Plane-Based Content-Preserving Warps for Video Stabilization
|
|
|
- Russell Felix Cole
- 6 years ago
- Views:
Transcription
1 Plane-Based Content-Preserving Warps for Video Stabilization Zihan Zhou University of Illinois at Urbana-Champaign Hailin Jin Adobe Systems Inc. Yi Ma Microsoft Research Asia Abstract Recently, a new image deformation technique called content-preserving warping (CPW) has been successfully employed to produce the state-of-the-art video stabilization results in many challenging cases. The key insight of CPW is that the true image deformation due to viewpoint change can be well approximated by a carefully constructed warp using a set of sparsely constructed 3D points only. However, since CPW solely relies on the tracked feature points to guide the warping, it works poorly in large textureless regions, such as ground and building interiors. To overcome this limitation, in this paper we present a hybrid approach for novel view synthesis, observing that the textureless regions often correspond to large planar surfaces in the scene. Particularly, given a jittery video, we first segment each frame into piecewise planar regions as well as regions labeled as non-planar using Markov random fields. Then, a new warp is computed by estimating a single homography for regions belong to the same plane, while inheriting results from CPW in the non-planar regions. We demonstrate how the segmentation information can be efficiently obtained and seamlessly integrated into the stabilization framework. Experimental results on a variety of real video sequences verify the effectiveness of our method. 1. Introduction With the fast development of hand-held digital cameras, we have seen a dramatic increase in the amount of amateur videos shot over the past decade. However, very often people find their videos hard to watch, mainly due to the excessive amount of shake and undirected camera motions in the footage. Therefore, there has been an urgent demand in developing high-quality video stabilization algorithms, which are able to remove the undesirable jitters from amateur videos so that they look like to be taken under smooth, directed camera paths. In general, there are two major steps in stabilizing a jittery input video, namely (1) designing new smooth camera paths, and (2) synthesizing stabilized video frames according to the new path. In this paper, we focus ourselves on the second step, which still remains a highly challenging problem nowadays. Most existing methods [19, 10, 6, 15, 13] apply a full-frame 2D transformation to each input frame to obtain the stabilized output frame. Despite its computational efficiency and robustness, this approach is wellknown for its inability in handling the parallax effects of a non-degenarate scene and camera motion, as illustrated in Figure 1 (first row). In fact, in the ideal case one will need the dense 3D structures of the scene in order to create a novel view of it. However, obtaining such a dense reconstruction from 2D images is extremely challenging in terms of both effectiveness and efficiency. Several attempts have been made along this direction [5, 7, 3], which rely on image-based rendering (IBR) to generate new images of a scene as seen along the smooth camera path. But these techniques are all limited to static scenes, among other issues. In a recent work [16], Liu et al. propose a novel method, namely contentpreserving warping (CPW), which instead uses the sparse 3D points obtained by any structure from motion system for synthesis. The key idea of CPW is that the true dense deformation can be well approximated by diffusing the sparse displacements suggested by the reconstructed 3D points via a carefully chosen regularization term. This approximation is shown to be sufficient for stabilization, producing stateof-the-art results in many challenging cases, as long as there are enough feature tracks in each image region. In practice, however, large textureless regions often exist in the scene, such as ground, building facades, and indoor walls, where feature tracks are rare. It has been noticed that CPW performs poorly in these regions, as illustrated in Figure 1 (second row). In this paper, we propose a new synthesizing scheme which aims to remedy this important issue of CPW. Our key observation is that real scenes often exhibit strong structural regularities, in the form of one or more planar surfaces, which are largely ignored so far by existing methods. More importantly, these planar surfaces typically correspond to the textureless regions in the scene, which are problematic to CPW as well as many other methods.
 is too rigid to handle general motion and structures, resulting in large distortions in non-planar regions (e.g., buildings).")

 planar surfaces in the scene.")



2 Figure 1. Effects of various warping methods. Each row shows a sequences of warps of a single input frame created by pulling the camera away from its original location. First row: Warping based on 2D transformation (e.g., homography) is too rigid to handle general motion and structures, resulting in large distortions in non-planar regions (e.g., buildings). Second row: Content-preserving warping preserves the non-planar structures well, but yields increasingly visible distortion in the textureless regions (i.e., the ground) where features are rare. Third row: Our plane-based warping is able to produce visual-pleasing results by combining the strengths of both methods. Red line represents the boundary of planar and non-planar regions obtained by our video segmentation algorithm. Therefore, our goal is to develop a novel 3D stabilization method that can explicitly take advantage of the presence of (relatively large) planar surfaces in the scene. To this end, we propose to automatically detect large planes in the scene, and partition each frame into regions associated with each plane, as well as regions that are non-planar. Note that, since our ultimate goal is to improve the stabilization system and produce jitter-free videos, it is crucial for our segmentation algorithm to process the entire video in a short period of time, and obtain results which can be seamlessly integrated into the stabilization pipeline. To achieve this goal, we develop a novel algorithm which directly works on the same uniform grid mesh that is employed by CPW, and only uses geometric cues for fast processing. This is contrary to the existing piecewise planar scene segmentation algorithms, which operate at the per-pixel level and rely on multiple low-level and high-level photometric cues. These methods are generally too slow for stabilization purpose, taking hours to process a video with a few hundred frames. We demonstrate that our algorithm is capable of processing the entire video in about 30 seconds, and obtaining results that are sufficient for stabilization. With the segmentation information, our new plane-based warping method computes a single homography for image regions that belong to the same plane, while borrowing the results of CPW for non-planar regions (Figure 1 third row). In this way, we not only seamlessly integrate the information about planar structures of the scene into the stabilization framework, but also provide an unified framework for 2D-3D stabilization. When the scene is dominated by complex non-planar or dynamic structures, our method becomes CPW which is known to work well in such cases, whereas on the other end, if the scene contains a single large plane, it reduces to the robust and efficient 2D method Related Work In general, depending on the level of scene geometry one recovers, existing video stabilization techniques can be roughly divided into two categories. Methods in the first category [19, 10, 6, 15, 13] aim to estimate a single 2D transformation between each pair of frames. Stabilization is then obtained by smoothing the parameters of 2D transformations followed by synthesizing a new video using the smoothed parameters. It is well known that 2D stabilization can only achieve limited smoothing before introducing noticeable artifacts to the output video. Several ideas have been examined in recent years to alleviate this problem, including interpolating the homography matrices in a transformed space [10], considering user s capturing intention [6], directly smoothing a set of robust feature trajectories [15], and designing an l 1 -optimal camera path [13]. In order to fully handle general scene structure and camera motion, 3D stabilization methods [5, 7, 3, 16] attempt to recover true camera motion and scene structures via structure from motion (SFM) systems. Stabilization is subsequently done by smoothing the camera path in 3D and synthesizing a new video based on the smoothed path. To avoid the dependency on structure from motion techniques, [17] directly smoothes the 2D feature trajectories based on the observation that they approximately lie in a low-
3 dimensional subspace over any short period of time. Alternatively, [11] resorts to epipolar point transfer, which only requires projective reconstruction. However, all these methods except [11] solely rely on features that allow reliable tracking, hence suffer from the presence of large textureless regions. In [11], epipolar constraints are used to search for additional matches along edges. But this approach is very sensitive to noise, and does not work if there is no strong edge in the scene. Recently, [18] proposes to use additional depth sensors to compensate for the lack of feature tracks, but access to depth data is unrealistic for the vast majority of amateur videos. The problem of segmenting video into motion layers that admit parametric transformation models is first studied in [25], and remains an active research topic in computer vision today. Since its goal is to obtain simultaneous motion estimation and segmentation, it typically involves iterative schemes which are prone to local minima. Given camera motion and 3D point cloud, early works on piecewiseplanar scene segmentation from multiple images [1, 26] are based on line grouping and plane sweeping, whose complexity is prohibitive beyond a few images. More recently, [2] and [24] both combine the idea of random sampling consensus (RANSAC) with photometric consistency check to obtain piecewise planar scene models. However, the experiment results in both papers only involve simple examples with little non-planar structure. In addition, their computational complexity is still too high for our purpose. For example, it is reported in [24] that it takes 14 hours to process a sequence consisting of 380 frames. Finally, planes extracted from 3D point clouds or depth maps have been recently explored to improve the performance of multi-view stereo (MVS) systems [21, 8, 9, 20]. But these methods are again too slow for more than a few images. In summary, none of the existing methods meets our goal of obtaining satisfactory segmentation results within a few seconds for long video sequences. 2. Overview of the Content-Preserving Warping Technique Since our method is built upon the content-preserving warping (CPW) technique introduced in [16], in this section we give a brief review of it. Generally speaking, CPW is an image warping technique specifically designed for 3D stabilization, which aims to deform an input frame according to a set of 2D sparse displacement constraints induced by the 3D viewpoint change, while minimizing the distortion of local shape and salient image content. In particular, it takes two sets of corresponding 2D points as input ˆP in the input frame, and P in the output frame and create a dense warp guided by the displacements from ˆP to P. For 3D stabilization, ˆP and P are obtained by projecting the reconstructed 3D points into input and output (stabilized) cameras, respectively. To create the dense warp, CPW first divides the original video frame Î into an m n uniform grid mesh, represented by a set of N vertices ˆV = {ˆv q } N q=1. Then, it estimates a warped version of the mesh, denoted by V = {v q } N q=1, for the output frame by minimizing the following objective function: E(V ) = E d (V ) + αe s (V ), (1) where α is a scalar weight between the data term E d (V ) and smoothness term E s (V ). Data term. The data term penalizes the difference in the output frame between the projected location of each point P t and the location suggested by the estimated mesh V. For each point ˆP t in the input frame, a bilinear interpolation of the four corners of the enclosing grid cell, denoted by ˆV t, is first computed so that ˆPt = wt T ˆV t. Here, the vector w t contains the four coefficients that sum to 1. Then, the data term is defined as: E d (V ) = t w T t V t P t 2. (2) Smoothness Term. The smoothness term measures the deviation of the estimated 2D transformation of each grid cell from a similarity transformation. This is inspired by the work [14], which suggests that warps resembling a similarity transformation can effectively avoid noticeable distortions of image content due to shearing and non-uniform scaling, hence should be preferred as long as the viewpoint change is not too large, which is indeed the case in video stabilization. [14] further shows that this constraint can be written in the form of every three vertices that form a triangle in a grid cell. Specially, let ( ˆV 1, ˆV 2, ˆV 3 ) and (V1, V2, V3 ) denote the vertices of any triangle in the input and output grid mesh, respectively. Then, its deviation from a similarity transformation can be written as e s ( ) = V 1 (V 2 +a (V 3 V 2 )+b R 90 (V 3 V 2 )) 2, (3) where a, b satisfy ˆV 1 = ˆV 2 + a ( ˆV 3 ˆV 2 ) + b R 90 ( ˆV 3 ˆV 2 ), (4) and R 90 = [0 1; 1 0] is a 2D rotation matrix. Finally, the smoothness term E s (V ) is the sum of e s ( ) over all eight triangles of each vertex: E s (V ) = e s ( ). (5) Since minimizing the energy E(V ) is a linear leastsquares problem in the set of unknown V, it can be solved efficiently by any standard linear system solver. The output frame is then generated using standard texture mapping algorithm according to V.


![regions. First, we detect scene planes from 3D point cloud obtained by structure from motion using a robust multiple structure estimation algorithm called J-Linkage [23].](/docs-images/74/69706442/images/4-2.jpg "Second, we describe a novel video segmentation algorithm, which classifies each grid cell in the CPW framework into K + 1 classes one for each of the K detected planes, plus a non-planar class.")
4 Finally we note that, according to the above discussion, the warp obtained by CPW tends to be close to a similarity transformation, especially in regions where features are rare or non-existing. However, similarity transformation cannot faithfully represent the projective effects of the scene, hence may cause serious wobble effects in the stabilized videos. Next, we show how this problem can be properly addressed by incorporating information about scene planes. 3. Fast Piecewise Planar and Non-Planar Scene Segmentation for Videos In this section, we propose a fast two-step approach to automatically segment each video frame into piecewise planar and non-planar regions. First, we detect scene planes from 3D point cloud obtained by structure from motion using a robust multiple structure estimation algorithm called J-Linkage [23]. Second, we describe a novel video segmentation algorithm, which classifies each grid cell in the CPW framework into K + 1 classes one for each of the K detected planes, plus a non-planar class. For this problem, we lay out a MRF formulation for the entire sequence to simultaneously take into account the spatial coherence between neighboring cells within each frame, and improve the segmentation consistency across different frames. We now describe these two steps in details Multiple Plane Detection Since real scenes often contain multiple planes as well as non-planar structures, we adopt a robust multiple structure estimation method called J-Linkage [23] to detect planes from 3D point cloud. Similar to the popular RANSAC technique, this method is based on sampling consensus. Meanwhile, it has been shown in [23] that J-Linkage substantially outperforms other variants of RANSAC for multiple structure detection, such as sequential RANSAC and multi-ransac [29], in many real applications including 3D plane fitting. Basically, J-Linkage works in the following way. It first generates a large number (typically a few thousands) of putative models by random sampling. Next, for each data point, a preference set (PS) of models is computed, which include all the models to which the distance from that data point is less than a threshold ɛ. J-Linkage then uses a bottom-up scheme to iteratively group data points that have similar PS. Here, the PS of a cluster is defined as the intersection of the preference sets of its members. Specifically, in each iteration, J-Linkage computes the Jaccard distance between any two clusters A and B: d J (A, B) = A B A B A, (6) B and merge the two clusters with the smallest distance. As in RANSAC, the only free parameter of J-Linkage is the Figure 2. Three planes are detected by J-Linkage [23] on the video shown in FIgure 3. consensus threshold ɛ, which is set to 10 in our experiments. Also, since our goal is to detect large scene planes, we only keep those clusters with a support size larger than one sixth of the total number of points. Figure 2 shows the result of applying J-Linkage to the 3D point cloud for an indoor video sequence taken by a person walking down the corridor with a hand-held camera (see Figure 3 for some input frames). In this example, three planes are detected, namely the ground and two side-walls. Although J-Linkage fails to detect the other two planes, namely the ceiling and front door, due to their small support sizes, we still consider the result successful as these two planes only occupy a very small portion of the video frames A Markov Random Field Formulation for Video Segmentation Once a set of dominant planes is detected, the next step is to perform piecewise planar and non-planar segmentation for each input frame. To take both spatial and temporal consistency into consideration, we define a Markov random field for the entire sequence. For each frame, I f, f = 1,..., F, we divide it into a uniform grid mesh and build a graph G f = (V f, E f ) on it. Each vertex p V f is a cell of the mesh, while the edges, E f, denote the neighboring relationship between cells. Then, the graph {G f } from all frames are merged into a large graph G = (V, E), by adding edges between the two cells at the same spatial location in two consecutive frames. Given a set of K 3D planes, our goal is to assign a unique label l i to each vertex p i V. That is, l i = k, k = 1, 2,..., K if p i belongs to the k-th plane, and l i = 0 if p i lies on any non-planar surface. The solution L = {l i } can be obtained by minimizing the energy function E(L) = p i V Ψ i (l i ) + e ij E Ψ ij (l i, l j ), (7) which involves a unary data function Ψ i and a pairwise smoothness function Ψ ij. In this paper, we adopt the popular multi-label graph-cut algorithm [4] to minimize E(L). It is guaranteed to find a solution that is within a constant fac-
 into the K + 1 classes based on the proposed distance measure x x k 2.")





 we show the results of classifying each 3D point (represented by its image in each frame) into the K + 1 classes based on the proposed distance measure for an indoor scene.")
 = δ(l i, l j ) g(i, j), (9) where δ(l i, l j ) is the indicator function which takes value 0 if l i")
, we compute the 2D intersection line L between them in each frame I f.")
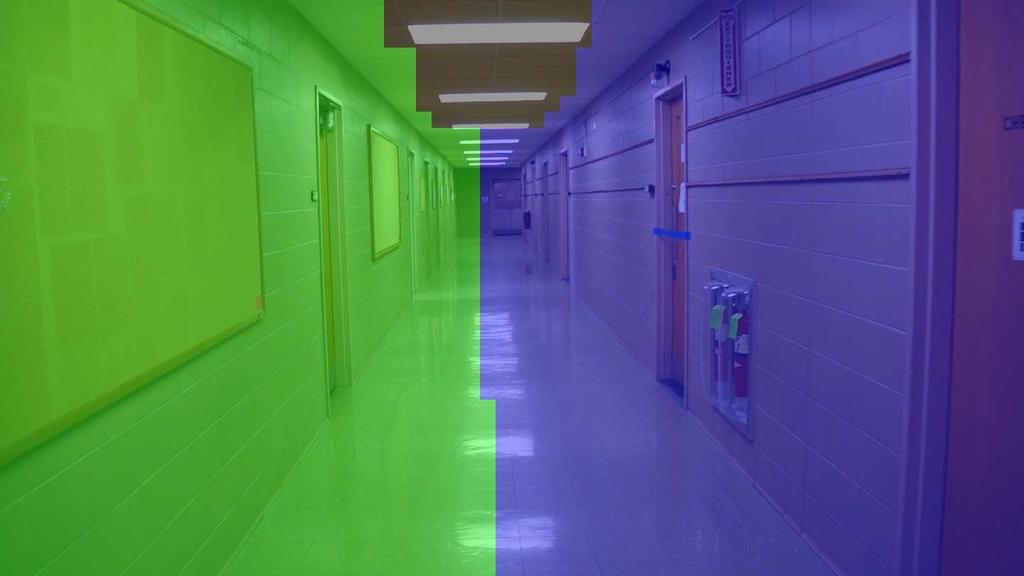
5 Figure 3. Piecewise planar and non-planar scene segmentation. First Row: Results of classifying each 3D point (represented by its image in each frame) into the K + 1 classes based on the proposed distance measure x x k 2. Each color represents a class, with black circles corresponding to the points labeled as non-planar, i.e., x x k 2 > β, k. Second Row: Segmentation results obtained by the proposed method. tor of the global minimum, and has been shown to produce satisfactory results in many vision tasks [22]. Data term. For a vertex in the f-th frame, p i V f, the function Ψ i is defined as follows. Let X i be the set of 3D points whose images in the f-th frame lie in the cell corresponding to p i. Then, for each point X X i, we compute its projection to the k-th plane, denoted as Xk. We further denote x and x k as the images of X and X k in the f-th frame, respectively. The function Ψ i then measures the image distance between x and x k : { Ψ i (l i ) = X X i min{ x x k 2, d max }, if l i = k > 0 β X i, if l i = 0 (8) where β is a penalty assigned to each point X X i if the corresponding cell is classified as non-planar. Note that, geometrically, β can be viewed as a threshold that determines how far the images of X and its projection onto the k-th plane Xk may be before X is considered not belonging to that plane. On one hand, by comparing the image distance instead of the distance in 3D, β sets a uniform threshold across all 3D point which is irrelevant to their individual uncertainty in the 3D space. On the other hand, the value of β should depend on the overall accuracy of structure from motion, and is chosen to be 1.5 times the size of each cell in our paper. For example, for a input frame, we have β = 15. In addition, the distance measure has been truncated in Eq. (8) to d max in order to prevent it from being dominated by a small number poorly reconstructed 3D points. We fix d max = 2β for all the experiments. In Figure 3 (first row) we show the results of classifying each 3D point (represented by its image in each frame) into the K + 1 classes based on the proposed distance measure for an indoor scene. As one can see, the classification results indeed give us very strong cues for segmentation. Smoothness term. For each edge e ij E in the same image I f, the smoothness function is defined as: Ψ ij (l i, l j ) = δ(l i, l j ) g(i, j), (9) where δ(l i, l j ) is the indicator function which takes value 0 if l i = l j, and 1 otherwise. The function g(i, j) is designed to improve the estimation of label boundaries by imposing geometric constraints derived from multiple planes in the scene. First, for each pair of planes in the scene (if exists), we compute the 2D intersection line L between them in each frame I f. Then, we find all pairs of neighboring cells (p i, p j ) in I f where the centers of p i and p j lie on different sides of L, and accumulate all such pairs for all intersection lines in a set E L f. Finally, the function g(i, j) is defined as { λ1, if (p g(i, j) = i, p j ) / Ef L λ 2, otherwise (10) For edges e ij across two frames, the smooth cost is defined as Ψ ij (l i, l j ) = λ 3 δ(l i, l j ). (11) In this paper, λ 1, λ 2 and λ 3 are empirically set to λ 1 = λ 3 = 10, λ 2 = 2 for all experiments. In Figure 3 and Figure 4, we show some representative results of the proposed method. As one can see, our segmentation algorithm correctly identifies the large planar regions in a variety of indoor and outdoor scenes. However, since our algorithm purely relies on geometric cues, the label boundaries estimated by it may not be very accurate. This is mainly due to the uncertainty in 3D reconstruction, which decides the smallest possible threshold β one can choose to distinguish points on a plane from others. In addition, the facts that our algorithm only operates on a coarse spatial grid, and that feature points are not evenly distributed in the images, could also contribute to the errors. Nevertheless, we find that these errors have little effect on the final stabilization results, since the shifts in viewpoint are usually small for video stabilization. In terms of speed, for a typical sequence such as the one shown in Figure 3 with 250 frames, the plane detection 1 and 1 We use the Matlab code downloaded from the J-Linkage website:




















6 Scene 1 Scene 2 Scene 3 Scene 4 Scene 5 Scene 6 Figure 4. Additional results on piecewise planar and non-planar scene segmentation. piecewise planar scene segmentation algorithms take about 10 and 15 seconds on a desktop PC with 3.40GHz CPU and 12GB memory, respectively. 4. Plane-Based Stabilization As we have already discussed, this paper aims at leveraging the flexibility of CPW and the structural regularities (i.e., planar surfaces) of the scene to produce high-quality stabilization results, especially in the cases where CPW performs poorly because of large textureless regions. In this section, we describe our plane-based stabilization algorithm in details. Like other 3D stabilization methods, our plane-based method first applies structure from motion to recover the original camera motion and sparse 3D point cloud. In this paper, we use ACTS [27], a publicly available structure from motion system. To generate the stabilized camera path, we apply Gaussian filter to the original camera parameters. Since a camera can be modeled by a rotation matrix R SO(3) and its center C R3, we apply a Gaussian filter to these two components separately. Note that, since the space of rotation matrices is not Euclidean, the filtering of the rotational component is done in a locally linearized space at each timestamp in the same way described in [16]. For novel view synthesis, we also follow the same idea of [16] by processing one input frame at a time to avoid ghosting effect caused by the moving objects. Each input frame is divided into a grid mesh V = {v q }N q=1 and the content-preserving warp is then computed. We de-











![videos that are used in [16] to demonstrate the](/docs-images/74/69706442/images/7-11.jpg "performance of CPW.")























7 Figure 5. Snapshots of the videos used for evaluation. note the output mesh by V 0 = {v 0q }. To incorporate information about the piecewise planar scene structures into stabilization, we give a label, lq, to each vertex of the mesh according to the labels of its surrounding cells. For any vertex that lies on the segmentation boundary (hence the surrounding cells have more than one labels), we simply assign the smallest label to it. Based on the labels, a new mesh V = {v q } is computed: Hk vˆq if lq = k, k = 1,..., K (12) vq = if lq = 0 v 0q, where Hk is the homography induced by the k-th plane between the input and output frames. The output frame is then obtained using standard texture mapping algorithms. 5. Experiments We have tested our algorithm on 32 video sequences (see Figure 5) which consist of one or more large scene planes, including 5 videos that are used in [16] to demonstrate the performance of CPW. These sequences cover a wide range of scenes from both natural and indoor/outdoor man-made environments. Among them, noticeable wobble effects can be seen in 18 results obtained by CPW, due to the lack of feature tracks in large planar regions. Meanwhile, our plane-based method succeeds in 30 of the 32 videos, generating satisfactory stabilization results. We show a number of results in our project website.2 Challenging cases. For the other two testing videos shown in Figure 6, our method is not able to completely remove the wobble effects, although it still produces better results than CPW. In the first video, only a very small number of points are reconstructed on the ground, with a large number of outliers due to reflection. Therefore, J-Linkage fails to detect the ground plane in the case. Consequently, our segmentation algorithm incorrectly assigns the ground regions to the planes corresponding to the walls, causing undesirable artifacts in the stabilized video. In the second video, the 2 (a) Input frame with points (b) Segmentation result Figure 6. Challenging cases for our method. First row: In this case, only a very small number of points are detected on the ground. Some of them actually correspond to the reflection. Second row: In this case, the ground is slightly curved. ground is slightly curved, which confuses our plane detection and segmentation algorithms. As a result, a portion of the ground region is labeled as non-planar, hence the wobble effects remain in the output video. In fact, both cases reveal the dependency of our method s performance on a few free parameters in the plane detection and segmentation algorithms, for which a set of fixed values is certainly not enough to handle all cases. Nevertheless, we have shown in this paper that, by exploiting scene structures such as the planar surfaces, our method significantly outperforms CPW in many challenging cases. 6. Conclusion, Limitations, and Future Work In this paper we have described a novel method for video stabilization, which outperforms the state-of-the-art methods by taking advantage of the presence of large planes in the scene. Our method is built upon the newly proposed CPW framework, but is able to avoid the difficulties of CPW in handling large textureless regions. In particular, we have proposed an efficient Markov random field formulation to segment each video frame into piecewise planar and non-
8 planar regions. This level of scene understanding is shown to be ideal for generating high-quality jitter-free videos in a variety of practical scenarios. Like CPW and many other 3D methods, our algorithm relies on structure from motion to get accurate information about the 3D scene structures and camera motions. For this reason, all the videos tested in this paper are chosen to be friendly to SFM. Also, we do not address other common issues in video stabilization, including the smaller field of view, motion blur [19], and rolling shuttle effects [12]. Another bottleneck of our method is the plane detection part. Currently we use the robust model estimation package J-Linkage, but it leaves to the user to decide the minimum number of inliers for a valid model, hence may fail when the number of reconstructed 3D points on the plane is extremely small. A different direction would be combining plane detection with 3D reconstruction, as studied in [28]. 7. Acknowledgement This work is supported in part by Adobe Systems Incorporated. Zihan Zhou and Yi Ma gratefully acknowledge support by ONR N , NSF CCF , and NSF IIS References [1] C. Baillard and A. Zisserman. Automatic reconstruction of piecewise planar models from multiple views. In CVPR, pages , [2] A. Bartoli. A random sampling strategy for piecewise planar scene segmentation. Computer Vision and Image Understanding, 105(1):42 59, [3] P. Bhat, C. L. Zitnick, N. Snavely, A. Agarwala, M. Agrawala, M. F. Cohen, B. Curless, and S. B. Kang. Using photographs to enhance videos of a static scene. In Rendering Techniques, pages , , 2 [4] Y. Boykov, O. Veksler, and R. Zabih. Fast approximate energy minimization via graph cuts. IEEE Trans. Pattern Anal. Mach. Intell., 23(11): , [5] C. Buehler, M. Bosse, and L. McMillan. Non-metric imagebased rendering for video stabilization. In CVPR (2), pages , , 2 [6] B.-Y. Chen, K.-Y. Lee, W.-T. Huang, and J.-S. Lin. Capturing intention-based full-frame video stabilization. Comput. Graph. Forum, 27(7): , , 2 [7] A. W. Fitzgibbon, Y. Wexler, and A. Zisserman. Image-based rendering using image-based priors. International Journal of Computer Vision, 63(2): , , 2 [8] Y. Furukawa, B. Curless, S. M. Seitz, and R. Szeliski. Manhattan-world stereo. In CVPR, pages , [9] D. Gallup, J.-M. Frahm, and M. Pollefeys. Piecewise planar and non-planar stereo for urban scene reconstruction. In CVPR, pages , [10] M. Gleicher and F. Liu. Re-cinematography: Improving the camerawork of casual video. TOMCCAP, 5(1), , 2 [11] A. Goldstein and R. Fattal. Video stabilization using epipolar geometry. ACM Trans. Graph., 32(5), [12] M. Grundmann, V. Kwatra, D. Castro, and I. Essa. Effective calibration free rolling shutter removal. IEEE ICCP, [13] M. Grundmann, V. Kwatra, and I. A. Essa. Auto-directed video stabilization with robust l1 optimal camera paths. In CVPR, pages , , 2 [14] T. Igarashi, T. Moscovich, and J. F. Hughes. As-rigidas-possible shape manipulation. ACM Trans. Graph., 24(3): , [15] K.-Y. Lee, Y.-Y. Chuang, B.-Y. Chen, and M. Ouhyoung. Video stabilization using robust feature trajectories. In ICCV, pages , , 2 [16] F. Liu, M. Gleicher, H. Jin, and A. Agarwala. Contentpreserving warps for 3d video stabilization. ACM Trans. Graph., 28(3), , 2, 3, 6, 7 [17] F. Liu, M. Gleicher, J. Wang, H. Jin, and A. Agarwala. Subspace video stabilization. ACM Trans. Graph., 30(1):4, [18] S. Liu, Y. Wang, L. Yuan, J. Bu, P. Tan, and J. Sun. Video stabilization with a depth camera. In CVPR, pages 89 95, [19] Y. Matsushita, E. Ofek, W. Ge, X. Tang, and H.-Y. Shum. Full-frame video stabilization with motion inpainting. IEEE Trans. Pattern Anal. Mach. Intell., 28(7): , , 2, 8 [20] B. Micusík and J. Kosecká. Multi-view superpixel stereo in urban environments. International Journal of Computer Vision, 89(1): , [21] S. N. Sinha, D. Steedly, and R. Szeliski. Piecewise planar stereo for image-based rendering. In ICCV, pages , [22] R. Szeliski, R. Zabih, D. Scharstein, O. Veksler, V. Kolmogorov, A. Agarwala, M. F. Tappen, and C. Rother. A comparative study of energy minimization methods for markov random fields with smoothness-based priors. IEEE Trans. Pattern Anal. Mach. Intell., 30(6): , [23] R. Toldo and A. Fusiello. Robust multiple structures estimation with j-linkage. In ECCV (1), pages , [24] R. Toldo and A. Fusiello. Photo-consistent planar patches from unstructured cloud of points. In ECCV (5), pages , [25] J. Y. A. Wang and E. H. Adelson. Representing moving images with layers. IEEE Transactions on Image Processing, 3(5): , [26] T. Werner and A. Zisserman. New techniques for automated architectural reconstruction from photographs. In ECCV (2), pages , [27] G. Zhang, X. Qin, W. Hua, T.-T. Wong, P.-A. Heng, and H. Bao. Robust metric reconstruction from challenging video sequences. In CVPR, [28] Z. Zhou, H. Jin, and Y. Ma. Robust plane-based structure from motion. In CVPR, pages , [29] M. Zuliani, C. S. Kenney, and B. S. Manjunath. The multiransac algorithm and its application to detect planar homographies. In ICIP (3), pages ,
Video Stabilization with a Depth Camera
 Video Stabilization with a Depth Camera Shuaicheng Liu 1 Yinting Wang 1 Lu Yuan 2 Ping Tan 1 Jian Sun 2 1 National University of Singapore 2 Microsoft Research Asia Abstract Previous video stabilization
Video Stabilization with a Depth Camera Shuaicheng Liu 1 Yinting Wang 1 Lu Yuan 2 Ping Tan 1 Jian Sun 2 1 National University of Singapore 2 Microsoft Research Asia Abstract Previous video stabilization
SteadyFlow: Spatially Smooth Optical Flow for Video Stabilization
 SteadyFlow: Spatially Smooth Optical Flow for Video Stabilization Shuaicheng Liu 1 Lu Yuan 2 Ping Tan 1 Jian Sun 2 1 National University of Singapore 2 Microsoft Research Abstract We propose a novel motion
SteadyFlow: Spatially Smooth Optical Flow for Video Stabilization Shuaicheng Liu 1 Lu Yuan 2 Ping Tan 1 Jian Sun 2 1 National University of Singapore 2 Microsoft Research Abstract We propose a novel motion
Ping Tan. Simon Fraser University
 Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Video Stabilization with a Depth Camera
 Video Stabilization with a Depth Camera Shuaicheng Liu 1 Yinting Wang 1,2 Lu Yuan 3 Jiajun Bu 2 Ping Tan 1 Jian Sun 3 1 National University of Singapore 2 Zhejiang University 3 Microsoft Research Asia
Video Stabilization with a Depth Camera Shuaicheng Liu 1 Yinting Wang 1,2 Lu Yuan 3 Jiajun Bu 2 Ping Tan 1 Jian Sun 3 1 National University of Singapore 2 Zhejiang University 3 Microsoft Research Asia
VIDEO STABILIZATION WITH L1-L2 OPTIMIZATION. Hui Qu, Li Song
 VIDEO STABILIZATION WITH L-L2 OPTIMIZATION Hui Qu, Li Song Institute of Image Communication and Network Engineering, Shanghai Jiao Tong University ABSTRACT Digital videos often suffer from undesirable
VIDEO STABILIZATION WITH L-L2 OPTIMIZATION Hui Qu, Li Song Institute of Image Communication and Network Engineering, Shanghai Jiao Tong University ABSTRACT Digital videos often suffer from undesirable
Joint Subspace Stabilization for Stereoscopic Video
 Joint Subspace Stabilization for Stereoscopic Video Feng iu Portland State University fliu@cs.pdx.edu Yuzhen Niu, Fuzhou University yuzhen@cs.pdx.edu Hailin Jin Adobe esearch hljin@adobe.com Abstract Shaky
Joint Subspace Stabilization for Stereoscopic Video Feng iu Portland State University fliu@cs.pdx.edu Yuzhen Niu, Fuzhou University yuzhen@cs.pdx.edu Hailin Jin Adobe esearch hljin@adobe.com Abstract Shaky
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Video Stabilization by Procrustes Analysis of Trajectories
 Video Stabilization by Procrustes Analysis of Trajectories Geethu Miriam Jacob Indian Institute of Technology Chennai, India geethumiriam@gmail.com Sukhendu Das Indian Institute of Technology Chennai,
Video Stabilization by Procrustes Analysis of Trajectories Geethu Miriam Jacob Indian Institute of Technology Chennai, India geethumiriam@gmail.com Sukhendu Das Indian Institute of Technology Chennai,
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Parallax-tolerant Image Stitching
 Parallax-tolerant Image Stitching Fan Zhang and Feng Liu Department of Computer Science Portland State University {zhangfan,fliu}@cs.pdx.edu Abstract Parallax handling is a challenging task for image stitching.
Parallax-tolerant Image Stitching Fan Zhang and Feng Liu Department of Computer Science Portland State University {zhangfan,fliu}@cs.pdx.edu Abstract Parallax handling is a challenging task for image stitching.
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images
 Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images Ricardo Cabral Carnegie Mellon University rscabral@cmu.edu Yasutaka Furukawa Washington University in St. Louis
Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images Ricardo Cabral Carnegie Mellon University rscabral@cmu.edu Yasutaka Furukawa Washington University in St. Louis
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation
 Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation Alaa E. Abdel-Hakim Electrical Engineering Department Assiut University Assiut, Egypt alaa.aly@eng.au.edu.eg Mostafa Izz Cairo
Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation Alaa E. Abdel-Hakim Electrical Engineering Department Assiut University Assiut, Egypt alaa.aly@eng.au.edu.eg Mostafa Izz Cairo
Manhattan-world Stereo and Surface Reconstruction
 Manhattan-world Stereo and Surface Reconstruction Kuan-Ting Yu CSAIL MIT Cambridge, USA peterkty@csail.mit.edu Abstract Depth estimation from 2D images has been extensively studied in the computer vision
Manhattan-world Stereo and Surface Reconstruction Kuan-Ting Yu CSAIL MIT Cambridge, USA peterkty@csail.mit.edu Abstract Depth estimation from 2D images has been extensively studied in the computer vision
Piecewise Planar Stereo for Image-based Rendering
 Piecewise Planar Stereo for Image-based Rendering Sudipta N. Sinha Microsoft Research sudipsin@microsoft.com Drew Steedly Microsoft steedly@microsoft.com Richard Szeliski Microsoft Research szeliski@microsoft.com
Piecewise Planar Stereo for Image-based Rendering Sudipta N. Sinha Microsoft Research sudipsin@microsoft.com Drew Steedly Microsoft steedly@microsoft.com Richard Szeliski Microsoft Research szeliski@microsoft.com
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Combining Monocular Geometric Cues with Traditional Stereo Cues for Consumer Camera Stereo
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Combining Monocular Geometric
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Combining Monocular Geometric
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
EXAMPLE-BASED MOTION MANIPULATION
 EXAMPLE-BASED MOTION MANIPULATION Pin-Ching Su, Hwann-Tzong Chen Chia-Ming Cheng National Tsing Hua University MediaTek ABSTRACT This paper introduces an idea of imitating camera movements and shooting
EXAMPLE-BASED MOTION MANIPULATION Pin-Ching Su, Hwann-Tzong Chen Chia-Ming Cheng National Tsing Hua University MediaTek ABSTRACT This paper introduces an idea of imitating camera movements and shooting
Visualization 2D-to-3D Photo Rendering for 3D Displays
 Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Content-Preserving Warps for 3D Video Stabilization
 Content-Preserving Warps for 3D Video Stabilization Feng Liu Michael Gleicher University of Wisconsin-Madison Hailin Jin Aseem Agarwala Adobe Systems, Inc. Abstract We describe a technique that transforms
Content-Preserving Warps for 3D Video Stabilization Feng Liu Michael Gleicher University of Wisconsin-Madison Hailin Jin Aseem Agarwala Adobe Systems, Inc. Abstract We describe a technique that transforms
Epipolar Geometry Based On Line Similarity
 2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 Epipolar Geometry Based On Line Similarity Gil Ben-Artzi Tavi Halperin Michael Werman
2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 Epipolar Geometry Based On Line Similarity Gil Ben-Artzi Tavi Halperin Michael Werman
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Subspace Video Stabilization
 Subspace Video Stabilization FENG LIU Portland State University MICHAEL GLEICHER University of Wisconsin-Madison and JUE WANG, HAILIN JIN ASEEM AGARWALA Adobe Systems, Inc. We present a robust and efficient
Subspace Video Stabilization FENG LIU Portland State University MICHAEL GLEICHER University of Wisconsin-Madison and JUE WANG, HAILIN JIN ASEEM AGARWALA Adobe Systems, Inc. We present a robust and efficient
arxiv: v4 [cs.cv] 8 Jan 2017
![arxiv: v4 [cs.cv] 8 Jan 2017](/thumbs/89/97563198.jpg "arxiv: v4 [cs.cv] 8 Jan 2017") Epipolar Geometry Based On Line Similarity Gil Ben-Artzi Tavi Halperin Michael Werman Shmuel Peleg School of Computer Science and Engineering The Hebrew University of Jerusalem, Israel arxiv:1604.04848v4
Epipolar Geometry Based On Line Similarity Gil Ben-Artzi Tavi Halperin Michael Werman Shmuel Peleg School of Computer Science and Engineering The Hebrew University of Jerusalem, Israel arxiv:1604.04848v4
Semantic Filtering for Video Stabilization
 Semantic Filtering for Video Stabilization K. Karageorgos, A. Dimou, A. Axenopoulos, P. Daras Information Technologies Institute CERTH 6th km Harilaou-Thermi, 57001 Thessaloniki, Greece {konstantinkarage,adimou,axenop,daras}@iti.gr
Semantic Filtering for Video Stabilization K. Karageorgos, A. Dimou, A. Axenopoulos, P. Daras Information Technologies Institute CERTH 6th km Harilaou-Thermi, 57001 Thessaloniki, Greece {konstantinkarage,adimou,axenop,daras}@iti.gr
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Using Shape Priors to Regularize Intermediate Views in Wide-Baseline Image-Based Rendering
 Using Shape Priors to Regularize Intermediate Views in Wide-Baseline Image-Based Rendering Cédric Verleysen¹, T. Maugey², P. Frossard², C. De Vleeschouwer¹ ¹ ICTEAM institute, UCL (Belgium) ; ² LTS4 lab,
Using Shape Priors to Regularize Intermediate Views in Wide-Baseline Image-Based Rendering Cédric Verleysen¹, T. Maugey², P. Frossard², C. De Vleeschouwer¹ ¹ ICTEAM institute, UCL (Belgium) ; ² LTS4 lab,
Capturing and View-Dependent Rendering of Billboard Models
 Capturing and View-Dependent Rendering of Billboard Models Oliver Le, Anusheel Bhushan, Pablo Diaz-Gutierrez and M. Gopi Computer Graphics Lab University of California, Irvine Abstract. In this paper,
Capturing and View-Dependent Rendering of Billboard Models Oliver Le, Anusheel Bhushan, Pablo Diaz-Gutierrez and M. Gopi Computer Graphics Lab University of California, Irvine Abstract. In this paper,
Combining Monocular Geometric Cues with Traditional Stereo Cues for Consumer Camera Stereo
 Combining Monocular Geometric Cues with Traditional Stereo Cues for Consumer Camera Stereo Adarsh Kowdle, Andrew Gallagher, and Tsuhan Chen Cornell University, Ithaca, NY, USA Abstract. This paper presents
Combining Monocular Geometric Cues with Traditional Stereo Cues for Consumer Camera Stereo Adarsh Kowdle, Andrew Gallagher, and Tsuhan Chen Cornell University, Ithaca, NY, USA Abstract. This paper presents
Dual-Feature Warping-based Motion Model Estimation
 Dual-Feature Warping-based Motion Model Estimation Shiwei Li Lu Yuan Hong Kong University of Science and Technology {slibc, quan}@cse.ust.hk Jian Sun Long Quan Microsoft Research {luyuan, jiansun}@microsoft.com
Dual-Feature Warping-based Motion Model Estimation Shiwei Li Lu Yuan Hong Kong University of Science and Technology {slibc, quan}@cse.ust.hk Jian Sun Long Quan Microsoft Research {luyuan, jiansun}@microsoft.com
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Specular Reflection Separation using Dark Channel Prior
 2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
Content-Preserving Warps for 3D Video Stabilization
 Content-Preserving Warps for 3D Video Stabilization Feng Liu Michael Gleicher University of Wisconsin-Madison Hailin Jin Aseem Agarwala Adobe Systems, Inc. Abstract We describe a technique that transforms
Content-Preserving Warps for 3D Video Stabilization Feng Liu Michael Gleicher University of Wisconsin-Madison Hailin Jin Aseem Agarwala Adobe Systems, Inc. Abstract We describe a technique that transforms
Space-Time Scene Manifolds
 Space-Time Scene Manifolds Y. Wexler D. Simakov Dept. of Computer Science and Applied Math The Weizmann Institute of Science Rehovot, 76100 Israel Abstract Non-Linear Scene Manifold Space-Time volume The
Space-Time Scene Manifolds Y. Wexler D. Simakov Dept. of Computer Science and Applied Math The Weizmann Institute of Science Rehovot, 76100 Israel Abstract Non-Linear Scene Manifold Space-Time volume The
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
View Synthesis for Multiview Video Compression
 View Synthesis for Multiview Video Compression Emin Martinian, Alexander Behrens, Jun Xin, and Anthony Vetro email:{martinian,jxin,avetro}@merl.com, behrens@tnt.uni-hannover.de Mitsubishi Electric Research
View Synthesis for Multiview Video Compression Emin Martinian, Alexander Behrens, Jun Xin, and Anthony Vetro email:{martinian,jxin,avetro}@merl.com, behrens@tnt.uni-hannover.de Mitsubishi Electric Research
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Selfie Video Stabilization
 Selfie Video Stabilization Jiyang Yu and Ravi Ramamoorthi University of California, San Diego jiy173@eng.ucsd.edu, ravir@cs.ucsd.edu Abstract. We propose a novel algorithm for stabilizing selfie videos.
Selfie Video Stabilization Jiyang Yu and Ravi Ramamoorthi University of California, San Diego jiy173@eng.ucsd.edu, ravir@cs.ucsd.edu Abstract. We propose a novel algorithm for stabilizing selfie videos.
Piecewise Image Registration in the Presence of Multiple Large Motions
 Piecewise Image Registration in the Presence of Multiple Large Motions Pravin Bhat 1, Ke Colin Zheng 1, Noah Snavely 1, Aseem Agarwala 1, Maneesh Agrawala 2, Michael F. Cohen 3, Brian Curless 1 1 University
Piecewise Image Registration in the Presence of Multiple Large Motions Pravin Bhat 1, Ke Colin Zheng 1, Noah Snavely 1, Aseem Agarwala 1, Maneesh Agrawala 2, Michael F. Cohen 3, Brian Curless 1 1 University
KERNEL-FREE VIDEO DEBLURRING VIA SYNTHESIS. Feitong Tan, Shuaicheng Liu, Liaoyuan Zeng, Bing Zeng
 KERNEL-FREE VIDEO DEBLURRING VIA SYNTHESIS Feitong Tan, Shuaicheng Liu, Liaoyuan Zeng, Bing Zeng School of Electronic Engineering University of Electronic Science and Technology of China, Chengdu, China
KERNEL-FREE VIDEO DEBLURRING VIA SYNTHESIS Feitong Tan, Shuaicheng Liu, Liaoyuan Zeng, Bing Zeng School of Electronic Engineering University of Electronic Science and Technology of China, Chengdu, China
COMP 558 lecture 22 Dec. 1, 2010
 Binocular correspondence problem Last class we discussed how to remap the pixels of two images so that corresponding points are in the same row. This is done by computing the fundamental matrix, defining
Binocular correspondence problem Last class we discussed how to remap the pixels of two images so that corresponding points are in the same row. This is done by computing the fundamental matrix, defining
Sashi Kumar Penta COMP Final Project Report Department of Computer Science, UNC at Chapel Hill 13 Dec, 2006
 Computer vision framework for adding CG Simulations Sashi Kumar Penta sashi@cs.unc.edu COMP 790-072 Final Project Report Department of Computer Science, UNC at Chapel Hill 13 Dec, 2006 Figure 1: (i) Top
Computer vision framework for adding CG Simulations Sashi Kumar Penta sashi@cs.unc.edu COMP 790-072 Final Project Report Department of Computer Science, UNC at Chapel Hill 13 Dec, 2006 Figure 1: (i) Top
Piecewise Planar and Non-Planar Stereo for Urban Scene Reconstruction
 Piecewise Planar and Non-Planar Stereo for Urban Scene Reconstruction David Gallup 1, Jan-Michael Frahm 1, and Marc Pollefeys 2 Department of Computer Science 1 Department of Computer Science 2 The University
Piecewise Planar and Non-Planar Stereo for Urban Scene Reconstruction David Gallup 1, Jan-Michael Frahm 1, and Marc Pollefeys 2 Department of Computer Science 1 Department of Computer Science 2 The University
Comparison of stereo inspired optical flow estimation techniques
 Comparison of stereo inspired optical flow estimation techniques ABSTRACT The similarity of the correspondence problems in optical flow estimation and disparity estimation techniques enables methods to
Comparison of stereo inspired optical flow estimation techniques ABSTRACT The similarity of the correspondence problems in optical flow estimation and disparity estimation techniques enables methods to
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Texture Sensitive Image Inpainting after Object Morphing
 Texture Sensitive Image Inpainting after Object Morphing Yin Chieh Liu and Yi-Leh Wu Department of Computer Science and Information Engineering National Taiwan University of Science and Technology, Taiwan
Texture Sensitive Image Inpainting after Object Morphing Yin Chieh Liu and Yi-Leh Wu Department of Computer Science and Information Engineering National Taiwan University of Science and Technology, Taiwan
Sparse Point Cloud Densification by Using Redundant Semantic Information
 Sparse Point Cloud Densification by Using Redundant Semantic Information Michael Hödlmoser CVL, Vienna University of Technology ken@caa.tuwien.ac.at Branislav Micusik AIT Austrian Institute of Technology
Sparse Point Cloud Densification by Using Redundant Semantic Information Michael Hödlmoser CVL, Vienna University of Technology ken@caa.tuwien.ac.at Branislav Micusik AIT Austrian Institute of Technology
Combining Monocular and Stereo Depth Cues
 Combining Monocular and Stereo Depth Cues Fraser Cameron December 16, 2005 Abstract A lot of work has been done extracting depth from image sequences, and relatively less has been done using only single
Combining Monocular and Stereo Depth Cues Fraser Cameron December 16, 2005 Abstract A lot of work has been done extracting depth from image sequences, and relatively less has been done using only single
On-line and Off-line 3D Reconstruction for Crisis Management Applications
 On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization
 Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization Kosuke Fukano, Yoshihiko Mochizuki, Satoshi Iizuka, Edgar Simo-Serra, Akihiro Sugimoto, and Hiroshi Ishikawa Waseda
Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization Kosuke Fukano, Yoshihiko Mochizuki, Satoshi Iizuka, Edgar Simo-Serra, Akihiro Sugimoto, and Hiroshi Ishikawa Waseda
Light Field Occlusion Removal
 Light Field Occlusion Removal Shannon Kao Stanford University kaos@stanford.edu Figure 1: Occlusion removal pipeline. The input image (left) is part of a focal stack representing a light field. Each image
Light Field Occlusion Removal Shannon Kao Stanford University kaos@stanford.edu Figure 1: Occlusion removal pipeline. The input image (left) is part of a focal stack representing a light field. Each image
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video
 Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
Stereo Matching: An Outlier Confidence Approach
 Stereo Matching: An Outlier Confidence Approach Li Xu and Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {xuli,leojia}@cse.cuhk.edu.hk Abstract. One of the
Stereo Matching: An Outlier Confidence Approach Li Xu and Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {xuli,leojia}@cse.cuhk.edu.hk Abstract. One of the
EECS 442: Final Project
 EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE. Nan Hu. Stanford University Electrical Engineering
 STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE Nan Hu Stanford University Electrical Engineering nanhu@stanford.edu ABSTRACT Learning 3-D scene structure from a single still
STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE Nan Hu Stanford University Electrical Engineering nanhu@stanford.edu ABSTRACT Learning 3-D scene structure from a single still
Image Transfer Methods. Satya Prakash Mallick Jan 28 th, 2003
 Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
URBAN STRUCTURE ESTIMATION USING PARALLEL AND ORTHOGONAL LINES
 URBAN STRUCTURE ESTIMATION USING PARALLEL AND ORTHOGONAL LINES An Undergraduate Research Scholars Thesis by RUI LIU Submitted to Honors and Undergraduate Research Texas A&M University in partial fulfillment
URBAN STRUCTURE ESTIMATION USING PARALLEL AND ORTHOGONAL LINES An Undergraduate Research Scholars Thesis by RUI LIU Submitted to Honors and Undergraduate Research Texas A&M University in partial fulfillment
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Video Alignment. Final Report. Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin
 Final Report Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This report describes a method to align two videos.
Final Report Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This report describes a method to align two videos.
BUILDING POINT GROUPING USING VIEW-GEOMETRY RELATIONS INTRODUCTION
 BUILDING POINT GROUPING USING VIEW-GEOMETRY RELATIONS I-Chieh Lee 1, Shaojun He 1, Po-Lun Lai 2, Alper Yilmaz 2 1 Mapping and GIS Laboratory 2 Photogrammetric Computer Vision Laboratory Dept. of Civil
BUILDING POINT GROUPING USING VIEW-GEOMETRY RELATIONS I-Chieh Lee 1, Shaojun He 1, Po-Lun Lai 2, Alper Yilmaz 2 1 Mapping and GIS Laboratory 2 Photogrammetric Computer Vision Laboratory Dept. of Civil
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
A GEOMETRIC SEGMENTATION APPROACH FOR THE 3D RECONSTRUCTION OF DYNAMIC SCENES IN 2D VIDEO SEQUENCES
 A GEOMETRIC SEGMENTATION APPROACH FOR THE 3D RECONSTRUCTION OF DYNAMIC SCENES IN 2D VIDEO SEQUENCES Sebastian Knorr, Evren mre, A. Aydın Alatan, and Thomas Sikora Communication Systems Group Technische
A GEOMETRIC SEGMENTATION APPROACH FOR THE 3D RECONSTRUCTION OF DYNAMIC SCENES IN 2D VIDEO SEQUENCES Sebastian Knorr, Evren mre, A. Aydın Alatan, and Thomas Sikora Communication Systems Group Technische
Perceptual Grouping from Motion Cues Using Tensor Voting
 Perceptual Grouping from Motion Cues Using Tensor Voting 1. Research Team Project Leader: Graduate Students: Prof. Gérard Medioni, Computer Science Mircea Nicolescu, Changki Min 2. Statement of Project
Perceptual Grouping from Motion Cues Using Tensor Voting 1. Research Team Project Leader: Graduate Students: Prof. Gérard Medioni, Computer Science Mircea Nicolescu, Changki Min 2. Statement of Project
Background Estimation for a Single Omnidirectional Image Sequence Captured with a Moving Camera
 [DOI: 10.2197/ipsjtcva.6.68] Express Paper Background Estimation for a Single Omnidirectional Image Sequence Captured with a Moving Camera Norihiko Kawai 1,a) Naoya Inoue 1 Tomokazu Sato 1,b) Fumio Okura
[DOI: 10.2197/ipsjtcva.6.68] Express Paper Background Estimation for a Single Omnidirectional Image Sequence Captured with a Moving Camera Norihiko Kawai 1,a) Naoya Inoue 1 Tomokazu Sato 1,b) Fumio Okura
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
An Overview of Matchmoving using Structure from Motion Methods
 An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu