Burge Digital Image Processing An algorithmic introduction using Java Second Edition ERRATA Springer Berlin Heidelberg NewYork Hong Kong London Milano Paris Tokyo 12.1 RGB Color
Generalized Tree-Based Wavelet Transform and Applications to Patch-Based Image Processing
 Generalized Tree-Based Wavelet Transform and * Michael Elad The Computer Science Department The Technion Israel Institute of technology Haifa 32000, Israel *Joint work with A Seminar in the Hebrew University
Generalized Tree-Based Wavelet Transform and * Michael Elad The Computer Science Department The Technion Israel Institute of technology Haifa 32000, Israel *Joint work with A Seminar in the Hebrew University
CS 5540 Spring 2013 Assignment 3, v1.0 Due: Apr. 24th 11:59PM
 1 Introduction In this programming project, we are going to do a simple image segmentation task. Given a grayscale image with a bright object against a dark background and we are going to do a binary decision
1 Introduction In this programming project, we are going to do a simple image segmentation task. Given a grayscale image with a bright object against a dark background and we are going to do a binary decision
A New Technique of Extraction of Edge Detection Using Digital Image Processing
 International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) A New Technique of Extraction of Edge Detection Using Digital Image Processing Balaji S.C.K 1 1, Asst Professor S.V.I.T Abstract:
International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) A New Technique of Extraction of Edge Detection Using Digital Image Processing Balaji S.C.K 1 1, Asst Professor S.V.I.T Abstract:
Digital Image Processing. Prof. P. K. Biswas. Department of Electronic & Electrical Communication Engineering
 Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Title. Author(s)Smolka, Bogdan. Issue Date Doc URL. Type. Note. File Information. Ranked-Based Vector Median Filter
Smolka, Bogdan. Issue Date Doc URL. Type. Note. File Information. Ranked-Based Vector Median Filter") Title Ranked-Based Vector Median Filter Author(s)Smolka, Bogdan Proceedings : APSIPA ASC 2009 : Asia-Pacific Signal Citationand Conference: 254-257 Issue Date 2009-10-04 Doc URL http://hdl.handle.net/2115/39685
Title Ranked-Based Vector Median Filter Author(s)Smolka, Bogdan Proceedings : APSIPA ASC 2009 : Asia-Pacific Signal Citationand Conference: 254-257 Issue Date 2009-10-04 Doc URL http://hdl.handle.net/2115/39685
Vivekananda. Collegee of Engineering & Technology. Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT.
 Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
FPGA Implementation of a Nonlinear Two Dimensional Fuzzy Filter
 Justin G. R. Delva, Ali M. Reza, and Robert D. Turney + + CORE Solutions Group, Xilinx San Jose, CA 9514-3450, USA Department of Electrical Engineering and Computer Science, UWM Milwaukee, Wisconsin 5301-0784,
Justin G. R. Delva, Ali M. Reza, and Robert D. Turney + + CORE Solutions Group, Xilinx San Jose, CA 9514-3450, USA Department of Electrical Engineering and Computer Science, UWM Milwaukee, Wisconsin 5301-0784,
Segment-Tree based Cost Aggregation for Stereo Matching
 Segment-Tree based Cost Aggregation for Stereo Matching Xing Mei 1, Xun Sun 2, Weiming Dong 1, Haitao Wang 2, Xiaopeng Zhang 1 1 NLPR, Institute of Automation, Chinese Academy of Sciences, Beijing, China
Segment-Tree based Cost Aggregation for Stereo Matching Xing Mei 1, Xun Sun 2, Weiming Dong 1, Haitao Wang 2, Xiaopeng Zhang 1 1 NLPR, Institute of Automation, Chinese Academy of Sciences, Beijing, China
Lecture: k-means & mean-shift clustering
 Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab Lecture 11-1 Recap: Image Segmentation Goal: identify groups of pixels that go together
Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab Lecture 11-1 Recap: Image Segmentation Goal: identify groups of pixels that go together
Segmentation of MR Images of a Beating Heart
 Segmentation of MR Images of a Beating Heart Avinash Ravichandran Abstract Heart Arrhythmia is currently treated using invasive procedures. In order use to non invasive procedures accurate imaging modalities
Segmentation of MR Images of a Beating Heart Avinash Ravichandran Abstract Heart Arrhythmia is currently treated using invasive procedures. In order use to non invasive procedures accurate imaging modalities
A Feature Point Matching Based Approach for Video Objects Segmentation
 A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
Panoramic Image Stitching
 Mcgill University Panoramic Image Stitching by Kai Wang Pengbo Li A report submitted in fulfillment for the COMP 558 Final project in the Faculty of Computer Science April 2013 Mcgill University Abstract
Mcgill University Panoramic Image Stitching by Kai Wang Pengbo Li A report submitted in fulfillment for the COMP 558 Final project in the Faculty of Computer Science April 2013 Mcgill University Abstract
A reversible data hiding based on adaptive prediction technique and histogram shifting
 A reversible data hiding based on adaptive prediction technique and histogram shifting Rui Liu, Rongrong Ni, Yao Zhao Institute of Information Science Beijing Jiaotong University E-mail: rrni@bjtu.edu.cn
A reversible data hiding based on adaptive prediction technique and histogram shifting Rui Liu, Rongrong Ni, Yao Zhao Institute of Information Science Beijing Jiaotong University E-mail: rrni@bjtu.edu.cn
Interactive segmentation, Combinatorial optimization. Filip Malmberg
 Interactive segmentation, Combinatorial optimization Filip Malmberg But first... Implementing graph-based algorithms Even if we have formulated an algorithm on a general graphs, we do not neccesarily have
Interactive segmentation, Combinatorial optimization Filip Malmberg But first... Implementing graph-based algorithms Even if we have formulated an algorithm on a general graphs, we do not neccesarily have
Logical Templates for Feature Extraction in Fingerprint Images
 Logical Templates for Feature Extraction in Fingerprint Images Bir Bhanu, Michael Boshra and Xuejun Tan Center for Research in Intelligent Systems University of Califomia, Riverside, CA 9252 1, USA Email:
Logical Templates for Feature Extraction in Fingerprint Images Bir Bhanu, Michael Boshra and Xuejun Tan Center for Research in Intelligent Systems University of Califomia, Riverside, CA 9252 1, USA Email:
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Improved Non-Local Means Algorithm Based on Dimensionality Reduction
 Improved Non-Local Means Algorithm Based on Dimensionality Reduction Golam M. Maruf and Mahmoud R. El-Sakka (&) Department of Computer Science, University of Western Ontario, London, Ontario, Canada {gmaruf,melsakka}@uwo.ca
Improved Non-Local Means Algorithm Based on Dimensionality Reduction Golam M. Maruf and Mahmoud R. El-Sakka (&) Department of Computer Science, University of Western Ontario, London, Ontario, Canada {gmaruf,melsakka}@uwo.ca
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN
 CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
CHAPTER 3 IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN CHAPTER 3: IMAGE ENHANCEMENT IN THE SPATIAL DOMAIN Principal objective: to process an image so that the result is more suitable than the original image
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
Image Inpainting Using Sparsity of the Transform Domain
 Image Inpainting Using Sparsity of the Transform Domain H. Hosseini*, N.B. Marvasti, Student Member, IEEE, F. Marvasti, Senior Member, IEEE Advanced Communication Research Institute (ACRI) Department of
Image Inpainting Using Sparsity of the Transform Domain H. Hosseini*, N.B. Marvasti, Student Member, IEEE, F. Marvasti, Senior Member, IEEE Advanced Communication Research Institute (ACRI) Department of
SYDE Winter 2011 Introduction to Pattern Recognition. Clustering
 SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
Fuzzy Inference System based Edge Detection in Images
 Fuzzy Inference System based Edge Detection in Images Anjali Datyal 1 and Satnam Singh 2 1 M.Tech Scholar, ECE Department, SSCET, Badhani, Punjab, India 2 AP, ECE Department, SSCET, Badhani, Punjab, India
Fuzzy Inference System based Edge Detection in Images Anjali Datyal 1 and Satnam Singh 2 1 M.Tech Scholar, ECE Department, SSCET, Badhani, Punjab, India 2 AP, ECE Department, SSCET, Badhani, Punjab, India
GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES
 GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES Karl W. Ulmer and John P. Basart Center for Nondestructive Evaluation Department of Electrical and Computer Engineering Iowa State University
GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES Karl W. Ulmer and John P. Basart Center for Nondestructive Evaluation Department of Electrical and Computer Engineering Iowa State University