LOGISMOS Cost Function Design
|
|
|
- Arnold Miller
- 5 years ago
- Views:
Transcription

1 LOGISMOS Cost Function Design MICCAI 2010 Tutorial: Graph Algorithmic Techniques for Biomedical Image Segmentation Mona K. Garvin, Ph.D. The University of Iowa
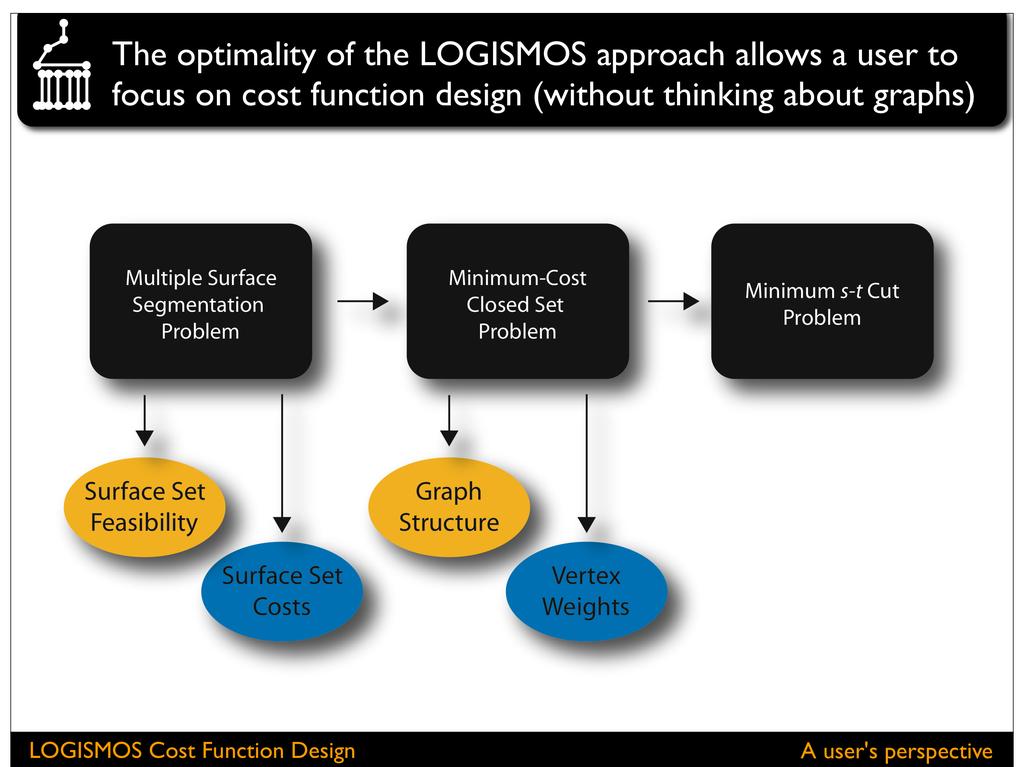
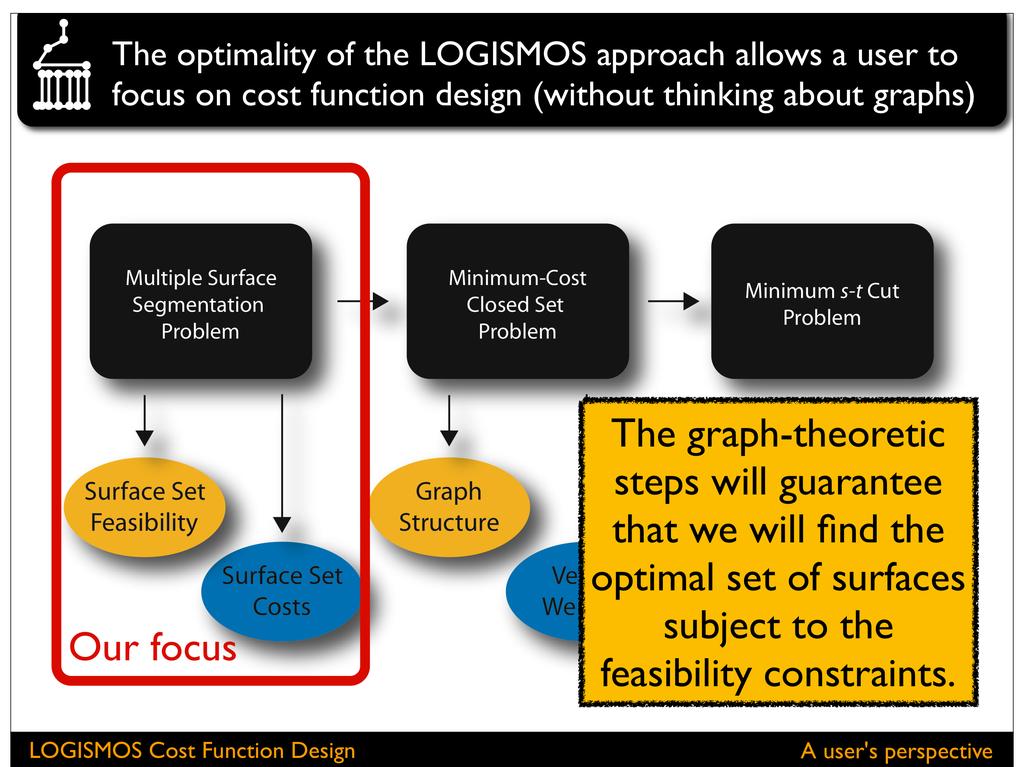
2 Overview Part I A user s perspective of LOGISMOS cost function design (no graphs!) input cost functions + constraints Part II Representation of LOGISMOS cost functions in graphs optimal surface set
3 Part I: A user s perspective of LOGISMOS cost function design (no graphs!)
4
5
6
7
8
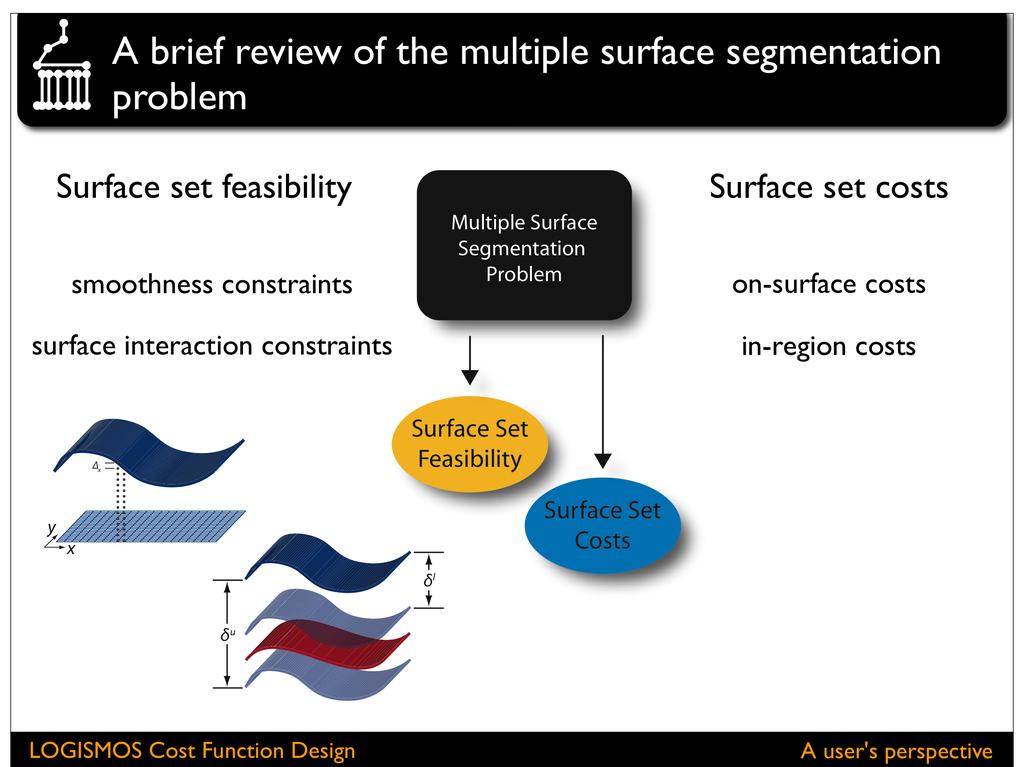
9 Two categories of cost functions On-surface costs In-region costs
10 Two categories of cost functions On-surface costs In-region costs On-surface costs re ect the unlikeliness of belonging to particular surfaces.
11 On-surface costs re ect the unlikeliness of belonging to particular surfaces Each voxel has n on-surface costs corresponding to the unlikeliness of belonging to each surface. Cost of a surface f i(x, y): C fi (x,y) = {(x,y,z) z=f i (x,y)} Cost of a surface set {f 1(x, y),..., fn(x, y)}: n C {f1 (x,y),...,f n (x,y)} = i=1 c surfi (x, y, z) C fi (x,y)
12 Example using only on-surface costs Find indicated 7 surfaces in OCT image using only on-surface costs. OCT Image


13 Example using only on-surface costs OCT Image Encourage dark-to-bright transitions Encourage bright-to-dark transitions
14 Example using only on-surface costs Seven cost images: OCT Image
15 Example using only on-surface costs OCT Image D-B 1 Seven cost images:
16 Example using only on-surface costs D-B B-D 1 2 Seven cost images: OCT Image
17 Example using only on-surface costs 1 Seven cost images: D-B B-D B-D OCT Image 1 2 3
18 1 Example using only on-surface costs Seven cost images: D-B B-D B-D D-B OCT Image
19 1 Example using only on-surface costs Seven cost images: D-B B-D B-D D-B B-D OCT Image 5
20 1 Example using only on-surface costs Seven cost images: D-B B-D B-D D-B B-D D-B 3 4 OCT Image 5 6
21 1 Example using only on-surface costs Seven cost images: D-B B-D B-D D-B B-D D-B 3 B-D 4 OCT Image 5 6 7
22 1 Example using only on-surface costs Seven cost images: D-B B-D B-D D-B B-D D-B 3 B-D 4 OCT Image smoothness constraints + thickness constraints
23 Example using only on-surface costs A non-optimal set of surfaces 1 Seven cost images: D-B B-D B-D D-B B-D D-B 3 B-D 4 OCT Image 5 6 7
24 Example using only on-surface costs OCT Image Result The optimal set of surfaces
25 Two categories of cost functions (x,y,z) R 2 c reg2 (x, y, z) On-surface costs In-region costs (x,y,z) R 1 c reg1 (x, y, z) (x,y,z) R 0 c reg0 (x, y, z) In-region costs re ect the unlikeliness of belonging to particular regions.
26 In-region costs re ect the unlikeliness of belonging to particular regions Having n surfaces corresponds to n+1 regions. Each voxel has n+1 in-region costs corresponding to the unlikeliness of belonging to each region. Cost of a region: C Ri = (x,y,z) R i c regi (x, y, z) Cost of a surface set {f 1(x, y),..., fn(x, y)}: n C {f1 (x,y),f 2 (x,y),...,f n (x,y)} = i=0 C Ri
27 Example using only in-region costs OCT Image (labeled surfaces) Find indicated 7 surfaces in OCT image using only in-region costs.
28 Example using only in-region costs OCT Image (labeled regions) Find indicated 7 surfaces in OCT image using only in-region costs.
29 Example using only in-region costs OCT Image (labeled regions) Eight cost images:
30 Example using only in-region costs OCT Image (labeled regions) Eight cost images: D D 0 3 D D 5 7 (variations to emphasize dark regions)
31 Example using only in-region costs OCT Image (labeled regions) Eight cost images: D B D D B D (variations to emphasize bright regions)
32 Example using only in-region costs Eight cost images: D B M D M D B D 6 7 OCT Image (labeled regions) (variations to emphasize medium regions)
33 Example using only in-region costs OCT Image (labeled regions) Eight cost images: D B M D M D B smoothness constraints + thickness constraints 7 D
34 Example using only in-region costs A non-optimal set of surfaces Eight cost images: D B M D M D B D OCT Image (labeled regions)
35 Example using only in-region costs OCT Image Result The optimal set of surfaces
36 Cost function using both on-surface and in-region costs (x,y,z) R 2 c reg2 (x, y, z) {(x,y,z) z=f 2 (x,y)} c surf 2 (x, y, z) (x,y,z) R 1 c reg1 (x, y, z) (x,y,z) R 0 c reg0 (x, y, z) {(x,y,z) z=f 1 (x,y)} c surf 1 (x, y, z)
37 Cost function using both on-surface and in-region costs Surface set cost function: C {f1 (x,y),f 2 (x,y),...,f n (x,y)} = n n C fi (x,y) + i=1 i=0 C Ri (x,y,z) R 2 c reg2 (x, y, z) (x,y,z) R 1 c reg1 (x, y, z) (x,y,z) R 0 c reg0 (x, y, z) {(x,y,z) z=f 2 (x,y)} c surf 2 (x, y, z) {(x,y,z) z=f 1 (x,y)} c surf 1 (x, y, z) On-surface costs: C fi (x,y) = c surfi (x, y, z) {(x,y,z) z=f i (x,y)} In-region costs: C Ri = c regi (x, y, z) (x,y,z) R i
38 Example using both on-surface and in-region costs Find indicated 7 surfaces in OCT image using both on-surface and in-region costs. OCT Image
39 Example using both on-surface and in-region costs Seven on-surface and eight in-region cost images: D-B B-D B-D D-B B-D D-B B-D surf1 surf2 surf3 surf4 surf5 surf6 surf7 D B M D M D B D reg0 reg1 reg2 reg3 reg4 reg5 reg6 reg7

40 Example using both on-surface and in-region costs OCT Image Result The optimal set of surfaces
41 Part II: Representation of LOGISMOS cost functions in graphs Graph representation
42 Goal: ensure cost of surface set corresponds (within a constant) to cost of corresponding closed set Surface set cost: Closed set cost: n C fi (x,y) + n C Ri n C fi (x,y) + n C Ri + K i=1 i=0 i=1 i=0 Minimum surface set cost Minimum closed set Graph representation
43 Two categories of cost functions On-surface costs In-region costs Graph representation
44 Two categories of cost functions On-surface costs In-region costs Graph representation
45 On-surface cost representation (x,y,z) R 2 c reg2 (x, y, z) {(x,y,z) z=f 2 (x,y)} c surf 2 (x, y, z) (x,y,z) R 1 c reg1 (x, y, z) (x,y,z) R 0 c reg0 (x, y, z) {(x,y,z) z=f 1 (x,y)} c surf 1 (x, y, z) Graph representation

 if z =0 c")
 otherwise Graph")
46 On-surface cost representation node weight: w on surfi (x, y, z) = { c surfi (x, y, z) if z =0 c surfi (x, y, z) c surfi (x, y, z 1) otherwise Graph representation
47 Graph representation of on-surface costs (toy example) cost image graph representation Graph representation
48 Graph representation of on-surface costs (toy example) surf. cost= cost image graph representation Graph representation
49 Graph representation of on-surface costs (toy example) surf. cost= CS cost= cost image graph representation Graph representation
50 Graph representation of on-surface costs (toy example) Problem: empty closed set less expensive! surf. cost= CS cost= cost image graph representation Graph representation
51 Graph representation of on-surface costs (toy example) Ensure non-empty closed set will be minimum cost image subtract (sum of last row + 1) = graph representation Graph representation
52 Graph representation of on-surface costs (toy example) cost image graph representation Graph representation
53 Graph representation of on-surface costs (toy example) cost image surf. cost=50 CS cost= K + 50 (K = -181) graph representation Graph representation
54 Two categories of cost functions On-surface costs In-region costs Graph representation
55 In-region cost representation (x,y,z) R 2 c reg2 (x, y, z) {(x,y,z) z=f 2 (x,y)} c surf 2 (x, y, z) (x,y,z) R 1 c reg1 (x, y, z) (x,y,z) R 0 c reg0 (x, y, z) {(x,y,z) z=f 1 (x,y)} c surf 1 (x, y, z) Graph representation
56 In-region cost representation (x,y,z) R2 creg 2 (x,y,z) R1 creg 1 (x, y, z) (x, y, z) node weight (in subgraph associated with surface i) w in regi (x, y, z) =c regi 1 (x, y, z) c regi (x, y, z) (region below) (region above) (x,y,z) R0 creg 0 (x, y, z) + (x,y,z) R 2 c reg2 (x, y, z) + (x,y,z) R 1 c reg2 (x, y, z) + _ (x,y,z) R 1 c reg2 (x, y, z) _ (x,y,z) R 0 c reg2 (x, y, z) (x,y,z) R 0 c reg2 (x, y, z) used Used with surface surface (x,y,z) R 1 c reg1 (x, y, z) + _ + (x,y,z) R 0 c reg1 (x, y, z) (x,y,z) R 0 c reg1 (x, y, z) used with surface 1 Used with surface 1 (x,y,z) R 0 c reg0 (x, y, z) Graph representation
57 In-region cost representation node (x,y,z) R2 creg (x, y, z) 2 (x,y,z) R1 creg 1 (x, y, z) weight (in subgraph associated with surface i) w in regi (x, y, z) =c regi 1 (x, y, z) c regi (x, y, z) (region below) (region above) (x,y,z) R0 creg 0 (x, y, z) + (x,y,z) R 2 c reg2 (x, y, z) + (x,y,z) R 1 c reg2 (x, y, z) + _ (x,y,z) R 1 c reg2 (x, y, z) _ (x,y,z) R 0 c reg2 (x, y, z) (x,y,z) R 0 c reg2 (x, y, z) used Used with surface surface (x,y,z) R 1 c reg1 (x, y, z) + _ + (x,y,z) R 0 c reg1 (x, y, z) closed set (CS) costs (x,y,z) R 0 c reg1 (x, y, z) used with surface 1 Used with surface 1 (x,y,z) R 0 c reg0 (x, y, z) constant Graph representation
58 Graph representation of in-region costs (toy example) Region 2 Region 1 Region 0 Graph 2 Graph 1 Graph representation
59 Graph representation of in-region costs (toy example) Region 2 Region 1 Region 0 Graph 2 Graph 1 Region Cost = 120 CS Cost = -320 Graph representation
60 Graph representation of in-region costs (toy example) Region 2 Region 1 Region 0 Graph 2 Graph 1 Total from 2 = 440 = -K CS Cost = = Graph representation
61 Graph representation of in-region costs (toy example) Region 2 Region 1 Region 0 Graph 2 Graph 1 Total from 2 = 440 = -K K=-440 CS Cost = = K Graph representation
62 Graph representation of in-region costs (toy example) Region 2 Region 1 Region 0 Graph 2 Graph 1 Region Cost = 120 K=-440 CS Cost = = K Graph representation
63 Summary and references Summary
64 Summary Two major cost function types for a set of surfaces: On-surface costs re ect the unlikeliness of belonging to particular surfaces. In-region costs re ect the unlikeliness of belonging to particular regions. The underlying optimality of the LOGISMOS approach allows one to design cost functions without having to think about the graph representation. The cost of a set of surfaces (using on-surface and inregion cost functions) is re ected in the vertex weights of the graph (so that the cost of the closed set corresponds, within a constant, to the cost of the set of surfaces). Summary
65 References K. Li, X. Wu, D. Z. Chen, and M. Sonka, Optimal surface segmentation in volumetric images A graph-theoretic approach, IEEE Trans. Pattern Anal. Mach. Intell., vol. 28, no. 1, pp , Jan M. Haeker (Garvin), X. Wu, M. D. Abràmoff, R. Kardon, and M. Sonka, Incorporation of regional information in optimal 3-D graph search with application for intraretinal layer segmentation of optical coherence tomography images, in IPMI 2007, LNCS, vol. 4584, Springer, 2007, pp M. K. Garvin, M. D. Abràmoff, X. Wu, S. R. Russell, T. L. Burns, and M. Sonka, Automated 3-D intraretinal layer segmentation of macular spectral-domain optical coherence tomography images, IEEE Trans. Med. Imag., 2009, vol. 28, no. 9, pp , Sept Y. Yin, X. Zhang, R. Williams, X. Wu, D. D. Anderson, M. Sonka, LOGISMOS Layered Optimal Graph Image Segmentation of Multiple Objects and Surfaces: Cartilage Segmentation in the Knee Joint, IEEE Trans. Med. Imag., in press. Summary
Graph-Based Image Segmentation: LOGISMOS. Milan Sonka & The IIBI Team
 Graph-Based Image Segmentation: LOGISMOS Milan Sonka & The IIBI Team Iowa Institute for Biomedical Imaging The University of Iowa, Iowa City, IA, USA Background Computer-aided segmentation of medical images
Graph-Based Image Segmentation: LOGISMOS Milan Sonka & The IIBI Team Iowa Institute for Biomedical Imaging The University of Iowa, Iowa City, IA, USA Background Computer-aided segmentation of medical images
Pathology Hinting as the Combination of Automatic Segmentation with a Statistical Shape Model
 Pathology Hinting as the Combination of Automatic Segmentation with a Statistical Shape Model Pascal A. Dufour 12,HannanAbdillahi 3, Lala Ceklic 3,Ute Wolf-Schnurrbusch 23,JensKowal 12 1 ARTORG Center
Pathology Hinting as the Combination of Automatic Segmentation with a Statistical Shape Model Pascal A. Dufour 12,HannanAbdillahi 3, Lala Ceklic 3,Ute Wolf-Schnurrbusch 23,JensKowal 12 1 ARTORG Center
Graph-Based Retinal Fluid Segmentation from OCT Images
 Graph-Based Retinal Fluid Segmentation from OCT Images Ipek Oguz 1,2, Li Zhang 1,3, Michael D. Abràmoff 1,2,3,4,5, and Milan Sonka 1,3,4,2 1 The Iowa Institute for Biomedical Imaging 2 Department of Ophthalmology
Graph-Based Retinal Fluid Segmentation from OCT Images Ipek Oguz 1,2, Li Zhang 1,3, Michael D. Abràmoff 1,2,3,4,5, and Milan Sonka 1,3,4,2 1 The Iowa Institute for Biomedical Imaging 2 Department of Ophthalmology
Pathology Hinting as the Combination of Automatic Segmentation with a Statistical Shape Model
 Pathology Hinting as the Combination of Automatic Segmentation with a Statistical Shape Model Pascal A. Dufour 1,2, Hannan Abdillahi 3, Lala Ceklic 3, Ute Wolf-Schnurrbusch 2,3, and Jens Kowal 1,2 1 ARTORG
Pathology Hinting as the Combination of Automatic Segmentation with a Statistical Shape Model Pascal A. Dufour 1,2, Hannan Abdillahi 3, Lala Ceklic 3, Ute Wolf-Schnurrbusch 2,3, and Jens Kowal 1,2 1 ARTORG
Simultaneous Multiple Surface Segmentation Using Deep Learning
 Simultaneous Multiple Surface Segmentation Using Deep Learning Abhay Shah 1, Michael D. Abramoff 1,2 and Xiaodong Wu 1,3 Department of 1 Electrical and Computer Engineering, 2 Radiation Oncology, 3 Department
Simultaneous Multiple Surface Segmentation Using Deep Learning Abhay Shah 1, Michael D. Abramoff 1,2 and Xiaodong Wu 1,3 Department of 1 Electrical and Computer Engineering, 2 Radiation Oncology, 3 Department
Fuzzy C-means Clustering For Retinal Layer Segmentation On High Resolution OCT Images
 Fuzzy C-means Clustering For Retinal Layer Segmentation On High Resolution OCT Images Markus A. Mayer1,2, Ralf P. Tornow3, Joachim Hornegger1, Friedrich E. Kruse3 1 Chair of Pattern Recognition, 2 Graduate
Fuzzy C-means Clustering For Retinal Layer Segmentation On High Resolution OCT Images Markus A. Mayer1,2, Ralf P. Tornow3, Joachim Hornegger1, Friedrich E. Kruse3 1 Chair of Pattern Recognition, 2 Graduate
Vendor Independent Cyst Segmentation in Retinal SD-OCT Volumes using a Combination of Multiple Scale Convolutional Neural Networks
 Vendor Independent Cyst Segmentation in Retinal SD-OCT Volumes using a Combination of Multiple Scale Convolutional Neural Networks Freerk G. Venhuizen a, Mark J.J.P. van Grinsven a, Carel B. Hoyng b, Thomas
Vendor Independent Cyst Segmentation in Retinal SD-OCT Volumes using a Combination of Multiple Scale Convolutional Neural Networks Freerk G. Venhuizen a, Mark J.J.P. van Grinsven a, Carel B. Hoyng b, Thomas
Exploiting Typical Clinical Imaging Constraints for 3D Outer Bone Surface Segmentation
 Exploiting Typical Clinical Imaging Constraints for 3D Outer Bone Surface Segmentation Chris Mack, Vishali Mogallapu, Andrew Willis, Thomas P. Weldon UNC Charlotte, Department of Electrical and Computer
Exploiting Typical Clinical Imaging Constraints for 3D Outer Bone Surface Segmentation Chris Mack, Vishali Mogallapu, Andrew Willis, Thomas P. Weldon UNC Charlotte, Department of Electrical and Computer
Interactive Deformable Registration Visualization and Analysis of 4D Computed Tomography
 Interactive Deformable Registration Visualization and Analysis of 4D Computed Tomography Burak Erem 1, Gregory C. Sharp 2, Ziji Wu 2, and David Kaeli 1 1 Department of Electrical and Computer Engineering,
Interactive Deformable Registration Visualization and Analysis of 4D Computed Tomography Burak Erem 1, Gregory C. Sharp 2, Ziji Wu 2, and David Kaeli 1 1 Department of Electrical and Computer Engineering,
Globally Optimal Segmentation of Interacting Surfaces with Geometric Constraints
 Globally Optimal Segmentation of Interacting Surfaces with Geometric Constraints Kang Li, Xiaodong Wu, Danny Z. Chen and Milan Sonka Department of Electrical and Computer Engineering The University of
Globally Optimal Segmentation of Interacting Surfaces with Geometric Constraints Kang Li, Xiaodong Wu, Danny Z. Chen and Milan Sonka Department of Electrical and Computer Engineering The University of
Automated Vessel Shadow Segmentation of Fovea-centred Spectral-domain Images from Multiple OCT Devices
 Automated Vessel Shadow Segmentation of Fovea-centred Spectral-domain Images from Multiple OCT Devices Jing Wu a, Bianca S. Gerendas a, Sebastian M. Waldstein a, Christian Simader a and Ursula Schmidt-Erfurth
Automated Vessel Shadow Segmentation of Fovea-centred Spectral-domain Images from Multiple OCT Devices Jing Wu a, Bianca S. Gerendas a, Sebastian M. Waldstein a, Christian Simader a and Ursula Schmidt-Erfurth
Automated Segmentation of the Cup and Rim from Spectral Domain OCT of the Optic Nerve Head
 Automated Segmentation of the Cup and Rim from Spectral Domain OCT of the Optic Nerve Head Michael D. Abràmoff, 1,2,3 Kyungmoo Lee, 3,4 Meindert Niemeijer, 1,3 Wallace L. M. Alward, 1 Emily C. Greenlee,
Automated Segmentation of the Cup and Rim from Spectral Domain OCT of the Optic Nerve Head Michael D. Abràmoff, 1,2,3 Kyungmoo Lee, 3,4 Meindert Niemeijer, 1,3 Wallace L. M. Alward, 1 Emily C. Greenlee,
arxiv: v1 [cs.cv] 14 Mar 2018
![arxiv: v1 [cs.cv] 14 Mar 2018](/thumbs/82/85071776.jpg "arxiv: v1 [cs.cv] 14 Mar 2018") Topology guaranteed segmentation of the human retina from OCT using convolutional neural networks arxiv:1803.05120v1 [cs.cv] 14 Mar 2018 Yufan He 1, Aaron Carass 1,2, Bruno M. Jedynak 3, Sharon D. Solomon
Topology guaranteed segmentation of the human retina from OCT using convolutional neural networks arxiv:1803.05120v1 [cs.cv] 14 Mar 2018 Yufan He 1, Aaron Carass 1,2, Bruno M. Jedynak 3, Sharon D. Solomon
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 5540 Spring 2013 Assignment 3, v1.0 Due: Apr. 24th 11:59PM
 1 Introduction In this programming project, we are going to do a simple image segmentation task. Given a grayscale image with a bright object against a dark background and we are going to do a binary decision
1 Introduction In this programming project, we are going to do a simple image segmentation task. Given a grayscale image with a bright object against a dark background and we are going to do a binary decision
Retinal OCT Image Segmentation Using Fuzzy Histogram Hyperbolization and Continuous Max-Flow
 Retinal OCT Image Segmentation Using Fuzzy Histogram Hyperbolization and Continuous Max-Flow Bashir I. Dodo, Yongmin Li, and Xiaohui Liu Department Of Computer Science Brunel University Uxbridge, United
Retinal OCT Image Segmentation Using Fuzzy Histogram Hyperbolization and Continuous Max-Flow Bashir I. Dodo, Yongmin Li, and Xiaohui Liu Department Of Computer Science Brunel University Uxbridge, United
Image Registration. Prof. Dr. Lucas Ferrari de Oliveira UFPR Informatics Department
 Image Registration Prof. Dr. Lucas Ferrari de Oliveira UFPR Informatics Department Introduction Visualize objects inside the human body Advances in CS methods to diagnosis, treatment planning and medical
Image Registration Prof. Dr. Lucas Ferrari de Oliveira UFPR Informatics Department Introduction Visualize objects inside the human body Advances in CS methods to diagnosis, treatment planning and medical
Simultaneous Model-based Segmentation of Multiple Objects
 Simultaneous Model-based Segmentation of Multiple Objects Astrid Franz 1, Robin Wolz 1, Tobias Klinder 1,2, Cristian Lorenz 1, Hans Barschdorf 1, Thomas Blaffert 1, Sebastian P. M. Dries 1, Steffen Renisch
Simultaneous Model-based Segmentation of Multiple Objects Astrid Franz 1, Robin Wolz 1, Tobias Klinder 1,2, Cristian Lorenz 1, Hans Barschdorf 1, Thomas Blaffert 1, Sebastian P. M. Dries 1, Steffen Renisch
The Future of OCT? Swept Source. Todd J. Purkiss, MD, PhD River City Retina Club July 16, 2015
 The Future of OCT? Swept Source Todd J. Purkiss, MD, PhD River City Retina Club July 16, 2015 Background on OCT Optical Coherence Tomography Optical When a light wave meets the interface of two differing
The Future of OCT? Swept Source Todd J. Purkiss, MD, PhD River City Retina Club July 16, 2015 Background on OCT Optical Coherence Tomography Optical When a light wave meets the interface of two differing
Digital Volume Correlation for Materials Characterization
 19 th World Conference on Non-Destructive Testing 2016 Digital Volume Correlation for Materials Characterization Enrico QUINTANA, Phillip REU, Edward JIMENEZ, Kyle THOMPSON, Sharlotte KRAMER Sandia National
19 th World Conference on Non-Destructive Testing 2016 Digital Volume Correlation for Materials Characterization Enrico QUINTANA, Phillip REU, Edward JIMENEZ, Kyle THOMPSON, Sharlotte KRAMER Sandia National
Topology Preserving Tetrahedral Decomposition of Trilinear Cell
 Topology Preserving Tetrahedral Decomposition of Trilinear Cell Bong-Soo Sohn Department of Computer Engineering, Kyungpook National University Daegu 702-701, South Korea bongbong@knu.ac.kr http://bh.knu.ac.kr/
Topology Preserving Tetrahedral Decomposition of Trilinear Cell Bong-Soo Sohn Department of Computer Engineering, Kyungpook National University Daegu 702-701, South Korea bongbong@knu.ac.kr http://bh.knu.ac.kr/
Artificial Neural Network-Based Prediction of Human Posture
 Artificial Neural Network-Based Prediction of Human Posture Abstract The use of an artificial neural network (ANN) in many practical complicated problems encourages its implementation in the digital human
Artificial Neural Network-Based Prediction of Human Posture Abstract The use of an artificial neural network (ANN) in many practical complicated problems encourages its implementation in the digital human
Measuring Cubeness of 3D Shapes
 Measuring Cubeness of 3D Shapes Carlos Martinez-Ortiz and Joviša Žunić Department of Computer Science, University of Exeter, Exeter EX4 4QF, U.K. {cm265,j.zunic}@ex.ac.uk Abstract. In this paper we introduce
Measuring Cubeness of 3D Shapes Carlos Martinez-Ortiz and Joviša Žunić Department of Computer Science, University of Exeter, Exeter EX4 4QF, U.K. {cm265,j.zunic}@ex.ac.uk Abstract. In this paper we introduce
Real Time Object Visual Inspection Based On Template Matching Using FPGA
 Real Time Object Visual Inspection Based On Template Matching Using FPGA SANDHYA P Asst Professor in MTIET Palamaner, India OMKAR NAIDU V Asst Professor in MTIET Palamaner, India Abstract In similarity
Real Time Object Visual Inspection Based On Template Matching Using FPGA SANDHYA P Asst Professor in MTIET Palamaner, India OMKAR NAIDU V Asst Professor in MTIET Palamaner, India Abstract In similarity
WORCESTER POLYTECHNIC INSTITUTE
 WORCESTER POLYTECHNIC INSTITUTE MECHANICAL ENGINEERING DEPARTMENT Optical Metrology and NDT ME-593L, C 2018 Introduction: Wave Optics January 2018 Wave optics: coherence Temporal coherence Review interference
WORCESTER POLYTECHNIC INSTITUTE MECHANICAL ENGINEERING DEPARTMENT Optical Metrology and NDT ME-593L, C 2018 Introduction: Wave Optics January 2018 Wave optics: coherence Temporal coherence Review interference
Planar pattern for automatic camera calibration
 Planar pattern for automatic camera calibration Beiwei Zhang Y. F. Li City University of Hong Kong Department of Manufacturing Engineering and Engineering Management Kowloon, Hong Kong Fu-Chao Wu Institute
Planar pattern for automatic camera calibration Beiwei Zhang Y. F. Li City University of Hong Kong Department of Manufacturing Engineering and Engineering Management Kowloon, Hong Kong Fu-Chao Wu Institute
Structured System Theory
 Appendix C Structured System Theory Linear systems are often studied from an algebraic perspective, based on the rank of certain matrices. While such tests are easy to derive from the mathematical model,
Appendix C Structured System Theory Linear systems are often studied from an algebraic perspective, based on the rank of certain matrices. While such tests are easy to derive from the mathematical model,
IJSER. Real Time Object Visual Inspection Based On Template Matching Using FPGA
 International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 823 Real Time Object Visual Inspection Based On Template Matching Using FPGA GURURAJ.BANAKAR Electronics & Communications
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 823 Real Time Object Visual Inspection Based On Template Matching Using FPGA GURURAJ.BANAKAR Electronics & Communications
 Forward Problem Solution as the Operator of Filtered and Back Projection Matrix to Reconstruct the Various Method of Collecting Data and the Object Element in Electrical Impedance Tomography K. Ain 1,3,
Forward Problem Solution as the Operator of Filtered and Back Projection Matrix to Reconstruct the Various Method of Collecting Data and the Object Element in Electrical Impedance Tomography K. Ain 1,3,
IMPLEMENTATION OF THE CONTRAST ENHANCEMENT AND WEIGHTED GUIDED IMAGE FILTERING ALGORITHM FOR EDGE PRESERVATION FOR BETTER PERCEPTION
 IMPLEMENTATION OF THE CONTRAST ENHANCEMENT AND WEIGHTED GUIDED IMAGE FILTERING ALGORITHM FOR EDGE PRESERVATION FOR BETTER PERCEPTION Chiruvella Suresh Assistant professor, Department of Electronics & Communication
IMPLEMENTATION OF THE CONTRAST ENHANCEMENT AND WEIGHTED GUIDED IMAGE FILTERING ALGORITHM FOR EDGE PRESERVATION FOR BETTER PERCEPTION Chiruvella Suresh Assistant professor, Department of Electronics & Communication
A REVIEW ON IMAGE RETRIEVAL USING HYPERGRAPH
 A REVIEW ON IMAGE RETRIEVAL USING HYPERGRAPH Sandhya V. Kawale Prof. Dr. S. M. Kamalapur M.E. Student Associate Professor Deparment of Computer Engineering, Deparment of Computer Engineering, K. K. Wagh
A REVIEW ON IMAGE RETRIEVAL USING HYPERGRAPH Sandhya V. Kawale Prof. Dr. S. M. Kamalapur M.E. Student Associate Professor Deparment of Computer Engineering, Deparment of Computer Engineering, K. K. Wagh
Fingerprint Presentation Attack Detection with OCT
 Fingerprint Presentation Attack Detection with OCT Ctirad Sousedik ctirad.sousedik@hig.no Ralph Breithaupt - ralph.breithaupt@bsi.bund.de Christoph Busch christoph.busch@hig.no 111111111 Outline Motivation
Fingerprint Presentation Attack Detection with OCT Ctirad Sousedik ctirad.sousedik@hig.no Ralph Breithaupt - ralph.breithaupt@bsi.bund.de Christoph Busch christoph.busch@hig.no 111111111 Outline Motivation
A multimodal machine-learning graph-based approach for segmenting glaucomatous optic nerve head structures from SD-OCT volumes and fundus photographs
 University of Iowa Iowa Research Online Theses and Dissertations Spring 2016 A multimodal machine-learning graph-based approach for segmenting glaucomatous optic nerve head structures from SD-OCT volumes
University of Iowa Iowa Research Online Theses and Dissertations Spring 2016 A multimodal machine-learning graph-based approach for segmenting glaucomatous optic nerve head structures from SD-OCT volumes
CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation
 CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation II - 1 Outlines What is Graph cuts Graph-based clustering
CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation II - 1 Outlines What is Graph cuts Graph-based clustering
Multi-object Segmentation with Coupled Deformable Models
 KAINMUELLER, LAMECKER, ZACHOW: MULTI-OBJECT SEGMENTATION 1 Multi-object Segmentation with Coupled Deformable Models Dagmar Kainmueller, Hans Lamecker, Stefan Zachow Zuse Institute Berlin, Takustr. 7, 14195
KAINMUELLER, LAMECKER, ZACHOW: MULTI-OBJECT SEGMENTATION 1 Multi-object Segmentation with Coupled Deformable Models Dagmar Kainmueller, Hans Lamecker, Stefan Zachow Zuse Institute Berlin, Takustr. 7, 14195
Display. Introduction page 67 2D Images page 68. All Orientations page 69 Single Image page 70 3D Images page 71
 Display Introduction page 67 2D Images page 68 All Orientations page 69 Single Image page 70 3D Images page 71 Intersecting Sections page 71 Cube Sections page 72 Render page 73 1. Tissue Maps page 77
Display Introduction page 67 2D Images page 68 All Orientations page 69 Single Image page 70 3D Images page 71 Intersecting Sections page 71 Cube Sections page 72 Render page 73 1. Tissue Maps page 77
Voxelization in Common Sampling Lattices
 Voxelization in Common Sampling Lattices Haris Widjaya htw@cs.sfu.ca Torsten Möller torsten@cs.sfu.ca Alireza Entezari aentezar@cs.sfu.ca Abstract In this paper we introduce algorithms to voxelize polygonal
Voxelization in Common Sampling Lattices Haris Widjaya htw@cs.sfu.ca Torsten Möller torsten@cs.sfu.ca Alireza Entezari aentezar@cs.sfu.ca Abstract In this paper we introduce algorithms to voxelize polygonal
Determination of the Minimum Break Point Set of Directional Relay Networks based on k-trees of the Network Graphs
 IEEE TPWRD 2011. THIS IS THE AUTHORS COPY. THE DEFINITIVE VERSION CAN BE FOUND AT IEEE. 1 Determination of the Minimum Break Point Set of Directional Relay Networks based on k-trees of the Network Graphs
IEEE TPWRD 2011. THIS IS THE AUTHORS COPY. THE DEFINITIVE VERSION CAN BE FOUND AT IEEE. 1 Determination of the Minimum Break Point Set of Directional Relay Networks based on k-trees of the Network Graphs
Surface-based Analysis: Inter-subject Registration and Smoothing
 Surface-based Analysis: Inter-subject Registration and Smoothing Outline Exploratory Spatial Analysis Coordinate Systems 3D (Volumetric) 2D (Surface-based) Inter-subject registration Volume-based Surface-based
Surface-based Analysis: Inter-subject Registration and Smoothing Outline Exploratory Spatial Analysis Coordinate Systems 3D (Volumetric) 2D (Surface-based) Inter-subject registration Volume-based Surface-based
Hybrid Stegnography using ImagesVaried PVD+ LSB Detection Program
 www.ijecs.in International Journal Of Engineering And Computer Science ISSN:2319-7242 Volume 4 Issue 5 May 2015, Page No. 12086-12090 Hybrid Stegnography using ImagesVaried PVD+ LSB Detection Program Shruti
www.ijecs.in International Journal Of Engineering And Computer Science ISSN:2319-7242 Volume 4 Issue 5 May 2015, Page No. 12086-12090 Hybrid Stegnography using ImagesVaried PVD+ LSB Detection Program Shruti
Reconstruction of complete 3D object model from multi-view range images.
 Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Robust Realignment of fmri Time Series Data
 Robust Realignment of fmri Time Series Data Ben Dodson bjdodson@stanford.edu Olafur Gudmundsson olafurg@stanford.edu December 12, 2008 Abstract FMRI data has become an increasingly popular source for exploring
Robust Realignment of fmri Time Series Data Ben Dodson bjdodson@stanford.edu Olafur Gudmundsson olafurg@stanford.edu December 12, 2008 Abstract FMRI data has become an increasingly popular source for exploring
A MORPHOLOGY-BASED FILTER STRUCTURE FOR EDGE-ENHANCING SMOOTHING
 Proceedings of the 1994 IEEE International Conference on Image Processing (ICIP-94), pp. 530-534. (Austin, Texas, 13-16 November 1994.) A MORPHOLOGY-BASED FILTER STRUCTURE FOR EDGE-ENHANCING SMOOTHING
Proceedings of the 1994 IEEE International Conference on Image Processing (ICIP-94), pp. 530-534. (Austin, Texas, 13-16 November 1994.) A MORPHOLOGY-BASED FILTER STRUCTURE FOR EDGE-ENHANCING SMOOTHING
Multi-surface, multi-object optimal image segmentation: application in 3D knee joint imaged by MR
 University of Iowa Iowa Research Online Theses and Dissertations Summer 2010 Multi-surface, multi-object optimal image segmentation: application in 3D knee joint imaged by MR Yin Yin University of Iowa
University of Iowa Iowa Research Online Theses and Dissertations Summer 2010 Multi-surface, multi-object optimal image segmentation: application in 3D knee joint imaged by MR Yin Yin University of Iowa
Semantic Context Forests for Learning- Based Knee Cartilage Segmentation in 3D MR Images
 Semantic Context Forests for Learning- Based Knee Cartilage Segmentation in 3D MR Images MICCAI 2013: Workshop on Medical Computer Vision Authors: Quan Wang, Dijia Wu, Le Lu, Meizhu Liu, Kim L. Boyer,
Semantic Context Forests for Learning- Based Knee Cartilage Segmentation in 3D MR Images MICCAI 2013: Workshop on Medical Computer Vision Authors: Quan Wang, Dijia Wu, Le Lu, Meizhu Liu, Kim L. Boyer,
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Lecture 10 Segmentation, Part II (ch 8) Active Contours (Snakes) ch. 8 of Machine Vision by Wesley E. Snyder & Hairong Qi
 Active Contours (Snakes) ch. 8 of Machine Vision by Wesley E. Snyder & Hairong Qi") Lecture 10 Segmentation, Part II (ch 8) Active Contours (Snakes) ch. 8 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of
Lecture 10 Segmentation, Part II (ch 8) Active Contours (Snakes) ch. 8 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of
Image Segmentation Using FELICM Clustering Method
 RESEARCH ARTICLE OPEN ACCESS Image Segmentation Using FELICM Clustering Method Ramya, Jemimah Simon R.S.Ramya1 pursuing M.E in Vins Christian College of Engineering, e-mail: ramyasanthi7@gmail.com Jemimah
RESEARCH ARTICLE OPEN ACCESS Image Segmentation Using FELICM Clustering Method Ramya, Jemimah Simon R.S.Ramya1 pursuing M.E in Vins Christian College of Engineering, e-mail: ramyasanthi7@gmail.com Jemimah
Region Segmentation for Facial Image Compression
 Region Segmentation for Facial Image Compression Alexander Tropf and Douglas Chai Visual Information Processing Research Group School of Engineering and Mathematics, Edith Cowan University Perth, Australia
Region Segmentation for Facial Image Compression Alexander Tropf and Douglas Chai Visual Information Processing Research Group School of Engineering and Mathematics, Edith Cowan University Perth, Australia
Linear Regression Model on Multiresolution Analysis for Texture Classification
 Linear Regression Model on Multiresolution Analysis for Texture Classification A.Subha M.E Applied Electronics Student Anna University Tirunelveli Tirunelveli S.Lenty Stuwart Lecturer, ECE Department Anna
Linear Regression Model on Multiresolution Analysis for Texture Classification A.Subha M.E Applied Electronics Student Anna University Tirunelveli Tirunelveli S.Lenty Stuwart Lecturer, ECE Department Anna
A Novel Real-Time Feature Matching Scheme
 Sensors & Transducers, Vol. 165, Issue, February 01, pp. 17-11 Sensors & Transducers 01 by IFSA Publishing, S. L. http://www.sensorsportal.com A Novel Real-Time Feature Matching Scheme Ying Liu, * Hongbo
Sensors & Transducers, Vol. 165, Issue, February 01, pp. 17-11 Sensors & Transducers 01 by IFSA Publishing, S. L. http://www.sensorsportal.com A Novel Real-Time Feature Matching Scheme Ying Liu, * Hongbo
Agenda. Perspective projection. Rotations. Camera models
 Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
You may refer to the lesson on data structures (Introduction to Data Structures) as necessary.
 as necessary.") The Science of Computing I Living with Cyber Raspberry Pi Activity 4: Arraynging Things In this activity, you will implement the insertion sort. You will need the following items: Raspberry Pi B v2 with
The Science of Computing I Living with Cyber Raspberry Pi Activity 4: Arraynging Things In this activity, you will implement the insertion sort. You will need the following items: Raspberry Pi B v2 with
A Modified Image Segmentation Method Using Active Contour Model
 nd International Conference on Electrical, Computer Engineering and Electronics (ICECEE 015) A Modified Image Segmentation Method Using Active Contour Model Shiping Zhu 1, a, Ruidong Gao 1, b 1 Department
nd International Conference on Electrical, Computer Engineering and Electronics (ICECEE 015) A Modified Image Segmentation Method Using Active Contour Model Shiping Zhu 1, a, Ruidong Gao 1, b 1 Department
RESTORING ARTIFACT-FREE MICROSCOPY IMAGE SEQUENCES. Robotics Institute Carnegie Mellon University 5000 Forbes Ave, Pittsburgh, PA 15213, USA
 RESTORING ARTIFACT-FREE MICROSCOPY IMAGE SEQUENCES Zhaozheng Yin Takeo Kanade Robotics Institute Carnegie Mellon University 5000 Forbes Ave, Pittsburgh, PA 15213, USA ABSTRACT Phase contrast and differential
RESTORING ARTIFACT-FREE MICROSCOPY IMAGE SEQUENCES Zhaozheng Yin Takeo Kanade Robotics Institute Carnegie Mellon University 5000 Forbes Ave, Pittsburgh, PA 15213, USA ABSTRACT Phase contrast and differential
Depth Estimation of Light Field Images by Optical Flow
 Depth Estimation of Light Field Images by Optical Flow Marcus an mpanj@stanford.edu Abstract Light field images present a rich, compact, dataset of multiple images of a from slightly shifted viewpoints.
Depth Estimation of Light Field Images by Optical Flow Marcus an mpanj@stanford.edu Abstract Light field images present a rich, compact, dataset of multiple images of a from slightly shifted viewpoints.
A Fourier Extension Based Algorithm for Impulse Noise Removal
 A Fourier Extension Based Algorithm for Impulse Noise Removal H. Sahoolizadeh, R. Rajabioun *, M. Zeinali Abstract In this paper a novel Fourier extension based algorithm is introduced which is able to
A Fourier Extension Based Algorithm for Impulse Noise Removal H. Sahoolizadeh, R. Rajabioun *, M. Zeinali Abstract In this paper a novel Fourier extension based algorithm is introduced which is able to
Three-dimensional continuous max flow optimization-based serous retinal detachment segmentation in SD-OCT for central serous chorioretinopathy
 Vol. 8, No. 9 1 Sep 2017 BIOMEDICAL OPTICS EXPRESS 4257 Three-dimensional continuous max flow optimization-based serous retinal detachment segmentation in SD-OCT for central serous chorioretinopathy MENGLIN
Vol. 8, No. 9 1 Sep 2017 BIOMEDICAL OPTICS EXPRESS 4257 Three-dimensional continuous max flow optimization-based serous retinal detachment segmentation in SD-OCT for central serous chorioretinopathy MENGLIN
Performance Assessment of DMOEA-DD with CEC 2009 MOEA Competition Test Instances
 Performance Assessment of DMOEA-DD with CEC 2009 MOEA Competition Test Instances Minzhong Liu, Xiufen Zou, Yu Chen, Zhijian Wu Abstract In this paper, the DMOEA-DD, which is an improvement of DMOEA[1,
Performance Assessment of DMOEA-DD with CEC 2009 MOEA Competition Test Instances Minzhong Liu, Xiufen Zou, Yu Chen, Zhijian Wu Abstract In this paper, the DMOEA-DD, which is an improvement of DMOEA[1,
Intra-retinal layer segmentation in optical coherence tomography images
 Intra-retinal layer segmentation in optical coherence tomography images Akshaya Mishra 1, Alexander Wong 1 *, Kostadinka Bizheva 2, David A. Clausi 1 1 Dept. of Systems Design Engineering, University of
Intra-retinal layer segmentation in optical coherence tomography images Akshaya Mishra 1, Alexander Wong 1 *, Kostadinka Bizheva 2, David A. Clausi 1 1 Dept. of Systems Design Engineering, University of
An Approach for Real Time Moving Object Extraction based on Edge Region Determination
 An Approach for Real Time Moving Object Extraction based on Edge Region Determination Sabrina Hoque Tuli Department of Computer Science and Engineering, Chittagong University of Engineering and Technology,
An Approach for Real Time Moving Object Extraction based on Edge Region Determination Sabrina Hoque Tuli Department of Computer Science and Engineering, Chittagong University of Engineering and Technology,
INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY
 INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY A PATH FOR HORIZING YOUR INNOVATIVE WORK IMAGE COMPRESSION USING VLSI APPLICATION OF DISCRETE WAVELET TRANSFORM (DWT) AMIT
INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY A PATH FOR HORIZING YOUR INNOVATIVE WORK IMAGE COMPRESSION USING VLSI APPLICATION OF DISCRETE WAVELET TRANSFORM (DWT) AMIT
OCTExplorer User Manual
 OCTExplorer 3.8.0 User Manual 09/08/2017 Kyungmoo Lee, Michael D. Abràmoff, Andreas Wahle, Mona K. Garvin, Milan Sonka Retinal Image Analysis Laboratory, The University of Iowa The University of Iowa,
OCTExplorer 3.8.0 User Manual 09/08/2017 Kyungmoo Lee, Michael D. Abràmoff, Andreas Wahle, Mona K. Garvin, Milan Sonka Retinal Image Analysis Laboratory, The University of Iowa The University of Iowa,
AN EXAMINING FACE RECOGNITION BY LOCAL DIRECTIONAL NUMBER PATTERN (Image Processing)
") AN EXAMINING FACE RECOGNITION BY LOCAL DIRECTIONAL NUMBER PATTERN (Image Processing) J.Nithya 1, P.Sathyasutha2 1,2 Assistant Professor,Gnanamani College of Engineering, Namakkal, Tamil Nadu, India ABSTRACT
AN EXAMINING FACE RECOGNITION BY LOCAL DIRECTIONAL NUMBER PATTERN (Image Processing) J.Nithya 1, P.Sathyasutha2 1,2 Assistant Professor,Gnanamani College of Engineering, Namakkal, Tamil Nadu, India ABSTRACT
Unit 2: Data Storage CS 101, Fall 2018
 Unit 2: Data Storage CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Evaluate digital circuits that use AND, OR, XOR, and NOT. Convert binary integers to/from decimal,
Unit 2: Data Storage CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Evaluate digital circuits that use AND, OR, XOR, and NOT. Convert binary integers to/from decimal,
The Lucas & Kanade Algorithm
 The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
Navigation System for ACL Reconstruction Using Registration between Multi-Viewpoint X-ray Images and CT Images
 Navigation System for ACL Reconstruction Using Registration between Multi-Viewpoint X-ray Images and CT Images Mamoru Kuga a*, Kazunori Yasuda b, Nobuhiko Hata a, Takeyoshi Dohi a a Graduate School of
Navigation System for ACL Reconstruction Using Registration between Multi-Viewpoint X-ray Images and CT Images Mamoru Kuga a*, Kazunori Yasuda b, Nobuhiko Hata a, Takeyoshi Dohi a a Graduate School of
An Algorithm for Calculating Objects Shape Features in Binary Images
 2017 2 nd International Conference on Artificial Intelligence and Engineering Applications (AIEA 2017) ISBN: 978-1-60595-485-1 An Algorithm for Calculating Objects Shape Features in Binary Images LIFENG
2017 2 nd International Conference on Artificial Intelligence and Engineering Applications (AIEA 2017) ISBN: 978-1-60595-485-1 An Algorithm for Calculating Objects Shape Features in Binary Images LIFENG
Introduction to Digital Image Processing
 Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES
 GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES Karl W. Ulmer and John P. Basart Center for Nondestructive Evaluation Department of Electrical and Computer Engineering Iowa State University
GENERAL AUTOMATED FLAW DETECTION SCHEME FOR NDE X-RAY IMAGES Karl W. Ulmer and John P. Basart Center for Nondestructive Evaluation Department of Electrical and Computer Engineering Iowa State University
CSE 167: Lecture #7: Color and Shading. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011
 CSE 167: Introduction to Computer Graphics Lecture #7: Color and Shading Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday,
CSE 167: Introduction to Computer Graphics Lecture #7: Color and Shading Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday,
Subnetting Study Guide
 Subnetting Study Guide Boson TCP/IP Cheat Sheet by Boson Software, LLC An octet is a binary number of 8 bits, with the lowest possible number being 00000000 and the highest possible number being 11111111,
Subnetting Study Guide Boson TCP/IP Cheat Sheet by Boson Software, LLC An octet is a binary number of 8 bits, with the lowest possible number being 00000000 and the highest possible number being 11111111,
An Efficient Tag Identification Algorithm Based on Improved Collision Detection
 An Efficient Tag Identification Algorithm Based on Improved Collision Detection Ya-Ning Yan 1 and Jian Xiong 2 1. ZTE Telecommunications College, Xi an Peihua University, Xi an 710065, China 2. School
An Efficient Tag Identification Algorithm Based on Improved Collision Detection Ya-Ning Yan 1 and Jian Xiong 2 1. ZTE Telecommunications College, Xi an Peihua University, Xi an 710065, China 2. School
Filters + linear algebra
 Filters + linear algebra Outline Efficiency (pyramids, separability, steerability) Linear algebra Bag-of-words Recall: Canny Derivative-of-Gaussian = Gaussian * [1-1] Ideal image +noise filtered Fundamental
Filters + linear algebra Outline Efficiency (pyramids, separability, steerability) Linear algebra Bag-of-words Recall: Canny Derivative-of-Gaussian = Gaussian * [1-1] Ideal image +noise filtered Fundamental
Line, edge, blob and corner detection
 Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
60-265: Winter ANSWERS Exercise 4 Combinational Circuit Design
 60-265: Winter 2010 Computer Architecture I: Digital Design ANSWERS Exercise 4 Combinational Circuit Design Question 1. One-bit Comparator [ 1 mark ] Consider two 1-bit inputs, A and B. If we assume that
60-265: Winter 2010 Computer Architecture I: Digital Design ANSWERS Exercise 4 Combinational Circuit Design Question 1. One-bit Comparator [ 1 mark ] Consider two 1-bit inputs, A and B. If we assume that
A Study on Similarity Computations in Template Matching Technique for Identity Verification
 A Study on Similarity Computations in Template Matching Technique for Identity Verification Lam, S. K., Yeong, C. Y., Yew, C. T., Chai, W. S., Suandi, S. A. Intelligent Biometric Group, School of Electrical
A Study on Similarity Computations in Template Matching Technique for Identity Verification Lam, S. K., Yeong, C. Y., Yew, C. T., Chai, W. S., Suandi, S. A. Intelligent Biometric Group, School of Electrical
A Robust Method for Circle / Ellipse Extraction Based Canny Edge Detection
 International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 5, May 2015, PP 49-57 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) A Robust Method for Circle / Ellipse
International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 5, May 2015, PP 49-57 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) A Robust Method for Circle / Ellipse
A Non-Linear Image Registration Scheme for Real-Time Liver Ultrasound Tracking using Normalized Gradient Fields
 A Non-Linear Image Registration Scheme for Real-Time Liver Ultrasound Tracking using Normalized Gradient Fields Lars König, Till Kipshagen and Jan Rühaak Fraunhofer MEVIS Project Group Image Registration,
A Non-Linear Image Registration Scheme for Real-Time Liver Ultrasound Tracking using Normalized Gradient Fields Lars König, Till Kipshagen and Jan Rühaak Fraunhofer MEVIS Project Group Image Registration,
MRF Based LSB Steganalysis: A New Measure of Steganography Capacity
 MRF Based LSB Steganalysis: A New Measure of Steganography Capacity Debasis Mazumdar 1, Apurba Das 1, and Sankar K. Pal 2 1 CDAC, Kolkata, Salt Lake Electronics Complex, Kolkata, India {debasis.mazumdar,apurba.das}@cdackolkata.in
MRF Based LSB Steganalysis: A New Measure of Steganography Capacity Debasis Mazumdar 1, Apurba Das 1, and Sankar K. Pal 2 1 CDAC, Kolkata, Salt Lake Electronics Complex, Kolkata, India {debasis.mazumdar,apurba.das}@cdackolkata.in
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference
 Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Automatic Mouth Localization Using Edge Projection
 Journal of Computer Science 6 (7): 679-683, 2010 ISSN 1549-3636 2010 Science Publications Automatic Mouth Localization Using Edge Projection Mohamed izon Department of Biomedical Technology, King Saud
Journal of Computer Science 6 (7): 679-683, 2010 ISSN 1549-3636 2010 Science Publications Automatic Mouth Localization Using Edge Projection Mohamed izon Department of Biomedical Technology, King Saud
VLSI Implementation of Barrel Distortion Correction in Endoscopic Images based on Least Squares Estimation
 VLSI Implementation of Barrel Distortion Correction in Endoscopic Images based on Least Squares Estimation R. Sathya Vignesh & S. Saranyadevi Abstract - An efficient VLSI Implementation of Barrel Distortion
VLSI Implementation of Barrel Distortion Correction in Endoscopic Images based on Least Squares Estimation R. Sathya Vignesh & S. Saranyadevi Abstract - An efficient VLSI Implementation of Barrel Distortion
arxiv: v1 [cs.cv] 4 Dec 2017
![arxiv: v1 [cs.cv] 4 Dec 2017](/thumbs/94/118262871.jpg "arxiv: v1 [cs.cv] 4 Dec 2017") A Generalized Motion Pattern and FCN based approach for retinal fluid detection and segmentation Shivin Yadav,Karthik Gopinath,Jayanthi Sivaswamy arxiv:1712.01073v1 [cs.cv] 4 Dec 2017 IIIT Hyderabad,Hyderabad,India
A Generalized Motion Pattern and FCN based approach for retinal fluid detection and segmentation Shivin Yadav,Karthik Gopinath,Jayanthi Sivaswamy arxiv:1712.01073v1 [cs.cv] 4 Dec 2017 IIIT Hyderabad,Hyderabad,India
DOCUMENT CLUSTERING USING HIERARCHICAL METHODS. 1. Dr.R.V.Krishnaiah 2. Katta Sharath Kumar. 3. P.Praveen Kumar. achieved.
 DOCUMENT CLUSTERING USING HIERARCHICAL METHODS 1. Dr.R.V.Krishnaiah 2. Katta Sharath Kumar 3. P.Praveen Kumar ABSTRACT: Cluster is a term used regularly in our life is nothing but a group. In the view
DOCUMENT CLUSTERING USING HIERARCHICAL METHODS 1. Dr.R.V.Krishnaiah 2. Katta Sharath Kumar 3. P.Praveen Kumar ABSTRACT: Cluster is a term used regularly in our life is nothing but a group. In the view
Texture Sensitive Image Inpainting after Object Morphing
 Texture Sensitive Image Inpainting after Object Morphing Yin Chieh Liu and Yi-Leh Wu Department of Computer Science and Information Engineering National Taiwan University of Science and Technology, Taiwan
Texture Sensitive Image Inpainting after Object Morphing Yin Chieh Liu and Yi-Leh Wu Department of Computer Science and Information Engineering National Taiwan University of Science and Technology, Taiwan
Massachusetts Institute of Technology. Department of Computer Science and Electrical Engineering /6.866 Machine Vision Quiz I
 Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision Quiz I Handed out: 2004 Oct. 21st Due on: 2003 Oct. 28th Problem 1: Uniform reflecting
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision Quiz I Handed out: 2004 Oct. 21st Due on: 2003 Oct. 28th Problem 1: Uniform reflecting
Content Based Image Retrieval Using Color Quantizes, EDBTC and LBP Features
 Content Based Image Retrieval Using Color Quantizes, EDBTC and LBP Features 1 Kum Sharanamma, 2 Krishnapriya Sharma 1,2 SIR MVIT Abstract- To describe the image features the Local binary pattern (LBP)
Content Based Image Retrieval Using Color Quantizes, EDBTC and LBP Features 1 Kum Sharanamma, 2 Krishnapriya Sharma 1,2 SIR MVIT Abstract- To describe the image features the Local binary pattern (LBP)
Nearly automatic vessels segmentation using graph-based energy minimization
 Nearly automatic vessels segmentation using graph-based energy minimization Release 1.00 M. Freiman 1, J. Frank 1, L. Weizman 1 E. Nammer 2, O. Shilon 2,, L. Joskowicz 1 and J. Sosna 3 July 16, 2009 1
Nearly automatic vessels segmentation using graph-based energy minimization Release 1.00 M. Freiman 1, J. Frank 1, L. Weizman 1 E. Nammer 2, O. Shilon 2,, L. Joskowicz 1 and J. Sosna 3 July 16, 2009 1
Automatic montage of SD-OCT data sets
 Automatic montage of SD-OCT data sets Ying Li, Giovanni Gregori,* Byron L. Lam, and Philip J. Rosenfeld Department of Ophthalmology, Bascom Palmer Eye Institute, University of Miami Miller School of Medicine,
Automatic montage of SD-OCT data sets Ying Li, Giovanni Gregori,* Byron L. Lam, and Philip J. Rosenfeld Department of Ophthalmology, Bascom Palmer Eye Institute, University of Miami Miller School of Medicine,
Joint Inference in Image Databases via Dense Correspondence. Michael Rubinstein MIT CSAIL (while interning at Microsoft Research)
") Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
XYZ. Register File. right/left. shifter. add/sub +/- en shift en +/-
 Microcode The datapath below incorporates an adder/subtractor and a one bit shifter. The arithmetic operation is specied by the add=sub control line. The subtraction is X -Y.The shift direction is controlled
Microcode The datapath below incorporates an adder/subtractor and a one bit shifter. The arithmetic operation is specied by the add=sub control line. The subtraction is X -Y.The shift direction is controlled
Collaborative Multi Organ Segmentation by Integrating Deformable and Graphical Models
 Collaborative Multi Organ Segmentation by Integrating Deformable and Graphical Models Mustafa Gökhan Uzunbaş 1, Chao Chen 1, Shaoting Zhang 1, Kilian M. Pohl 2, Kang Li 3, and Dimitris Metaxas 1 1 CBIM,
Collaborative Multi Organ Segmentation by Integrating Deformable and Graphical Models Mustafa Gökhan Uzunbaş 1, Chao Chen 1, Shaoting Zhang 1, Kilian M. Pohl 2, Kang Li 3, and Dimitris Metaxas 1 1 CBIM,
Alternative Statistical Methods for Bone Atlas Modelling
 Alternative Statistical Methods for Bone Atlas Modelling Sharmishtaa Seshamani, Gouthami Chintalapani, Russell Taylor Department of Computer Science, Johns Hopkins University, Baltimore, MD Traditional
Alternative Statistical Methods for Bone Atlas Modelling Sharmishtaa Seshamani, Gouthami Chintalapani, Russell Taylor Department of Computer Science, Johns Hopkins University, Baltimore, MD Traditional
Published by: PIONEER RESEARCH & DEVELOPMENT GROUP (www.prdg.org) 1
 1") Minutiae Points Extraction using Biometric Fingerprint- Enhancement Vishal Wagh 1, Shefali Sonavane 2 1 Computer Science and Engineering Department, Walchand College of Engineering, Sangli, Maharashtra-416415,
Minutiae Points Extraction using Biometric Fingerprint- Enhancement Vishal Wagh 1, Shefali Sonavane 2 1 Computer Science and Engineering Department, Walchand College of Engineering, Sangli, Maharashtra-416415,
Monochromatic Tree Partition for Complete. Multipartite Graphs
 Int. J. Contemp. Math. Sciences, Vol. 6, 2011, no. 43, 2129-2134 Monochromatic Tree Partition for Complete Multipartite Graphs Shili Wen and Peipei Zhu Department of Mathematics Zhejiang Normal University
Int. J. Contemp. Math. Sciences, Vol. 6, 2011, no. 43, 2129-2134 Monochromatic Tree Partition for Complete Multipartite Graphs Shili Wen and Peipei Zhu Department of Mathematics Zhejiang Normal University
Denoising and Edge Detection Using Sobelmethod
 International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Denoising and Edge Detection Using Sobelmethod P. Sravya 1, T. Rupa devi 2, M. Janardhana Rao 3, K. Sai Jagadeesh 4, K. Prasanna
International OPEN ACCESS Journal Of Modern Engineering Research (IJMER) Denoising and Edge Detection Using Sobelmethod P. Sravya 1, T. Rupa devi 2, M. Janardhana Rao 3, K. Sai Jagadeesh 4, K. Prasanna
CS228 - Basic Counting and the Pigeonhole Principle
 CS228 - Basic Counting and the Pigeonhole Principle Nathan Sprague February 19, 2014 Material in these slides is from Discrete Mathematics and Its Applications 7e, Kenneth Rosen, 2012. The Product Rule
CS228 - Basic Counting and the Pigeonhole Principle Nathan Sprague February 19, 2014 Material in these slides is from Discrete Mathematics and Its Applications 7e, Kenneth Rosen, 2012. The Product Rule
A new approach to reference point location in fingerprint recognition
 A new approach to reference point location in fingerprint recognition Piotr Porwik a) and Lukasz Wieclaw b) Institute of Informatics, Silesian University 41 200 Sosnowiec ul. Bedzinska 39, Poland a) porwik@us.edu.pl
A new approach to reference point location in fingerprint recognition Piotr Porwik a) and Lukasz Wieclaw b) Institute of Informatics, Silesian University 41 200 Sosnowiec ul. Bedzinska 39, Poland a) porwik@us.edu.pl
MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION OF TEXTURES
 International Journal of Computer Science and Communication Vol. 3, No. 1, January-June 2012, pp. 125-130 MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION
International Journal of Computer Science and Communication Vol. 3, No. 1, January-June 2012, pp. 125-130 MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION