Robotics Adventure Book Scouter manual STEM 1
|
|
|
- Bruce Ray
- 6 years ago
- Views:
Transcription



1 Robotics Robotics Adventure Book Scouter Manual Robotics Adventure Book Scouter manual STEM 1
2 A word with our Scouters: This activity is designed around a space exploration theme. Your Scouts will learn to program the Robot to perform different functions that are useful for exploration in a remote area. In this booklet, you can find sample programs for activities that your Scouts should train the robot for. These are for your preparation so that you can better help your Scouts when they are trying to design their own programs. When working on the activities, ask the Scouts to write the steps that the robot should take (the algorithm) before they begin working with the programming software. This will allow them to have a clear structure for the program before they begin dealing with the details of commands. Here is the scenario the Scouts are working with: Imagine It s 2028 and it s been 15 years since you first had a chance to explore science, engineering, technology and mathematics in Scouts. Now you re a young engineer and you ve got a chance to work on a brand new space probe. In the last 15 years, remarkable advances have been made by scientists exploring the fundamentals of physics, and we ve cracked the problem of near light speed travel. For 20 years we ve been discovering planets circling other stars and star systems (Exoplanets). Now, we re set to go and explore several promising candidates and look for molecular signs of life. Here s the catch: the robotic probe that you will design will take nearly 20 years to reach these planets, and signals to and from the robots will take nearly 10 years each way. The robots will have to explore their new planets on their own, with no direction from Earth. 1 Robotics Adventure Book Scouter manual STEM
3 Your Mission You will program a prototype robot to search in a pattern, sampling to find water and hydrocarbons. There are no GPS satellites orbiting these far-off worlds. Their magnetic fields won t be anything like that of Earth, so even a compass is of no use. All you ll have to go on for position is how much the robot s wheels have turned. As a young engineer, what are the first things that you d want to know? Robotics Adventure Book Scouter manual STEM 2
.")


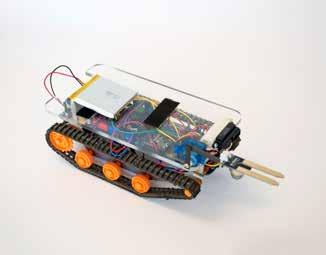
4 Getting To Know Your Robot The hardware used for the STEM Robots consists of an Arduino base platform with tracks, drive motors, a microprocessor board, LEDs for signaling, and digital and analog input and output ports ( pins ). The digital and analog input and output ports permit additional instrumentation to be added to the basic unit functionality. The additional instrumentation, in the case of the STEM Robots, consists of: A B Proximity detector: an infrared detector Distance travelled detectors: an encoder on each set of drive tracks C & D Signs of life detectors: a hydrocarbon detector and a moisture detector E Detector operator : a servo motor used to control the position of the moisture detector B E A C D L LED= D13 Digital I/O Prototyping Area LED Jumper 5V Gnd 3 Robotics Adventure Book Scouter manual STEM





5 How to Connect Parts of the Robot The robot connects to the computer with the USB cable. The battery is connected through the plug next to the USB port on the robot. The moisture sensor is connected through the plug with blue, red and black wiring. It is then screwed to the moisture arm. Robotics Adventure Book Scouter manual STEM 4
6 Overview of Robot Electronic Controls Inputs Inputs are used to obtain information about the world. In this robot, inputs include analog values from the wheel encoders and the various instrumentation sensors (moisture, hydrocarbon, and proximity): Pin 0 right track optical encoder (to measure distance) Pin 1 left track optical encoder (to measure distance) Pin 2 infrared sensor (to detect proximity to an object) Pin 3 moisture sensor (dry, moist, very wet) Pin 4 hydrocarbon sensor (to detect evidence of the molecules of life) The analog inputs give a value between 0 and 1024 that represents a voltage between 0V and 5V. Sensors provide voltage outputs that mean different things for different sensors; you have to read the Data Sheet to know exactly what these are. Outputs Outputs are used to send information to the real world or peripheral devices. On this robot, outputs include: Pin 5 & 6 - Analog values (in the form of DC voltages) to the track drive motors to control their speed Pin 7 & 8 - Digital values ( high / low ) to control the motor drive directions Pin 11 - Analog value (also DC voltage) for positioning of the Servo Pin 12&13 Digital values ( high / low ) to control the LEDs Summary of Input/ Outputs Inputs Outputs Right Track Encoder Left Track Motor Speed Left Track Encoder Right Track Motor Speed Infrared Sensor (Proximity) Left Track Motor Direction Moisture Sensor Right Track Motor Direction Hydrocarbon Sensor Servo Motor Control Blue Indicating LEDs Green Indicating LEDs 5 Robotics Adventure Book Scouter manual STEM
7 Data Sheet: Outputs Pin Function Command Parameters 0-4 (don t use) 5 Left motor speed Set Analog Pin# 5 Stop=0 to fast=255* 6 Right motor speed Set Analog Pin #6 Stop=0 to fast=255* 7 Left motor direction Set Digital Pin #7 Low= Forward High=Backward 8 Right motor direction Set Digital Pin #8 Low= Forward High=Backward 9-10 (don t use) 11 Moisture sensor arm Servo (pin# 11, angle) Angle in degrees 12 Blue LEDs Set Digital Pin #12 Low= off High=On 13 Green LEDs Set Digital Pin #13 Low= off High=On Data Sheet: Inputs Pin Function Command Parameters 0 Right track optical encoder Set Number Variable (Variable, pin # 0)* 1 Left track optical encoder Set Number Variable (Variable, pin # 1) 2 Infrared Sensor Set Number Variable (Variable, pin # 2) 3 Moisture Sensor Set Number Variable (Variable, pin # 3) 4 Hydrocarbon Sensor Set Number Variable (Variable, pin # 4) 5-7 (don t use) 3 edges = 2cm An edge is a change from below 600 to above edges = 2cm An edge is a change from below 600 to above 600 Volts=Sensor Value *5/1024 Distance in cm=27*volts^(-1.1) = dry soil = humid soil = in water <150 = none = maybe >450 = yes!!! Robotics Adventure Book Scouter manual STEM 6
8 Installing the Programming Software (Arduino) and the Robot on the Computer The robot kit comes with a laptop that has all the programs installed, but you can bring in more computers to your meeting so that more Scouts can work on their programming simultaneously. To do this, you need to install the programming software and the robot s driver on the additional computers. Install the Arduino compiler: 1. Open your browser to 2. Click the Windows link under Download Arduino and save the zip file. 3. When the download finishes, unzip the downloaded file. Make sure to preserve the folder structure. Double-click the folder to open it. There should be a few files and sub-folders inside. Install the graphical programming environment ArduBlocks : 4. Open your browser to and follow the instructions there to: a. Download the ardublock-all.jar file. b. Put it in the Documents\Arduino\tools\ArduBlockTool\tool\ or My Documents\Arduino\tools\ ArduBlockTool\tool\ (whichever matches your operating system) folder under your home directory. At this point you can open the programming environment even if you don t have the robot. If you want to do that, skip to step 12. You can always come back to step 5 when you do have the robot. Connect the Robot The robots use a version of the Arduino Uno board. These boards automatically draw power from either the USB connection to the computer or an external power supply. 5. Connect the robot to your computer using the USB cable. The green power LED (labelled PWR) should go on. 7 Robotics Adventure Book Scouter manual STEM
9 Install the drivers for the Arduino Uno (Robot) : (See also: step-by-step screenshots for installing the Uno: ) 6. Plug in the robot and wait for Windows to begin its driver installation process. After a few moments, the process will fail, despite its best efforts. 7. Click on the Start Menu, and open up the Control Panel. While in the Control Panel, navigate to System and Security. Next, click on System. Once the System window is up, open the Device Manager. 8. Look under Ports (COM & LPT). You should see an open port named Arduino UNO (COMxx) 9. Right click on the Arduino UNO (COmxx) port and choose the Update Driver Software option. 10. Next, choose the Browse my computer for Driver software option. 11. Finally, navigate to and select the Uno s driver file, named ArduinoUNO.inf, located in the Drivers folder of the Arduino Software download (not the FTDI USB Drivers sub-directory).windows will finish up the driver installation from there. Opening the programming environment: 12. Double-click the Arduino application. 13. Under the Tools menu, select ArduBlock 14. From there you can start building a program by dragging code blocks from the menu on the left side of the ArduBlock window. Robotics Adventure Book Scouter manual STEM 8
 Select Ardublock from Tools menu (Ardublock window will open) Create new program by using the Ardublock tools Save program on")
10 Programming the Robot- Arduino To program the robot, you can use the Arduino Software and its graphical tool called ArduBlock. Steps to create and save a program: Run Arduino (sketch window will open) Select Ardublock from Tools menu (Ardublock window will open) Create new program by using the Ardublock tools Save program on the laptop To load a saved program, select Load and browse for the folder and program name Steps to compile and upload a program to your robot: Make sure robot power switch is turned Off Connect laptop to robot using USB cable Select Upload - System will convert Ardublock program to Arduino program and compile it - System will report any errors - If no errors found, system will load program to robot, overwriting the previous program and display the message: Done uploading To run the program, turn the robot power switch On. If the program commands the robot to drive, disconnect the robot from the laptop. 9 Robotics Adventure Book Scouter manual STEM
11 ArduBlocks Programming Tools Control: lets you execute instructions based on certain conditions Loop keep running the set of instructions (every program should be written inside a loop). If run a set of instructions if the test condition is true. If else run one set of instructions if the test condition is true, and another if it is false. While run a set of instructions as long as the test condition is true. Pin: lets you name and describe the pins on the Arduino board to the program Set digital pin lets you assign a value to a digital pin Set analog pin sets a value for a PWM (Pulse Width Modulates) digital pin Servo lets you specify which pin controls a servo motor Number/Constants: used to set up variables and give them initial values Set digital var create a variable that takes only two values Set number var create a numeric variable that can take many values Constants a number, HIGH, LOW, TRUE, FALSE Operators: where you find logical and mathematical operations Logical operators and, or, not Mathematical operators - +, -, x,, %, min, max, and a bunch more Utilities: common functions you can use Delay stops the program for # of milliseconds or microseconds Robotics Adventure Book Scouter manual STEM 10
12 Activities to Complete the Mission Like the engineers who ve sent people to space and rovers to other planets before you, you ll take a step by step approach, proving each new capability and then adding to it until you have everything you need. What steps do you think you should take to complete your robot programming mission? (The following pages have a list of suggested steps but you can make up your own plan and design your own activities). 11 Robotics Adventure Book Scouter manual STEM

13 Activity 1 Blink Blink Objective Blink the 6 blue LED lights twice in a row. Blink the 6 blue LED lights 4 times in a row. How does this get used? Your prototype does not include the high gain antenna & transmitter for sending data back to Earth, so we will simulate the short/restricted messages using the LEDs. What you need to know Set Digital Pin block Delay block Which pins? Extend / Challenge Can you make it blink a pattern? Decide on a different # of blinks for different sensors & values. Robotics Adventure Book Scouter manual STEM 12

14 Activity 2 Learning to Drive Objective Drive forward for 3 seconds then back. How does this get used? Your prototype will need to explore an area, moving forward and backwards. What you need to know Which pins control the direction of the motors? Extend / Challenge Speed up and slow down. Which pins control the speed of the motors? 13 Robotics Adventure Book Scouter manual STEM

15 Activity 3 Learning to Turn Objective Turn 90 degrees (one side driving) Rotate 90 degrees (one forward, one back) What you need to know Pins for track direction Pins for track motor speed How long does it take to rotate 90 degrees as opposed to some other angle? How does this get used? Your prototype will need to turn in a controlled manner to move from one search area to another Extend / Challenge Drive in a square. Was it easy to always get a square? Robotics Adventure Book Scouter manual STEM 14
.")
16 Activity 4 How Far Did We Go? Objective While driving forward, read the optical encoder. What you need to know How does the optical encoder work? Reading the analog input How does this get used? Be able to drive a known distance and turn accurately to drive a search pattern (stripes or expanding square). Extend / Challenge Use the optical encoders to make a more accurate turn or rotate, rather than just using time. 15 Robotics Adventure Book Scouter manual STEM
17 Putting Together the Drive Subroutines Rather than putting all the commands to make up driving, turning, and keeping track of distance into your main loop, you have created a block of subroutines to do those things that you can use over and over. In fact, you have even gone further and made them so that the robot will continue to drive while the program does other things like read a distance sensor or the sensors for moisture and hydrocarbons. The new operations (in subroutines) you have are: Drive (direction, distance) Turn (direction, angle) Rotate (direction, angle) Stop How Far? Returns the distance since the start of the last Drive call Done? Returns true if the last Drive, Turn or Rotate has completed Robotics Adventure Book Scouter manual STEM 16

18 Activity 5 Sensing Proximity Objective To be able to detect the presence of an object ahead To stop before running into the object How does this get used? You can expect that there will be unknown objects on the planet; your prototype needs to detect and go around them rather than crash and get damaged. What you need to know Pin for infrared sensor How the infrared sensor works Extend / Challenge Can you drive around an object in the field and pick up the same search pattern? How to convert a value to a distance 17 Robotics Adventure Book Scouter manual STEM

19 Activity 6 Sensing Hydrocarbon Objective Test for the presence of hydrocarbons in a particular location How does this get used? At regular intervals during its exploration, your prototype should test for signs of life Blink blue LED lights according to test results What you need to know Pin for hydrocarbon sensor How does the sensor work? Range of values that would imply some form of hydrocarbon is present Extend / Challenge Determine a message sequence that indicates the strength of hydrocarbon presence Over what size of area is it present? Robotics Adventure Book Scouter manual STEM 18

20 Activity 7 Sensing Moisture Objective Lower the arm, and test for the presence of moisture in a particular location Blink blue LED lights based on the test results What you need to know Pin for moisture sensor How to raise and lower the arm to which moisture sensor is attached How does this get used Moisture is a necessity for life. Your prototype needs to sample the ground at regular intervals for the presence of moisture. Extend / Challenge Chart out an area which contains sufficient moisture to sustain life Sensor values which indicate dry, moist, very wet 19 Robotics Adventure Book Scouter manual STEM
21 Get out there and explore! Have your robot conduct a search of the test area. Find the presence of hydrocarbons and moisture and see your robot signal what it finds all by itself, using your programmed instructions. Robotics Adventure Book Scouter manual STEM 20
22 Challenge Activity What did you find? Drive to multiple samples. Requires you to back up after taking a sample, then drive around an obstacle and resume your original pattern. 21 Robotics Adventure Book Scouter manual STEM
TA0139 USER MANUAL ARDUINO 2 WHEEL DRIVE WIRELESS BLUETOOTH ROBOT KIT
 TA0139 USER MANUAL ARDUINO 2 WHEEL DRIVE WIRELESS BLUETOOTH ROBOT KIT I Contents Overview TA0139... 1 Getting started: Arduino 2 Wheel Drive Wireless Bluetooth Robot Kit using Arduino UNO... 1 2.1. What
TA0139 USER MANUAL ARDUINO 2 WHEEL DRIVE WIRELESS BLUETOOTH ROBOT KIT I Contents Overview TA0139... 1 Getting started: Arduino 2 Wheel Drive Wireless Bluetooth Robot Kit using Arduino UNO... 1 2.1. What
Lab 2.2 Ohm s Law and Introduction to Arduinos
 Lab 2.2 Ohm s Law and Introduction to Arduinos Objectives: Get experience using an Arduino Learn to use a multimeter to measure Potential units of volts (V) Current units of amps (A) Resistance units of
Lab 2.2 Ohm s Law and Introduction to Arduinos Objectives: Get experience using an Arduino Learn to use a multimeter to measure Potential units of volts (V) Current units of amps (A) Resistance units of
ROBOTLINKING THE POWER SUPPLY LEARNING KIT TUTORIAL
 ROBOTLINKING THE POWER SUPPLY LEARNING KIT TUTORIAL 1 Preface About RobotLinking RobotLinking is a technology company focused on 3D Printer, Raspberry Pi and Arduino open source community development.
ROBOTLINKING THE POWER SUPPLY LEARNING KIT TUTORIAL 1 Preface About RobotLinking RobotLinking is a technology company focused on 3D Printer, Raspberry Pi and Arduino open source community development.
Code&Drive First steps
 Code&Drive First steps Now that you have built the Code & Drive, you can set the Build&Code 4in1 board using any of the following software: Arduino IDE, Bitbloq or a visual programming software by blocks
Code&Drive First steps Now that you have built the Code & Drive, you can set the Build&Code 4in1 board using any of the following software: Arduino IDE, Bitbloq or a visual programming software by blocks
Discover Robotics & Programming CURRICULUM SAMPLE
 OOUTLINE 5 POINTS FOR EDP Yellow Level Overview Robotics incorporates mechanical engineering, electrical engineering and computer science - all of which deal with the design, construction, operation and
OOUTLINE 5 POINTS FOR EDP Yellow Level Overview Robotics incorporates mechanical engineering, electrical engineering and computer science - all of which deal with the design, construction, operation and
USER MANUAL ARDUINO I/O EXPANSION SHIELD
 USER MANUAL ARDUINO I/O EXPANSION SHIELD Description: Sometimes Arduino Uno users run short of pins because there s a lot of projects that requires more than 20 signal pins. The only option they are left
USER MANUAL ARDUINO I/O EXPANSION SHIELD Description: Sometimes Arduino Uno users run short of pins because there s a lot of projects that requires more than 20 signal pins. The only option they are left
RedBoard Hookup Guide
 Page 1 of 11 RedBoard Hookup Guide CONTRIBUTORS: JIMB0 Introduction The Redboard is an Arduino-compatible development platform that enables quick-and-easy project prototyping. It can interact with real-world
Page 1 of 11 RedBoard Hookup Guide CONTRIBUTORS: JIMB0 Introduction The Redboard is an Arduino-compatible development platform that enables quick-and-easy project prototyping. It can interact with real-world
Prototyping & Engineering Electronics Kits Basic Kit Guide
 Prototyping & Engineering Electronics Kits Basic Kit Guide odysseyboard.com Please refer to www.odysseyboard.com for a PDF updated version of this guide. Guide version 1.0, February, 2018. Copyright Odyssey
Prototyping & Engineering Electronics Kits Basic Kit Guide odysseyboard.com Please refer to www.odysseyboard.com for a PDF updated version of this guide. Guide version 1.0, February, 2018. Copyright Odyssey
Arduino Smart Robot Car Kit User Guide
 User Guide V1.0 04.2017 UCTRONIC Table of Contents 1. Introduction...3 2. Assembly...4 2.1 Arduino Uno R3...4 2.2 HC-SR04 Ultrasonic Sensor Module with Bracket / Holder...5 2.3 L293D Motor Drive Expansion
User Guide V1.0 04.2017 UCTRONIC Table of Contents 1. Introduction...3 2. Assembly...4 2.1 Arduino Uno R3...4 2.2 HC-SR04 Ultrasonic Sensor Module with Bracket / Holder...5 2.3 L293D Motor Drive Expansion
keyestudio Keyestudio MEGA 2560 R3 Board
 Keyestudio MEGA 2560 R3 Board Introduction: Keyestudio Mega 2560 R3 is a microcontroller board based on the ATMEGA2560-16AU, fully compatible with ARDUINO MEGA 2560 REV3. It has 54 digital input/output
Keyestudio MEGA 2560 R3 Board Introduction: Keyestudio Mega 2560 R3 is a microcontroller board based on the ATMEGA2560-16AU, fully compatible with ARDUINO MEGA 2560 REV3. It has 54 digital input/output
Digital Pins and Constants
 Lesson Lesson : Digital Pins and Constants Digital Pins and Constants The Big Idea: This lesson is the first step toward learning to connect the Arduino to its surrounding world. You will connect lights
Lesson Lesson : Digital Pins and Constants Digital Pins and Constants The Big Idea: This lesson is the first step toward learning to connect the Arduino to its surrounding world. You will connect lights
PDF of this portion of workshop notes:
 PDF of this portion of workshop notes: http://goo.gl/jfpeym Teaching Engineering Design with Student-Owned Digital and Analog Lab Equipment John B. Schneider Washington State University June 15, 2015 Overview
PDF of this portion of workshop notes: http://goo.gl/jfpeym Teaching Engineering Design with Student-Owned Digital and Analog Lab Equipment John B. Schneider Washington State University June 15, 2015 Overview
C Language Reference for ActivityBot. Driving the robot a specific distance or a specific amount of turn
 Code for Driving ActivityBot C Language Reference for ActivityBot Jeffrey La Favre - November 4, 2015 There are two types of functions for driving the robot. The first kind specifies a specific distance
Code for Driving ActivityBot C Language Reference for ActivityBot Jeffrey La Favre - November 4, 2015 There are two types of functions for driving the robot. The first kind specifies a specific distance
Experiment 4.A. Speed and Position Control. ECEN 2270 Electronics Design Laboratory 1
 .A Speed and Position Control Electronics Design Laboratory 1 Procedures 4.A.0 4.A.1 4.A.2 4.A.3 4.A.4 Turn in your Pre-Lab before doing anything else Speed controller for second wheel Test Arduino Connect
.A Speed and Position Control Electronics Design Laboratory 1 Procedures 4.A.0 4.A.1 4.A.2 4.A.3 4.A.4 Turn in your Pre-Lab before doing anything else Speed controller for second wheel Test Arduino Connect
Rover 5. Explorer kit
 Rover 5 Explorer kit The explorer kit provides the perfect interface between your Rover 5 chassis and your micro-controller with all the hardware you need so you can start programming right away. PCB Features:
Rover 5 Explorer kit The explorer kit provides the perfect interface between your Rover 5 chassis and your micro-controller with all the hardware you need so you can start programming right away. PCB Features:
Getting Started Manual for CODIBOT
 a Getting Started Manual for CODIBOT Step 1: Open the Box. Step 2: Inside the box you will find the Pre-Assembled body of CODIBOT along with the Add-On packs, Connecting Wires, Nuts & Bolts. Take out the
a Getting Started Manual for CODIBOT Step 1: Open the Box. Step 2: Inside the box you will find the Pre-Assembled body of CODIBOT along with the Add-On packs, Connecting Wires, Nuts & Bolts. Take out the
RoastLogger Arduino/TC4 driver installation for Windows 9/10/13 By John Hannon (JackH) at Homeroasters.org
 at Homeroasters.org") This procedure was written for the Arduino Uno board with the TC4 shield. Please check the Arduino site for software if you are using a different model. I have not tested it, but this procedure should
This procedure was written for the Arduino Uno board with the TC4 shield. Please check the Arduino site for software if you are using a different model. I have not tested it, but this procedure should
This is the Arduino Uno: This is the Arduino motor shield: Digital pins (0-13) Ground Rail
 Ground Rail") Reacting to Sensors In this tutorial we will be going over how to program the Arduino to react to sensors. By the end of this workshop you will have an understanding of how to use sensors with the Arduino
Reacting to Sensors In this tutorial we will be going over how to program the Arduino to react to sensors. By the end of this workshop you will have an understanding of how to use sensors with the Arduino
Lab 01 Arduino 程式設計實驗. Essential Arduino Programming and Digital Signal Process
 Lab 01 Arduino 程式設計實驗 Essential Arduino Programming and Digital Signal Process Arduino Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. It's
Lab 01 Arduino 程式設計實驗 Essential Arduino Programming and Digital Signal Process Arduino Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. It's
TA0013 ARDUINO RFID UNO STARTER KIT
 TA0013 ARDUINO RFID UNO STARTER KIT Overview TA0013 This Arduino Uno ultimate project kit includes comprehensive range of components to get you started in building and experimenting with Arduino projects.
TA0013 ARDUINO RFID UNO STARTER KIT Overview TA0013 This Arduino Uno ultimate project kit includes comprehensive range of components to get you started in building and experimenting with Arduino projects.
EEL 5666C FALL Robot Name: DogBot. Author: Valerie Serluco. Date: December 08, Instructor(s): Dr. Arroyo. Dr. Schwartz. TA(s): Andrew Gray
: Dr. Arroyo. Dr. Schwartz. TA(s): Andrew Gray") EEL 5666C FALL 2015 Robot Name: DogBot Author: Valerie Serluco Date: December 08, 2015 Instructor(s): Dr. Arroyo Dr. Schwartz TA(s): Andrew Gray Jacob Easterling INTRODUCTION ABSTRACT One of the fun things
EEL 5666C FALL 2015 Robot Name: DogBot Author: Valerie Serluco Date: December 08, 2015 Instructor(s): Dr. Arroyo Dr. Schwartz TA(s): Andrew Gray Jacob Easterling INTRODUCTION ABSTRACT One of the fun things
Arduino 101 AN INTRODUCTION TO ARDUINO BY WOMEN IN ENGINEERING FT T I NA A ND AW E S O ME ME NTO R S
 Arduino 101 AN INTRODUCTION TO ARDUINO BY WOMEN IN ENGINEERING FT T I NA A ND AW E S O ME ME NTO R S Overview Motivation Circuit Design and Arduino Architecture Projects Blink the LED Switch Night Lamp
Arduino 101 AN INTRODUCTION TO ARDUINO BY WOMEN IN ENGINEERING FT T I NA A ND AW E S O ME ME NTO R S Overview Motivation Circuit Design and Arduino Architecture Projects Blink the LED Switch Night Lamp
Ardusat Space Kits in the Classroom
 Ardusat Space Kits in the Classroom Resources Why Arduino platform? Real-world STEM application Space Kit contents Let s get started!! Activity1BasicBlink & Activity2MorseCode Activity3LuminTSL2561 Activity4A_TMP102
Ardusat Space Kits in the Classroom Resources Why Arduino platform? Real-world STEM application Space Kit contents Let s get started!! Activity1BasicBlink & Activity2MorseCode Activity3LuminTSL2561 Activity4A_TMP102
Elektor Uno R4 Installation & Test
 Elektor Uno R4 Installation & Test Prerequisites Elektor Uno R4 USB-A to micro-b cable Computer with Windows (XP or later), Linux or OSX (10.7 or later) Arduino IDE 1.6.7 or higher (not 1.6.8) We highly
Elektor Uno R4 Installation & Test Prerequisites Elektor Uno R4 USB-A to micro-b cable Computer with Windows (XP or later), Linux or OSX (10.7 or later) Arduino IDE 1.6.7 or higher (not 1.6.8) We highly
HUB-ee BMD-S Arduino Proto Shield V1.0
 HUB-ee BMD-S Arduino Proto Shield V1.0 User guide and assembly instructions Document Version 1.0 Introduction 2 Schematic 3 Quick user guide 4 Assembly 5 1) DIP Switches 5 2) Micro-MaTch Connector Headers
HUB-ee BMD-S Arduino Proto Shield V1.0 User guide and assembly instructions Document Version 1.0 Introduction 2 Schematic 3 Quick user guide 4 Assembly 5 1) DIP Switches 5 2) Micro-MaTch Connector Headers
Phantom 2 Reference Guide
 Phantom 2 Reference Guide Contents Section 1: Operation and Preparing for Flight. 2 Transmitter introduction 2 Controlling the Drone 2 Turning on the Transmitter 3 Range Extender 3 Basic Drone Parts 4
Phantom 2 Reference Guide Contents Section 1: Operation and Preparing for Flight. 2 Transmitter introduction 2 Controlling the Drone 2 Turning on the Transmitter 3 Range Extender 3 Basic Drone Parts 4
AlphaBot2 robot building kit for Arduino
 AlphaBot2 robot building kit for Arduino SKU 110060864 Description This AlphaBot2 robot kit is designed to use with an Arduino compatible board UNO PLUS. It features rich common robot functions including
AlphaBot2 robot building kit for Arduino SKU 110060864 Description This AlphaBot2 robot kit is designed to use with an Arduino compatible board UNO PLUS. It features rich common robot functions including
1. Introduction Packing list Parts Introduction Uno R3 Board for Arduino Specifications... 6
 Table of Contents Smart Bluetooth Robot Car Kit for Arduino 1. Introduction...4 1.1 Packing list...5 2. Parts Introduction...6 2.1 Uno R3 Board for Arduino...6 2.1.1 Specifications... 6 2.2 HC-SR04 Ultrasonic
Table of Contents Smart Bluetooth Robot Car Kit for Arduino 1. Introduction...4 1.1 Packing list...5 2. Parts Introduction...6 2.1 Uno R3 Board for Arduino...6 2.1.1 Specifications... 6 2.2 HC-SR04 Ultrasonic
StenBOT Robot Kit. Stensat Group LLC, Copyright 2018
 StenBOT Robot Kit 1 Stensat Group LLC, Copyright 2018 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the
StenBOT Robot Kit 1 Stensat Group LLC, Copyright 2018 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and documentation. There is a 90 day warranty for the
AndyMark Arduino Tutorial
 AndyMark Arduino Tutorial Tank Drive June 2014 Required: Required Software List: - Kit Arduino IDE - Robot Power Cable Kit (am-0975) RobotOpen Arduino Shield Software - Battery Base Package (am-0477) RobotOpen
AndyMark Arduino Tutorial Tank Drive June 2014 Required: Required Software List: - Kit Arduino IDE - Robot Power Cable Kit (am-0975) RobotOpen Arduino Shield Software - Battery Base Package (am-0477) RobotOpen
How to use the Zduino LEE Module with the Trainer Board
 How to use the Zduino LEE Module with the Trainer Board Note: If you are going to use the Arduino/Zduino module for this distance training workshop, please download the Arduino software: 1. Connections
How to use the Zduino LEE Module with the Trainer Board Note: If you are going to use the Arduino/Zduino module for this distance training workshop, please download the Arduino software: 1. Connections
Lesson 8: Digital Input, If Else
 Lesson 8 Lesson 8: Digital Input, If Else Digital Input, If Else The Big Idea: This lesson adds the ability of an Arduino sketch to respond to its environment, taking different actions for different situations.
Lesson 8 Lesson 8: Digital Input, If Else Digital Input, If Else The Big Idea: This lesson adds the ability of an Arduino sketch to respond to its environment, taking different actions for different situations.
THE COMPLETE ALL IN ONE ROBOT 360 NANO BOT
 THE COMPLETE ALL IN ONE ROBOT 360 NANO BOT LINE FOLLOWER FIVE LINE SENSORS FOR SCANNING WHITE OR BLACK LINE OBSTACLE AVOIDER TWO OBSTACLE SENSORS CAN DETECT OBSTACLES AND MEASURE DISTANCE BLUETOOTH CONTROL
THE COMPLETE ALL IN ONE ROBOT 360 NANO BOT LINE FOLLOWER FIVE LINE SENSORS FOR SCANNING WHITE OR BLACK LINE OBSTACLE AVOIDER TWO OBSTACLE SENSORS CAN DETECT OBSTACLES AND MEASURE DISTANCE BLUETOOTH CONTROL
Instructions for Installing FlashUpdate and Downloading Updates for Super Buddy Satellite Meter
 Instructions for Installing FlashUpdate and Downloading Updates for Super Buddy Satellite Meter Updates to the Field Guide and to the instrument firmware are available from the Applied Instruments website.
Instructions for Installing FlashUpdate and Downloading Updates for Super Buddy Satellite Meter Updates to the Field Guide and to the instrument firmware are available from the Applied Instruments website.
Arduino Programming and Interfacing
 Arduino Programming and Interfacing Stensat Group LLC, Copyright 2017 1 Robotic Arm Experimenters Kit 2 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and
Arduino Programming and Interfacing Stensat Group LLC, Copyright 2017 1 Robotic Arm Experimenters Kit 2 Legal Stuff Stensat Group LLC assumes no responsibility and/or liability for the use of the kit and
PID Controller application in robotics. Victor Abreu A /5/2013. Executive Summary:
 PID Controller application in robotics Victor Abreu A42379353 4/5/2013 Executive Summary: The proportional integral derivative controller is a generic control loop feedback mechanism that is widely used
PID Controller application in robotics Victor Abreu A42379353 4/5/2013 Executive Summary: The proportional integral derivative controller is a generic control loop feedback mechanism that is widely used
Note. The above image and many others are courtesy of - this is a wonderful resource for designing circuits.
 Robotics and Electronics Unit 2. Arduino Objectives. Students will understand the basic characteristics of an Arduino Uno microcontroller. understand the basic structure of an Arduino program. know how
Robotics and Electronics Unit 2. Arduino Objectives. Students will understand the basic characteristics of an Arduino Uno microcontroller. understand the basic structure of an Arduino program. know how
micro:bit Lesson 1. Using the Built-in Sensors
 micro:bit Lesson 1. Using the Built-in Sensors Created by Simon Monk Last updated on 2018-03-02 05:46:13 PM UTC Guide Contents Guide Contents Overview Magnetometer Magnet Detector High-strength 'rare earth'
micro:bit Lesson 1. Using the Built-in Sensors Created by Simon Monk Last updated on 2018-03-02 05:46:13 PM UTC Guide Contents Guide Contents Overview Magnetometer Magnet Detector High-strength 'rare earth'
mi:node User Manual Element14 element14.com/minode 1 User Manual V3.1
 mi:node User Manual Element14 element14.com/minode 1 Table of Contents 1) Introduction... 3 1.1 Overview... 3 1.2 Features... 3 1.3 Kit Contents... 3 2) Getting Started... 5 2.1 The Connector Board...
mi:node User Manual Element14 element14.com/minode 1 Table of Contents 1) Introduction... 3 1.1 Overview... 3 1.2 Features... 3 1.3 Kit Contents... 3 2) Getting Started... 5 2.1 The Connector Board...
Electricity. The only difference between a bolt of lightning and the spark between you finger and a doorknob pm a dry. Both are electricity
 Introduction to Lilypad Electricity The only difference between a bolt of lightning and the spark between you finger and a doorknob pm a dry day is QUALITY. Both are electricity You cannot see electricity!
Introduction to Lilypad Electricity The only difference between a bolt of lightning and the spark between you finger and a doorknob pm a dry day is QUALITY. Both are electricity You cannot see electricity!
Arduino Smart Bluetooth Robot Car Kit User Guide
 Arduino Smart Bluetooth Robot Car Kit User Guide UCTRONICS Table of Contents 1. Introduction... 4 1.1 Packing list... 5 2. Assembly... 6 2.1 Arduino Uno R3... 6 2.1.1 Specifications... 6 2.2 HC-SR04 Ultrasonic
Arduino Smart Bluetooth Robot Car Kit User Guide UCTRONICS Table of Contents 1. Introduction... 4 1.1 Packing list... 5 2. Assembly... 6 2.1 Arduino Uno R3... 6 2.1.1 Specifications... 6 2.2 HC-SR04 Ultrasonic
ARDUINO UNO R3 BASED 20A ROBOT CONTROL BOARD [RKI-1580] Page 1
![ARDUINO UNO R3 BASED 20A ROBOT CONTROL BOARD [RKI-1580] Page 1](/thumbs/73/69461282.jpg "ARDUINO UNO R3 BASED 20A ROBOT CONTROL BOARD [RKI-1580] Page 1") ARDUINO UNO R3 BASED 20A ROBOT CONTROL BOARD [RKI-1580] http://www.robokitsworld.com Page 1 1. Introduction: The Arduino UNO R3 based 20A robot control board is a versatile motor controller for driving
ARDUINO UNO R3 BASED 20A ROBOT CONTROL BOARD [RKI-1580] http://www.robokitsworld.com Page 1 1. Introduction: The Arduino UNO R3 based 20A robot control board is a versatile motor controller for driving
Introduction To Arduino
 Introduction To Arduino What is Arduino? Hardware Boards / microcontrollers Shields Software Arduino IDE Simplified C Community Tutorials Forums Sample projects Arduino Uno Power: 5v (7-12v input) Digital
Introduction To Arduino What is Arduino? Hardware Boards / microcontrollers Shields Software Arduino IDE Simplified C Community Tutorials Forums Sample projects Arduino Uno Power: 5v (7-12v input) Digital
EEG 101L INTRODUCTION TO ENGINEERING EXPERIENCE
 EEG 101L INTRODUCTION TO ENGINEERING EXPERIENCE LABORATORY 1: INTRODUCTION TO ARDUINO IDE AND PROGRAMMING DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING UNIVERSITY OF NEVADA, LAS VEGAS 1. FYS KIT COMPONENTS
EEG 101L INTRODUCTION TO ENGINEERING EXPERIENCE LABORATORY 1: INTRODUCTION TO ARDUINO IDE AND PROGRAMMING DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING UNIVERSITY OF NEVADA, LAS VEGAS 1. FYS KIT COMPONENTS
User Guide v1.0. v1.0 Oct 1, This guide is only available in English Ce manuel est seulement disponible en Anglais
 ROVER ShiELD User Guide v1.0 v1.0 Oct 1, 2014 This guide is only available in English Ce manuel est seulement disponible en Anglais Description The DFRobotShop Rover Shield is the ideal all in one shield
ROVER ShiELD User Guide v1.0 v1.0 Oct 1, 2014 This guide is only available in English Ce manuel est seulement disponible en Anglais Description The DFRobotShop Rover Shield is the ideal all in one shield
Modern Robotics Inc. Sensor Documentation
 Sensor Documentation Version 1.0.1 September 9, 2016 Contents 1. Document Control... 3 2. Introduction... 4 3. Three-Wire Analog & Digital Sensors... 5 3.1. Program Control Button (45-2002)... 6 3.2. Optical
Sensor Documentation Version 1.0.1 September 9, 2016 Contents 1. Document Control... 3 2. Introduction... 4 3. Three-Wire Analog & Digital Sensors... 5 3.1. Program Control Button (45-2002)... 6 3.2. Optical
Wall-Follower. Xiaodong Fang. EEL5666 Intelligent Machines Design Laboratory University of Florida School of Electrical and Computer Engineering
 Wall-Follower Xiaodong Fang EEL5666 Intelligent Machines Design Laboratory University of Florida School of Electrical and Computer Engineering TAs: Tim Martin Josh Weaver Instructors: Dr. A. Antonio Arroyo
Wall-Follower Xiaodong Fang EEL5666 Intelligent Machines Design Laboratory University of Florida School of Electrical and Computer Engineering TAs: Tim Martin Josh Weaver Instructors: Dr. A. Antonio Arroyo
J. La Favre Calibrating Sharp Distance Sensors July 18, 2018
 GEAR has a number of Sharp brand IR distance sensors that can be used to determine distance to a target object. This type of sensor can be useful for maze robot projects as well as others. Sharp offers
GEAR has a number of Sharp brand IR distance sensors that can be used to determine distance to a target object. This type of sensor can be useful for maze robot projects as well as others. Sharp offers
Module 003: Introduction to the Arduino/RedBoard
 Name/NetID: Points: /5 Module 003: Introduction to the Arduino/RedBoard Module Outline In this module you will be introduced to the microcontroller board included in your kit. You bought either An Arduino
Name/NetID: Points: /5 Module 003: Introduction to the Arduino/RedBoard Module Outline In this module you will be introduced to the microcontroller board included in your kit. You bought either An Arduino
HUB-ee BMD-S Arduino Proto Shield V1.1
 HUB-ee BMD-S Arduino Proto Shield V1.1 User guide and assembly instructions Document Version 0.5 Introduction & Board Guide 2 Schematic 3 Quick User Guide 4 Assembly Guide 6 Kit Contents 7 1) Diodes and
HUB-ee BMD-S Arduino Proto Shield V1.1 User guide and assembly instructions Document Version 0.5 Introduction & Board Guide 2 Schematic 3 Quick User Guide 4 Assembly Guide 6 Kit Contents 7 1) Diodes and
DFRobot CurieNano A mini Genuino/Arduino 101 Board SKU: DFR0453
 DFRobot CurieNano A mini Genuino/Arduino 101 Board SKU: DFR0453 From Robot Wiki Contents 1 Introduction 2 Specification 3 Board Overview 4 Tutorial o 4.1 Requirements o 4.2 Install Arduino/Genuino 101
DFRobot CurieNano A mini Genuino/Arduino 101 Board SKU: DFR0453 From Robot Wiki Contents 1 Introduction 2 Specification 3 Board Overview 4 Tutorial o 4.1 Requirements o 4.2 Install Arduino/Genuino 101
TA0297 WEMOS D1 R2 WIFI ARDUINO DEVELOPMENT BOARD ESP8266
 TA0297 WEMOS D1 R2 WIFI ARDUINO DEVELOPMENT BOARD ESP8266 Contents 1. Overview TA0297... 3 2. Getting started:... 3 2.1. What is WeMos D1 R2 Wifi Arduino Development Board?... 3 2.2. What is IDUINO UNO?...
TA0297 WEMOS D1 R2 WIFI ARDUINO DEVELOPMENT BOARD ESP8266 Contents 1. Overview TA0297... 3 2. Getting started:... 3 2.1. What is WeMos D1 R2 Wifi Arduino Development Board?... 3 2.2. What is IDUINO UNO?...
user manual Getting started... 3 Calibration... 3 Getting to know your robot... 4
 user manual Table of Contents Getting started... 3 Calibration... 3 Getting to know your robot... 4 Battery pack and power supply... 4 USB connector and power... 4 Arduino hardware... 5 Proximity sensor...
user manual Table of Contents Getting started... 3 Calibration... 3 Getting to know your robot... 4 Battery pack and power supply... 4 USB connector and power... 4 Arduino hardware... 5 Proximity sensor...
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur
 Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture - 23 Introduction to Arduino- II Hi. Now, we will continue
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture - 23 Introduction to Arduino- II Hi. Now, we will continue
ARDUINO M0 PRO Code: A000111
 ARDUINO M0 PRO Code: A000111 The Arduino M0 Pro is an Arduino M0 with a step by step debugger With the new Arduino M0 Pro board, the more creative individual will have the potential to create one s most
ARDUINO M0 PRO Code: A000111 The Arduino M0 Pro is an Arduino M0 with a step by step debugger With the new Arduino M0 Pro board, the more creative individual will have the potential to create one s most
Grove - 80cm Infrared Proximity Sensor
 Grove - 80cm Infrared Proximity Sensor Introduction 3.3V 5.0V Analog The 80cm Infrared Proximity Sensor is a General Purpose Type Distance Measuring Sensor. This sensor SharpGP2Y0A21YK, boasts a small
Grove - 80cm Infrared Proximity Sensor Introduction 3.3V 5.0V Analog The 80cm Infrared Proximity Sensor is a General Purpose Type Distance Measuring Sensor. This sensor SharpGP2Y0A21YK, boasts a small
Micro:bit - an Educational & Creative Tool for Kids
 Micro:bit - an Educational & Creative Tool for Kids SKU:DFR0497 INTRODUCTION micro:bit is a pocket-sized microcontroller designed for kids and beginners learning how to program, letting them easily bring
Micro:bit - an Educational & Creative Tool for Kids SKU:DFR0497 INTRODUCTION micro:bit is a pocket-sized microcontroller designed for kids and beginners learning how to program, letting them easily bring
EV3 Programming Workshop for FLL Coaches
 EV3 Programming Workshop for FLL Coaches Tony Ayad 2017 Outline This workshop is intended for FLL coaches who are interested in learning about Mindstorms EV3 programming language. Programming EV3 Controller
EV3 Programming Workshop for FLL Coaches Tony Ayad 2017 Outline This workshop is intended for FLL coaches who are interested in learning about Mindstorms EV3 programming language. Programming EV3 Controller
EXERCISE 2: GETTING STARTED WITH FUSION
 Document Updated: May, 2010 Fusion v2.8 Introduction In this exercise, you ll be using the fully-prepared example data to explore the basics of FUSION. Prerequisites Successful completion of Exercise 1
Document Updated: May, 2010 Fusion v2.8 Introduction In this exercise, you ll be using the fully-prepared example data to explore the basics of FUSION. Prerequisites Successful completion of Exercise 1
Clark College Electrical Engineering & Computer Science
 Clark College Electrical Engineering & Computer Science slide # 1 http://www.engrcs.com/ecsv5.pdf Electrical Engineering & Computer Science Artificial Intelligent (AI) Bio Medical Computers & Digital Systems
Clark College Electrical Engineering & Computer Science slide # 1 http://www.engrcs.com/ecsv5.pdf Electrical Engineering & Computer Science Artificial Intelligent (AI) Bio Medical Computers & Digital Systems
Robotics Jumpstart Training II. EasyC: Software & Firmware Updates
 Robotics Jumpstart Training II EasyC: Software & Firmware Updates Objectives: Learn how to update EasyC Current Version: 4.2.1.9 Learn how to update Firmware VEX Joystick (Controller) VEX Microcontroller
Robotics Jumpstart Training II EasyC: Software & Firmware Updates Objectives: Learn how to update EasyC Current Version: 4.2.1.9 Learn how to update Firmware VEX Joystick (Controller) VEX Microcontroller
How-To #7: Assemble an H-bridge Circuit Board
 How-To #7: Assemble an H-bridge Circuit Board Making a DC motor turn is relatively easy: simply connect the motor's terminals to a power supply. But what if the motor is to be controlled by an Arduino,
How-To #7: Assemble an H-bridge Circuit Board Making a DC motor turn is relatively easy: simply connect the motor's terminals to a power supply. But what if the motor is to be controlled by an Arduino,
Halloween Pumpkinusing. Wednesday, October 17, 12
 Halloween Pumpkinusing Blink LED 1 What you will need: 1 MSP-EXP430G2 1 3 x 2 Breadboard 3 560 Ohm Resistors 3 LED s (in Red Color Range) 3 Male to female jumper wires 1 Double AA BatteryPack 2 AA Batteries
Halloween Pumpkinusing Blink LED 1 What you will need: 1 MSP-EXP430G2 1 3 x 2 Breadboard 3 560 Ohm Resistors 3 LED s (in Red Color Range) 3 Male to female jumper wires 1 Double AA BatteryPack 2 AA Batteries
SECOND EDITION. Arduino Cookbook. Michael Margolis O'REILLY- Tokyo. Farnham Koln Sebastopol. Cambridge. Beijing
 SECOND EDITION Arduino Cookbook Michael Margolis Beijing Cambridge Farnham Koln Sebastopol O'REILLY- Tokyo Table of Contents Preface xi 1. Getting Started 1 1.1 Installing the Integrated Development Environment
SECOND EDITION Arduino Cookbook Michael Margolis Beijing Cambridge Farnham Koln Sebastopol O'REILLY- Tokyo Table of Contents Preface xi 1. Getting Started 1 1.1 Installing the Integrated Development Environment
LV8548MCSLDGEVB. Brush DC Motor Driver Module Solution Kit Quick Start Guide
 LV8548MCSLDGEVB Brush DC Motor Driver Module Solution Kit Quick Start Guide Overview The LV8548MCSLDGEVB is an ON Semiconductor motor driver module featuring the LV8548MC. This module is capable of easily
LV8548MCSLDGEVB Brush DC Motor Driver Module Solution Kit Quick Start Guide Overview The LV8548MCSLDGEVB is an ON Semiconductor motor driver module featuring the LV8548MC. This module is capable of easily
Freeduino USB 1.0. Arduino Compatible Development Board Starter Guide. 1. Overview
 Freeduino USB 1.0 Arduino Compatible Development Board Starter Guide 1. Overview 1 Arduino is an open source embedded development platform consisting of a simple development board based on Atmel s AVR
Freeduino USB 1.0 Arduino Compatible Development Board Starter Guide 1. Overview 1 Arduino is an open source embedded development platform consisting of a simple development board based on Atmel s AVR
Autonomous, Surveillance Fire Extinguisher Robotic Vehicle with Obstacle Detection and Bypass using Arduino Microcontroller
 Autonomous, Surveillance Fire Extinguisher Robotic Vehicle with Obstacle Detection and Bypass using Arduino Microcontroller Sumanta Chatterjee Asst. Professor JIS College of Engineering Kalyani, WB, India
Autonomous, Surveillance Fire Extinguisher Robotic Vehicle with Obstacle Detection and Bypass using Arduino Microcontroller Sumanta Chatterjee Asst. Professor JIS College of Engineering Kalyani, WB, India
Goal: We want to build an autonomous vehicle (robot)
") Goal: We want to build an autonomous vehicle (robot) This means it will have to think for itself, its going to need a brain Our robot s brain will be a tiny computer called a microcontroller Specifically
Goal: We want to build an autonomous vehicle (robot) This means it will have to think for itself, its going to need a brain Our robot s brain will be a tiny computer called a microcontroller Specifically
PS2 Controller Starter Kit SKPS
 PS2 Controller Starter Kit SKPS User s Manual V1.0 Oct 2008 Information contained in this publication regarding device applications and the like is intended through suggestion only and may be superseded
PS2 Controller Starter Kit SKPS User s Manual V1.0 Oct 2008 Information contained in this publication regarding device applications and the like is intended through suggestion only and may be superseded
Touch Board User Guide. Introduction
 Touch Board User Guide Introduction The Crazy Circuits Touch Board is a fun way to create interactive projects. The Touch Board has 11 built in Touch Points for use with projects and also features built
Touch Board User Guide Introduction The Crazy Circuits Touch Board is a fun way to create interactive projects. The Touch Board has 11 built in Touch Points for use with projects and also features built
How-To #3: Make and Use a Motor Controller Shield
 How-To #3: Make and Use a Motor Controller Shield The Arduino single-board computer can be used to control servos and motors. But sometimes more current is required than the Arduino can provide, either
How-To #3: Make and Use a Motor Controller Shield The Arduino single-board computer can be used to control servos and motors. But sometimes more current is required than the Arduino can provide, either
Arduino Internals. Dale Wheat. Apress
 Arduino Internals Dale Wheat Apress Contents About the Authors About the Technical Reviewers Acknowledgments Preface xv xvi xvii xviii Chapter 1: Hardware 1 What Is an Arduino? 1 The Arduino Uno 2 Processor
Arduino Internals Dale Wheat Apress Contents About the Authors About the Technical Reviewers Acknowledgments Preface xv xvi xvii xviii Chapter 1: Hardware 1 What Is an Arduino? 1 The Arduino Uno 2 Processor
VEX Startup and Configuration Procedures
 VEX Startup and Configuration Procedures Power Up Open RobotC Step 2 Plug battery into the Cortex power port. The plug is keyed to only install one way. Black wire will face to the outside of the Cortex.
VEX Startup and Configuration Procedures Power Up Open RobotC Step 2 Plug battery into the Cortex power port. The plug is keyed to only install one way. Black wire will face to the outside of the Cortex.
Grove - 80cm Infrared Proximity Sensor User Manual
 Grove - 80cm Infrared Proximity Sensor User Manual Release date: 2015/9/22 Version: 1.0 Wiki: http://www.seeedstudio.com/wiki/index.php?title=twig_-_80cm_infrared_proximity_sensor_v0.9 Bazaar: http://www.seeedstudio.com/depot/grove-80cm-infrared-
Grove - 80cm Infrared Proximity Sensor User Manual Release date: 2015/9/22 Version: 1.0 Wiki: http://www.seeedstudio.com/wiki/index.php?title=twig_-_80cm_infrared_proximity_sensor_v0.9 Bazaar: http://www.seeedstudio.com/depot/grove-80cm-infrared-
Arduino Uno. Arduino Uno R3 Front. Arduino Uno R2 Front
 Arduino Uno Arduino Uno R3 Front Arduino Uno R2 Front Arduino Uno SMD Arduino Uno R3 Back Arduino Uno Front Arduino Uno Back Overview The Arduino Uno is a microcontroller board based on the ATmega328 (datasheet).
Arduino Uno Arduino Uno R3 Front Arduino Uno R2 Front Arduino Uno SMD Arduino Uno R3 Back Arduino Uno Front Arduino Uno Back Overview The Arduino Uno is a microcontroller board based on the ATmega328 (datasheet).
PMS5005 Sensing and Motion Controller User Manual
 PMS5005 Sensing and Motion Controller User Manual Version: 1.0.5 June 2006 Table of Contents I. Introduction 2 I.1. PMS5005 Robot Sensing/Motion Controller Architecture 2 I.2. PMS5005 Connectors and Jumpers
PMS5005 Sensing and Motion Controller User Manual Version: 1.0.5 June 2006 Table of Contents I. Introduction 2 I.1. PMS5005 Robot Sensing/Motion Controller Architecture 2 I.2. PMS5005 Connectors and Jumpers
Objectives: Learn how to input and output analogue values Be able to see what the Arduino is thinking by sending numbers to the screen
 Objectives: Learn how to input and output analogue values Be able to see what the Arduino is thinking by sending numbers to the screen By the end of this session: You will know how to write a program to
Objectives: Learn how to input and output analogue values Be able to see what the Arduino is thinking by sending numbers to the screen By the end of this session: You will know how to write a program to
University of Hull Department of Computer Science C4DI Interfacing with Arduinos
 Introduction Welcome to our Arduino hardware sessions. University of Hull Department of Computer Science C4DI Interfacing with Arduinos Vsn. 1.0 Rob Miles 2014 Please follow the instructions carefully.
Introduction Welcome to our Arduino hardware sessions. University of Hull Department of Computer Science C4DI Interfacing with Arduinos Vsn. 1.0 Rob Miles 2014 Please follow the instructions carefully.
Table of Contents 1 ABOUT THIS GUIDE CONTACT INFORMATION ANTENNA INSTALLATION... 4
 Table of Contents 1 ABOUT THIS GUIDE... 3 1.1 CONTACT INFORMATION... 3 2 ANTENNA INSTALLATION... 4 2.1 GENERAL INFORMATION... 4 2.2 SPECIFIC MOUNTING EXAMPLES... 5 2.3 CONNECTOR MOISTURE PROTECTION...
Table of Contents 1 ABOUT THIS GUIDE... 3 1.1 CONTACT INFORMATION... 3 2 ANTENNA INSTALLATION... 4 2.1 GENERAL INFORMATION... 4 2.2 SPECIFIC MOUNTING EXAMPLES... 5 2.3 CONNECTOR MOISTURE PROTECTION...
Introduction to ARDUINO/SIMULINK
 Introduction to ARDUINO/SIMULINK Lab Objectives Install and verify Arduino software package for Simulink using a digital output to light a LED Communicate with the target board (Arduino) using external
Introduction to ARDUINO/SIMULINK Lab Objectives Install and verify Arduino software package for Simulink using a digital output to light a LED Communicate with the target board (Arduino) using external
Advanced Debugging I. Equipment Required. Preliminary Discussion. Basic System Bring-up. Hardware Bring-up, Section Plan
 Advanced Debugging I Hardware Bring-up, Section Plan Equipment Required 192 car Logic analyzer with mini probes, cable PC scope with probes, M-F breadboard wire, USB cable Voltmeter Laptop with mouse,
Advanced Debugging I Hardware Bring-up, Section Plan Equipment Required 192 car Logic analyzer with mini probes, cable PC scope with probes, M-F breadboard wire, USB cable Voltmeter Laptop with mouse,
Academic Year Annexure I. 1. Project Title: Color sensor based multiple line follower robot with obstacle detection
 Academic Year 2015-16 Annexure I 1. Project Title: Color sensor based multiple line follower robot with obstacle detection TABLE OF CONTENTS 1.1 Abstract 2-2 1.2 Motivation 3-3 1.3 Objective 3-3 2.1 Block
Academic Year 2015-16 Annexure I 1. Project Title: Color sensor based multiple line follower robot with obstacle detection TABLE OF CONTENTS 1.1 Abstract 2-2 1.2 Motivation 3-3 1.3 Objective 3-3 2.1 Block
ARDUINO MEGA 2560 REV3 Code: A000067
 ARDUINO MEGA 2560 REV3 Code: A000067 The MEGA 2560 is designed for more complex projects. With 54 digital I/O pins, 16 analog inputs and a larger space for your sketch it is the recommended board for 3D
ARDUINO MEGA 2560 REV3 Code: A000067 The MEGA 2560 is designed for more complex projects. With 54 digital I/O pins, 16 analog inputs and a larger space for your sketch it is the recommended board for 3D
Profi4 Main Board Manual
 Profi4 Main Board Manual A. Scope of application It is used to run the signal processing of the host computer ( LPT port ), with MACH 3 CNC system software, and the peripheral machine dynamic electrical.
Profi4 Main Board Manual A. Scope of application It is used to run the signal processing of the host computer ( LPT port ), with MACH 3 CNC system software, and the peripheral machine dynamic electrical.
3. The circuit is composed of 1 set of Relay circuit.
 Part Number : Product Name : FK-FA1420 ONE CHANNEL 12V RELAY MODULE This is the experimental module for a relay controller as the fundamental controlling programming. It is adaptable or is able to upgrade
Part Number : Product Name : FK-FA1420 ONE CHANNEL 12V RELAY MODULE This is the experimental module for a relay controller as the fundamental controlling programming. It is adaptable or is able to upgrade
Web Site: Forums: forums.parallax.com Sales: Technical:
 Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical: support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Sten-SLATE ESP Kit. Description and Programming
 Sten-SLATE ESP Kit Description and Programming Stensat Group LLC, Copyright 2016 Overview In this section, you will be introduced to the processor board electronics and the arduino software. At the end
Sten-SLATE ESP Kit Description and Programming Stensat Group LLC, Copyright 2016 Overview In this section, you will be introduced to the processor board electronics and the arduino software. At the end
Alessandra de Vitis. Arduino
 Alessandra de Vitis Arduino Arduino types Alessandra de Vitis 2 Interfacing Interfacing represents the link between devices that operate with different physical quantities. Interface board or simply or
Alessandra de Vitis Arduino Arduino types Alessandra de Vitis 2 Interfacing Interfacing represents the link between devices that operate with different physical quantities. Interface board or simply or
Configuring the LI-1400 Datalogger for Illuminance and Irradiance Studies
 Application Note Configuring the LI-1400 Datalogger for Illuminance and Irradiance Studies Introduction This document describes how to configure and deploy the LI-COR LI-1400 Datalogger (Figure 1) and
Application Note Configuring the LI-1400 Datalogger for Illuminance and Irradiance Studies Introduction This document describes how to configure and deploy the LI-COR LI-1400 Datalogger (Figure 1) and
Robotics 2c. The Programming Interface
 Robotics 2c What we re going to do in this session. Introduce you to the Lego Mindstorm Programming Interface. The Programming Interface The Lego Mindstorm EV3 kit uses a proprietary interface with its
Robotics 2c What we re going to do in this session. Introduce you to the Lego Mindstorm Programming Interface. The Programming Interface The Lego Mindstorm EV3 kit uses a proprietary interface with its
Sense Autonomous 2_11. All rights reserved.
 Sense Autonomous Sense Autonomous 2_11 All rights reserved. The material in this book may not be copied, duplicated, printed, translated, re-edited or broadcast without prior agreement in writing. For
Sense Autonomous Sense Autonomous 2_11 All rights reserved. The material in this book may not be copied, duplicated, printed, translated, re-edited or broadcast without prior agreement in writing. For
Hardware Overview and Features
 Hardware Overview and Features Don t snap apart your LilyPad ProtoSnap Plus until you're ready to use the pieces in a project. If you leave the pieces attached to the board, you'll be able to prototype
Hardware Overview and Features Don t snap apart your LilyPad ProtoSnap Plus until you're ready to use the pieces in a project. If you leave the pieces attached to the board, you'll be able to prototype
Scratch 2.0 Wireless Programming Guide for Vortex
 Scratch 2.0 Wireless Programming Guide for Vortex DF4Scratch Service Vortex is a programmable robot developed by DFRobot. Based on the Arduino developing platform, Vortex is equipped with Atmega328 Arduino
Scratch 2.0 Wireless Programming Guide for Vortex DF4Scratch Service Vortex is a programmable robot developed by DFRobot. Based on the Arduino developing platform, Vortex is equipped with Atmega328 Arduino
Activity Guide - Will it Crash?
 Unit 5 - Lesson 9 Name(s) Period Date Activity Guide - Will it Crash? Let s play a game: Will it Crash? Each row in the table below presents a small program that uses if-statements and robot commands.
Unit 5 - Lesson 9 Name(s) Period Date Activity Guide - Will it Crash? Let s play a game: Will it Crash? Each row in the table below presents a small program that uses if-statements and robot commands.
MAE106 Laboratory Exercises Lab # 1 - Laboratory tools
 MAE106 Laboratory Exercises Lab # 1 - Laboratory tools University of California, Irvine Department of Mechanical and Aerospace Engineering Goals To learn how to use the oscilloscope, function generator,
MAE106 Laboratory Exercises Lab # 1 - Laboratory tools University of California, Irvine Department of Mechanical and Aerospace Engineering Goals To learn how to use the oscilloscope, function generator,
Laboratory 1 Introduction to the Arduino boards
 Laboratory 1 Introduction to the Arduino boards The set of Arduino development tools include µc (microcontroller) boards, accessories (peripheral modules, components etc.) and open source software tools
Laboratory 1 Introduction to the Arduino boards The set of Arduino development tools include µc (microcontroller) boards, accessories (peripheral modules, components etc.) and open source software tools
970 Serials Lights. Multi-Function Lights System FEATURES SPECIFICATION
 970 Serials Lights Multi-Function Lights System FEATURES Suitable for Marine & Vehicle Easy to install & Easily relearning Remote Unit Wide Range Rotation movement. Dual Function Control with Wire Control
970 Serials Lights Multi-Function Lights System FEATURES Suitable for Marine & Vehicle Easy to install & Easily relearning Remote Unit Wide Range Rotation movement. Dual Function Control with Wire Control
IME-100 Interdisciplinary Design and Manufacturing
 IME-100 Interdisciplinary Design and Manufacturing Introduction Arduino and Programming Topics: 1. Introduction to Microprocessors/Microcontrollers 2. Introduction to Arduino 3. Arduino Programming Basics
IME-100 Interdisciplinary Design and Manufacturing Introduction Arduino and Programming Topics: 1. Introduction to Microprocessors/Microcontrollers 2. Introduction to Arduino 3. Arduino Programming Basics
Intel Galileo gen 2 Board
 Intel Galileo gen 2 Board The Arduino Intel Galileo board is a microcontroller board based on the Intel Quark SoC X1000, a 32- bit Intel Pentium -class system on a chip (SoC). It is the first board based
Intel Galileo gen 2 Board The Arduino Intel Galileo board is a microcontroller board based on the Intel Quark SoC X1000, a 32- bit Intel Pentium -class system on a chip (SoC). It is the first board based
RoboStamp Basic Software (A tutorial by Technotutorz)
") RoboStamp Basic Software (A tutorial by ) The Robostamp robotic kit is one of the robots used as standard in the workshops. Two versions can be built up: the izebot and the RoboTank. The Robostamp can
RoboStamp Basic Software (A tutorial by ) The Robostamp robotic kit is one of the robots used as standard in the workshops. Two versions can be built up: the izebot and the RoboTank. The Robostamp can