A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance
|
|
|
- Osborne Spencer
- 5 years ago
- Views:
Transcription
 Laboratory Department of Civil, Environmental and Geodetic Engineering The Ohio State University Email: toth.2@osu.")
1 A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance Charles Toth, Dorota A Grejner-Brzezinska, Carla Bailo and Joanna Pinkerton Satellite Positioning and Inertial Navigation (SPIN) Laboratory Department of Civil, Environmental and Geodetic Engineering The Ohio State University toth.2@osu.edu 2017 OTEC Symposium Columbus October 10-11,
2 Driverless Vehicle Technology As vehicle technology is moving towards higher autonomy, the demand for highly accurate map data is rapidly increasing, as accurate maps have a huge potential to increasing safety. In particular, engineering scale 3D maps, including road topography and infrastructure as well as city models along the transportation corridor represent tremendous support for driverless vehicles. The quality of the 3D data, measured in accuracy and currency must be clearly far superior to any conventional map data, traditionally provided by federal and local governments, and also significantly richer in information than the typical 2D map data used in car navigation systems. In a Smart City environment, integrated data exchange can provide the link between the geospatial/gis database and the vehicles (V2I/V2X). Access to this database, which includes high definition 3D maps and the corresponding metadata, is essential for autonomous vehicles as it facilitates the sensor systems to accurately relate the vehicle s location/trajectory to the surrounding environment in any situation. 2
 Full autonomy is")
3 Driverless Vehicle Technology Driverless technology is rapidly evolving High-definition geospatial/gis data is an enabling component to improve localization and, subsequently, safety Huge amount of GIS data is already available, the question is how to access it, and then the communication Crowdsourcing will be the dominant data acquisition technology (Big Data, Big Geo Data) Full autonomy is still a long way 3
4 Motivation Driving by human beings is found to be dangerous and has led to countless deaths over the years. Worldwide, per the Global Road Crash Data [1], traffic crashes are the major cause of death and injuries, specifically estimated at 1.3 million fatalities each year, on average 3,287 deaths per day. In the United States, there are over 37,000 deaths and an additional 2.35 million injuries in road crashes each year. Of these, 94% are caused by human error [4], reported by USA s National Highway Traffic Safety Administration (NHTSA) research. The cost of traffic crashes is incredibly high, reaching USD $518 billion globally and $230.6 billion in United States. Unless action is taken, traffic crashes are predicted to be the fifth leading cause of death by
 An average American driver")

5 Traffic in Cities Most of the accident happen close to our homes (urban areas) An average American driver spends nearly 300 hours on road each year Traffic congestion and parking are painful Picture credit: pixabay 5


6 Smart Columbus 6

7 Olli at CAR 7

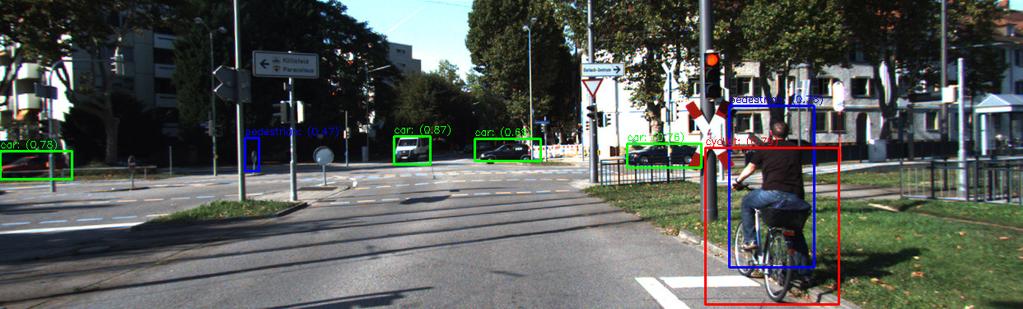
8 Collision Avoidance Dynamic object detection on road Object detection is the process of finding instances of real-world objects such as vehicles, bicycles in images or videos. Traditionally, Support Vector Machine (SVM) combined with the Histogram of Orientation (HOG) features have become the most efficient algorithm 8




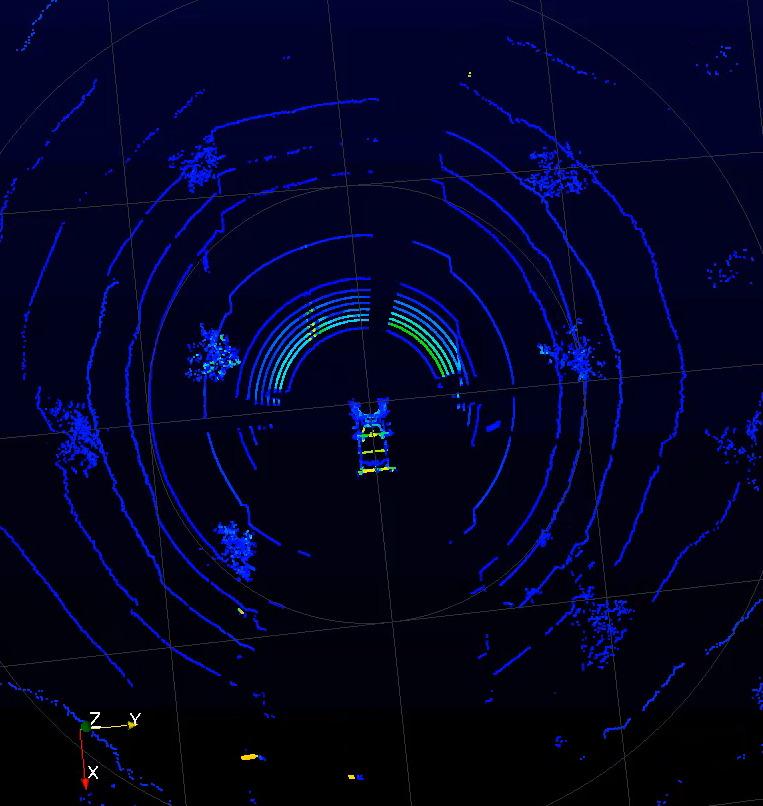
9 Tracking 9


10 Tracking 10


11 OSU GPSVan General sensor platform with highly accurate georeferencing system Data acquisition capabilities to support Creating accurate high-definition maps Provide sensor data stream to support driverless vehicle technology research 11
12 Sensors and FOV 12

13 Navigating without Maps OSU data, SPIN Lab CDD/IMU/SLAM solution 13
14 Various Viewpoints Many people involved in driverless technologies approach the problem from different angles Navigation/positioning people focus on GPS/GNSS trying to push the envelop; accuracy matters but confidence in the data is more important Sensor manufacturers are divided by technologies Optical sensing Laserscanning Radar Navigation and mapping fields are converging Car manufacturers are learning, just recognizing the importance of geospatial/gis data Many companies are already acquiring high-definition maps, hoping to sell it manufacturers 14
15 Vehicle Localization Localization accuracy required by autonomous driving High accuracy: 3-10 cm Single frequency GPS is not enough accurate (2-5 m, no GPS) More complex GPS processing requires communication and special infrastructure (RTK, GNSS) Urban canyon effect is still a problem IMU has large drift error and navigation-grade IMUs are expensive Solution: Map matching algorithms provide reliable and accurate localization solution Map matching requires precise map a prior the drive 15
16 Navigating with Maps KITTI data, widely used benchmark, SPIN Lab CDD/IMU/SLAM solution 16
17 High Definition Maps How to obtain precise map? Mobile mapping (e.g. Google Street View; not accurate) First, the autonomous vehicle has to be driven manually along the route to create a map (SLAM); e.g., shuttles Crowdsourcing: Vehicles/platforms share information (vehicle to vehicle, V2V distributed, or vehicle to infrastructure, V2I, centralized), including Precise location information Redundant video and other sensor streams (bandwidth is an issue) Detailed representation of the scene (requires the processing of the sensor streams) 17


18 What is Mapped? iphone Android 18
19 MobileEye Implementation MobileEye s Road Experience Management (REM) The solution is comprised of three layers: harvesting agents (any camera-equipped vehicle), map aggregating server (cloud), and map-consuming agents (autonomous vehicle): The harvesting agents collect and transmit data about the driving path s geometry and stationary landmarks around it The cloud server aggregates and reconciles the continuous stream of Road Segment Data a process resulting in a highly accurate and low level Time to Reflect Reality map, called Roadbook (MobilEye GIS) The last link in the mapping chain is localization, in order for any map to be used by an autonomous vehicle, the vehicle must be able to localize itself within it, the Mobileye software running within the map-consuming agent (the autonomous vehicle) automatically localizes the vehicle within the Roadbook by realtime detection of all landmarks stored in it 19


20 City Model Demonstration Power of crowdsourcing: Building Rome in a day Researchers create 3D model of cities using images shared on Flickr (2009) Website: Videos: 80DB3AD6 20
21 Pilot Project Objectives Sensing Data for Autonomous Mobility: OSU Campus Benchmark Dataset Collection to Aid Autonomous Vehicle Testing in Smart Columbus The main objective is to acquire data streams from mobile platforms, including vehicles, bicycles, pedestrians, etc. These data are essential to testing vehicle sensing and maneuvering capabilities, and directly support research and development of autonomous vehicle technologies. A second objective is to create a high definition map of the test area that includes the mobile data collection and additional surveying of the area. The availability of such maps has a significant effect on autonomous driving by providing a detailed description of the object space of and around the transportation corridor, greatly improving the reliability of the vehicle s self localization and path planning capabilities. 21




22 High-precision Mapping OSU Sensors, Data 22
23 High-precision Mapping Capabilities Data acquisition components: Local reference GPS network (densified, if needed, by the OSU team) GPSVan, mobile mapping platform to collect data High-accuracy georeferencing system (permanently installed) GPS/GNSS data for platform positioning IMU data for platform positioning and orientation data Imaging sensors (configuration depends on project objectives) Various digital cameras; video and still imagery from various perspectives Mobile laserscanner data to generate dense point clouds Phase 1 data processing steps: Static georeferencing data processing Vehicle trajectory computation LiDAR and image point cloud processing 23
24 Sensor Configuration Sensor # of Storage FOV [ ] Sampling rate Data rate sensors Gbyte/hour Velodyne VLP x Hz 2 MB/s 7.2 Velodyne HDL x Hz 4 MB/s 14.4 GoPro Hz 60 MB/s 216 Nikon 1 45/65 1 Hz 15 MB/s 65 Point Grey Hz 120 MB/s 400 Sony Nex Hz 48 MB/s 172 Canon 2 45 Video mode 15 MB/s 54 Casio 2 45 Video mode 15 MB/s 54 MobileEye 1 MicroStrain IMU 1 N/A 200 Hz 100 kb/s 0.36 EPSON IMU 1 N/A 300 Hz 150 kb/s 0.54 H764G 2 N/A 256 Hz 200 MB/h 0.20 GPS 2 N/A 5Hz 0.02 Total: ~ 1 TB 24

25 Observation Space, Sensor FOV 25
26 Schedule 1. System configuration Sensor selection FOV optimization Sampling rate 2. System shake-up Laboratory testing CAR/road testing 3. System calibration, sensor orientation with respect to vehicle reference frame Target site construction at CAR (point and planar controls) Calibration measurements Processing, estimating calibration 4. Main data collections 1. Set 1, data collection around CAR 2. Set 2, data collection on Campus 3. Set 3, data collection including reference moving objects, including bicycles and pedestrians, equipped with GPS/IMU/UWB positioning and imaging sensors 26



27 SUMMER DATA ACQUISITION 27

28 Laser Data 28


29 Multiple Vehicle Configuration 29
30 Summary Driverless vehicle technologies greatly benefit from high resolution city model level geospatial data Mapping, data acquisition methods for transportation GIS systems are rapidly changing Need for high-definition, and highly accurate geospatial data is quickly growing Crowdsourcing is becoming mainstream; vehicles are becoming the prime source of geospatial data Communication is essential; Smart City environment provides the larger framework, integrated data exchange can provide the link between the geospatial/gis database and the vehicles (V2I/V2X) 30
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery
 Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery Seth Young 1, Charles Toth 2, Zoltan Koppanyi 2 1 Department of Civil, Environmental and Geodetic Engineering The Ohio State
Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery Seth Young 1, Charles Toth 2, Zoltan Koppanyi 2 1 Department of Civil, Environmental and Geodetic Engineering The Ohio State
Intel and Mobileye Autonomous Driving Solutions
 Product Brief Autonomous Driving Intel and Mobileye Autonomous Driving Solutions Together, Mobileye and Intel deliver scalable and versatile solutions using purpose-built software and efficient, powerful
Product Brief Autonomous Driving Intel and Mobileye Autonomous Driving Solutions Together, Mobileye and Intel deliver scalable and versatile solutions using purpose-built software and efficient, powerful
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery
 Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Reference Data Set for Performance Evaluation of MEMS-based Integrated Navigation Solutions
 Reference Data Set for Performance Evaluation of MEMS-based Integrated Navigation Solutions Charles TOTH, Dorota BRZEZINSKA, USA Nonie POLITI, Allison KEALY, Australia Key words: MEMS sensors, performance
Reference Data Set for Performance Evaluation of MEMS-based Integrated Navigation Solutions Charles TOTH, Dorota BRZEZINSKA, USA Nonie POLITI, Allison KEALY, Australia Key words: MEMS sensors, performance
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
IP-S2 HD. High Definition 3D Mobile Mapping System
 IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
A New Direction in GIS Data Collection or Why Are You Still in the Field?
 GeoAutomation The Mobile Mapping System Survey-Enabled Imagery A New Direction in GIS Data Collection or Why Are You Still in the Field? Presentation to: URISA BC GIS Technology Showcase January 19, 2011
GeoAutomation The Mobile Mapping System Survey-Enabled Imagery A New Direction in GIS Data Collection or Why Are You Still in the Field? Presentation to: URISA BC GIS Technology Showcase January 19, 2011
Bringing Singapore to life in 3D
 Bringing Singapore to life in 3D Dr Victor Khoo, Deputy Director Singapore Land Authority Bringing Singapore to life in 3D ESRI Singapore UC 2016 Dr. Victor Khoo Singapore Land Authority SLA 2016 RESTRICTED
Bringing Singapore to life in 3D Dr Victor Khoo, Deputy Director Singapore Land Authority Bringing Singapore to life in 3D ESRI Singapore UC 2016 Dr. Victor Khoo Singapore Land Authority SLA 2016 RESTRICTED
An Overview of Applanix.
 An Overview of Applanix The Company The Industry Leader in Developing Aided Inertial Technology Founded on Canadian Aerospace and Defense Industry Expertise Providing Precise Position and Orientation Systems
An Overview of Applanix The Company The Industry Leader in Developing Aided Inertial Technology Founded on Canadian Aerospace and Defense Industry Expertise Providing Precise Position and Orientation Systems
The Most Comprehensive Solution for Indoor Mapping Applications
 The Most Comprehensive Solution for Indoor Mapping Applications TRIMBLE INDOOR MOBILE MAPPING SOLUTION TRIMBLE INDOOR MOBILE MAPPING SOLUTION (TIMMS): HIGH EFFICIENCY, MAXIMUM FLEXIBILITY, ALL-IN-ONE PACKAGE
The Most Comprehensive Solution for Indoor Mapping Applications TRIMBLE INDOOR MOBILE MAPPING SOLUTION TRIMBLE INDOOR MOBILE MAPPING SOLUTION (TIMMS): HIGH EFFICIENCY, MAXIMUM FLEXIBILITY, ALL-IN-ONE PACKAGE
Jeffrey A. Schepers P.S. EIT Geospatial Services Holland Engineering Inc. 220 Hoover Blvd, Suite 2, Holland, MI Desk
 Jeffrey A. Schepers P.S. EIT Geospatial Services Holland Engineering Inc. 220 Hoover Blvd, Suite 2, Holland, MI 49423 616-594-5127 Desk 616-322-1724 Cell 616-392-5938 Office Mobile LiDAR - Laser Scanning
Jeffrey A. Schepers P.S. EIT Geospatial Services Holland Engineering Inc. 220 Hoover Blvd, Suite 2, Holland, MI 49423 616-594-5127 Desk 616-322-1724 Cell 616-392-5938 Office Mobile LiDAR - Laser Scanning
Data, Data, Everywhere. We are now in the Big Data Era.
 Data, Data, Everywhere. We are now in the Big Data Era. CONTENTS Background Big Data What is Generating our Big Data Physical Management of Big Data Optimisation in Data Processing Techniques for Handling
Data, Data, Everywhere. We are now in the Big Data Era. CONTENTS Background Big Data What is Generating our Big Data Physical Management of Big Data Optimisation in Data Processing Techniques for Handling
Collaborative Mapping with Streetlevel Images in the Wild. Yubin Kuang Co-founder and Computer Vision Lead
 Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization
 Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
IP-S2 HD HD IP-S2. 3D Mobile Mapping System. 3D Mobile Mapping System
 HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
HD HD 3D Mobile Mapping System 3D Mobile Mapping System Capture Geo-referenced, Time-Stamped Point Clouds and Imagery 3D Scanning of Roadside Features 360º Camera for Spherical Image Capture Dual Frequency
Hardware 3D Mapping Systems
 Hardware 3D Mapping Systems About Us GreenValley International GreenValley International provides 3D mapping solutions that include mobile & aerial LiDAR acquisition hardware, post-processing software
Hardware 3D Mapping Systems About Us GreenValley International GreenValley International provides 3D mapping solutions that include mobile & aerial LiDAR acquisition hardware, post-processing software
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Iwane Mobile Mapping System
 Iwane Mobile Mapping System Geo-Imaging Mobile Mapping Solution Iwane Mobile Mapping System (IMMS) is high-efficient, easyto-use, end-to-end solution that provides tremendous flexibility in collecting,
Iwane Mobile Mapping System Geo-Imaging Mobile Mapping Solution Iwane Mobile Mapping System (IMMS) is high-efficient, easyto-use, end-to-end solution that provides tremendous flexibility in collecting,
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving. Frank Schuster, Dr. Martin Haueis
 Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
Measuring the World: Designing Robust Vehicle Localization for Autonomous Driving Frank Schuster, Dr. Martin Haueis Agenda Motivation: Why measure the world for autonomous driving? Map Content: What do
ROAD-SCANNER COMPACT APPLICATION FIELDS MAIN FEATURES
 ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
2/9/2016. Session Agenda: Implementing new Geospatial Technologies for more efficient data capture
 Implementing new Geospatial Technologies for more efficient data capture Jay Haskamp Applied Geospatial Engineer Steve Richter VP Sales Session Agenda: Today s changing technologies and what lies ahead
Implementing new Geospatial Technologies for more efficient data capture Jay Haskamp Applied Geospatial Engineer Steve Richter VP Sales Session Agenda: Today s changing technologies and what lies ahead
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications ESRI International Users Conference July 2012 Table Of Contents Connected Vehicle Program Goals Mapping
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications ESRI International Users Conference July 2012 Table Of Contents Connected Vehicle Program Goals Mapping
InteLAS Family of Mobile LiDAR Systems
 InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Connected Car. Dr. Sania Irwin. Head of Systems & Applications May 27, Nokia Solutions and Networks 2014 For internal use
 Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
Connected Car Dr. Sania Irwin Head of Systems & Applications May 27, 2015 1 Nokia Solutions and Networks 2014 For internal use Agenda Introduction Industry Landscape Industry Architecture & Implications
Real-Time Insights from the Source
 LATENCY LATENCY LATENCY Real-Time Insights from the Source This white paper provides an overview of edge computing, and how edge analytics will impact and improve the trucking industry. What Is Edge Computing?
LATENCY LATENCY LATENCY Real-Time Insights from the Source This white paper provides an overview of edge computing, and how edge analytics will impact and improve the trucking industry. What Is Edge Computing?
Future Implications for the Vehicle When Considering the Internet of Things (IoT)
") Future Implications for the Vehicle When Considering the Internet of Things (IoT) FTF-AUT-F0082 Richard Soja Automotive MCU Systems Engineer A P R. 2 0 1 4 TM External Use Agenda Overview of Existing Automotive
Future Implications for the Vehicle When Considering the Internet of Things (IoT) FTF-AUT-F0082 Richard Soja Automotive MCU Systems Engineer A P R. 2 0 1 4 TM External Use Agenda Overview of Existing Automotive
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
Accelerating solutions for highway safety, renewal, reliability, and capacity. Connected Vehicles and the Future of Transportation
 Accelerating solutions for highway safety, renewal, reliability, and capacity Regional Operations Forums Connected Vehicles and the Future of Transportation ti Session Overview What are connected and automated
Accelerating solutions for highway safety, renewal, reliability, and capacity Regional Operations Forums Connected Vehicles and the Future of Transportation ti Session Overview What are connected and automated
ITS (Intelligent Transportation Systems) Solutions
 Solutions") Special Issue Advanced Technologies and Solutions toward Ubiquitous Network Society ITS (Intelligent Transportation Systems) Solutions By Makoto MAEKAWA* Worldwide ITS goals for safety and environment
Special Issue Advanced Technologies and Solutions toward Ubiquitous Network Society ITS (Intelligent Transportation Systems) Solutions By Makoto MAEKAWA* Worldwide ITS goals for safety and environment
Mobile Mapping and Navigation. Brad Kohlmeyer NAVTEQ Research
 Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Roger C. Lanctot Director, Automotive Connected Mobility
 Roger C. Lanctot Director, Automotive Connected Mobility Roger Lanctot has 25+ years of experience as a journalist, analyst and consultant advising electronics companies, car companies, wireless carriers,
Roger C. Lanctot Director, Automotive Connected Mobility Roger Lanctot has 25+ years of experience as a journalist, analyst and consultant advising electronics companies, car companies, wireless carriers,
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
LANDINS Georeferencing and Orientation System
 LANDINS Georeferencing and Orientation System LANDINS Georeferencing and Orientation System Landins is a simple, turnkey position and orientation system for land-based mobile applications. It offers dependable
LANDINS Georeferencing and Orientation System LANDINS Georeferencing and Orientation System Landins is a simple, turnkey position and orientation system for land-based mobile applications. It offers dependable
ROAD SURFACE STRUCTURE MONITORING AND ANALYSIS USING HIGH PRECISION GPS MOBILE MEASUREMENT SYSTEMS (MMS)
") ROAD SURFACE STRUCTURE MONITORING AND ANALYSIS USING HIGH PRECISION GPS MOBILE MEASUREMENT SYSTEMS (MMS) Bonifacio R. Prieto PASCO Philippines Corporation, Pasig City, 1605, Philippines Email: bonifacio_prieto@pascoph.com
ROAD SURFACE STRUCTURE MONITORING AND ANALYSIS USING HIGH PRECISION GPS MOBILE MEASUREMENT SYSTEMS (MMS) Bonifacio R. Prieto PASCO Philippines Corporation, Pasig City, 1605, Philippines Email: bonifacio_prieto@pascoph.com
On A Traffic Control Problem Using Cut-Set of Graph
 1240 On A Traffic Control Problem Using Cut-Set of Graph Niky Baruah Department of Mathematics, Dibrugarh University, Dibrugarh : 786004, Assam, India E-mail : niky_baruah@yahoo.com Arun Kumar Baruah Department
1240 On A Traffic Control Problem Using Cut-Set of Graph Niky Baruah Department of Mathematics, Dibrugarh University, Dibrugarh : 786004, Assam, India E-mail : niky_baruah@yahoo.com Arun Kumar Baruah Department
(Subsea) Keith Vickery Zupt LLC
 Keith Vickery Zupt LLC") (Subsea) Keith Vickery Zupt LLC kv@zupt.com Offshore subsea infrastructure surveys (pipeline inspection, well, XT, and manifold inspections) are required to ensure compliance with both internal operator,
(Subsea) Keith Vickery Zupt LLC kv@zupt.com Offshore subsea infrastructure surveys (pipeline inspection, well, XT, and manifold inspections) are required to ensure compliance with both internal operator,
AIRBORNE GEIGER MODE LIDAR - LATEST ADVANCEMENTS IN REMOTE SENSING APPLICATIONS RANDY RHOADS
 Place image here (10 x 3.5 ) AIRBORNE GEIGER MODE LIDAR - LATEST ADVANCEMENTS IN REMOTE SENSING APPLICATIONS RANDY RHOADS Geospatial Industry Manager HARRIS.COM #HARRISCORP Harris Company Information SECURITY
Place image here (10 x 3.5 ) AIRBORNE GEIGER MODE LIDAR - LATEST ADVANCEMENTS IN REMOTE SENSING APPLICATIONS RANDY RHOADS Geospatial Industry Manager HARRIS.COM #HARRISCORP Harris Company Information SECURITY
Integrated Multi-Source LiDAR and Imagery
 Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING
 STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING Yuan Yang, Ph.D. Student Zoltan Koppanyi, Post-Doctoral Researcher Charles K Toth, Research Professor SPIN Lab The University
STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING Yuan Yang, Ph.D. Student Zoltan Koppanyi, Post-Doctoral Researcher Charles K Toth, Research Professor SPIN Lab The University
Leica Pegasus: Backpack
 Leica Pegasus: Backpack Fast Acquisition Accurate data Indoor/Outdoor projects Pegasus:Backpack Simple workflow Everything, Everywhere 1 Leica Pegasus: Backpack Award Winning System Remarks Multiple Award
Leica Pegasus: Backpack Fast Acquisition Accurate data Indoor/Outdoor projects Pegasus:Backpack Simple workflow Everything, Everywhere 1 Leica Pegasus: Backpack Award Winning System Remarks Multiple Award
Trimble Indoor Mobile Mapping Solution
 Kevin Perkins Applanix Corp. NATIONAL SURVEYING, MAPPING & GEOSPATIAL CONFERENCE - MARCH 13-17, 2017 Trimble Indoor Mobile Mapping Solution Why Indoor Mapping? The need: As-built maps/models of indoor
Kevin Perkins Applanix Corp. NATIONAL SURVEYING, MAPPING & GEOSPATIAL CONFERENCE - MARCH 13-17, 2017 Trimble Indoor Mobile Mapping Solution Why Indoor Mapping? The need: As-built maps/models of indoor
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems
 Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Reality Modeling Drone Capture Guide
 Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
DERIVING PEDESTRIAN POSITIONS FROM UNCALIBRATED VIDEOS
 DERIVING PEDESTRIAN POSITIONS FROM UNCALIBRATED VIDEOS Zoltan Koppanyi, Post-Doctoral Researcher Charles K. Toth, Research Professor The Ohio State University 2046 Neil Ave Mall, Bolz Hall Columbus, OH,
DERIVING PEDESTRIAN POSITIONS FROM UNCALIBRATED VIDEOS Zoltan Koppanyi, Post-Doctoral Researcher Charles K. Toth, Research Professor The Ohio State University 2046 Neil Ave Mall, Bolz Hall Columbus, OH,
VIA Mobile360 Surround View
 VIA Mobile360 Surround View VIA Mobile360 Surround View delivers real-time in-vehicle 360 video monitoring and recording to provide the most effective solution for driver monitoring, safety and vehicle
VIA Mobile360 Surround View VIA Mobile360 Surround View delivers real-time in-vehicle 360 video monitoring and recording to provide the most effective solution for driver monitoring, safety and vehicle
OPTIMIZING 3D SURFACE CHARACTERISTICS DATA COLLECTION BY RE-USING THE DATA FOR PROJECT LEVEL ROAD DESIGN
 OPTIMIZING 3D SURFACE CHARACTERISTICS DATA COLLECTION BY RE-USING THE DATA FOR PROJECT LEVEL ROAD DESIGN Benoit Petitclerc, P.E. John Laurent, M. Sc Richard Habel, M. Sc., Pavemetrics Systems Inc., Canada
OPTIMIZING 3D SURFACE CHARACTERISTICS DATA COLLECTION BY RE-USING THE DATA FOR PROJECT LEVEL ROAD DESIGN Benoit Petitclerc, P.E. John Laurent, M. Sc Richard Habel, M. Sc., Pavemetrics Systems Inc., Canada
Security for V2X Communications
 Security for V2X Communications ITS Canada Annual General Meeting May 1-4, 2016 Brian Romansky VP Strategic Technology Your Connected Car Your Connected Car Security Security Partner Partner TrustPoint
Security for V2X Communications ITS Canada Annual General Meeting May 1-4, 2016 Brian Romansky VP Strategic Technology Your Connected Car Your Connected Car Security Security Partner Partner TrustPoint
2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE
 Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Epipolar geometry-based ego-localization using an in-vehicle monocular camera
 Epipolar geometry-based ego-localization using an in-vehicle monocular camera Haruya Kyutoku 1, Yasutomo Kawanishi 1, Daisuke Deguchi 1, Ichiro Ide 1, Hiroshi Murase 1 1 : Nagoya University, Japan E-mail:
Epipolar geometry-based ego-localization using an in-vehicle monocular camera Haruya Kyutoku 1, Yasutomo Kawanishi 1, Daisuke Deguchi 1, Ichiro Ide 1, Hiroshi Murase 1 1 : Nagoya University, Japan E-mail:
ITS Wisconsin Transportation Conference October 23, 2018
 ITS Wisconsin Transportation Conference October 23, 2018 1 2 3 FACILITY HIGHLIGHTS Skidpad VDA Main Campus Handling Courses North Campus 7.5 Mile Oval 4 NORTH CAMPUS HIGHLIGHTS Emissions Laboratory Impact
ITS Wisconsin Transportation Conference October 23, 2018 1 2 3 FACILITY HIGHLIGHTS Skidpad VDA Main Campus Handling Courses North Campus 7.5 Mile Oval 4 NORTH CAMPUS HIGHLIGHTS Emissions Laboratory Impact
Mobile Millennium Using Smartphones as Traffic Sensors
 Mobile Millennium Using Smartphones as Traffic Sensors Dan Work and Alex Bayen Systems Engineering, Civil and Environmental Engineering, UC Berkeley Intelligent Infrastructure, Center for Information Technology
Mobile Millennium Using Smartphones as Traffic Sensors Dan Work and Alex Bayen Systems Engineering, Civil and Environmental Engineering, UC Berkeley Intelligent Infrastructure, Center for Information Technology
MAC + PHY Modeling & Multilayer Simulation of DSRC V2V Network
 MAC + PHY Modeling & Multilayer Simulation of DSRC V2V Network Cynthia Cudicini - MathWorks 2015 The MathWorks, Inc. 1 Vehicular Communications Vehicle-to-Vehicle (V2V) Vehicle-to-Infrastructure (V2I)
MAC + PHY Modeling & Multilayer Simulation of DSRC V2V Network Cynthia Cudicini - MathWorks 2015 The MathWorks, Inc. 1 Vehicular Communications Vehicle-to-Vehicle (V2V) Vehicle-to-Infrastructure (V2I)
Solid State LiDAR for Ubiquitous 3D Sensing
 April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
Commercial suas The Right Tool for the Right Job
 Commercial suas The Right Tool for the Right Job Presentation Objectives Overview of current data collection technologies UAS Systems Overview Surveyor 2.0 Project Case Study Mobile LiDAR & suas How Do
Commercial suas The Right Tool for the Right Job Presentation Objectives Overview of current data collection technologies UAS Systems Overview Surveyor 2.0 Project Case Study Mobile LiDAR & suas How Do
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
TomTom Innovation. Hans Aerts VP Software Development Business Unit Automotive November 2015
 TomTom Innovation Hans Aerts VP Software Development Business Unit Automotive November 2015 Empower Movement Simplify complex technology From A to BE Innovative solutions Maps Consumer Connect people and
TomTom Innovation Hans Aerts VP Software Development Business Unit Automotive November 2015 Empower Movement Simplify complex technology From A to BE Innovative solutions Maps Consumer Connect people and
Trimble VISION Positions from Pictures
 Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing
 for Remote Sensing") GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing www.inertiallabs.com 1 EVOLUTION OF REMOTE SENSING The latest progress in Remote sensing emerged more than 150 years ago, as balloonists took
GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing www.inertiallabs.com 1 EVOLUTION OF REMOTE SENSING The latest progress in Remote sensing emerged more than 150 years ago, as balloonists took
2. POINT CLOUD DATA PROCESSING
 Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
Examining future priorities for cyber security management
 Examining future priorities for cyber security management Cybersecurity Focus Day Insurance Telematics 16 Andrew Miller Chief Technical Officer Thatcham Research Owned by the major UK Motor Insurers with
Examining future priorities for cyber security management Cybersecurity Focus Day Insurance Telematics 16 Andrew Miller Chief Technical Officer Thatcham Research Owned by the major UK Motor Insurers with
Photogrammetry: A Modern Tool for Crash Scene Mapping
 Photogrammetry: A Modern Tool for Crash Scene Mapping Background A police accident investigator (AI) has many tasks when arriving at a crash scene. The officer s highest priority is public safety; the
Photogrammetry: A Modern Tool for Crash Scene Mapping Background A police accident investigator (AI) has many tasks when arriving at a crash scene. The officer s highest priority is public safety; the
inspiring innovative Infratech Jyväskylä infra3d unique simplify 12 May 2017 Manuel Dätwyler Product Management infra3d
 inspiring Infratech Jyväskylä infra3d 12 May 2017 Manuel Dätwyler Product Management infra3d simplify unique innovative What s the issue? «cost-intensive infrastructure management» 2 What are yours subjects
inspiring Infratech Jyväskylä infra3d 12 May 2017 Manuel Dätwyler Product Management infra3d simplify unique innovative What s the issue? «cost-intensive infrastructure management» 2 What are yours subjects
Real world data collecting tools. Company Introduction. C2L equipment.co,.ltd
 Company Introduction C2L equipment.co,.ltd www.c2l-equipment.com Company Status Business Areas Company name C2L equipment.co,.ltd Address CEO Unit 603, Samwhan HIPEX B, Pangyo Station RD 230, Bundang,
Company Introduction C2L equipment.co,.ltd www.c2l-equipment.com Company Status Business Areas Company name C2L equipment.co,.ltd Address CEO Unit 603, Samwhan HIPEX B, Pangyo Station RD 230, Bundang,
AI & Machine Learning
 AI & Machine Learning Application of Relevant Technologies for Indian Automotive Industry to address critical issues related to Road Safety Vinod Sood The Problem 5+ lakh accidents have occurred in 2015
AI & Machine Learning Application of Relevant Technologies for Indian Automotive Industry to address critical issues related to Road Safety Vinod Sood The Problem 5+ lakh accidents have occurred in 2015
+50,000 Archived GCPs. The Most Comprehensive Ground Control Points Solution. Make Geospatial Data More Accurate
 The Most Comprehensive Ground Control Points Solution Make Geospatial Data More Accurate +50,000 Archived GCPs www.compassdatainc.com +1 (303) 627-4058 solutions@compassdatainc.com HOW GCPs Are Created?
The Most Comprehensive Ground Control Points Solution Make Geospatial Data More Accurate +50,000 Archived GCPs www.compassdatainc.com +1 (303) 627-4058 solutions@compassdatainc.com HOW GCPs Are Created?
SHRP 2 Safety Research Symposium July 27, Site-Based Video System Design and Development: Research Plans and Issues
 SHRP 2 Safety Research Symposium July 27, 2007 Site-Based Video System Design and Development: Research Plans and Issues S09 Objectives Support SHRP2 program research questions: Establish crash surrogates
SHRP 2 Safety Research Symposium July 27, 2007 Site-Based Video System Design and Development: Research Plans and Issues S09 Objectives Support SHRP2 program research questions: Establish crash surrogates
a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018
 a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018 Abbreviations UAS Unmanned Aerial Systems LiDAR Light Detection and Ranging UAV Unmanned Aerial Vehicle RTK Real-time
a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018 Abbreviations UAS Unmanned Aerial Systems LiDAR Light Detection and Ranging UAV Unmanned Aerial Vehicle RTK Real-time
UAS Campus Survey Project
 ARTICLE STUDENTS CAPTURING SPATIAL INFORMATION NEEDS UAS Campus Survey Project Texas A&M University- Corpus Christi, home to the largest geomatics undergraduate programme in Texas, USA, is currently undergoing
ARTICLE STUDENTS CAPTURING SPATIAL INFORMATION NEEDS UAS Campus Survey Project Texas A&M University- Corpus Christi, home to the largest geomatics undergraduate programme in Texas, USA, is currently undergoing
Third Rock from the Sun
 Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
The Internet of Things
 The Internet of Things George Debbo Presentation for SASGI Meeting on 22 nd June 2016 1 Agenda What is IoT? How big is it? What effect does it have on telecom networks? Use cases/applications: The connected
The Internet of Things George Debbo Presentation for SASGI Meeting on 22 nd June 2016 1 Agenda What is IoT? How big is it? What effect does it have on telecom networks? Use cases/applications: The connected
Geospatial Engineering Problems & Solutions Associated With NDP Roads, Tunnelling & Civil Engineering Projects Use of HDS Leica Laser Scanners
 Geospatial Engineering Problems & Solutions Associated With NDP Roads, Tunnelling & Civil Engineering Projects Use of HDS Leica Laser Scanners Laser Scanning Laser Scanning is a method of collecting large
Geospatial Engineering Problems & Solutions Associated With NDP Roads, Tunnelling & Civil Engineering Projects Use of HDS Leica Laser Scanners Laser Scanning Laser Scanning is a method of collecting large
GNSS/INS for High Accuracy Mobile Mapping. Olaf Gross 11 th Terrasolid European User Event Kittilä, Finland
 GNSS/INS for High Accuracy Mobile Mapping Olaf Gross 11 th Terrasolid European User Event 15.02.2012 Kittilä, Finland IGI mbh Founded 1978 25 staff about half in R&D More than 380 customers in 60 different
GNSS/INS for High Accuracy Mobile Mapping Olaf Gross 11 th Terrasolid European User Event 15.02.2012 Kittilä, Finland IGI mbh Founded 1978 25 staff about half in R&D More than 380 customers in 60 different
Federica Zampa Sineco SpA V. le Isonzo, 14/1, Milan, 20135, Italy
 LYNX MOBILE MAPPER TM : THE NEW SURVEY TECHNOLOGY Federica Zampa Sineco SpA V. le Isonzo, 14/1, Milan, 20135, Italy federica.zampa@sineco.co.it Dario Conforti Optech Incorporated 300 Interchange Way, Vaughan,
LYNX MOBILE MAPPER TM : THE NEW SURVEY TECHNOLOGY Federica Zampa Sineco SpA V. le Isonzo, 14/1, Milan, 20135, Italy federica.zampa@sineco.co.it Dario Conforti Optech Incorporated 300 Interchange Way, Vaughan,
LOW COST ADVANCDED DRIVER ASSISTANCE SYSTEM (ADAS) DEVELOPMENT
 DEVELOPMENT") 2013 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM AUTONOMOUS GROUND SYSTEMS (AGS) MINI-SYMPOSIUM AUGUST 21-22, 2013 - TROY, MICHIGAN LOW COST ADVANCDED DRIVER ASSISTANCE SYSTEM (ADAS)
2013 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM AUTONOMOUS GROUND SYSTEMS (AGS) MINI-SYMPOSIUM AUGUST 21-22, 2013 - TROY, MICHIGAN LOW COST ADVANCDED DRIVER ASSISTANCE SYSTEM (ADAS)
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology. Maziana Muhamad
 Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
Vehicular Cloud Computing: A Survey. Lin Gu, Deze Zeng and Song Guo School of Computer Science and Engineering, The University of Aizu, Japan
 Vehicular Cloud Computing: A Survey Lin Gu, Deze Zeng and Song Guo School of Computer Science and Engineering, The University of Aizu, Japan OUTLINE OF TOPICS INTRODUCETION AND MOTIVATION TWO-TIER VEHICULAR
Vehicular Cloud Computing: A Survey Lin Gu, Deze Zeng and Song Guo School of Computer Science and Engineering, The University of Aizu, Japan OUTLINE OF TOPICS INTRODUCETION AND MOTIVATION TWO-TIER VEHICULAR
Construction Survey GIS. Doug Kotnik, GISP
 Construction Survey GIS Doug Kotnik, GISP Construction Survey GIS Sales Service Rentals Training Support Products & Services Authorized Dealer Trimble, Spectra Precision, Nikon, & Ashtech Authorized Warranty
Construction Survey GIS Doug Kotnik, GISP Construction Survey GIS Sales Service Rentals Training Support Products & Services Authorized Dealer Trimble, Spectra Precision, Nikon, & Ashtech Authorized Warranty
A New Way to Control Mobile LiDAR Data
 A New Way to Control Mobile LiDAR Data Survey control has always been a critically important issue when conducting mobile LiDAR surveys. While the accuracies currently being achieved with the most capable
A New Way to Control Mobile LiDAR Data Survey control has always been a critically important issue when conducting mobile LiDAR surveys. While the accuracies currently being achieved with the most capable
Autorama, Connecting Your Car to
 Autorama, Connecting Your Car to the Internet of Tomorrow Nicholas Sargologos, Senior Marketing Manager, Digital Networking Freescale Semiconductor Overview Automotive OEMs need a secure, managed process
Autorama, Connecting Your Car to the Internet of Tomorrow Nicholas Sargologos, Senior Marketing Manager, Digital Networking Freescale Semiconductor Overview Automotive OEMs need a secure, managed process
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps
 OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
A. SERVEL. EuCNC Special Sessions 5G connected car 01/07/2015
 A. SERVEL EuCNC 2015 - Special Sessions 5G connected car 01/07/2015 Connected cars, a reality since 12 years for our customers! 2003 A Pioneer for emergency 1.6 million of equipped vehicles 2006 One of
A. SERVEL EuCNC 2015 - Special Sessions 5G connected car 01/07/2015 Connected cars, a reality since 12 years for our customers! 2003 A Pioneer for emergency 1.6 million of equipped vehicles 2006 One of
Sensory Augmentation for Increased Awareness of Driving Environment
 Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Sensory Augmentation for Increased Awareness of Driving Environment Pranay Agrawal John M. Dolan Dec. 12, 2014 Technologies for Safe and Efficient Transportation (T-SET) UTC The Robotics Institute Carnegie
Perspective Sensing for Inertial Stabilization
 Perspective Sensing for Inertial Stabilization Dr. Bernard A. Schnaufer Jeremy Nadke Advanced Technology Center Rockwell Collins, Inc. Cedar Rapids, IA Agenda Rockwell Collins & the Advanced Technology
Perspective Sensing for Inertial Stabilization Dr. Bernard A. Schnaufer Jeremy Nadke Advanced Technology Center Rockwell Collins, Inc. Cedar Rapids, IA Agenda Rockwell Collins & the Advanced Technology
2/19/2018. Who are we? Who am I? What is Scanning? How does scanning work? How does scanning work? Scanning for Today s Surveyors
 2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
Trimble Mobile Mapping Portfolio
 Jörg Amend Sales Account Manager SEPTEMBER 20 2017 Trimble Mobile Mapping Portfolio Current challenges and trends Multible Sensors connecting to one Echosystem Trimble RealWorks Trimble Edgewise TBC Pathfinder
Jörg Amend Sales Account Manager SEPTEMBER 20 2017 Trimble Mobile Mapping Portfolio Current challenges and trends Multible Sensors connecting to one Echosystem Trimble RealWorks Trimble Edgewise TBC Pathfinder
Leica ALS70. Airborne Laser Scanners Performance for diverse Applications
 Leica ALS70 Airborne Laser Scanners Performance for diverse Applications Three Models, One Result. Highest Productivity in all Applications. Imagine an affordable 500 khz pulse rate city-mapping LIDAR
Leica ALS70 Airborne Laser Scanners Performance for diverse Applications Three Models, One Result. Highest Productivity in all Applications. Imagine an affordable 500 khz pulse rate city-mapping LIDAR
Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell
 Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell 11 th Oct 2018 2 Contents Our Vision Of Smarter Transport Company introduction and journey so far Advanced
Transforming Transport Infrastructure with GPU- Accelerated Machine Learning Yang Lu and Shaun Howell 11 th Oct 2018 2 Contents Our Vision Of Smarter Transport Company introduction and journey so far Advanced
Dedicated Short Range Communication: What, Why and How?
 Dedicated Short Range Communication: What, Why and How? Imran Hayee EE Department, University of Minnesota Duluth Connected Vehicles Research Lab (http://www.d.umn.edu/ee/cvrl/index.html) Outline Background
Dedicated Short Range Communication: What, Why and How? Imran Hayee EE Department, University of Minnesota Duluth Connected Vehicles Research Lab (http://www.d.umn.edu/ee/cvrl/index.html) Outline Background
> Acoustical feedback in the form of a beep with increasing urgency with decreasing distance to an obstacle
 PARKING ASSIST TESTING THE MEASURABLE DIFFERENCE. > Creation of complex 2-dimensional objects > Online distance calculations between moving and stationary objects > Creation of Automatic Points of Interest
PARKING ASSIST TESTING THE MEASURABLE DIFFERENCE. > Creation of complex 2-dimensional objects > Online distance calculations between moving and stationary objects > Creation of Automatic Points of Interest
Lidar-based Transport Research
 Lidar-based Transport Research Juha Hyyppä Antero Kukko, Anttoni Jaakkola (Gaze Inc), Harri Kaartinen, Xiaowei Yu Paikkatietokeskus Hannu Hyyppä, Matti Vaaja, Aalto Centre of Excellence in Laser Scanning
Lidar-based Transport Research Juha Hyyppä Antero Kukko, Anttoni Jaakkola (Gaze Inc), Harri Kaartinen, Xiaowei Yu Paikkatietokeskus Hannu Hyyppä, Matti Vaaja, Aalto Centre of Excellence in Laser Scanning
Mobile mapping system and computing methods for modelling of road environment
 Mobile mapping system and computing methods for modelling of road environment Antero Kukko, Anttoni Jaakkola, Matti Lehtomäki, Harri Kaartinen Department of Remote Sensing and Photogrammetry Finnish Geodetic
Mobile mapping system and computing methods for modelling of road environment Antero Kukko, Anttoni Jaakkola, Matti Lehtomäki, Harri Kaartinen Department of Remote Sensing and Photogrammetry Finnish Geodetic
Best Practices for Surveying and Mapping Roadways and Intersections for Connected Vehicle Applications
 Best Practices for Surveying and Mapping Roadways and Intersections for Connected Vehicle Applications Sponsor: Connected Vehicle Pooled Fund Study Written by: J. A. Farrell, M. Todd, and M. Barth Department
Best Practices for Surveying and Mapping Roadways and Intersections for Connected Vehicle Applications Sponsor: Connected Vehicle Pooled Fund Study Written by: J. A. Farrell, M. Todd, and M. Barth Department
3D LIDAR Point Cloud based Intersection Recognition for Autonomous Driving
 3D LIDAR Point Cloud based Intersection Recognition for Autonomous Driving Quanwen Zhu, Long Chen, Qingquan Li, Ming Li, Andreas Nüchter and Jian Wang Abstract Finding road intersections in advance is
3D LIDAR Point Cloud based Intersection Recognition for Autonomous Driving Quanwen Zhu, Long Chen, Qingquan Li, Ming Li, Andreas Nüchter and Jian Wang Abstract Finding road intersections in advance is
Virginia Connected Corridor
 Virginia Connected Corridor NATMEC 2016 Mike Mollenhauer Director, Center for Technology Implementation Virginia Tech Transportation Institute 5/4/2016 Virginia Connected Corridor In 2014, VDOT and VTTI
Virginia Connected Corridor NATMEC 2016 Mike Mollenhauer Director, Center for Technology Implementation Virginia Tech Transportation Institute 5/4/2016 Virginia Connected Corridor In 2014, VDOT and VTTI
Enabling The Connected Car Revolution
 Revolution Bill McKinley Automotive Solutions MWC 2017 Bill McKinley Automotive Solutions 1885, Karl Benz invented the automobile Later that year, he took it out for the first public test drive and --
Revolution Bill McKinley Automotive Solutions MWC 2017 Bill McKinley Automotive Solutions 1885, Karl Benz invented the automobile Later that year, he took it out for the first public test drive and --