ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
|
|
|
- Evelyn Watson
- 5 years ago
- Views:
Transcription

1 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" "
2 Announcements" First homework grading is done! Second homework is due next Tuesday! Third homework will be due Feb 8; combines material on outlier detection and egomotion! (Next quarter)! lhm - 2

3 Recap and Where Weʼre Going: 1 st Module (Done)" Image formation, cameras, and camera calibration! Illumination and radiometry! Sources of light sunlight, thermal emission, night sky glow! Propagation of light reflection from surfaces, attenuation in media! Cameras! Basic optics! Camera architectures! Image detectors materials, architectures, performance, for various regions of the EM spectrum! Geometric camera modeling and calibration! lhm - 3


4 Recap and Where Weʼre Going: 2 nd Module (Midway Through)" Visual motion estimation and 3-D perception! Low-level image processing! Feature detection, matching, and outlier detection! Pose estimation (egomotion) and visual odometry! Dense range imaging with stereo vision! Other range sensors, range data analysis, introduction to robots! 1-week mini-project on visual localization using a stereo camera head to match landmark points!? lhm - 4
5 Recap and Where Weʼre Going: 3 rd Module" State estimation, localization, and mapping! Introduction to estimation! Linear Kalman filter! Extended Kalman filter! Particle filters and the UKF! Simultaneous localization and mapping! 1-week mini-project on stereo-based SLAM for localization and occupancy grid mapping with ladar! lhm - 5
6 This Lecture" Point operators! Neighborhood operators! Edge detection! Image pyramids! Geometric image transformations! Reading material:! Today: Szeliski ch. 3 and sections ! Next Tuesday: Szeliski ch. 11! lhm - 6
 y")

!")


7 Images as Functions" f(x,y) y Interpret image either as:! Continuous image f(x,y)! Discrete array f[x,y]! Images are affected by:! Noise! Nonlinear distortions of intensity and geometry! x lhm - 7
8 Image Noise" lhm - 8

9 Image Distortions" lhm - 9
10 Point Operators" Output pixel = function of one input pixel in one or more images! g(x) = h(f(x)) or g(x) = h(f 0 (x),..., f n (x)) g(i, j) = h(f(i, j)) Examples! Monadic linear: bias and gain adjustment,! g(x) = a f(x) + b Monadic nonlinear: gamma correction,! Dyadic linear: image blending,! g(x) = [f(x)] 1/ϒ g(x) = (1 - α) f 0 (x) + α f 1 (x) lhm - 10
) g(i, j) = h(f(i, j)) g(x) = a f(x) + b g(x) = [f(x)] 1/ϒ g(x) = (1 - α) f 0 (x) +")
11 Point Operators: Histogram Equalization" g(x) = h(f(x)) or g(x) = h(f 0 (x),..., f n (x)) g(i, j) = h(f(i, j)) g(x) = a f(x) + b g(x) = [f(x)] 1/ϒ g(x) = (1 - α) f 0 (x) + α f 1 (x) lhm - 11
12 Point Operators: Color Space Conversion (e.g. RGB to HSV)" HSV(i, j) = f ( RGB(i, j) ) lhm - 12



13 Application of Color Space Conversion: Simple Segmentation" (a) (b) (c) (d) lhm - 13
14 Neighborhood Operators (or Window Operators, or Local Operators)" Slide one small window of numbers over the image and compute some function, replacing the central pixel in the image with the output of the function.! lhm - 14
15 Linear Filters" h() is called the filter, or kernel, or mask; entries in h() are the filter coefficients. Abbreviated notation:! Can also be written:! Correlation! Convolution! lhm - 15
16 Some Basic Properties of Convolution" Commutative:! f * g = g * f! Associative:! f * (g * h) = (f * g) * h! Distributes over addition:! Differentiation:! Shift invariant! f * (g + h) = f * g + f * h! (f * g)ʼ = fʼ * g = f * gʼ! lhm - 16
17 Neighborhood Operators: Border Effects" When applying convolution with a KxK kernel, the result is undefined for pixels closer than K pixels to the border of the image! Options:! Warp around! Expand/Pad! Crop! K lhm - 17
18
19 Kernel: 1/9 1/9 1/9 1/9 1/9 1/9 1/9 1/9 1/9
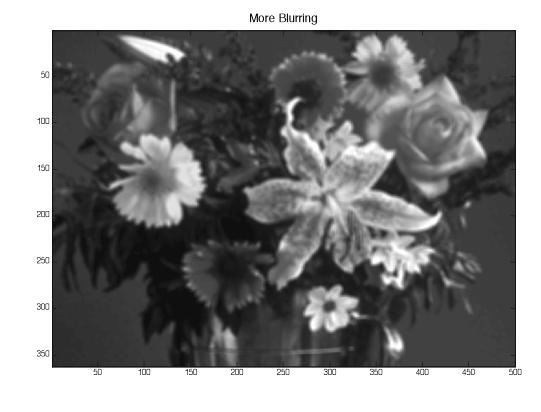
20 Kernel:
21 Kernel: 15 x 15 matrix of value 1/225

22 1-D: 2-D: Slight abuse of notations: We ignore the normalization constant such that
23 , σ = 5 Kernel:

24 Simple Averaging Gaussian Smoothing
25 Image Noise



26 Gaussian Smoothing to Remove Noise No smoothing σ = 2 σ = 4
27 Computational Issues for Filters: Separability and Moving Averages" When a KxK filter is equivalent to a Kx1 and a 1xK filter! Reduces number of multiplies from K 2 to 2K! For box filter, moving average makes cost independent of K! lhm - 27

28 Some Other (Nonlinear) Neighborhood Operators: Median Filter" Replace center pixel of KxK window with the mean value of all pixels in the window! Good for removing large noise spikes without blurring image! Original image! Gaussian filtered! Median filtered! lhm - 28

29 Some Other (Nonlinear) Neighborhood Operators: Bilateral Filter for Edge-Preserving Smoothing" 4-Jan-2011 ME/CS 132 lhm - 29


30 Some Other (Nonlinear) Neighborhood Operators: Bilateral Filter for Edge-Preserving Smoothing" Original image! 15x15 box filter! 15x15 bilateral filter! lhm - 30


31 Other Useful Neighborhood Operators: Feature Detectors (Recall Earlier Lecture)" (Implementation note: moving averages)! lhm - 31
 vs. sum absolute difference (SAD)! Normalization: why? Many approaches.")
32 Other Useful Neighborhood Operators: Image Matching (Recall Earlier Lecture)" Sum squared difference (SSD) vs. sum absolute difference (SAD)! Normalization: why? Many approaches.! lhm - 32



33 Other Useful Neighborhood Operators" Morphology! Distance transform! Connected components! lhm - 33
34 Edge Detection: What is an Edge?" Local maxima of rate of change of intensity! lhm - 34
35 Origin of Edges" surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Many factors! Sometimes care which factor applies; sometimes can determine that! lhm - 35
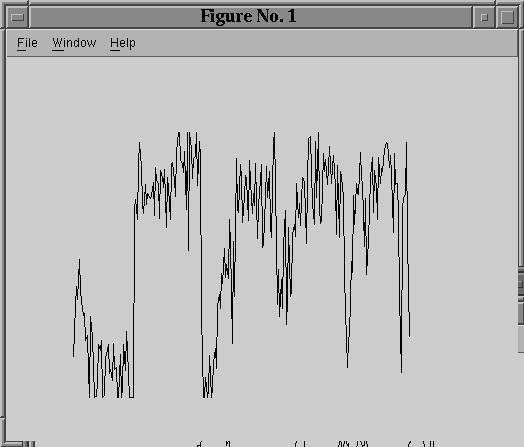
36 Image Derivatives: 1-D Case" We want to compute, at each pixel (x,y) the derivatives:! In the discrete case we could take the difference between the left and right pixels:! Convolution of the image by! Problem: Increases noise! Difference between Actual image values True difference (derivative) Twice the amount of noise as in the original image lhm - 36

37 Edges in 1-D: Effects of Noise" Where is the edge?! lhm - 37
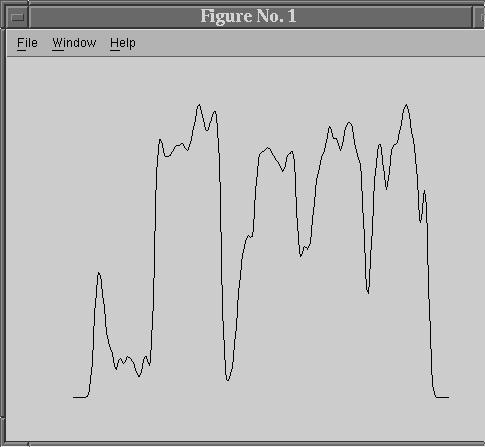
38 Solution: Smooth First" f (x) h(x) h f x (h f ) Where is the edge? Look for peaks in! x (h f ) lhm - 38
39 Derivative Property of Convolution: Saves One Step" x (h f ) = x h f f (x) x h x h f lhm - 39
40 Laplacian of Gaussian" f (x) 2 x 2 h 2 x h f 2 4-Jan-2011 Where is the edge? Zero crossing ME/CS 132 of bottom graph! lhm - 40

41 2-D Edge Detection Filters" Laplacian of Gaussian Gaussian derivative of Gaussian is the Laplacian operator: lhm - 41
42 DOG Approximation to LOG" lhm - 42
43 The Effect of Scale on Edge Detection" larger σ larger σ Scale space (Witkin 83) lhm - 43


44 θ Edge pixels are at local maxima of gradient magnitude Gradient computed by convolution with Gaussian derivatives Gradient direction is always perpendicular to edge direction




45 Applying the Gradient Magnitude Operator" I lhm - 45
! Linking!")
46 Different Thresholds Applied" to the Gradient Magnitude" Additional steps:! Thresholding with hysteresis! Thinning (non-maximum suppression)! Linking! lhm - 46
47 Sampling an Image" Examples of GOOD sampling! lhm - 47
48 Undersampling and Aliasing" Examples of BAD sampling -> Aliasing! lhm - 48

49 Downsampling and Aliasing" Sample every other pixel to go left to right! lhm - 49

50 Downsampling with Smoothing (Gaussian, 1 Sigma)" Sample every other pixel to go left to right! lhm - 50

51 Downsampling with Smoothing (Gaussian, 1.4 Sigma)" Sample every other pixel to go left to right! How do you know how much to smooth, with what kind of filter? Fourier transform theory.! lhm - 51
52 Intuitive Introduction to Fourier Transforms" lhm - 52




53 Intuition for Two Dimensions" dot = A measure of image content at this frequency and orientation lhm - 53

54 Multiresolution Image Representations" Known as a Gaussian Pyramid [Burt and Adelson, 1983]" Gaussian Pyramids have all sorts of applications in computer vision! lhm - 54
55 Gaussian Pyramid Construction" filter kernel Repeat! Filter! Subsample! Until minimum resolution reached! can specify desired number of levels (e.g., 3-level pyramid)! The whole pyramid is only 4/3 the size of the original image! lhm - 55

56 Computer Vision - A Modern Approach Set: Pyramids and Texture Slides by D.A. Forsyth
57 Laplacian Pyramid Construction" Given input I Construct Gaussian pyramid I G 1,..,I G n Take the difference between consecutive levels:! I L k = I G k I G k-1 Image I L k is an approximation of the Laplacian at scale number k Laplacian is a band-pass filter: Both high frequencies (edges and noise) and low frequencies (slow variations of intensity across the image)! lhm - 57

58 Computer Vision - A Modern Approach Set: Pyramids and Texture Slides by D.A. Forsyth


59 Another Example" lhm - 59

60 Geometric Image Transformations (e.g. Barrel Distortion Correction, Rectification)" lhm - 60
61 Geometric Image Transformations (e.g. Barrel Distortion Correction, Rectification)" lhm - 61
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
CS 4495 Computer Vision. Linear Filtering 2: Templates, Edges. Aaron Bobick. School of Interactive Computing. Templates/Edges
 CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
Edge Detection (with a sidelight introduction to linear, associative operators). Images
. Images") Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Prof. Feng Liu. Winter /15/2019
 Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Lecture: Edge Detection
 CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
Edge Detection Lecture 03 Computer Vision
 Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks Computer Vision James Hays, Brown Slides: Hoiem and others Reminder Project due Friday Fourier Bases Teases away fast vs. slow changes in the image. This change
Templates, Image Pyramids, and Filter Banks Computer Vision James Hays, Brown Slides: Hoiem and others Reminder Project due Friday Fourier Bases Teases away fast vs. slow changes in the image. This change
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge Detection. Today s reading. Cipolla & Gee on edge detection (available online) From Sandlot Science
 From Sandlot Science") Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Filtering Applications & Edge Detection. GV12/3072 Image Processing.
 Filtering Applications & Edge Detection GV12/3072 1 Outline Sampling & Reconstruction Revisited Anti-Aliasing Edges Edge detection Simple edge detector Canny edge detector Performance analysis Hough Transform
Filtering Applications & Edge Detection GV12/3072 1 Outline Sampling & Reconstruction Revisited Anti-Aliasing Edges Edge detection Simple edge detector Canny edge detector Performance analysis Hough Transform
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
What will we learn? Neighborhood processing. Convolution and correlation. Neighborhood processing. Chapter 10 Neighborhood Processing
 What will we learn? Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 10 Neighborhood Processing By Dr. Debao Zhou 1 What is neighborhood processing and how does it differ from point
What will we learn? Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 10 Neighborhood Processing By Dr. Debao Zhou 1 What is neighborhood processing and how does it differ from point
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Review of Filtering. Filtering in frequency domain
 Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert image and filter to fft (fft2
Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert image and filter to fft (fft2
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
CPSC 425: Computer Vision
 CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami
 Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Computer Vision I - Basics of Image Processing Part 1
 Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
Classification of image operations. Image enhancement (GW-Ch. 3) Point operations. Neighbourhood operation
 Point operations. Neighbourhood operation") Image enhancement (GW-Ch. 3) Classification of image operations Process of improving image quality so that the result is more suitable for a specific application. contrast stretching histogram processing
Image enhancement (GW-Ch. 3) Classification of image operations Process of improving image quality so that the result is more suitable for a specific application. contrast stretching histogram processing
Announcements. Edge Detection. An Isotropic Gaussian. Filters are templates. Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3.
 Announcements Edge Detection Introduction to Computer Vision CSE 152 Lecture 9 Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3. Reading from textbook An Isotropic Gaussian The picture
Announcements Edge Detection Introduction to Computer Vision CSE 152 Lecture 9 Assignment 2 on tracking due this Friday Midterm: Tuesday, May 3. Reading from textbook An Isotropic Gaussian The picture
Neighborhood operations
 Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Image processing. Reading. What is an image? Brian Curless CSE 457 Spring 2017
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
Image gradients and edges April 11 th, 2017
 4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April 10 th, 2018
 Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Lecture 4: Image Processing
 Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
Computer Vision: 4. Filtering. By I-Chen Lin Dept. of CS, National Chiao Tung University
 Computer Vision: 4. Filtering By I-Chen Lin Dept. of CS, National Chiao Tung University Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth and Jean Ponce,
Computer Vision: 4. Filtering By I-Chen Lin Dept. of CS, National Chiao Tung University Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth and Jean Ponce,
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Edge Detection CSC 767
 Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
CPSC 425: Computer Vision
 1 / 92 CPSC 425: Computer Vision Instructor: Jim Little little@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2016/2017 Term 2 2 / 92 Menu February 14, 2017 Topics:
1 / 92 CPSC 425: Computer Vision Instructor: Jim Little little@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2016/2017 Term 2 2 / 92 Menu February 14, 2017 Topics:
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Final Exam Study Guide CSE/EE 486 Fall 2007
 Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Filters and Pyramids. CSC320: Introduction to Visual Computing Michael Guerzhoy. Many slides from Steve Marschner, Alexei Efros
 Filters and Pyramids Wassily Kandinsky, "Accent in Pink" Many slides from Steve Marschner, Alexei Efros CSC320: Introduction to Visual Computing Michael Guerzhoy Moving Average In 2D What are the weights
Filters and Pyramids Wassily Kandinsky, "Accent in Pink" Many slides from Steve Marschner, Alexei Efros CSC320: Introduction to Visual Computing Michael Guerzhoy Moving Average In 2D What are the weights
Filtering and Edge Detection. Computer Vision I. CSE252A Lecture 10. Announcement
 Filtering and Edge Detection CSE252A Lecture 10 Announcement HW1graded, will be released later today HW2 assigned, due Wed. Nov. 7 1 Image formation: Color Channel k " $ $ # $ I r I g I b % " ' $ ' = (
Filtering and Edge Detection CSE252A Lecture 10 Announcement HW1graded, will be released later today HW2 assigned, due Wed. Nov. 7 1 Image formation: Color Channel k " $ $ # $ I r I g I b % " ' $ ' = (
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
DIGITAL IMAGE PROCESSING
 The image part with relationship ID rid2 was not found in the file. DIGITAL IMAGE PROCESSING Lecture 6 Wavelets (cont), Lines and edges Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion
The image part with relationship ID rid2 was not found in the file. DIGITAL IMAGE PROCESSING Lecture 6 Wavelets (cont), Lines and edges Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion
2D Image Processing INFORMATIK. Kaiserlautern University. DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
 2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
What is an edge? Paint. Depth discontinuity. Material change. Texture boundary
 EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Tracking Computer Vision Spring 2018, Lecture 24
 Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
EECS 556 Image Processing W 09. Image enhancement. Smoothing and noise removal Sharpening filters
 EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Biomedical Image Analysis. Spatial Filtering
 Biomedical Image Analysis Contents: Spatial Filtering The mechanics of Spatial Filtering Smoothing and sharpening filters BMIA 15 V. Roth & P. Cattin 1 The Mechanics of Spatial Filtering Spatial filter:
Biomedical Image Analysis Contents: Spatial Filtering The mechanics of Spatial Filtering Smoothing and sharpening filters BMIA 15 V. Roth & P. Cattin 1 The Mechanics of Spatial Filtering Spatial filter:
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
An introduction to 3D image reconstruction and understanding concepts and ideas
 Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition)
") Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition) Outline Measuring frequencies in images: Definitions, properties Sampling issues Relation with Gaussian
Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition) Outline Measuring frequencies in images: Definitions, properties Sampling issues Relation with Gaussian
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Introduction to Computer Vision. Week 3, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
All good things must...
 Lecture 17 Final Review All good things must... UW CSE vision faculty Course Grading Programming Projects (80%) Image scissors (20%) -DONE! Panoramas (20%) - DONE! Content-based image retrieval (20%) -
Lecture 17 Final Review All good things must... UW CSE vision faculty Course Grading Programming Projects (80%) Image scissors (20%) -DONE! Panoramas (20%) - DONE! Content-based image retrieval (20%) -
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
Outlines. Medical Image Processing Using Transforms. 4. Transform in image space
 Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
Image gradients and edges
 Image gradients and edges April 7 th, 2015 Yong Jae Lee UC Davis Announcements PS0 due this Friday Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April 7 th, 2015 Yong Jae Lee UC Davis Announcements PS0 due this Friday Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic