Content. Coordinate systems Orthographic projection. (Engineering Drawings)
|
|
|
- Melissa Rich
- 5 years ago
- Views:
Transcription



1 Projection Views
2 Content Coordinate systems Orthographic projection (Engineering Drawings)
3 Graphical Coordinator Systems A coordinate system is needed to input, store and display model geometry and graphics. Four different types of coordinate systems are used in a CAD system at different stages of geometric modeling and for different tasks.
4 Model (or World, Database) Coordinator System The reference space of fthe model with respect tto which hall of the geometrical data is stored. It is a Cartesian system which forms the default coordinate system used by a software system. z y Y X x Z
5 Viewing Coordinate System View Plane Textbook setup - for Parallel l Projection, the viewer is at infinity. Zv Yv Xv View Window Viewing Direction Viewer AutoCAD Default Setup Z Y X Viewer
6 Viewing Coordinate System (VCS) A 3-D Cartesian coordinate system (right hand of left hand) in which a projection of the modeled object is formed. VSC will be discussed in detail under Perspective or Parallel Projections. Viewing Coor. System Model Coor Sys
7 P
8
9
10
11
12
13
14 Viewer Viewer
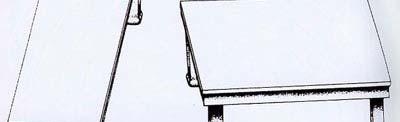
15 Parallel Projection Preserve actual dimensions and shapes of objects Preserve parallelism Angles preserved only on faces parallel to the projection plane Orthographic projection is one type of parallel projection
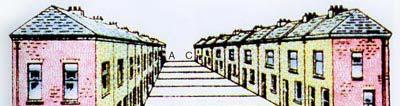
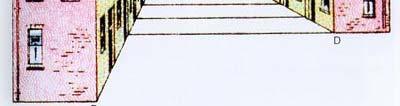
16 Perspective Projection Doesn t preserve parallelism Doesn t preserve actual dimensions and angles of objects, therefore shapes deformed Popular in art (classic painting); architectural design and civil engineering. Not commonly used in mechanical engineering
17
18 Geometric Transformations for Generating Projection View Set Up the Viewing Coordinate System (VCS) i) Define the view reference point P = ( P x, P y, P z ) T v ii) Define the line of the sight vector n (normalized) v n = ( N x, N y, N z ) T and N 2 x + N 2 y + N 2 z =1 iii) Define the "up" direction v T V = V x, V y, V z n, V v n v = 0 r u, V v, v n ( ) T v This also defines an orthogonal vector, ( ) forms the viewing coordinates Define the View Window in u v n coordinates v u = V v v n
19 Generating Parallel Projection Problem: for a given computer model, we know its x-y-z coordinates in MCS; and we need to find its u-v-n coordinates in VCS and X s -Y s in WCS. Getting the u-v-n coordinates of the objects by transforming the objects and u-v-n coordinate system together to fully align u-v-n with x-y-z axes, then drop the n (the depth) component to get Xs and Ys Viewing Coor. System Model Coor Sys - Translate O v to O. - Align the n axis with the Z axis. - Fully aligning u-v-n with x-y-z
20 Generating Parallel Projection (1) First transform coordinates of objects into the u-v-n coordinates (VCS), then drop the n component. (n is the depth) i.e. Overlapping u - v n with x -y -z i) Translate O v to O. ) v v n ii) Align the axis with the Z axis. The procedure is identical to the transformations used to prepare for the rotation about an axis. A = N x, B = N y, C = N z L = N x 2 + Ny 2 + Nz 2 y V = N y 2 + Nz 2 [ D] = vx vy vz
![Generating Parallel Projection (2) θ 1 2 Rotating about X: [R] x ; and Rotating about Y: [R] y θ](/docs-images/86/94783139/images/21-2.jpg "Fully aligning u-v-n with x-y-z Then, rotate Ө 3 about the Z axis to align ū with X and v with Y")
21 Generating Parallel Projection (2) θ 1 2 Rotating about X: [R] x ; and Rotating about Y: [R] y θ Fully aligning u-v-n with x-y-z Then, rotate Ө 3 about the Z axis to align ū with X and v with Y
22 Generating Parallel Projection (3) Rotate Ө 3 about the Z axis to align ū with X and v with Y At this point, is given by V x, V y, 0 where V V x V y = R y 0 1 [ ] R x [ ][ Do v,o] ( ) T V x V y V z 1 We need to rotate by an angle Ө 3 about the Z axis L = V x 2 + V y 2, sinθ 3 = V x L, cosθ 3 = V y L [ R z ]= V r L V x L 0 0 V xl V yl Result:
23 Generating Parallel Projection (4) Drop the n coordinate [ ]=] D n , u V = D n 0 1 u V 1 [ ] n In summary, to project a view of an object on the UV plane, one needs to transform each point on the object by: [ T ] = [ Dn ][ Rz][ Ry] [ Rx ][ Do, o] v u V P = 0 1 = [ T ]P = T [ ] x y z 1 Note: The inverse transforms are not needed! We don't want to go back to x - y - z coordinates.
 coincides with one of the MCS")
24 Oth Orthographic hi Projection Y Top Front Right X Z Projection planes (Viewing planes) are perpendicular to the principal axes of the MCS of the model The projection direction (viewing direction) coincides with one of the MCS axes
25 Y Top Front Right X Geometric Transformations for Generating Orthographic Projection (Front View) Z Yv,Y Front Pv = P Xv, X Drop Z
26 Y Top Front Right Yv Geometric Transformations for Generating Orthographic Projection (Top View) X Top Xv, X Z Z cos(90) sin( ) P v = P = P sin( 90 ) cos(90) Drop Z 90 [ R] x
27 Y Top Front Right X Yv, Y Geometric Transformations for Generating Oth Orthographic hi Projection (Right View) Right Z Xv Z 1000 cos( 90 ) 0 sin( 90 ) P = = v P P sin ( 90 ) 0 cos( 90 ) Drop Z 90 [ R] y
28 Rotations Needed for Generating Isometric Projection Y Top Front Right Y Yv Top X Front Right Xv Z Z Zv X cosθ 0 sinθ 0 0cos sin P [ ] [ ] v = R φ x R θ yp= φ φ P 0 sinφ cosφ 0 sinθ 0 cosθ
29 Isometric Projection: Equally foreshorten the three main axes θ = ± 45, φ = ±
30 Other Possible Rotation Paths Rx --> Ry Rz --> Ry(Rx) Rx(Ry) --> Rz r x = ± 45, ry = ± r z = ± 45, r y( ( x ) = ± ry ( x) = ± 45, rz = ANY ANGLE
Projection Lecture Series
 Projection 25.353 Lecture Series Prof. Gary Wang Department of Mechanical and Manufacturing Engineering The University of Manitoba Overview Coordinate Systems Local Coordinate System (LCS) World Coordinate
Projection 25.353 Lecture Series Prof. Gary Wang Department of Mechanical and Manufacturing Engineering The University of Manitoba Overview Coordinate Systems Local Coordinate System (LCS) World Coordinate
MAE : Lecture #12 - Projection and Perspective. Lecture Overview:
 Lecture Overview: Miscellaneous Motivation Projection - basics Means for projecting images: Orthographic viewing - basics Perspective viewing - basics The mathematics of projection Vanishing points Numerical
Lecture Overview: Miscellaneous Motivation Projection - basics Means for projecting images: Orthographic viewing - basics Perspective viewing - basics The mathematics of projection Vanishing points Numerical
CITSTUDENTS.IN VIEWING. Computer Graphics and Visualization. Classical and computer viewing. Viewing with a computer. Positioning of the camera
 UNIT - 6 7 hrs VIEWING Classical and computer viewing Viewing with a computer Positioning of the camera Simple projections Projections in OpenGL Hiddensurface removal Interactive mesh displays Parallelprojection
UNIT - 6 7 hrs VIEWING Classical and computer viewing Viewing with a computer Positioning of the camera Simple projections Projections in OpenGL Hiddensurface removal Interactive mesh displays Parallelprojection
Chapter 8 Three-Dimensional Viewing Operations
 Projections Chapter 8 Three-Dimensional Viewing Operations Figure 8.1 Classification of planar geometric projections Figure 8.2 Planar projection Figure 8.3 Parallel-oblique projection Figure 8.4 Orthographic
Projections Chapter 8 Three-Dimensional Viewing Operations Figure 8.1 Classification of planar geometric projections Figure 8.2 Planar projection Figure 8.3 Parallel-oblique projection Figure 8.4 Orthographic
3D Viewing. CMPT 361 Introduction to Computer Graphics Torsten Möller. Machiraju/Zhang/Möller
 3D Viewing CMPT 361 Introduction to Computer Graphics Torsten Möller Reading Chapter 4 of Angel Chapter 6 of Foley, van Dam, 2 Objectives What kind of camera we use? (pinhole) What projections make sense
3D Viewing CMPT 361 Introduction to Computer Graphics Torsten Möller Reading Chapter 4 of Angel Chapter 6 of Foley, van Dam, 2 Objectives What kind of camera we use? (pinhole) What projections make sense
3D Viewing. Introduction to Computer Graphics Torsten Möller. Machiraju/Zhang/Möller
 3D Viewing Introduction to Computer Graphics Torsten Möller Machiraju/Zhang/Möller Reading Chapter 4 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller 2 Objectives
3D Viewing Introduction to Computer Graphics Torsten Möller Machiraju/Zhang/Möller Reading Chapter 4 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller 2 Objectives
Computer Science 426 Midterm 3/11/04, 1:30PM-2:50PM
 NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
Introduction to Computer Graphics 4. Viewing in 3D
 Introduction to Computer Graphics 4. Viewing in 3D National Chiao Tung Univ, Taiwan By: I-Chen Lin, Assistant Professor Textbook: E.Angel, Interactive Computer Graphics, 5 th Ed., Addison Wesley Ref: Hearn
Introduction to Computer Graphics 4. Viewing in 3D National Chiao Tung Univ, Taiwan By: I-Chen Lin, Assistant Professor Textbook: E.Angel, Interactive Computer Graphics, 5 th Ed., Addison Wesley Ref: Hearn
2D Image Transforms Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") 2D Image Transforms 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Extract features from an image what do we do next? Feature matching (object recognition, 3D reconstruction, augmented
2D Image Transforms 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Extract features from an image what do we do next? Feature matching (object recognition, 3D reconstruction, augmented
Coordinate transformations. 5554: Packet 8 1
 Coordinate transformations 5554: Packet 8 1 Overview Rigid transformations are the simplest Translation, rotation Preserve sizes and angles Affine transformation is the most general linear case Homogeneous
Coordinate transformations 5554: Packet 8 1 Overview Rigid transformations are the simplest Translation, rotation Preserve sizes and angles Affine transformation is the most general linear case Homogeneous
MATHEMATICS FOR ENGINEERING TUTORIAL 5 COORDINATE SYSTEMS
 MATHEMATICS FOR ENGINEERING TUTORIAL 5 COORDINATE SYSTEMS This tutorial is essential pre-requisite material for anyone studying mechanical engineering. This tutorial uses the principle of learning by example.
MATHEMATICS FOR ENGINEERING TUTORIAL 5 COORDINATE SYSTEMS This tutorial is essential pre-requisite material for anyone studying mechanical engineering. This tutorial uses the principle of learning by example.
Transformations in Ray Tracing. MIT EECS 6.837, Durand and Cutler
 Transformations in Ray Tracing Linear Algebra Review Session Tonight! 7:30 9 PM Last Time: Simple Transformations Classes of Transformations Representation homogeneous coordinates Composition not commutative
Transformations in Ray Tracing Linear Algebra Review Session Tonight! 7:30 9 PM Last Time: Simple Transformations Classes of Transformations Representation homogeneous coordinates Composition not commutative
Specifying Complex Scenes
 Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
So we have been talking about 3D viewing, the transformations pertaining to 3D viewing. Today we will continue on it. (Refer Slide Time: 1:15)
") Introduction to Computer Graphics Dr. Prem Kalra Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture - 8 3D Viewing So we have been talking about 3D viewing, the
Introduction to Computer Graphics Dr. Prem Kalra Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture - 8 3D Viewing So we have been talking about 3D viewing, the
Viewing with Computers (OpenGL)
") We can now return to three-dimension?', graphics from a computer perspective. Because viewing in computer graphics is based on the synthetic-camera model, we should be able to construct any of the classical
We can now return to three-dimension?', graphics from a computer perspective. Because viewing in computer graphics is based on the synthetic-camera model, we should be able to construct any of the classical
3D Polygon Rendering. Many applications use rendering of 3D polygons with direct illumination
 Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
+ i a y )( cosφ + isinφ) ( ) + i( a x. cosφ a y. = a x
( cosφ + isinφ) ( ) + i( a x. cosφ a y. = a x") Rotation Matrices and Rotated Coordinate Systems Robert Bernecky April, 2018 Rotated Coordinate Systems is a confusing topic, and there is no one standard or approach 1. The following provides a simplified
Rotation Matrices and Rotated Coordinate Systems Robert Bernecky April, 2018 Rotated Coordinate Systems is a confusing topic, and there is no one standard or approach 1. The following provides a simplified
Computer Graphics Viewing
 Computer Graphics Viewing What Are Projections? Our 3-D scenes are all specified in 3-D world coordinates To display these we need to generate a 2-D image - project objects onto a picture plane Picture
Computer Graphics Viewing What Are Projections? Our 3-D scenes are all specified in 3-D world coordinates To display these we need to generate a 2-D image - project objects onto a picture plane Picture
Computer Graphics Geometric Transformations
 Computer Graphics 2016 6. Geometric Transformations Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2016-10-31 Contents Transformations Homogeneous Co-ordinates Matrix Representations of Transformations
Computer Graphics 2016 6. Geometric Transformations Hongxin Zhang State Key Lab of CAD&CG, Zhejiang University 2016-10-31 Contents Transformations Homogeneous Co-ordinates Matrix Representations of Transformations
3D Viewing. With acknowledge to: Ed Angel. Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico
 3D Viewing With acknowledge to: Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico 1 Classical Viewing Viewing plane projectors Classical
3D Viewing With acknowledge to: Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico 1 Classical Viewing Viewing plane projectors Classical
ME-430 Introduction to CAD Lecture Notes- Part 3
 ME-43 Introduction to CAD Lecture Notes- Part 3 Dr. Rajesh N. Dave Office: 36 MEC (only during office hours); 28 YCEES Phone: 973 596-586 e-mail: dave@adm.njit.edu Web Page: web.njit.edu/~rdave Office
ME-43 Introduction to CAD Lecture Notes- Part 3 Dr. Rajesh N. Dave Office: 36 MEC (only during office hours); 28 YCEES Phone: 973 596-586 e-mail: dave@adm.njit.edu Web Page: web.njit.edu/~rdave Office
COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective
 COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective Department of Computing and Information Systems The Lecture outline Introduction Rotation about artibrary axis
COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective Department of Computing and Information Systems The Lecture outline Introduction Rotation about artibrary axis
2D and 3D Coordinate Systems and Transformations
 Graphics & Visualization Chapter 3 2D and 3D Coordinate Systems and Transformations Graphics & Visualization: Principles & Algorithms Introduction In computer graphics is often necessary to change: the
Graphics & Visualization Chapter 3 2D and 3D Coordinate Systems and Transformations Graphics & Visualization: Principles & Algorithms Introduction In computer graphics is often necessary to change: the
Geometry: Unit 1: Transformations. Chapter 14 (In Textbook)
") Geometry: Unit 1: Transformations Chapter 14 (In Textbook) Transformations Objective: Students will be able to do the following, regarding geometric transformations. Write Transformations Symbolically
Geometry: Unit 1: Transformations Chapter 14 (In Textbook) Transformations Objective: Students will be able to do the following, regarding geometric transformations. Write Transformations Symbolically
Computer Graphics 7: Viewing in 3-D
 Computer Graphics 7: Viewing in 3-D In today s lecture we are going to have a look at: Transformations in 3-D How do transformations in 3-D work? Contents 3-D homogeneous coordinates and matrix based transformations
Computer Graphics 7: Viewing in 3-D In today s lecture we are going to have a look at: Transformations in 3-D How do transformations in 3-D work? Contents 3-D homogeneous coordinates and matrix based transformations
COMP3421. Introduction to 3D Graphics
 COMP3421 Introduction to 3D Graphics 3D coodinates Moving to 3D is simply a matter of adding an extra dimension to our points and vectors: 3D coordinates 3D coordinate systems can be left or right handed.
COMP3421 Introduction to 3D Graphics 3D coodinates Moving to 3D is simply a matter of adding an extra dimension to our points and vectors: 3D coordinates 3D coordinate systems can be left or right handed.
