Stereo matching. Reading: Chapter 11 In Szeliski s book
|
|
|
- Dale Shields
- 6 years ago
- Views:
Transcription
1 Stereo matching Reading: Chapter 11 In Szeliski s book
2 Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20 Model fitting (RANSAC, EM, ) 6 Oct.27 Stereo Matching 7 Nov.3 2D Shape Matching 8 Nov.10 Segmentation 9 Nov.17 Shape from Silhouettes 10 Nov.24 Structure from motion 11 Dec.1 Optical Flow 12 Dec.8 Tracking (Kalman, particle filter) 13 Dec.15 Object category recognition 14 Dec.22 Specific object recognition


3 An Application: Mobile Robot Navigation The INRIA Mobile Robot, The Stanford Cart, H. Moravec, Courtesy O. Faugeras and H. Moravec.


4 NASA Mars Rover Stereo
5 Standard stereo geometry PointGrey Bumblebee pure translation along X-axis
6 Standard stereo geometry





7 Stereo: basic idea error depth
8 Stereo matching Search is limited to epipolar line (1D) Look for most similar pixel?

9 Stereopsis 9 Figure from US Navy Manual of Basic Optics and Optical Instruments, prepared by Bureau of Naval Personnel. Reprinted by Dover Publications, Inc., 1969.
10 Human Stereopsis: Reconstruction d=0 10 Disparity: d = r-l = D-F. In 3D, the horopter. d<0
11 11 Human Stereopsis: experimental horopter
12 Iso-disparity curves: planar retinas X i X j X 0 X 1 C 1 C 2 X 0 i : i 0 1 = i 1 : = i the retina act as if it were flat!
13 Human Stereopsis: Reconstruction What if F is not known? Helmoltz (1909): There is evidence showing the vergence angles cannot be measured precisely. Humans get fooled by bas-relief sculptures. There is an analytical explanation for this. Relative depth can be judged accurately. 13
14 Human Stereopsis: Binocular Fusion How are the correspondences established? Julesz (1971): Is the mechanism for binocular fusion a monocular process or a binocular one?? There is anecdotal evidence for the latter (camouflage). 14 Random dot stereograms provide an objective answer BP!



15 A Cooperative Model (Marr and Poggio, 1976) Excitory connections: continuity Inhibitory connections: uniqueness Iterate: C = Σ C - wσ C + C. e i 0 15 Reprinted from Vision: A Computational Investigation into the Human Representation and Processing of Visual Information by David Marr by David Marr. Reprinted by permission of Henry Holt and Company, LLC.
16 Correlation Methods (1970--) 16 Slide the window along the epipolar line until w.w is maximized. Normalized Correlation: minimize θ instead. 2 Minimize w-w.



17 Correlation Methods: Foreshortening Problems Solution: add a second pass using disparity estimates to warp the correlation windows, e.g. Devernay and Faugeras (1994). 17 Reprinted from Computing Differential Properties of 3D Shapes from Stereopsis without 3D Models, by F. Devernay and O. Faugeras, Proc. IEEE Conf. on Computer Vision and Pattern Recognition (1994) IEEE.
18 Multi-Scale Edge Matching (Marr, Poggio and Grimson, ) 18 Edges are found by repeatedly smoothing the image and detecting the zero crossings of the second derivative (Laplacian). Matches at coarse scales are used to offset the search for matches at fine scales (equivalent to eye movements).

19 Multi-Scale Edge Matching (Marr, Poggio and Grimson, ) Image Laplacian One of the two input images Zeros of the Laplacian 19 Reprinted from Vision: A Computational Investigation into the Human Representation and Processing of Visual Information by David Marr by David Marr. Reprinted by permission of Henry Holt and Company, LLC.
20 Multi-Scale Edge Matching (Marr, Poggio and Grimson, ) 20 Reprinted from Vision: A Computational Investigation into the Human Representation and Processing of Visual Information by David Marr by David Marr. Reprinted by permission of Henry Holt and Company, LLC.
21 Pixel Dissimilarity Absolute difference of intensities c= I1(x,y)- I2(x-d,y) Interval matching [Birchfield 98] Considers sensor integration Represents pixels as intervals 21
22 Alternative Dissimilarity Measures 22 Rank and Census transforms [Zabih ECCV94] Rank transform: Define window containing R pixels around each pixel Count the number of pixels with lower intensities than center pixel in the window Replace intensity with rank (0..R-1) Compute SAD on rank-transformed images Census transform: Use bit string, defined by neighbors, instead of scalar rank Robust against illumination changes

23 Rank and Census Transform Results Noise free, random dot stereograms Different gain and bias 23


24 Systematic Errors of Area-based Stereo Ambiguous matches in textureless regions Surface over-extension [Okutomi IJCV02] 24
25 Surface Over-extension Expected value of E[(xy) 2 ] for x in left and y in right image is: Case A: σ F2 + σ B2 +(μ F - μ B ) 2 for w/2-λ pixels in each row Left image Case B: 2 σ B2 for w/2+λ pixels in each row Disparity of back surface Right image 25

26 Surface Over-extension Discontinuity perpendicular to epipolar lines Left image Disparity of back surface Right image Discontinuity parallel to epipolar lines 26
27 Over-extension and shrinkage Turns out that: for discontinuities 6perpendicular 2 to epipolar lines And: w 2 λ w 2 w λ for discontinuities parallel to epipolar lines w 27


28 Random Dot Stereogram Experiments 28
29 Random Dot Stereogram Experiments 29


30 Offset Windows Equivalent to using min nearby cost Result: loss of depth accuracy 30

31 Discontinuity Detection Use offset windows only where appropriate Bi-modal distribution of SSD Pixel of interest different than mode within window 31
32 Compact Windows [Veksler CVPR03]: Adapt windows size based on: Average matching error per pixel Variance of matching error Window size (to bias towards larger windows) Pick window that minimizes cost 32
33 Integral Image A C B D Sum of shaded part Shaded area = A+D-B-C Independent of size Compute an integral image for pixel dissimilarity at each possible disparity 33

34 Results using Compact Windows 34

 Typically use 36")
35 Rod-shaped filters Instead of square windows aggregate cost in rod-shaped shiftable windows [Kim CVPR05] Search for one that minimizes the cost (assume that it is an iso-disparity curve) Typically use 36 orientations 35

36 Locally Adaptive Support Apply weights to contributions of neighboring pixels according to similarity and proximity [Yoon CVPR05] 36
37 Locally Adaptive Support Similarity in CIE Lab color space: Proximity: Euclidean distance Weights: 37

38 Locally Adaptive Support: Results Locally Adaptive Support 38

39 Locally Adaptive Support: Results 39
40 Cool ideas Space-time stereo (varying illumination, not shape) 40


41 Challenges Ill-posed inverse problem Recover 3-D structure from 2-D information Difficulties Uniform regions Half-occluded pixels 41

42 Occlusions (Slide from Pascal Fua)

43 Exploiting scene constraints
44 The Ordering Constraint In general the points are in the same order on both epipolar lines. But it is not always the case.. 44

45 Ordering constraint surface slice surface as a path occlusion left , ,3 6 2,3 1 occlusion right ,5 6
46 Uniqueness constraint In an image pair each pixel has at most one corresponding pixel In general one corresponding pixel In case of occlusion there is none
47 Disparity constraint surface slice surface as a path constant disparity surfaces bounding box use reconstructed features to determine bounding box
. Arcs = matched intervals along the epipolar lines.")
48 Dynamic Programming (Baker and Binford, 1981) Find the minimum-cost path going monotonically down and right from the top-left corner of the graph to its bottom-right corner. Nodes = matched feature points (e.g., edge points). Arcs = matched intervals along the epipolar lines. Arc cost = discrepancy between intervals. 48
 Discontinuities (prior) 49 (Cox et al.")
49 Stereo matching Similarity measure (SSD or NCC) Optimal path (dynamic programming ) Constraints epipolar ordering uniqueness disparity limit disparity gradient limit Trade-off Matching cost (data) Discontinuities (prior) 49 (Cox et al. CVGIP 96; Koch 96; Falkenhagen 97; Van Meerbergen,Vergauwen,Pollefeys,VanGool IJCV 02)
 50 Reprinted from")


50 Dynamic Programming (Ohta and Kanade, 1985) 50 Reprinted from Stereo by Intra- and Intet-Scanline Search, by Y. Ohta and T. Kanade, IEEE Trans. on Pattern Analysis and Machine Intelligence, 7(2): (1985) IEEE.


51 Hierarchical stereo matching Allows faster computation Deals with large disparity ranges Downsampling (Gaussian pyramid) Disparity propagation 51 (Falkenhagen 97;Van Meerbergen,Vergauwen,Pollefeys,VanGool IJCV 02)
52 Disparity map image I(x,y) Disparity map D(x,y) image I (x,y ) (x,y )=(x+d(x,y),y) 52





53 Example: reconstruct image from neighboring images 53
54
55 Semi-global optimization Optimize: E=E data +E( D p -D q =1)+E( D p - D q >1) [Hirshmüller CVPR05] Use mutual information as cost NP-hard using graph cuts or belief propagation (2-D optimization) Instead do dynamic programming along many directions Don t use visibility or ordering constraints Enforce uniqueness Add costs 55

56 56 Results of Semi-global optimization


57 Results of Semi-global optimization No. 1 overall in Middlebury evaluation (at 0.5 error threshold as of Sep. 2006) 57

58 Energy minimization (Slide from Pascal Fua)
59 Graph Cut (general formulation requires multi-way cut!) (Slide from Pascal Fua)

")
60 Simplified graph cut (Roy and Cox ICCV 98) (Boykov et al ICCV 99)

 first iteration per pixel +left")

61 Belief Propagation Belief of one node about another gets propagated through messages (full pdf, not just most likely state) first iteration per pixel +left +right +up +down subsequent iterations (adapted from J. Coughlan slides)
62
63 Rectification All epipolar lines are parallel in the rectified image plane. 63
64 Image pair rectification simplify stereo matching by warping the images Apply projective transformation so that epipolar lines correspond to horizontal scanlines e e = 0 He map epipole e to (1,0,0) try to minimize image distortion problem when epipole in (or close to) the image
65 Planar rectification (standard approach) ~ image size (calibrated) Bring two views to standard stereo setup (moves epipole to ) (not possible when in/close to image) Distortion minimization (uncalibrated) 65

66 66




67 67
 Polar re-parameterization around epipoles Requires only (oriented) epipolar geometry Preserve length of epipolar lines Choose θ so that no")
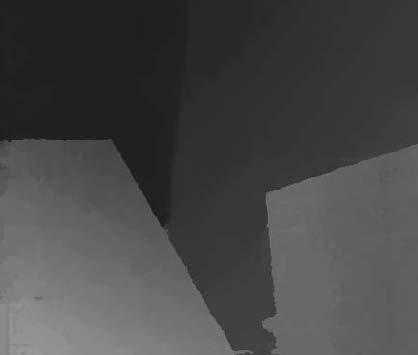
68 Polar rectification (Pollefeys et al. ICCV 99) Polar re-parameterization around epipoles Requires only (oriented) epipolar geometry Preserve length of epipolar lines Choose θ so that no pixels are compressed original image rectified image 68 Works for all relative motions Guarantees minimal image size


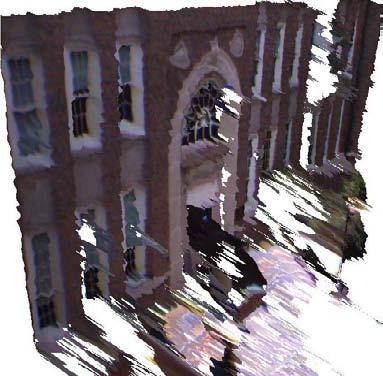
69 69 polar rectification: example


70 70 polar rectification: example


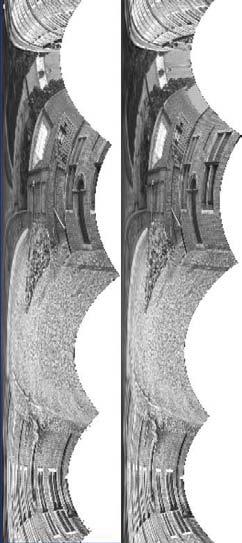
71 Example: Béguinage of Leuven Does not work with standard Homography-based approaches 71



72 72 Example: Béguinage of Leuven




73 General iso-disparity surfaces (Pollefeys and Sinha, ECCV 04) Example: polar rectification preserves disp. Application: Active vision Also interesting relation to human horopter
74 Reconstruction from Rectified Images 74 Disparity: d=u -u. Depth: z = -B/d.
75 Three Views The third eye can be used for verification.. 75
76 Choosing the stereo baseline all of these points project to the same pair of pixels width of a pixel Large Baseline Small Baseline What s the optimal baseline? Too small: large depth error Too large: difficult search problem, more occlusions

77 The Effect of Baseline on Depth Estimation (Okutami and Kanade PAMI 93)
78


:353-363")
79 I1 I2 I10 80 Reprinted from A Multiple-Baseline Stereo System, by M. Okutami and T. Kanade, IEEE Trans. on Pattern Analysis and Machine Intelligence, 15(4): (1993). \copyright 1993 IEEE.
80 Problem: visibility Some Solutions Multi-view linking (Koch et al. ECCV98) Best of left or right (Kang et al. CVPR01) Best k out of n,...
81 Variable Baseline/Resolution Stereo (Gallup et al., CVPR08) Multi-baseline, multi-resolution At each depth, baseline and resolution selected proportional to that depth Allows to keep depth accuracy constant!
82 Variable Baseline/Resolution Stereo: comparison


83 Multi-view depth fusion Compute depth for every pixel of reference image Triangulation Use multiple views Up- and down sequence Use Kalman filter (Koch, Pollefeys and Van Gool. ECCV 98) Allows to compute robust texture 84


84 Real-time stereo on graphics hardware Yang and Pollefeys CVPR03 Computes Sum-of-Square-Differences Hardware mip-map generation used to aggregate results over support region Trade-off between small and large support window Shape of a kernel for summing up 6 levels M disparity hypothesis/sec on Radeon 9700pro e.g. 512x512x20disparities at 30Hz


 (1x1+2x2)")
85 Combine multiple aggregation windows using hardware mipmap and multiple texture units in single pass (1x1) (1x1+2x2 +4x4+8x8) (1x1+2x2) (1x1+2x2 +4x4+8x8 +16x16) 87
; Yang et al.")
86 Plane-sweep multi-view matching Simple algorithm for multiple cameras no rectification necessary doesn t deal with occlusions Collins 96; Roy and Cox 98 (GC); Yang et al. 02/ 03 (GPU)





87 Fast GPU-based plane-sweeping stereo Plane-sweep multi-view depth estimation (Yang & Pollefeys, CVPR 03)

88 Plane Sweep Stereo Images Projected on Plane Plane Sweep Matching Score 90

89 Plane Sweep Stereo Result Ideal for GPU processing 512x384 depthmap, 50 planes, 5 images: 50 Hz 91


90 Plane Sweep Stereo Images Projected on Plane Plane Sweep Matching Score (SAD) 92
 Assumes all pixels in window are on the")
91 Window-Based Matching - Local Stereo Pixel-to-pixel matching is ambiguous for local stereo Use a matching window (SAD/SSD/NCC) Assumes all pixels in window are on the plane 93

 Select")

 Automatic")
92 Multi-directional plane-sweeping stereo (Gallup, Frahm & Pollefeys, CVPR07) Select best-cost over depths AND orientation 3D model from 11 video frames (hand-held) Automatic computations of dominant orientations



93 Plane Priors and Quicksweep Use SfM points as a prior for stereo P( π i ci ) P( ci π i ) P( π i ) without plane prior with plane prior For real-time: test only the planes with high prior probability






94 Selecting Best Depth / Surface Normal Combining multiple sweeps How to combine sweeps? Local best cost Sweep 1 Sweep 2 Sweep 3 OR Global labeling Graph Cut: 1-2 seconds Continuous Formulation: 45 ms (Zach, Gallup, Frahm, Niethammer VMV 2008)



95 Results 1474 frame reconstruction, 11 images in stereo, 512x384 grayscale, 48 plane hypotheses (quick sweep), processing rate 20.0 Hz (Nvidia 8800 GTX) 98
 O(n) Fast on GPU as key operation is rendering depth-maps into")
96 Fast visibility-based fusion of depth-maps (Merrell, Akbarzadeh, Wang, Mordohai, Frahm, Yang, Nister, Pollefeys ICCV07) Complements very fast multi-view stereo visibility constraints stability-based fusion Two fusion approaches confidence-based fusion O(n 2 ) O(n) Fast on GPU as key operation is rendering depth-maps into other views

 -")

97 Fast video-based modeling of cities Fast video processing pipeline - up to 26Hz on single CPU/GPU - Most image processing on GPU (x10-x100 faster) - Exploits urban structure - Generates textured 3D mesh (Pollefeys et al. IJCV, 2008) 100




98 3D-from-video evaluation: Firestone building building surveyed to 6mm cm cm cm cm cm cm RMS error: 13.4cm mean error: 6.8cm median error: 3.0cm cm error histogram 101






99 3D-from-video evaluation: Middlebury Multi-View Stereo Evaluation Benchmark Ring datasets: 47 images Results competitive but much, much faster (30 minutes 30 seconds) 102

100 1.3 million video frames (Chapel Hill, NC) 103
101 1.3 million frames (2 cams per side) 26 Hz reconstruction frame rate Computation time: 1PC (3Ghz CPU+ Nvidia 8800 GTX): 26fps 2 1fps 2.5 1fpm 104
: 14hrs @ 26fps 105")
102 1.3 million frames (2 cams per side) 26 Hz reconstruction frame rate Computation time: 1PC (3Ghz CPU+ Nvidia 8800 GTX): 26fps 105

103 106

104 Another Scene view view N 108




105 Depthmap view 1... reference... view view N 109

106 3D Model: Standard Stereo 110

107 3D Model: Standard Stereo 111

108 3D Model: Standard Stereo 112

109 3D Model: Standard Stereo 113
110 How Accurate Is Stereo? Δz z Δd b = baseline f = focal length d = disparity z = depth z = bf d bf z z' d = 2 d d d z 2 f z bf d b 114

111 Variable Baseline/Resolution Stereo (Gallup et al., CVPR08 Multi-baseline, multi-resolution At each depth, baseline and resolution selected proportional to that depth Allows to keep depth accuracy constant!
112 Verification of consistent results Analysis of matching scores at various baselines and scales Location of global minimum unchanged Value of global minimum preserved








113 Variable Baseline/Resolution Stereo: comparison

114 Results 138

115 Depth Resolution Limits 139



116 Piecewise Planar Stereo Fit planes to scene But also handle non-planar regions Use planar appearance Ensure consistency over video sequences 140


117 3D Reconstruction from Video Street-Side Video Real-Time Stereo 141

 Video")




118 Method (Gallup et al. CVPR 2010) Video Frame Depthmap with RANSAC planes Flowchart Planar Class Probability Map Graph-Cut Labeling 3D Model 142

119 149
 Enforces vertical facades One continuous surface, no holes")
120 Heightmap Model (Gallup et al. 3DPVT 2010) Enforces vertical facades One continuous surface, no holes 2.5D: Fast to compute, easy to store 150
")

121 Occupancy Voting voxel depth d V = exp( d / σ ) voxel V = λ empty This is a log-odds likelihood camera 151
122 n-layer heightmap fusion (Gallup et al. DAGM 10) Generalize to n-layer heightmap Each layer is a transition from full/empty or empty/full Compute layer positions with dynamic programming Use model selection (BIC) to determine number of layers 152


123 n-layer heightmap fusion Ric ICVSS








124 Reconstruction from Photo Collections Millions of images download from Flickr Camera poses computed using (Li et al. ECCV 08) Depthmaps from GPU planesweep 154
125 Results
126 More on stereo The Middleburry Stereo Vision Research Page Recommended reading D. Scharstein and R. Szeliski. A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms. IJCV 47(1/2/3):7-42, April-June PDF file (1.15 MB) - includes current evaluation. Microsoft Research Technical Report MSR-TR , November PDF file (1.27 MB). 15
127 Next week: 2D Shape Matching 25
7. The Geometry of Multi Views. Computer Engineering, i Sejong University. Dongil Han
 Computer Vision 7. The Geometry of Multi Views Computer Engineering, i Sejong University i Dongil Han THE GEOMETRY OF MULTIPLE VIEWS Epipolar Geometry The Stereopsis Problem: Fusion and Reconstruction
Computer Vision 7. The Geometry of Multi Views Computer Engineering, i Sejong University i Dongil Han THE GEOMETRY OF MULTIPLE VIEWS Epipolar Geometry The Stereopsis Problem: Fusion and Reconstruction
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Introduction à la vision artificielle X
 Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
Static Scene Reconstruction
 GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Announcements. Stereo Vision Wrapup & Intro Recognition
 Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Announcements. Stereo Vision II. Midterm. Example: Helmholtz Stereo Depth + Normals + BRDF. Stereo
 Announcements Stereo Vision II Introduction to Computer Vision CSE 15 Lecture 13 Assignment 3: Due today. Extended to 5:00PM, sharp. Turn in hardcopy to my office 3101 AP&M No Discussion section this week.
Announcements Stereo Vision II Introduction to Computer Vision CSE 15 Lecture 13 Assignment 3: Due today. Extended to 5:00PM, sharp. Turn in hardcopy to my office 3101 AP&M No Discussion section this week.
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Stereo Vision II: Dense Stereo Matching
 Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Announcements. Stereo
 Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Computer Vision I. Announcements. Random Dot Stereograms. Stereo III. CSE252A Lecture 16
 Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Computer Vision I. Announcement
 Announcement Stereo I HW3: Coming soon Stereo! CSE5A Lecture 3 Binocular Stereopsis: Mars Gien two images of a scene where relatie locations of cameras are known, estimate depth of all common scene points.
Announcement Stereo I HW3: Coming soon Stereo! CSE5A Lecture 3 Binocular Stereopsis: Mars Gien two images of a scene where relatie locations of cameras are known, estimate depth of all common scene points.
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Stereo Wrap + Motion. Computer Vision I. CSE252A Lecture 17
 Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Multi-View Geometry (Ch7 New book. Ch 10/11 old book)
") Multi-View Geometry (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/, Trevor
Multi-View Geometry (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/, Trevor
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Evaluation of Large Scale Scene Reconstruction
 Evaluation of Large Scale Scene Reconstruction Paul Merrell, Philippos Mordohai, Jan-Michael Frahm, and Marc Pollefeys Department of Computer Science University of North Carolina, Chapel Hill, USA Abstract
Evaluation of Large Scale Scene Reconstruction Paul Merrell, Philippos Mordohai, Jan-Michael Frahm, and Marc Pollefeys Department of Computer Science University of North Carolina, Chapel Hill, USA Abstract
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07. Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang
 CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
Gain Adaptive Real-Time Stereo Streaming
 Gain Adaptive Real-Time Stereo Streaming S. J. Kim +, D. Gallup +, J.-M. Frahm +, A. Akbarzadeh, Q. Yang, R. Yang, D. Nistér and M. Pollefeys + + Department of Computer Science Department of Computer Science
Gain Adaptive Real-Time Stereo Streaming S. J. Kim +, D. Gallup +, J.-M. Frahm +, A. Akbarzadeh, Q. Yang, R. Yang, D. Nistér and M. Pollefeys + + Department of Computer Science Department of Computer Science
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera
 Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
A Heightmap Model for Efficient 3D Reconstruction from Street-Level Video
 A Heightmap Model for Efficient 3D Reconstruction from Street-Level Video David Gallup 1, Jan-Michael Frahm 1 1 University of North Carolina Department of Computer Science {gallup,jmf}@cs.unc.edu Marc
A Heightmap Model for Efficient 3D Reconstruction from Street-Level Video David Gallup 1, Jan-Michael Frahm 1 1 University of North Carolina Department of Computer Science {gallup,jmf}@cs.unc.edu Marc
Stereo Matching. Stereo Matching. Face modeling. Z-keying: mix live and synthetic
 Stereo Matching Stereo Matching Given two or more images of the same scene or object, compute a representation of its shape? Computer Vision CSE576, Spring 2005 Richard Szeliski What are some possible
Stereo Matching Stereo Matching Given two or more images of the same scene or object, compute a representation of its shape? Computer Vision CSE576, Spring 2005 Richard Szeliski What are some possible
Real-Time Disparity Map Computation Based On Disparity Space Image
 Real-Time Disparity Map Computation Based On Disparity Space Image Nadia Baha and Slimane Larabi Computer Science Department, University of Science and Technology USTHB, Algiers, Algeria nbahatouzene@usthb.dz,
Real-Time Disparity Map Computation Based On Disparity Space Image Nadia Baha and Slimane Larabi Computer Science Department, University of Science and Technology USTHB, Algiers, Algeria nbahatouzene@usthb.dz,
Stereo imaging ideal geometry
 Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Real-time Global Stereo Matching Using Hierarchical Belief Propagation
 1 Real-time Global Stereo Matching Using Hierarchical Belief Propagation Qingxiong Yang 1 Liang Wang 1 Ruigang Yang 1 Shengnan Wang 2 Miao Liao 1 David Nistér 1 1 Center for Visualization and Virtual Environments,
1 Real-time Global Stereo Matching Using Hierarchical Belief Propagation Qingxiong Yang 1 Liang Wang 1 Ruigang Yang 1 Shengnan Wang 2 Miao Liao 1 David Nistér 1 1 Center for Visualization and Virtual Environments,
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Stereo Video Processing for Depth Map
 Stereo Video Processing for Depth Map Harlan Hile and Colin Zheng University of Washington Abstract This paper describes the implementation of a stereo depth measurement algorithm in hardware on Field-Programmable
Stereo Video Processing for Depth Map Harlan Hile and Colin Zheng University of Washington Abstract This paper describes the implementation of a stereo depth measurement algorithm in hardware on Field-Programmable
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
6.819 / 6.869: Advances in Computer Vision Antonio Torralba and Bill Freeman. Lecture 11 Geometry, Camera Calibration, and Stereo.
 6.819 / 6.869: Advances in Computer Vision Antonio Torralba and Bill Freeman Lecture 11 Geometry, Camera Calibration, and Stereo. 2d from 3d; 3d from multiple 2d measurements? 2d 3d? Perspective projection
6.819 / 6.869: Advances in Computer Vision Antonio Torralba and Bill Freeman Lecture 11 Geometry, Camera Calibration, and Stereo. 2d from 3d; 3d from multiple 2d measurements? 2d 3d? Perspective projection
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Real-Time Visibility-Based Fusion of Depth Maps
 Real-Time Visibility-Based Fusion of Depth Maps Paul Merrell 1, Amir Akbarzadeh 2, Liang Wang 2, Philippos Mordohai 1, David Nistér 2 and Marc Pollefeys 1 1 Department of Computer Science 2 Center for
Real-Time Visibility-Based Fusion of Depth Maps Paul Merrell 1, Amir Akbarzadeh 2, Liang Wang 2, Philippos Mordohai 1, David Nistér 2 and Marc Pollefeys 1 1 Department of Computer Science 2 Center for
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
IMAGE-BASED 3D ACQUISITION TOOL FOR ARCHITECTURAL CONSERVATION
 IMAGE-BASED 3D ACQUISITION TOOL FOR ARCHITECTURAL CONSERVATION Joris Schouteden, Marc Pollefeys, Maarten Vergauwen, Luc Van Gool Center for Processing of Speech and Images, K.U.Leuven, Kasteelpark Arenberg
IMAGE-BASED 3D ACQUISITION TOOL FOR ARCHITECTURAL CONSERVATION Joris Schouteden, Marc Pollefeys, Maarten Vergauwen, Luc Van Gool Center for Processing of Speech and Images, K.U.Leuven, Kasteelpark Arenberg
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Vision 3D articielle Disparity maps, correlation
 Vision 3D articielle Disparity maps, correlation Pascal Monasse monasse@imagine.enpc.fr IMAGINE, École des Ponts ParisTech http://imagine.enpc.fr/~monasse/stereo/ Contents Triangulation Epipolar rectication
Vision 3D articielle Disparity maps, correlation Pascal Monasse monasse@imagine.enpc.fr IMAGINE, École des Ponts ParisTech http://imagine.enpc.fr/~monasse/stereo/ Contents Triangulation Epipolar rectication
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
COMP 558 lecture 22 Dec. 1, 2010
 Binocular correspondence problem Last class we discussed how to remap the pixels of two images so that corresponding points are in the same row. This is done by computing the fundamental matrix, defining
Binocular correspondence problem Last class we discussed how to remap the pixels of two images so that corresponding points are in the same row. This is done by computing the fundamental matrix, defining
A novel 3D torso image reconstruction procedure using a pair of digital stereo back images
 Modelling in Medicine and Biology VIII 257 A novel 3D torso image reconstruction procedure using a pair of digital stereo back images A. Kumar & N. Durdle Department of Electrical & Computer Engineering,
Modelling in Medicine and Biology VIII 257 A novel 3D torso image reconstruction procedure using a pair of digital stereo back images A. Kumar & N. Durdle Department of Electrical & Computer Engineering,
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Image Guided Cost Aggregation for Hierarchical Depth Map Fusion
 Image Guided Cost Aggregation for Hierarchical Depth Map Fusion Thilo Borgmann and Thomas Sikora Communication Systems Group, Technische Universität Berlin {borgmann, sikora}@nue.tu-berlin.de Keywords:
Image Guided Cost Aggregation for Hierarchical Depth Map Fusion Thilo Borgmann and Thomas Sikora Communication Systems Group, Technische Universität Berlin {borgmann, sikora}@nue.tu-berlin.de Keywords: