Industrial Robots : Manipulators, Kinematics, Dynamics
|
|
|
- Amos Gordon
- 5 years ago
- Views:
Transcription
1 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x

2 In Industrial terms
3
4 Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations of the several segments that make up the manipulators.
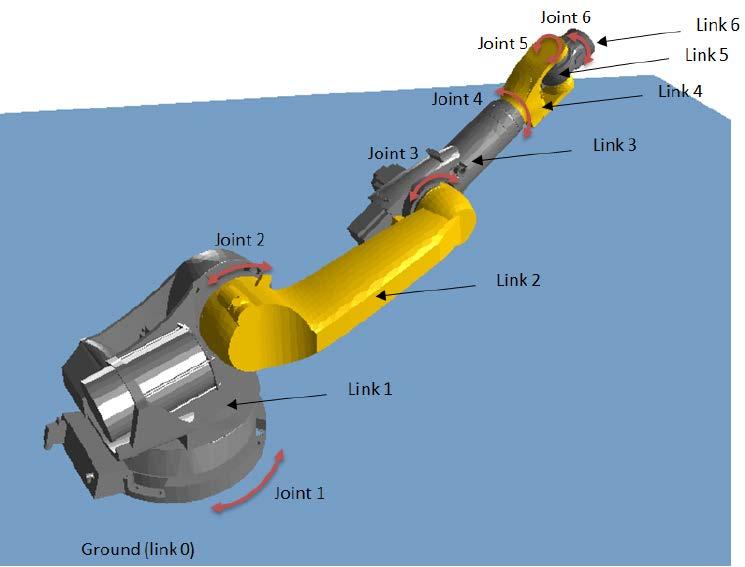
5 Manipulators Robot arms, industrial robot Rigid bodies (links) connected by joints Joints: revolute or prismatic Drive: electric, pneumatic or hydraulic End-Effector (tool) mounted on a flange or plate secured to the wrist joint of robot 5
6
7
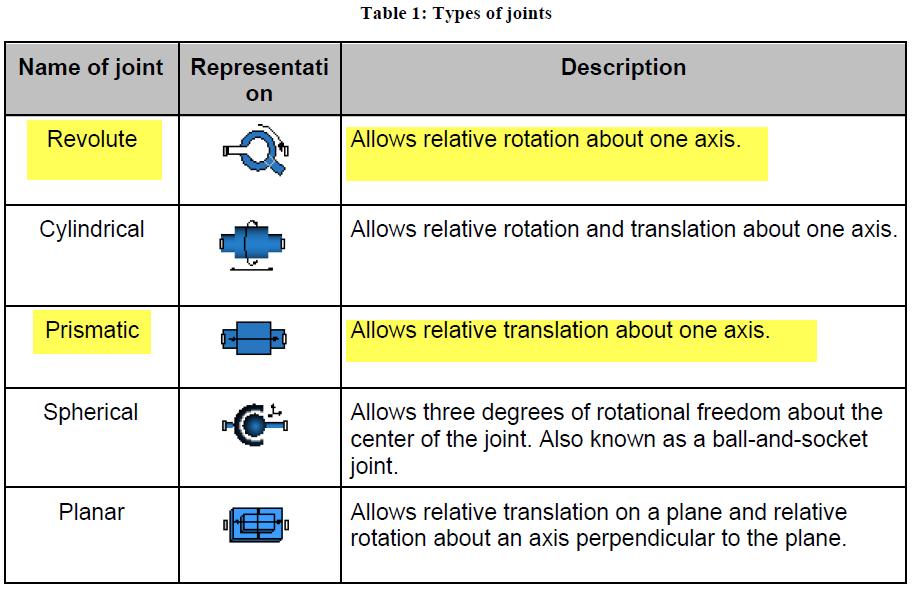
8 Joints Most manipulator joints are one of two types 1. Revolute (or rotary) like a hinge allows relative rotation about a fixed axis between two links axis of rotation is the z axis by convention 2. Prismatic (or linear) like a piston allows relative translation along a fixed axis between two links axis of translation is the z axis by convention
9
10 Articulated Manipulator RRR (first three joints are all revolute) joint axes z 0 : waist z 1 : shoulder (perpendicular to z 0 ) z 2 : elbow (parallel to z 1 ) z 0 z 1 z 2 θ 2 θ 3 shoulder forearm elbow θ 1 waist Common Manipulator Arrangements
11 Manipulators can be classified according to a variety of criteria. By Motion Characteristics Planar manipulator: A manipulator is called a planar manipulator if all the moving links move in planes parallel to one another. Spherical manipulator: A manipulator is called a spherical manipulator if all the links perform spherical motions about a common stationary point. Spatial manipulator: A manipulator is called a spatial manipulator if at least one of the links of the mechanism possesses a general spatial motion.
12 By Kinematic Structure Open-loop manipulator (or serial robot): A manipulator is called an open-loop manipulator if its links form an open-loop chain. Parallel manipulator: A manipulator is called a parallel manipulator if it is made up of a closedloop chain. Hybrid manipulator: A manipulator is called a hybrid manipulator if it consists of open loop and closed loop chains.
13 Degrees of Freedom - DOF The number of degrees of freedom of a mechanism are defined as the number of independent variables that are required to completely identify its configuration in space. Everywhere there is motion that can go in both directions can be considered a DOF.
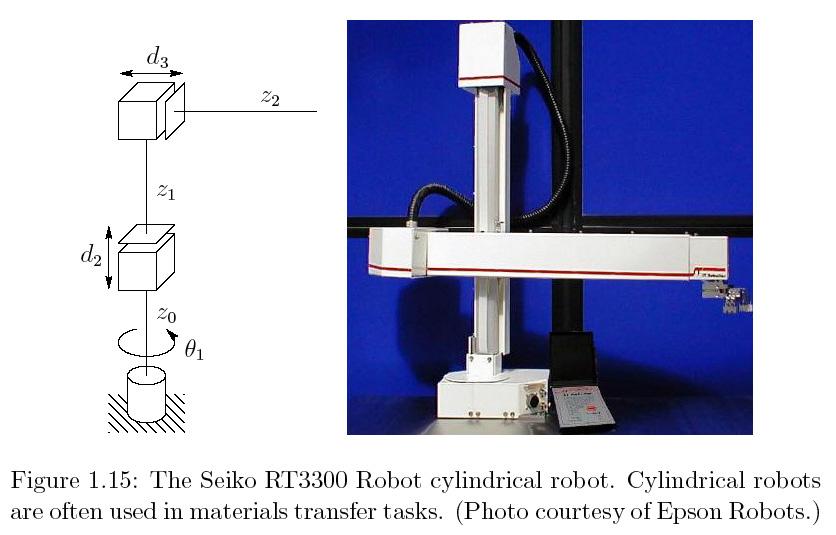
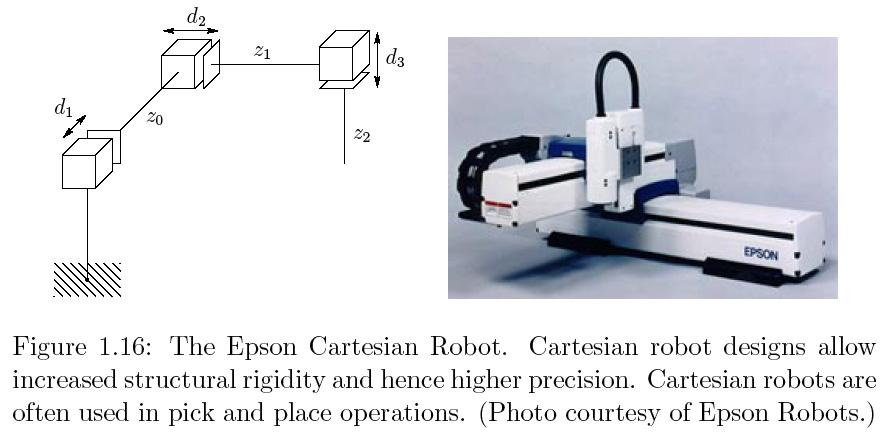
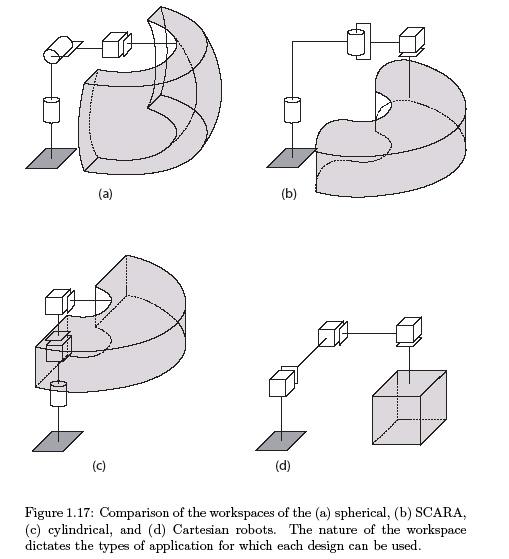
14 Four Basic Industrial Robot Geometries (Anatomies) 1. Polar- similar to cylindrical except that it is up/down motion is performed by a tilt 2. Cylindrical Uses vertical column, up/down, sliding arm so its workspace approximates a cylinder 3. Cartesian Uses three perpendicular slides to construct x, y, z axis. Sometimes this is called an x,y,z robot. Produces a rectangular work envelope. 4. Jointed Arm similar to human arm
15 Manipulators Industrial Robot Geometries (Anatomies): Cartesian: PPP Cylindrical: RPP Spherical: RRP Articulated: RRR SCARA: RRP (Selective Compliance Assembly Robot Arm) Hand coordinate: n: normal vector; s: sliding vector; a: approach vector, normal to the tool mounting plate
16
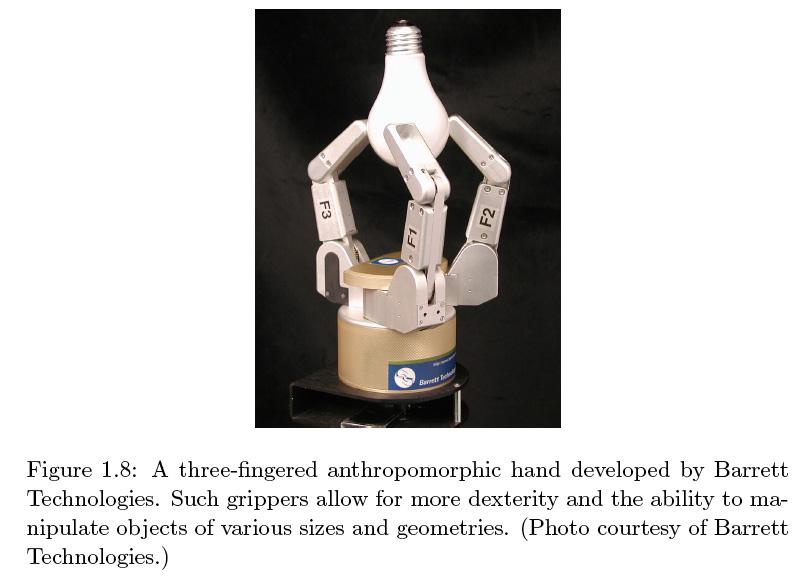
17 Manipulators/Endeffectors
18
19
= # of joints Workspace Payload (load capacity) Precision v.s. Repeatability What is workspace or in 3D printers print envolope?")
20 Robot Arm Specs Robot Specifications Number of Axes Major axes, (1-3) => Position the wrist Minor axes, (4-6) => Orient the tool Redundant, (7-n) => reaching around obstacles, avoiding undesirable configuration Degree of Freedom (DOF)= # of joints Workspace Payload (load capacity) Precision v.s. Repeatability What is workspace or in 3D printers print envolope?
21 PAYLOAD: THE ABILITY TO CARRY, CONTINOUSLY AND SATISFACTORILY, A GIVEN MAXIMUM WEIGHT AT A GIVEN SPEED. VELOCITY: THE MAXIMUM SPEED AT WHICH THE TIP OF A ROBOT IS CAPABLE OF MOVING AT FULL EXTENSION, EXPRESSED IN INCHES OR MILLIMETERS PER SECOND. CYCLE: TIME IT TAKES FOR THE ROBOT TO COMPLETE ONE CYCLE OF PICKING UP A GIVEN OBJECT AT A GIVEN HEIGHT, MOVING IT TO A GIVEN DISTANCE, LOWERING IT, RELEASING IT, AND RETURNING TO THE STARTING POINT. ACCURACY: A ROBOT S ABILITY TO POSITION THE END EFFECTOR AT A SPECIFIED POINT IN SPACE UPON RECEIVING A CONTROL COMMAND WITHOUT PREVIOUSLY HAVING ATTAINED THAT POSITION. REPEATIBILITY: THE ABILITY OF A ROBOT TO RETURN CONSISTENTLY TO A PREVIOUSLY DEFINED AND ACHIEVED LOCATION. RESOLUTION: THE SMALLEST INCREMENTAL CHANGE IN POSITION THAT IT MAKE OR ITS CONTROL SYSTEM CAN MEASURE.
22 ROBOT SELECTION ROBOT MUST BE MATCHED PROPERLY BY CAPABILITIES TO TASK REQUIREMENTS. AN OBJECTIVE APPROACH TO ROBOT SELECTION PROVIDES FEWER RESTRICTIONS IN SYSTEM DESIGN BY ALLOWING FOR THE OPTIMUM SYSTEM DESIGN TO BE ACHIEVED REGARDLESS OF THE SPECIFIC ROBOT NEED. CRITERIA FOR ROBOT SELECTION: TECHINICAL ISSUES: TYPE: NONSERVO, SERVO, SERVO-CONTROLLED WORK ENVELOPE: RECTANGULAR, CYLINDIRCAL, SPHERICAL, JOINTED ARM, SCARA PAYLOAD CYCLE TIME REPEATABILITY DRIVE: ELECTRIC, PNEUMATIC, HYDRAULIC, ANY COMBINATION UNIQUE CAPABILITIES NON-TECHNICAL ISSUES: COST AND BENEFIT CONSIDERATION COMMONALITY OF EQUIPMENT TRAINING AND MAINTENANCE REQUIREMENTS RELIABILITY SERVICE SYSTEMS HELP SAFETY
23
24
25 01_12
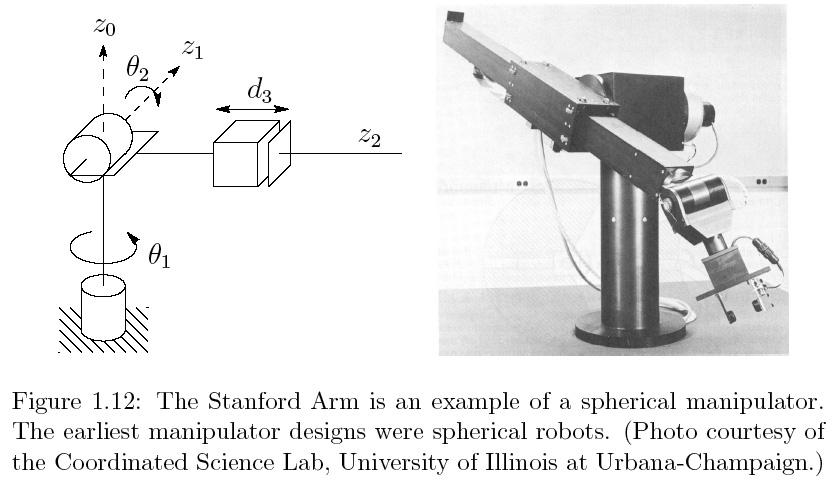
26 Spherical Manipulator RRP Stanford arm z 0 z 1 d 3 θ 2 shoulder z 2 θ 1 waist Common Manipulator Arrangements
27 SCARA Manipulator RRP Selective Compliant Articulated Robot for Assembly z 1 z 2 z 0 θ 2 d 3 θ 1 Common Manipulator Arrangements
28 01_14
29
30
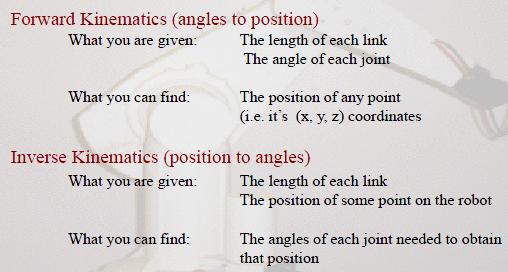
31
32
33
34 The figure shown above shows a two-link planar arm with rotary joints. Given that L1 = 2L2 and the joint ranges are sketch the approximate reachable workspace of the tip of link 2.
35

36 Kinematics Kinematics is the first step towards robot position control. Cartesian Space Joint Space Actuator Space z y x

37 Manual control and programming
38 Robot Kinematics In order to control and program a robot arm we must have knowledge of both it s spatial arrangement and a means of reference to the environment. KINEMATICS - the analytical study of the geometry of motion of a robot arm with respect to a fixed reference co-ordinate system.
39 Forward Kinematics is the process of calculating the position in space of the end of a linked structure, given the angles and length of all the joints. There is only one solution. Inverse Kinematics does the reverse. Given the end point of the structure, what angles do the joints need to be in the achieve that end point. It can be difficult, and there are usually many or infinitely many solutions. See reference guides for in depth study
40
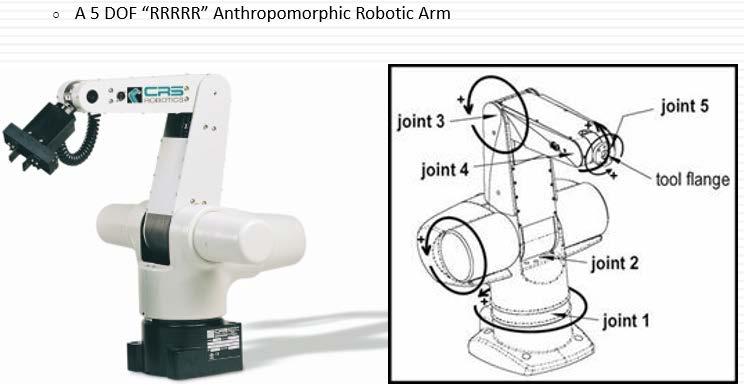
41 Lets Look at Position and Orientation of the links first 5 DOF Arm
42 Description of a Position The position of any point in space, relative to a reference frame, can be described by a 3x1 position vector. For example, the position of point P with respect to frame A can be written as: where Px, Py and Pz are the magnitudes of the projections of the line joining the point P and the origin on the x,y and z axes respectively.
43 Description of an Orientation The orientation of a body in space can be described by attaching a coordinate system to it and then describing the vectors of its coordinate axes relative to a known frame of reference.
44 For example, the coordinate axes of Frame B can be described relative to a known coordinate system A by the following unit vectors: Orientation of a single link

45 These three vectors can be combined to achieve a 3x3 matrix called a rotation matrix.
46 Rotation Matrix Properties In order to perform this rotational matrix the rotations matrix from Frame B with respect to Frame A is equal to the inverse and transpose of the rotation matrix of Frame A with respect to frame B. 1- All the columns of a rotation matrix are orthogonal (having right angles) to each other. 2- The determinant (same # of rows and columns) of a rotation matrix is The inverse of a rotation matrix is equal to its transpose.
, the rotation matrix of the new frame")
47 Let s rotate about the Z-axis If a reference frame (Frame A) is rotated by an angle α about the z-axis to obtain a new frame (Frame B), the rotation matrix of the new frame is:
48 If a reference frame (Frame A) is rotated by an angle β about the y-axis to obtain a new frame (Frame B), the rotation matrix of the new frame is: Rotation about the y-axis
49 If a reference frame (Frame A) is rotated by an angle γ about the x-axis to obtain a new frame (Frame B), the rotation matrix of the new frame is: Rotation about the x-axis
50 Forward Kinematics (in a two joint configuration) The more joints you have the harder it is to figure it out. - given the joint variables and dimensions of the links what is the position and orientation of the end effector relative to the base? (Px,Py,Pz) a 2 θ 2 a 1 θ 1
51 Forward Kinematics choose the base coordinate frame (base frame) of the robot and label it. we want (x, y) to be expressed in this frame. (x, y)? a 2 y 0 θ 2 a 1 θ 1 x 0
52 Forward Kinematics choose a coordinate frame with origin located on joint 2 with the same orientation as the base frame. For the first link we get ( a 1 cos θ 1, a 1 sin θ 1 ) (x, y)? y 1 a 2 θ 2 y 0 θ 1 x 1 a 1 θ 1 ( a 1 cos θ 1, a 1 sin θ 1 ) x 0
53 Forward Kinematics notice that link 2 moves in a circle centered on frame 1. For the second link we get ( a 2 cos (θ 1 + θ 2 ), a 2 sin (θ 1 + θ 2 ) ) (x, y)? y 1 a 2 ( a2 cos (θ 1 + θ 2 ), a2 sin (θ 1 + θ 2 ) ) y 0 θ 2 θ 1 x 1 a 1 θ 1 x 0 ( a 1 cos θ 1, a 1 sin θ 1 )
54 Forward Kinematics because the base frame and frame 1 have the same orientation, we can sum the coordinates to find the position of the end-effector in the base frame X=a 1 cos θ 1 + a 2 cos (θ 1 + θ 2 ) Y= a 1 sin θ 1 + a 2 sin (θ 1 + θ 2 ) y 1 a 2 ( a 2 cos (θ 1 + θ 2 ), y 0 θ 2 θ 1 x 1 a 2 sin (θ 1 + θ 2 ) ) a 1 θ 1 x 0 ( a 1 cos θ 1, a 1 sin θ 1 )
55 So we can get our X,Y point using the geometric approach. For the purpose of this class we will only deal with this scenario X=a 1 cos θ 1 + a 2 cos (θ 1 + θ 2 ) Y= a 1 sin θ 1 + a 2 sin (θ 1 + θ 2 ) 55 11/24/2014
56 Forward Kinematics
57 Inverse Kinematics given the position (x, y) (and possibly the orientation) of the endeffector, and the dimensions y 2 of the links, what are the joint variable angles l 2 (x, y) x 2 y 0 θ 2? l 1 θ 1? x 0
58 Inverse Kinematics harder than forward kinematics because there is often more than one possible solution Notice in the lab the arm went its own way until you gave it an orientation in the program? (x, y) l 2 y 0 l 1 x 0
59 Inverse Kinematics θ 2? l 1 l 2 x 0 y 0 (x, y) b + = arccos θ l l l l y x = x y arctan 2 y x ) sin(θ arcsin θ l Derived equations from law of cosines You could have two answers depending of the path and origin
60 The Denavit-Hartenberg Notation Matrix cosθi sinθ cosα sinθisinα 0 i (i 1) (i 1) sinθ cosθ cosα cosθ sinα i 0 (i 1) (i 1) Denavit-Hartenberg Matrix is a transformation matrix from one coordinate frame to the next. Using a series of D-H Matrix multiplications and the D-H Parameter table, the final result is a transformation matrix from some frame to your initial frame. i i 0 sinα cosα 0 (i 1) (i 1) ai αi d θ i i a (i 1) sinα cosα (i 1) (i 1) 1 d d i i link length link twist link offset joint angle Uses 4 parameters to describe how a frame (i) relates to a previous frame ( i -1 ).
61 Denavit-Hartenberg Representation : Simple way of modeling robot links and joints for any robot configuration, regardless of its sequence or complexity. Transformations in any coordinates is possible. Any possible combinations of joints and links and all-revolute articulated robots can be represented.

62 Denavit- Hartenberg Representation of Joint-Link- Joint Transformation Alpha is applied first
63 There are other methods for getting the inverse kinematic values: Jacobean You can research those methods here: Recommended videos: The Jacobean defines the transformation between the robot hand velocity and the joint velocity. Knowing the joint velocity, the joint angles and the parameters of the arm, the Jacobean can be computed and the hand velocity calculated in terms of the hand Cartesian coordinates. The Jacobean is an important component in many robot control algorithms. Normally, a control system receives sensory information about the robot s environment, most naturally implemented using Cartesian coordinates, yet robots operate in the joint or world coordinates. Transforms are needed between Cartesian coordinates and joint coordinates and vice versa. The transformation between the velocity of the arm, in terms of its joint speeds, and the velocity of the arm in Cartesian coordinates, in a particular frame of reference, is very important.
64 Extra Credit! Sample program in C has been uploaded to website to use as reference to create this program.

65 Consider the five axis CRS Robot Arm


66 Based on the info given below, write a program to calculate:

67 Now for Inverse Kinematics
68
69
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
EE Kinematics & Inverse Kinematics
 Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Forward kinematics and Denavit Hartenburg convention
 Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Prof. Mark Yim University of Pennsylvania
 Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions from joint
Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions from joint
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
3. Manipulator Kinematics. Division of Electronic Engineering Prof. Jaebyung Park
 3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017
 Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
MDP646: ROBOTICS ENGINEERING. Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt. Prof. Said M.
 MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Kinematic Model of Robot Manipulators
 Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Robotics Configuration of Robot Manipulators
 Robotics Configuration of Robot Manipulators Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics I. Cartesian Geometry Also called rectangular, rectilinear,
Robotics Configuration of Robot Manipulators Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics I. Cartesian Geometry Also called rectangular, rectilinear,
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
Prof. Mark Yim University of Pennsylvania
 Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom Robo1x-1.5 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions
Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom Robo1x-1.5 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
Ch 8 Industrial Robotics
 Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
MEAM 520. More Denavit-Hartenberg (DH)
") MEAM 520 More Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 6: September
MEAM 520 More Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 6: September
CSE4421/5324: Introduction to Robotics
 CSE442/5324: Introduction to Robotics Contact Information Burton Ma Lassonde 246 burton@cse.yorku.ca EECS442/5324 lectures Monday, Wednesday, Friday :3-2:3PM (SLH C) Lab Thursday 2:3-2:3, Prism 4 Lab 2
CSE442/5324: Introduction to Robotics Contact Information Burton Ma Lassonde 246 burton@cse.yorku.ca EECS442/5324 lectures Monday, Wednesday, Friday :3-2:3PM (SLH C) Lab Thursday 2:3-2:3, Prism 4 Lab 2
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
[2] J. "Kinematics," in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.
![[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.](/thumbs/90/102406247.jpg "[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.") 92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Kinematics - Introduction. Robotics. Kinematics - Introduction. Vladimír Smutný
 Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
Mechanical structure of a robot=skeleton of human body Study of structure of a robot=physical structure of the manipulator structure
 UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS
 KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
autorob.github.io Inverse Kinematics UM EECS 398/598 - autorob.github.io
 autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
Planar Robot Kinematics
 V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
MEAM 520. Denavit-Hartenberg (DH)
") MEAM 520 Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 5: September
MEAM 520 Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 5: September
Theory of Robotics and Mechatronics
 Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS
 Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS Amit L Talli 1, B. B. Kotturshettar 2 Asst. Professor, Department of Automation & Robotics
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS Amit L Talli 1, B. B. Kotturshettar 2 Asst. Professor, Department of Automation & Robotics
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
ECE569 Fall 2015 Solution to Problem Set 2
 ECE569 Fall 2015 Solution to Problem Set 2 These problems are from the textbook by Spong et al. 1, which is the textbook for the ECE580 this Fall 2015 semester. As such, many of the problem statements
ECE569 Fall 2015 Solution to Problem Set 2 These problems are from the textbook by Spong et al. 1, which is the textbook for the ECE580 this Fall 2015 semester. As such, many of the problem statements
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Advances in Engineering Research, volume 123 2nd International Conference on Materials Science, Machinery and Energy Engineering (MSMEE 2017)
") Advances in Engineering Research, volume nd International Conference on Materials Science, Machinery and Energy Engineering MSMEE Kinematics Simulation of DOF Manipulator Guangbing Bao,a, Shizhao Liu,b,
Advances in Engineering Research, volume nd International Conference on Materials Science, Machinery and Energy Engineering MSMEE Kinematics Simulation of DOF Manipulator Guangbing Bao,a, Shizhao Liu,b,
MEAM 520. Manipulator Kinematics
 MEAM 520 Manipulator Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 4: September
MEAM 520 Manipulator Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 4: September
Written exams of Robotics 1
 Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Theory of Machines Course # 1
 Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Chapter 2 Mechanisms Abstract
 Chapter 2 Mechanisms Abstract This chapter begins with a description of the different types of mechanisms that are generally used, especially in industrial robots. The parameters and variables of the mechanisms
Chapter 2 Mechanisms Abstract This chapter begins with a description of the different types of mechanisms that are generally used, especially in industrial robots. The parameters and variables of the mechanisms
Design & Kinematic Analysis of an Articulated Robotic Manipulator
 Design & Kinematic Analysis of an Articulated Robotic Manipulator Elias Eliot 1, B.B.V.L. Deepak 1*, D.R. Parhi 2, and J. Srinivas 2 1 Department of Industrial Design, National Institute of Technology-Rourkela
Design & Kinematic Analysis of an Articulated Robotic Manipulator Elias Eliot 1, B.B.V.L. Deepak 1*, D.R. Parhi 2, and J. Srinivas 2 1 Department of Industrial Design, National Institute of Technology-Rourkela
Lecture 18 Kinematic Chains
 CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering
 PR 5 Robot Dynamics & Control /8/7 PR 5: Robot Dynamics & Control Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering The Inverse Kinematics The determination of all possible
PR 5 Robot Dynamics & Control /8/7 PR 5: Robot Dynamics & Control Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering The Inverse Kinematics The determination of all possible
Carnegie Mellon University
 Actuators & Motion Instructors: Prof. Manuela Veloso & Dr. Paul E. Rybski TAs: Sonia Chernova & Nidhi Kalra 15-491, Fall 2004 http://www.andrew.cmu.edu/course/15-491 Computer Science Department Carnegie
Actuators & Motion Instructors: Prof. Manuela Veloso & Dr. Paul E. Rybski TAs: Sonia Chernova & Nidhi Kalra 15-491, Fall 2004 http://www.andrew.cmu.edu/course/15-491 Computer Science Department Carnegie
Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator robot
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
Finding Reachable Workspace of a Robotic Manipulator by Edge Detection Algorithm
 International Journal of Advanced Mechatronics and Robotics (IJAMR) Vol. 3, No. 2, July-December 2011; pp. 43-51; International Science Press, ISSN: 0975-6108 Finding Reachable Workspace of a Robotic Manipulator
International Journal of Advanced Mechatronics and Robotics (IJAMR) Vol. 3, No. 2, July-December 2011; pp. 43-51; International Science Press, ISSN: 0975-6108 Finding Reachable Workspace of a Robotic Manipulator
WORKSPACE AGILITY FOR ROBOTIC ARM Karna Patel
 ISSN 30-9135 1 International Journal of Advance Research, IJOAR.org Volume 4, Issue 1, January 016, Online: ISSN 30-9135 WORKSPACE AGILITY FOR ROBOTIC ARM Karna Patel Karna Patel is currently pursuing
ISSN 30-9135 1 International Journal of Advance Research, IJOAR.org Volume 4, Issue 1, January 016, Online: ISSN 30-9135 WORKSPACE AGILITY FOR ROBOTIC ARM Karna Patel Karna Patel is currently pursuing
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
 Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
Kinematic Synthesis. October 6, 2015 Mark Plecnik
 Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer
 Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
KINEMATIC MODELLING AND ANALYSIS OF 5 DOF ROBOTIC ARM
 International Journal of Robotics Research and Development (IJRRD) ISSN(P): 2250-1592; ISSN(E): 2278 9421 Vol. 4, Issue 2, Apr 2014, 17-24 TJPRC Pvt. Ltd. KINEMATIC MODELLING AND ANALYSIS OF 5 DOF ROBOTIC
International Journal of Robotics Research and Development (IJRRD) ISSN(P): 2250-1592; ISSN(E): 2278 9421 Vol. 4, Issue 2, Apr 2014, 17-24 TJPRC Pvt. Ltd. KINEMATIC MODELLING AND ANALYSIS OF 5 DOF ROBOTIC
Robotics I. March 27, 2018
 Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robot Geometry and Kinematics
 CIS 68/MEAM 50 Robot Geometr and Kinematics CIS 68/MEAM 50 Outline Industrial (conventional) robot arms Basic definitions for understanding -D geometr, kinematics Eamples Classification b geometr Relationship
CIS 68/MEAM 50 Robot Geometr and Kinematics CIS 68/MEAM 50 Outline Industrial (conventional) robot arms Basic definitions for understanding -D geometr, kinematics Eamples Classification b geometr Relationship
Inverse Kinematics of a Rhino Robot
 Inverse Kinematics of a Rhino Robot Rhino Robot (http://verona.fi-p.unam.mx/gpocontrol/images/rhino1.jpg) A Rhino robot is very similar to a 2-link arm with the exception that The base can rotate, allowing
Inverse Kinematics of a Rhino Robot Rhino Robot (http://verona.fi-p.unam.mx/gpocontrol/images/rhino1.jpg) A Rhino robot is very similar to a 2-link arm with the exception that The base can rotate, allowing
ADJUSTABLE GEOMETRIC CONSTRAINTS 2001 MIT PSDAM AND PERG LABS
 ADJUSTABLE GEOMETRIC CONSTRAINTS Why adjust kinematic couplings? KC Repeatability is orders of magnitude better than accuracy Accuracy = f ( manufacture and assemble ) Kinematic Coupling Accuracy Adjusted
ADJUSTABLE GEOMETRIC CONSTRAINTS Why adjust kinematic couplings? KC Repeatability is orders of magnitude better than accuracy Accuracy = f ( manufacture and assemble ) Kinematic Coupling Accuracy Adjusted
Reaching and Grasping
 Lecture 14: (06/03/14) Reaching and Grasping Reference Frames Configuration space Reaching Grasping Michael Herrmann michael.herrmann@ed.ac.uk, phone: 0131 6 517177, Informatics Forum 1.42 Robot arms Typically
Lecture 14: (06/03/14) Reaching and Grasping Reference Frames Configuration space Reaching Grasping Michael Herrmann michael.herrmann@ed.ac.uk, phone: 0131 6 517177, Informatics Forum 1.42 Robot arms Typically
Modelling of mechanical system CREATING OF KINEMATIC CHAINS
 Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics properties and performance measures @ 25 Redundancy first definition McKerrow When a manipulator can reach a specified position with more
Dipartimento di Elettronica Informazione e Bioingegneria Robotics properties and performance measures @ 25 Redundancy first definition McKerrow When a manipulator can reach a specified position with more
Using Algebraic Geometry to Study the Motions of a Robotic Arm
 Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
Manipulator kinematics
 CHAPTER 3 Manipulator kinematics 3.1 INTRODUCTION 3.2 LINK DESCRIPTION 3.3 LINK-CONNECTION DESCRIPTION 3.4 CONVENTION FOR AFFIXING FRAMES TO LINKS 3.5 MANIPULATOR KINEMATICS 3.6 ACTUATOR SPACE, JOINT SPACE,
CHAPTER 3 Manipulator kinematics 3.1 INTRODUCTION 3.2 LINK DESCRIPTION 3.3 LINK-CONNECTION DESCRIPTION 3.4 CONVENTION FOR AFFIXING FRAMES TO LINKS 3.5 MANIPULATOR KINEMATICS 3.6 ACTUATOR SPACE, JOINT SPACE,
INTRODUCTION. Robotics is a relatively young field of modern technology that crosses. Chapter 1
 Chapter 1 INTRODUCTION Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their application requires knowledge
Chapter 1 INTRODUCTION Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their application requires knowledge
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
CS545 Contents IX. Inverse Kinematics. Reading Assignment for Next Class. Analytical Methods Iterative (Differential) Methods
 Methods") CS545 Contents IX Inverse Kinematics Analytical Methods Iterative (Differential) Methods Geometric and Analytical Jacobian Jacobian Transpose Method Pseudo-Inverse Pseudo-Inverse with Optimization Extended
CS545 Contents IX Inverse Kinematics Analytical Methods Iterative (Differential) Methods Geometric and Analytical Jacobian Jacobian Transpose Method Pseudo-Inverse Pseudo-Inverse with Optimization Extended
ME5286 Robotics Spring 2013 Quiz 1
 Page 1 of 7 ME5286 Robotics Spring 2013 Quiz 1 Total Points: 36 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
Page 1 of 7 ME5286 Robotics Spring 2013 Quiz 1 Total Points: 36 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018)
: Final Exam (Fall Quarter 2017/2018)") ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
Index Terms Denavit-Hartenberg Parameters, Kinematics, Pick and place robotic arm, Taper roller bearings. III. METHODOLOGY
 ISSN: 39-5967 ISO 9:8 Certified Volume 5, Issue 3, May 6 DESIGN OF A PROTOTYPE OF A PICK AND PLACE ROBOTIC ARM Amod Aboti, Sanket Acharya, Abhinav Anand, Rushikesh Chintale, Vipul Ruiwale Abstract In the
ISSN: 39-5967 ISO 9:8 Certified Volume 5, Issue 3, May 6 DESIGN OF A PROTOTYPE OF A PICK AND PLACE ROBOTIC ARM Amod Aboti, Sanket Acharya, Abhinav Anand, Rushikesh Chintale, Vipul Ruiwale Abstract In the
Motion Control (wheeled robots)
") Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ x + 5y + 7z 9x + 3y + 11z
 Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
What is a Manipulator? 2007 RoboJackets TE Sessions 10/16/2007. Keys to Understanding Manipulators TE Sessions Manipulators 10/16/07
 2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
IntroductionToRobotics-Lecture02
 IntroductionToRobotics-Lecture02 Instructor (Oussama Khatib):Okay. Let's get started. So as always, the lecture starts with a video segment, and today's video segment comes from 1991, and from the group
IntroductionToRobotics-Lecture02 Instructor (Oussama Khatib):Okay. Let's get started. So as always, the lecture starts with a video segment, and today's video segment comes from 1991, and from the group
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Structure Based Classification and Kinematic Analysis of Six-Joint Industrial Robotic Manipulators
 Structure Based Classification and Kinematic Analysis of Six-Joint Industrial Robotic Manipulators 5 Tuna Balkan, M. Kemal Özgören and M. A. Sahir Arıkan Open Access Database www.i-techonline.com 1. Introduction
Structure Based Classification and Kinematic Analysis of Six-Joint Industrial Robotic Manipulators 5 Tuna Balkan, M. Kemal Özgören and M. A. Sahir Arıkan Open Access Database www.i-techonline.com 1. Introduction
Lecture Note 6: Forward Kinematics
 ECE5463: Introduction to Robotics Lecture Note 6: Forward Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 6 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 6: Forward Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 6 (ECE5463
Inverse Kinematics of 6 DOF Serial Manipulator. Robotics. Inverse Kinematics of 6 DOF Serial Manipulator
 Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
CS283: Robotics Fall 2016: Robot Arms
 CS83: Fall 016: Robot Arms Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 0.11.016 REVIEW ShanghaiTech University - SIST - 0.11.016 3 General Control Scheme for Mobile
CS83: Fall 016: Robot Arms Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 0.11.016 REVIEW ShanghaiTech University - SIST - 0.11.016 3 General Control Scheme for Mobile
Module 1 : Introduction to robotics. Lecture 3 : Industrial Manipulators & AGVs. Objectives. History of robots : Main bodies and wrists
 Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Centre for Autonomous Systems
 Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
ME5286 Robotics Spring 2014 Quiz 1 Solution. Total Points: 30
 Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Kinematics of the Stewart Platform (Reality Check 1: page 67)
") MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot