Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
|
|
|
- Roderick Moody
- 5 years ago
- Views:
Transcription

1 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 Robot Control Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
2 Robot Control Control of one joint motion: PID controller Control of the manipulator motion: Trajectory planning Motion control in joint space Motion control in operational space The Dexter Arm example: Mechanics, Kinematics, Control, Software interfaces
3 Scheme of a control system A control system provides a command in voltage or current to the actuators (motors) such that the joints reach a desired configuration Motor Encoder a Position Reference signal Control unit Reducer mot + mot - Power amplifier JOINT Power supply

4 Scheme of a control system Reducer Motor Encoder a Opposite-sign voltages produce opposite rotations of the motor mot + mot - JOINT


5 Scheme of a control system Encoder: sensor measuring joint rotations, either as an absolute or a relative value. The measurement is given in encoder steps Reducer: mechanism reducing the motor rotations with respect to the rotations of the axis mounted on the motor (ex. 1:k reduction) Power amplifier: it amplifies a reference signal into a power signal for moving the joint Control unit: unit producing the reference signal for the motor
6 Relations between joint position and encoder position : joint angular position (in degrees) : joint position in encoder steps k: motor reduction ratio R: encoder resolution (number of steps per turn) = θ 360 R k
7 Control of one joint motion Objective: move the joint from the current position i (in degrees) to the desired position f, in a time interval t : i f
8 Closed-loop (feedback) control The variable to control is measured and compared with the desired value The difference, or error, is processed by an algorithm The result of processing is the input value for the actuator Desired value + - e Control algorithm V Actuator Current position Sensor
9 PID control (Proportional, Integral, Derivative) It is a closed-loop control in which the error is processed with an algorithm including Proportional, Integral and Derivative components. The algorithm processes the error and provides an input to the actuator, with 3 components: Proportional, producing a correction proportional to the error; Integral, producing a correction given by the error integral in time; Derivative, producing a correction which is a function of the error first derivative. Not all closed-loop control systems use a PID algorithm
10 PID control (Proportional, Integral, Derivative) In a PID control system, the error is given to the control algorithm, which calculates the derivative and integral terms and the output signal V Desired value + - e PID V Actuator Current position Sensor
11 PID control (Proportional, Integral, Derivative) V K p e K d e K i e t dt e e d de dt a K p is the proportional gain or constant K i is the integral gain or constant K d is the derivative gain or constant e is the error, i.e. the difference between the desired position and the current position
12 PID control Proportional term The voltagev given to the motor is proportional to the difference between the actual position measured by the sensor and the desired position + d desired position - e K * e V Motor Robot a (actual position) Encoder
13 PID control Proportional term: The voltagev given to the motor is proportional to the difference between the actual position measured by the sensor and the desired position de e e dt t e K e K e K V p p d p i d p K P : proportional constant a d e
14 PID control Proportional term: system behaviour Desired position: 1 The motor oscillates before converging towards the desired position The system may settle without cancelling the error
15 PID control Derivative term: dt de e e dt t e K e K e K V p p d p i d p de e e dt t e K e K e K V p p a d p i d p Error derivative in time K d : derivative constant
16 PID control Proportional and derivative terms: Oscillation reductions Desired position: 1 Reduction of settlement time The system may settle without cancelling the error
17 PID control Integral terms: dt t e K e K i d Error integral in time K i : integral constant de e e dt t e K e K e K V a d i d p de e e dt t e K e K e K p p d p i d p
18 PID control Proportional and integral terms: Desired position: 1 The system settles and cancels the error
19 PID control Proportional, Integral and Derivative terms: V K p e K d e K i e t dt e p d a e p de dt
20 PID control Proportional, Integral and Derivative terms: K p, K d, K i constants are set empirically or with specific methods
21 Control of robot manipulator motion Objective: to have the robot arm moving from a starting position to a final position, both expressed in operational space coordinates In general, the control problem consists in finding the torues that the actuators have to give to the joints, so that the resulting arm motion follows a planned trajectory
22 Trajectory planning Objective: generate the reference inputs to the robot control system, which will ensure that the robot end effector will follow a desired trajectory when moving from x start to x f PATH: set of points, in joint space or operational space, that the robot has to reach in order to perform the desired movement TRAJECTORY: path with a specified time course (velocity and acceleration at each point)
23 Trajectory planning Objective: generate the reference inputs to the robot control system, which will ensure that the robot end effector will follow a desired trajectory when moving from x start to x f INPUT DATA: Path definition Path constraints Constraints given by the robot dynamics OUTPUT DATA: in joint space: joint trajectories in operational space: end-effector trajectory
24 the initial and final values of joint variables i and d the initial and final velocities the initial and final accelerations. Trajectories in joint space Between two points: the robot manipulator must be displaced from the initial to the final joint configuration, in a given time interval t. In order to give the time course of motion for each joint variable, we can choose a trapezoidal velocity profile or polynomial functions: Cubic polynom: it allows to set the initial and final values of joint variables i and d the initial and final velocities (usually null). Fifth-degree polynom: it allows to set
25 Trajectories in joint space Trapezoidal velocity profile: Constant acceleration in the starting phase Constant cruise velocity Constant deceleration in the arrival phase. The corresponding trajectory is mixed polynomial: a linear segment connected to parabolic parts in the neighbourhood of the initial and final positions.
26 Trapezoidal velocity profile Position Velocity Acceleration Note: velocities and accelerations at the initial and final times can be different from zero
27 Acceleration Velocity Position Trapezoidal velocity profile First phase: Second phase: Third phase:
28 Trajectory interpolation
29 Trajectories in operational space The trajectory planning algorithm generates the time course of motion of the end effector, according to a path of geometric characteristics defined in the operational space. The result of planning is a seuence of n-uples: (p(t),, (t), v(t), (t))
30 Robot kinematics and differential kinematics Kinematics x = k = k 1 x k = euations of direct kinematics Differential kinematics x = J() = J 1 ()x J() = Jacobian matrix x = x y z φ θ = o Velocity space
31 Robot kinematics and dynamics Robot dynamic model τ = B + C, + F v + g() τ = torue B = inertia term C = Coriolis term F v = friction coefficients g = gravity terms
32 Robot control Motion control can be done in joint space operational space
33 Motion control in joint space It can be used for moving the end-effector from x i to x d expressed in the operational space, without taking into account the trajectory followed by the end effector The final position x d is transformed in the corresponding final position in joint space d, by using the inverse kinematics transformation d = K -1 (x d ) All joints are moved from the current position i to the desired position d
34 Motion control in joint space The trajectory of the end effector in the operational space is not controlled and it is not predictable, due to the nonlinear effects of direct kinematics

35 General scheme of robot control in joint space
36 Motion control in joint space PD position control Diagonal matrix
37 Motion control in joint space PD position control
38 Motion control in joint space PD position control Setting the K p e K d parameter matrices: Fast response: high K p K d sets the best damping and guarantees a fast response without oscillations The K parameters needs to be set independently for each joint
39 Motion control in joint space PD position control with gravity compensation

40 Motion control in joint space based on inverse dynamics
41 Motion control in joint space based on inverse dynamics

42 Motion control in joint space based on inverse dynamics


43 Motion control in joint space based on inverse dynamics
44 Motion control in operational space In the movement from x i to x d the robot end effector follows a trajectory in the operational space, according to a planned time law. e.g. linear or curvilinear trajectory
45 Motion control in operational space To make the robot follow a trajectory (t, p(t), (t), v(t), (t)) To set joint velocities and accelerations in time, in order to reach the final desired position, expressed in Cartesian coordinates (Jacobian) To set voltages and currents to give to the motors in order to apply to the joints the velocities and the accelerations calculated with the Jacobian
46 Differential kinematics Set the relations between the joint velocities and the corresponding angular and linear velocities of the end effector. Such relations are decribed in a transformation matrix (Jacobian) which depends on the robot configuration.
47 Differential kinematics Geometric Jacobian = transformation matrix depending on the current robot configuration v p J J(). = geometric Jacobiano p = linear velocity of the end effector. = angular velocity of the end effector = joint velocity
48 Differential kinematics To find the joint velocities given the end effector velocity in operational space v p J p J 1 J -1 is the inverse Jacobian Integral numerical methods allows to find the vector from the vector of joint velocities

49 Motion control in operational space based on the transposed Jacobian matrix f = force at end effector
50 Motion control in operational space based on the inverse Jacobian matrix for small displacements
51 Motion control in operational space PD control with gravity compensation

52 Motion control in operational space based on inverse dynamics
53 Motion control in operational space p(t) Trajectory planning p f p(t) J -1 (p(t)) Joint velocities (t) p i Position in operational space, in time t. Velocity of the end effector, in time (t, p(t),, (t), p(t), (t)) t Joint velocities, in time J -1 (p(t)). (t, (t)) t

54 Force control Effect of external forces

55 Force control

56 Force control
57 Performance of a manipulator Payload: maximum load Velocity: maximum velocity in operational space Accuracy: difference between the position calculated by the control system and the actual position Repeatability: measure of the robot capability to reach the same position (function of the control system and algorithm, in addition to the robot characteristics)

58 KUKA KR 15/2 Dof: 6 Payload: 15 kg Max. reach: 1570 mm Repeatability: <± 0.1 mm Weight: 222 kg

59 PUMA 560 Dof: 6 Payload: 2 kg Velocity: 1.0 m/s Repeatability: <± 0.1 mm Weight: 120 lb = 55 Kg
60 Dexter Arm Cable actuated d.o.f.: 8 Workspace: 1200 mm x 350 Repeatability: ± 1mm Velocity: 0.2 m/s Payload: 2 Kg Weight: 40 Kg


61 Manus Cable actuated d.o.f.: 6 Velocity: 0.2 m/s Payload: 2 Kg Power: 24V DC Weight: 12 Kg
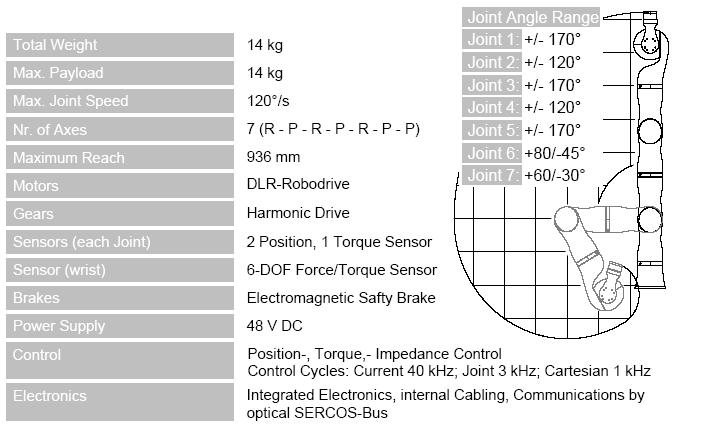

62 DLR Arm
63 The Dexter Arm
64 The Dexter Arm Workspace: 1200 mm x 350 Repeatability: + 1mm Velocity: 0.2 m/s Payload: 2 Kg D.o.f.: 8 Power: 24V DC Weight: 40 Kg
65 The Dexter Arm 8-d.o.f. anthropomorphic redundant robot arm, composed of trunk, shoulder, elbow and wrist designed for service applications and personal assistance in residential sites, such as houses or hospitals mechanically coupled structure: the mechanical transmission system is realized with pulleys and steel cables main characteristics: reduced accuracy,lighter mechanical structure, safe and intrinsically compliant structure
66 The Dexter arm Transmission system realized with pulleys and steel cables Joints J0 and J1 are actuated by motors and driving gear-boxes directly connected to the articulation axis Joints J2,..,J7 are actuated by DC-motors installed on link 1
67 Transmission #6
68 Transmissions #2-5 and 7

69 Anthropomorphic structure Wrist Elbow Shoulder Trunk
70 Kinematic Configuration x 2 x z 3 x 1 4 x 4 x 5 z 8 1 z 2 5 z 5 6 x 7 z 7 x 6 x 0 z 1 2 z 4 x 8 z 6 z 0 7
71 Denavit-Hartenberg Parameters Joint a i [mm] d i [mm] i [rad] i [rad] / / / / / / /
72 The Dexter Workspace
73 Joint Ranges
74 Control system PC Control CPU Axes control boards PID AD/DA converter Reference signals Power drivers Encoder signals Voltages to the motors Dexter (actuators and encoders)
75 Software architecture Command library Arm Controller ARM
76 Software interfaces Current position reading - In joint space: bool read_arm_ (double* ) : pointer to a 8-double array containing the arm position in joint degrees - In Cartesian space: bool read_arm_c (double* p) p: pointer to a 6-double array containing the end-effector position in mm and orientation in degrees, in Cartesian space
77 Software interfaces Motion commands - In joint space: bool move_arm_(double* ) : pointer to a 8-double array containing the arm position in joint degrees
78 Software interfaces Motion commands - In Cartesian space: bool move_arm_c7(double* p, double elbow, double J0, double velocity) p: pointer to a 6-double array containing the end-effector position in mm and orientation in degrees, in Cartesian space Elbow: elbow angle in degrees J0: final position of joint 0 Velocity: ratio of maximum velocity Kinematic inversion on 7 dof
79 Software interfaces Motion commands - In Cartesian space: bool move_arm_c(double* p, double elbow, double velocity) p: pointer to a 6-double array containing the end-effector position in mm and orientation in degrees, in Cartesian space Elbow: elbow angle in degrees Velocity: ratio of maximum velocity Kinematic inversion on 8 dof
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Automatic Control Industrial robotics
 Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Written exams of Robotics 1
 Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Prof. Fanny Ficuciello Robotics for Bioengineering Trajectory planning
 Trajectory planning to generate the reference inputs to the motion control system which ensures that the manipulator executes the planned trajectories path and trajectory joint space trajectories operational
Trajectory planning to generate the reference inputs to the motion control system which ensures that the manipulator executes the planned trajectories path and trajectory joint space trajectories operational
DESIGN AND MODELLING OF A 4DOF PAINTING ROBOT
 DESIGN AND MODELLING OF A 4DOF PAINTING ROBOT MSc. Nilton Anchaygua A. Victor David Lavy B. Jose Luis Jara M. Abstract The following project has as goal the study of the kinematics, dynamics and control
DESIGN AND MODELLING OF A 4DOF PAINTING ROBOT MSc. Nilton Anchaygua A. Victor David Lavy B. Jose Luis Jara M. Abstract The following project has as goal the study of the kinematics, dynamics and control
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
Hand. Desk 4. Panda research 5. Franka Control Interface (FCI) Robot Model Library. ROS support. 1 technical data is subject to change
 Robot Model Library. ROS support. 1 technical data is subject to change") TECHNICAL DATA 1, 2 Arm degrees of freedom 7 DOF payload 3 kg sensitivity joint torque sensors in all 7 axes maximum reach 855 mm joint position limits A1: -170/170, A2: -105/105, [ ] A3: -170/170, A4:
TECHNICAL DATA 1, 2 Arm degrees of freedom 7 DOF payload 3 kg sensitivity joint torque sensors in all 7 axes maximum reach 855 mm joint position limits A1: -170/170, A2: -105/105, [ ] A3: -170/170, A4:
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
A Bio-Inspired Sensory-Motor Neural Model for a Neuro-Robotic Manipulation Platform
 NEUROBOTICS Meeting Genova, September 22, 2005 A Bio-Inspired Sensory-Motor Neural Model for a Neuro-Robotic Manipulation Platform Gioel Asuni, Giancarlo Teti, Cecilia Laschi, Eugenio Guglielmelli and
NEUROBOTICS Meeting Genova, September 22, 2005 A Bio-Inspired Sensory-Motor Neural Model for a Neuro-Robotic Manipulation Platform Gioel Asuni, Giancarlo Teti, Cecilia Laschi, Eugenio Guglielmelli and
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS
 A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
Kinematic Model of Robot Manipulators
 Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
1 Trajectories. Class Notes, Trajectory Planning, COMS4733. Figure 1: Robot control system.
 Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics properties and performance measures @ 25 Redundancy first definition McKerrow When a manipulator can reach a specified position with more
Dipartimento di Elettronica Informazione e Bioingegneria Robotics properties and performance measures @ 25 Redundancy first definition McKerrow When a manipulator can reach a specified position with more
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Torque-Position Transformer for Task Control of Position Controlled Robots
 28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Torque-Position Transformer for Task Control of Position Controlled Robots Oussama Khatib, 1 Peter Thaulad,
28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 28 Torque-Position Transformer for Task Control of Position Controlled Robots Oussama Khatib, 1 Peter Thaulad,
autorob.github.io Inverse Kinematics UM EECS 398/598 - autorob.github.io
 autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Robotics I. March 27, 2018
 Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR
 SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
Theory and Design Issues of Underwater Manipulator
 Theory and Design Issues of Underwater Manipulator Irfan Abd Rahman, Surina Mat Suboh, Mohd Rizal Arshad Univesiti Sains Malaysia albiruni81@gmail.com, sue_keegurlz@yahoo.com, rizal@eng.usm.my Abstract
Theory and Design Issues of Underwater Manipulator Irfan Abd Rahman, Surina Mat Suboh, Mohd Rizal Arshad Univesiti Sains Malaysia albiruni81@gmail.com, sue_keegurlz@yahoo.com, rizal@eng.usm.my Abstract
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator robot
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
Trajectory Tracking Control of A 2-DOF Robot Arm Using Neural Networks
 The Islamic University of Gaza Scientific Research& Graduate Studies Affairs Faculty of Engineering Electrical Engineering Depart. الجبمعت اإلسالميت غزة شئىن البحث العلمي و الدراسبث العليب كليت الهندست
The Islamic University of Gaza Scientific Research& Graduate Studies Affairs Faculty of Engineering Electrical Engineering Depart. الجبمعت اإلسالميت غزة شئىن البحث العلمي و الدراسبث العليب كليت الهندست
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Forward kinematics and Denavit Hartenburg convention
 Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Robot. A thesis presented to. the faculty of. In partial fulfillment. of the requirements for the degree. Master of Science. Zachary J.
 Uncertainty Analysis throughout the Workspace of a Macro/Micro Cable Suspended Robot A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University In partial fulfillment
Uncertainty Analysis throughout the Workspace of a Macro/Micro Cable Suspended Robot A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University In partial fulfillment
State Estimation and Parameter Identification of Flexible Manipulators Based on Visual Sensor and Virtual Joint Model
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 State Estimation and Parameter Identification of Flexible Manipulators Based on Visual Sensor
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 State Estimation and Parameter Identification of Flexible Manipulators Based on Visual Sensor
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Design and Development of Cartesian Robot for Machining with Error Compensation and Chatter Reduction
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 6, Number 4 (2013), pp. 449-454 International Research Publication House http://www.irphouse.com Design and Development
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 6, Number 4 (2013), pp. 449-454 International Research Publication House http://www.irphouse.com Design and Development
Robotics 2 Information
 Robotics 2 Information Prof. Alessandro De Luca Robotics 2! 2017/18! Second semester! Monday, February 26 Wednesday, May 30, 2018! Courses of study (code)! Master in Artificial Intelligence and Robotics
Robotics 2 Information Prof. Alessandro De Luca Robotics 2! 2017/18! Second semester! Monday, February 26 Wednesday, May 30, 2018! Courses of study (code)! Master in Artificial Intelligence and Robotics
ISE 422/ME 478/ISE 522 Robotic Systems
 ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
A Geometric Approach to Inverse Kinematics of a 3 DOF Robotic Arm
 A Geometric Approach to Inverse Kinematics of a 3 DOF Robotic Arm Ayush Gupta 1, Prasham Bhargava 2, Ankur Deshmukh 3, Sankalp Agrawal 4, Sameer Chourika 5 1, 2, 3, 4, 5 Department of Electronics & Telecommunication,
A Geometric Approach to Inverse Kinematics of a 3 DOF Robotic Arm Ayush Gupta 1, Prasham Bhargava 2, Ankur Deshmukh 3, Sankalp Agrawal 4, Sameer Chourika 5 1, 2, 3, 4, 5 Department of Electronics & Telecommunication,
Trajectory planning in Cartesian space
 Robotics 1 Trajectory planning in Cartesian space Prof. Alessandro De Luca Robotics 1 1 Trajectories in Cartesian space! in general, the trajectory planning methods proposed in the joint space can be applied
Robotics 1 Trajectory planning in Cartesian space Prof. Alessandro De Luca Robotics 1 1 Trajectories in Cartesian space! in general, the trajectory planning methods proposed in the joint space can be applied
Control of industrial robots. Kinematic redundancy
 Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Singularity Handling on Puma in Operational Space Formulation
 Singularity Handling on Puma in Operational Space Formulation Denny Oetomo, Marcelo Ang Jr. National University of Singapore Singapore d oetomo@yahoo.com mpeangh@nus.edu.sg Ser Yong Lim Gintic Institute
Singularity Handling on Puma in Operational Space Formulation Denny Oetomo, Marcelo Ang Jr. National University of Singapore Singapore d oetomo@yahoo.com mpeangh@nus.edu.sg Ser Yong Lim Gintic Institute
PSO based Adaptive Force Controller for 6 DOF Robot Manipulators
 , October 25-27, 2017, San Francisco, USA PSO based Adaptive Force Controller for 6 DOF Robot Manipulators Sutthipong Thunyajarern, Uma Seeboonruang and Somyot Kaitwanidvilai Abstract Force control in
, October 25-27, 2017, San Francisco, USA PSO based Adaptive Force Controller for 6 DOF Robot Manipulators Sutthipong Thunyajarern, Uma Seeboonruang and Somyot Kaitwanidvilai Abstract Force control in
MDP646: ROBOTICS ENGINEERING. Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt. Prof. Said M.
 MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Theory of Robotics and Mechatronics
 Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Kinematics and dynamics analysis of micro-robot for surgical applications
 ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 5 (2009) No. 1, pp. 22-29 Kinematics and dynamics analysis of micro-robot for surgical applications Khaled Tawfik 1, Atef A.
ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 5 (2009) No. 1, pp. 22-29 Kinematics and dynamics analysis of micro-robot for surgical applications Khaled Tawfik 1, Atef A.
Dynamic Modeling of the 4 DoF BioRob Series Elastic Robot Arm for Simulation and Control
 Dynamic Modeling of the 4 DoF BioRob Series Elastic Robot Arm for Simulation and Control Thomas Lens, Jürgen Kunz, and Oskar von Stryk Simulation, Systems Optimization and Robotics Group, Technische Universität
Dynamic Modeling of the 4 DoF BioRob Series Elastic Robot Arm for Simulation and Control Thomas Lens, Jürgen Kunz, and Oskar von Stryk Simulation, Systems Optimization and Robotics Group, Technische Universität
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
FORCE CONTROL OF LINK SYSTEMS USING THE PARALLEL SOLUTION SCHEME
 FORCE CONTROL OF LIN SYSTEMS USING THE PARALLEL SOLUTION SCHEME Daigoro Isobe Graduate School of Systems and Information Engineering, University of Tsukuba 1-1-1 Tennodai Tsukuba-shi, Ibaraki 35-8573,
FORCE CONTROL OF LIN SYSTEMS USING THE PARALLEL SOLUTION SCHEME Daigoro Isobe Graduate School of Systems and Information Engineering, University of Tsukuba 1-1-1 Tennodai Tsukuba-shi, Ibaraki 35-8573,
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT
 Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017
 Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Properties of Hyper-Redundant Manipulators
 Properties of Hyper-Redundant Manipulators A hyper-redundant manipulator has unconventional features such as the ability to enter a narrow space while avoiding obstacles. Thus, it is suitable for applications:
Properties of Hyper-Redundant Manipulators A hyper-redundant manipulator has unconventional features such as the ability to enter a narrow space while avoiding obstacles. Thus, it is suitable for applications:
A New Algorithm for Measuring and Optimizing the Manipulability Index
 DOI 10.1007/s10846-009-9388-9 A New Algorithm for Measuring and Optimizing the Manipulability Index Ayssam Yehia Elkady Mohammed Mohammed Tarek Sobh Received: 16 September 2009 / Accepted: 27 October 2009
DOI 10.1007/s10846-009-9388-9 A New Algorithm for Measuring and Optimizing the Manipulability Index Ayssam Yehia Elkady Mohammed Mohammed Tarek Sobh Received: 16 September 2009 / Accepted: 27 October 2009
Drawing using the Scorbot-ER VII Manipulator Arm
 Drawing using the Scorbot-ER VII Manipulator Arm Luke Cole Adam Ferenc Nagy-Sochacki Jonathan Symonds cole@lc.homedns.org u2546772@anu.edu.au u3970199@anu.edu.au October 29, 2007 Abstract This report discusses
Drawing using the Scorbot-ER VII Manipulator Arm Luke Cole Adam Ferenc Nagy-Sochacki Jonathan Symonds cole@lc.homedns.org u2546772@anu.edu.au u3970199@anu.edu.au October 29, 2007 Abstract This report discusses
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Differential Kinematics. Robotics. Differential Kinematics. Vladimír Smutný
 Differential Kinematics Robotics Differential Kinematics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University in Prague
Differential Kinematics Robotics Differential Kinematics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University in Prague
Modeling and Control of 2-DOF Robot Arm
 International Journal of Emerging Engineering Research and Technology Volume 6, Issue, 8, PP 4-3 ISSN 349-4395 (Print) & ISSN 349-449 (Online) Nasr M. Ghaleb and Ayman A. Aly, Mechanical Engineering Department,
International Journal of Emerging Engineering Research and Technology Volume 6, Issue, 8, PP 4-3 ISSN 349-4395 (Print) & ISSN 349-449 (Online) Nasr M. Ghaleb and Ayman A. Aly, Mechanical Engineering Department,
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS
 KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
Design of a Three-Axis Rotary Platform
 Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Design of a Three-Axis Rotary Platform William Mendez, Yuniesky Rodriguez, Lee Brady, Sabri Tosunoglu Mechanics and Materials Engineering, Florida International University 10555 W Flagler Street, Miami,
Simulation. x i. x i+1. degrees of freedom equations of motion. Newtonian laws gravity. ground contact forces
 Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Inverse Kinematics of Robot Manipulators with Multiple Moving Control Points
 Inverse Kinematics of Robot Manipulators with Multiple Moving Control Points Agostino De Santis and Bruno Siciliano PRISMA Lab, Dipartimento di Informatica e Sistemistica, Università degli Studi di Napoli
Inverse Kinematics of Robot Manipulators with Multiple Moving Control Points Agostino De Santis and Bruno Siciliano PRISMA Lab, Dipartimento di Informatica e Sistemistica, Università degli Studi di Napoli
Modelling and Control of an Autonomous Underwater Vehicle for Mobile Manipulation
 Modelling and Control of an Autonomous Underwater Vehicle for Mobile Manipulation Benedetto Allotta, Roberto Conti, Riccardo Costanzi, Francesca Giardi, Enrico Meli, Alessandro Ridolfi University of Florence,
Modelling and Control of an Autonomous Underwater Vehicle for Mobile Manipulation Benedetto Allotta, Roberto Conti, Riccardo Costanzi, Francesca Giardi, Enrico Meli, Alessandro Ridolfi University of Florence,
AUTONOMOUS PLANETARY ROVER CONTROL USING INVERSE SIMULATION
 AUTONOMOUS PLANETARY ROVER CONTROL USING INVERSE SIMULATION Kevin Worrall (1), Douglas Thomson (1), Euan McGookin (1), Thaleia Flessa (1) (1)University of Glasgow, Glasgow, G12 8QQ, UK, Email: kevin.worrall@glasgow.ac.uk
AUTONOMOUS PLANETARY ROVER CONTROL USING INVERSE SIMULATION Kevin Worrall (1), Douglas Thomson (1), Euan McGookin (1), Thaleia Flessa (1) (1)University of Glasgow, Glasgow, G12 8QQ, UK, Email: kevin.worrall@glasgow.ac.uk
INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR
 INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR Mohammad Afif Ayob 1, Wan Nurshazwani Wan Zakaria 1, Jamaludin Jalani 2 and Mohd Razali Md Tomari 1 1 Advanced Mechatronics Research Group
INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR Mohammad Afif Ayob 1, Wan Nurshazwani Wan Zakaria 1, Jamaludin Jalani 2 and Mohd Razali Md Tomari 1 1 Advanced Mechatronics Research Group
Robotics 2 Visual servoing
 Robotics 2 Visual servoing Prof. Alessandro De Luca Visual servoing! objective use information acquired by vision sensors (cameras) for feedback control of the pose/motion of a robot (or of parts of it)
Robotics 2 Visual servoing Prof. Alessandro De Luca Visual servoing! objective use information acquired by vision sensors (cameras) for feedback control of the pose/motion of a robot (or of parts of it)
Joint level modelling, characterisation and torque control of the SHERPA robotic arm. J. (Jeroen) Jager. MSc Report
 Jager. MSc Report") Joint level modelling, characterisation and torque control of the SHERPA robotic arm J. (Jeroen) Jager MSc Report C e Prof.dr.ir. S. Stramigioli Dr. R. Carloni E. Barrett, MSc Dr.ir. R.G.K.M. Aarts August
Joint level modelling, characterisation and torque control of the SHERPA robotic arm J. (Jeroen) Jager MSc Report C e Prof.dr.ir. S. Stramigioli Dr. R. Carloni E. Barrett, MSc Dr.ir. R.G.K.M. Aarts August
A New Algorithm for Measuring and Optimizing the Manipulability Index
 A New Algorithm for Measuring and Optimizing the Manipulability Index Mohammed Mohammed, Ayssam Elkady and Tarek Sobh School of Engineering, University of Bridgeport, USA. Mohammem@bridgeport.edu Abstract:
A New Algorithm for Measuring and Optimizing the Manipulability Index Mohammed Mohammed, Ayssam Elkady and Tarek Sobh School of Engineering, University of Bridgeport, USA. Mohammem@bridgeport.edu Abstract:
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR
 www.arpnjournals.com INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR Mohammad Afif Ayob 1a, Wan Nurshazwani Wan Zakaria 1b, Jamaludin Jalani 2c, Mohd Razali Md Tomari 1d 1 ADvanced Mechatronics
www.arpnjournals.com INVERSE KINEMATICS ANALYSIS OF A 5-AXIS RV-2AJ ROBOT MANIPULATOR Mohammad Afif Ayob 1a, Wan Nurshazwani Wan Zakaria 1b, Jamaludin Jalani 2c, Mohd Razali Md Tomari 1d 1 ADvanced Mechatronics
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
ANALYTICAL MODEL OF THE CUTTING PROCESS WITH SCISSORS-ROBOT FOR HAPTIC SIMULATION
 Bulletin of the ransilvania University of Braşov Series I: Engineering Sciences Vol. 4 (53) No. 1-2011 ANALYICAL MODEL OF HE CUING PROCESS WIH SCISSORS-ROBO FOR HAPIC SIMULAION A. FRAU 1 M. FRAU 2 Abstract:
Bulletin of the ransilvania University of Braşov Series I: Engineering Sciences Vol. 4 (53) No. 1-2011 ANALYICAL MODEL OF HE CUING PROCESS WIH SCISSORS-ROBO FOR HAPIC SIMULAION A. FRAU 1 M. FRAU 2 Abstract:
MOTION TRAJECTORY PLANNING AND SIMULATION OF 6- DOF MANIPULATOR ARM ROBOT
 MOTION TRAJECTORY PLANNING AND SIMULATION OF 6- DOF MANIPULATOR ARM ROBOT Hongjun ZHU ABSTRACT:In order to better study the trajectory of robot motion, a motion trajectory planning and simulation based
MOTION TRAJECTORY PLANNING AND SIMULATION OF 6- DOF MANIPULATOR ARM ROBOT Hongjun ZHU ABSTRACT:In order to better study the trajectory of robot motion, a motion trajectory planning and simulation based
Trajectory Planning for Automatic Machines and Robots
 Luigi Biagiotti Claudio Melchiorri Trajectory Planning for Automatic Machines and Robots Springer 1 Trajectory Planning 1 1.1 A General Overview on Trajectory Planning 1 1.2 One-dimensional Trajectories
Luigi Biagiotti Claudio Melchiorri Trajectory Planning for Automatic Machines and Robots Springer 1 Trajectory Planning 1 1.1 A General Overview on Trajectory Planning 1 1.2 One-dimensional Trajectories
Lecture «Robot Dynamics»: Multi-body Kinematics
 Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
Lecture «Robot Dynamics»: Kinematics 3
 Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK
 ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
TRAJECTORY PLANNING OF FIVE DOF MANIPULATOR: DYNAMIC FEED FORWARD CONTROLLER OVER COMPUTED TORQUE CONTROLLER
 59 Military Technical College Kobry El-Kobbah, Cairo, Egypt. 7 th International Conference on Applied Mechanics and Mechanical Engineering. TRAJECTORY PLANNING OF FIVE DOF MANIPULATOR: DYNAMIC FEED FORWARD
59 Military Technical College Kobry El-Kobbah, Cairo, Egypt. 7 th International Conference on Applied Mechanics and Mechanical Engineering. TRAJECTORY PLANNING OF FIVE DOF MANIPULATOR: DYNAMIC FEED FORWARD