Chapter 5. Projections and Rendering
 Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Graphics and Interaction Transformation geometry and homogeneous coordinates
 433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
CS452/552; EE465/505. Models & Viewing
 CS452/552; EE465/505 Models & Viewing 2-03 15 Outline! Building Polygonal Models Vertex lists; gl.drawarrays( ) Edge lists: gl.drawelements( )! Viewing Classical Viewing Read: Viewing in Web3D Angel, Section
CS452/552; EE465/505 Models & Viewing 2-03 15 Outline! Building Polygonal Models Vertex lists; gl.drawarrays( ) Edge lists: gl.drawelements( )! Viewing Classical Viewing Read: Viewing in Web3D Angel, Section
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates
 COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
CSC 305 The Graphics Pipeline-1
 C. O. P. d y! "#"" (-1, -1) (1, 1) x z CSC 305 The Graphics Pipeline-1 by Brian Wyvill The University of Victoria Graphics Group Perspective Viewing Transformation l l l Tools for creating and manipulating
C. O. P. d y! "#"" (-1, -1) (1, 1) x z CSC 305 The Graphics Pipeline-1 by Brian Wyvill The University of Victoria Graphics Group Perspective Viewing Transformation l l l Tools for creating and manipulating
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Transformation Algebra
 Transformation Algebra R. J. Renka Department of Computer Science & Engineering University of North Texas 0/07/205 Linear Transformations A point with Cartesian coordinates (x, y, z) is taken to be a column
Transformation Algebra R. J. Renka Department of Computer Science & Engineering University of North Texas 0/07/205 Linear Transformations A point with Cartesian coordinates (x, y, z) is taken to be a column
Answers to practice questions for Midterm 1
 Answers to practice questions for Midterm Paul Hacking /5/9 (a The RREF (reduced row echelon form of the augmented matrix is So the system of linear equations has exactly one solution given by x =, y =,
Answers to practice questions for Midterm Paul Hacking /5/9 (a The RREF (reduced row echelon form of the augmented matrix is So the system of linear equations has exactly one solution given by x =, y =,
One or more objects A viewer with a projection surface Projectors that go from the object(s) to the projection surface
 to the projection surface") Classical Viewing Viewing requires three basic elements One or more objects A viewer with a projection surface Projectors that go from the object(s) to the projection surface Classical views are based
Classical Viewing Viewing requires three basic elements One or more objects A viewer with a projection surface Projectors that go from the object(s) to the projection surface Classical views are based
Adding vectors. Let s consider some vectors to be added.
 Vectors Some physical quantities have both size and direction. These physical quantities are represented with vectors. A common example of a physical quantity that is represented with a vector is a force.
Vectors Some physical quantities have both size and direction. These physical quantities are represented with vectors. A common example of a physical quantity that is represented with a vector is a force.
Image Warping. Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 26 Image Warping image filtering: change range of image g() T(f()) f T f image
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 26 Image Warping image filtering: change range of image g() T(f()) f T f image
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Multimedia Signals and Systems Virtual Reality and VRML
 Multimedia Signals and Systems Virtual Reality and VRML Kunio Takaya Electrical and Computer Engineering University of Saskatchewan January 16, 2008 ** Go to full-screen mode now by hitting CTRL-L 1 Contents
Multimedia Signals and Systems Virtual Reality and VRML Kunio Takaya Electrical and Computer Engineering University of Saskatchewan January 16, 2008 ** Go to full-screen mode now by hitting CTRL-L 1 Contents
Supplementary Material: The Rotation Matrix
 Supplementary Material: The Rotation Matrix Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2014 COMP 4766/6778 (MUN) The Rotation Matrix January
Supplementary Material: The Rotation Matrix Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2014 COMP 4766/6778 (MUN) The Rotation Matrix January
Computer Graphics: Viewing in 3-D. Course Website:
 Computer Graphics: Viewing in 3-D Course Website: http://www.comp.dit.ie/bmacnamee 2 Contents Transformations in 3-D How do transformations in 3-D work? 3-D homogeneous coordinates and matrix based transformations
Computer Graphics: Viewing in 3-D Course Website: http://www.comp.dit.ie/bmacnamee 2 Contents Transformations in 3-D How do transformations in 3-D work? 3-D homogeneous coordinates and matrix based transformations
Image Warping : Computational Photography Alexei Efros, CMU, Fall Some slides from Steve Seitz
 Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 2 Image Transformations image filtering: change range of image g() T(f())
Image Warping http://www.jeffre-martin.com Some slides from Steve Seitz 5-463: Computational Photograph Aleei Efros, CMU, Fall 2 Image Transformations image filtering: change range of image g() T(f())
Chap 7, 2008 Spring Yeong Gil Shin
 Three-Dimensional i Viewingi Chap 7, 28 Spring Yeong Gil Shin Viewing i Pipeline H d fi i d? How to define a window? How to project onto the window? Rendering "Create a picture (in a synthetic camera)
Three-Dimensional i Viewingi Chap 7, 28 Spring Yeong Gil Shin Viewing i Pipeline H d fi i d? How to define a window? How to project onto the window? Rendering "Create a picture (in a synthetic camera)
Transformations. Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico
 Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
Transforms. COMP 575/770 Spring 2013
 Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
1 OpenGL - column vectors (column-major ordering)
") OpenGL - column vectors (column-major ordering) OpenGL uses column vectors and matrices are written in a column-major order. As a result, matrices are concatenated in right-to-left order, with the first
OpenGL - column vectors (column-major ordering) OpenGL uses column vectors and matrices are written in a column-major order. As a result, matrices are concatenated in right-to-left order, with the first
Lecture 5: Transforms II. Computer Graphics and Imaging UC Berkeley CS184/284A
 Lecture 5: Transforms II Computer Graphics and Imaging UC Berkeley 3D Transforms 3D Transformations Use homogeneous coordinates again: 3D point = (x, y, z, 1) T 3D vector = (x, y, z, 0) T Use 4 4 matrices
Lecture 5: Transforms II Computer Graphics and Imaging UC Berkeley 3D Transforms 3D Transformations Use homogeneous coordinates again: 3D point = (x, y, z, 1) T 3D vector = (x, y, z, 0) T Use 4 4 matrices
521493S Computer Graphics Exercise 2 Solution (Chapters 4-5)
") 5493S Computer Graphics Exercise Solution (Chapters 4-5). Given two nonparallel, three-dimensional vectors u and v, how can we form an orthogonal coordinate system in which u is one of the basis vectors?
5493S Computer Graphics Exercise Solution (Chapters 4-5). Given two nonparallel, three-dimensional vectors u and v, how can we form an orthogonal coordinate system in which u is one of the basis vectors?
Three-Dimensional Viewing Hearn & Baker Chapter 7
 Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]
![Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]](/thumbs/93/111713975.jpg "Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]") Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
COMP3421. Introduction to 3D Graphics
 COMP3421 Introduction to 3D Graphics 3D coodinates Moving to 3D is simply a matter of adding an extra dimension to our points and vectors: 3D coordinates 3D coordinate systems can be left or right handed.
COMP3421 Introduction to 3D Graphics 3D coodinates Moving to 3D is simply a matter of adding an extra dimension to our points and vectors: 3D coordinates 3D coordinate systems can be left or right handed.
Lecture 6 Sections 4.3, 4.6, 4.7. Wed, Sep 9, 2009
 Lecture 6 Sections 4.3, 4.6, 4.7 Hampden-Sydney College Wed, Sep 9, 2009 Outline 1 2 3 4 re are three mutually orthogonal axes: the x-axis, the y-axis, and the z-axis. In the standard viewing position,
Lecture 6 Sections 4.3, 4.6, 4.7 Hampden-Sydney College Wed, Sep 9, 2009 Outline 1 2 3 4 re are three mutually orthogonal axes: the x-axis, the y-axis, and the z-axis. In the standard viewing position,
Computer Graphics. P05 Viewing in 3D. Part 1. Aleksandra Pizurica Ghent University
 Computer Graphics P05 Viewing in 3D Part 1 Aleksandra Pizurica Ghent University Telecommunications and Information Processing Image Processing and Interpretation Group Viewing in 3D: context Create views
Computer Graphics P05 Viewing in 3D Part 1 Aleksandra Pizurica Ghent University Telecommunications and Information Processing Image Processing and Interpretation Group Viewing in 3D: context Create views
Computer Graphics. Chapter 5 Geometric Transformations. Somsak Walairacht, Computer Engineering, KMITL
 Chapter 5 Geometric Transformations Somsak Walairacht, Computer Engineering, KMITL 1 Outline Basic Two-Dimensional Geometric Transformations Matrix Representations and Homogeneous Coordinates Inverse Transformations
Chapter 5 Geometric Transformations Somsak Walairacht, Computer Engineering, KMITL 1 Outline Basic Two-Dimensional Geometric Transformations Matrix Representations and Homogeneous Coordinates Inverse Transformations
BASIC ELEMENTS. Geometry is the study of the relationships among objects in an n-dimensional space
 GEOMETRY 1 OBJECTIVES Introduce the elements of geometry Scalars Vectors Points Look at the mathematical operations among them Define basic primitives Line segments Polygons Look at some uses for these
GEOMETRY 1 OBJECTIVES Introduce the elements of geometry Scalars Vectors Points Look at the mathematical operations among them Define basic primitives Line segments Polygons Look at some uses for these
Transformations Computer Graphics I Lecture 4
 15-462 Computer Graphics I Lecture 4 Transformations Vector Spaces Affine and Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices January 23, 2003 [Angel, Ch. 4] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 4 Transformations Vector Spaces Affine and Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices January 23, 2003 [Angel, Ch. 4] Frank Pfenning Carnegie
Three-Dimensional Graphics III. Guoying Zhao 1 / 67
 Computer Graphics Three-Dimensional Graphics III Guoying Zhao 1 / 67 Classical Viewing Guoying Zhao 2 / 67 Objectives Introduce the classical views Compare and contrast image formation by computer with
Computer Graphics Three-Dimensional Graphics III Guoying Zhao 1 / 67 Classical Viewing Guoying Zhao 2 / 67 Objectives Introduce the classical views Compare and contrast image formation by computer with
Script for the Excel-based applet StereogramHeijn_v2.2.xls
 Script for the Excel-based applet StereogramHeijn_v2.2.xls Heijn van Gent, MSc. 25.05.2006 Aim of the applet: The aim of this applet is to plot planes and lineations in a lower Hemisphere Schmidt Net using
Script for the Excel-based applet StereogramHeijn_v2.2.xls Heijn van Gent, MSc. 25.05.2006 Aim of the applet: The aim of this applet is to plot planes and lineations in a lower Hemisphere Schmidt Net using
Overview. Viewing and perspectives. Planar Geometric Projections. Classical Viewing. Classical views Computer viewing Perspective normalization
 Overview Viewing and perspectives Classical views Computer viewing Perspective normalization Classical Viewing Viewing requires three basic elements One or more objects A viewer with a projection surface
Overview Viewing and perspectives Classical views Computer viewing Perspective normalization Classical Viewing Viewing requires three basic elements One or more objects A viewer with a projection surface
CS 563 Advanced Topics in Computer Graphics. by Emmanuel Agu
 CS 563 Advanced Topics in Computer Graphics by Emmanuel Agu Parsing: uses lex and yacc: core/pbrtlex.l and core/pbrtparse.y After parsing, a scene object is created (core/scene.*) Rendering: Scene::Render()
CS 563 Advanced Topics in Computer Graphics by Emmanuel Agu Parsing: uses lex and yacc: core/pbrtlex.l and core/pbrtparse.y After parsing, a scene object is created (core/scene.*) Rendering: Scene::Render()
Transformations: 2D Transforms
 1. Translation Transformations: 2D Transforms Relocation of point WRT frame Given P = (x, y), translation T (dx, dy) Then P (x, y ) = T (dx, dy) P, where x = x + dx, y = y + dy Using matrix representation
1. Translation Transformations: 2D Transforms Relocation of point WRT frame Given P = (x, y), translation T (dx, dy) Then P (x, y ) = T (dx, dy) P, where x = x + dx, y = y + dy Using matrix representation
Overview of Transformations (18 marks) In many applications, changes in orientations, size, and shape are accomplished with
 In many applications, changes in orientations, size, and shape are accomplished with") Two Dimensional Transformations In many applications, changes in orientations, size, and shape are accomplished with geometric transformations that alter the coordinate descriptions of objects. Basic geometric
Two Dimensional Transformations In many applications, changes in orientations, size, and shape are accomplished with geometric transformations that alter the coordinate descriptions of objects. Basic geometric
Classical and Computer Viewing. Adapted From: Ed Angel Professor of Emeritus of Computer Science University of New Mexico
 Classical and Computer Viewing Adapted From: Ed Angel Professor of Emeritus of Computer Science University of New Mexico Planar Geometric Projections Standard projections project onto a plane Projectors
Classical and Computer Viewing Adapted From: Ed Angel Professor of Emeritus of Computer Science University of New Mexico Planar Geometric Projections Standard projections project onto a plane Projectors
1 Transformations. Chapter 1. Transformations. Department of Computer Science and Engineering 1-1
 Transformations 1-1 Transformations are used within the entire viewing pipeline: Projection from world to view coordinate system View modifications: Panning Zooming Rotation 1-2 Transformations can also
Transformations 1-1 Transformations are used within the entire viewing pipeline: Projection from world to view coordinate system View modifications: Panning Zooming Rotation 1-2 Transformations can also
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Transforms II. Overview. Homogeneous Coordinates 3-D Transforms Viewing Projections. Homogeneous Coordinates. x y z w
 Transforms II Overvie Homogeneous Coordinates 3- Transforms Vieing Projections 2 Homogeneous Coordinates Allos translations to be included into matri transform. Allos us to distinguish beteen a vector
Transforms II Overvie Homogeneous Coordinates 3- Transforms Vieing Projections 2 Homogeneous Coordinates Allos translations to be included into matri transform. Allos us to distinguish beteen a vector
Camera Pose Measurement from 2D-3D Correspondences of Three Z Shaped Lines
 International Journal of Intelligent Engineering & Systems http://www.inass.org/ Camera Pose Measurement from 2D-3D Correspondences of Three Z Shaped Lines Chang Liu 1,2,3,4, Feng Zhu 1,4, Jinjun Ou 1,4,
International Journal of Intelligent Engineering & Systems http://www.inass.org/ Camera Pose Measurement from 2D-3D Correspondences of Three Z Shaped Lines Chang Liu 1,2,3,4, Feng Zhu 1,4, Jinjun Ou 1,4,
2D and 3D Viewing Basics
 CS10101001 2D and 3D Viewing Basics Junqiao Zhao 赵君峤 Department of Computer Science and Technology College of Electronics and Information Engineering Tongji University Viewing Analog to the physical viewing
CS10101001 2D and 3D Viewing Basics Junqiao Zhao 赵君峤 Department of Computer Science and Technology College of Electronics and Information Engineering Tongji University Viewing Analog to the physical viewing
2.1 Three Dimensional Concepts
 UNIT - II THREE-DIMENSIONAL CONCEPTS Parallel and Perspective projections-three-dimensional Object Representations Polygons, Curved lines,splines, Quadric Surfaces- Visualization of data sets- Three- Transformations
UNIT - II THREE-DIMENSIONAL CONCEPTS Parallel and Perspective projections-three-dimensional Object Representations Polygons, Curved lines,splines, Quadric Surfaces- Visualization of data sets- Three- Transformations
2D and 3D Transformations AUI Course Denbigh Starkey
 2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
2D and 3D Transformations AUI Course Denbigh Starkey. Introduction 2 2. 2D transformations using Cartesian coordinates 3 2. Translation 3 2.2 Rotation 4 2.3 Scaling 6 3. Introduction to homogeneous coordinates
Lesson 5.6: Angles in Standard Position
 Lesson 5.6: Angles in Standard Position IM3 - Santowski IM3 - Santowski 1 Fast Five Opening Exercises! Use your TI 84 calculator:! Evaluate sin(50 ) " illustrate with a diagram! Evaluate sin(130 ) " Q
Lesson 5.6: Angles in Standard Position IM3 - Santowski IM3 - Santowski 1 Fast Five Opening Exercises! Use your TI 84 calculator:! Evaluate sin(50 ) " illustrate with a diagram! Evaluate sin(130 ) " Q
Three Dimensional Geometry. Linear Programming
 Three Dimensional Geometry Linear Programming A plane is determined uniquely if any one of the following is known: The normal to the plane and its distance from the origin is given, i.e. equation of a
Three Dimensional Geometry Linear Programming A plane is determined uniquely if any one of the following is known: The normal to the plane and its distance from the origin is given, i.e. equation of a
Computer Graphics. Jeng-Sheng Yeh 葉正聖 Ming Chuan University (modified from Bing-Yu Chen s slides)
") Computer Graphics Jeng-Sheng Yeh 葉正聖 Ming Chuan Universit (modified from Bing-Yu Chen s slides) Viewing in 3D 3D Viewing Process Specification of an Arbitrar 3D View Orthographic Parallel Projection Perspective
Computer Graphics Jeng-Sheng Yeh 葉正聖 Ming Chuan Universit (modified from Bing-Yu Chen s slides) Viewing in 3D 3D Viewing Process Specification of an Arbitrar 3D View Orthographic Parallel Projection Perspective
Computer Graphics. Chapter 7 2D Geometric Transformations
 Computer Graphics Chapter 7 2D Geometric Transformations Chapter 7 Two-Dimensional Geometric Transformations Part III. OpenGL Functions for Two-Dimensional Geometric Transformations OpenGL Geometric Transformation
Computer Graphics Chapter 7 2D Geometric Transformations Chapter 7 Two-Dimensional Geometric Transformations Part III. OpenGL Functions for Two-Dimensional Geometric Transformations OpenGL Geometric Transformation
Computer Graphics. Ch 6. 3D Viewing
 Computer Graphics Ch 6. 3D Viewing 3D Viewing Basic do you see this image as flat? 12 lines 3D Coordinate System 3D homogeneous coordinates: p = [x y z w] T Our textbook and OpenGL use a RIGHT-HANDED system
Computer Graphics Ch 6. 3D Viewing 3D Viewing Basic do you see this image as flat? 12 lines 3D Coordinate System 3D homogeneous coordinates: p = [x y z w] T Our textbook and OpenGL use a RIGHT-HANDED system
Prof. Feng Liu. Fall /19/2016
 Prof. Feng Liu Fall 26 http://www.cs.pdx.edu/~fliu/courses/cs447/ /9/26 Last time More 2D Transformations Homogeneous Coordinates 3D Transformations The Viewing Pipeline 2 Today Perspective projection
Prof. Feng Liu Fall 26 http://www.cs.pdx.edu/~fliu/courses/cs447/ /9/26 Last time More 2D Transformations Homogeneous Coordinates 3D Transformations The Viewing Pipeline 2 Today Perspective projection
PreCalculus Unit 1: Unit Circle Trig Quiz Review (Day 9)
") PreCalculus Unit 1: Unit Circle Trig Quiz Review (Day 9) Name Date Directions: You may NOT use Right Triangle Trigonometry for any of these problems! Use your unit circle knowledge to solve these problems.
PreCalculus Unit 1: Unit Circle Trig Quiz Review (Day 9) Name Date Directions: You may NOT use Right Triangle Trigonometry for any of these problems! Use your unit circle knowledge to solve these problems.
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
[ ] [ ] Orthogonal Transformation of Cartesian Coordinates in 2D & 3D. φ = cos 1 1/ φ = tan 1 [ 2 /1]
![[ ] [ ] Orthogonal Transformation of Cartesian Coordinates in 2D & 3D. φ = cos 1 1/ φ = tan 1 [ 2 /1]](/thumbs/84/89383711.jpg "[ ] [ ] Orthogonal Transformation of Cartesian Coordinates in 2D & 3D. φ = cos 1 1/ φ = tan 1 [ 2 /1]") Orthogonal Transformation of Cartesian Coordinates in 2D & 3D A vector is specified b its coordinates, so it is defined relative to a reference frame. The same vector will have different coordinates in
Orthogonal Transformation of Cartesian Coordinates in 2D & 3D A vector is specified b its coordinates, so it is defined relative to a reference frame. The same vector will have different coordinates in
Viewing. Announcements. A Note About Transformations. Orthographic and Perspective Projection Implementation Vanishing Points
 Viewing Announcements. A Note About Transformations. Orthographic and Perspective Projection Implementation Vanishing Points Viewing Announcements. A Note About Transformations. Orthographic and Perspective
Viewing Announcements. A Note About Transformations. Orthographic and Perspective Projection Implementation Vanishing Points Viewing Announcements. A Note About Transformations. Orthographic and Perspective
Interactive Computer Graphics. Hearn & Baker, chapter D transforms Hearn & Baker, chapter 5. Aliasing and Anti-Aliasing
 Interactive Computer Graphics Aliasing and Anti-Aliasing Hearn & Baker, chapter 4-7 D transforms Hearn & Baker, chapter 5 Aliasing and Anti-Aliasing Problem: jaggies Also known as aliasing. It results
Interactive Computer Graphics Aliasing and Anti-Aliasing Hearn & Baker, chapter 4-7 D transforms Hearn & Baker, chapter 5 Aliasing and Anti-Aliasing Problem: jaggies Also known as aliasing. It results
Transformations Computer Graphics I Lecture 4
 15-462 Computer Graphics I Lecture 4 Transformations Vector Spaces Affine and Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices January 24, 2002 [Angel, Ch. 4] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 4 Transformations Vector Spaces Affine and Euclidean Spaces Frames Homogeneous Coordinates Transformation Matrices January 24, 2002 [Angel, Ch. 4] Frank Pfenning Carnegie
GEOMETRIC TRANSFORMATIONS AND VIEWING
 GEOMETRIC TRANSFORMATIONS AND VIEWING 2D and 3D 1/44 2D TRANSFORMATIONS HOMOGENIZED Transformation Scaling Rotation Translation Matrix s x s y cosθ sinθ sinθ cosθ 1 dx 1 dy These 3 transformations are
GEOMETRIC TRANSFORMATIONS AND VIEWING 2D and 3D 1/44 2D TRANSFORMATIONS HOMOGENIZED Transformation Scaling Rotation Translation Matrix s x s y cosθ sinθ sinθ cosθ 1 dx 1 dy These 3 transformations are
Computer Vision Systems. Viewing Systems Projections Illuminations Rendering Culling and Clipping Implementations
 Computer Vision Systems Viewing Systems Projections Illuminations Rendering Culling and Clipping Implementations Viewing Systems Viewing Transformation Projective Transformation 2D Computer Graphics Devices
Computer Vision Systems Viewing Systems Projections Illuminations Rendering Culling and Clipping Implementations Viewing Systems Viewing Transformation Projective Transformation 2D Computer Graphics Devices
Computing Complex Document Z-2. A DESCRIPTION OF THE LANGLEY WIREFRAME GEOMETRY STANDARD (LaWGS) FORMAT. Compiled by Charlotte B.
 FORMAT. Compiled by Charlotte B.") NASA TECHNICAL MEMORANDUM 85767 Central Scientific Computing Complex Document Z-2 A DESCRIPTION OF THE LANGLEY WIREFRAME GEOMETRY STANDARD (LaWGS) FORMAT Compiled by Charlotte B. Craidon February 1985
NASA TECHNICAL MEMORANDUM 85767 Central Scientific Computing Complex Document Z-2 A DESCRIPTION OF THE LANGLEY WIREFRAME GEOMETRY STANDARD (LaWGS) FORMAT Compiled by Charlotte B. Craidon February 1985
DD2429 Computational Photography :00-19:00
 . Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
. Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
Interactive Computer Graphics. Warping and morphing. Warping and Morphing. Warping and Morphing. Lecture 14+15: Warping and Morphing. What is.
 Interactive Computer Graphics Warping and morphing Lecture 14+15: Warping and Morphing Lecture 14: Warping and Morphing: Slide 1 Lecture 14: Warping and Morphing: Slide 2 Warping and Morphing What is Warping
Interactive Computer Graphics Warping and morphing Lecture 14+15: Warping and Morphing Lecture 14: Warping and Morphing: Slide 1 Lecture 14: Warping and Morphing: Slide 2 Warping and Morphing What is Warping
Announcements. Submitting Programs Upload source and executable(s) (Windows or Mac) to digital dropbox on Blackboard
 (Windows or Mac) to digital dropbox on Blackboard") Now Playing: Vertex Processing: Viewing Coulibaly Amadou & Mariam from Dimanche a Bamako Released August 2, 2005 Rick Skarbez, Instructor COMP 575 September 27, 2007 Announcements Programming Assignment
Now Playing: Vertex Processing: Viewing Coulibaly Amadou & Mariam from Dimanche a Bamako Released August 2, 2005 Rick Skarbez, Instructor COMP 575 September 27, 2007 Announcements Programming Assignment
3D Transformations World Window to Viewport Transformation Week 2, Lecture 4
 CS 430/536 Computer Graphics I 3D Transformations World Window to Viewport Transformation Week 2, Lecture 4 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory
CS 430/536 Computer Graphics I 3D Transformations World Window to Viewport Transformation Week 2, Lecture 4 David Breen, William Regli and Maxim Peysakhov Geometric and Intelligent Computing Laboratory
Homogeneous Coordinates and Transformations of the Plane
 2 Homogeneous Coordinates and Transformations of the Plane 2. Introduction In Chapter planar objects were manipulated by applying one or more transformations. Section.7 identified the problem that the
2 Homogeneous Coordinates and Transformations of the Plane 2. Introduction In Chapter planar objects were manipulated by applying one or more transformations. Section.7 identified the problem that the
Computer Graphics. Bing-Yu Chen National Taiwan University The University of Tokyo
 Computer Graphics Bing-Yu Chen National Taiwan Universit The Universit of Toko Viewing in 3D 3D Viewing Process Classical Viewing and Projections 3D Snthetic Camera Model Parallel Projection Perspective
Computer Graphics Bing-Yu Chen National Taiwan Universit The Universit of Toko Viewing in 3D 3D Viewing Process Classical Viewing and Projections 3D Snthetic Camera Model Parallel Projection Perspective
Last week. Machiraju/Zhang/Möller
 Last week Machiraju/Zhang/Möller 1 Overview of a graphics system Output device Input devices Image formed and stored in frame buffer Machiraju/Zhang/Möller 2 Introduction to CG Torsten Möller 3 Ray tracing:
Last week Machiraju/Zhang/Möller 1 Overview of a graphics system Output device Input devices Image formed and stored in frame buffer Machiraju/Zhang/Möller 2 Introduction to CG Torsten Möller 3 Ray tracing:
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Camera Projection Models We will introduce different camera projection models that relate the location of an image point to the coordinates of the
 Camera Projection Models We will introduce different camera projection models that relate the location of an image point to the coordinates of the corresponding 3D points. The projection models include:
Camera Projection Models We will introduce different camera projection models that relate the location of an image point to the coordinates of the corresponding 3D points. The projection models include:
EECE 478. Learning Objectives. Learning Objectives. Linear Algebra and 3D Geometry. Linear algebra in 3D. Coordinate systems
 EECE 478 Linear Algebra and 3D Geometry Learning Objectives Linear algebra in 3D Define scalars, points, vectors, lines, planes Manipulate to test geometric properties Coordinate systems Use homogeneous
EECE 478 Linear Algebra and 3D Geometry Learning Objectives Linear algebra in 3D Define scalars, points, vectors, lines, planes Manipulate to test geometric properties Coordinate systems Use homogeneous
Rational Numbers: Graphing: The Coordinate Plane
 Rational Numbers: Graphing: The Coordinate Plane A special kind of plane used in mathematics is the coordinate plane, sometimes called the Cartesian plane after its inventor, René Descartes. It is one
Rational Numbers: Graphing: The Coordinate Plane A special kind of plane used in mathematics is the coordinate plane, sometimes called the Cartesian plane after its inventor, René Descartes. It is one
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
To graph the point (r, θ), simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6
, simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6") Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Contents. Graphics Library Display 2D/3D objects Coordinate Systems Window and Viewport Transformation. CAD Graphics - 1
 Contents Graphics Library Display 2D/3D objects Coordinate Systems Window and Viewport Transformation CAD Graphics - 1 Device Driver vs. Graphics Library Device Driver A set of codes that controls a physical
Contents Graphics Library Display 2D/3D objects Coordinate Systems Window and Viewport Transformation CAD Graphics - 1 Device Driver vs. Graphics Library Device Driver A set of codes that controls a physical