Comparative Study of Isomorphism Detection of Kinematic Chains
|
|
|
- Esmond Martin
- 5 years ago
- Views:
Transcription
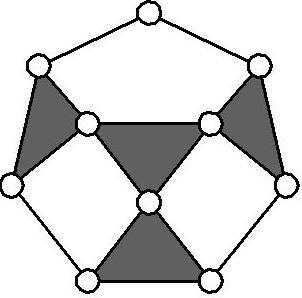
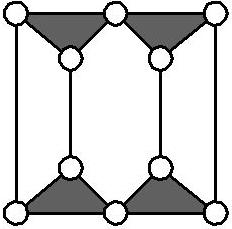
1 Comparative Study of Isomorphism Detection of Kinematic Chains Preetam Joshi 1, Vinayak Chimbre 2, Vinayak Kallannavar 3, Dr. Anil Shirahatti 4 1, 2 Students, Jain College of Engineering, Belagavi 3 Assistant Professor, Jain College of Engineering, Belagavi 4 Professor, Jain College of Engineering, Belagavi Abstract: one of the most essential and challenging step in the structural synthesis of any kinematic chain is to detect the possible structural isomorphism to avoid the repetitive work. Over past few decades many researchers reported different techniques to identify the isomorphism of different kinematic chains. In this study, an attempt has been made to compare few of these methods by considering different kinematic chains. It was observed that results obtained from these methods do not concur for all the kinematic chain inversions. Keywords: Kinematic chain, Inversion, Least path matrix, Isomorphism I. INTRODUCTION One of the most important aspects of structural synthesis is to identify all the possible unique arrangements of kinematic chains for a specific number of links, joints and degrees of freedom, so that the most efficient and optimum mechanism can be obtained. In this course of development of kinematic chains and mechanisms, the major problem will be to identify the possible isomorphism. An undetected isomorphism chain may lead to duplication and unnecessary effort. To avoid this, many researchers have proposed different methods to detect the isomorphism of kinematic chains. Ambekar et al. [1,2] established a method to check the isomorphism of kinematic chain pair by their canonical coding of corresponding adjacent matrices. Although many researchers [3-5] have worked to improve and modify, this method appears to be less efficient [6]. Rao et al. [7,8] introduced the conception of hamming distances to study kinematic structures. Woo [9] introduced algorithm based approach to understand isomorphism of kinematic chains. Chang et al. [10] proposed the new technique to detect isomorphism of kinematic chains by using the concept of eigen value and eigen vector. Mruthyunjaya [11] proposed a new method of binary coding for structural synthesis of kinematic chains. Yadav et al. [12] used link distance, Kong et al. [13] used artificial neural network and Quist et al. [14] used loop method to detect the isomorphism. Most of these methods have their own short comings. Hence, in this paper an attempt has been made to compare the kinematic chain isomorphism identification results of adjacent matrices method (i.e. Eigen value and Eigen vector approach), least path matrices method, and fuzzy similarity index method. II. THEORY A. Procedure To Identify Isomorphism of Two Kinematic Chains Using Adjacent Matrices Method 1) Generate adjacent matrices for both the kinematic chains, say A and B. 2) Calculate eigen values and eigen vectors for both the adjacent matrices. 3) Compare the eigen values of adjacent matrices. If the corresponding eigen values are equal, proceed to next step, else the kinematic chains are non-isomorphic. 4) If the corresponding eigen vectors of both adjacent matrices obtained are equal then proceed to next step, else the kinematic chains are non-isomorphic. 5) Compute row transformation matrix T based on matching eigen vector rows. If TAT -1 = B then the kinematic chain is isomorphic. Fig. 1 shows two inversions of 8 bar kinematic chain mechanisms (6-binary and 2-ternary). Adjacent Matrices Method was used to check the isomorphism of these two kinematic chains. 2638
 kinematic chains The adjacent matrices for the two chains is noted as A and B respectively as shown below: Eigen values and eigen vectors were computed using")
. TABLE I EIGEN VALUES OF ADJACENT MATRICES A AND B A -2.4142-1.7321-1.0000-1.")
2 (a) (b) Fig. 1 Eight link (2- ternary and 6- binary) kinematic chains The adjacent matrices for the two chains is noted as A and B respectively as shown below: Eigen values and eigen vectors were computed using MATLAB simulation tool and are tabulated in Table I, II and III. From Table I it is clear that the two adjacent matrices have the same eigen values. From Table II and III it is evident that even eigen values match with each other (1 6, 2 5, 3 8, 4 4, 5 2, 6 7, 7 1, 8 3). TABLE I EIGEN VALUES OF ADJACENT MATRICES A AND B A B TABLE III EIGEN VECTORS OF ADJACENT MATRIX A


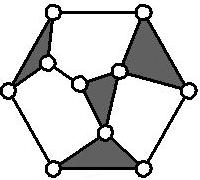
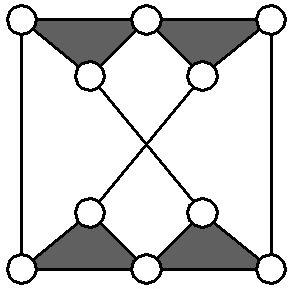
3 International Journal for Research in Applied Science & Engineering Technology (IJRASET) TABLE IIIII EIGEN VECTORS OF ADJACENT MATRIX B The row transformation matrix is obtained as It was also observed that the product TAT-1 is equal to B, Hence the kinematic chains considered are isomorphic. The results obtained were compared with J.P. Cubillo et al. [6] and it was evident that the results were in good agreement with each other. B. Procedure To Identify Isomorphism of Two Kinematic Chains Using Fuzzy Method Wang et al. [10] proposed the formulation to identify the isomorphism between the kinematic chains. According to Wang, if the similarity index obtained from equation (1) is equal to 1 then the kinematic chains considered are isomorphic, where as if it is less than 1 then the kinematic chains are said to be non-isomorphic. This method is explained by considering two inversions of 6 bar (4-binary, 2-ternary) kinematic chains. (a) (b) Fig. 2 Six link (2- ternary and 4- binary) kinematic chains (a) Stephenson s mechanism (b) Watt s mechanism Fuzzy numbers were computed for Stephenson s mechanism as shown below: 2640
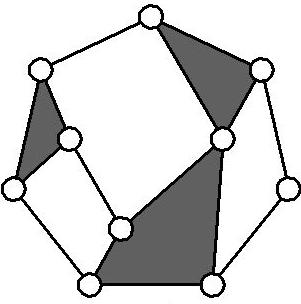
![Fuzzy numbers obtained above are arranged in descending order [0.3, 0.3, 0.26, 0.26, 0.23, 0.23]. Similarly the procedure is repeated for watt s chain shown in Fig.](/docs-images/92/109948516/images/4-1.jpg "2 (b), to obtain the fuzzy similarity index numbers as [0.3, 0.3, 0.23, 0.23, 0.23, 0.23]. Fuzzy similarity index was obtained by using equation 1, which is 0.96 in magnitude.")
![The value obtained is less than one, hence the kinematic chains considered are non-isomorphic. The results obtained were compared with Kunal et al. [15] and the results were in line with each other.](/docs-images/92/109948516/images/4-3.jpg "C. Procedure To Identify Isomorphism of Two Kinematic Chains Using Least Path Method This method involves in detection of isomorphism and inversion by parametric approach.")
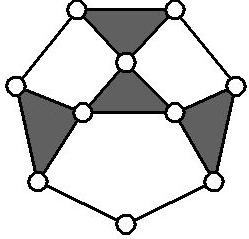
4 Fuzzy numbers obtained above are arranged in descending order [0.3, 0.3, 0.26, 0.26, 0.23, 0.23]. Similarly the procedure is repeated for watt s chain shown in Fig. 2 (b), to obtain the fuzzy similarity index numbers as [0.3, 0.3, 0.23, 0.23, 0.23, 0.23]. Fuzzy similarity index was obtained by using equation 1, which is 0.96 in magnitude. The value obtained is less than one, hence the kinematic chains considered are non-isomorphic. The results obtained were compared with Kunal et al. [15] and the results were in line with each other. C. Procedure To Identify Isomorphism of Two Kinematic Chains Using Least Path Method This method involves in detection of isomorphism and inversion by parametric approach. This method is illustrated using Stephenson s and Watt s chain mechanism. By using values on the basis of the parameter a least distance matrix [LDM] is formed. In these mechanisms, each node of quaternary link is assigned a node value 3/4 and for ternary link joint value 2/3 and for binary link joint value of 1/2 is assigned. For simplicity of calculation to each joint a non fractional value is assigned on the basis of taking L.C.M. of joint values by which we can take same denominator for all joint value for various link connectivities. Fig. 3 Six bar Stephenson s chain with joint number Thus at a node joining a ternary & binary, binary & binary links a node value will be assigned as 2/6 and 1/4 respectively. A 6X6 matrix will be formed for a six link Stephenson s chain shown in Fig. 3. Kinematic link value (KLV) for A, B, C, D, E & F are 324, 384, 324, 360, 360 and 384 respectively. Kinematic link string (KLS) for A, B, C, D, E & F are:-[0, 3(48), 84, 96], [0, 2(48), 3(96)], [0, 3(48), 84, 96], [0, 36, 48, 84, 2(96)], [0, 36, 48, 84, 2(96)], [0, 2(48), 3(96)] respectively. From the above values it is clear that A and C will have the same inversions, link B and F will have same inversions, link D and E will have same inversions. Kinematic string value (KCS) is 2136,2[36,6(48),2(84),6(96)]. Further this method is applied to Watt s chain shown in Fig. 4. Fig. 4 Six bar Watt s chain with joint number 2641

, 64, 2(84)], [0, 36, 48, 84, 96, 132], [0,")
![36, 48, 84, 96, 132], [0, 2(48), 64, 2(84)], [0, 36,](/docs-images/92/109948516/images/5-3.jpg "48, 84, 96, 132] and [0, 36, 48, 84, 96, 132]")
, 4(48), 64, 4(84), 2(96), 2(132)].")




5 Kinematic link value (KLV) for A, B, C, D, E & F are 328, 396, 396, 328, 396, 396 respectively. Kinematic link string (KLS) for A, B, C, D, E & F are [0, 2(48), 64, 2(84)], [0, 36, 48, 84, 96, 132], [0, 36, 48, 84, 96, 132], [0, 2(48), 64, 2(84)], [0, 36, 48, 84, 96, 132] and [0, 36, 48, 84, 96, 132] respectively. The Kinematic chain string (KCS) is 204.2[2(36), 4(48), 64, 4(84), 2(96), 2(132)]. When both the KCS of two kinematic chains are compared it was found that they are non-isomorphic in nature. The results obtained were coincident with Syed et al. [16]. III. RESULTS AND DISCUSSION Further the study was extended to understand and analyze all the three methods explained above by considering 19 different 8 link kinematics chains as shown in Fig. 5. Each of these kinematic chains were examined for possible isomorphism. (a) (b) (c) (d) (e) (f) (g) (h) (i) 2642
 (m)")
 (q)")


6 (j) (k) (l) (m) (n) (o) (p) (q) (r) (s) Fig. 5 Eight link (combination of binary, ternary and quaternary links) kinematic chains 2643
7 From Table IV it is evident that the results obtained from all the three methods do not concur for the kinematic chains considered for the analysis. According to adjacent matrix method all the kinematic chains considered are non-isomorphic whereas according to least path matrix method kinematic chain pair c-r and i-s isomorphic mechanisms. According to fuzzy similarity index method c-r-is, are isomorphic and all other kinematic chains considered are non-isomorphic. It was also observed that the outputs of the adjacent matrix method depend on link numbers assigned and there is no specific method to do the same. TABLE IV COMPARATIVE ISOMORPHIC RESULTS OF 19 KINEMATIC CHAINS CONSIDERED Methods Isomorphism Non- Isomorphism Adjacent Matrix Method Nil All Least Path Matrix Method (c r) and (i s) All other Fuzzy Similarity Index Method (c r i s) All other IV. CONCLUSIONS Comparative analysis of different methods of identifying isomorphic kinematic chain was carried out. Adjacent matrices method (i.e. Eigen value and Eigen vector approach), least path matrices method and fuzzy similarity index methods were chosen for the analysis. 19 inversions of 8 bar kinematic chain mechanisms were selected for the simulations. From the results it was evident that each of these methods have their short comings as they fail to agree in their outcomes. REFERENCES [1] A.G. Ambekar, V.P. Agrawal, on canonical numbering of kinematic chains and isomorphism problem: max code, ASME paper no. 86-DET-169. [2] A.G. Ambekar, V.P. Agrawal, Canonical numbering of kinematic chains and isomorphism problem: min code, Mech. Mach. Theory 22 (1987) [3] T.J. Jongsma et al., An efficient algorithm for finding optimum code under the condition of incident degree, Proceedings of Mechanical Conference, vol. 47, 1992, pp [4] C.S. Tang, T. Liu, The degree codea new mechanism identifier, J. Mech. Des. ASME Trans. 115 (1993) [5] J.K. Shin, S. Krishnamurty, On identification and canonical numbering of pin jointed kinematic chains, J. Mech. Des. ASME Trans. 116 (1994) [6] Cubillo, J. P., and Jinbao Wan. "Comments on mechanism kinematic chain isomorphism identification using adjacent matrices." Mechanism and Machine Theory 40.2 (2005): [7] A.C. Rao, Comparison of plane and spatial kinematic chains for structural error performance using pseudo-hamming distance, Indian J. Technol. 26 (1988) [8] A.C. Rao, D. Varada Raju, Application of the Hamming number technique to detect isomorphism among kinematic chains and inversions, Mech. Mach. Theory 26 (1991) [9] L.S.WOO, 1967, Type synthesis of plane linkages,journal of engineering for industry,asme,89: [10] Wang WJ New similarity measures on fuzzy sets and on elements. Fuzzy Sets Syst.85: [11] Mruthyunjaya T.S A computerized methodology for structural synthesis of kinematic chains: Part 1- formulation. Mech. Mach. Theory, Vol. 19(6), pp [12] Yadav J.N., Pratap C.R. and Agarwal V.P Computer aided detection of isomorphism among kinematic chains and mechanisms using the link-link multiplicity distance concept. Mech. Mach. Theory, Vol. 31(7), pp [13] Kong F.G., Q. Li and Zhang W.J An artificial neural network approach to mechanism kinematic chain isomorphism identification. Mech. Mach. Theory, Vol. 34(2), pp [14] Quist F.F. and Soni. A.H Structural synthesis and analysis of kinematic chains using path matrices. In. Proceedings of the 3rd World Congress for Theory of Machines and Mechanisms, pp. D161 D176. [15] Kunal Dewangan, Vipin kumar Pathak, Vibhav Raj Chaukse A Least Path Matrix concept to detect isomorphism in planar kinematic chains Vol 4 Issue VIII,August 2016, ISSN: [16] Syed Shane Haider Rizvi, Ali Hasan, R.A Khan A new concept to detect isomorphism in kinematic chains using Fuzzy similarity index Vol 86-No 12, January [17] Patil, S. F., and S. C. Pilli. "Structural Synthesis Of Kinematic Chains Using Eigenvalues And Eigenvectors." 13th national conference on mechanisms and machines [18] J.J. Uicker and A. Raicu A method for the identification and recognition of equivalence of kinematic chains Mech.Mach.Theory,Vol.10,1975,pp
A STRUCTURAL WEIGHT BASED MINIMUM DISTANCE PATH METHOD USED FOR IDENTIFICATION, ISOMORPHISM AND DISTINCT MECHANISMS OF KINEMATIC CHAINS
 A STRUCTURAL WEIGHT BASED MINIMUM DISTANCE PATH METHOD USED FOR IDENTIFICATION, ISOMORPHISM AND DISTINCT MECHANISMS OF KINEMATIC CHAINS Dr.S.R.Madan 1, Dr.A.R.Madan 2, Sajid Qureshi 3 1-Department of Mechanical
A STRUCTURAL WEIGHT BASED MINIMUM DISTANCE PATH METHOD USED FOR IDENTIFICATION, ISOMORPHISM AND DISTINCT MECHANISMS OF KINEMATIC CHAINS Dr.S.R.Madan 1, Dr.A.R.Madan 2, Sajid Qureshi 3 1-Department of Mechanical
Study of Multiple Jointed Kinematic Chains
 ISSN (e): 2250 3005 Volume, 08 Issue, 1 January 2018 International Journal of Computational Engineering Research (IJCER) Study of Multiple Jointed Kinematic Chains *Dr. Ali Hasan Mechanical Engineering
ISSN (e): 2250 3005 Volume, 08 Issue, 1 January 2018 International Journal of Computational Engineering Research (IJCER) Study of Multiple Jointed Kinematic Chains *Dr. Ali Hasan Mechanical Engineering
Atlas of Fixed Links and Equivalent Links in Mechanisms of 6 Links, 7 Joints, 1F Kinematic Chains Using [JJ] Matrix
![Atlas of Fixed Links and Equivalent Links in Mechanisms of 6 Links, 7 Joints, 1F Kinematic Chains Using [JJ] Matrix](/thumbs/74/70568404.jpg "Atlas of Fixed Links and Equivalent Links in Mechanisms of 6 Links, 7 Joints, 1F Kinematic Chains Using [JJ] Matrix") Atlas of Fixed Links and Equivalent Links in Mechanisms of 6 Links, 7 Joints, 1F Kinematic Chains Using [JJ] Matrix Dr. Ali Hasan Mechanical Engineering Department, Jamia Millia Islamia, New Delhi. ABSTRACT-Author
Atlas of Fixed Links and Equivalent Links in Mechanisms of 6 Links, 7 Joints, 1F Kinematic Chains Using [JJ] Matrix Dr. Ali Hasan Mechanical Engineering Department, Jamia Millia Islamia, New Delhi. ABSTRACT-Author
MODELING AND ISOMORPHISM VERIFICATION OF EIGHT LINKS BASE KINEMATIC CHAINS USING MATLAB
 International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 6, November - December 2018, pp. 172 177, Article ID: IJARET_09_06_018 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=6
International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 6, November - December 2018, pp. 172 177, Article ID: IJARET_09_06_018 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=6
Assortments of Links in a Kinematic Chains
 Assortments of Links in a Kinematic Chains Suwarna Torgal 1 1 Mechanical Engineering Department, Institution of Engineering and Technology, Devi Ahilya Vishwavidyalaya Indore E-mail: suwarnass@rediffmail.com;
Assortments of Links in a Kinematic Chains Suwarna Torgal 1 1 Mechanical Engineering Department, Institution of Engineering and Technology, Devi Ahilya Vishwavidyalaya Indore E-mail: suwarnass@rediffmail.com;
International Journal of Advanced Engineering Technology
 Research Article TYPE OF FREEDOM OF SIMPLE JOINTED PLANAR KINEMATIC CHAINS USING C++ Mr. Chaudhari Ashok R *. Address for correspondence Lecturer, Mechanical Engg. Dept, U. V. Patel college of Engineering,
Research Article TYPE OF FREEDOM OF SIMPLE JOINTED PLANAR KINEMATIC CHAINS USING C++ Mr. Chaudhari Ashok R *. Address for correspondence Lecturer, Mechanical Engg. Dept, U. V. Patel college of Engineering,
Application of Fuzzy Entropy for the Rating of Kinematic Chains
 Application of Fuzzy Entropy for the Rating of Kinematic Chains Vallem Srinivasa Rao #1, Kuchibhotla Mallikarjuna Rao *2, Annambhotla Balaji Srinivasa Rao *3 # Associate Professor in Mechanical Engineering,
Application of Fuzzy Entropy for the Rating of Kinematic Chains Vallem Srinivasa Rao #1, Kuchibhotla Mallikarjuna Rao *2, Annambhotla Balaji Srinivasa Rao *3 # Associate Professor in Mechanical Engineering,
Singularity Analysis of an Extensible Kinematic Architecture: Assur Class N, Order N 1
 David H. Myszka e-mail: dmyszka@udayton.edu Andrew P. Murray e-mail: murray@notes.udayton.edu University of Dayton, Dayton, OH 45469 James P. Schmiedeler The Ohio State University, Columbus, OH 43210 e-mail:
David H. Myszka e-mail: dmyszka@udayton.edu Andrew P. Murray e-mail: murray@notes.udayton.edu University of Dayton, Dayton, OH 45469 James P. Schmiedeler The Ohio State University, Columbus, OH 43210 e-mail:
APPLICATION OF TREE GRAPHS IN STRUCTURAL SYNTHESIS OF PLANETARY GEARTRAINS
 International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 7, July 2017, pp. 1252 1259, Article ID: IJMET_08_07_013 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=7
International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 7, July 2017, pp. 1252 1259, Article ID: IJMET_08_07_013 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=7
ME 321 Kinematics and Dynamics of Machines
 .0 INTRODUCTION ME Kinematics and Dynamics of Machines All Text References in these notes are for: Mechanism Design: Analysis and Synthesis, Volume, Fourth Edition, Erdman, Sandor and Kota, Prentice-Hall,
.0 INTRODUCTION ME Kinematics and Dynamics of Machines All Text References in these notes are for: Mechanism Design: Analysis and Synthesis, Volume, Fourth Edition, Erdman, Sandor and Kota, Prentice-Hall,
Path Curvature of the Single Flier Eight-Bar Linkage
 Gordon R. Pennock ASME Fellow Associate Professor Edward C. Kinzel Research Assistant School of Mechanical Engineering, Purdue University, West Lafayette, Indiana 47907-2088 Path Curvature of the Single
Gordon R. Pennock ASME Fellow Associate Professor Edward C. Kinzel Research Assistant School of Mechanical Engineering, Purdue University, West Lafayette, Indiana 47907-2088 Path Curvature of the Single
CONNECTIVITY IN OPEN AND CLOSED LOOP ROBOTIC MECHANISMS
 CONNECTIVITY IN OPEN AND CLOSED LOOP ROBOTIC MECHANISMS Moshe Shoham Department of Mechanical Engineering Technion-Israel Institute of Technology Technion City, Haifa 000, Israel Bernard Roth Department
CONNECTIVITY IN OPEN AND CLOSED LOOP ROBOTIC MECHANISMS Moshe Shoham Department of Mechanical Engineering Technion-Israel Institute of Technology Technion City, Haifa 000, Israel Bernard Roth Department
[Hasan*, 4.(7): July, 2015] ISSN: (I2OR), Publication Impact Factor: 3.785
![[Hasan*, 4.(7): July, 2015] ISSN: (I2OR), Publication Impact Factor: 3.785](/thumbs/86/93816785.jpg "[Hasan*, 4.(7): July, 2015] ISSN: (I2OR), Publication Impact Factor: 3.785") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY STUDY OF EPICYCLIC GEAR TRAINS USING GRAPH THEORY Dr. Ali Hasan* * Mech. Engg.Deptt.,Jamia Millia Islamia, New Delhi. ABSTRACT
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY STUDY OF EPICYCLIC GEAR TRAINS USING GRAPH THEORY Dr. Ali Hasan* * Mech. Engg.Deptt.,Jamia Millia Islamia, New Delhi. ABSTRACT
Finding Reachable Workspace of a Robotic Manipulator by Edge Detection Algorithm
 International Journal of Advanced Mechatronics and Robotics (IJAMR) Vol. 3, No. 2, July-December 2011; pp. 43-51; International Science Press, ISSN: 0975-6108 Finding Reachable Workspace of a Robotic Manipulator
International Journal of Advanced Mechatronics and Robotics (IJAMR) Vol. 3, No. 2, July-December 2011; pp. 43-51; International Science Press, ISSN: 0975-6108 Finding Reachable Workspace of a Robotic Manipulator
Constraint and velocity analysis of mechanisms
 Constraint and velocity analysis of mechanisms Matteo Zoppi Dimiter Zlatanov DIMEC University of Genoa Genoa, Italy Su S ZZ-2 Outline Generalities Constraint and mobility analysis Examples of geometric
Constraint and velocity analysis of mechanisms Matteo Zoppi Dimiter Zlatanov DIMEC University of Genoa Genoa, Italy Su S ZZ-2 Outline Generalities Constraint and mobility analysis Examples of geometric
An Improved Dynamic Modeling of a 3-RPS Parallel Manipulator using the concept of DeNOC Matrices
 An Improved Dynamic Modeling of a 3-RPS Parallel Manipulator using the concept of DeNOC Matrices A. Rahmani Hanzaki, E. Yoosefi Abstract A recursive dynamic modeling of a three-dof parallel robot, namely,
An Improved Dynamic Modeling of a 3-RPS Parallel Manipulator using the concept of DeNOC Matrices A. Rahmani Hanzaki, E. Yoosefi Abstract A recursive dynamic modeling of a three-dof parallel robot, namely,
A METHODOLOGY FOR ANALYSIS OF TOPOLOGICAL CHARATERISTICS OF PLANETARY GEAR TRAINS
 A METHODOLOGY FOR ANALYSIS OF TOPOLOGICAL CHARATERISTICS OF PLANETARY GEAR TRAINS Dr. S.R.madan, Sajid Quresh, Mustaq Ptel Mahakal Institute of Technology and Management, UJJIN, (M.P.), India. ABSTRACT:-
A METHODOLOGY FOR ANALYSIS OF TOPOLOGICAL CHARATERISTICS OF PLANETARY GEAR TRAINS Dr. S.R.madan, Sajid Quresh, Mustaq Ptel Mahakal Institute of Technology and Management, UJJIN, (M.P.), India. ABSTRACT:-
Kinematics Fundamentals CREATING OF KINEMATIC CHAINS
 Kinematics Fundamentals CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies the
Kinematics Fundamentals CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies the
A NEW TECHNIQUE FOR SKETCHING EPICYCLIC GEAR MECHANISMS USING ACYCLIC GRAPH
 International Journal of Mechanical and Production Engineering Research and Development (IJMPERD) ISSN(P): 2249-6890; ISSN(E): 2249-8001 Vol. 4, Issue 3, Jun 2014, 79-90 TJPRC Pvt. Ltd. A NEW TECHNIQUE
International Journal of Mechanical and Production Engineering Research and Development (IJMPERD) ISSN(P): 2249-6890; ISSN(E): 2249-8001 Vol. 4, Issue 3, Jun 2014, 79-90 TJPRC Pvt. Ltd. A NEW TECHNIQUE
ABSTRACT. Rajesh Pavan Sunkari Doctor of Philosophy, 2006
 ABSTRACT Title of dissertation: STRUCTURAL SYNTHESIS AND ANALYSIS OF PLANAR AND SPATIAL MECHANISMS SATISFYING GRUEBLER S DEGREES OF FREEDOM EQUATION Rajesh Pavan Sunkari Doctor of Philosophy, 2006 Dissertation
ABSTRACT Title of dissertation: STRUCTURAL SYNTHESIS AND ANALYSIS OF PLANAR AND SPATIAL MECHANISMS SATISFYING GRUEBLER S DEGREES OF FREEDOM EQUATION Rajesh Pavan Sunkari Doctor of Philosophy, 2006 Dissertation
SYNTHESIS AND ANALYSIS OF EPICYCLIC GEAR TRAINS
 SYNTHESIS AND ANALYSIS OF EPICYCLIC GEAR TRAINS CHAPTER I INTRODUCTION 1.1 Brief History of Synthesis And Analysis In Mechanical Engineering design, an engmeer uses scientific principles, technical information
SYNTHESIS AND ANALYSIS OF EPICYCLIC GEAR TRAINS CHAPTER I INTRODUCTION 1.1 Brief History of Synthesis And Analysis In Mechanical Engineering design, an engmeer uses scientific principles, technical information
Biometric Palm vein Recognition using Local Tetra Pattern
 Biometric Palm vein Recognition using Local Tetra Pattern [1] Miss. Prajakta Patil [1] PG Student Department of Electronics Engineering, P.V.P.I.T Budhgaon, Sangli, India [2] Prof. R. D. Patil [2] Associate
Biometric Palm vein Recognition using Local Tetra Pattern [1] Miss. Prajakta Patil [1] PG Student Department of Electronics Engineering, P.V.P.I.T Budhgaon, Sangli, India [2] Prof. R. D. Patil [2] Associate
wavelet packet transform
 Research Journal of Engineering Sciences ISSN 2278 9472 Combining left and right palmprint for enhanced security using discrete wavelet packet transform Abstract Komal Kashyap * and Ekta Tamrakar Department
Research Journal of Engineering Sciences ISSN 2278 9472 Combining left and right palmprint for enhanced security using discrete wavelet packet transform Abstract Komal Kashyap * and Ekta Tamrakar Department
A Survey on Feature Extraction Techniques for Palmprint Identification
 International Journal Of Computational Engineering Research (ijceronline.com) Vol. 03 Issue. 12 A Survey on Feature Extraction Techniques for Palmprint Identification Sincy John 1, Kumudha Raimond 2 1
International Journal Of Computational Engineering Research (ijceronline.com) Vol. 03 Issue. 12 A Survey on Feature Extraction Techniques for Palmprint Identification Sincy John 1, Kumudha Raimond 2 1
A New Algorithm for Measuring and Optimizing the Manipulability Index
 A New Algorithm for Measuring and Optimizing the Manipulability Index Mohammed Mohammed, Ayssam Elkady and Tarek Sobh School of Engineering, University of Bridgeport, USA. Mohammem@bridgeport.edu Abstract:
A New Algorithm for Measuring and Optimizing the Manipulability Index Mohammed Mohammed, Ayssam Elkady and Tarek Sobh School of Engineering, University of Bridgeport, USA. Mohammem@bridgeport.edu Abstract:
Synthesis of Planar Mechanisms, Part XI: Al-Jazari Quick Return-Motion Mechanism Galal Ali Hassaan Emeritus Professor, Mechanical Design & Production
 Synthesis of Planar Mechanisms, Part XI: Al-Jazari Quick Return-Motion Mechanism Galal Ali Hassaan Emeritus Professor, Mechanical Design & Production Department. Faculty of Engineering, Cairo University,
Synthesis of Planar Mechanisms, Part XI: Al-Jazari Quick Return-Motion Mechanism Galal Ali Hassaan Emeritus Professor, Mechanical Design & Production Department. Faculty of Engineering, Cairo University,
SAMPLE STUDY MATERIAL. Mechanical Engineering. Postal Correspondence Course. Theory of Machines. GATE, IES & PSUs
 TOM - ME GATE, IES, PSU 1 SAMPLE STUDY MATERIAL Mechanical Engineering ME Postal Correspondence Course Theory of Machines GATE, IES & PSUs TOM - ME GATE, IES, PSU 2 C O N T E N T TOPIC 1. MACHANISMS AND
TOM - ME GATE, IES, PSU 1 SAMPLE STUDY MATERIAL Mechanical Engineering ME Postal Correspondence Course Theory of Machines GATE, IES & PSUs TOM - ME GATE, IES, PSU 2 C O N T E N T TOPIC 1. MACHANISMS AND
SYNTHESIS OF PLANAR MECHANISMS FOR PICK AND PLACE TASKS WITH GUIDING LOCATIONS
 Proceedings of the ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC/CIE 2013 August 4-7, 2013, Portland, Oregon, USA DETC2013-12021
Proceedings of the ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC/CIE 2013 August 4-7, 2013, Portland, Oregon, USA DETC2013-12021
A New Algorithm for Measuring and Optimizing the Manipulability Index
 DOI 10.1007/s10846-009-9388-9 A New Algorithm for Measuring and Optimizing the Manipulability Index Ayssam Yehia Elkady Mohammed Mohammed Tarek Sobh Received: 16 September 2009 / Accepted: 27 October 2009
DOI 10.1007/s10846-009-9388-9 A New Algorithm for Measuring and Optimizing the Manipulability Index Ayssam Yehia Elkady Mohammed Mohammed Tarek Sobh Received: 16 September 2009 / Accepted: 27 October 2009
Definition 2.3: [5] Let, and, be two simple graphs. Then the composition of graphs. and is denoted by,
![Definition 2.3: [5] Let, and, be two simple graphs. Then the composition of graphs. and is denoted by,](/thumbs/86/94752089.jpg "Definition 2.3: [5] Let, and, be two simple graphs. Then the composition of graphs. and is denoted by,") International Journal of Pure Applied Mathematics Volume 119 No. 14 2018, 891-898 ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu ON M-POLAR INTUITIONISTIC FUZZY GRAPHS K. Sankar 1,
International Journal of Pure Applied Mathematics Volume 119 No. 14 2018, 891-898 ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu ON M-POLAR INTUITIONISTIC FUZZY GRAPHS K. Sankar 1,
CHAPTER 3 MAINTENANCE STRATEGY SELECTION USING AHP AND FAHP
 31 CHAPTER 3 MAINTENANCE STRATEGY SELECTION USING AHP AND FAHP 3.1 INTRODUCTION Evaluation of maintenance strategies is a complex task. The typical factors that influence the selection of maintenance strategy
31 CHAPTER 3 MAINTENANCE STRATEGY SELECTION USING AHP AND FAHP 3.1 INTRODUCTION Evaluation of maintenance strategies is a complex task. The typical factors that influence the selection of maintenance strategy
Fingerprint Image Compression
 Fingerprint Image Compression Ms.Mansi Kambli 1*,Ms.Shalini Bhatia 2 * Student 1*, Professor 2 * Thadomal Shahani Engineering College * 1,2 Abstract Modified Set Partitioning in Hierarchical Tree with
Fingerprint Image Compression Ms.Mansi Kambli 1*,Ms.Shalini Bhatia 2 * Student 1*, Professor 2 * Thadomal Shahani Engineering College * 1,2 Abstract Modified Set Partitioning in Hierarchical Tree with
Rigid Dynamics Solution Methodology for 3-PSU Parallel Kinematic Manipulators
 Rigid Dynamics Solution Methodology for 3-PSU Parallel Kinematic Manipulators Arya B. Changela 1, Dr. Ramdevsinh Jhala 2, Chirag P. Kalariya 3 Keyur P. Hirpara 4 Assistant Professor, Department of Mechanical
Rigid Dynamics Solution Methodology for 3-PSU Parallel Kinematic Manipulators Arya B. Changela 1, Dr. Ramdevsinh Jhala 2, Chirag P. Kalariya 3 Keyur P. Hirpara 4 Assistant Professor, Department of Mechanical
Modelling of mechanical system CREATING OF KINEMATIC CHAINS
 Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
1314. Estimation of mode shapes expanded from incomplete measurements
 34. Estimation of mode shapes expanded from incomplete measurements Sang-Kyu Rim, Hee-Chang Eun, Eun-Taik Lee 3 Department of Architectural Engineering, Kangwon National University, Samcheok, Korea Corresponding
34. Estimation of mode shapes expanded from incomplete measurements Sang-Kyu Rim, Hee-Chang Eun, Eun-Taik Lee 3 Department of Architectural Engineering, Kangwon National University, Samcheok, Korea Corresponding
FPGA IMPLEMENTATION FOR REAL TIME SOBEL EDGE DETECTOR BLOCK USING 3-LINE BUFFERS
 FPGA IMPLEMENTATION FOR REAL TIME SOBEL EDGE DETECTOR BLOCK USING 3-LINE BUFFERS 1 RONNIE O. SERFA JUAN, 2 CHAN SU PARK, 3 HI SEOK KIM, 4 HYEONG WOO CHA 1,2,3,4 CheongJu University E-maul: 1 engr_serfs@yahoo.com,
FPGA IMPLEMENTATION FOR REAL TIME SOBEL EDGE DETECTOR BLOCK USING 3-LINE BUFFERS 1 RONNIE O. SERFA JUAN, 2 CHAN SU PARK, 3 HI SEOK KIM, 4 HYEONG WOO CHA 1,2,3,4 CheongJu University E-maul: 1 engr_serfs@yahoo.com,
Automatic topological structural synthesis algorithm of planar simple joint kinematic chains
 Research Article Automatic topological structural synthesis algorithm of planar simple joint kinematic chains Advances in Mechanical Engineering 016, Vol. (3) 1 1 Ó The Author(s) 016 DOI: 10.1177/1671401663055
Research Article Automatic topological structural synthesis algorithm of planar simple joint kinematic chains Advances in Mechanical Engineering 016, Vol. (3) 1 1 Ó The Author(s) 016 DOI: 10.1177/1671401663055
FUNCTION GENERATION SYNTHESIS OF PLANAR 5R MECHANISM
 FUNCTION GENERATION SYNTHESIS OF PLANAR 5R MECHANISM Gökhan Kiper*, Tunç Bilgincan** 1, Mehmet İsmet Can Dede* (*Assistant Professor,** Ph.D Student, Izmir Institute of Technology, 35437, Izmir, Turkey)
FUNCTION GENERATION SYNTHESIS OF PLANAR 5R MECHANISM Gökhan Kiper*, Tunç Bilgincan** 1, Mehmet İsmet Can Dede* (*Assistant Professor,** Ph.D Student, Izmir Institute of Technology, 35437, Izmir, Turkey)
Theory of Machines Course # 1
 Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
TENTH WORLD CONGRESS ON THE THEORY OF MACHINES AND MECHANISMS Oulu, Finland, June 20{24, 1999 THE EFFECT OF DATA-SET CARDINALITY ON THE DESIGN AND STR
 TENTH WORLD CONGRESS ON THE THEORY OF MACHINES AND MECHANISMS Oulu, Finland, June 20{24, 1999 THE EFFECT OF DATA-SET CARDINALITY ON THE DESIGN AND STRUCTURAL ERRORS OF FOUR-BAR FUNCTION-GENERATORS M.J.D.
TENTH WORLD CONGRESS ON THE THEORY OF MACHINES AND MECHANISMS Oulu, Finland, June 20{24, 1999 THE EFFECT OF DATA-SET CARDINALITY ON THE DESIGN AND STRUCTURAL ERRORS OF FOUR-BAR FUNCTION-GENERATORS M.J.D.
DETC APPROXIMATE MOTION SYNTHESIS OF SPHERICAL KINEMATIC CHAINS
 Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Dynamics modeling of structure-varying kinematic chains for free-flying robots
 Dynamics modeling of structure-varying kinematic chains for free-flying robots Roberto Lampariello, Satoko Abiko, Gerd Hirzinger Institute of Robotics and Mechatronics German Aerospace Center (DLR) 8 Weßling,
Dynamics modeling of structure-varying kinematic chains for free-flying robots Roberto Lampariello, Satoko Abiko, Gerd Hirzinger Institute of Robotics and Mechatronics German Aerospace Center (DLR) 8 Weßling,
Extension of Usable Workspace of Rotational Axes in Robot Planning
 Extension of Usable Workspace of Rotational Axes in Robot Planning Zhen Huang' andy. Lawrence Yao Department of Mechanical Engineering Columbia University New York, NY 127 ABSTRACT Singularity of a robot
Extension of Usable Workspace of Rotational Axes in Robot Planning Zhen Huang' andy. Lawrence Yao Department of Mechanical Engineering Columbia University New York, NY 127 ABSTRACT Singularity of a robot
Realization of Hardware Architectures for Householder Transformation based QR Decomposition using Xilinx System Generator Block Sets
 IJSTE - International Journal of Science Technology & Engineering Volume 2 Issue 08 February 2016 ISSN (online): 2349-784X Realization of Hardware Architectures for Householder Transformation based QR
IJSTE - International Journal of Science Technology & Engineering Volume 2 Issue 08 February 2016 ISSN (online): 2349-784X Realization of Hardware Architectures for Householder Transformation based QR
Research Article Image Retrieval using Clustering Techniques. K.S.Rangasamy College of Technology,,India. K.S.Rangasamy College of Technology, India.
 Journal of Recent Research in Engineering and Technology 3(1), 2016, pp21-28 Article ID J11603 ISSN (Online): 2349 2252, ISSN (Print):2349 2260 Bonfay Publications, 2016 Research Article Image Retrieval
Journal of Recent Research in Engineering and Technology 3(1), 2016, pp21-28 Article ID J11603 ISSN (Online): 2349 2252, ISSN (Print):2349 2260 Bonfay Publications, 2016 Research Article Image Retrieval
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software
 Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
Closed Pattern Mining from n-ary Relations
 Closed Pattern Mining from n-ary Relations R V Nataraj Department of Information Technology PSG College of Technology Coimbatore, India S Selvan Department of Computer Science Francis Xavier Engineering
Closed Pattern Mining from n-ary Relations R V Nataraj Department of Information Technology PSG College of Technology Coimbatore, India S Selvan Department of Computer Science Francis Xavier Engineering
DCT SVD Based Hybrid Transform Coding for Image Compression
 DCT SVD Based Hybrid Coding for Image Compression Raghavendra.M.J 1, 1 Assistant Professor, Department of Telecommunication P.E.S. Institute of Technology Bangalore, India mjraghavendra@gmail.com Dr.Prasantha.H.S
DCT SVD Based Hybrid Coding for Image Compression Raghavendra.M.J 1, 1 Assistant Professor, Department of Telecommunication P.E.S. Institute of Technology Bangalore, India mjraghavendra@gmail.com Dr.Prasantha.H.S
A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer
 A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer Ambuja Singh Student Saakshi Singh Student, Ratna Priya Kanchan Student, Abstract -Robot kinematics the
A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer Ambuja Singh Student Saakshi Singh Student, Ratna Priya Kanchan Student, Abstract -Robot kinematics the
OPTIMIZATION OF INVERSE KINEMATICS OF ROBOTIC ARM USING ANFIS
 OPTIMIZATION OF INVERSE KINEMATICS OF ROBOTIC ARM USING ANFIS 1. AMBUJA SINGH, 2. DR. MANOJ SONI 1(M.TECH STUDENT, R&A, DEPARTMENT OF MAE, IGDTUW, DELHI, INDIA) 2(ASSOCIATE PROFESSOR, DEPARTMENT OF MAE,
OPTIMIZATION OF INVERSE KINEMATICS OF ROBOTIC ARM USING ANFIS 1. AMBUJA SINGH, 2. DR. MANOJ SONI 1(M.TECH STUDENT, R&A, DEPARTMENT OF MAE, IGDTUW, DELHI, INDIA) 2(ASSOCIATE PROFESSOR, DEPARTMENT OF MAE,
TAGUCHI TECHNIQUES FOR 2 k FRACTIONAL FACTORIAL EXPERIMENTS
 Hacettepe Journal of Mathematics and Statistics Volume 4 (200), 8 9 TAGUCHI TECHNIQUES FOR 2 k FRACTIONAL FACTORIAL EXPERIMENTS Nazan Danacıoğlu and F.Zehra Muluk Received 0: 0: 200 : Accepted 14: 06:
Hacettepe Journal of Mathematics and Statistics Volume 4 (200), 8 9 TAGUCHI TECHNIQUES FOR 2 k FRACTIONAL FACTORIAL EXPERIMENTS Nazan Danacıoğlu and F.Zehra Muluk Received 0: 0: 200 : Accepted 14: 06:
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR
 SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
Analytical and Applied Kinematics
 Analytical and Applied Kinematics Vito Moreno moreno@engr.uconn.edu 860-614-2365 (cell) http://www.engr.uconn.edu/~moreno Office EB1, hours Thursdays 10:00 to 5:00 1 This course introduces a unified and
Analytical and Applied Kinematics Vito Moreno moreno@engr.uconn.edu 860-614-2365 (cell) http://www.engr.uconn.edu/~moreno Office EB1, hours Thursdays 10:00 to 5:00 1 This course introduces a unified and
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR
 MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
Multidirectional 2DPCA Based Face Recognition System
 Multidirectional 2DPCA Based Face Recognition System Shilpi Soni 1, Raj Kumar Sahu 2 1 M.E. Scholar, Department of E&Tc Engg, CSIT, Durg 2 Associate Professor, Department of E&Tc Engg, CSIT, Durg Email:
Multidirectional 2DPCA Based Face Recognition System Shilpi Soni 1, Raj Kumar Sahu 2 1 M.E. Scholar, Department of E&Tc Engg, CSIT, Durg 2 Associate Professor, Department of E&Tc Engg, CSIT, Durg Email:
Performance Analysis of Gray Code based Structured Regular Column-Weight Two LDPC Codes
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 11, Issue 4, Ver. III (Jul.-Aug.2016), PP 06-10 www.iosrjournals.org Performance Analysis
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 11, Issue 4, Ver. III (Jul.-Aug.2016), PP 06-10 www.iosrjournals.org Performance Analysis
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer
 Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Unified PMU Placement Algorithm for Power Systems
 Unified PMU Placement Algorithm for Power Systems Kunal Amare, and Virgilio A. Centeno Bradley Department of Electrical and Computer Engineering, Virginia Tech Blacksburg, VA-24061, USA. Anamitra Pal Network
Unified PMU Placement Algorithm for Power Systems Kunal Amare, and Virgilio A. Centeno Bradley Department of Electrical and Computer Engineering, Virginia Tech Blacksburg, VA-24061, USA. Anamitra Pal Network
Solving the Kinematics of Planar Mechanisms. Jassim Alhor
 Solving the Kinematics of Planar Mechanisms Jassim Alhor Table of Contents 1.0 Introduction 3 2.0 Methodology 3 2.1 Modeling in the Complex Plane 4 2.2 Writing the Loop Closure Equations 4 2.3 Solving
Solving the Kinematics of Planar Mechanisms Jassim Alhor Table of Contents 1.0 Introduction 3 2.0 Methodology 3 2.1 Modeling in the Complex Plane 4 2.2 Writing the Loop Closure Equations 4 2.3 Solving
VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G.
 VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G. Satheesh Kumar, Y. G. Srinivasa and T. Nagarajan Precision Engineering and Instrumentation Laboratory Department of Mechanical Engineering Indian
VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G. Satheesh Kumar, Y. G. Srinivasa and T. Nagarajan Precision Engineering and Instrumentation Laboratory Department of Mechanical Engineering Indian
Generalized Network Flow Programming
 Appendix C Page Generalized Network Flow Programming This chapter adapts the bounded variable primal simplex method to the generalized minimum cost flow problem. Generalized networks are far more useful
Appendix C Page Generalized Network Flow Programming This chapter adapts the bounded variable primal simplex method to the generalized minimum cost flow problem. Generalized networks are far more useful
ISSN: ISO 9001:2008 Certified International Journal of Engineering and Innovative Technology (IJEIT) Volume 7, Issue 1, July 2017
 Volume 7, Issue 1, July 2017") Congestion Management in Deregulated Power System Using Market Splitting Based Approach Manish Harchand 1, KanwardeepSingh 2 M.Tech student 1, Associate professor 2 Department of Electrical Engineering,
Congestion Management in Deregulated Power System Using Market Splitting Based Approach Manish Harchand 1, KanwardeepSingh 2 M.Tech student 1, Associate professor 2 Department of Electrical Engineering,
Optimization of Six Bar Knee Linkage for Stability of Knee Prosthesis
 Optimization of Six Bar Knee Linkage for Stability of Knee Prosthesis Narjes.Ghaemi 1, Morteza. Dardel 2, Mohammad Hassan Ghasemi 3, Hassan.Zohoor 4, 1- M.sc student, Babol Noshirvani University of Technology,
Optimization of Six Bar Knee Linkage for Stability of Knee Prosthesis Narjes.Ghaemi 1, Morteza. Dardel 2, Mohammad Hassan Ghasemi 3, Hassan.Zohoor 4, 1- M.sc student, Babol Noshirvani University of Technology,
Kinematic Synthesis. October 6, 2015 Mark Plecnik
 Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Force-Moment Capabilities of Redundantly-Actuated Planar-Parallel Architectures
 Force-Moment Capabilities of Redundantly-Actuated Planar-Parallel Architectures S. B. Nokleby F. Firmani A. Zibil R. P. Podhorodeski UOIT University of Victoria University of Victoria University of Victoria
Force-Moment Capabilities of Redundantly-Actuated Planar-Parallel Architectures S. B. Nokleby F. Firmani A. Zibil R. P. Podhorodeski UOIT University of Victoria University of Victoria University of Victoria
Synthesis of Planar Mechanisms, Part IX: Path Generation using 6 Bar 2 Sliders Mechanism
 International Journal of Computer Techniques - Volume 2 Issue 6, Nov- Dec 2015 RESEARCH ARTICLE Synthesis of Planar Mechanisms, Part IX: Path Generation using 6 Bar 2 Sliders Mechanism Galal Ali Hassaan
International Journal of Computer Techniques - Volume 2 Issue 6, Nov- Dec 2015 RESEARCH ARTICLE Synthesis of Planar Mechanisms, Part IX: Path Generation using 6 Bar 2 Sliders Mechanism Galal Ali Hassaan
Type Synthesis of Complaint 5-bar Mechanisms With Application to Mechanical Disc Brakes
 Type Synthesis of Complaint 5-bar Mechanisms With Application to Mechanical Disc Brakes Scott H. Brooks, Spencer P. Magleby*, Peter Halverson, and Larry L. Howell Mechanical Engineering Department, Brigham
Type Synthesis of Complaint 5-bar Mechanisms With Application to Mechanical Disc Brakes Scott H. Brooks, Spencer P. Magleby*, Peter Halverson, and Larry L. Howell Mechanical Engineering Department, Brigham
Face Recognition using Principle Component Analysis, Eigenface and Neural Network
 Face Recognition using Principle Component Analysis, Eigenface and Neural Network Mayank Agarwal Student Member IEEE Noida,India mayank.agarwal@ieee.org Nikunj Jain Student Noida,India nikunj262@gmail.com
Face Recognition using Principle Component Analysis, Eigenface and Neural Network Mayank Agarwal Student Member IEEE Noida,India mayank.agarwal@ieee.org Nikunj Jain Student Noida,India nikunj262@gmail.com
International Association of Scientific Innovation and Research (IASIR) (An Association Unifying the Sciences, Engineering, and Applied Research)
 (An Association Unifying the Sciences, Engineering, and Applied Research)") International Association of Scientific Innovation and Research (IASIR) (An Association Unifying the Sciences, Engineering, and Applied Research) International Journal of Emerging Technologies in Computational
International Association of Scientific Innovation and Research (IASIR) (An Association Unifying the Sciences, Engineering, and Applied Research) International Journal of Emerging Technologies in Computational
HIGH PERFORMANCE QUATERNARY ARITHMETIC LOGIC UNIT ON PROGRAMMABLE LOGIC DEVICE
 International Journal of Advances in Applied Science and Engineering (IJAEAS) ISSN (P): 2348-1811; ISSN (E): 2348-182X Vol. 2, Issue 1, Feb 2015, 01-07 IIST HIGH PERFORMANCE QUATERNARY ARITHMETIC LOGIC
International Journal of Advances in Applied Science and Engineering (IJAEAS) ISSN (P): 2348-1811; ISSN (E): 2348-182X Vol. 2, Issue 1, Feb 2015, 01-07 IIST HIGH PERFORMANCE QUATERNARY ARITHMETIC LOGIC
WEEKS 1-2 MECHANISMS
 References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
Currency Recognition with Denomination based on Edge Detection and Neural Networks
 GRD Journals Global Research and Development Journal for Engineering National Conference on Advancement in Emerging Technologies (NCAET'18) March 2018 e-issn: 2455-5703 Currency Recognition with Denomination
GRD Journals Global Research and Development Journal for Engineering National Conference on Advancement in Emerging Technologies (NCAET'18) March 2018 e-issn: 2455-5703 Currency Recognition with Denomination
MEMORY EFFICIENT WDR (WAVELET DIFFERENCE REDUCTION) using INVERSE OF ECHELON FORM by EQUATION SOLVING
 using INVERSE OF ECHELON FORM by EQUATION SOLVING") Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC Vol. 3 Issue. 7 July 2014 pg.512
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC Vol. 3 Issue. 7 July 2014 pg.512
Effect of change of the orientation of dyad links on kinematics of Stephenson-III six-bar linkage
 Effect of change of the orientation of dyad links on kinematics of Stephenson-III six-bar linkage Tanmay Agrawal, Kushagra Upadhyay, Nitin Sharma and Rakesh Sehgal* Department of Mechanical Engineering
Effect of change of the orientation of dyad links on kinematics of Stephenson-III six-bar linkage Tanmay Agrawal, Kushagra Upadhyay, Nitin Sharma and Rakesh Sehgal* Department of Mechanical Engineering
Rotating Table with Parallel Kinematic Featuring a Planar Joint
 Rotating Table with Parallel Kinematic Featuring a Planar Joint Stefan Bracher *, Luc Baron and Xiaoyu Wang Ecole Polytechnique de Montréal, C.P. 679, succ. C.V. H3C 3A7 Montréal, QC, Canada Abstract In
Rotating Table with Parallel Kinematic Featuring a Planar Joint Stefan Bracher *, Luc Baron and Xiaoyu Wang Ecole Polytechnique de Montréal, C.P. 679, succ. C.V. H3C 3A7 Montréal, QC, Canada Abstract In
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
A Novel Approach to the Indian Paper Currency Recognition Using Image Processing
 A Novel Approach to the Indian Paper Currency Recognition Using Image Processing Lakshmi Narayanan 1, Bhavna Pancholi 2 1 PG Student, Dept of EE, The Faculty of Technology and Engineering Maharaja Sayajirao
A Novel Approach to the Indian Paper Currency Recognition Using Image Processing Lakshmi Narayanan 1, Bhavna Pancholi 2 1 PG Student, Dept of EE, The Faculty of Technology and Engineering Maharaja Sayajirao
Comparative Analysis of 2-Level and 4-Level DWT for Watermarking and Tampering Detection
 International Journal of Latest Engineering and Management Research (IJLEMR) ISSN: 2455-4847 Volume 1 Issue 4 ǁ May 2016 ǁ PP.01-07 Comparative Analysis of 2-Level and 4-Level for Watermarking and Tampering
International Journal of Latest Engineering and Management Research (IJLEMR) ISSN: 2455-4847 Volume 1 Issue 4 ǁ May 2016 ǁ PP.01-07 Comparative Analysis of 2-Level and 4-Level for Watermarking and Tampering
A Matlab based Face Recognition GUI system Using Principal Component Analysis and Artificial Neural Network
 A Matlab based Face Recognition GUI system Using Principal Component Analysis and Artificial Neural Network Achala Khandelwal 1 and Jaya Sharma 2 1,2 Asst Prof Department of Electrical Engineering, Shri
A Matlab based Face Recognition GUI system Using Principal Component Analysis and Artificial Neural Network Achala Khandelwal 1 and Jaya Sharma 2 1,2 Asst Prof Department of Electrical Engineering, Shri
Data-Driven Kinematics: Unifying Synthesis of Planar Four-Bar Linkages via Motion Analysis
 Data-Driven Kinematics: Unifying Synthesis of Planar Four-Bar Linkages via Motion Analysis Anurag Purwar, Q. Jeffrey Ge Abstract This paper presents a novel data-driven approach for kinematic synthesis
Data-Driven Kinematics: Unifying Synthesis of Planar Four-Bar Linkages via Motion Analysis Anurag Purwar, Q. Jeffrey Ge Abstract This paper presents a novel data-driven approach for kinematic synthesis
Multimaterial Geometric Design Theories and their Applications
 Multimaterial Geometric Design Theories and their Applications Hong Zhou, Ph.D. Associate Professor Department of Mechanical Engineering Texas A&M University-Kingsville October 19, 2011 Contents Introduction
Multimaterial Geometric Design Theories and their Applications Hong Zhou, Ph.D. Associate Professor Department of Mechanical Engineering Texas A&M University-Kingsville October 19, 2011 Contents Introduction
DESIGN AND ANALYSIS OF WEIGHT SHIFT STEERING MECHANISM BASED ON FOUR BAR MECHANISM
 International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 12, December 2017, pp. 417 424, Article ID: IJMET_08_12_041 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=12
International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 12, December 2017, pp. 417 424, Article ID: IJMET_08_12_041 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=12
Direction-Length Code (DLC) To Represent Binary Objects
 To Represent Binary Objects") IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 18, Issue 2, Ver. I (Mar-Apr. 2016), PP 29-35 www.iosrjournals.org Direction-Length Code (DLC) To Represent Binary
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 18, Issue 2, Ver. I (Mar-Apr. 2016), PP 29-35 www.iosrjournals.org Direction-Length Code (DLC) To Represent Binary
International Journal of Emerging Technologies in Computational and Applied Sciences (IJETCAS)
") International Association of Scientific Innovation and Research (IASIR) (An Association Unifying the Sciences, Engineering, and Applied Research) International Journal of Emerging Technologies in Computational
International Association of Scientific Innovation and Research (IASIR) (An Association Unifying the Sciences, Engineering, and Applied Research) International Journal of Emerging Technologies in Computational
Solving Systems of Equations Using Matrices With the TI-83 or TI-84
 Solving Systems of Equations Using Matrices With the TI-83 or TI-84 Dimensions of a matrix: The dimensions of a matrix are the number of rows by the number of columns in the matrix. rows x columns *rows
Solving Systems of Equations Using Matrices With the TI-83 or TI-84 Dimensions of a matrix: The dimensions of a matrix are the number of rows by the number of columns in the matrix. rows x columns *rows
Performance of general graph isomorphism algorithms Sara Voss Coe College, Cedar Rapids, IA
 Performance of general graph isomorphism algorithms Sara Voss Coe College, Cedar Rapids, IA I. Problem and Motivation Graphs are commonly used to provide structural and/or relational descriptions. A node
Performance of general graph isomorphism algorithms Sara Voss Coe College, Cedar Rapids, IA I. Problem and Motivation Graphs are commonly used to provide structural and/or relational descriptions. A node
INVERSE KINEMATICS OF A BINARY FLEXIBLE MANIPULATOR USING GENETIC ALGORITHMS
 Proceedings of COBEM 005 Copyright 005 by ABCM 18th International Congress of Mechanical Engineering November 6-11, 005, Ouro Preto, MG INVERSE KINEMATICS OF A BINARY FLEXIBLE MANIPULATOR USING GENETIC
Proceedings of COBEM 005 Copyright 005 by ABCM 18th International Congress of Mechanical Engineering November 6-11, 005, Ouro Preto, MG INVERSE KINEMATICS OF A BINARY FLEXIBLE MANIPULATOR USING GENETIC
Bi-mobile Mechanisms Designed by Means of Their Inverse Models
 International Conference on Applied Mechanics, Electronics and Mechatronics Engineering (AMEME ) ISBN: ---- Bi-mobile Mechanisms Designed by Means of ir Inverse Models Adriana COMANESCU * and Claudiu ZALESCHI
International Conference on Applied Mechanics, Electronics and Mechatronics Engineering (AMEME ) ISBN: ---- Bi-mobile Mechanisms Designed by Means of ir Inverse Models Adriana COMANESCU * and Claudiu ZALESCHI
NORMALIZATION INDEXING BASED ENHANCED GROUPING K-MEAN ALGORITHM
 NORMALIZATION INDEXING BASED ENHANCED GROUPING K-MEAN ALGORITHM Saroj 1, Ms. Kavita2 1 Student of Masters of Technology, 2 Assistant Professor Department of Computer Science and Engineering JCDM college
NORMALIZATION INDEXING BASED ENHANCED GROUPING K-MEAN ALGORITHM Saroj 1, Ms. Kavita2 1 Student of Masters of Technology, 2 Assistant Professor Department of Computer Science and Engineering JCDM college
FACE RECOGNITION USING FUZZY NEURAL NETWORK
 FACE RECOGNITION USING FUZZY NEURAL NETWORK TADI.CHANDRASEKHAR Research Scholar, Dept. of ECE, GITAM University, Vishakapatnam, AndraPradesh Assoc. Prof., Dept. of. ECE, GIET Engineering College, Vishakapatnam,
FACE RECOGNITION USING FUZZY NEURAL NETWORK TADI.CHANDRASEKHAR Research Scholar, Dept. of ECE, GITAM University, Vishakapatnam, AndraPradesh Assoc. Prof., Dept. of. ECE, GIET Engineering College, Vishakapatnam,
Nearest Clustering Algorithm for Satellite Image Classification in Remote Sensing Applications
 Nearest Clustering Algorithm for Satellite Image Classification in Remote Sensing Applications Anil K Goswami 1, Swati Sharma 2, Praveen Kumar 3 1 DRDO, New Delhi, India 2 PDM College of Engineering for
Nearest Clustering Algorithm for Satellite Image Classification in Remote Sensing Applications Anil K Goswami 1, Swati Sharma 2, Praveen Kumar 3 1 DRDO, New Delhi, India 2 PDM College of Engineering for
Optimal Design of a 6-DOF 4-4 Parallel Manipulator with Uncoupled Singularities
 Optimal Design of a 6-DOF 4-4 Parallel Manipulator with Uncoupled Singularities Júlia Borràs (1), Erika Ottaviano (2), Marco Ceccarelli (2) and Federico Thomas (1) (1) Institut de Robòtica i Informàtica
Optimal Design of a 6-DOF 4-4 Parallel Manipulator with Uncoupled Singularities Júlia Borràs (1), Erika Ottaviano (2), Marco Ceccarelli (2) and Federico Thomas (1) (1) Institut de Robòtica i Informàtica
[2] J. "Kinematics," in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.
![[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.](/thumbs/90/102406247.jpg "[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.") 92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
FPGA Implementation of Binary Quasi Cyclic LDPC Code with Rate 2/5
 FPGA Implementation of Binary Quasi Cyclic LDPC Code with Rate 2/5 Arulmozhi M. 1, Nandini G. Iyer 2, Anitha M. 3 Assistant Professor, Department of EEE, Rajalakshmi Engineering College, Chennai, India
FPGA Implementation of Binary Quasi Cyclic LDPC Code with Rate 2/5 Arulmozhi M. 1, Nandini G. Iyer 2, Anitha M. 3 Assistant Professor, Department of EEE, Rajalakshmi Engineering College, Chennai, India
Application of Geometry Rectification to Deformed Characters Recognition Liqun Wang1, a * and Honghui Fan2
 6th International Conference on Electronic, Mechanical, Information and Management (EMIM 2016) Application of Geometry Rectification to Deformed Characters Liqun Wang1, a * and Honghui Fan2 1 School of
6th International Conference on Electronic, Mechanical, Information and Management (EMIM 2016) Application of Geometry Rectification to Deformed Characters Liqun Wang1, a * and Honghui Fan2 1 School of
Design, Manufacturing and Kinematic Analysis of a Kind of 3-DOF Translational Parallel Manipulator
 4-27716195 mme.modares.ac.ir 2* 1-1 -2 - mo_taghizadeh@sbu.ac.ir, 174524155 * - - 194 15 : 195 28 : 195 16 : Design, Manufacturing and Kinematic Analysis of a Kind of -DOF Translational Parallel Manipulator
4-27716195 mme.modares.ac.ir 2* 1-1 -2 - mo_taghizadeh@sbu.ac.ir, 174524155 * - - 194 15 : 195 28 : 195 16 : Design, Manufacturing and Kinematic Analysis of a Kind of -DOF Translational Parallel Manipulator
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS
 DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
Improved Image Compression by Set Partitioning Block Coding by Modifying SPIHT
 Improved Image Compression by Set Partitioning Block Coding by Modifying SPIHT Somya Tripathi 1,Anamika Ahirwar 2 1 Maharana Pratap College of Technology, Gwalior, Madhya Pradesh 474006 2 Department of
Improved Image Compression by Set Partitioning Block Coding by Modifying SPIHT Somya Tripathi 1,Anamika Ahirwar 2 1 Maharana Pratap College of Technology, Gwalior, Madhya Pradesh 474006 2 Department of
J. Michael McCarthy. Type Synthesis. Gruebler s Equation, Assur Groups, Baranov Trusses, Graph Theory and Rigidity Theory
 J. Michael McCarthy Type Synthesis Gruebler s Equation, Assur Groups, Baranov Trusses, Graph Theory and Rigidity Theory Simple Machines The classification of machines was introduced during the Renaissance
J. Michael McCarthy Type Synthesis Gruebler s Equation, Assur Groups, Baranov Trusses, Graph Theory and Rigidity Theory Simple Machines The classification of machines was introduced during the Renaissance
Automatic Target Recognition in Cluttered Visible Imagery
 Journal of Computer Science, 9 (5): 572-582, 2013 ISSN 1549-3636 2013 doi:10.3844/jcssp.2013.572.582 Published Online 9 (5) 2013 (http://www.thescipub.com/jcs.toc) Automatic Target Recognition in Cluttered
Journal of Computer Science, 9 (5): 572-582, 2013 ISSN 1549-3636 2013 doi:10.3844/jcssp.2013.572.582 Published Online 9 (5) 2013 (http://www.thescipub.com/jcs.toc) Automatic Target Recognition in Cluttered