CS664 Lecture #16: Image registration, robust statistics, motion
|
|
|
- Giles Rose
- 5 years ago
- Views:
Transcription
1 CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU Xenios Papademetris pt Rick Szeliski, Microsoft Research Steve Seitz, University of Washington
2 Announcements Next quiz: 10/25 (Tuesday) Coverage through last lecture 1-page paper report due on 11/15 PS2 out later today, due on Tuesday 11/8 Experiment with energy minimization 2




3 Next topic: Image registration Origins in aerial surveillance Now available with any digital camera = 3

4 Another example 4
5 Registration algorithms Consider many different translations τ of image I 2 Compare τ(i 2 ) with I 1 Issues: Are translations enough? Right image comparison function (dist)? 5



6 Beyond translations Translation Affine Perspective 2 unknowns 6 unknowns 8 unknowns 6









7 Affine registration in action
8 Algorithms to compare images We need a way to compare two images A common problem in vision (and beyond) Depends on what changes you expect to see between similar images Alternative: color histograms Compute vector for each image, use L 2 distance on this vector No spatial information There are papers on how to fix this Widely used in image databases 8
9 What if the cameras differ? Suppose one camera is twice as bright as the other, or some such We know how to do this already Mutual information is widely used in medical imaging for registration Not quite the right thing, for various reasons Allows arbitrary intensity mapping Maximized by gradient descent Usually combined with a complicated non-rigid registration scheme (think: splines) 9

10 Non-rigid registration example 10
11 Local matching Image restration algorithms can also be used to compute dense stereo or motion Locally at each pixel, take a square window and register it w.r.t. the other image If we assume only translations, this is fast Especially in stereo, where we can often assume purely horizontal translations Natural generalization to handle geometric distortions (rotations, foreshortening, etc.) Usually we consider affine transformations Used for many real-time systems 11
12 What else can go wrong? Some things that are present in one image will not be present in the other! Obviously happens where the registered images do not overlap Easier to think about inside the image Imagine a person who is present in one image but not in the other, or who just moves a bit What does this do to the L 2 distance? How can we fix it? 12
13 General model fitting problem We have some data points (x i, y i ) and some possible models, each of which has some parameters θ Example: line fitting, y = mx + b A model predicts M(x;θ) What set of parameters gives the best fit to the data? For a particular θ, the residuals are 13
14 Least squares fit The least squares fit says that the best fit minimizes i r i 2 Sum of the squared residuals At the correct alignment of the two images, what are the residuals? If the only change between images is camera noise, they are generally small Think about the joint histogram What if a person moves? Same issue arises in line fitting! 14
15 1 bad point can ruin your whole line Example c/o Kim Boyer, OSU 15
16 Problem is subtle You can t simply do an LS fit and then declare the worst-fitting point to be bad There are examples where the bad data is fit better than the good data Robust statistics addresses this problem Data is outliers and inliers A robust fitting method tolerates outliers Obviously, LS is not robust Note that in vision, the term robust sometimes simply means good 16
17 Robust model fitting There are two problems with the LS fit We square the residuals We sum up these squares The main approaches in robust statistics address each of these problems The problem with squaring the residuals is that the squared values get too large I.e., we will never allow intensity 0 to turn into intensity 255; instead, we ll prefer a translation where every pixel is off by by 25 (50x50 image) We saw this problem in lecture 7 or so 17
18 M-estimation Suppose that our measure of goodness of fit is i ρ(r i ), where Here, s is a scale parameter All residuals worse than s count like s The scale parameter essentially controls the boundary between inliers and outliers We expect outliers to have residuals larger than s, but not inliers How do we pick s? 18
CS664 Lecture #18: Motion
 CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry
 CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Optimization and least squares. Prof. Noah Snavely CS1114
 Optimization and least squares Prof. Noah Snavely CS1114 http://cs1114.cs.cornell.edu Administrivia A5 Part 1 due tomorrow by 5pm (please sign up for a demo slot) Part 2 will be due in two weeks (4/17)
Optimization and least squares Prof. Noah Snavely CS1114 http://cs1114.cs.cornell.edu Administrivia A5 Part 1 due tomorrow by 5pm (please sign up for a demo slot) Part 2 will be due in two weeks (4/17)
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski
 with a lot of slides stolen from Steve Seitz and Rick Szeliski") Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Prof. Noah Snavely CS Administrivia. A4 due on Friday (please sign up for demo slots)
") Robust fitting Prof. Noah Snavely CS111 http://www.cs.cornell.edu/courses/cs111 Administrivia A due on Friday (please sign up for demo slots) A5 will be out soon Prelim is coming up, Tuesday, / Roadmap
Robust fitting Prof. Noah Snavely CS111 http://www.cs.cornell.edu/courses/cs111 Administrivia A due on Friday (please sign up for demo slots) A5 will be out soon Prelim is coming up, Tuesday, / Roadmap
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II
 Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II Handed out: 001 Nov. 30th Due on: 001 Dec. 10th Problem 1: (a (b Interior
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II Handed out: 001 Nov. 30th Due on: 001 Dec. 10th Problem 1: (a (b Interior
CS664 Lecture #21: SIFT, object recognition, dynamic programming
 CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Feature Matching and RANSAC
 Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
The Lucas & Kanade Algorithm
 The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Automatic Image Alignment
 Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Lecture 13 Theory of Registration. ch. 10 of Insight into Images edited by Terry Yoo, et al. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 13 Theory of Registration ch. 10 of Insight into Images edited by Terry Yoo, et al. Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 13 Theory of Registration ch. 10 of Insight into Images edited by Terry Yoo, et al. Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Image Registration Lecture 4: First Examples
 Image Registration Lecture 4: First Examples Prof. Charlene Tsai Outline Example Intensity-based registration SSD error function Image mapping Function minimization: Gradient descent Derivative calculation
Image Registration Lecture 4: First Examples Prof. Charlene Tsai Outline Example Intensity-based registration SSD error function Image mapping Function minimization: Gradient descent Derivative calculation
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Tracking Computer Vision Spring 2018, Lecture 24
 Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Overview. Video. Overview 4/7/2008. Optical flow. Why estimate motion? Motion estimation: Optical flow. Motion Magnification Colorization.
 Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Lecture 20: Tracking. Tuesday, Nov 27
 Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Generalized Hough Transform, line fitting
 Generalized Hough Transform, line fitting Introduction to Computer Vision CSE 152 Lecture 11-a Announcements Assignment 2: Due today Midterm: Thursday, May 10 in class Non-maximum suppression For every
Generalized Hough Transform, line fitting Introduction to Computer Vision CSE 152 Lecture 11-a Announcements Assignment 2: Due today Midterm: Thursday, May 10 in class Non-maximum suppression For every
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Photo by Carl Warner
 Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Recall: Derivative of Gaussian Filter. Lecture 7: Correspondence Matching. Observe and Generalize. Observe and Generalize. Observe and Generalize
 Recall: Derivative of Gaussian Filter G x I x =di(x,y)/dx Lecture 7: Correspondence Matching Reading: T&V Section 7.2 I(x,y) G y convolve convolve I y =di(x,y)/dy Observe and Generalize Derivative of Gaussian
Recall: Derivative of Gaussian Filter G x I x =di(x,y)/dx Lecture 7: Correspondence Matching Reading: T&V Section 7.2 I(x,y) G y convolve convolve I y =di(x,y)/dy Observe and Generalize Derivative of Gaussian
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Image Warping. Many slides from Alyosha Efros + Steve Seitz. Photo by Sean Carroll
 Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Multiple Model Estimation : The EM Algorithm & Applications
 Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Dec. 4, 2008 Harpreet S. Sawhney hsawhney@sarnoff.com Plan IBR / Rendering applications of motion / pose
Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Dec. 4, 2008 Harpreet S. Sawhney hsawhney@sarnoff.com Plan IBR / Rendering applications of motion / pose
Template Matching Rigid Motion
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Multiple Model Estimation : The EM Algorithm & Applications
 Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Nov. 13, 2007 Harpreet S. Sawhney hsawhney@sarnoff.com Recapitulation Problem of motion estimation Parametric
Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Nov. 13, 2007 Harpreet S. Sawhney hsawhney@sarnoff.com Recapitulation Problem of motion estimation Parametric
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Fast Image Registration via Joint Gradient Maximization: Application to Multi-Modal Data
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Fast Image Registration via Joint Gradient Maximization: Application to Multi-Modal Data Xue Mei, Fatih Porikli TR-19 September Abstract We
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Fast Image Registration via Joint Gradient Maximization: Application to Multi-Modal Data Xue Mei, Fatih Porikli TR-19 September Abstract We
Template Matching Rigid Motion. Find transformation to align two images. Focus on geometric features
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Robust Realignment of fmri Time Series Data
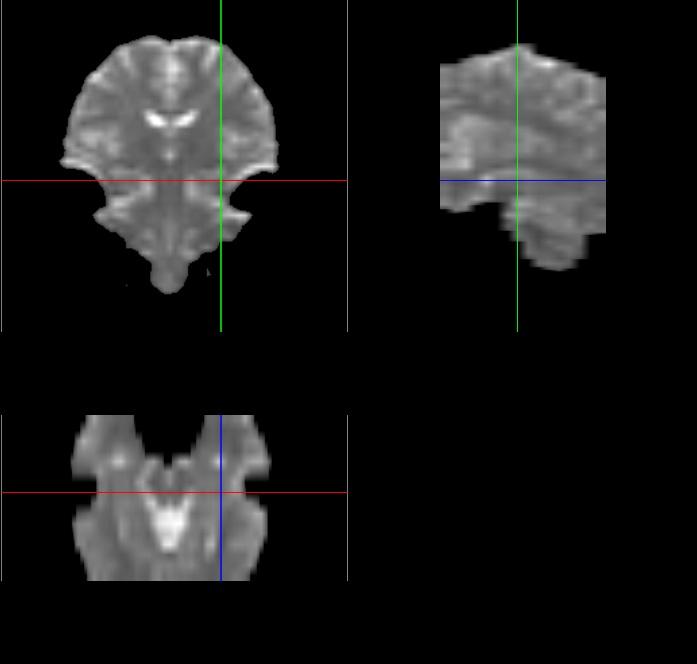
 Robust Realignment of fmri Time Series Data Ben Dodson bjdodson@stanford.edu Olafur Gudmundsson olafurg@stanford.edu December 12, 2008 Abstract FMRI data has become an increasingly popular source for exploring
Robust Realignment of fmri Time Series Data Ben Dodson bjdodson@stanford.edu Olafur Gudmundsson olafurg@stanford.edu December 12, 2008 Abstract FMRI data has become an increasingly popular source for exploring
RIGID IMAGE REGISTRATION
 RIGID IMAGE REGISTRATION Duygu Tosun-Turgut, Ph.D. Center for Imaging of Neurodegenerative Diseases Department of Radiology and Biomedical Imaging duygu.tosun@ucsf.edu What is registration? Image registration
RIGID IMAGE REGISTRATION Duygu Tosun-Turgut, Ph.D. Center for Imaging of Neurodegenerative Diseases Department of Radiology and Biomedical Imaging duygu.tosun@ucsf.edu What is registration? Image registration
Image Analysis. Rasmus R. Paulsen DTU Compute. DTU Compute
 Rasmus R. Paulsen rapa@dtu.dk http://www.compute.dtu.dk/courses/02502 Plenty of slides adapted from Thomas Moeslunds lectures Lecture 8 Geometric Transformation 2, Technical University of Denmark What
Rasmus R. Paulsen rapa@dtu.dk http://www.compute.dtu.dk/courses/02502 Plenty of slides adapted from Thomas Moeslunds lectures Lecture 8 Geometric Transformation 2, Technical University of Denmark What
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Data Term. Michael Bleyer LVA Stereo Vision
 Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
CS 534: Computer Vision 3D Model-based recognition
 CS 534: Computer Vision 3D Model-based recognition Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 3D Model-based Vision - 1 Outlines Geometric Model-Based Object Recognition Choosing features
CS 534: Computer Vision 3D Model-based recognition Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 3D Model-based Vision - 1 Outlines Geometric Model-Based Object Recognition Choosing features
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
Robust Regression. Robust Data Mining Techniques By Boonyakorn Jantaranuson
 Robust Regression Robust Data Mining Techniques By Boonyakorn Jantaranuson Outline Introduction OLS and important terminology Least Median of Squares (LMedS) M-estimator Penalized least squares What is
Robust Regression Robust Data Mining Techniques By Boonyakorn Jantaranuson Outline Introduction OLS and important terminology Least Median of Squares (LMedS) M-estimator Penalized least squares What is
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Global Flow Estimation. Lecture 9
 Motion Models Image Transformations to relate two images 3D Rigid motion Perspective & Orthographic Transformation Planar Scene Assumption Transformations Translation Rotation Rigid Affine Homography Pseudo
Motion Models Image Transformations to relate two images 3D Rigid motion Perspective & Orthographic Transformation Planar Scene Assumption Transformations Translation Rotation Rigid Affine Homography Pseudo
Optical Flow-Based Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Image stitching. Announcements. Outline. Image stitching
 Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Some material taken from: Yuri Boykov, Western Ontario
 CS664 Lecture #22: Distance transforms, Hausdorff matching, flexible models Some material taken from: Yuri Boykov, Western Ontario Announcements The SIFT demo toolkit is available from http://www.evolution.com/product/oem/d
CS664 Lecture #22: Distance transforms, Hausdorff matching, flexible models Some material taken from: Yuri Boykov, Western Ontario Announcements The SIFT demo toolkit is available from http://www.evolution.com/product/oem/d
Particle Filtering. CS6240 Multimedia Analysis. Leow Wee Kheng. Department of Computer Science School of Computing National University of Singapore
 Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Math in image processing
 Math in image processing Math in image processing Nyquist theorem Math in image processing Discrete Fourier Transformation Math in image processing Image enhancement: scaling Math in image processing Image
Math in image processing Math in image processing Nyquist theorem Math in image processing Discrete Fourier Transformation Math in image processing Image enhancement: scaling Math in image processing Image
Geometric Transformations and Image Warping
 Geometric Transformations and Image Warping Ross Whitaker SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2009 1 Geometric Transformations Greyscale transformations -> operate
Geometric Transformations and Image Warping Ross Whitaker SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2009 1 Geometric Transformations Greyscale transformations -> operate
CHAPTER 9. Classification Scheme Using Modified Photometric. Stereo and 2D Spectra Comparison
 CHAPTER 9 Classification Scheme Using Modified Photometric Stereo and 2D Spectra Comparison 9.1. Introduction In Chapter 8, even we combine more feature spaces and more feature generators, we note that
CHAPTER 9 Classification Scheme Using Modified Photometric Stereo and 2D Spectra Comparison 9.1. Introduction In Chapter 8, even we combine more feature spaces and more feature generators, we note that
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik