Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
|
|
|
- Dulcie Jackson
- 6 years ago
- Views:
Transcription

1 Professor William Hoff Dept of Electrical Engineering &Computer Science 1
2 Detecting Square Markers using OpenCV 2

3 Square Fiducial Markers Square markers are popular in augmented reality applications: They are easy to detect The pose of the marker can be estimated Each marker can have a unique id There can be hundreds or thousands of different unique id s. ARTag marker Fiala, Mark. "ARTag, a fiducial marker system using digital techniques." and Pattern Recognition, CVPR IEEE Computer Society Conference on. Vol. 2. IEEE,
 The further apart the markers are (in terms of the number of bits that differ), the more error correction can be done 4")
4 ArUco Markers You can create a dictionary of markers for your application, specifying Number of bits (e.g., 4x4, 5x5, 6x6, 7x7) The number of markers in the dictionary (e.g., 50, 100, 250, 1000) The further apart the markers are (in terms of the number of bits that differ), the more error correction can be done 4
5 Marker Recognition First detect the black square: Threshold the image (using global or adaptive) Find contours around all black regions Approximate the contours by line segments; keep only contours that have exactly four line segments this is a candidate square marker Transform the image of the candidate marker to an orthophoto Reading the id Threshold the orthophoto Divide into a NxN grid, determine if each cell is 0 or 1 Attempt to find that pattern in the dictionary (or one that is close) 5
6 approxpolydp Useful OpenCV Function void cv::approxpolydp( InputArray curve, OutputArray approxcurve, double epsilon, bool closed) Approximates a polygonal curve(s) with the specified precision. Example: std::vector<cv::point> approxcurve; // Max allowed distance between original curve and its approximation. double eps = contours[i].size() * 0.01; cv::approxpolydp(contours[i], approxcurve, eps, true); 6
7 #include <opencv2/opencv.hpp> // This function tries to find black squares in the image. // It returns a vector of squares, where each square is represented // as a vector of four points, arranged in counter clockwise order. std::vector< std::vector<cv::point2f> > findsquares(cv::mat imageinput) { // Convert to gray if input is color. cv::mat imageinputgray; if (imageinput.channels() == 3) cv::cvtcolor(imageinput, imageinputgray, cv::color_bgr2gray); else imageinputgray = imageinput; This is a function called findsquares which finds candidate squares in the image (1 of 3) // Do adaptive threshold... this compares each pixel to a local // mean of the neighborhood. The result is a binary image, where // dark areas of the original image are now white (1's). cv::mat imagethresh; adaptivethreshold(imageinputgray, imagethresh, // output thresholded image 255, // output value where condition met cv::adaptive_thresh_gaussian_c, // local neighborhood cv::thresh_binary_inv, // threshold_type invert 31, // blocksize (any large number) 0); // a constant to subtract from mean // Apply morphological operations to get rid of small (noise) regions cv::mat structuringelmt = cv::getstructuringelement(cv::morph_ellipse, cv::size(3, 3)); cv::mat imageopen; morphologyex(imagethresh, imageopen, cv::morph_open, structuringelmt); cv::mat imageclose; morphologyex(imageopen, imageclose, cv::morph_close, structuringelmt); 7
8 // Find contours std::vector<std::vector<cv::point>> contours; std::vector<cv::vec4i> hierarchy; cv::findcontours( imageclose, // input image (is destroyed) contours, // output vector of contours hierarchy, // hierarchical representation CV_RETR_CCOMP, // retrieve all contours CV_CHAIN_APPROX_NONE); // all pixels of each contours // Iterate through all the top level contours and find squares. std::vector< std::vector<cv::point2f> > squares; // output squares This is a function called findsquares which finds candidate squares in the image (2 of 3) for (int i = 0; i < (int)contours.size(); i++) { // Contour should be greater than some minimum area double a = contourarea(contours[i]); if (!(a > 100)) continue; // Reject the ith contour if it doesn't have a child inside. if (hierarchy[i][2] < 0) continue; //// Check the ratio of area to perimeter squared: R = 16*A/P^2. //// R is equal to 1 for a square. //double P = arclength(contours[i], true); //double A = contourarea(contours[i]); //if (16 * A / (P*P) < 0.75) // continue; // Approximate contour by a polygon. std::vector<cv::point> approxcurve; // Maximum allowed distance between the original curve and its approximation. double eps = contours[i].size() * 0.01; cv::approxpolydp(contours[i], approxcurve, eps, true); // We interested only in polygons that contain only four points. if (approxcurve.size()!= 4) continue; 8
9 // Ok, I think we have a square! Create the list of corner points. std::vector<cv::point2f> squarecorners; for (int j = 0; j < 4; j++) squarecorners.push_back(cv::point2f(approxcurve[j])); // Sort the points in counter clockwise order. Trace a line between the // first and second point. If the third point is on the right side, then // the points are anticlockwise. cv::point v1 = squarecorners[1] squarecorners[0]; cv::point v2 = squarecorners[2] squarecorners[0]; double o = (v1.x * v2.y) (v1.y * v2.x); if (o < 0.0) std::swap(squarecorners[1], squarecorners[3]); This is a function called findsquares which finds candidate squares in the image (3 of 3) // Store the square in our list of squares. squares.push_back(squarecorners); return squares; 9
10 Transform Marker to Orthophoto Find the projective transform (homography) that transforms the subimage of the marker to an orthophoto Use OpenCV functions getperspectivetransform and warpperspective Example: // Create a list of "ortho" square corner points. std::vector<cv::point2f> squareortho; squareortho.push_back(cv::point2f(0, 0)); squareortho.push_back(cv::point2f(120, 0)); squareortho.push_back(cv::point2f(120, 120)); squareortho.push_back(cv::point2f(0, 120)); // Find the perspective transfomation that brings current marker to rectangular form. cv::mat H = cv::getperspectivetransform(squarecorners, squareortho); // Transform image to get an orthophoto square image. cv::mat imagesquare; cv::size imagesquaresize(120, 120); cv::warpperspective(imageinputgray, imagesquare, H, imagesquaresize); 10
11 Main program to find candidate squares /* Detect squares in an image. */ #include <iostream> #include <windows.h> // For Sleep() #include <opencv2/opencv.hpp> Main program (1 of 3) // Function prototypes. std::vector< std::vector<cv::point2f> > findsquares(cv::mat imageinput); int main(int argc, char* argv[]) { printf("hit ESC key to quit\n"); cv::videocapture cap(1); // open the camera //cv::videocapture cap( myvideo.avi"); // open the video file if (!cap.isopened()) { // check if we succeeded printf("error can't open the camera or video; hit any key to quit\n"); system("pause"); return EXIT_FAILURE; while (true) { cv::mat imageinput; cap >> imageinput; if (imageinput.empty()) break; cv::mat imageinputgray; cv::cvtcolor(imageinput, imageinputgray, cv::color_bgr2gray); 11
12 Main program (continued) std::vector<std::vector<cv::point2f>> squares; squares = findsquares(imageinputgray); printf("number of possible squares found = %d\n", squares.size()); if (squares.size() == 0) { // Didn't find any squares. Just display the image. cv::imshow("my Image", imageinput); if (cv::waitkey(1) == 27) break; // hit ESC (ascii code 27) to quit Main program (2 of 3) // Continue to the next iteration of the main loop. continue; for (unsigned int isquare = 0; isquare < squares.size(); isquare++) { std::vector<cv::point2f> squarecorners = squares[isquare]; // Draw square as a sequence of line segments. cv::scalar color = cv::scalar(0, 255, 0); for (int j = 0; j < 4; j++) { cv::point p1 = squarecorners[j]; cv::point p2 = squarecorners[(j + 1) % 4]; cv::line(imageinput, p1, p2, color, 2, // thickness 8); // line connectivity 12
13 Main program (continued) // Create a list of "ortho" square corner points. std::vector<cv::point2f> squareortho; squareortho.push_back(cv::point2f(0, 0)); squareortho.push_back(cv::point2f(120, 0)); squareortho.push_back(cv::point2f(120, 120)); squareortho.push_back(cv::point2f(0, 120)); Main program (3 of 3) // Find the perspective transformation that brings current marker to rectangular form. cv::mat H = cv::getperspectivetransform(squarecorners, squareortho); // Transform image to get an orthophoto square image. cv::mat imagesquare; cv::size imagesquaresize(120, 120); cv::warpperspective(imageinputgray, imagesquare, H, imagesquaresize); cv::imshow("marker", imagesquare); // Show the image. cv::imshow("my Image", imageinput); // Wait for xx ms (0 means wait until a keypress) if (cv::waitkey(1) == 27) break; // hit ESC (ascii code 27) to quit return EXIT_SUCCESS; 13
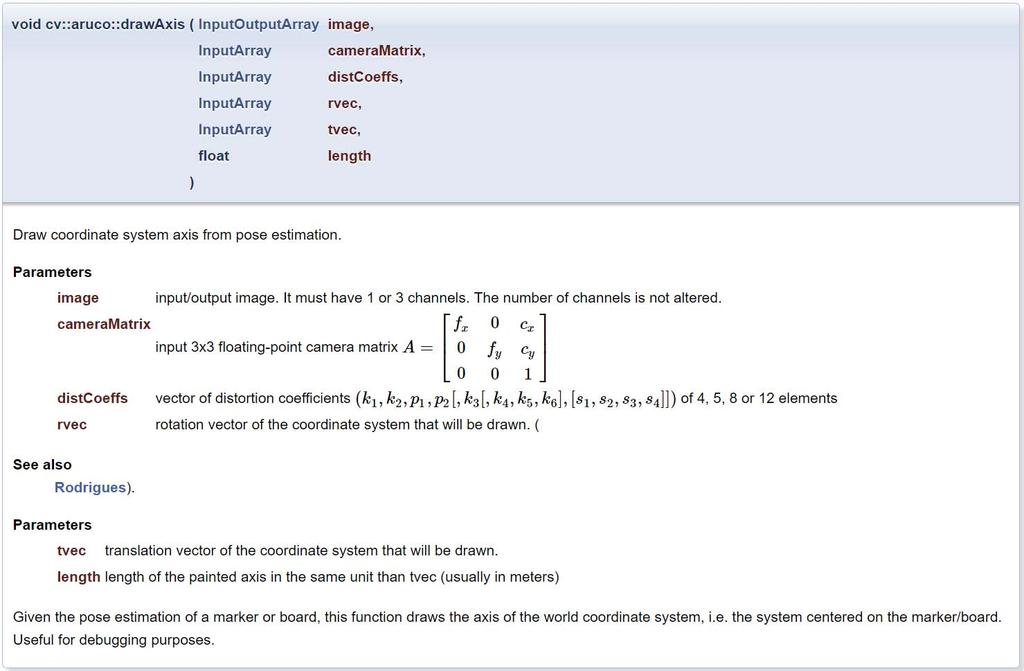
14 ArUco Library OpenCV has a library module for ArUco marker detection Key functions, described on following slides (see documentation for full details): getpredefineddictionary detectmarkers drawdetectedmarkers estimateposesinglemarkers drawaxis 14
15 getpredefineddictionary Ptr<Dictionary> cv::aruco::getpredefineddictionary ( PREDEFINED_DICTIONARY_NAME name ) Returns one of the predefined dictionaries defined in PREDEFINED_DICTIONARY_NAME Dictionary name indicates: Size of marker (e.g, 4x4 bits) Number of markers in dictionary (e.g., 100) DICT_4X4_50 DICT_4X4_100 DICT_4X4_250 DICT_4X4_1000 DICT_5X5_50 DICT_5X5_100 DICT_5X5_250 DICT_5X5_1000 DICT_6X6_50 DICT_6X6_100 DICT_6X6_250 DICT_6X6_1000 DICT_7X7_50 DICT_7X7_100 DICT_7X7_250 DICT_7X7_

16 detectmarkers 16
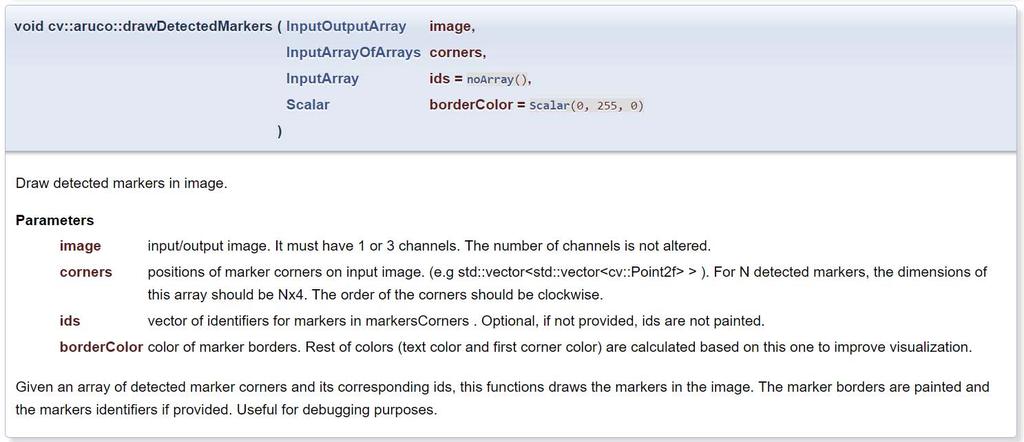
17 drawdetectedmarkers 17
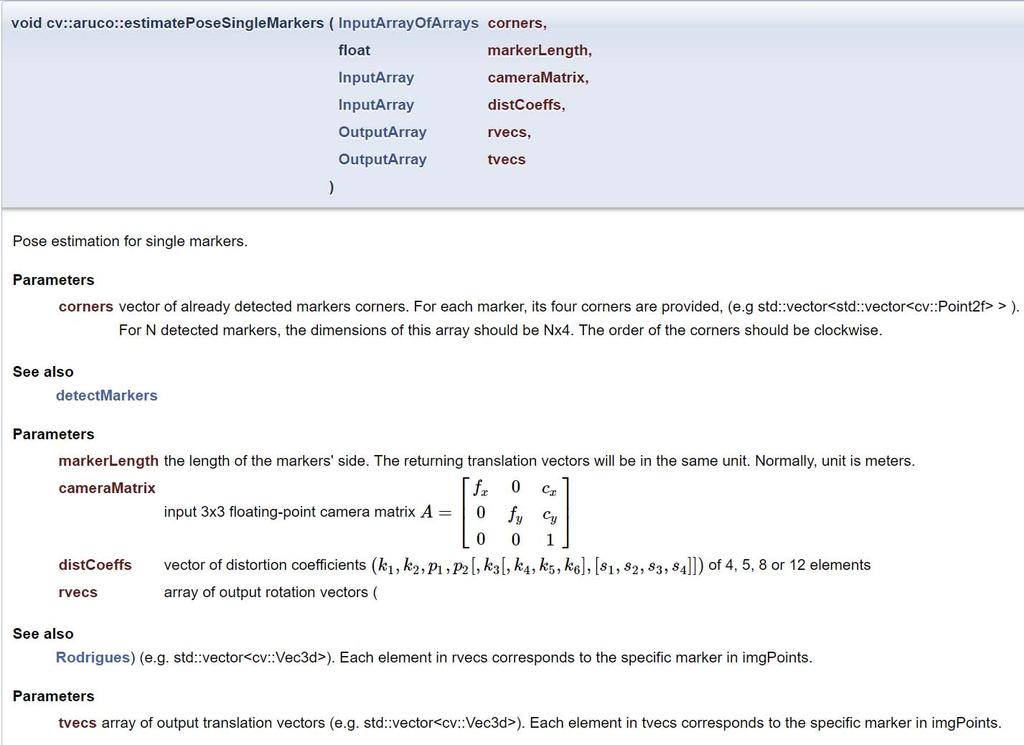
18 estimateposesinglemarkers 18
19 19
20 #include <iostream> #include <opencv2/opencv.hpp> #include <opencv2/aruco.hpp> #include <windows.h> // For Sleep() // Length of one side of a square marker. const float markerlength = 2.0; int main(int argc, char* argv[]) { printf("this program detects ArUco markers.\n"); printf("hit the ESC key to quit.\n"); Program to detect ArUco markers (1 of 3) // Camera intrinsic matrix (fill in your actual values here). double K_[3][3] = { { 675, 0, 320, { 0, 675, 240, { 0, 0, 1 ; cv::mat K = cv::mat(3, 3, CV_64F, K_).clone(); // Distortion coeffs (fill in your actual values here). double dist_[] = { 0, 0, 0, 0, 0 ; cv::mat distcoeffs = cv::mat(5, 1, CV_64F, dist_).clone(); cv::videocapture cap(0); // open the camera //cv::videocapture cap("video.avi"); // or open the video file if (!cap.isopened()) { // check if we succeeded printf("error can't open the camera or video; hit any key to quit\n"); system("pause"); return EXIT_FAILURE; // Let's just see what the image size is from this camera or file. double WIDTH = cap.get(cv_cap_prop_frame_width); double HEIGHT = cap.get(cv_cap_prop_frame_height); printf("image width=%f, height=%f\n", WIDTH, HEIGHT); 20
21 // Allocate image. cv::mat image; cv::ptr<cv::aruco::dictionary> dictionary = cv::aruco::getpredefineddictionary(cv::aruco::dict_4x4_100); cv::ptr<cv::aruco::detectorparameters> detectorparams = cv::aruco::detectorparameters::create(); // Run an infinite loop until user hits the ESC key. while (1) { cap >> image; // get image from camera if (image.empty()) break; std::vector< int > markerids; std::vector< std::vector<cv::point2f> > markercorners, rejectedcandidates; cv::aruco::detectmarkers( image, // input image dictionary, // type of markers that will be searched for markercorners, // output vector of marker corners markerids, // detected marker IDs detectorparams, // algorithm parameters rejectedcandidates); Program to detect ArUco markers (2 of 3) if (markerids.size() > 0) { // Draw all detected markers. cv::aruco::drawdetectedmarkers(image, markercorners, markerids); std::vector< cv::vec3d > rvecs, tvecs; cv::aruco::estimateposesinglemarkers( markercorners, // vector of already detected markers corners markerlength, // length of the marker's side K, // input 3x3 floating point instrinsic camera matrix K distcoeffs, // vector of distortion coefficients of 4, 5, 8 or 12 elements rvecs, // array of output rotation vectors tvecs); // array of output translation vectors 21
22 // Display pose for the detected marker with id=0. for (unsigned int i = 0; i < markerids.size(); i++) { if (markerids[i] == 0) { cv::vec3d r = rvecs[i]; cv::vec3d t = tvecs[i]; // Draw coordinate axes. cv::aruco::drawaxis(image, K, distcoeffs, // camera parameters r, t, // marker pose 0.5*markerLength); // length of the axes to be drawn Program to detect ArUco markers (3 of 3) // Draw a symbol in the upper right corner of the detected marker. std::vector<cv::point3d> pointsinterest; pointsinterest.push_back(cv::point3d(markerlength/2, markerlength/2, 0)); std::vector<cv::point2d> p; cv::projectpoints(pointsinterest, rvecs[i], tvecs[i], K, distcoeffs, p); cv::drawmarker(image, p[0], // image point cv::scalar(0, 255, 255), // color cv::marker_star, // type of marker to draw 20, // marker size 2); // thickness cv::imshow("image", image); // show image // Wait for x ms (0 means wait until a keypress). // Returns 1 if no key is hit. char key = cv::waitkey(1); if (key == 27) break; // ESC is ascii 27 return EXIT_SUCCESS; 22
23 Extra Stuff This function converts the representation of an orientation from angle axis to XYZ angles (see the lecture slides on 3D 3D transformations) // A function to convert the representation of an orientation from angle axis to XYZ angles. std::vector<double> calcvec(cv::vec3d rvec) { cv::mat R; cv::rodrigues(rvec, R); // convert to rotation matrix double ax, ay, az; ay = atan2( R.at<double>(2, 0), pow(pow(r.at<double>(0, 0), 2) + pow(r.at<double>(1, 0), 2), 0.5)); double cy = cos(ay); if (abs(cy) < 1e 9) { // Degenerate solution. az = 0.0; ax = atan2(r.at<double>(0, 1), R.at<double>(1, 1)); if (ay < 0) ax = ax; else { az = atan2(r.at<double>(1, 0) / cy, R.at<double>(0, 0) / cy); ax = atan2(r.at<double>(2, 1) / cy, R.at<double>(2, 2) / cy); std::vector<double> result; result.push_back(ax); result.push_back(ay); result.push_back(az); return result; 23
24 Extra Stuff This code snippet will print the pose (as a text string) onto an image. // Assume that r,t are the rotation vector and the translation; e.g. // from solvepnp or ArUco's estimateposesinglemarkers. std::vector<double> a = calcvec(r); std::string label = " ax=" + std::to_string(a[0]).substr(0, 5) + " ay=" + std::to_string(a[1]).substr(0, 5) + " az=" + std::to_string(a[2]).substr(0, 5) + " tx=" + std::to_string(t[0]).substr(0, 5) + " ty=" + std::to_string(t[1]).substr(0, 5) + " tz=" + std::to_string(t[2]).substr(0, 5); int baseline = 0; cv::size textsize = gettextsize(label, cv::font_hershey_plain, // font face 1.0, // font scale 1, // thickness &baseline); // Draw the background rectangle. cv::rectangle(image, cv::point(10, 30), // lower left corner cv::point(textsize.width + 10, 8), // upper right corner cv::scalar(255, 255, 255), // color CV_FILLED); // Fill the rectangle puttext(image, label, cv::point(10, 25), cv::font_hershey_plain, // font face 1.0, // font scale cv::scalar(0, 0, 0), // font color 1); // thickness 24
CSCI 512 / EENG 512 Computer Vision Spring Lab 6. February 17, 2016
 Lab 6 February 17, 2016 NAME NAME This lab assignment should be done in teams of two. Go through the exercises below and show me your results. If you don t finish by the end of today s class, you may show
Lab 6 February 17, 2016 NAME NAME This lab assignment should be done in teams of two. Go through the exercises below and show me your results. If you don t finish by the end of today s class, you may show
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Pose Estimation in OpenCV 2 Pose Estimation of a Known Model Assume we have a known object model,
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Pose Estimation in OpenCV 2 Pose Estimation of a Known Model Assume we have a known object model,
OpenCV. Basics. Department of Electrical Engineering and Computer Science
 OpenCV Basics 1 OpenCV header file OpenCV namespace OpenCV basic structures Primitive data types Point_ Size_ Vec Scalar_ Mat Basics 2 OpenCV Header File #include .hpp is a convention
OpenCV Basics 1 OpenCV header file OpenCV namespace OpenCV basic structures Primitive data types Point_ Size_ Vec Scalar_ Mat Basics 2 OpenCV Header File #include .hpp is a convention
Assignment 1 - Use OpenCV for camera calibration
 ME/CS 132A_Winter 2015 Theory Assignment 1 - Use OpenCV for camera calibration For the distortion OpenCV takes into account the radial and tangential factors. For the radial factor one uses the following
ME/CS 132A_Winter 2015 Theory Assignment 1 - Use OpenCV for camera calibration For the distortion OpenCV takes into account the radial and tangential factors. For the radial factor one uses the following
Outline. Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion. Media IC & System Lab Po-Chen Wu 2
 Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
An Implementation on Object Move Detection Using OpenCV
 An Implementation on Object Move Detection Using OpenCV Professor: Dr. Ali Arya Reported by: Farzin Farhadi-Niaki Department of Systems and Computer Engineering Carleton University Ottawa, Canada I. INTRODUCTION
An Implementation on Object Move Detection Using OpenCV Professor: Dr. Ali Arya Reported by: Farzin Farhadi-Niaki Department of Systems and Computer Engineering Carleton University Ottawa, Canada I. INTRODUCTION
Object Move Controlling in Game Implementation Using OpenCV
 Object Move Controlling in Game Implementation Using OpenCV Professor: Dr. Ali Arya Reported by: Farzin Farhadi-Niaki Lindsay Coderre Department of Systems and Computer Engineering Carleton University
Object Move Controlling in Game Implementation Using OpenCV Professor: Dr. Ali Arya Reported by: Farzin Farhadi-Niaki Lindsay Coderre Department of Systems and Computer Engineering Carleton University
EXAMINATIONS 2017 TRIMESTER 2
 EXAMINATIONS 2017 TRIMESTER 2 CGRA 151 INTRODUCTION TO COMPUTER GRAPHICS Time Allowed: TWO HOURS CLOSED BOOK Permitted materials: Silent non-programmable calculators or silent programmable calculators
EXAMINATIONS 2017 TRIMESTER 2 CGRA 151 INTRODUCTION TO COMPUTER GRAPHICS Time Allowed: TWO HOURS CLOSED BOOK Permitted materials: Silent non-programmable calculators or silent programmable calculators
Augmented reality with the ARToolKit FMA175 version 1.3 Supervisor Petter Strandmark By Olle Landin
 Augmented reality with the ARToolKit FMA75 version.3 Supervisor Petter Strandmark By Olle Landin Ic7ol3@student.lth.se Introduction Agumented Reality (AR) is the overlay of virtual computer graphics images
Augmented reality with the ARToolKit FMA75 version.3 Supervisor Petter Strandmark By Olle Landin Ic7ol3@student.lth.se Introduction Agumented Reality (AR) is the overlay of virtual computer graphics images
CS184 : Foundations of Computer Graphics Professor David Forsyth Final Examination
 CS184 : Foundations of Computer Graphics Professor David Forsyth Final Examination (Total: 100 marks) Figure 1: A perspective view of a polyhedron on an infinite plane. Cameras and Perspective Rendering
CS184 : Foundations of Computer Graphics Professor David Forsyth Final Examination (Total: 100 marks) Figure 1: A perspective view of a polyhedron on an infinite plane. Cameras and Perspective Rendering
Introduction to OpenCV
 Introduction to OpenCV Stefan Holzer, David Joseph Tan Chair for Computer Aided Medical Procedures Technische Universität München Germany Introduction to OpenCV Where to get OpenCV?
Introduction to OpenCV Stefan Holzer, David Joseph Tan Chair for Computer Aided Medical Procedures Technische Universität München Germany Introduction to OpenCV Where to get OpenCV?
CS184 : Foundations of Computer Graphics Professor David Forsyth Final Examination (Total: 100 marks)
") CS184 : Foundations of Computer Graphics Professor David Forsyth Final Examination (Total: 100 marks) Cameras and Perspective Figure 1: A perspective view of a polyhedron on an infinite plane. Rendering
CS184 : Foundations of Computer Graphics Professor David Forsyth Final Examination (Total: 100 marks) Cameras and Perspective Figure 1: A perspective view of a polyhedron on an infinite plane. Rendering
Solution Notes. COMP 151: Terms Test
 Family Name:.............................. Other Names:............................. ID Number:............................... Signature.................................. Solution Notes COMP 151: Terms
Family Name:.............................. Other Names:............................. ID Number:............................... Signature.................................. Solution Notes COMP 151: Terms
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Extracting Layers and Recognizing Features for Automatic Map Understanding. Yao-Yi Chiang
 Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Fundamental Matrix 2 Recall the Essential Matrix Is the matrix E, that relates the image of a point
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Fundamental Matrix 2 Recall the Essential Matrix Is the matrix E, that relates the image of a point
Real Time Data Plotting
 Real Time Data Plotting Introduction This lesson will show how to write a program plot data on a X-Y graph. On the Arduino, write a program to sample a sensor and print the voltage to the Serial interface.
Real Time Data Plotting Introduction This lesson will show how to write a program plot data on a X-Y graph. On the Arduino, write a program to sample a sensor and print the voltage to the Serial interface.
EE368 Project: Visual Code Marker Detection
 EE368 Project: Visual Code Marker Detection Kahye Song Group Number: 42 Email: kahye@stanford.edu Abstract A visual marker detection algorithm has been implemented and tested with twelve training images.
EE368 Project: Visual Code Marker Detection Kahye Song Group Number: 42 Email: kahye@stanford.edu Abstract A visual marker detection algorithm has been implemented and tested with twelve training images.
Midterm Exam Fundamentals of Computer Graphics (COMP 557) Thurs. Feb. 19, 2015 Professor Michael Langer
 Thurs. Feb. 19, 2015 Professor Michael Langer") Midterm Exam Fundamentals of Computer Graphics (COMP 557) Thurs. Feb. 19, 2015 Professor Michael Langer The exam consists of 10 questions. There are 2 points per question for a total of 20 points. You
Midterm Exam Fundamentals of Computer Graphics (COMP 557) Thurs. Feb. 19, 2015 Professor Michael Langer The exam consists of 10 questions. There are 2 points per question for a total of 20 points. You
Solving a 2D Maze. const int WIDTH = 10; const int HEIGHT = 10;
 Solving a 2D Maze Let s use a 2D array to represent a maze. Let s start with a 10x10 array of char. The array of char can hold either X for a wall, for a blank, and E for the exit. Initially we can hard-code
Solving a 2D Maze Let s use a 2D array to represent a maze. Let s start with a 10x10 array of char. The array of char can hold either X for a wall, for a blank, and E for the exit. Initially we can hard-code
GeoGebra. 10 Lessons. maths.com. Gerrit Stols. For more info and downloads go to:
 GeoGebra in 10 Lessons For more info and downloads go to: http://school maths.com Gerrit Stols Acknowledgements Download GeoGebra from http://www.geogebra.org GeoGebra is dynamic mathematics open source
GeoGebra in 10 Lessons For more info and downloads go to: http://school maths.com Gerrit Stols Acknowledgements Download GeoGebra from http://www.geogebra.org GeoGebra is dynamic mathematics open source
Image Processing (1) Basic Concepts and Introduction of OpenCV
 Basic Concepts and Introduction of OpenCV") Intelligent Control Systems Image Processing (1) Basic Concepts and Introduction of OpenCV Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Image Processing (1) Basic Concepts and Introduction of OpenCV Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Project report Augmented reality with ARToolKit
 Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
EXAMINATIONS 2016 TRIMESTER 2
 EXAMINATIONS 2016 TRIMESTER 2 CGRA 151 INTRODUCTION TO COMPUTER GRAPHICS Time Allowed: TWO HOURS CLOSED BOOK Permitted materials: Silent non-programmable calculators or silent programmable calculators
EXAMINATIONS 2016 TRIMESTER 2 CGRA 151 INTRODUCTION TO COMPUTER GRAPHICS Time Allowed: TWO HOURS CLOSED BOOK Permitted materials: Silent non-programmable calculators or silent programmable calculators
Motic Images Plus 3.0 ML Software. Windows OS User Manual
 Motic Images Plus 3.0 ML Software Windows OS User Manual Motic Images Plus 3.0 ML Software Windows OS User Manual CONTENTS (Linked) Introduction 05 Menus and tools 05 File 06 New 06 Open 07 Save 07 Save
Motic Images Plus 3.0 ML Software Windows OS User Manual Motic Images Plus 3.0 ML Software Windows OS User Manual CONTENTS (Linked) Introduction 05 Menus and tools 05 File 06 New 06 Open 07 Save 07 Save
S206E Lecture 3, 5/15/2017, Rhino 2D drawing an overview
 Copyright 2017, Chiu-Shui Chan. All Rights Reserved. S206E057 Spring 2017 Rhino 2D drawing is very much the same as it is developed in AutoCAD. There are a lot of similarities in interface and in executing
Copyright 2017, Chiu-Shui Chan. All Rights Reserved. S206E057 Spring 2017 Rhino 2D drawing is very much the same as it is developed in AutoCAD. There are a lot of similarities in interface and in executing
Computer Graphics Hands-on
 Computer Graphics Hands-on Two-Dimensional Transformations Objectives Visualize the fundamental 2D geometric operations translation, rotation about the origin, and scale about the origin Learn how to compose
Computer Graphics Hands-on Two-Dimensional Transformations Objectives Visualize the fundamental 2D geometric operations translation, rotation about the origin, and scale about the origin Learn how to compose
Computer Graphics. - Rasterization - Philipp Slusallek
 Computer Graphics - Rasterization - Philipp Slusallek Rasterization Definition Given some geometry (point, 2D line, circle, triangle, polygon, ), specify which pixels of a raster display each primitive
Computer Graphics - Rasterization - Philipp Slusallek Rasterization Definition Given some geometry (point, 2D line, circle, triangle, polygon, ), specify which pixels of a raster display each primitive
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Adding Objects Creating Shapes Adding. Text Printing and Exporting Getting Started Creating a. Creating Shapes Adding Text Printing and Exporting
 Getting Started Creating a Workspace Pages, Masters and Guides Adding Objects Creating Shapes Adding Text Printing and Exporting Getting Started Creating a Workspace Pages, Masters and Guides Adding Objects
Getting Started Creating a Workspace Pages, Masters and Guides Adding Objects Creating Shapes Adding Text Printing and Exporting Getting Started Creating a Workspace Pages, Masters and Guides Adding Objects
Real Time Image Processing Multimedia Skype Client
 1 Real Time Image Processing Multimedia Skype Client Reinhard Klapfer Dani Martinez Capilla I. INTRODUCTION Augmented Reality (AR) is one of the most researched areas in Computer Vision Science nowadays.
1 Real Time Image Processing Multimedia Skype Client Reinhard Klapfer Dani Martinez Capilla I. INTRODUCTION Augmented Reality (AR) is one of the most researched areas in Computer Vision Science nowadays.
Common Misunderstandings from Exam 1 Material
 Common Misunderstandings from Exam 1 Material Kyle Dewey Stack and Heap Allocation with Pointers char c = c ; char* p1 = malloc(sizeof(char)); char** p2 = &p1; Where is c allocated? Where is p1 itself
Common Misunderstandings from Exam 1 Material Kyle Dewey Stack and Heap Allocation with Pointers char c = c ; char* p1 = malloc(sizeof(char)); char** p2 = &p1; Where is c allocated? Where is p1 itself
Multimedia Retrieval Exercise Course 2 Basic Knowledge about Images in OpenCV
 Multimedia Retrieval Exercise Course 2 Basic Knowledge about Images in OpenCV Kimiaki Shirahama, D.E. Research Group for Pattern Recognition Institute for Vision and Graphics University of Siegen, Germany
Multimedia Retrieval Exercise Course 2 Basic Knowledge about Images in OpenCV Kimiaki Shirahama, D.E. Research Group for Pattern Recognition Institute for Vision and Graphics University of Siegen, Germany
CSE/EE-576, Final Project
 1 CSE/EE-576, Final Project Torso tracking Ke-Yu Chen Introduction Human 3D modeling and reconstruction from 2D sequences has been researcher s interests for years. Torso is the main part of the human
1 CSE/EE-576, Final Project Torso tracking Ke-Yu Chen Introduction Human 3D modeling and reconstruction from 2D sequences has been researcher s interests for years. Torso is the main part of the human
Geometry. Zachary Friggstad. Programming Club Meeting
 Geometry Zachary Friggstad Programming Club Meeting Points #i n c l u d e typedef complex p o i n t ; p o i n t p ( 1. 0, 5. 7 ) ; p. r e a l ( ) ; // x component p. imag ( ) ; // y component
Geometry Zachary Friggstad Programming Club Meeting Points #i n c l u d e typedef complex p o i n t ; p o i n t p ( 1. 0, 5. 7 ) ; p. r e a l ( ) ; // x component p. imag ( ) ; // y component
 Tools of Design Select Mode vs. Text Mode Select Mode allows you to alter the position and size of both text and clipart Text Mode allows you change text size, font and characters but you CANNOT
Tools of Design Select Mode vs. Text Mode Select Mode allows you to alter the position and size of both text and clipart Text Mode allows you change text size, font and characters but you CANNOT
Paint/Draw Tools. Foreground color. Free-form select. Select. Eraser/Color Eraser. Fill Color. Color Picker. Magnify. Pencil. Brush.
 Paint/Draw Tools There are two types of draw programs. Bitmap (Paint) Uses pixels mapped to a grid More suitable for photo-realistic images Not easily scalable loses sharpness if resized File sizes are
Paint/Draw Tools There are two types of draw programs. Bitmap (Paint) Uses pixels mapped to a grid More suitable for photo-realistic images Not easily scalable loses sharpness if resized File sizes are
[10] Industrial DataMatrix barcodes recognition with a random tilt and rotating the camera
![[10] Industrial DataMatrix barcodes recognition with a random tilt and rotating the camera](/thumbs/84/90637441.jpg "[10] Industrial DataMatrix barcodes recognition with a random tilt and rotating the camera") [10] Industrial DataMatrix barcodes recognition with a random tilt and rotating the camera Image processing, pattern recognition 865 Kruchinin A.Yu. Orenburg State University IntBuSoft Ltd Abstract The
[10] Industrial DataMatrix barcodes recognition with a random tilt and rotating the camera Image processing, pattern recognition 865 Kruchinin A.Yu. Orenburg State University IntBuSoft Ltd Abstract The
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
03 Vector Graphics. Multimedia Systems. 2D and 3D Graphics, Transformations
 Multimedia Systems 03 Vector Graphics 2D and 3D Graphics, Transformations Imran Ihsan Assistant Professor, Department of Computer Science Air University, Islamabad, Pakistan www.imranihsan.com Lectures
Multimedia Systems 03 Vector Graphics 2D and 3D Graphics, Transformations Imran Ihsan Assistant Professor, Department of Computer Science Air University, Islamabad, Pakistan www.imranihsan.com Lectures
Tutorial 3: Constructive Editing (2D-CAD)
") (2D-CAD) The editing done up to now is not much different from the normal drawing board techniques. This section deals with commands to copy items we have already drawn, to move them and to make multiple
(2D-CAD) The editing done up to now is not much different from the normal drawing board techniques. This section deals with commands to copy items we have already drawn, to move them and to make multiple
Crush Around Augmented Reality Game Computer Vision and Image Processing for Mobile Platforms
 Crush Around Augmented Reality Game Computer Vision and Image Processing for Mobile Platforms Tomer Cagan cagan.tomer@post.idc.ac.il Ziv Levy levy.ziv@post.idc.ac.il School of Computer Science. The Interdisciplinary
Crush Around Augmented Reality Game Computer Vision and Image Processing for Mobile Platforms Tomer Cagan cagan.tomer@post.idc.ac.il Ziv Levy levy.ziv@post.idc.ac.il School of Computer Science. The Interdisciplinary
OpenCV. Rishabh Maheshwari Electronics Club IIT Kanpur
 OpenCV Rishabh Maheshwari Electronics Club IIT Kanpur Installing OpenCV Download and Install OpenCV 2.1:- http://sourceforge.net/projects/opencvlibrary/fi les/opencv-win/2.1/ Download and install Dev C++
OpenCV Rishabh Maheshwari Electronics Club IIT Kanpur Installing OpenCV Download and Install OpenCV 2.1:- http://sourceforge.net/projects/opencvlibrary/fi les/opencv-win/2.1/ Download and install Dev C++
CS 325 Computer Graphics
 CS 325 Computer Graphics 02 / 06 / 2012 Instructor: Michael Eckmann Today s Topics Questions? Comments? Antialiasing Polygons Interior points Fill areas tiling halftoning dithering Antialiasing Aliasing
CS 325 Computer Graphics 02 / 06 / 2012 Instructor: Michael Eckmann Today s Topics Questions? Comments? Antialiasing Polygons Interior points Fill areas tiling halftoning dithering Antialiasing Aliasing
Your Flowchart Secretary: Real-Time Hand-Written Flowchart Converter
 Your Flowchart Secretary: Real-Time Hand-Written Flowchart Converter Qian Yu, Rao Zhang, Tien-Ning Hsu, Zheng Lyu Department of Electrical Engineering { qiany, zhangrao, tiening, zhenglyu} @stanford.edu
Your Flowchart Secretary: Real-Time Hand-Written Flowchart Converter Qian Yu, Rao Zhang, Tien-Ning Hsu, Zheng Lyu Department of Electrical Engineering { qiany, zhangrao, tiening, zhenglyu} @stanford.edu
3ds Max Cottage Step 1. Always start out by setting up units: We re going with this setup as we will round everything off to one inch.
 3ds Max Cottage Step 1 Always start out by setting up units: We re going with this setup as we will round everything off to one inch. File/Import the CAD drawing Be sure Files of Type is set to all formats
3ds Max Cottage Step 1 Always start out by setting up units: We re going with this setup as we will round everything off to one inch. File/Import the CAD drawing Be sure Files of Type is set to all formats
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
For more info and downloads go to: Gerrit Stols
 For more info and downloads go to: http://school-maths.com Gerrit Stols Acknowledgements GeoGebra is dynamic mathematics open source (free) software for learning and teaching mathematics in schools. It
For more info and downloads go to: http://school-maths.com Gerrit Stols Acknowledgements GeoGebra is dynamic mathematics open source (free) software for learning and teaching mathematics in schools. It
Shadows in Computer Graphics
 Shadows in Computer Graphics Steven Janke November 2014 Steven Janke (Seminar) Shadows in Computer Graphics November 2014 1 / 49 Shadows (from Doom) Steven Janke (Seminar) Shadows in Computer Graphics
Shadows in Computer Graphics Steven Janke November 2014 Steven Janke (Seminar) Shadows in Computer Graphics November 2014 1 / 49 Shadows (from Doom) Steven Janke (Seminar) Shadows in Computer Graphics
#include <iostream> #include <algorithm> #include <cmath> using namespace std; int f1(int x, int y) { return (double)(x/y); }
 { return (double)(x/y); }") 1. (9 pts) Show what will be output by the cout s in this program. As in normal program execution, any update to a variable should affect the next statement. (Note: boolalpha simply causes Booleans to
1. (9 pts) Show what will be output by the cout s in this program. As in normal program execution, any update to a variable should affect the next statement. (Note: boolalpha simply causes Booleans to
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
CS 376b Computer Vision
 CS 376b Computer Vision 09 / 25 / 2014 Instructor: Michael Eckmann Today s Topics Questions? / Comments? Enhancing images / masks Cross correlation Convolution C++ Cross-correlation Cross-correlation involves
CS 376b Computer Vision 09 / 25 / 2014 Instructor: Michael Eckmann Today s Topics Questions? / Comments? Enhancing images / masks Cross correlation Convolution C++ Cross-correlation Cross-correlation involves
Computer Graphics: Two Dimensional Viewing
 Computer Graphics: Two Dimensional Viewing Clipping and Normalized Window By: A. H. Abdul Hafez Abdul.hafez@hku.edu.tr, 1 Outlines 1. End 2 Transformation between 2 coordinate systems To transform positioned
Computer Graphics: Two Dimensional Viewing Clipping and Normalized Window By: A. H. Abdul Hafez Abdul.hafez@hku.edu.tr, 1 Outlines 1. End 2 Transformation between 2 coordinate systems To transform positioned
Advanced Image Processing, TNM034 Optical Music Recognition
 Advanced Image Processing, TNM034 Optical Music Recognition Linköping University By: Jimmy Liikala, jimli570 Emanuel Winblad, emawi895 Toms Vulfs, tomvu491 Jenny Yu, jenyu080 1 Table of Contents Optical
Advanced Image Processing, TNM034 Optical Music Recognition Linköping University By: Jimmy Liikala, jimli570 Emanuel Winblad, emawi895 Toms Vulfs, tomvu491 Jenny Yu, jenyu080 1 Table of Contents Optical
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 14
 Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 14 Scan Converting Lines, Circles and Ellipses Hello everybody, welcome again
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 14 Scan Converting Lines, Circles and Ellipses Hello everybody, welcome again
Let s Make a Front Panel using FrontCAD
 Let s Make a Front Panel using FrontCAD By Jim Patchell FrontCad is meant to be a simple, easy to use CAD program for creating front panel designs and artwork. It is a free, open source program, with the
Let s Make a Front Panel using FrontCAD By Jim Patchell FrontCad is meant to be a simple, easy to use CAD program for creating front panel designs and artwork. It is a free, open source program, with the
Name: SID: LAB Section: Lab 6 - Part 1: Pixels and Triangle Rasterization
 Name: SID: LAB Section: Lab 6 - Part 1: Pixels and Triangle Rasterization 1. Coordinate space conversions. In OpenGL, the coordinates of a vertex in model-view space can be converted to NPC coordinates,
Name: SID: LAB Section: Lab 6 - Part 1: Pixels and Triangle Rasterization 1. Coordinate space conversions. In OpenGL, the coordinates of a vertex in model-view space can be converted to NPC coordinates,
Chapter 18. Geometric Operations
 Chapter 18 Geometric Operations To this point, the image processing operations have computed the gray value (digital count) of the output image pixel based on the gray values of one or more input pixels;
Chapter 18 Geometric Operations To this point, the image processing operations have computed the gray value (digital count) of the output image pixel based on the gray values of one or more input pixels;
ECE 661 HW_4. Bharath Kumar Comandur J R 10/02/2012. In this exercise we develop a Harris Corner Detector to extract interest points (such as
 ECE 661 HW_4 Bharath Kumar Comandur J R 10/02/2012 1 Introduction In this exercise we develop a Harris Corner Detector to extract interest points (such as corners) in a given image. We apply the algorithm
ECE 661 HW_4 Bharath Kumar Comandur J R 10/02/2012 1 Introduction In this exercise we develop a Harris Corner Detector to extract interest points (such as corners) in a given image. We apply the algorithm
Matrix Transformations The position of the corners of this triangle are described by the vectors: 0 1 ] 0 1 ] Transformation:
![Matrix Transformations The position of the corners of this triangle are described by the vectors: 0 1 ] 0 1 ] Transformation:](/thumbs/85/92538941.jpg "Matrix Transformations The position of the corners of this triangle are described by the vectors: 0 1 ] 0 1 ] Transformation:") Matrix Transformations The position of the corners of this triangle are described by the vectors: [ 2 1 ] & [4 1 ] & [3 3 ] Use each of the matrices below to transform these corners. In each case, draw
Matrix Transformations The position of the corners of this triangle are described by the vectors: [ 2 1 ] & [4 1 ] & [3 3 ] Use each of the matrices below to transform these corners. In each case, draw
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Watch the following for more announcements
 Review "plain text file" loadstrings() split() splittokens() selectinput() println(), float(), int(), can take an array argument, will return an array easy way to convert an array of Strings to an array
Review "plain text file" loadstrings() split() splittokens() selectinput() println(), float(), int(), can take an array argument, will return an array easy way to convert an array of Strings to an array
Adobe Illustrator. Always NAME your project file. It should be specific to you and the project you are working on.
 Adobe Illustrator This packet will serve as a basic introduction to Adobe Illustrator and some of the tools it has to offer. It is recommended that anyone looking to become more familiar with the program
Adobe Illustrator This packet will serve as a basic introduction to Adobe Illustrator and some of the tools it has to offer. It is recommended that anyone looking to become more familiar with the program
Answers to practice questions for Midterm 1
 Answers to practice questions for Midterm Paul Hacking /5/9 (a The RREF (reduced row echelon form of the augmented matrix is So the system of linear equations has exactly one solution given by x =, y =,
Answers to practice questions for Midterm Paul Hacking /5/9 (a The RREF (reduced row echelon form of the augmented matrix is So the system of linear equations has exactly one solution given by x =, y =,
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
CS 4620 Midterm 1. Tuesday 22 October minutes
 CS 4620 Midterm 1 Tuesday 22 October 2013 90 minutes Problem 1: Transformations (20 pts) Consider the affine transformation on R 3 defined in homogeneous coordinates by the matrix: 1 M = 1 0 0 2 0 1 0
CS 4620 Midterm 1 Tuesday 22 October 2013 90 minutes Problem 1: Transformations (20 pts) Consider the affine transformation on R 3 defined in homogeneous coordinates by the matrix: 1 M = 1 0 0 2 0 1 0
Generating Vectors Overview
 Generating Vectors Overview Vectors are mathematically defined shapes consisting of a series of points (nodes), which are connected by lines, arcs or curves (spans) to form the overall shape. Vectors can
Generating Vectors Overview Vectors are mathematically defined shapes consisting of a series of points (nodes), which are connected by lines, arcs or curves (spans) to form the overall shape. Vectors can
Computer Graphics (4731) Lecture 4: 2D Graphics Systems (Drawing Polylines, tiling, & Aspect Ratio)
 Lecture 4: 2D Graphics Systems (Drawing Polylines, tiling, & Aspect Ratio)") Computer Graphics (4731) Lecture 4: 2D Graphics Systems (Drawing Polylines, tiling, & Aspect Ratio) Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Screen Coordinate System
Computer Graphics (4731) Lecture 4: 2D Graphics Systems (Drawing Polylines, tiling, & Aspect Ratio) Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Screen Coordinate System
TEXT DETECTION AND MARKER BASED FINGER TRACKING IN BUILDING A LANGUAGE ASSISTANT FOR WEARABLE GLASSES
 International Conference on Internet Studies, April2-4, 2018, Katamatsu, Japan TEXT DETECTION AND MARKER BASED FINGER TRACKING IN BUILDING A LANGUAGE ASSISTANT FOR WEARABLE GLASSES Ting Kwok Chan, Ying
International Conference on Internet Studies, April2-4, 2018, Katamatsu, Japan TEXT DETECTION AND MARKER BASED FINGER TRACKING IN BUILDING A LANGUAGE ASSISTANT FOR WEARABLE GLASSES Ting Kwok Chan, Ying
CSCI-1200 Data Structures Fall 2017 Lecture 12 Advanced Recursion
 CSCI-1200 Data Structures Fall 2017 Lecture 12 Advanced Recursion Review from Lecture 11 & Lab 6 Limitations of singly-linked lists Doubly-linked lists: Structure Insert Remove Our own version of the STL
CSCI-1200 Data Structures Fall 2017 Lecture 12 Advanced Recursion Review from Lecture 11 & Lab 6 Limitations of singly-linked lists Doubly-linked lists: Structure Insert Remove Our own version of the STL
Implementation of Hand Detection based Techniques for Human Computer Interaction
 Implementation of Hand Detection based Techniques for Human Computer Interaction Amiraj Dhawan, Vipul Honrao Dept of Computer Engineering Fr. C. Rodrigues Institute of Technology, Vashi Navi Mumbai, India
Implementation of Hand Detection based Techniques for Human Computer Interaction Amiraj Dhawan, Vipul Honrao Dept of Computer Engineering Fr. C. Rodrigues Institute of Technology, Vashi Navi Mumbai, India
WORD Creating Objects: Tables, Charts and More
 WORD 2007 Creating Objects: Tables, Charts and More Microsoft Office 2007 TABLE OF CONTENTS TABLES... 1 TABLE LAYOUT... 1 TABLE DESIGN... 2 CHARTS... 4 PICTURES AND DRAWINGS... 8 USING DRAWINGS... 8 Drawing
WORD 2007 Creating Objects: Tables, Charts and More Microsoft Office 2007 TABLE OF CONTENTS TABLES... 1 TABLE LAYOUT... 1 TABLE DESIGN... 2 CHARTS... 4 PICTURES AND DRAWINGS... 8 USING DRAWINGS... 8 Drawing
From Vertices To Fragments-1
 From Vertices To Fragments-1 1 Objectives Clipping Line-segment clipping polygon clipping 2 Overview At end of the geometric pipeline, vertices have been assembled into primitives Must clip out primitives
From Vertices To Fragments-1 1 Objectives Clipping Line-segment clipping polygon clipping 2 Overview At end of the geometric pipeline, vertices have been assembled into primitives Must clip out primitives
InDesign Tools Overview
 InDesign Tools Overview REFERENCE If your palettes aren t visible you can activate them by selecting: Window > Tools Transform Color Tool Box A Use the selection tool to select, move, and resize objects.
InDesign Tools Overview REFERENCE If your palettes aren t visible you can activate them by selecting: Window > Tools Transform Color Tool Box A Use the selection tool to select, move, and resize objects.
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CGT520 Transformations
 CGT520 Transformations Bedrich Benes, Ph.D. Purdue University Department of Computer Graphics GLM A concise library for transforms and OpenGL mathematics All overloaded, predefined, optimized glm (OpenGL
CGT520 Transformations Bedrich Benes, Ph.D. Purdue University Department of Computer Graphics GLM A concise library for transforms and OpenGL mathematics All overloaded, predefined, optimized glm (OpenGL
TDA362/DIT223 Computer Graphics EXAM (Same exam for both CTH- and GU students)
") TDA362/DIT223 Computer Graphics EXAM (Same exam for both CTH- and GU students) Saturday, January 13 th, 2018, 08:30-12:30 Examiner Ulf Assarsson, tel. 031-772 1775 Permitted Technical Aids None, except
TDA362/DIT223 Computer Graphics EXAM (Same exam for both CTH- and GU students) Saturday, January 13 th, 2018, 08:30-12:30 Examiner Ulf Assarsson, tel. 031-772 1775 Permitted Technical Aids None, except
Assignment #2: 2D Vector Field Topological Analysis: Compute Differential Topology and Geometric-based Morse Decomposition
 Assignment #2: 2D Vector Field Topological Analysis: Compute Differential Topology and Geometric-based Morse Decomposition Goals: Due Mar 8 th, before midnight By completing the first assignment, you should
Assignment #2: 2D Vector Field Topological Analysis: Compute Differential Topology and Geometric-based Morse Decomposition Goals: Due Mar 8 th, before midnight By completing the first assignment, you should
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Multimedia Retrieval Exercise Course 2 Basic of Image Processing by OpenCV
 Multimedia Retrieval Exercise Course 2 Basic of Image Processing by OpenCV Kimiaki Shirahama, D.E. Research Group for Pattern Recognition Institute for Vision and Graphics University of Siegen, Germany
Multimedia Retrieval Exercise Course 2 Basic of Image Processing by OpenCV Kimiaki Shirahama, D.E. Research Group for Pattern Recognition Institute for Vision and Graphics University of Siegen, Germany
Countdown to your final Maths exam Part 13 (2018)
") Countdown to your final Maths exam Part 13 (2018) Marks Actual Q1. Translations (Clip 67) 2 Q2. Reflections & enlargements (Clips 64 & 63) 5 Q3. Rotations (Clip 65) 3 Q4. Rotations (Clip 65) 2 Q5. Rotations
Countdown to your final Maths exam Part 13 (2018) Marks Actual Q1. Translations (Clip 67) 2 Q2. Reflections & enlargements (Clips 64 & 63) 5 Q3. Rotations (Clip 65) 3 Q4. Rotations (Clip 65) 2 Q5. Rotations
1 Background and Introduction 2. 2 Assessment 2
 Luleå University of Technology Matthew Thurley Last revision: October 27, 2011 Industrial Image Analysis E0005E Product Development Phase 4 Binary Morphological Image Processing Contents 1 Background and
Luleå University of Technology Matthew Thurley Last revision: October 27, 2011 Industrial Image Analysis E0005E Product Development Phase 4 Binary Morphological Image Processing Contents 1 Background and
ASIC-200 Version 5.0. integrated industrial control software. HMI Guide
 ASIC-200 Version 5.0 integrated industrial control software HMI Guide Revision Description Date C Name change, correct where applicable with document 4/07 HMI Guide: 139168(C) Published by: Pro-face 750
ASIC-200 Version 5.0 integrated industrial control software HMI Guide Revision Description Date C Name change, correct where applicable with document 4/07 HMI Guide: 139168(C) Published by: Pro-face 750
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Target Marker: A Visual Marker for Long Distances and Detection in Realtime on Mobile Devices
 Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 015) Barcelona, Spain, July 13-14, 015 Paper No. 339 Target Marker: A Visual Marker for Long Distances
Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 015) Barcelona, Spain, July 13-14, 015 Paper No. 339 Target Marker: A Visual Marker for Long Distances
CS-211 Fall 2017 Test 1 Version A Oct. 2, Name:
 CS-211 Fall 2017 Test 1 Version A Oct. 2, 2017 True/False Questions... Name: 1. (10 points) For the following, Check T if the statement is true, the F if the statement is false. (a) T F : If I code a C
CS-211 Fall 2017 Test 1 Version A Oct. 2, 2017 True/False Questions... Name: 1. (10 points) For the following, Check T if the statement is true, the F if the statement is false. (a) T F : If I code a C
Notes on Assignment. Notes on Assignment. Notes on Assignment. Notes on Assignment
 Notes on Assignment Notes on Assignment Objects on screen - made of primitives Primitives are points, lines, polygons - watch vertex ordering The main object you need is a box When the MODELVIEW matrix
Notes on Assignment Notes on Assignment Objects on screen - made of primitives Primitives are points, lines, polygons - watch vertex ordering The main object you need is a box When the MODELVIEW matrix
SignGO Pro // SignGO Lite Features Listing
 SignGO Pro // SignGO Lite Features Listing Features Design Text Entry SignGO Lite SignGO Pro Artistic Text Text On Arc Text On Path Frame Text AutoMerge Script Drawing Shape drawing Freehand drawing Logos
SignGO Pro // SignGO Lite Features Listing Features Design Text Entry SignGO Lite SignGO Pro Artistic Text Text On Arc Text On Path Frame Text AutoMerge Script Drawing Shape drawing Freehand drawing Logos
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Lesson 1. Unit 2 Practice Problems. Problem 2. Problem 1. Solution 1, 4, 5. Solution. Problem 3
 Unit 2 Practice Problems Lesson 1 Problem 1 Rectangle measures 12 cm by 3 cm. Rectangle is a scaled copy of Rectangle. Select all of the measurement pairs that could be the dimensions of Rectangle. 1.
Unit 2 Practice Problems Lesson 1 Problem 1 Rectangle measures 12 cm by 3 cm. Rectangle is a scaled copy of Rectangle. Select all of the measurement pairs that could be the dimensions of Rectangle. 1.
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
C Language Summary (Continued)
") Chris J Michael cmicha1@lsu.edu 11 September 2008 C Language Summary (Continued) Heavily Influenced by the GNU C Reference Manual: http://www.gnu.org/software/gnu-c-manual/ Q/A -Somebody brought up a nice
Chris J Michael cmicha1@lsu.edu 11 September 2008 C Language Summary (Continued) Heavily Influenced by the GNU C Reference Manual: http://www.gnu.org/software/gnu-c-manual/ Q/A -Somebody brought up a nice
Chapter 2 Rigid Transformations Geometry. For 1-10, determine if the following statements are always, sometimes, or never true.
 Chapter 2 Rigid Transformations Geometry Name For 1-10, determine if the following statements are always, sometimes, or never true. 1. Right triangles have line symmetry. 2. Isosceles triangles have line
Chapter 2 Rigid Transformations Geometry Name For 1-10, determine if the following statements are always, sometimes, or never true. 1. Right triangles have line symmetry. 2. Isosceles triangles have line
Chapter 5 Managing Graphic Objects
 Impress Guide Chapter 5 Managing Graphic Objects Moving, rotating, distorting, and positioning objects; animations; Fontwork This PDF is designed to be read onscreen, two pages at a time. If you want to
Impress Guide Chapter 5 Managing Graphic Objects Moving, rotating, distorting, and positioning objects; animations; Fontwork This PDF is designed to be read onscreen, two pages at a time. If you want to