The mutual-exclusion problem involves making certain that two things don t happen at once. A non-computer example arose in the fighter aircraft of
|
|
|
- Milo Cuthbert Doyle
- 5 years ago
- Views:
Transcription
1
, machine guns were mounted directly in front of the pilot.")
2 The mutual-exclusion problem involves making certain that two things don t happen at once. A non-computer example arose in the fighter aircraft of World War I (pictured is a Sopwith Camel). Due to a number of constraints (e.g., machine guns tended to jam frequently and thus had to be close to people who could unjam them), machine guns were mounted directly in front of the pilot. However, blindly shooting a machine gun through the whirling propeller was not a good idea one was apt to shoot oneself down. At the beginning of the war, pilots politely refrained from attacking fellow pilots. A bit later in the war, however, the Germans developed the tactic of gaining altitude on an opponent, diving at him, turning off the engine, then firing without hitting the nowstationary propeller. Today, this would be called coarse-grained synchronization. Later, the Germans developed technology that synchronized the firing of the gun with the whirling of the propeller, so that shots were fired only when the propeller blades would not be in the way. This is perhaps the first example of a mutual-exclusion mechanism providing fine-grained synchronization.

3 Here we have two threads that are reading and modifying the same variable: both are adding one to x. Although the operation is written as a single step in terms of C code, it might take three machine instructions, as shown in the slide. If the initial value of x is 0 and the two threads execute the code shown in the slide, we might expect that the final value of x is 2. However, suppose the two threads execute the machine code at roughly the same time: each loads the value of x into its register, each adds one to the contents of the register, and each stores the result into x. The final result, of course, is that x is 1, not 2.
4
 or that only one thread is accessing a particular data structure at once (data")
5 To solve our synchronization problem, we introduce mutexes a synchronization construct providing mutual exclusion. A mutex is used to insure either that only one thread is executing a particular piece of code at once (code locking) or that only one thread is accessing a particular data structure at once (data locking). A mutex belongs either to a particular thread or to no thread (i.e., it is either locked or unlocked). A thread may lock a mutex by calling pthread_mutex_lock. If no other thread has the mutex locked, then the calling thread obtains the lock on the mutex and returns. Otherwise it waits until no other thread has the mutex, and finally returns with the mutex locked. There may of course be multiple threads waiting for the mutex to be unlocked. Only one thread can lock the mutex at a time; there is no specified order for who gets the mutex next, though the ordering is assumed to be at least somewhat fair. To unlock a mutex, a thread calls pthread_mutex_unlock. It is considered incorrect to unlock a mutex that is not held by the caller (i.e., to unlock someone else s mutex). However, it is somewhat costly to check for this, so most implementations, if they check at all, do so only when certain degrees of debugging are turned on. Like any other data structure, mutexes must be initialized. This can be done via a call to pthread_mutex_init or can be done statically by assigning PTHREAD_MUTEX_INITIALIZER to a mutex. The initial state of such initialized mutexes is unlocked. Of course, a mutex should be initialized only once! (I.e., make certain that, for each mutex, no more than one thread calls pthread_mutex_init.)

6 An important restriction on the use of mutexes is that the thread that locked a mutex should be the thread that unlocks it. For a number of reasons, not the least of which is readability and correctness, it is not good for a mutex to locked by one thread and then unlocked by another.
7 In this example our threads are using two mutexes to control access to two different objects. Thread 1, executing proc1, first takes mutex 1, then, while still holding mutex 1, obtains mutex 2. Thread 2, executing proc2, first takes mutex 2, then, while still holding mutex 2, obtains mutex 1. However, things do not always work out as planned. If thread 1 obtains mutex 1 and, at about the same time, thread 2 obtains mutex 2, then if thread 1 attempts to take mutex 2 and thread 2 attempts to take mutex 1, we have a deadlock.

8 Deadlock results when there are circularities in dependencies. In the slide, mutex 1 is held by thread a, which is waiting to take mutex 2. However, thread b is holding mutex 2, waiting to take mutex 1. If we can make certain that such circularities never happen, there can t possibly be deadlock.

9 If all threads take locks in the same order, deadlock cannot happen.

10 We have a singly linked list structure to which we d like multiple threads to be able to add nodes. The add_after function, shown in the slide, adds the node, given as its second argument, to the list after the node given as its first argument. The calls to pthread_mutex_lock and pthread_mutex_unlock provide appropriate synchronization in case two threads concurrently attempt to add a node after the same node. In this example, we have one mutex protecting the entire list.
11 We d now like finer-grained access so that multiple threads may be inserting items into the list at the same time (assuming they re not all trying to insert after the same node). To do this, we give each node its own mutex.
12 Now we have a doubly linked list. We modify our fine-grained add_after code to work with it. We add a delete routine to remove a node from the list. Assume the node being removed is at neither of the two ends of the list, and that we are adding a node after either the first node or the last node of the list.

13 If we add a new node after A, while at the same time delete node B, we can end up with a list that doesn t have B completely removed and doesn t have the new node completed added.
14 In this version of the code, we recognize that if we are to use or modify either of the pointer fields of a node, we must first lock its mutex.
15 However, we have a deadlock if one thread locks A s mutex in add_after, while at the same time another thread locks B s mutex in delete: now the first thread is attempting to lock B s mutex while holding A s mutex, but at the same time the second thread is attempting to lock A s mutex while holding B s mutex.
16 In this version of the code, we switch the order of the two calls to pthread_mutex_lock in delete so as to prevent deadlock.

17 It does not work!

18 What could happen is that one thread has locked B and is adding new. While this is taking place, another thread attempts to lock B so it can remove C. By the time it gets the lock on B, new has been added. The thread now tries to unlink C from B, but C is no longer linked to B.

19 There are sometimes situations in which it s not possible for all threads to lock mutexes in the same order. For example, we might not know which mutex to take second until the first mutex has already been obtained. To avoid deadlock in such situations, we can use the approach shown in the slide. Here thread 1, executing proc1, obtains the mutexes in the correct order. Thread 2, executing proc2, must for some reason take the mutexes out of order. If it is holding mutex 2, it must be careful about taking mutex 1. So, rather than call pthread_mutex_lock, it calls pthread_mutex_trylock, which always returns without blocking. If the mutex is available, pthread_mutex_trylock locks the mutex and returns 0. If the mutex is not available (i.e., it is locked by another thread), then pthread_mutex_trylock returns a nonzero error code (EBUSY). In the example, if mutex 1 is not available, it is probably because it is currently held by thread 1. If thread 2 were to block waiting for the mutex, we have an excellent chance for deadlock. So, rather than block, thread 1 not only quits trying for mutex 1 but also unlocks mutex 2 (since thread 1 could well be waiting for it). It then starts all over again, first taking mutex 2, then mutex 1.

20 In this version, which actually works, we use pthread_mutex_trylock to avoid deadlock when we take locks out of order. We also make sure that if we use a field within a node, we must have the node locked.

21 The problem we ve been looking at is a special case of what s known as the dining philosophers problem, posed by Edsger Dijkstra in EWD310, first published as Hierarchical Ordering of Sequential Processes in Operating Systems Techniques, C.A.R. Hoare and R.H. Perrot, Eds., Academic Press, New York, The idea is that we have five philosophers sitting around a table. At the center of the table is a plate of spaghetti. Between each pair of philosophers is a single chopstick (Dijkstra s original formulation used forks, but chopsticks make more sense). The algorithm of a philosopher is: while (1) { think(); when available grab chopstick from one side(); when available grab chopstick from the other side(); eat some spaghetti(); put chopsticks down(); } How long each operation takes varies. Which chopstick is grabbed first is not specified, but if each philosopher grabs their right chopstick first, they may starve to death. There are many subtle issues involved in its solution. (It has many, none of which are as interesting as the problem itself.) Philosophers clockwise from top: Laozi, Swami Vivekananda, Aristotle, Mary Wollstonecraft, Zara Yacob.
22

23 The routines pthread_mutex_init and pthread_mutex_destroy are supplied to initialize and to destroy a mutex. (They do not allocate or free the storage for the mutex data structure, but in some implementations they might allocate and free storage referred to by the mutex data structure.) As with threads, an attribute structure encapsulates the various parameters that might apply to the mutex. The routines pthread_mutexattr_init and pthread_mutexattr_destroy control the initialization and destruction of these attribute structures, as we see a few slides from now. For most purposes, the default attributes are fine and a NULL attrp can be provided to the pthread_mutex_init routine. Note that, as we ve already seen, a mutex that s allocated statically may be initialized with PTHREAD_MUTEX_INITIALIZER.

24 In the example at the top of the slide, we have mistyped the name of the mutex in the second call to pthread_mutex_lock. The result will be that when pthread_mutex_lock is called for the second time, there will be immediate deadlock, since the caller is attempting to lock a mutex that is already locked, but the only thread who can unlock that mutex is the caller. In the example at the bottom of the slide, we have again mistyped the name of a mutex, but this time for a pthread_mutex_unlock call. If m2 is not currently locked by some thread, unlocking will have unpredictable results, possibly fatal. If m2 is locked by some thread, again there will be unpredictable results, since a mutex that was thought to be locked (and protecting some data structure) is now unlocked. When the thread who locked it attempts to unlock it, the result will be even further unpredictability.

25 Checking for some sorts of mutex-related errors is relatively easy to do at runtime (though checking for all possible forms of deadlock is prohibitively expensive). However, since mutexes are used so frequently, even a little bit of extra overhead for runtime error checking is often thought to be too much. Thus, if done at all, runtime error checking is an optional feature. One turns on the feature for a particular mutex by initializing it to be of type ERRORCHECK, as shown in the slide. For mutexes initialized in this way, pthread_mutex_lock checks to make certain that it is not attempting to lock a mutex that is already locked by the calling thread; pthread_mutex_unlock checks to make certain that the mutex being unlocked is currently locked by the calling thread. Note that mutexes with the error-check attribute are more expensive than normal mutexes, since they must keep track of which thread, if any, has the mutex locked. (For normal mutexes, just a single bit must be maintained for the state of the mutex, which is either locked or unlocked.)
26 Here we have a simple function for inserting an item at the head of a singly linked list. So as to deal with multiple threads calling it concurrently, the function employs a mutex.
27 A third thread is calling InsertList. However, its intent is that it not only call InsertList twice, but that the value inserted in the second call must end up adjacent to the item inserted in the first call.

28 So as to ensure that no other items are inserted between the two it is inserting, thread 3 locks the mutex that s protecting the list. However, this approach clearly has a problem: after explicitly locking the mutex, thread 3 calls InsertList, which attempts to lock it again. Thus there will be deadlock. It s clear what the intent is here: thread 3 wants to make certain that the mutex is locked throughout the period from just before it calls InsertList the first time to just after its second call to InsertList returns. One solution, of course, is to remove the lock and unlock calls that are inside of InsertList and require all callers to explicitly lock the mutex before calling and to unlock it on return. This is unsatisfactory: it makes all code that uses InsertList more complicated (and error-prone). A better solution is to somehow fix pthread_mutex_lock so that what is shown in the slide actually works. This is done with the introduction of another mutex attribute, the recursive attribute: if a thread has a mutex locked, further calls to lock the same mutex by this thread will not block. Thus the implementation of such recursive mutexes entails maintaining a mutex owner, indicating which thread, if any, has the mutex locked, and a lock count, which is incremented by one each time the owning thread locks the mutex and decremented each time the thread unlocks it. The mutex is really unlocked (and the owning-thread field cleared) when the lock count is lowered to zero.

29 Here we create a mutex of type RECURSIVE: the same thread can lock it any number of times without problems. Note that recursive mutexes, due to the need to maintain a mutex owner and a lock count, are more expensive than normal mutexes and should be avoided unless really needed.

30 In the producer-consumer problem we have two classes of threads, producers and consumers, and a buffer containing a fixed number of slots. A producer thread attempts to put something into the next empty buffer slot, a consumer thread attempts to take something out of the next occupied buffer slot. The synchronization conditions are that producers cannot proceed unless there are empty slots and consumers cannot proceed unless there are occupied slots. This is a classic, but frequently occurring synchronization problem. For example, the heart of the implementation of UNIX pipes is an instance of this problem.
 evaluates to true.")
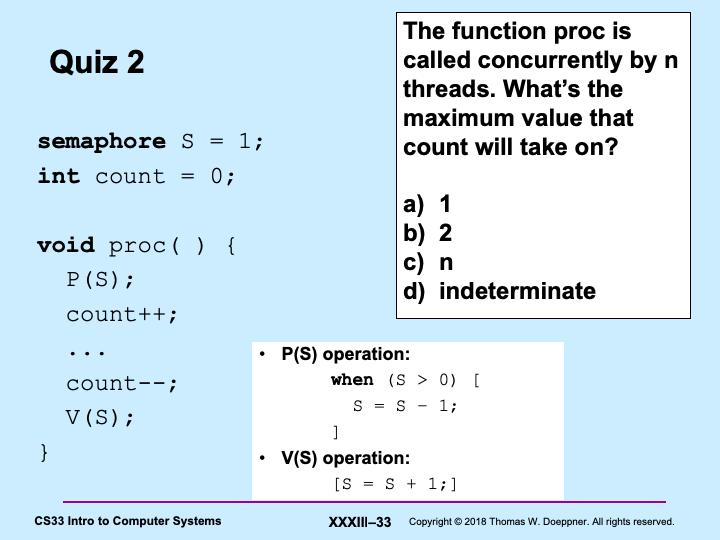
31 Illustrated in the slide is a simple pseudocode construct, the guarded command, that we use to describe how various synchronization operations work. The idea is that the code within the square brackets is executed only when the guard (which could be some arbitrary boolean expression) evaluates to true. Furthermore, this code within the square brackets is executed atomically, i.e., the effect is that nothing else happens in the program while the code is executed. Note that the code is not necessarily executed as soon as the guard evaluates to true: we are assured only that when execution of the code begins, the guard is true. Keep in mind that this is strictly pseudocode: it s not part of POSIX threads and is not necessarily even implementable (at least not for the general case).

32 Another synchronization construct is the semaphore, designed by Edsger Dijkstra in the 1960s. A semaphore behaves as if it were a nonnegative integer, but it can be operated on only by the semaphore operations. Dijkstra defined two of these: P (for prolagen, a made-up word derived from proberen te verlagen, which means try to decrease in Dutch) and V (for verhogen, increase in Dutch). Their semantics are shown in the slide. We think of operations on semaphores as being a special case of guarded commands a special case that occurs frequently enough to warrant a highly optimized implementation.
33

34 Here s a solution for the producer/consumer problem using semaphores note that it works only with a single producer and a single consumer, though it can be generalized to work with multiple producers and consumers.

35 Here is the POSIX interface for operations on semaphores. (These operation names are not typos the pthread_ prefix really is not used here, since the semaphore operations come from a different POSIX specification b. Note also the need for the header file, semaphore.h) When creating a semaphore (sem_init), rather than supplying an attributes structure, one supplies a single integer argument, pshared, which indicates whether the semaphore is to be used only by threads of one process (pshared = 0) or by multiple processes (pshared = 1). The third argument to sem_init is the semaphore s initial value. All the semaphore operations return zero if successful; otherwise they return an error code. The function sem_trywait is similar to sem_wait (and to the P operation) except that if the semaphore s value cannot be decremented immediately, then rather than wait, it returns -1 and sets errno to EAGAIN.

36 Here is the producer-consumer solution implemented with POSIX semaphores.
Copyright 2013 Thomas W. Doeppner. IX 1
 Copyright 2013 Thomas W. Doeppner. IX 1 If we have only one thread, then, no matter how many processors we have, we can do only one thing at a time. Thus multiple threads allow us to multiplex the handling
Copyright 2013 Thomas W. Doeppner. IX 1 If we have only one thread, then, no matter how many processors we have, we can do only one thing at a time. Thus multiple threads allow us to multiplex the handling
Synchronization. Semaphores implementation
 Synchronization Semaphores implementation Possible implementations There are seeral possible implementations (standard and non standard)of a semaphore Semaphores through pipe POSIX semaphores Linux semaphores
Synchronization Semaphores implementation Possible implementations There are seeral possible implementations (standard and non standard)of a semaphore Semaphores through pipe POSIX semaphores Linux semaphores
Process Management And Synchronization
 Process Management And Synchronization In a single processor multiprogramming system the processor switches between the various jobs until to finish the execution of all jobs. These jobs will share the
Process Management And Synchronization In a single processor multiprogramming system the processor switches between the various jobs until to finish the execution of all jobs. These jobs will share the
Process Synchronization. studykorner.org
 Process Synchronization Semaphore Implementation Must guarantee that no two processes can execute wait () and signal () on the same semaphore at the same time The main disadvantage of the semaphore definition
Process Synchronization Semaphore Implementation Must guarantee that no two processes can execute wait () and signal () on the same semaphore at the same time The main disadvantage of the semaphore definition
Dining Philosophers, Semaphores
 CS 220: Introduction to Parallel Computing Dining Philosophers, Semaphores Lecture 27 Today s Schedule Dining Philosophers Semaphores Barriers Thread Safety 4/30/18 CS 220: Parallel Computing 2 Today s
CS 220: Introduction to Parallel Computing Dining Philosophers, Semaphores Lecture 27 Today s Schedule Dining Philosophers Semaphores Barriers Thread Safety 4/30/18 CS 220: Parallel Computing 2 Today s
CSC Systems Programming Fall Lecture - XIV Concurrent Programming. Tevfik Ko!ar. Louisiana State University. November 2nd, 2010
 CSC 4304 - Systems Programming Fall 2010 Lecture - XIV Concurrent Programming Tevfik Ko!ar Louisiana State University November 2nd, 2010 1 Concurrency Issues 2 Concurrency Issues 3 Synchronization Mechanism
CSC 4304 - Systems Programming Fall 2010 Lecture - XIV Concurrent Programming Tevfik Ko!ar Louisiana State University November 2nd, 2010 1 Concurrency Issues 2 Concurrency Issues 3 Synchronization Mechanism
Deadlock and Monitors. CS439: Principles of Computer Systems February 7, 2018
 Deadlock and Monitors CS439: Principles of Computer Systems February 7, 2018 Last Time Terminology Safety and liveness Atomic Instructions, Synchronization, Mutual Exclusion, Critical Sections Synchronization
Deadlock and Monitors CS439: Principles of Computer Systems February 7, 2018 Last Time Terminology Safety and liveness Atomic Instructions, Synchronization, Mutual Exclusion, Critical Sections Synchronization
Semaphores. Jinkyu Jeong Computer Systems Laboratory Sungkyunkwan University
 Semaphores Jinkyu Jeong (jinkyu@skku.edu) Computer Systems Laboratory Sungkyunkwan University http://csl.skku.edu EEE3052: Introduction to Operating Systems, Fall 2017, Jinkyu Jeong (jinkyu@skku.edu) Synchronization
Semaphores Jinkyu Jeong (jinkyu@skku.edu) Computer Systems Laboratory Sungkyunkwan University http://csl.skku.edu EEE3052: Introduction to Operating Systems, Fall 2017, Jinkyu Jeong (jinkyu@skku.edu) Synchronization
Plan. Demos. Next Project. CSCI [4 6]730 Operating Systems. Hardware Primitives. Process Synchronization Part II. Synchronization Part 2
![Plan. Demos. Next Project. CSCI [4 6]730 Operating Systems. Hardware Primitives. Process Synchronization Part II. Synchronization Part 2](/thumbs/88/115136426.jpg "Plan. Demos. Next Project. CSCI [4 6]730 Operating Systems. Hardware Primitives. Process Synchronization Part II. Synchronization Part 2") Plan Demos Project: Due» Demos following week (Wednesday during class time) Next Week» New phase of presentations» Deadlock, finish synchronization Course Progress:» History, Structure, Processes, Threads,
Plan Demos Project: Due» Demos following week (Wednesday during class time) Next Week» New phase of presentations» Deadlock, finish synchronization Course Progress:» History, Structure, Processes, Threads,
Operating Systems. Thread Synchronization Primitives. Thomas Ropars.
 1 Operating Systems Thread Synchronization Primitives Thomas Ropars thomas.ropars@univ-grenoble-alpes.fr 2017 2 Agenda Week 42/43: Synchronization primitives Week 44: Vacation Week 45: Synchronization
1 Operating Systems Thread Synchronization Primitives Thomas Ropars thomas.ropars@univ-grenoble-alpes.fr 2017 2 Agenda Week 42/43: Synchronization primitives Week 44: Vacation Week 45: Synchronization
Data Races and Deadlocks! (or The Dangers of Threading) CS449 Fall 2017
 CS449 Fall 2017") Data Races and Deadlocks! (or The Dangers of Threading) CS449 Fall 2017 Data Race Shared Data: 465 1 8 5 6 209? tail A[] thread switch Enqueue(): A[tail] = 20; tail++; A[tail] = 9; tail++; Thread 0 Thread
Data Races and Deadlocks! (or The Dangers of Threading) CS449 Fall 2017 Data Race Shared Data: 465 1 8 5 6 209? tail A[] thread switch Enqueue(): A[tail] = 20; tail++; A[tail] = 9; tail++; Thread 0 Thread
Introduction to PThreads and Basic Synchronization
 Introduction to PThreads and Basic Synchronization Michael Jantz, Dr. Prasad Kulkarni Dr. Douglas Niehaus EECS 678 Pthreads Introduction Lab 1 Introduction In this lab, we will learn about some basic synchronization
Introduction to PThreads and Basic Synchronization Michael Jantz, Dr. Prasad Kulkarni Dr. Douglas Niehaus EECS 678 Pthreads Introduction Lab 1 Introduction In this lab, we will learn about some basic synchronization
High Performance Computing Lecture 21. Matthew Jacob Indian Institute of Science
 High Performance Computing Lecture 21 Matthew Jacob Indian Institute of Science Semaphore Examples Semaphores can do more than mutex locks Example: Consider our concurrent program where process P1 reads
High Performance Computing Lecture 21 Matthew Jacob Indian Institute of Science Semaphore Examples Semaphores can do more than mutex locks Example: Consider our concurrent program where process P1 reads
CMSC421: Principles of Operating Systems
 CMSC421: Principles of Operating Systems Nilanjan Banerjee Assistant Professor, University of Maryland Baltimore County nilanb@umbc.edu http://www.csee.umbc.edu/~nilanb/teaching/421/ Principles of Operating
CMSC421: Principles of Operating Systems Nilanjan Banerjee Assistant Professor, University of Maryland Baltimore County nilanb@umbc.edu http://www.csee.umbc.edu/~nilanb/teaching/421/ Principles of Operating
Dealing with Issues for Interprocess Communication
 Dealing with Issues for Interprocess Communication Ref Section 2.3 Tanenbaum 7.1 Overview Processes frequently need to communicate with other processes. In a shell pipe the o/p of one process is passed
Dealing with Issues for Interprocess Communication Ref Section 2.3 Tanenbaum 7.1 Overview Processes frequently need to communicate with other processes. In a shell pipe the o/p of one process is passed
Paralleland Distributed Programming. Concurrency
 Paralleland Distributed Programming Concurrency Concurrency problems race condition synchronization hardware (eg matrix PCs) software (barrier, critical section, atomic operations) mutual exclusion critical
Paralleland Distributed Programming Concurrency Concurrency problems race condition synchronization hardware (eg matrix PCs) software (barrier, critical section, atomic operations) mutual exclusion critical
Pre-lab #2 tutorial. ECE 254 Operating Systems and Systems Programming. May 24, 2012
 Pre-lab #2 tutorial ECE 254 Operating Systems and Systems Programming May 24, 2012 Content Concurrency Concurrent Programming Thread vs. Process POSIX Threads Synchronization and Critical Sections Mutexes
Pre-lab #2 tutorial ECE 254 Operating Systems and Systems Programming May 24, 2012 Content Concurrency Concurrent Programming Thread vs. Process POSIX Threads Synchronization and Critical Sections Mutexes
Lecture 9: Thread Synchronizations. Spring 2016 Jason Tang
 Lecture 9: Thread Synchronizations Spring 2016 Jason Tang Slides based upon Operating System Concept slides, http://codex.cs.yale.edu/avi/os-book/os9/slide-dir/index.html Copyright Silberschatz, Galvin,
Lecture 9: Thread Synchronizations Spring 2016 Jason Tang Slides based upon Operating System Concept slides, http://codex.cs.yale.edu/avi/os-book/os9/slide-dir/index.html Copyright Silberschatz, Galvin,
Deadlocks. Deadlock in Resource Sharing Environment. CIT 595 Spring Recap Example. Representing Deadlock
 Deadlock in Resource Sharing Environment Operating System Deadlocks CIT 595 Spring 2010 A deadlock occurs when 2 or more processes/threads permanently block each other by each having a lock on a resource
Deadlock in Resource Sharing Environment Operating System Deadlocks CIT 595 Spring 2010 A deadlock occurs when 2 or more processes/threads permanently block each other by each having a lock on a resource
Deadlock and Monitors. CS439: Principles of Computer Systems September 24, 2018
 Deadlock and Monitors CS439: Principles of Computer Systems September 24, 2018 Bringing It All Together Processes Abstraction for protection Define address space Threads Share (and communicate) through
Deadlock and Monitors CS439: Principles of Computer Systems September 24, 2018 Bringing It All Together Processes Abstraction for protection Define address space Threads Share (and communicate) through
Concurrent Programming
 Indian Institute of Science Bangalore, India भ रत य व ज ञ न स स थ न ब गल र, भ रत SE 292: High Performance Computing [3:0][Aug:2014] Concurrent Programming Yogesh Simmhan Adapted from Intro to Concurrent
Indian Institute of Science Bangalore, India भ रत य व ज ञ न स स थ न ब गल र, भ रत SE 292: High Performance Computing [3:0][Aug:2014] Concurrent Programming Yogesh Simmhan Adapted from Intro to Concurrent
CSci 4061 Introduction to Operating Systems. Synchronization Basics: Locks
 CSci 4061 Introduction to Operating Systems Synchronization Basics: Locks Synchronization Outline Basics Locks Condition Variables Semaphores Basics Race condition: threads + shared data Outcome (data
CSci 4061 Introduction to Operating Systems Synchronization Basics: Locks Synchronization Outline Basics Locks Condition Variables Semaphores Basics Race condition: threads + shared data Outcome (data
Operating systems and concurrency (B08)
") Operating systems and concurrency (B08) David Kendall Northumbria University David Kendall (Northumbria University) Operating systems and concurrency (B08) 1 / 20 Introduction Semaphores provide an unstructured
Operating systems and concurrency (B08) David Kendall Northumbria University David Kendall (Northumbria University) Operating systems and concurrency (B08) 1 / 20 Introduction Semaphores provide an unstructured
Introduction to Operating Systems
 Introduction to Operating Systems Lecture 4: Process Synchronization MING GAO SE@ecnu (for course related communications) mgao@sei.ecnu.edu.cn Mar. 18, 2015 Outline 1 The synchronization problem 2 A roadmap
Introduction to Operating Systems Lecture 4: Process Synchronization MING GAO SE@ecnu (for course related communications) mgao@sei.ecnu.edu.cn Mar. 18, 2015 Outline 1 The synchronization problem 2 A roadmap
Concurrency. Chapter 5
 Concurrency 1 Chapter 5 2 Concurrency Is a fundamental concept in operating system design Processes execute interleaved in time on a single processor Creates the illusion of simultaneous execution Benefits
Concurrency 1 Chapter 5 2 Concurrency Is a fundamental concept in operating system design Processes execute interleaved in time on a single processor Creates the illusion of simultaneous execution Benefits
Warm-up question (CS 261 review) What is the primary difference between processes and threads from a developer s perspective?
 What is the primary difference between processes and threads from a developer s perspective?") Warm-up question (CS 261 review) What is the primary difference between processes and threads from a developer s perspective? CS 470 Spring 2019 POSIX Mike Lam, Professor Multithreading & Pthreads MIMD
Warm-up question (CS 261 review) What is the primary difference between processes and threads from a developer s perspective? CS 470 Spring 2019 POSIX Mike Lam, Professor Multithreading & Pthreads MIMD
CS 162 Operating Systems and Systems Programming Professor: Anthony D. Joseph Spring Lecture 8: Semaphores, Monitors, & Condition Variables
 CS 162 Operating Systems and Systems Programming Professor: Anthony D. Joseph Spring 2004 Lecture 8: Semaphores, Monitors, & Condition Variables 8.0 Main Points: Definition of semaphores Example of use
CS 162 Operating Systems and Systems Programming Professor: Anthony D. Joseph Spring 2004 Lecture 8: Semaphores, Monitors, & Condition Variables 8.0 Main Points: Definition of semaphores Example of use
The University of Texas at Arlington
 The University of Texas at Arlington Lecture 6: Threading and Parallel Programming Constraints CSE 5343/4342 Embedded Systems II Based heavily on slides by Dr. Roger Walker More Task Decomposition: Dependence
The University of Texas at Arlington Lecture 6: Threading and Parallel Programming Constraints CSE 5343/4342 Embedded Systems II Based heavily on slides by Dr. Roger Walker More Task Decomposition: Dependence
Operating Systems. Designed and Presented by Dr. Ayman Elshenawy Elsefy
 Operating Systems Designed and Presented by Dr. Ayman Elshenawy Elsefy Dept. of Systems & Computer Eng.. AL-AZHAR University Website : eaymanelshenawy.wordpress.com Email : eaymanelshenawy@yahoo.com Reference
Operating Systems Designed and Presented by Dr. Ayman Elshenawy Elsefy Dept. of Systems & Computer Eng.. AL-AZHAR University Website : eaymanelshenawy.wordpress.com Email : eaymanelshenawy@yahoo.com Reference
PROCESS SYNCHRONIZATION
 PROCESS SYNCHRONIZATION Process Synchronization Background The Critical-Section Problem Peterson s Solution Synchronization Hardware Semaphores Classic Problems of Synchronization Monitors Synchronization
PROCESS SYNCHRONIZATION Process Synchronization Background The Critical-Section Problem Peterson s Solution Synchronization Hardware Semaphores Classic Problems of Synchronization Monitors Synchronization
Interprocess Communication and Synchronization
 Chapter 2 (Second Part) Interprocess Communication and Synchronization Slide Credits: Jonathan Walpole Andrew Tanenbaum 1 Outline Race Conditions Mutual Exclusion and Critical Regions Mutex s Test-And-Set
Chapter 2 (Second Part) Interprocess Communication and Synchronization Slide Credits: Jonathan Walpole Andrew Tanenbaum 1 Outline Race Conditions Mutual Exclusion and Critical Regions Mutex s Test-And-Set
Lecture 8: September 30
 CMPSCI 377 Operating Systems Fall 2013 Lecture 8: September 30 Lecturer: Prashant Shenoy Scribe: Armand Halbert 8.1 Semaphores A semaphore is a more generalized form of a lock that can be used to regulate
CMPSCI 377 Operating Systems Fall 2013 Lecture 8: September 30 Lecturer: Prashant Shenoy Scribe: Armand Halbert 8.1 Semaphores A semaphore is a more generalized form of a lock that can be used to regulate
IV. Process Synchronisation
 IV. Process Synchronisation Operating Systems Stefan Klinger Database & Information Systems Group University of Konstanz Summer Term 2009 Background Multiprogramming Multiple processes are executed asynchronously.
IV. Process Synchronisation Operating Systems Stefan Klinger Database & Information Systems Group University of Konstanz Summer Term 2009 Background Multiprogramming Multiple processes are executed asynchronously.
Process Synchronization(2)
") CSE 3221.3 Operating System Fundamentals No.6 Process Synchronization(2) Prof. Hui Jiang Dept of Computer Science and Engineering York University Semaphores Problems with the software solutions. Not easy
CSE 3221.3 Operating System Fundamentals No.6 Process Synchronization(2) Prof. Hui Jiang Dept of Computer Science and Engineering York University Semaphores Problems with the software solutions. Not easy
Week 3. Locks & Semaphores
 Week 3 Locks & Semaphores Synchronization Mechanisms Locks Very primitive constructs with minimal semantics Semaphores A generalization of locks Easy to understand, hard to program with Condition Variables
Week 3 Locks & Semaphores Synchronization Mechanisms Locks Very primitive constructs with minimal semantics Semaphores A generalization of locks Easy to understand, hard to program with Condition Variables
Process Synchronization
 TDDI04 Concurrent Programming, Operating Systems, and Real-time Operating Systems Process Synchronization [SGG7] Chapter 6 Copyright Notice: The lecture notes are mainly based on Silberschatz s, Galvin
TDDI04 Concurrent Programming, Operating Systems, and Real-time Operating Systems Process Synchronization [SGG7] Chapter 6 Copyright Notice: The lecture notes are mainly based on Silberschatz s, Galvin
Interprocess Communication By: Kaushik Vaghani
 Interprocess Communication By: Kaushik Vaghani Background Race Condition: A situation where several processes access and manipulate the same data concurrently and the outcome of execution depends on the
Interprocess Communication By: Kaushik Vaghani Background Race Condition: A situation where several processes access and manipulate the same data concurrently and the outcome of execution depends on the
Process Synchronization
 CSC 4103 - Operating Systems Spring 2007 Lecture - VI Process Synchronization Tevfik Koşar Louisiana State University February 6 th, 2007 1 Roadmap Process Synchronization The Critical-Section Problem
CSC 4103 - Operating Systems Spring 2007 Lecture - VI Process Synchronization Tevfik Koşar Louisiana State University February 6 th, 2007 1 Roadmap Process Synchronization The Critical-Section Problem
POSIX / System Programming
 POSIX / System Programming ECE 650 Methods and Tools for Software Eng. Guest lecture 2017 10 06 Carlos Moreno cmoreno@uwaterloo.ca E5-4111 2 Outline During today's lecture, we'll look at: Some of POSIX
POSIX / System Programming ECE 650 Methods and Tools for Software Eng. Guest lecture 2017 10 06 Carlos Moreno cmoreno@uwaterloo.ca E5-4111 2 Outline During today's lecture, we'll look at: Some of POSIX
The University of Texas at Arlington
 The University of Texas at Arlington Lecture 10: Threading and Parallel Programming Constraints CSE 5343/4342 Embedded d Systems II Objectives: Lab 3: Windows Threads (win32 threading API) Convert serial
The University of Texas at Arlington Lecture 10: Threading and Parallel Programming Constraints CSE 5343/4342 Embedded d Systems II Objectives: Lab 3: Windows Threads (win32 threading API) Convert serial
Deadlock CS 241. March 19, University of Illinois
 Deadlock CS 241 March 19, 2014 University of Illinois Slides adapted in part from material accompanying Bryant & O Hallaron, Computer Systems: A Programmer's Perspective, 2/E 1 The Dining Philosophers
Deadlock CS 241 March 19, 2014 University of Illinois Slides adapted in part from material accompanying Bryant & O Hallaron, Computer Systems: A Programmer's Perspective, 2/E 1 The Dining Philosophers
Semaphores. Otto J. Anshus University of {Tromsø, Oslo}
 Semaphores Otto J. Anshus University of {Tromsø, Oslo} Input sequence f Output sequence g Concurrency: Double buffering /* Fill s and empty t concurrently */ Get (s,f) s Put (t,g) t /* Copy */ t := s;
Semaphores Otto J. Anshus University of {Tromsø, Oslo} Input sequence f Output sequence g Concurrency: Double buffering /* Fill s and empty t concurrently */ Get (s,f) s Put (t,g) t /* Copy */ t := s;
CS3502 OPERATING SYSTEMS
 CS3502 OPERATING SYSTEMS Spring 2018 Synchronization Chapter 6 Synchronization The coordination of the activities of the processes Processes interfere with each other Processes compete for resources Processes
CS3502 OPERATING SYSTEMS Spring 2018 Synchronization Chapter 6 Synchronization The coordination of the activities of the processes Processes interfere with each other Processes compete for resources Processes
CS-345 Operating Systems. Tutorial 2: Grocer-Client Threads, Shared Memory, Synchronization
 CS-345 Operating Systems Tutorial 2: Grocer-Client Threads, Shared Memory, Synchronization Threads A thread is a lightweight process A thread exists within a process and uses the process resources. It
CS-345 Operating Systems Tutorial 2: Grocer-Client Threads, Shared Memory, Synchronization Threads A thread is a lightweight process A thread exists within a process and uses the process resources. It
High-level Synchronization
 Recap of Last Class High-level Synchronization CS 256/456 Dept. of Computer Science, University of Rochester Concurrent access to shared data may result in data inconsistency race condition. The Critical-Section
Recap of Last Class High-level Synchronization CS 256/456 Dept. of Computer Science, University of Rochester Concurrent access to shared data may result in data inconsistency race condition. The Critical-Section
Synchronization Primitives
 Synchronization Primitives Locks Synchronization Mechanisms Very primitive constructs with minimal semantics Semaphores A generalization of locks Easy to understand, hard to program with Condition Variables
Synchronization Primitives Locks Synchronization Mechanisms Very primitive constructs with minimal semantics Semaphores A generalization of locks Easy to understand, hard to program with Condition Variables
Synchronization and Semaphores. Copyright : University of Illinois CS 241 Staff 1
 Synchronization and Semaphores Copyright : University of Illinois CS 241 Staff 1 Synchronization Primatives Counting Semaphores Permit a limited number of threads to execute a section of the code Binary
Synchronization and Semaphores Copyright : University of Illinois CS 241 Staff 1 Synchronization Primatives Counting Semaphores Permit a limited number of threads to execute a section of the code Binary
Process Synchronization
 Process Synchronization Part III, Modified by M.Rebaudengo - 2013 Silberschatz, Galvin and Gagne 2009 POSIX Synchronization POSIX.1b standard was adopted in 1993 Pthreads API is OS-independent It provides:
Process Synchronization Part III, Modified by M.Rebaudengo - 2013 Silberschatz, Galvin and Gagne 2009 POSIX Synchronization POSIX.1b standard was adopted in 1993 Pthreads API is OS-independent It provides:
Synchronization. Dr. Yingwu Zhu
 Synchronization Dr. Yingwu Zhu Synchronization Threads cooperate in multithreaded programs To share resources, access shared data structures Threads accessing a memory cache in a Web server To coordinate
Synchronization Dr. Yingwu Zhu Synchronization Threads cooperate in multithreaded programs To share resources, access shared data structures Threads accessing a memory cache in a Web server To coordinate
More Shared Memory Programming
 More Shared Memory Programming Shared data structures We want to make data structures that can be shared by threads. For example, our program to copy a file from one disk to another used a shared FIFO
More Shared Memory Programming Shared data structures We want to make data structures that can be shared by threads. For example, our program to copy a file from one disk to another used a shared FIFO
Page 1. Goals for Today" Atomic Read-Modify-Write instructions" Examples of Read-Modify-Write "
 Goals for Today" CS162 Operating Systems and Systems Programming Lecture 5 Semaphores, Conditional Variables" Atomic instruction sequence Continue with Synchronization Abstractions Semaphores, Monitors
Goals for Today" CS162 Operating Systems and Systems Programming Lecture 5 Semaphores, Conditional Variables" Atomic instruction sequence Continue with Synchronization Abstractions Semaphores, Monitors
Synchronization Mechanisms
 Synchronization Mechanisms CSCI 4061 Introduction to Operating Systems Instructor: Abhishek Chandra Mutex Locks Enforce protection and mutual exclusion Condition variables Allow atomic checking of conditions
Synchronization Mechanisms CSCI 4061 Introduction to Operating Systems Instructor: Abhishek Chandra Mutex Locks Enforce protection and mutual exclusion Condition variables Allow atomic checking of conditions
Chapter 2 Processes and Threads. Interprocess Communication Race Conditions
 Chapter 2 Processes and Threads [ ] 2.3 Interprocess communication 2.4 Classical IPC problems 2.5 Scheduling 85 Interprocess Communication Race Conditions Two processes want to access shared memory at
Chapter 2 Processes and Threads [ ] 2.3 Interprocess communication 2.4 Classical IPC problems 2.5 Scheduling 85 Interprocess Communication Race Conditions Two processes want to access shared memory at
Processes Prof. James L. Frankel Harvard University. Version of 6:16 PM 10-Feb-2017 Copyright 2017, 2015 James L. Frankel. All rights reserved.
 Processes Prof. James L. Frankel Harvard University Version of 6:16 PM 10-Feb-2017 Copyright 2017, 2015 James L. Frankel. All rights reserved. Process Model Each process consists of a sequential program
Processes Prof. James L. Frankel Harvard University Version of 6:16 PM 10-Feb-2017 Copyright 2017, 2015 James L. Frankel. All rights reserved. Process Model Each process consists of a sequential program
Concurrency: Deadlock and Starvation. Chapter 6
 Concurrency: Deadlock and Starvation Chapter 6 Deadlock Permanent blocking of a set of processes that either compete for system resources or communicate with each other Involve conflicting needs for resources
Concurrency: Deadlock and Starvation Chapter 6 Deadlock Permanent blocking of a set of processes that either compete for system resources or communicate with each other Involve conflicting needs for resources
Deadlocks. Copyright : University of Illinois CS 241 Staff 1
 Deadlocks 1 Deadlock Which way should I go? 2 Deadlock I Oh can no! almost I m get stuck! across GRIDLOCK! 3 Deadlock Definition Deadlocked process Waiting for an event that will never occur Typically,
Deadlocks 1 Deadlock Which way should I go? 2 Deadlock I Oh can no! almost I m get stuck! across GRIDLOCK! 3 Deadlock Definition Deadlocked process Waiting for an event that will never occur Typically,
5 Classical IPC Problems
 OPERATING SYSTEMS CLASSICAL IPC PROBLEMS 2 5 Classical IPC Problems The operating systems literature is full of interesting problems that have been widely discussed and analyzed using a variety of synchronization
OPERATING SYSTEMS CLASSICAL IPC PROBLEMS 2 5 Classical IPC Problems The operating systems literature is full of interesting problems that have been widely discussed and analyzed using a variety of synchronization
Process Synchronization(2)
") EECS 3221.3 Operating System Fundamentals No.6 Process Synchronization(2) Prof. Hui Jiang Dept of Electrical Engineering and Computer Science, York University Semaphores Problems with the software solutions.
EECS 3221.3 Operating System Fundamentals No.6 Process Synchronization(2) Prof. Hui Jiang Dept of Electrical Engineering and Computer Science, York University Semaphores Problems with the software solutions.
Semaphore. Originally called P() and V() wait (S) { while S <= 0 ; // no-op S--; } signal (S) { S++; }
 and V() wait (S) { while S <= 0 ; // no-op S--; } signal (S) { S++; }") Semaphore Semaphore S integer variable Two standard operations modify S: wait() and signal() Originally called P() and V() Can only be accessed via two indivisible (atomic) operations wait (S) { while
Semaphore Semaphore S integer variable Two standard operations modify S: wait() and signal() Originally called P() and V() Can only be accessed via two indivisible (atomic) operations wait (S) { while
CS 345 Operating Systems. Tutorial 2: Treasure Room Simulation Threads, Shared Memory, Synchronization
 CS 345 Operating Systems Tutorial 2: Treasure Room Simulation Threads, Shared Memory, Synchronization Assignment 2 We have a treasure room, Team A and Team B. Treasure room has N coins inside. Each team
CS 345 Operating Systems Tutorial 2: Treasure Room Simulation Threads, Shared Memory, Synchronization Assignment 2 We have a treasure room, Team A and Team B. Treasure room has N coins inside. Each team
Programming Languages
 Programming Languages Tevfik Koşar Lecture - XXVI April 27 th, 2006 1 Roadmap Shared Memory Synchronization Spin Locks Barriers Semaphores Monitors 2 1 Memory Architectures Distributed Memory Shared Memory
Programming Languages Tevfik Koşar Lecture - XXVI April 27 th, 2006 1 Roadmap Shared Memory Synchronization Spin Locks Barriers Semaphores Monitors 2 1 Memory Architectures Distributed Memory Shared Memory
MULTITHREADING AND SYNCHRONIZATION. CS124 Operating Systems Fall , Lecture 10
 MULTITHREADING AND SYNCHRONIZATION CS124 Operating Systems Fall 2017-2018, Lecture 10 2 Critical Sections Race conditions can be avoided by preventing multiple control paths from accessing shared state
MULTITHREADING AND SYNCHRONIZATION CS124 Operating Systems Fall 2017-2018, Lecture 10 2 Critical Sections Race conditions can be avoided by preventing multiple control paths from accessing shared state
Back to synchronization
 Back to synchronization The dining philosophers problem Deadlocks o Modeling deadlocks o Dealing with deadlocks Operating Systems, 28, I. Dinur, D. Hendler and R. Iakobashvili The Dining Philosophers Problem
Back to synchronization The dining philosophers problem Deadlocks o Modeling deadlocks o Dealing with deadlocks Operating Systems, 28, I. Dinur, D. Hendler and R. Iakobashvili The Dining Philosophers Problem
CS4961 Parallel Programming. Lecture 12: Advanced Synchronization (Pthreads) 10/4/11. Administrative. Mary Hall October 4, 2011
 10/4/11. Administrative. Mary Hall October 4, 2011") CS4961 Parallel Programming Lecture 12: Advanced Synchronization (Pthreads) Mary Hall October 4, 2011 Administrative Thursday s class Meet in WEB L130 to go over programming assignment Midterm on Thursday
CS4961 Parallel Programming Lecture 12: Advanced Synchronization (Pthreads) Mary Hall October 4, 2011 Administrative Thursday s class Meet in WEB L130 to go over programming assignment Midterm on Thursday
Reintroduction to Concurrency
 Reintroduction to Concurrency The execution of a concurrent program consists of multiple processes active at the same time. 9/25/14 7 Dining philosophers problem Each philosopher spends some time thinking
Reintroduction to Concurrency The execution of a concurrent program consists of multiple processes active at the same time. 9/25/14 7 Dining philosophers problem Each philosopher spends some time thinking
W4118 Operating Systems. Instructor: Junfeng Yang
 W4118 Operating Systems Instructor: Junfeng Yang Outline Semaphores Producer-consumer problem Monitors and condition variables 2 Semaphore motivation Problem with lock: mutual exclusion, but no ordering
W4118 Operating Systems Instructor: Junfeng Yang Outline Semaphores Producer-consumer problem Monitors and condition variables 2 Semaphore motivation Problem with lock: mutual exclusion, but no ordering
Multithreading Programming II
 Multithreading Programming II Content Review Multithreading programming Race conditions Semaphores Thread safety Deadlock Review: Resource Sharing Access to shared resources need to be controlled to ensure
Multithreading Programming II Content Review Multithreading programming Race conditions Semaphores Thread safety Deadlock Review: Resource Sharing Access to shared resources need to be controlled to ensure
Yet another synchronization problem
 Yet another synchronization problem The dining philosophers problem Deadlocks o Modeling deadlocks o Dealing with deadlocks Operating Systems, 25, Meni Adler, Danny Hendler & Roie Zivan The Dining Philosophers
Yet another synchronization problem The dining philosophers problem Deadlocks o Modeling deadlocks o Dealing with deadlocks Operating Systems, 25, Meni Adler, Danny Hendler & Roie Zivan The Dining Philosophers
The Dining Philosophers with Pthreads
 The Dining Philosophers with Pthreads Dr. Douglas Niehaus Michael Jantz Dr. Prasad Kulkarni EECS 678 Dining Philosophers 1 Introduction The Dining Philosophers canonical problem illustrates a number of
The Dining Philosophers with Pthreads Dr. Douglas Niehaus Michael Jantz Dr. Prasad Kulkarni EECS 678 Dining Philosophers 1 Introduction The Dining Philosophers canonical problem illustrates a number of
Programming in Parallel COMP755
 Programming in Parallel COMP755 All games have morals; and the game of Snakes and Ladders captures, as no other activity can hope to do, the eternal truth that for every ladder you hope to climb, a snake
Programming in Parallel COMP755 All games have morals; and the game of Snakes and Ladders captures, as no other activity can hope to do, the eternal truth that for every ladder you hope to climb, a snake
Ricardo Rocha. Department of Computer Science Faculty of Sciences University of Porto
 Ricardo Rocha Department of Computer Science Faculty of Sciences University of Porto For more information please consult Advanced Programming in the UNIX Environment, 3rd Edition, W. Richard Stevens and
Ricardo Rocha Department of Computer Science Faculty of Sciences University of Porto For more information please consult Advanced Programming in the UNIX Environment, 3rd Edition, W. Richard Stevens and
1 Process Coordination
 COMP 730 (242) Class Notes Section 5: Process Coordination 1 Process Coordination Process coordination consists of synchronization and mutual exclusion, which were discussed earlier. We will now study
COMP 730 (242) Class Notes Section 5: Process Coordination 1 Process Coordination Process coordination consists of synchronization and mutual exclusion, which were discussed earlier. We will now study
CS 537 Lecture 8 Monitors. Thread Join with Semaphores. Dining Philosophers. Parent thread. Child thread. Michael Swift
 CS 537 Lecture 8 Monitors Michael Swift Two Classes of Synchronization Problems Uniform resource usage with simple scheduling constraints No other variables needed to express relationships Use one semaphore
CS 537 Lecture 8 Monitors Michael Swift Two Classes of Synchronization Problems Uniform resource usage with simple scheduling constraints No other variables needed to express relationships Use one semaphore
Synchronization. CSCI 3753 Operating Systems Spring 2005 Prof. Rick Han
 Synchronization CSCI 3753 Operating Systems Spring 2005 Prof. Rick Han Announcements HW #3 is coming, due Friday Feb. 25, a week+ from now PA #2 is coming, assigned about next Tuesday Midterm is tentatively
Synchronization CSCI 3753 Operating Systems Spring 2005 Prof. Rick Han Announcements HW #3 is coming, due Friday Feb. 25, a week+ from now PA #2 is coming, assigned about next Tuesday Midterm is tentatively
Deadlock. Disclaimer: some slides are adopted from Dr. Kulkarni s and book authors slides with permission 1
 Deadlock Disclaimer: some slides are adopted from Dr. Kulkarni s and book authors slides with permission 1 Recap: Synchronization Race condition A situation when two or more threads read and write shared
Deadlock Disclaimer: some slides are adopted from Dr. Kulkarni s and book authors slides with permission 1 Recap: Synchronization Race condition A situation when two or more threads read and write shared
Systems Programming/ C and UNIX
 Systems Programming/ C and UNIX Alice E. Fischer November 22, 2013 Alice E. Fischer () Systems Programming Lecture 12... 1/27 November 22, 2013 1 / 27 Outline 1 Jobs and Job Control 2 Shared Memory Concepts
Systems Programming/ C and UNIX Alice E. Fischer November 22, 2013 Alice E. Fischer () Systems Programming Lecture 12... 1/27 November 22, 2013 1 / 27 Outline 1 Jobs and Job Control 2 Shared Memory Concepts
Chapter 6: Process Synchronization
 Chapter 6: Process Synchronization Objectives Introduce Concept of Critical-Section Problem Hardware and Software Solutions of Critical-Section Problem Concept of Atomic Transaction Operating Systems CS
Chapter 6: Process Synchronization Objectives Introduce Concept of Critical-Section Problem Hardware and Software Solutions of Critical-Section Problem Concept of Atomic Transaction Operating Systems CS
Page 1. Goals for Today" Atomic Read-Modify-Write instructions" Examples of Read-Modify-Write "
 Goals for Today" CS162 Operating Systems and Systems Programming Lecture 5 Semaphores, Conditional Variables" Atomic instruction sequence Continue with Synchronization Abstractions Semaphores, Monitors
Goals for Today" CS162 Operating Systems and Systems Programming Lecture 5 Semaphores, Conditional Variables" Atomic instruction sequence Continue with Synchronization Abstractions Semaphores, Monitors
Concurrency, Thread. Dongkun Shin, SKKU
 Concurrency, Thread 1 Thread Classic view a single point of execution within a program a single PC where instructions are being fetched from and executed), Multi-threaded program Has more than one point
Concurrency, Thread 1 Thread Classic view a single point of execution within a program a single PC where instructions are being fetched from and executed), Multi-threaded program Has more than one point
CS 471 Operating Systems. Yue Cheng. George Mason University Fall 2017
 CS 471 Operating Systems Yue Cheng George Mason University Fall 2017 1 Review: Sync Terminology Worksheet 2 Review: Semaphores 3 Semaphores o Motivation: Avoid busy waiting by blocking a process execution
CS 471 Operating Systems Yue Cheng George Mason University Fall 2017 1 Review: Sync Terminology Worksheet 2 Review: Semaphores 3 Semaphores o Motivation: Avoid busy waiting by blocking a process execution
CS370 Operating Systems
 CS370 Operating Systems Colorado State University Yashwant K Malaiya Spring 1018 L11 Synchronization Slides based on Text by Silberschatz, Galvin, Gagne Various sources 1 1 FAQ Multilevel feedback queue:
CS370 Operating Systems Colorado State University Yashwant K Malaiya Spring 1018 L11 Synchronization Slides based on Text by Silberschatz, Galvin, Gagne Various sources 1 1 FAQ Multilevel feedback queue:
Processes & Concurrency
 Chapter 9 Processes & Concurrency Each core in the computer can only execute a single program. computer concurrently execute more than one program? How can a 9.1 Process Scheduling Definition 9.1 (Process).
Chapter 9 Processes & Concurrency Each core in the computer can only execute a single program. computer concurrently execute more than one program? How can a 9.1 Process Scheduling Definition 9.1 (Process).
Page 1. Goals for Today. Atomic Read-Modify-Write instructions. Examples of Read-Modify-Write
 Goals for Today CS162 Operating Systems and Systems Programming Lecture 5 Atomic instruction sequence Continue with Synchronization Abstractions Semaphores, Monitors and condition variables Semaphores,
Goals for Today CS162 Operating Systems and Systems Programming Lecture 5 Atomic instruction sequence Continue with Synchronization Abstractions Semaphores, Monitors and condition variables Semaphores,
Processes & Concurrency
 9.2. THREADS 107 The scheduler makes the decision which processes are running at any point in time, see Figure 9.3. Chapter 9 Processes & Concurrency Each core in the computer can only execute a single
9.2. THREADS 107 The scheduler makes the decision which processes are running at any point in time, see Figure 9.3. Chapter 9 Processes & Concurrency Each core in the computer can only execute a single
Deviations are things that modify a thread s normal flow of control. Unix has long had signals, and these must be dealt with in multithreaded
 Deviations are things that modify a thread s normal flow of control. Unix has long had signals, and these must be dealt with in multithreaded improvements to Unix. There are actually two fairly different
Deviations are things that modify a thread s normal flow of control. Unix has long had signals, and these must be dealt with in multithreaded improvements to Unix. There are actually two fairly different
Silberschatz and Galvin Chapter 6
 Silberschatz and Galvin Chapter 6 Process Synchronization CPSC 410--Richard Furuta 2/26/99 1 Topics discussed Process synchronization Mutual exclusion--hardware Higher-level abstractions Ð Semaphores Ð
Silberschatz and Galvin Chapter 6 Process Synchronization CPSC 410--Richard Furuta 2/26/99 1 Topics discussed Process synchronization Mutual exclusion--hardware Higher-level abstractions Ð Semaphores Ð
A Brief Introduction to OS/2 Multithreading
 A Brief Introduction to OS/2 Multithreading Jaroslav Kaƒer jkacer@kiv.zcu.cz University of West Bohemia Faculty of Applied Sciences Department of Computer Science and Engineering Why Use Parallelism? Performance
A Brief Introduction to OS/2 Multithreading Jaroslav Kaƒer jkacer@kiv.zcu.cz University of West Bohemia Faculty of Applied Sciences Department of Computer Science and Engineering Why Use Parallelism? Performance
CS370 Operating Systems
 CS370 Operating Systems Colorado State University Yashwant K Malaiya Fall 2017 Lecture 11 Slides based on Text by Silberschatz, Galvin, Gagne Various sources 1 1 FAQ Multilevel Feedback Queue: Q0, Q1,
CS370 Operating Systems Colorado State University Yashwant K Malaiya Fall 2017 Lecture 11 Slides based on Text by Silberschatz, Galvin, Gagne Various sources 1 1 FAQ Multilevel Feedback Queue: Q0, Q1,
Chapter 6 Concurrency: Deadlock and Starvation
 Operating Systems: Internals and Design Principles Chapter 6 Concurrency: Deadlock and Starvation Seventh Edition By William Stallings Operating Systems: Internals and Design Principles When two trains
Operating Systems: Internals and Design Principles Chapter 6 Concurrency: Deadlock and Starvation Seventh Edition By William Stallings Operating Systems: Internals and Design Principles When two trains
Synchronization: Semaphores
 Illinois Institute of Technology Lecture 26 4/25 solved Synchronization: Semaphores CS 536: Science of Programming, Spring 2018 A. Why Avoiding interference, while good, isn t the same as coordinating
Illinois Institute of Technology Lecture 26 4/25 solved Synchronization: Semaphores CS 536: Science of Programming, Spring 2018 A. Why Avoiding interference, while good, isn t the same as coordinating
Concurrent Server Design Multiple- vs. Single-Thread
 Concurrent Server Design Multiple- vs. Single-Thread Chuan-Ming Liu Computer Science and Information Engineering National Taipei University of Technology Fall 2007, TAIWAN NTUT, TAIWAN 1 Examples Using
Concurrent Server Design Multiple- vs. Single-Thread Chuan-Ming Liu Computer Science and Information Engineering National Taipei University of Technology Fall 2007, TAIWAN NTUT, TAIWAN 1 Examples Using
Processor speed. Concurrency Structure and Interpretation of Computer Programs. Multiple processors. Processor speed. Mike Phillips <mpp>
 Processor speed 6.037 - Structure and Interpretation of Computer Programs Mike Phillips Massachusetts Institute of Technology http://en.wikipedia.org/wiki/file:transistor_count_and_moore%27s_law_-
Processor speed 6.037 - Structure and Interpretation of Computer Programs Mike Phillips Massachusetts Institute of Technology http://en.wikipedia.org/wiki/file:transistor_count_and_moore%27s_law_-
Chapter 5: Process Synchronization. Operating System Concepts Essentials 2 nd Edition
 Chapter 5: Process Synchronization Silberschatz, Galvin and Gagne 2013 Chapter 5: Process Synchronization Background The Critical-Section Problem Peterson s Solution Synchronization Hardware Mutex Locks
Chapter 5: Process Synchronization Silberschatz, Galvin and Gagne 2013 Chapter 5: Process Synchronization Background The Critical-Section Problem Peterson s Solution Synchronization Hardware Mutex Locks
Nondeterministic Programming
 6.172 Performance Engineering of Software Systems LECTURE 15 Nondeterministic Programming Charles E. Leiserson November 2, 2010 2010 Charles E. Leiserson 1 Determinism Definition. A program is deterministic
6.172 Performance Engineering of Software Systems LECTURE 15 Nondeterministic Programming Charles E. Leiserson November 2, 2010 2010 Charles E. Leiserson 1 Determinism Definition. A program is deterministic
Concurrent Programming
 Concurrent Programming is Hard! Concurrent Programming Kai Shen The human mind tends to be sequential Thinking about all possible sequences of events in a computer system is at least error prone and frequently
Concurrent Programming is Hard! Concurrent Programming Kai Shen The human mind tends to be sequential Thinking about all possible sequences of events in a computer system is at least error prone and frequently
Concurrency: a crash course
 Chair of Software Engineering Carlo A. Furia, Marco Piccioni, Bertrand Meyer Concurrency: a crash course Concurrent computing Applications designed as a collection of computational units that may execute
Chair of Software Engineering Carlo A. Furia, Marco Piccioni, Bertrand Meyer Concurrency: a crash course Concurrent computing Applications designed as a collection of computational units that may execute
Semaphores Semaphores: A Definition
 23 Semaphores As we know now, one needs both locks and condition variables to solve a broad range of relevant and interesting concurrency problems. The first person who realized this years ago was Edsger
23 Semaphores As we know now, one needs both locks and condition variables to solve a broad range of relevant and interesting concurrency problems. The first person who realized this years ago was Edsger
Process Synchronization(2)
") EECS 3221.3 Operating System Fundamentals No.6 Process Synchronization(2) Prof. Hui Jiang Dept of Electrical Engineering and Computer Science, York University Semaphores Problems with the software solutions.
EECS 3221.3 Operating System Fundamentals No.6 Process Synchronization(2) Prof. Hui Jiang Dept of Electrical Engineering and Computer Science, York University Semaphores Problems with the software solutions.
Page 1. Challenges" Concurrency" CS162 Operating Systems and Systems Programming Lecture 4. Synchronization, Atomic operations, Locks"
 CS162 Operating Systems and Systems Programming Lecture 4 Synchronization, Atomic operations, Locks" January 30, 2012 Anthony D Joseph and Ion Stoica http://insteecsberkeleyedu/~cs162 Space Shuttle Example"
CS162 Operating Systems and Systems Programming Lecture 4 Synchronization, Atomic operations, Locks" January 30, 2012 Anthony D Joseph and Ion Stoica http://insteecsberkeleyedu/~cs162 Space Shuttle Example"
Synchronized Methods of Old Versions of Java
 Administrivia Assignment #4 is out Due Thursday April 8, 10:00pm no late assignments will be accepted Sign up in labs next week for a demo time In case you hadn t noticed Classes end Thursday April 15
Administrivia Assignment #4 is out Due Thursday April 8, 10:00pm no late assignments will be accepted Sign up in labs next week for a demo time In case you hadn t noticed Classes end Thursday April 15