arxiv: v1 [cs.cv] 15 Oct 2018
|
|
|
- Jonathan Melton
- 5 years ago
- Views:
Transcription
1 Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499, Republic of Korea 2 Department of Data Science, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499, Republic of Korea arxiv: v1 [cs.cv] 15 Oct 2018 Abstract Many recent object detection algorithms use the bounding box regressor to predict the position coordinates of an object (i.e., to predict four continuous variables of an objects bounding box information). To improve object detection accuracy, we propose four types of object boundary segmentation masks that provide position information in a different manner than that done by object detection algorithms. Additionally, we investigated the effect of the proposed object bounding shape masks on instance segmentation. To evaluate the proposed masks, our method adds a proposed bounding shape (or box) mask to extend the Faster R-CNN framework; we call this Bounding Shape (or Box) Mask R-CNN. We experimentally verified its performance with two benchmark datasets, MS COCO and Cityscapes. The results indicate that our proposed models generally outperform Faster R-CNN and Mask R-CNN. Introduction Object detection and instance segmentation are crucial tasks in computer vision. Object detection determines the class of each object instance and the location of each object instance in an image. Deep learning-based object detection approaches have recently achieved notable success, such as the Overfeat (Sermanet et al. 2013), Fast R-CNN (Girshick 2015),and Faster R-CNN (Ren et al. 2015) models. In addition, convolutional neural network (CNN) algorithms such as instance segmentation, combining object detection with semantic segmentation, used to predict to which class in the image each pixel (px) belongs to, have been actively studied (He et al. 2017; Dai, He, and Sun 2016; Dai et al. 2016). However, to apply these object recognition algorithms to real-world applications, many problems such as improving the performance and reducing the computational cost still need to be addressed. Many recent object detection algorithms, including the object detection representative method Faster R-CNN, comprise a classifier for the object class and a bounding box regressor for predicting the locations of object instances. Bounding box regressors are not easy to predict from the four-dimensional continuous variables (x-coordinate, y- coordinate, width, and height) in images. Teaching the network with more information to predict a bounding box will improve object detection performance. Mask R-CNN (He et al. 2017) improves the accuracy of bounding box prediction by adding object mask information to Faster R-CNN. Therefore, the performance of object detection will be improved by also teaching the boundary information of the object in the form of a mask. We define bounding shape masks and bounding box masks as shown in Figure 1. We propose a method to improve bounding box prediction accuracy by adding a bounding shape mask branch to the Faster R-CNN framework. This method will be called bounding shape mask R-CNN (BshapeMask). We also study the effect of instance segmentation on bounding shape masks using only object boundary information, unlike the instance segmentation branch of Mask R-CNN. Figure 2 shows the proposed framework. Similarly, we call the framework that adds a bounding box mask to the Faster R-CNN framework the bounding box mask R-CNN (BboxMask). In this study, we used four masks, Thick bounding shape mask (Figure 1 (b)), Scored bounding shape mask (Figure 1 (c)), Thick bounding box mask (Figure 1 (f)), and Scored bounding box mask (Figure 1 (g)) instead of Figure 1 (a) and (e) and the models using each mask are called Thick Bshape- Mask, Scored BshapeMask, Thick BboxMask, and Scored BboxMask, respectively. Also, as shown in Figure 1 (d) and (h), various thickness masks were used to evaluate the accuracy according to the object boundary thickness. More details are given in Section Bounding Shape Mask R-CNN. As in the proposed framework, the model not only learns the coordinate information of the bounding box through the bounding box regressor branch, but also learns the bounding box information expressed in a different way, which is the boundary information of object instances. Therefore, the conjecture of this study is that BshapeMask will improve bounding box prediction accuracy because it provides various information about the bounding box. The Thick bounding shape (or box) mask branch is used to perform pixel-wise binary classification to detect object boundaries because the thick boundary of the object is filled with 1s, while objects inside and the background are filled with 0s. On the other hand, the Scored bounding shape (or box) mask branch performs pixel-wise regression because the thick boundary of the object is filled with various continuous values. Furthermore, we think it is more effective to use a Scored bounding shape mask than a Thick bounding shape
 bounding shape mask 0 0 0 0 0 0 0 0")
2 (a) bounding shape mask (b) Thick bounding shape mask (c) Scored bounding shape mask k pixel (d) k-px bounding shape mask k pixel (e) bounding box mask (f) Thick bounding box mask (g) Scored bounding box mask (h) k-px bounding box mask Figure 1: Our proposed bounding shape masks and bounding box masks. We used four thick boundary masks, which are those shown in (b), (c), (f), and (g) instead of (a) and (e) as a training issue. As in (d) and (h), varied-thickness masks were used to evaluate the accuracy achieved based on the object boundary thickness. mask that uses the same value without distinguishing true boundaries from false boundaries by thickening the boundary. In addition, because edge or contour information is important to distinguish objects from background, we think that using a bounding shape mask rather than a bounding box mask will help to improve bounding box prediction accuracy. We also believe that the proposed model will help improve instance segmentation performance. Because the boundary of an object is the criterion for dividing foreground and background, we assumed that the pixels near the boundary of the object are important information in distinguishing objects. We also think that the proposed model can learn more effectively than if learning all objects by focusing on learning the boundaries of objects. To evaluate the proposed approaches, MS COCO (Lin et al. 2014) and the Cityscapes (Cordts et al. 2016) datasets were used. The BboxMask and BshapeMask results are presented to compare the effects of applying a bounding box mask and a bounding shape mask. We extended the boundaries of the object shape for training and experimented to make the true boundary thicker by various pixel amounts (3 11 pixels) to evaluate how thick it should be. Finally, we compared thick BshapeMask (BboxMask) and scored BshapeMask (BboxMask) to analyze the effect of a scored bounding shape (or box) mask. As a result, Scored BshapeMask had the highest performance for both benchmark datasets. This result also surpasses the performances of Faster R-CNN and Mask R-CNN in (He et al. 2017). Realated Work Object Detection In recent years, many studies have shown excellent performance in object detection (Liu et al. 2016; Ren et al. 2015; Redmon et al. 2016). Remarkable development of object detection began with Overfeat and region-based convolution neural network (R-CNN) (Girshick et al. 2014) approaches which are deep CNN-based models. In particular, the R-CNN methodology proposed in 2014 remains outstanding. Unlike Overfeat (e.g., sliding-window detection algorithms), R-CNN selects proposals including objects and classifies objects using the selected proposals. To solve the heavy calculations of R-CNN, Fast R-CNN and Faster R- CNN were developed. Fast R-CNN uses the selective search (Uijlings et al. 2013) using CNN s feature map. Fast R-CNN uses a Region of Interest (RoI) pooling layer (Girshick 2015) to eliminate repeatedly feeding RoIs back into the CNN. Faster R-CNN uses Region Proposal Networks (RPNs) (Ren et al. 2015) to detect RoIs in the structure of Fast R-CNN. YOLO (Redmon et al. 2016) and SSD (Liu et al. 2016) have no additional network to detect RoIs and perform object proposal and object detection simultaneously and have advantages of reduced calculation and fast inference time. Instance segmentation Instance segmentation is instance-wise semantic segmentation and a segmentation approach to classify a single mask based on a proposal object. DeepMask (Pinheiro, Collobert, and Dollár 2015) predicts where an object exists by segmenting an object to propose candidates. Dai et al. (2016) proposed a cascading stage model using a shared feature map to segment proposed instance(s) from a bounding box. Fully convolutional instance-aware semantic segmentation (FCIS) (Li et al. 2016) used the relative position of a feature through the position-sensitive score map using an improvement (Dai et al. 2016) for the instance segmentation. FCIS simultaneously predicts the bounding box and mask, but FCIS has a systemic error with overlapping objects and only roughly detects the bounding of objects. Mask R-CNN uses an elaborate instance segmentation result. This model uses RoIAlign (He et al. 2017) to obtain precise RoIs and uses them together with three branches (classification, bounding box detection, and segmentation) to achieve good performance. These methods focus on the inside of the proposal
, RCN (a classifier and a bounding box regressor), and FCN (a bounding shape segmentor). object for instance segmentation.")
3 Figure 2: Bounding Mask R-CNN Framework, named BshapeMask. We extend Faster R-CNN by adding a bounding shape mask branch. The BshapeMask consists of RPN (a classifier and a bounding box regressor), RCN (a classifier and a bounding box regressor), and FCN (a bounding shape segmentor). object for instance segmentation. In contrast, we study the edges of objects (information that distinguish between foreground and background). Bounding Shape Mask R-CNN Bounding Shape (or Box) Mask Representation As mentioned in the Introduction, we define bounding shape masks and bounding box masks to make the position information of the bounding box of an object different from the coordinate information, as shown in Figure 1. In the first row of Figure 1, we define the object s boundary with various masks, and we define the object s bounding box with other masks in the second row. Except for the object boundary and bounding box information, we define the masks in the same way, so we explain them using the bounding shape mask example. As shown in Figure 1 (a), the raw boundary shape mask consists of only a one-pixel width true object boundary. But in this case, the amount of information is too low and learning is difficult. Thus, we use a thicker boundary using several pixels, as in Figure1 (b) and (c); we defined the thicker boundary by stretching the boundaries inside and outside of the true boundary. As seen in Figure 1 (d) and (h), both the k-px Thick bounding shape (or box) mask and the k-px Scored bounding shape (or box) mask are the extend both the inside and outside of the true boundary by k pixels, so the thickness of the boundary is 2k + 1. However, the way the boundary is expanded is different. We call expanded boundaries false boundary pixels because they are not real boundary pixels. In the Thick bounding shape mask, false boundary pixels are filled with 1s, which is the same as for true boundary pixels. The mathematical expression of this mask is as follows. Let M = (m ij ) R v w be a true boundary mask matrix, B = {(i, j) : m ij = 1, 1 i v, 1 j w} is a true boundary index set, and X = (x pq ) R v w is a k-px Thick bounding shape (or box) mask matrix. For (i, j) B, { xpj = 1, if 1 i k p i + k v (1) x iq = 1, if 1 j k q j + k w. All remaining values are filled with zeros. In this case, it is difficult to distinguish between the false boundary and true boundary, so we propose the Scored bounding shape mask because we can learn boundaries more effectively by defining false boundary and true boundary values differently. The value of the false boundary is reduced at a constant rate in proportion to the distance from the actual boundary. Thus, for the Scored bounding shape mask, false boundary pixels are filled with distance-based scored numbers, which are positive numbers less than 1, to generate a mask. Let Y = (y pq ) R v w be a k-px Scored bounding shape (or box) mask matrix. We use the same matrices M and B as Eq.(1)), and s is a predetermined positive constant (less than 1) that controls the magnitude by which the value decreases. Then for (i, j) B, { ypj = 1 d 1 s, if 1 i k p i + k v (2) y iq = 1 d 2 s, if 1 j k q j + k w, where d 1 = p i and d 2 = q j are the distance from the true boundary, and the remaining values are filled with zeros. We set s as Framework The BshapeMask is a framework which combines Faster R- CNN with a bounding shape mask branch. Specifically, we use a bounding shape mask branch instead of the instance segmentation mask branch in Mask R-CNN. As shown in Figure 2, our proposed network consists of a convolutional backbone network (a feature extractor), the RPN, RCN, and the bounding box branch based on FCN (?). In the backbone, we use the Feature Pyramid Network (FPN) (Lin et al. 2017) to improve detection accuracy. The BshapeMask flow is as follows. First, the CNN extracts feature maps from an image. We use ResNet50 or ResNet101 as this backbone. FPN combines feature maps in each layer of the CNN except the first layer and forwards combined feature maps to the RPN. The RPNs two branches (classifier and bounding box regressor), propose the RoIs. Objects are detected using the RoIs through the RCN. The boundary (or box) mask branch, which is also the object boundary segmentor, uses
4 RoIs at the same time as the RCN. Through this process, object boundaries are segmented, and the architecture of the FCN used in this branch has the same architecture as the Mask R-CNN. BboxMask uses the same framework except that it uses a bounding box mask branch. Training BshapeMask/BboxMask The loss function is the same in both BshapeMask and BboxMask. Therefore, we describe it with BshapeMask. However, the Thick model and the Scored model have different losses. The Thick BshapeMask is trained using three losses, which are L RP N, L RCN, and L T mask, from the three branches (RPN, RCN and Thick bounding shape mask branch, respectively). Scored BshapeMask uses L Smask, the Scored bounding shape mask loss, instead of L T mask. Our total loss function for training our proposed model, Thick BshapeMask, is defined as follows: Loss total = αl RP N + βl RCN + γl T mask, (3) where α, β, and γ are predetermined positive constants and losses of RPN and RCN and are the same as those for Faster R-CNN. The total loss of Scored BshapeMask uses L Smask instead of L T mask. Because the ground-truth only consists of 0 and 1 in the Thick bounding shape (or box) mask, it is a pixel-wise binary classification problem. Thus, we use the binary crossentropy loss and Thick bounding shape mask loss for each RoI as follows: L T mask = 1 W H HW i j {t ij log ˆt ij + (1 t ij ) log(1 ˆt ij )}, where t ij is the ground-truth label of the mask and the predicted value is ˆt ij, and H and W indicate the height and width of the mask, respectively. The ground-truth values of the Scored bounding shape mask have continuous values from 0 to 1. Thus, Scored BshapeMask and Scored BboxMask solve the pixel-wise regression problem while Thick BshapeMask and Thick BboxMask solve a pixel-wise classification problem. Thus, we use the Euclidean loss with the same notation as L T mask as follows: L Smask = 1 W H 2HW i j (t ij ˆt ij ) 2. Post-processing Post-processing is required for instance segmentation, because our proposed bounding shape masks only segment boundaries of objects. We performed post-processing of the two-step procedures. The first step is to connect the predicted boundary and fill it. To connect and fill the interior of the predicted mask, we used a modified Prims algorithm (Prim 1957), which is one of the techniques used in the Minimum Spanning Tree. The second step is the process of reducing the thickness of the outer and inner boundaries. For this, we use the fully connected CRFs-based mean field approximation (Krähenbühl and Koltun 2011). Experiment We experimented to investigate the following three topics. The first was to identify which of the proposed masks is most effective. The second was to study if the bounding box prediction performance improves by adding the proposed mask to Faster R-CNN. Finally, we evaluated whether the proposed model improves the performance of instance segmentation when the model learns only the boundary of the object, not the entire object. To verify our proposed methods, we used two benchmark datasets, MS COCO and Cityscapes. For each dataset, we compared bounding box prediction and instance segmentation prediction performance for the four proposed models (Thick BshapeMask, Scored BshapeMask, Thick BboxMask, and Scored Bbox- Mask) using various boundary thicknesses. In addition, to evaluate the performance of the bounding shape (or box) masks, we compared the results of the proposed model with Faster R-CNN and Mask R-CNN. For fair comparison of our proposed models with Faster R-CNN and Mask R-CNN, we used the same hyperparameters as Faster R-CNN and Mask R-CNN except those related to the bounding shape (or box) mask branch except learning rate and minibatch size owing to our limited experimental environment (2 NVIDIA GTX 1080Ti GPUs). In the Mask R-CNN paper, they trained a model with eight NVIDIA Tesla M40 GPUs. To train our models, each image contained 200 sampled RoIs, with a ratio of 1:3 of foreground to background, and anchors of five different scales and three aspect ratios are used as in (Ren et al. 2015). All experiments in this study were performed with RestNet50 or ResNet101 as the backbone feature extractor models. We evaluate our models using the mean average precision (map) with 0.5 intersection-over-union (IoU). We follow the bounding box evaluation using the Pascal VOC evaluation metric and the instance segmentation evaluation using the MS COCO evaluation metric. The MS COCO Dataset We resized images such that their shorter edge is 800 pixels. During training, we set the initial learning rate to and divided it by 10 when the loss curve was convergent (down to ). The minibatch size was 4. For the backbone (ResNet50 or ResNet101), we used pre-trained ImageNet (?) weights. The experimental results are shown in Table 1 and Table 2. Table 1 shows the bounding box prediction accuracy of the proposed models with various thicknesses and Table 2 shows the instance segmentation accuracy of the proposed models. Figure 3 shows examples of bounding box segmentation results for a 7-px Scored Bbox- Mask (ResNet101) and Figure 4 shows examples of instance segmentation and object detection results of a 7-px Scored BshapeMask (ResNet101). Pixels in the predicted box are blue for values of 0.5 or more and less than 0.6, green for values of 0.6 or more and less than 0.7, yellow for values of 0.7 or more and less than 0.8, and red for values of 0.8 or more. The same color scheme is used in Figure 5. The experimental results with four thicknesses (three, five, seven and eleven pixels) of object boundaries, show that the best bounding box prediction accuracy and instance segmentation accuracy was achieved with seven pixels among all models. Comparing BboxMask and BshapeMask results, Bshape- Mask is generally more accurate, as we expected. The boundary shape information of the object helps in object detection much more effectively than the bounding box infor-

.")
 map bb Model(ResNet50) map bb 3-px Thick BboxMask 57.7 3-px Scored BboxMask 57 5-px Thick BboxMask 58.2 5-px Scored BboxMask 58.")





 map mask Model(ResNet50) map mask 3-px Thick BshapeMask 48.1 3-px Scored BshapeMask 51.1 5-px Thick BshapeMask 51.")
 map mask Model(ResNet101) map mask 3-px Thick BshapeMask 49.8 3-px Scored BshapeMask 51.2 5-px Thick BshapeMask 53.4 5-px Scored BshapeMask 57.")

, so the accuracies shown in Table 1 are the results of our experiments, while Faster R-CNN (ResNet101) and Mask R-CNN (Res-Net101) are the accuracies reported in (He et al.")
5 Figure 3: Examples of bounding box segmentation results of 7-px Scored BboxMask (ResNet101) on the MS COCO val dataset. It can be seen that objects bounding boxes are well segmented even though no post-processing has been performed. Table 1: Bounding box prediction results on MS COCO validation dataset with map (%). Star (*) means the validation result in Mask R-CNN paper (He et al. 2017). The bounding box detection accuracy is denoted by map bb. Table 2: Instance segmentation results on MS COCO validation dataset with map (%). Star (*) means the validation result in the Mask R-CNN paper (He et al. 2017). Instance segmentation accuracy map is denoted by map mask. Model(ResNet50) map bb Model(ResNet50) map bb 3-px Thick BboxMask px Scored BboxMask 57 5-px Thick BboxMask px Scored BboxMask px Thick BboxMask 58 7-px Scored BboxMask px Thick BboxMask px Scored BboxMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask 61.1 Faster R-CNN 57.4 Mask R-CNN 58.0 Model(ResNet101) map bb Model(ResNet101) map bb 3-px Thick BboxMask px Scored BboxMask px Thick BboxMask px Scored BboxMask px Thick BboxMask px Scored BboxMask px Thick BboxMask px Scored BboxMask 68 3-px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask 69.7 Faster R-CNN* 59.6 Mask R-CNN* 60.3 mation. The results reveal that Scored models generally perform better than Thick models. As mentioned earlier, this experimentally confirms that filling the boundaries differently from the true boundary values improves the object detection performance, rather than filling them all with the same value when thickening the boundary. In further detail, among the models using ResNet50 as a backbone, the 7-px Scored BshapeMask (ResNet50) with a bounding box map of 62.6% and a mask map of 56.6% achieved the best performance, as shown in Tables 1 and 2. Similarly, among the models using ResNet101 as a backbone, the 7-px Scored BshapeMask (ResNet101) showed the best bounding box prediction performance with 69% (map) and instance segmentation performance with 58.7% Model(ResNet50) map mask Model(ResNet50) map mask 3-px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask 55 Mask R-CNN 55.2 Model(ResNet101) map mask Model(ResNet101) map mask 3-px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask 57 Mask R-CNN* 57.3 (map). We also compared the results of our models with those of Faster R-CNN and Mask R-CNN. Prior to the comparison, the accuracies for Faster R-CNN (ResNet50) and Mask R- CNN (Res-Net50) were not reported in (He et al. 2017; Ren et al. 2015), so the accuracies shown in Table 1 are the results of our experiments, while Faster R-CNN (ResNet101) and Mask R-CNN (Res-Net101) are the accuracies reported in (He et al. 2017). First, when comparing models using ResNet50 as a backbone, all our models outperform Faster R-CNN. Further, compared to the Mask R-CNN with a bounding box accuracy of 58.0% (map), almost of all of our models have better performance. Three of our models (5, 7, 11-px Scored BshapeMask models) outperform Mask R-CNN with 55.2% (map) instance segmentation accuracy. Especially, the 7-px Scored BshapeMask (ResNet50) with a bounding box accuracy of 62.6% (map) is 2.3 points higher than the Mask R-CNN (Res-Net101) using about twice as deep a backbone. Second, when comparing models using ResNet101 as a backbone, all our models outperform the 59.6% (map) bounding box accuracy of Faster R-CNN, as shown in Table 1. Further, compared to Mask R-CNN (ResNet101) with a bounding box accuracy of 60.3% (map), except for two models (3 and 11-px Thick BboxMask), our models
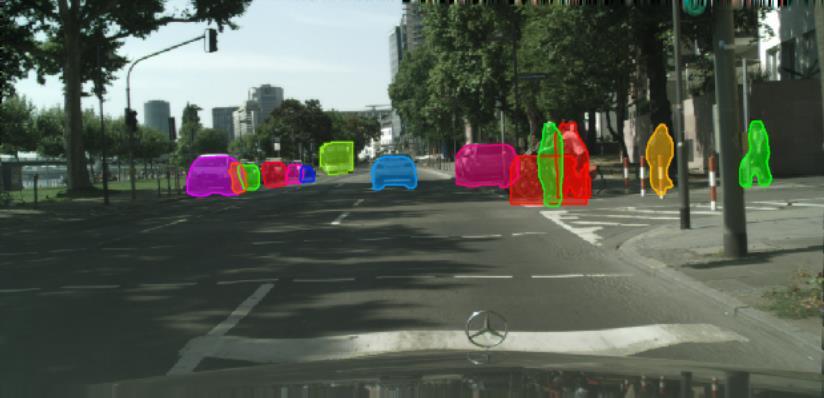
6 achieved better performance. Similar to the results of previous models using ResNet50, three of our models (5, 7, and 11-px Scored BshapeMask) outperform the 57.3% (map) instance segmentation accuracy of Mask R-CNN. The 7-px Scored BshapeMask (ResNet101) is best model among our models and its bounding box accuracy is 9.6 points higher than the Mask R-CNN (Res-Net101), which is an improvement of about 15%. And the instance segmentation accuracy of the 7-px Scored BshapeMask is 1.4 points higher than the Mask R-CNN (ResNet101). The Cityscapes Dataset The Cityscapes trainvaltest dataset is composed of a 2,975 image training set and 500 image validation set. The cityscape dataset has nine classes including background: person, rider, car, truck, bus, train, motorcycle, and bicycle. During training, we set the initial learning rate to and then divided by 10 when the loss curve was convergent (down to ); we used a minibatch size of 2 and the pre-trained MS COCO weights for backbones. Although the raw data size was pixels, it was reduced to pixels for operating in an 11 GB RAM environment. We performed the same experiments and evaluated the bounding box accuracy and instance segmentation accuracy in the same manner as the MS COCO dataset.the results are summarized in Table 3 and 4. For bounding box prediction, the BboxMask models were also less accurate than the BshapeMask models and the Scored models were more accurate than Thick models (same as for COCO). The 3-px Scored BshapeMask (ResNet50), the most accurate bounding box model among our models, achieved a bounding box accuracy of 55.3%, which is 10.1 points higher than the Faster R-CNN (ResNet50), which has an accuracy of 45.2% (map). This result is also 15.2% better than Mask R-CNNs accuracy of 48.0%. In addition, all our models achieved higher object detection accuracy than Faster R-CNN (ResNet50), and except for one model, the BshapeMask (ResNet50) models outperformed Mask R- CNN (ResNet50). Comparing object detection results of our models using ResNet101 with Faster R-CNN (ResNet101) and Mask R-CNN (ResNet101), all our models achieved higher detection accuracy. The highest performance model, 3-px Scored BshapeMask (ResNet101), achieved a bounding box prediction accuracy of 58% (map), which is 30% better than Faster R-CNN (ResNet101) and 21.2% better than Mask R-CNN (ResNet101). Regarding instance segmentation accuracy, all proposed models, except for the 3-px and 7-px Thick BshapeMask, show higher instance segmentation accuracy among the proposed models using ResNet50 as a backbone. Also, except for 7-px Thick BshapeMask, all proposal models that used ResNet101 as the backbone show higher instance segmentation accuracy than Mask R-CNN. Especially, 11-px Thick BshapeMask with ResNet101 has an instance segmentation accuracy of 52.4% (map) which is 1.7 points higher than Mask R-CNN and is an improvement of 3.3%. The 3-px Scored BshapeMask with ResNet101 has instance segmentation accuracy of 54.2% (map) which is 3.5 points higher than Mask R-CNN and is an improvement of 6%. In ad- Table 3: Bounding box prediction results on Cityscapes validation dataset with map (%). The bounding box prediction accuracy is denoted by map bb. Model(ResNet50) map bb Model(ResNet50) map bb 3-px Thick BboxMask px Scored BboxMask px Thick BboxMask px Scored BboxMask px Thick BboxMask px Scored BboxMask px Thick BboxMask px Scored BboxMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask 48 7-px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask 55.2 Faster R-CNN 45.2 Mask R-CNN 48.0 Model(ResNet101) map bb Model(ResNet101) map bb 3-px Thick BboxMask px Scored BboxMask 49 5-px Thick BboxMask px Scored BboxMask px Thick BboxMask 48 7-px Scored BboxMask px Thick BboxMask px Scored BboxMask px Thick BshapeMask px Scored BshapeMask 58 5-px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask 56.7 Faster R-CNN 45.3 Mask R-CNN* 48.6 Table 4: Instance segmentation results on Cityscapes validation dataset with map (%). Instance segmentation accuracy map is denoted by map mask. Model(ResNet50) map mask Model(ResNet50) map mask 3-px Thick BshapeMask px Scored BshapeMask 46 5-px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask 46.8 Mask R-CNN 46.4 Model(ResNet101) map mask Model(ResNet101) map mask 3-px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask px Thick BshapeMask px Scored BshapeMask 51 Mask R-CNN 50.7 dition to the numerical results, we can compare the performance of our proposed models in Figure 5, where the first row is the result of a 3-px Scored BshapeMask (ResNet101) in the Cityscapes dataset and the second row is the result of Mask R-CNN (ResNet101). The proposed model not only can detect distant objects or overlapping objects more accurately than Mask R-CNN, but also grasps the edges of objects well.


 on the")




) and the Mask")




.")







7 Mask R-CNN BshapeMask BshapeMask w/ post-processing w/o post-processing Figure 4: Examples of object detection and instance segmentation results (without post-processing) for the 7-px Scored BshapeMask (ResNet101) on the MS COCO val dataset. Scored BshapeMask detects the outlines of objects and the bounding box well. Figure 5: Comparison of the results of object detection and instance segmentation of CityScapes images by the proposed model (3-px Scored BshapeMask without post-processing (top) and 3-px Scored BshapeMask with post-processing (middle)) and the Mask R-CNN (bottom). Both models are trained in the same experimental environment and under the ResNet101 backbone. The proposed model detects objects that are not detected by Mask R-CNN as well as occluded objects. Conclusion In this paper, we define new masks that describe the boundary of object(s). To verify how these proposal masks can help in bounding box prediction and instance segmentation, we proposed new frameworks. We obtained the following three results. First, the Scored BshapeMask achieves the best performance among all frameworks. The second is that our proposed models displayed higher bounding box prediction accuracy than Faster R-CNN in all experiments, and confirmed that the proposed masks help to improve object de- tection performance. Finally, almost all Scored BshapeMask models were better than Mask R-CNN, and this showed that intensive learning of object boundaries is useful for instance segmentation. Acknowledgments This research was supported by System LSI Business, Samsung Electronics Co., Ltd.
8 References Cordts, M.; Omran, M.; Ramos, S.; Rehfeld, T.; Enzweiler, M.; Benenson, R.; Franke, U.; Roth, S.; and Schiele, B The cityscapes dataset for semantic urban scene understanding. In Proceedings of the IEEE conference on computer vision and pattern recognition, Dai, J.; He, K.; Li, Y.; Ren, S.; and Sun, J Instancesensitive fully convolutional networks. In European Conference on Computer Vision, Springer. Dai, J.; He, K.; and Sun, J Instance-aware semantic segmentation via multi-task network cascades. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Girshick, R.; Donahue, J.; Darrell, T.; and Malik, J Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, Girshick, R Fast r-cnn. In Proceedings of the IEEE international conference on computer vision, He, K.; Gkioxari, G.; Dollár, P.; and Girshick, R Mask r-cnn. In Computer Vision (ICCV), 2017 IEEE International Conference on, IEEE. Krähenbühl, P., and Koltun, V Efficient inference in fully connected crfs with gaussian edge potentials. In Advances in neural information processing systems, Li, Y.; Qi, H.; Dai, J.; Ji, X.; and Wei, Y Fully convolutional instance-aware semantic segmentation. arxiv preprint arxiv: Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; and Zitnick, C. L Microsoft coco: Common objects in context. In European conference on computer vision, Springer. Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; and Belongie, S Feature pyramid networks for object detection. In CVPR, volume 1, 4. Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; and Berg, A. C Ssd: Single shot multibox detector. In European conference on computer vision, Springer. Pinheiro, P. O.; Collobert, R.; and Dollár, P Learning to segment object candidates. In Advances in Neural Information Processing Systems, Prim, R. C Shortest connection networks and some generalizations. Bell system technical journal 36(6): Redmon, J.; Divvala, S.; Girshick, R.; and Farhadi, A You only look once: Unified, real-time object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, Ren, S.; He, K.; Girshick, R.; and Sun, J Faster r-cnn: Towards real-time object detection with region proposal networks. In Advances in neural information processing systems, Sermanet, P.; Eigen, D.; Zhang, X.; Mathieu, M.; Fergus, R.; and LeCun, Y Overfeat: Integrated recognition, localization and detection using convolutional networks. arxiv preprint arxiv: Uijlings, J. R.; Van De Sande, K. E.; Gevers, T.; and Smeulders, A. W Selective search for object recognition. International journal of computer vision 104(2):
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Amodal and Panoptic Segmentation. Stephanie Liu, Andrew Zhou
 Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Mask R-CNN. By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi
 Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
arxiv: v1 [cs.cv] 19 Mar 2018
![arxiv: v1 [cs.cv] 19 Mar 2018](/thumbs/78/77646221.jpg "arxiv: v1 [cs.cv] 19 Mar 2018") arxiv:1803.07066v1 [cs.cv] 19 Mar 2018 Learning Region Features for Object Detection Jiayuan Gu 1, Han Hu 2, Liwei Wang 1, Yichen Wei 2 and Jifeng Dai 2 1 Key Laboratory of Machine Perception, School of
arxiv:1803.07066v1 [cs.cv] 19 Mar 2018 Learning Region Features for Object Detection Jiayuan Gu 1, Han Hu 2, Liwei Wang 1, Yichen Wei 2 and Jifeng Dai 2 1 Key Laboratory of Machine Perception, School of
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
arxiv: v2 [cs.cv] 8 Apr 2018
![arxiv: v2 [cs.cv] 8 Apr 2018](/thumbs/86/94330536.jpg "arxiv: v2 [cs.cv] 8 Apr 2018") Single-Shot Object Detection with Enriched Semantics Zhishuai Zhang 1 Siyuan Qiao 1 Cihang Xie 1 Wei Shen 1,2 Bo Wang 3 Alan L. Yuille 1 Johns Hopkins University 1 Shanghai University 2 Hikvision Research
Single-Shot Object Detection with Enriched Semantics Zhishuai Zhang 1 Siyuan Qiao 1 Cihang Xie 1 Wei Shen 1,2 Bo Wang 3 Alan L. Yuille 1 Johns Hopkins University 1 Shanghai University 2 Hikvision Research
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Pedestrian Detection based on Deep Fusion Network using Feature Correlation
 Pedestrian Detection based on Deep Fusion Network using Feature Correlation Yongwoo Lee, Toan Duc Bui and Jitae Shin School of Electronic and Electrical Engineering, Sungkyunkwan University, Suwon, South
Pedestrian Detection based on Deep Fusion Network using Feature Correlation Yongwoo Lee, Toan Duc Bui and Jitae Shin School of Electronic and Electrical Engineering, Sungkyunkwan University, Suwon, South
arxiv: v2 [cs.cv] 18 Jul 2017
![arxiv: v2 [cs.cv] 18 Jul 2017](/thumbs/72/67294650.jpg "arxiv: v2 [cs.cv] 18 Jul 2017") PHAM, ITO, KOZAKAYA: BISEG 1 arxiv:1706.02135v2 [cs.cv] 18 Jul 2017 BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks Viet-Quoc Pham quocviet.pham@toshiba.co.jp
PHAM, ITO, KOZAKAYA: BISEG 1 arxiv:1706.02135v2 [cs.cv] 18 Jul 2017 BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks Viet-Quoc Pham quocviet.pham@toshiba.co.jp
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs
 Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Instance-aware Semantic Segmentation via Multi-task Network Cascades
 Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
arxiv: v2 [cs.cv] 23 Jan 2019
![arxiv: v2 [cs.cv] 23 Jan 2019](/thumbs/88/114974572.jpg "arxiv: v2 [cs.cv] 23 Jan 2019") COCO AP Consistent Optimization for Single-Shot Object Detection Tao Kong 1 Fuchun Sun 1 Huaping Liu 1 Yuning Jiang 2 Jianbo Shi 3 1 Department of Computer Science and Technology, Tsinghua University,
COCO AP Consistent Optimization for Single-Shot Object Detection Tao Kong 1 Fuchun Sun 1 Huaping Liu 1 Yuning Jiang 2 Jianbo Shi 3 1 Department of Computer Science and Technology, Tsinghua University,
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
3 Object Detection. BVM 2018 Tutorial: Advanced Deep Learning Methods. Paul F. Jaeger, Division of Medical Image Computing
 3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
arxiv: v3 [cs.cv] 17 May 2018
![arxiv: v3 [cs.cv] 17 May 2018](/thumbs/79/79331767.jpg "arxiv: v3 [cs.cv] 17 May 2018") FSSD: Feature Fusion Single Shot Multibox Detector Zuo-Xin Li Fu-Qiang Zhou Key Laboratory of Precision Opto-mechatronics Technology, Ministry of Education, Beihang University, Beijing 100191, China {lizuoxin,
FSSD: Feature Fusion Single Shot Multibox Detector Zuo-Xin Li Fu-Qiang Zhou Key Laboratory of Precision Opto-mechatronics Technology, Ministry of Education, Beihang University, Beijing 100191, China {lizuoxin,
arxiv: v1 [cs.cv] 26 May 2017
![arxiv: v1 [cs.cv] 26 May 2017](/thumbs/78/78157133.jpg "arxiv: v1 [cs.cv] 26 May 2017") arxiv:1705.09587v1 [cs.cv] 26 May 2017 J. JEONG, H. PARK AND N. KWAK: UNDER REVIEW IN BMVC 2017 1 Enhancement of SSD by concatenating feature maps for object detection Jisoo Jeong soo3553@snu.ac.kr Hyojin
arxiv:1705.09587v1 [cs.cv] 26 May 2017 J. JEONG, H. PARK AND N. KWAK: UNDER REVIEW IN BMVC 2017 1 Enhancement of SSD by concatenating feature maps for object detection Jisoo Jeong soo3553@snu.ac.kr Hyojin
Object Detection in Sports Videos
 Object Detection in Sports Videos M. Burić, M. Pobar, M. Ivašić-Kos University of Rijeka/Department of Informatics, Rijeka, Croatia matija.buric@hep.hr, marinai@inf.uniri.hr, mpobar@inf.uniri.hr Abstract
Object Detection in Sports Videos M. Burić, M. Pobar, M. Ivašić-Kos University of Rijeka/Department of Informatics, Rijeka, Croatia matija.buric@hep.hr, marinai@inf.uniri.hr, mpobar@inf.uniri.hr Abstract
arxiv: v3 [cs.cv] 12 Mar 2018
![arxiv: v3 [cs.cv] 12 Mar 2018](/thumbs/86/94163176.jpg "arxiv: v3 [cs.cv] 12 Mar 2018") Improving Object Localization with Fitness NMS and Bounded IoU Loss Lachlan Tychsen-Smith, Lars Petersson CSIRO (Data6) CSIRO-Synergy Building, Acton, ACT, 26 Lachlan.Tychsen-Smith@data6.csiro.au, Lars.Petersson@data6.csiro.au
Improving Object Localization with Fitness NMS and Bounded IoU Loss Lachlan Tychsen-Smith, Lars Petersson CSIRO (Data6) CSIRO-Synergy Building, Acton, ACT, 26 Lachlan.Tychsen-Smith@data6.csiro.au, Lars.Petersson@data6.csiro.au
arxiv: v1 [cs.cv] 26 Jun 2017
![arxiv: v1 [cs.cv] 26 Jun 2017](/thumbs/80/82184026.jpg "arxiv: v1 [cs.cv] 26 Jun 2017") Detecting Small Signs from Large Images arxiv:1706.08574v1 [cs.cv] 26 Jun 2017 Zibo Meng, Xiaochuan Fan, Xin Chen, Min Chen and Yan Tong Computer Science and Engineering University of South Carolina, Columbia,
Detecting Small Signs from Large Images arxiv:1706.08574v1 [cs.cv] 26 Jun 2017 Zibo Meng, Xiaochuan Fan, Xin Chen, Min Chen and Yan Tong Computer Science and Engineering University of South Carolina, Columbia,
Towards Real-Time Automatic Number Plate. Detection: Dots in the Search Space
 Towards Real-Time Automatic Number Plate Detection: Dots in the Search Space Chi Zhang Department of Computer Science and Technology, Zhejiang University wellyzhangc@zju.edu.cn Abstract Automatic Number
Towards Real-Time Automatic Number Plate Detection: Dots in the Search Space Chi Zhang Department of Computer Science and Technology, Zhejiang University wellyzhangc@zju.edu.cn Abstract Automatic Number
arxiv: v2 [cs.cv] 28 May 2017
![arxiv: v2 [cs.cv] 28 May 2017](/thumbs/76/73843498.jpg "arxiv: v2 [cs.cv] 28 May 2017") Fused DNN: A deep neural network fusion approach to fast and robust pedestrian detection Xianzhi Du 1, Mostafa El-Khamy 2, Jungwon Lee 2, Larry S. Davis 1 arxiv:1610.03466v2 [cs.cv] 28 May 2017 1 Computer
Fused DNN: A deep neural network fusion approach to fast and robust pedestrian detection Xianzhi Du 1, Mostafa El-Khamy 2, Jungwon Lee 2, Larry S. Davis 1 arxiv:1610.03466v2 [cs.cv] 28 May 2017 1 Computer
Classifying a specific image region using convolutional nets with an ROI mask as input
 Classifying a specific image region using convolutional nets with an ROI mask as input 1 Sagi Eppel Abstract Convolutional neural nets (CNN) are the leading computer vision method for classifying images.
Classifying a specific image region using convolutional nets with an ROI mask as input 1 Sagi Eppel Abstract Convolutional neural nets (CNN) are the leading computer vision method for classifying images.
arxiv: v1 [cs.cv] 5 Oct 2015
![arxiv: v1 [cs.cv] 5 Oct 2015](/thumbs/71/66021937.jpg "arxiv: v1 [cs.cv] 5 Oct 2015") Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
arxiv: v2 [cs.cv] 10 Apr 2017
![arxiv: v2 [cs.cv] 10 Apr 2017](/thumbs/80/82485703.jpg "arxiv: v2 [cs.cv] 10 Apr 2017") Fully Convolutional Instance-aware Semantic Segmentation Yi Li 1,2 Haozhi Qi 2 Jifeng Dai 2 Xiangyang Ji 1 Yichen Wei 2 1 Tsinghua University 2 Microsoft Research Asia {liyi14,xyji}@tsinghua.edu.cn, {v-haoq,jifdai,yichenw}@microsoft.com
Fully Convolutional Instance-aware Semantic Segmentation Yi Li 1,2 Haozhi Qi 2 Jifeng Dai 2 Xiangyang Ji 1 Yichen Wei 2 1 Tsinghua University 2 Microsoft Research Asia {liyi14,xyji}@tsinghua.edu.cn, {v-haoq,jifdai,yichenw}@microsoft.com
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
arxiv: v2 [cs.cv] 23 Nov 2017
![arxiv: v2 [cs.cv] 23 Nov 2017](/thumbs/75/71682984.jpg "arxiv: v2 [cs.cv] 23 Nov 2017") Light-Head R-CNN: In Defense of Two-Stage Object Detector Zeming Li 1, Chao Peng 2, Gang Yu 2, Xiangyu Zhang 2, Yangdong Deng 1, Jian Sun 2 1 School of Software, Tsinghua University, {lizm15@mails.tsinghua.edu.cn,
Light-Head R-CNN: In Defense of Two-Stage Object Detector Zeming Li 1, Chao Peng 2, Gang Yu 2, Xiangyu Zhang 2, Yangdong Deng 1, Jian Sun 2 1 School of Software, Tsinghua University, {lizm15@mails.tsinghua.edu.cn,
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm
 CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
Mask R-CNN. Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018
 Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
Boundary-aware Instance Segmentation
 Boundary-aware Instance Segmentation Zeeshan Hayder,2, Xuming He 2, Australian National University & 2 Data6/CSIRO Mathieu Salzmann 3 3 CVLab, EPFL, Switzerland Abstract We address the problem of instance-level
Boundary-aware Instance Segmentation Zeeshan Hayder,2, Xuming He 2, Australian National University & 2 Data6/CSIRO Mathieu Salzmann 3 3 CVLab, EPFL, Switzerland Abstract We address the problem of instance-level
Hand Detection For Grab-and-Go Groceries
 Hand Detection For Grab-and-Go Groceries Xianlei Qiu Stanford University xianlei@stanford.edu Shuying Zhang Stanford University shuyingz@stanford.edu Abstract Hands detection system is a very critical
Hand Detection For Grab-and-Go Groceries Xianlei Qiu Stanford University xianlei@stanford.edu Shuying Zhang Stanford University shuyingz@stanford.edu Abstract Hands detection system is a very critical
G-CNN: an Iterative Grid Based Object Detector
 G-CNN: an Iterative Grid Based Object Detector Mahyar Najibi 1, Mohammad Rastegari 1,2, Larry S. Davis 1 1 University of Maryland, College Park 2 Allen Institute for Artificial Intelligence najibi@cs.umd.edu
G-CNN: an Iterative Grid Based Object Detector Mahyar Najibi 1, Mohammad Rastegari 1,2, Larry S. Davis 1 1 University of Maryland, College Park 2 Allen Institute for Artificial Intelligence najibi@cs.umd.edu
arxiv: v1 [cs.cv] 29 Nov 2018
![arxiv: v1 [cs.cv] 29 Nov 2018](/thumbs/93/114181352.jpg "arxiv: v1 [cs.cv] 29 Nov 2018") Grid R-CNN Xin Lu 1 Buyu Li 1 Yuxin Yue 1 Quanquan Li 1 Junjie Yan 1 1 SenseTime Group Limited {luxin,libuyu,yueyuxin,liquanquan,yanjunjie}@sensetime.com arxiv:1811.12030v1 [cs.cv] 29 Nov 2018 Abstract
Grid R-CNN Xin Lu 1 Buyu Li 1 Yuxin Yue 1 Quanquan Li 1 Junjie Yan 1 1 SenseTime Group Limited {luxin,libuyu,yueyuxin,liquanquan,yanjunjie}@sensetime.com arxiv:1811.12030v1 [cs.cv] 29 Nov 2018 Abstract
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
arxiv: v3 [cs.cv] 18 Oct 2017
![arxiv: v3 [cs.cv] 18 Oct 2017](/thumbs/75/72627087.jpg "arxiv: v3 [cs.cv] 18 Oct 2017") SSH: Single Stage Headless Face Detector Mahyar Najibi* Pouya Samangouei* Rama Chellappa University of Maryland arxiv:78.3979v3 [cs.cv] 8 Oct 27 najibi@cs.umd.edu Larry S. Davis {pouya,rama,lsd}@umiacs.umd.edu
SSH: Single Stage Headless Face Detector Mahyar Najibi* Pouya Samangouei* Rama Chellappa University of Maryland arxiv:78.3979v3 [cs.cv] 8 Oct 27 najibi@cs.umd.edu Larry S. Davis {pouya,rama,lsd}@umiacs.umd.edu
Traffic Multiple Target Detection on YOLOv2
 Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
A MultiPath Network for Object Detection
 ZAGORUYKO et al.: A MULTIPATH NETWORK FOR OBJECT DETECTION 1 A MultiPath Network for Object Detection Sergey Zagoruyko, Adam Lerer, Tsung-Yi Lin, Pedro O. Pinheiro, Sam Gross, Soumith Chintala, Piotr Dollár
ZAGORUYKO et al.: A MULTIPATH NETWORK FOR OBJECT DETECTION 1 A MultiPath Network for Object Detection Sergey Zagoruyko, Adam Lerer, Tsung-Yi Lin, Pedro O. Pinheiro, Sam Gross, Soumith Chintala, Piotr Dollár
Object Detection on Self-Driving Cars in China. Lingyun Li
 Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Skin Lesion Attribute Detection for ISIC Using Mask-RCNN
 Skin Lesion Attribute Detection for ISIC 2018 Using Mask-RCNN Asmaa Aljuhani and Abhishek Kumar Department of Computer Science, Ohio State University, Columbus, USA E-mail: Aljuhani.2@osu.edu; Kumar.717@osu.edu
Skin Lesion Attribute Detection for ISIC 2018 Using Mask-RCNN Asmaa Aljuhani and Abhishek Kumar Department of Computer Science, Ohio State University, Columbus, USA E-mail: Aljuhani.2@osu.edu; Kumar.717@osu.edu
Gradient of the lower bound
 Weakly Supervised with Latent PhD advisor: Dr. Ambedkar Dukkipati Department of Computer Science and Automation gaurav.pandey@csa.iisc.ernet.in Objective Given a training set that comprises image and image-level
Weakly Supervised with Latent PhD advisor: Dr. Ambedkar Dukkipati Department of Computer Science and Automation gaurav.pandey@csa.iisc.ernet.in Objective Given a training set that comprises image and image-level
Fused DNN: A deep neural network fusion approach to fast and robust pedestrian detection
 2017 IEEE Winter Conference on Applications of Computer Vision Fused DNN: A deep neural network fusion approach to fast and robust pedestrian detection Xianzhi Du 1, Mostafa El-Khamy 2, Jungwon Lee 3,
2017 IEEE Winter Conference on Applications of Computer Vision Fused DNN: A deep neural network fusion approach to fast and robust pedestrian detection Xianzhi Du 1, Mostafa El-Khamy 2, Jungwon Lee 3,
arxiv: v2 [cs.cv] 26 Mar 2018
![arxiv: v2 [cs.cv] 26 Mar 2018](/thumbs/85/92916828.jpg "arxiv: v2 [cs.cv] 26 Mar 2018") Repulsion Loss: Detecting Pedestrians in a Crowd Xinlong Wang 1 Tete Xiao 2 Yuning Jiang 3 Shuai Shao 3 Jian Sun 3 Chunhua Shen 4 arxiv:1711.07752v2 [cs.cv] 26 Mar 2018 1 Tongji University 1452405wxl@tongji.edu.cn
Repulsion Loss: Detecting Pedestrians in a Crowd Xinlong Wang 1 Tete Xiao 2 Yuning Jiang 3 Shuai Shao 3 Jian Sun 3 Chunhua Shen 4 arxiv:1711.07752v2 [cs.cv] 26 Mar 2018 1 Tongji University 1452405wxl@tongji.edu.cn
Yield Estimation using faster R-CNN
 Yield Estimation using faster R-CNN 1 Vidhya Sagar, 2 Sailesh J.Jain and 2 Arjun P. 1 Assistant Professor, 2 UG Scholar, Department of Computer Engineering and Science SRM Institute of Science and Technology,Chennai,
Yield Estimation using faster R-CNN 1 Vidhya Sagar, 2 Sailesh J.Jain and 2 Arjun P. 1 Assistant Professor, 2 UG Scholar, Department of Computer Engineering and Science SRM Institute of Science and Technology,Chennai,
arxiv: v1 [cs.cv] 22 Mar 2018
![arxiv: v1 [cs.cv] 22 Mar 2018](/thumbs/89/99243655.jpg "arxiv: v1 [cs.cv] 22 Mar 2018") Single-Shot Bidirectional Pyramid Networks for High-Quality Object Detection Xiongwei Wu, Daoxin Zhang, Jianke Zhu, Steven C.H. Hoi School of Information Systems, Singapore Management University, Singapore
Single-Shot Bidirectional Pyramid Networks for High-Quality Object Detection Xiongwei Wu, Daoxin Zhang, Jianke Zhu, Steven C.H. Hoi School of Information Systems, Singapore Management University, Singapore
arxiv: v1 [cs.cv] 5 Dec 2017
![arxiv: v1 [cs.cv] 5 Dec 2017](/thumbs/87/95895504.jpg "arxiv: v1 [cs.cv] 5 Dec 2017") R-FCN-3000 at 30fps: Decoupling Detection and Classification Bharat Singh*1 Hengduo Li*2 Abhishek Sharma3 Larry S. Davis1 University of Maryland, College Park 1 Fudan University2 Gobasco AI Labs3 arxiv:1712.01802v1
R-FCN-3000 at 30fps: Decoupling Detection and Classification Bharat Singh*1 Hengduo Li*2 Abhishek Sharma3 Larry S. Davis1 University of Maryland, College Park 1 Fudan University2 Gobasco AI Labs3 arxiv:1712.01802v1
Multi-Level Fusion based 3D Object Detection from Monocular Images
 Multi-Level Fusion based 3D Object Detection from Monocular Images Bin Xu, Zhenzhong Chen School of Remote Sensing and Information Engineering, Wuhan University, China {ysfalo,zzchen}@whu.edu.cn Abstract
Multi-Level Fusion based 3D Object Detection from Monocular Images Bin Xu, Zhenzhong Chen School of Remote Sensing and Information Engineering, Wuhan University, China {ysfalo,zzchen}@whu.edu.cn Abstract
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
arxiv: v1 [cs.cv] 14 Dec 2015
![arxiv: v1 [cs.cv] 14 Dec 2015](/thumbs/72/67245194.jpg "arxiv: v1 [cs.cv] 14 Dec 2015") Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com arxiv:1512.04412v1 [cs.cv] 14 Dec 2015 Abstract
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com arxiv:1512.04412v1 [cs.cv] 14 Dec 2015 Abstract
arxiv: v2 [cs.cv] 19 Apr 2018
![arxiv: v2 [cs.cv] 19 Apr 2018](/thumbs/83/87325597.jpg "arxiv: v2 [cs.cv] 19 Apr 2018") arxiv:1804.06215v2 [cs.cv] 19 Apr 2018 DetNet: A Backbone network for Object Detection Zeming Li 1, Chao Peng 2, Gang Yu 2, Xiangyu Zhang 2, Yangdong Deng 1, Jian Sun 2 1 School of Software, Tsinghua University,
arxiv:1804.06215v2 [cs.cv] 19 Apr 2018 DetNet: A Backbone network for Object Detection Zeming Li 1, Chao Peng 2, Gang Yu 2, Xiangyu Zhang 2, Yangdong Deng 1, Jian Sun 2 1 School of Software, Tsinghua University,
An Analysis of Scale Invariance in Object Detection SNIP
 An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
Pixel Offset Regression (POR) for Single-shot Instance Segmentation
 for Single-shot Instance Segmentation") Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
arxiv: v1 [cs.cv] 10 Jan 2019
![arxiv: v1 [cs.cv] 10 Jan 2019](/thumbs/93/113326709.jpg "arxiv: v1 [cs.cv] 10 Jan 2019") Region Proposal by Guided Anchoring Jiaqi Wang 1 Kai Chen 1 Shuo Yang 2 Chen Change Loy 3 Dahua Lin 1 1 CUHK - SenseTime Joint Lab, The Chinese University of Hong Kong 2 Amazon Rekognition 3 Nanyang Technological
Region Proposal by Guided Anchoring Jiaqi Wang 1 Kai Chen 1 Shuo Yang 2 Chen Change Loy 3 Dahua Lin 1 1 CUHK - SenseTime Joint Lab, The Chinese University of Hong Kong 2 Amazon Rekognition 3 Nanyang Technological
arxiv: v1 [cs.cv] 4 Jun 2015
![arxiv: v1 [cs.cv] 4 Jun 2015](/thumbs/92/109659580.jpg "arxiv: v1 [cs.cv] 4 Jun 2015") Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks arxiv:1506.01497v1 [cs.cv] 4 Jun 2015 Shaoqing Ren Kaiming He Ross Girshick Jian Sun Microsoft Research {v-shren, kahe, rbg,
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks arxiv:1506.01497v1 [cs.cv] 4 Jun 2015 Shaoqing Ren Kaiming He Ross Girshick Jian Sun Microsoft Research {v-shren, kahe, rbg,
Feature-Fused SSD: Fast Detection for Small Objects
 Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
An Analysis of Scale Invariance in Object Detection SNIP
 An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
Modern Convolutional Object Detectors
 Modern Convolutional Object Detectors Faster R-CNN, R-FCN, SSD 29 September 2017 Presented by: Kevin Liang Papers Presented Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Modern Convolutional Object Detectors Faster R-CNN, R-FCN, SSD 29 September 2017 Presented by: Kevin Liang Papers Presented Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Gated Bi-directional CNN for Object Detection
 Gated Bi-directional CNN for Object Detection Xingyu Zeng,, Wanli Ouyang, Bin Yang, Junjie Yan, Xiaogang Wang The Chinese University of Hong Kong, Sensetime Group Limited {xyzeng,wlouyang}@ee.cuhk.edu.hk,
Gated Bi-directional CNN for Object Detection Xingyu Zeng,, Wanli Ouyang, Bin Yang, Junjie Yan, Xiaogang Wang The Chinese University of Hong Kong, Sensetime Group Limited {xyzeng,wlouyang}@ee.cuhk.edu.hk,
PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL
 PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL Yingxin Lou 1, Guangtao Fu 2, Zhuqing Jiang 1, Aidong Men 1, and Yun Zhou 2 1 Beijing University of Posts and Telecommunications, Beijing,
PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL Yingxin Lou 1, Guangtao Fu 2, Zhuqing Jiang 1, Aidong Men 1, and Yun Zhou 2 1 Beijing University of Posts and Telecommunications, Beijing,
Final Report: Smart Trash Net: Waste Localization and Classification
 Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
arxiv: v4 [cs.cv] 6 Jul 2016
![arxiv: v4 [cs.cv] 6 Jul 2016](/thumbs/93/112985717.jpg "arxiv: v4 [cs.cv] 6 Jul 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
arxiv: v1 [cs.cv] 19 Feb 2019
![arxiv: v1 [cs.cv] 19 Feb 2019](/thumbs/88/117177831.jpg "arxiv: v1 [cs.cv] 19 Feb 2019") Detector-in-Detector: Multi-Level Analysis for Human-Parts Xiaojie Li 1[0000 0001 6449 2727], Lu Yang 2[0000 0003 3857 3982], Qing Song 2[0000000346162200], and Fuqiang Zhou 1[0000 0001 9341 9342] arxiv:1902.07017v1
Detector-in-Detector: Multi-Level Analysis for Human-Parts Xiaojie Li 1[0000 0001 6449 2727], Lu Yang 2[0000 0003 3857 3982], Qing Song 2[0000000346162200], and Fuqiang Zhou 1[0000 0001 9341 9342] arxiv:1902.07017v1
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet.
 Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
Synscapes A photorealistic syntehtic dataset for street scene parsing Jonas Unger Department of Science and Technology Linköpings Universitet 7D Labs VINNOVA https://7dlabs.com Photo-realistic image synthesis
EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS. Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang
 EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang Image Formation and Processing (IFP) Group, University of Illinois at Urbana-Champaign
EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang Image Formation and Processing (IFP) Group, University of Illinois at Urbana-Champaign
Object Detection. TA : Young-geun Kim. Biostatistics Lab., Seoul National University. March-June, 2018
 Object Detection TA : Young-geun Kim Biostatistics Lab., Seoul National University March-June, 2018 Seoul National University Deep Learning March-June, 2018 1 / 57 Index 1 Introduction 2 R-CNN 3 YOLO 4
Object Detection TA : Young-geun Kim Biostatistics Lab., Seoul National University March-June, 2018 Seoul National University Deep Learning March-June, 2018 1 / 57 Index 1 Introduction 2 R-CNN 3 YOLO 4
Mimicking Very Efficient Network for Object Detection
 Mimicking Very Efficient Network for Object Detection Quanquan Li 1, Shengying Jin 2, Junjie Yan 1 1 SenseTime 2 Beihang University liquanquan@sensetime.com, jsychffy@gmail.com, yanjunjie@outlook.com Abstract
Mimicking Very Efficient Network for Object Detection Quanquan Li 1, Shengying Jin 2, Junjie Yan 1 1 SenseTime 2 Beihang University liquanquan@sensetime.com, jsychffy@gmail.com, yanjunjie@outlook.com Abstract
Learning Globally Optimized Object Detector via Policy Gradient
 Learning Globally Optimized Object Detector via Policy Gradient Yongming Rao 1,2,3, Dahua Lin 4, Jiwen Lu 1,2,3, Jie Zhou 1,2,3 1 Department of Automation, Tsinghua University 2 State Key Lab of Intelligent
Learning Globally Optimized Object Detector via Policy Gradient Yongming Rao 1,2,3, Dahua Lin 4, Jiwen Lu 1,2,3, Jie Zhou 1,2,3 1 Department of Automation, Tsinghua University 2 State Key Lab of Intelligent
DeepBox: Learning Objectness with Convolutional Networks
 DeepBox: Learning Objectness with Convolutional Networks Weicheng Kuo Bharath Hariharan Jitendra Malik University of California, Berkeley {wckuo, bharath2, malik}@eecs.berkeley.edu Abstract Existing object
DeepBox: Learning Objectness with Convolutional Networks Weicheng Kuo Bharath Hariharan Jitendra Malik University of California, Berkeley {wckuo, bharath2, malik}@eecs.berkeley.edu Abstract Existing object
arxiv: v2 [cs.cv] 10 Oct 2018
![arxiv: v2 [cs.cv] 10 Oct 2018](/thumbs/92/109817158.jpg "arxiv: v2 [cs.cv] 10 Oct 2018") Net: An Accurate and Efficient Single-Shot Object Detector for Autonomous Driving Qijie Zhao 1, Tao Sheng 1, Yongtao Wang 1, Feng Ni 1, Ling Cai 2 1 Institute of Computer Science and Technology, Peking
Net: An Accurate and Efficient Single-Shot Object Detector for Autonomous Driving Qijie Zhao 1, Tao Sheng 1, Yongtao Wang 1, Feng Ni 1, Ling Cai 2 1 Institute of Computer Science and Technology, Peking
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Parallel Feature Pyramid Network for Object Detection
 Parallel Feature Pyramid Network for Object Detection Seung-Wook Kim [0000 0002 6004 4086], Hyong-Keun Kook, Jee-Young Sun, Mun-Cheon Kang, and Sung-Jea Ko School of Electrical Engineering, Korea University,
Parallel Feature Pyramid Network for Object Detection Seung-Wook Kim [0000 0002 6004 4086], Hyong-Keun Kook, Jee-Young Sun, Mun-Cheon Kang, and Sung-Jea Ko School of Electrical Engineering, Korea University,
CS6501: Deep Learning for Visual Recognition. Object Detection I: RCNN, Fast-RCNN, Faster-RCNN
 CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
arxiv: v1 [cs.cv] 9 Aug 2017
![arxiv: v1 [cs.cv] 9 Aug 2017](/thumbs/78/78708739.jpg "arxiv: v1 [cs.cv] 9 Aug 2017") BlitzNet: A Real-Time Deep Network for Scene Understanding Nikita Dvornik Konstantin Shmelkov Julien Mairal Cordelia Schmid Inria arxiv:1708.02813v1 [cs.cv] 9 Aug 2017 Abstract Real-time scene understanding
BlitzNet: A Real-Time Deep Network for Scene Understanding Nikita Dvornik Konstantin Shmelkov Julien Mairal Cordelia Schmid Inria arxiv:1708.02813v1 [cs.cv] 9 Aug 2017 Abstract Real-time scene understanding
Adaptive Object Detection Using Adjacency and Zoom Prediction
 Adaptive Object Detection Using Adjacency and Zoom Prediction Yongxi Lu University of California, San Diego yol7@ucsd.edu Tara Javidi University of California, San Diego tjavidi@ucsd.edu Svetlana Lazebnik
Adaptive Object Detection Using Adjacency and Zoom Prediction Yongxi Lu University of California, San Diego yol7@ucsd.edu Tara Javidi University of California, San Diego tjavidi@ucsd.edu Svetlana Lazebnik
Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies
 ISSN: 2321-7782 (Online) e-isjn: A4372-3114 Impact Factor: 7.327 Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies Research Article
ISSN: 2321-7782 (Online) e-isjn: A4372-3114 Impact Factor: 7.327 Volume 6, Issue 12, December 2018 International Journal of Advance Research in Computer Science and Management Studies Research Article
SSD: Single Shot MultiBox Detector
 SSD: Single Shot MultiBox Detector Wei Liu 1(B), Dragomir Anguelov 2, Dumitru Erhan 3, Christian Szegedy 3, Scott Reed 4, Cheng-Yang Fu 1, and Alexander C. Berg 1 1 UNC Chapel Hill, Chapel Hill, USA {wliu,cyfu,aberg}@cs.unc.edu
SSD: Single Shot MultiBox Detector Wei Liu 1(B), Dragomir Anguelov 2, Dumitru Erhan 3, Christian Szegedy 3, Scott Reed 4, Cheng-Yang Fu 1, and Alexander C. Berg 1 1 UNC Chapel Hill, Chapel Hill, USA {wliu,cyfu,aberg}@cs.unc.edu
Learning to Segment Object Candidates
 Learning to Segment Object Candidates Pedro O. Pinheiro Ronan Collobert Piotr Dollár pedro@opinheiro.com locronan@fb.com pdollar@fb.com Facebook AI Research Abstract Recent object detection systems rely
Learning to Segment Object Candidates Pedro O. Pinheiro Ronan Collobert Piotr Dollár pedro@opinheiro.com locronan@fb.com pdollar@fb.com Facebook AI Research Abstract Recent object detection systems rely
R-FCN-3000 at 30fps: Decoupling Detection and Classification
 R-FCN-3000 at 30fps: Decoupling Detection and Classification Bharat Singh* 1 Hengduo Li* 2 Abhishek Sharma 3 Larry S. Davis 1 University of Maryland, College Park 1 Fudan University 2 Gobasco AI Labs 3
R-FCN-3000 at 30fps: Decoupling Detection and Classification Bharat Singh* 1 Hengduo Li* 2 Abhishek Sharma 3 Larry S. Davis 1 University of Maryland, College Park 1 Fudan University 2 Gobasco AI Labs 3
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network
 Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
R-FCN: Object Detection with Really - Friggin Convolutional Networks
 R-FCN: Object Detection with Really - Friggin Convolutional Networks Jifeng Dai Microsoft Research Li Yi Tsinghua Univ. Kaiming He FAIR Jian Sun Microsoft Research NIPS, 2016 Or Region-based Fully Convolutional
R-FCN: Object Detection with Really - Friggin Convolutional Networks Jifeng Dai Microsoft Research Li Yi Tsinghua Univ. Kaiming He FAIR Jian Sun Microsoft Research NIPS, 2016 Or Region-based Fully Convolutional
Improving Small Object Detection
 Improving Small Object Detection Harish Krishna, C.V. Jawahar CVIT, KCIS International Institute of Information Technology Hyderabad, India Abstract While the problem of detecting generic objects in natural
Improving Small Object Detection Harish Krishna, C.V. Jawahar CVIT, KCIS International Institute of Information Technology Hyderabad, India Abstract While the problem of detecting generic objects in natural
Foveal Vision for Instance Segmentation of Road Images
 Foveal Vision for Instance Segmentation of Road Images Benedikt Ortelt 1, Christian Herrmann 2,3, Dieter Willersinn 2, Jürgen Beyerer 2,3 1 Robert Bosch GmbH, Leonberg, Germany 2 Fraunhofer IOSB, Karlsruhe,
Foveal Vision for Instance Segmentation of Road Images Benedikt Ortelt 1, Christian Herrmann 2,3, Dieter Willersinn 2, Jürgen Beyerer 2,3 1 Robert Bosch GmbH, Leonberg, Germany 2 Fraunhofer IOSB, Karlsruhe,
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.