Best Practices for Maneuvering
|
|
|
- Roberta Ford
- 6 years ago
- Views:
Transcription

1 Best Practices for Maneuvering STAR Global Conference - Berlin 2017 Timothy Yen, PhD Marine and Offshore Technical Specialist Priyanka Cholletti Advanced Application Engineer Carlo Pettinelli Engineering Manager, Italy Realize innovation.
2 . Agenda Overview Steady Drift Rotating Arm Planar Motion Mechanism Free Running Page 2
3 . Agenda Overview Steady Drift Rotating Arm Planar Motion Mechanism Free Running Page 3

4 Maneuvering This is the deliberate dynamic motion by marine vessels to change its direction by altering the position of control surfaces or powering or both. It is important to be able to predict the hydrodynamic forces imparted on the vessel during maneuvers in order to ensure the intrinsic stability of its form and to adequately design the control surfaces. Adequate maneuvering is important to the designer for Safe ship operations Obstacle avoidance Man overboard Contract requirements Regulatory requirements Page 4
5 Objective We will recreate the tests that are used to isolate the coefficients that can then be applied to equations-of-motion to predict the ships motion. By controlling the different flow conditions we can determine how particular orientations or ship motion rates impact the forces on ship. The results can be used to derive the coefficients. This presentation will review some of the important settings for the successful setup of maneuvering simulations Page 5
6 . Agenda Overview Steady Drift Rotating Arm Planar Motion Mechanism Free Running Page 6
7 Steady Drift In a steady drift test we are investigating the ship forces and moments due to a constant yaw angle relative to the incoming flow. Efficient simulations require: Consistent meshes for consistent results at different yaw angles Quick way to alter the ship angles Approach: Cylindrical refinement zone for near field wake Reports driven test parameter setup Equilibrium DFBI Page 7


8 Boundary Conditions The setup of the far-field boundary conditions are the same for a standard calm water resistance simulation. For review: Inlets Velocity boundary conditions with VOF flat waves for velocity and volume fraction Outlets Pressure outlet to define hydrostatic pressure Lateral boundaries Velocity inlets to recreate an open water condition or No-slip walls to model tow tank blockage Page 8


9 Yaw Angle Orientation Changing drift angle parametrically An expression report can be created to define the drift angle for the current simulation. This expression report can then be applied to a Transform Mesh Operation to rotate the hull. This parameterization approach ensures consistency and allows for easier automation. Page 9


10 Body Fixed Reference In all cases the forces and moments recorded need to be defined in the ship s frame of reference. 1. It is necessary to define a custom coordinate system at the ship s CG location called CGpivot. 2. CGpivot is applied to the DFBI to define the initial orientation. This coordinate system is the direction that the hull s motion will be free to move around. Page 10


11 Body Fixed Reference, cont d 3. Finally, the coordinate system must be rotated to the same drift angle. Be sure to specify itself as the reference system so that it is rotated over the LCG location. Page 11 Note: Alternative route using global parameters and coordinate system exporting

12 Mesh Refinements Refinements are necessary to accurately capture the wake behind the hull and thus the wavemaking drag. In order to create a setup that doesn t require adjustments we must create a wake refinement that is large enough to accommodate the hull for all yaw orientations. Similarly, a circular refine zone should be created around the hull in order to resolve the nearfield flow field. The circular zone is utilized to maintain the consistency of the refinement regardless of the yaw angle. Page 12


13 Results Drift Angle: 0 degrees Page 13

14 Results Drift Angle: 5 degrees Page 14


15 Results Drift Angle: 10 degrees Page 15


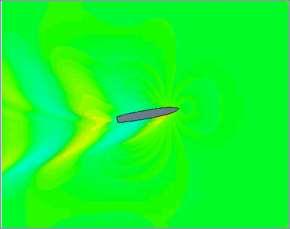
16 Results Drift Angle: 15 degrees Page 16

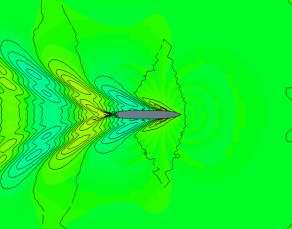
17 Results Drift Angle: 20 degrees Page 17




18 Overset Setup The overset setup is an alternative method to resolving the static drift angle without requiring remeshing in the background mesh. The methodology may also be desirable for consistency with other maneuvering simulations such as PMM that require an Overset setup. Overset requires an adequate buffer around the ship. Nominally it should be at least 4 to 5 cells for interpolation between Regions. The Overset Region can be rotated to the desired drift angle about CGpivot. Note that expressions are not accepted. Macros are required for full automation. Page 18
19 . Agenda Overview Steady Drift Rotating Arm Planar Motion Mechanism Free Running Page 19
 speed.")

20 Rotating Arm In a rotating arm test we are towing a vessel at a fixed radius and rotation rate. This allows us to isolate the forces due to a constant yaw rate of change at a constant surge (travel) speed. CFD allows for infinite clean water, there is no wake to run into during testing Efficient simulations require: Efficient modification of rotating arm operating parameters Convenient post-processing Approach: Similar mesh refinement setup as the static drift cases Moving reference frame setup using Reports driven test parameters Overset as an alternative approach to implement additional drift angles Page 20

21 Moving Reference Frame Utilizing a moving reference frame has several benefits over using the built-in Rotating Arm DFBI motion option: A stationary domain simplifying post-processing Ability to restart at a higher forward speed for a more efficient speed sweep Utilization of Equilibrium DFBI for improved motions convergence Prevents the requirement for overall domain rotation and translation Arm Axis CG Setup of Moving Reference Frame can be parametrically driven and automated using reports. Note that the Axis Origin of the arm runs through the LCG of the vessel so that it s effective being towed at that point. Page 21


22 Rotating Arm Parameters The parameters for the rotating arm operating conditions are going to be run by Expression Reports. Rotating Radius specifies the radius of the rotating arm. Here it is presented in multiples of the LOA Test Speed specifies the constant surge speed of the vessel Rotation Rate computes the rotational speed applied to the moving reference frame Page 22



23 Rotating Arm Result Page 23
24 . Agenda Overview Steady Drift Rotating Arm Planar Motion Mechanism Free Running Page 24

25 Planar Motion Mechanism (PMM) This mechanism was developed in the 1960s to evaluate marine vehicles in long narrow tow tanks for maneuvering coefficients with out the expense of rotating arm facilities. The PMM also allows for deriving higher order coefficients due to yaw and sway accelerations. The mechanism consists of up to two oscillating motions (sway and yaw) superposed on the steady translation of the carriage. SWAY YAW Page 25
26 Test Motions Two primary types of motions are usually implemented in order to derive non-linear coefficients: Pure Sway Ψ = 0 In-phase velocity-dependent terms and Added mass terms and Pure Yaw and Yaw-rate dependent terms and Yaw-acceleration terms and Page 26
27 CFD Methodology CFD offers the advantage of easily accommodating hull motions like heave and pitch that may not be possible or practical at all experimental facilities. Additional drift angles can be applied and a large test suite can be investigated. Efficient simulations require: Parametrically driven PMM parameters Mean course fixed coordinate systems for post-processing This allows a camera to follow the mean path of the hull like on a carriage Approach: To use Overset to simulate 3+3 DOF motion of the Hull Region and 1DOF motion of Background Region Utilize built-in PMM motions features Create a nested coordinate system and motion to achieve a carriage-fixed like post-processing scenes Page 27
28 Motion and Topology The PMM motions will utilize the built-in Planar Motion Carriage functionality to translate and rotate the Region to fulfill the specified motions. We will follow a two Region strategy to separate the response hull motions from the primary carriage translation. This prevents the large vertical displacements motions at the farfield boundaries that cause artifacts on the freesurface. Prescribed Motions Only: Surge Overset Region Farfield Region Prescribed Motions: Surge Sway Yaw DFBI Response: Pitch Heave (Roll) Page 28

29 PMM Parameters Like in the other tests, motions are driven parametrically by Expression Reports. PMM Drift Angle specifies an additional drift angle PMM Sway Amplitude specifies the maximum transverse displacement of the CG from the mean path PMM Sway Frequency specifies the oscillation frequency of the maneuver. PMM Test Vel specifies the mean velocity of the hull. Analogous to the carriage speed in experiments. Page 29

30 Specifying PMM Motion The PMM motion is specified by altering the default DFBI set up to follow the Planar Motion Carriage The Reports are then assigned to the motion settings Specifies a Pure Yaw motion where hull is always tangential to the ship path. Unchecked means it s a pure sway motion. Note that upon initialization the hull is orientated at t=0 to be tangential to the path +/- any Additional Drift Angle Page 30

31 Background Translation Motion We now need to specify a motion model that will translate the Background region at the carriage speed of the Hull motion. This will allow the ship to sway about a fix longitudinal position relative to the background mesh Create a new Translation Motion under Tools Motion in the simulation tree Specify the x-direction translation with the Report defining the carriage speed Select the CGpivot coordinate system as the Managed Coordinate System This will translate the coordinate system by the carriage motion Apply this Translation to the Background Region under its Physics Values Page 31

32 Flow Visualization Visualization scenes typically center on the hull but since the PMC motion translates the hull longitudinally each Scene s camera needs to follow the correct Coordinate System In the scene s Attributes View specify the CGpivot Coordinate System The CGpivot CS is being managed by the Translation motion so it allows the camera to follow the hull s course made-good Page 32
33 Time Step Size Besides the physical parameters that govern time step size selection, the interaction of the mesh spacing and its overset motion need to be considered In overset applications to maintain robustness and accuracy it is suggested that the time step size allow for a motion CFL number In a Pure Sway case, Page 33
34 Result Page 34
35 . Agenda Overview Steady Drift Rotating Arm Planar Motion Mechanism Free Running Page 35
36 Free running This condition is when the hull is experiencing all 6 degree-of-freedom dynamically due to hydrodynamic pressures and forces. It s a dynamic combination of: Self-propulsion Maneuvering Control surfaces Control systems Simulations require: Control system implementation Propulsion forces from propeller or virtual disk Approach: Overset for 6DOF hull motion and 3DOF Background Region motion to follow hull path and yaw but ignore heave, pitch and yaw Overset for propeller domains and control surfaces Use Reports to implement a proportional control system Page 36
 Page")
37 Domains Setup Use a multi-region Overset setup like the PMM case Prescribed Motions Only: Surge Sway Yaw Overset Region Farfield Region DFBI Motions: Surge Sway Heave Roll Pitch Yaw One Region for each control surface One Region for each propeller (if applicable eg Virtual Disk) Page 37
38 Background Mesh Motions A moving background Region is necessary to solve this simulation economically and avoid an impractically large background mesh for the vessel to operate within. The Background Region orientation and position needs to conform to the hull on the x-y plane. It will translate and yaw about the hull CG. It will not heave, roll or pitch. To implement this we need to translate a dummy coordinate system that stay parallel to the laboratory coordinate system but follows the hull s CG. Finally we create the real motion that translates like the hull but rotates about the hull CG. Page 38 Body Reports: Yaw Rate (Z Rot) in Lab CSys Vel X in Lab CSys Vel Y in Lab Csys Motion 1 Planar Translation Vel X Body Report Vel Y Body Report Reference Lab CSys Manage CSys: Planar Trans CSys Stays parallel with Lab Csys Init origin at CG Motion 2 Planar Translation & Turning Yaw Rate Body Report Vel X Body Report Vel Y Body Report Reference Planar Trans Csys Force background mesh to translate and rotate about ship CGx and CGy point


39 Control Surface Motions Rudders use Superposed motions relative to CG Rudder rotation rate specified by control system Current rudder angle is necessary for control system but there is no report. Workaround is necessary: Split the rudder into inboard and outboard surfaces Create unit normal vector field function $$Area/mag($$Area) Report the Surface Average Normal in X & Y Dir in Rudder Csys at initial conditions Compute a baseline angle constant at zero deflection atan2(i_dir, j_dir) Compute current angle at anytime by offsetting with zero deflection baseline angle Page 39

40 Control System Basic proportional feedback control system The P in a PID controller COURSE Page 40 HEADING - COURSE HEADING Requires some information: Max rudder speed: KNOWN Current rudder angle: COMPUTED Requested rudder angle: = Error x Kp Maximum rudder angle: KNOWN Proportional constant: TUNED PARAMETER Current heading: DFBI ORIENTATION REPORT Set course: USER SPECIFIED CFD RUDDER ANGLE Output rudder speed applied to superposed motion is computed as: 1. IF Request Angle < Max Angle IF (Request Angle Current Angle) / Δt > Max Speed THEN apply Max Speed ELSE apply (Request Angle Current Angle) / Δt 2. IF Request Angle > Max Angle Adjust Request Angle to Max Angle Goto 1 Note that angle is positive and negative. Maintain the sign of the requested angle Control system is implemented as a series of Expression Reports and then applied to DFBI Superposed Rotation motions.

41 Results 15 deg Zig Zag Page 41

42 Free running with manoeuvring Page 42
43 Carlo Pettinelli Engineering Manager, Torino Siemens PLM Italy DF PL S&SE GS CSS EU IT Realize innovation. Page 43
Use of STAR-CCM+ in Marine and Off-Shore Engineering - Key Features and Future Developments - M. Perić, F. Schäfer, E. Schreck & J.
 Use of STAR-CCM+ in Marine and Off-Shore Engineering - Key Features and Future Developments - M. Perić, F. Schäfer, E. Schreck & J. Singh Contents Main features of STAR-CCM+ relevant for marine and offshore
Use of STAR-CCM+ in Marine and Off-Shore Engineering - Key Features and Future Developments - M. Perić, F. Schäfer, E. Schreck & J. Singh Contents Main features of STAR-CCM+ relevant for marine and offshore
CFD VALIDATION FOR SURFACE COMBATANT 5415 STRAIGHT AHEAD AND STATIC DRIFT 20 DEGREE CONDITIONS USING STAR CCM+
 CFD VALIDATION FOR SURFACE COMBATANT 5415 STRAIGHT AHEAD AND STATIC DRIFT 20 DEGREE CONDITIONS USING STAR CCM+ by G. J. Grigoropoulos and I..S. Kefallinou 1. Introduction and setup 1. 1 Introduction The
CFD VALIDATION FOR SURFACE COMBATANT 5415 STRAIGHT AHEAD AND STATIC DRIFT 20 DEGREE CONDITIONS USING STAR CCM+ by G. J. Grigoropoulos and I..S. Kefallinou 1. Introduction and setup 1. 1 Introduction The
DEVELOPMENT OF A CFD MODEL FOR SIMULATION OF SELF-PROPULSION TESTS
 DEVELOPMENT OF A CFD MODEL FOR SIMULATION OF SELF-PROPULSION TESTS Alexandre T. P. Alho Laboratório de Sistemas de Propulsão DENO/POLI, UFRJ INTRODUCTION Motivation Growing demand for high efficiency propulsion
DEVELOPMENT OF A CFD MODEL FOR SIMULATION OF SELF-PROPULSION TESTS Alexandre T. P. Alho Laboratório de Sistemas de Propulsão DENO/POLI, UFRJ INTRODUCTION Motivation Growing demand for high efficiency propulsion
Coupling of STAR-CCM+ to Other Theoretical or Numerical Solutions. Milovan Perić
 Coupling of STAR-CCM+ to Other Theoretical or Numerical Solutions Milovan Perić Contents The need to couple STAR-CCM+ with other theoretical or numerical solutions Coupling approaches: surface and volume
Coupling of STAR-CCM+ to Other Theoretical or Numerical Solutions Milovan Perić Contents The need to couple STAR-CCM+ with other theoretical or numerical solutions Coupling approaches: surface and volume
Milovan Perić CD-adapco. Use of STAR-CCM+ in Marine and Offshore Engineering and Future Trends
 Milovan Perić CD-adapco Use of STAR-CCM+ in Marine and Offshore Engineering and Future Trends Introduction CD-adapco is developing simulation capabilities in STAR-CCM+ specifically for marine and offshore
Milovan Perić CD-adapco Use of STAR-CCM+ in Marine and Offshore Engineering and Future Trends Introduction CD-adapco is developing simulation capabilities in STAR-CCM+ specifically for marine and offshore
Coupled Simulation of Flow and Body Motion Using Overset Grids. Eberhard Schreck & Milovan Perić
 Coupled Simulation of Flow and Body Motion Using Overset Grids Eberhard Schreck & Milovan Perić Contents Dynamic Fluid-Body Interaction (DFBI) model in STAR-CCM+ Overset grids method in STAR-CCM+ Advantages
Coupled Simulation of Flow and Body Motion Using Overset Grids Eberhard Schreck & Milovan Perić Contents Dynamic Fluid-Body Interaction (DFBI) model in STAR-CCM+ Overset grids method in STAR-CCM+ Advantages
Pure Drift of Surface Combatant DTMB 5415 Free to Sink, Roll, and Pitch: Tutorial 1
 Pure Drift of Surface Combatant DTMB 5415 Free to Sink, Roll, and Pitch: Tutorial 1 COMPUTATIONAL NAVAL HYDRODYNAMICS Surface Combatant 5512 at 0, 10, and 20 Degree Static Drift Conditions Gregory Dooley,
Pure Drift of Surface Combatant DTMB 5415 Free to Sink, Roll, and Pitch: Tutorial 1 COMPUTATIONAL NAVAL HYDRODYNAMICS Surface Combatant 5512 at 0, 10, and 20 Degree Static Drift Conditions Gregory Dooley,
ITTC Recommended Procedures and Guidelines. ITTC Quality System Manual. Recommended Procedures and Guidelines. Captive Model Test
 Page 1 of 26 ITTC Quality System Manual Recommended Procedure 7.5 Process Control Testing and Extrapolation Methods -06 Manoeuvrability Note of concern: In the opinion of the ITTC Advisory Council, this
Page 1 of 26 ITTC Quality System Manual Recommended Procedure 7.5 Process Control Testing and Extrapolation Methods -06 Manoeuvrability Note of concern: In the opinion of the ITTC Advisory Council, this
Simulating Sinkage & Trim for Planing Boat Hulls. A Fluent Dynamic Mesh 6DOF Tutorial
 Simulating Sinkage & Trim for Planing Boat Hulls A Fluent Dynamic Mesh 6DOF Tutorial 1 Introduction Workshop Description This workshop describes how to perform a transient 2DOF simulation of a planing
Simulating Sinkage & Trim for Planing Boat Hulls A Fluent Dynamic Mesh 6DOF Tutorial 1 Introduction Workshop Description This workshop describes how to perform a transient 2DOF simulation of a planing
Validation of an Unstructured Overset Mesh Method for CFD Analysis of Store Separation D. Snyder presented by R. Fitzsimmons
 Validation of an Unstructured Overset Mesh Method for CFD Analysis of Store Separation D. Snyder presented by R. Fitzsimmons Stores Separation Introduction Flight Test Expensive, high-risk, sometimes catastrophic
Validation of an Unstructured Overset Mesh Method for CFD Analysis of Store Separation D. Snyder presented by R. Fitzsimmons Stores Separation Introduction Flight Test Expensive, high-risk, sometimes catastrophic
ITTC Recommended Procedures and Guidelines
 7.5 - Page 1 of 11 Table of Contents Simulation Models.... 2 1. PURPOSE OF PROCEDURE... 2 2. INTRODUCTION... 2 3. DOCUMENTATION OF A MANOEUVRING SIMULATION MODEL... 3 3.1 Ship Particulars... 3 3.2 Prediction
7.5 - Page 1 of 11 Table of Contents Simulation Models.... 2 1. PURPOSE OF PROCEDURE... 2 2. INTRODUCTION... 2 3. DOCUMENTATION OF A MANOEUVRING SIMULATION MODEL... 3 3.1 Ship Particulars... 3 3.2 Prediction
STAR-CCM+ overset mesh
 STAR-CCM+ overset mesh Providing increased modeling accuracy, reduced simulation time and improved designs Benefits Improves modeling accuracy with realistic motions Reduces design time through automated
STAR-CCM+ overset mesh Providing increased modeling accuracy, reduced simulation time and improved designs Benefits Improves modeling accuracy with realistic motions Reduces design time through automated
SIMULATION OF FLOW AROUND KCS-HULL
 SIMULATION OF FLOW AROUND KCS-HULL Sven Enger (CD-adapco, Germany) Milovan Perić (CD-adapco, Germany) Robinson Perić (University of Erlangen-Nürnberg, Germany) 1.SUMMARY The paper describes results of
SIMULATION OF FLOW AROUND KCS-HULL Sven Enger (CD-adapco, Germany) Milovan Perić (CD-adapco, Germany) Robinson Perić (University of Erlangen-Nürnberg, Germany) 1.SUMMARY The paper describes results of
RANSE Simulations of Surface Piercing Propellers
 RANSE Simulations of Surface Piercing Propellers Mario Caponnetto, Rolla Research, mariocaponnetto@hotmail.com RANSE methods have been applied to the analysis of ship propellers in open-water condition
RANSE Simulations of Surface Piercing Propellers Mario Caponnetto, Rolla Research, mariocaponnetto@hotmail.com RANSE methods have been applied to the analysis of ship propellers in open-water condition
CFD prediction of hull manoeuvering forces
 CFD prediction of hull manoeuvering forces Chad Oldfield Roham Larmaei STX Marine Prepared By: STX Marine Suite 1502, 85 Albert Street Ottawa, ON K1P 6A4 Contractor's Document Number: 181-050-04, Rev 2
CFD prediction of hull manoeuvering forces Chad Oldfield Roham Larmaei STX Marine Prepared By: STX Marine Suite 1502, 85 Albert Street Ottawa, ON K1P 6A4 Contractor's Document Number: 181-050-04, Rev 2
Numerical Estimation and Validation of Shallow Draft Effect on Roll Damping
 The 14 th International Ship Stability Workshop (ISSW), 29 th September- 1 st October 2014, Kuala Lumpur, Malaysia Numerical Estimation and Validation of Shallow Draft Effect on Roll Damping Toru Katayama
The 14 th International Ship Stability Workshop (ISSW), 29 th September- 1 st October 2014, Kuala Lumpur, Malaysia Numerical Estimation and Validation of Shallow Draft Effect on Roll Damping Toru Katayama
Advances in Simulation for Marine And Offshore Applications. Milovan Perić
 Advances in Simulation for Marine And Offshore Applications Milovan Perić Introduction Extensions and enhancements in STAR-CCM+ for marine and offshore applications: Creation of irregular long-crested
Advances in Simulation for Marine And Offshore Applications Milovan Perić Introduction Extensions and enhancements in STAR-CCM+ for marine and offshore applications: Creation of irregular long-crested
SIMULATION OF PROPELLER-SHIP HULL INTERACTION USING AN INTEGRATED VLM/RANSE SOLVER MODELING.
 SIMULATION OF PROPELLER-SHIP HULL INTERACTION USING AN INTEGRATED VLM/RANSE SOLVER MODELING. M.N.Senthil Prakash, Department of Ocean Engineering, IIT Madras, India V. Anantha Subramanian Department of
SIMULATION OF PROPELLER-SHIP HULL INTERACTION USING AN INTEGRATED VLM/RANSE SOLVER MODELING. M.N.Senthil Prakash, Department of Ocean Engineering, IIT Madras, India V. Anantha Subramanian Department of
ITTC Recommended Procedures Testing and Extrapolation Methods Manoeuvrability Validation of Manoeuvring Simulation Models
 Page 1 of 11 CONTENTS 1 PURPOSE OF PROCEDURE 2 INTRODUCTION 3 PROCEDURE FOR VALIDATION OF A MANOEUVRING SIMULATION MODEL 3.1 The Report 3.2 Prediction of Forces 3.3 Modelling of Forces in the Mathematical
Page 1 of 11 CONTENTS 1 PURPOSE OF PROCEDURE 2 INTRODUCTION 3 PROCEDURE FOR VALIDATION OF A MANOEUVRING SIMULATION MODEL 3.1 The Report 3.2 Prediction of Forces 3.3 Modelling of Forces in the Mathematical
ITTC Recommended Procedures and Guidelines
 7.5-02 -06- Page 1 of 11 Table of Contents 1. PURPOSE OF PROCEDURE... 2 2. INTRODUCTION... 2 3. DOCUMENTATION OF A MANOEUVRING SIMULATION MODEL... 3 3.1 Ship Particulars... 3 3.2 Prediction of the Hydrodynamic
7.5-02 -06- Page 1 of 11 Table of Contents 1. PURPOSE OF PROCEDURE... 2 2. INTRODUCTION... 2 3. DOCUMENTATION OF A MANOEUVRING SIMULATION MODEL... 3 3.1 Ship Particulars... 3 3.2 Prediction of the Hydrodynamic
A Simplified Vehicle and Driver Model for Vehicle Systems Development
 A Simplified Vehicle and Driver Model for Vehicle Systems Development Martin Bayliss Cranfield University School of Engineering Bedfordshire MK43 0AL UK Abstract For the purposes of vehicle systems controller
A Simplified Vehicle and Driver Model for Vehicle Systems Development Martin Bayliss Cranfield University School of Engineering Bedfordshire MK43 0AL UK Abstract For the purposes of vehicle systems controller
Marine Hydrodynamics Solver in OpenFOAM
 Marine Hydrodynamics Solver in OpenFOAM p. 1/14 Marine Hydrodynamics Solver in OpenFOAM Hrvoje Jasak and Henrik Rusche h.jasak@wikki.co.uk, h.rusche@wikki.co.uk Wikki, United Kingdom and Germany 4 December
Marine Hydrodynamics Solver in OpenFOAM p. 1/14 Marine Hydrodynamics Solver in OpenFOAM Hrvoje Jasak and Henrik Rusche h.jasak@wikki.co.uk, h.rusche@wikki.co.uk Wikki, United Kingdom and Germany 4 December
DEVELOPMENT OF NUMERICAL TOOL FOR HYDRODYNAMICS SIMULATION OF HIGH SPEED PLANING CRAFTS
 DEVELOPMENT OF NUMERICAL TOOL FOR HYDRODYNAMICS SIMULATION OF HIGH SPEED PLANING CRAFTS Ebrahim Jahanbakhsh Marine Lab., Sharif Uni. of Tech., Tehran/Iran, ebrahim_jahan@yahoo.com Roozbeh Panahi Tarbiat
DEVELOPMENT OF NUMERICAL TOOL FOR HYDRODYNAMICS SIMULATION OF HIGH SPEED PLANING CRAFTS Ebrahim Jahanbakhsh Marine Lab., Sharif Uni. of Tech., Tehran/Iran, ebrahim_jahan@yahoo.com Roozbeh Panahi Tarbiat
Prediction of Warship Manoeuvring Coefficients using CFD
 Prediction of Warship Manoeuvring Coefficients using CFD C. Oldfield 1, M. Moradi Larmaei 1, A. Kendrick 1 (M), K. McTaggart 2 (M) 1. Vard Marine Inc. 2. Defence Research and Development Canada DRDC-RDDC-2015-P169
Prediction of Warship Manoeuvring Coefficients using CFD C. Oldfield 1, M. Moradi Larmaei 1, A. Kendrick 1 (M), K. McTaggart 2 (M) 1. Vard Marine Inc. 2. Defence Research and Development Canada DRDC-RDDC-2015-P169
RBF Morph An Add-on Module for Mesh Morphing in ANSYS Fluent
 RBF Morph An Add-on Module for Mesh Morphing in ANSYS Fluent Gilles Eggenspieler Senior Product Manager 1 Morphing & Smoothing A mesh morpher is a tool capable of performing mesh modifications in order
RBF Morph An Add-on Module for Mesh Morphing in ANSYS Fluent Gilles Eggenspieler Senior Product Manager 1 Morphing & Smoothing A mesh morpher is a tool capable of performing mesh modifications in order
Direct simulation of zigzag maneuver for fully appended ship
 Direct simulation of zigzag maneuver for fully appended ship Jianhua Wang, Decheng Wan * State Key Laboratory of Ocean Engineering, School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiao
Direct simulation of zigzag maneuver for fully appended ship Jianhua Wang, Decheng Wan * State Key Laboratory of Ocean Engineering, School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiao
Evaluation of hydrodynamic coefficients on riser floaters using CFD
 Evaluation of hydrodynamic coefficients on riser floaters using CFD Erico Santos, Pedro Mendes, Bruno Luna PETROBRAS (CENPES/PDEP/TDUT) Ricardo Damian ESSS AGENDA MOTIVATION PROCEADURE OVERVIEW RISER GLOBAL
Evaluation of hydrodynamic coefficients on riser floaters using CFD Erico Santos, Pedro Mendes, Bruno Luna PETROBRAS (CENPES/PDEP/TDUT) Ricardo Damian ESSS AGENDA MOTIVATION PROCEADURE OVERVIEW RISER GLOBAL
ITTC Recommended Procedures and Guidelines
 Page 1 of 9 Table of Contents 1. OVERVIEW... 2 2. CHOICE OF MODEL OR FULL SCALE... 2 3. NOMINAL WAKE IN MODEL SCALE... 3 3.1 Pre-processing... 3 3.1.1 Geometry... 3 3.1.2 Computational Domain and Boundary
Page 1 of 9 Table of Contents 1. OVERVIEW... 2 2. CHOICE OF MODEL OR FULL SCALE... 2 3. NOMINAL WAKE IN MODEL SCALE... 3 3.1 Pre-processing... 3 3.1.1 Geometry... 3 3.1.2 Computational Domain and Boundary
CFD Application in Offshore Structures Design at PETROBRAS
 CFD Application in Offshore Structures Design at PETROBRAS Marcus Reis ESSS CFD Director Mooring System Design of Floating Production Systems; Current and Wind Loads; Wave Induced Drag Coefficients. Case
CFD Application in Offshore Structures Design at PETROBRAS Marcus Reis ESSS CFD Director Mooring System Design of Floating Production Systems; Current and Wind Loads; Wave Induced Drag Coefficients. Case
Auto Injector Syringe. A Fluent Dynamic Mesh 1DOF Tutorial
 Auto Injector Syringe A Fluent Dynamic Mesh 1DOF Tutorial 1 2015 ANSYS, Inc. June 26, 2015 Prerequisites This tutorial is written with the assumption that You have attended the Introduction to ANSYS Fluent
Auto Injector Syringe A Fluent Dynamic Mesh 1DOF Tutorial 1 2015 ANSYS, Inc. June 26, 2015 Prerequisites This tutorial is written with the assumption that You have attended the Introduction to ANSYS Fluent
Eng Ship Structures 1 L E C T U R E 1 0 : F I N I T E E L E M E N T T E C H N I Q U E S I N S H I P S T R U C T U R A L D E S I G N
 Eng. 6002 Ship Structures 1 L E C T U R E 1 0 : F I N I T E E L E M E N T T E C H N I Q U E S I N S H I P S T R U C T U R A L D E S I G N Contents Introduction Linear Analysis Static Non-linear Analysis
Eng. 6002 Ship Structures 1 L E C T U R E 1 0 : F I N I T E E L E M E N T T E C H N I Q U E S I N S H I P S T R U C T U R A L D E S I G N Contents Introduction Linear Analysis Static Non-linear Analysis
Enabling the Prediction of Manoeuvring Characteristics of a Submarine Operating Near the Free Surface
 Enabling the Prediction of Manoeuvring Characteristics of a Submarine Operating Near the Free Surface ABSTRACT C Polis 1, D Ranmuthugala 1, J Duffy 1, M Renilson 1,2 1. Australian Maritime College, 2.
Enabling the Prediction of Manoeuvring Characteristics of a Submarine Operating Near the Free Surface ABSTRACT C Polis 1, D Ranmuthugala 1, J Duffy 1, M Renilson 1,2 1. Australian Maritime College, 2.
ITTC Recommended Procedures and Guidelines
 Page of 20 Captive Model Test Procedure 04 Table of Contents. PURPOSE OF PROCEDURE... 3 2. DESCRIPTION OF PROCEDURE... 4 2. Preparation... 4 2.. Selection of model dimensions.... 4 2... Scale... 4 2...2
Page of 20 Captive Model Test Procedure 04 Table of Contents. PURPOSE OF PROCEDURE... 3 2. DESCRIPTION OF PROCEDURE... 4 2. Preparation... 4 2.. Selection of model dimensions.... 4 2... Scale... 4 2...2
Numerical Modeling of Ship-Propeller Interaction under Self-Propulsion Condition
 STAR Global Conference 2014 Vienna, Austria, March 17-19 Numerical Modeling of Ship-Propeller Interaction under Self-Propulsion Condition Vladimir Krasilnikov Department of Ship Technology, MARINTEK Trondheim,
STAR Global Conference 2014 Vienna, Austria, March 17-19 Numerical Modeling of Ship-Propeller Interaction under Self-Propulsion Condition Vladimir Krasilnikov Department of Ship Technology, MARINTEK Trondheim,
Offshore Platform Fluid Structure Interaction (FSI) Simulation
 Simulation") Offshore Platform Fluid Structure Interaction (FSI) Simulation Ali Marzaban, CD-adapco Murthy Lakshmiraju, CD-adapco Nigel Richardson, CD-adapco Mike Henneke, CD-adapco Guangyu Wu, Chevron Pedro M. Vargas,
Offshore Platform Fluid Structure Interaction (FSI) Simulation Ali Marzaban, CD-adapco Murthy Lakshmiraju, CD-adapco Nigel Richardson, CD-adapco Mike Henneke, CD-adapco Guangyu Wu, Chevron Pedro M. Vargas,
VALIDATION AND VERIFICATION OF HULL RESISTANCE COMPONENTS USING A COMMERCIAL CFD CODE SUMMARY
 VALIDATION AND VERIFICATION OF HULL RESISTANCE COMPONENTS USING A COMMERCIAL CFD CODE C.A. Perez G, University of Southampton, UK. Universidad Pontificia Bolivariana, Colombia, M. Tan and P.A. Wilson University
VALIDATION AND VERIFICATION OF HULL RESISTANCE COMPONENTS USING A COMMERCIAL CFD CODE C.A. Perez G, University of Southampton, UK. Universidad Pontificia Bolivariana, Colombia, M. Tan and P.A. Wilson University
Validation of Flow-3D against Experimental Data for an Axi-Symmetric Point Absorber WEC
 Validation of Flow-3D against Experimental Data for an Axi-Symmetric Point Absorber WEC Peter Arnold ( Senior Research Engineer Wavebob) January 23 rd 2013 1 Motivation Validation is defined as substantiation
Validation of Flow-3D against Experimental Data for an Axi-Symmetric Point Absorber WEC Peter Arnold ( Senior Research Engineer Wavebob) January 23 rd 2013 1 Motivation Validation is defined as substantiation
ITTC Recommended Procedures and Guidelines
 Page 1 of 7 Table of Contents 1. PURPOSE OF GUIDELINE... 2 2. PARAMETERS... 2 2.1 Basic Measurement Quantities... 2 2.2 Derived Parameters... 2 3. DIRECT SIMULATION OF A TARGET WAKE FIELD... 3 4. EXPERIMENTAL
Page 1 of 7 Table of Contents 1. PURPOSE OF GUIDELINE... 2 2. PARAMETERS... 2 2.1 Basic Measurement Quantities... 2 2.2 Derived Parameters... 2 3. DIRECT SIMULATION OF A TARGET WAKE FIELD... 3 4. EXPERIMENTAL
Optimate CFD Evaluation Optimate Glider Optimization Case
 Optimate CFD Evaluation Optimate Glider Optimization Case Authors: Nathan Richardson LMMFC CFD Lead 1 Purpose For design optimization, the gold standard would be to put in requirements and have algorithm
Optimate CFD Evaluation Optimate Glider Optimization Case Authors: Nathan Richardson LMMFC CFD Lead 1 Purpose For design optimization, the gold standard would be to put in requirements and have algorithm
Aurélien Thinat Stéphane Cordier 1, François Cany
 SimHydro 2012:New trends in simulation - Hydroinformatics and 3D modeling, 12-14 September 2012, Nice Aurélien Thinat, Stéphane Cordier, François Cany Application of OpenFOAM to the study of wave loads
SimHydro 2012:New trends in simulation - Hydroinformatics and 3D modeling, 12-14 September 2012, Nice Aurélien Thinat, Stéphane Cordier, François Cany Application of OpenFOAM to the study of wave loads
Computational Fluid Dynamics Simulation of a Rim Driven Thruster
 Computational Fluid Dynamics Simulation of a Rim Driven Thruster Aleksander J Dubas, N. W. Bressloff, H. Fangohr, S. M. Sharkh (University of Southampton) Abstract An electric rim driven thruster is a
Computational Fluid Dynamics Simulation of a Rim Driven Thruster Aleksander J Dubas, N. W. Bressloff, H. Fangohr, S. M. Sharkh (University of Southampton) Abstract An electric rim driven thruster is a
Transactions on Modelling and Simulation vol 10, 1995 WIT Press, ISSN X
 Hydrodynamic coefficients and motions due to a floating cylinder in waves D.D. Bhatta, M. Rahman Department of Applied Mathematics, Technical University of Nova Scotia, Halifax, Nova Scotia, Canada B3J
Hydrodynamic coefficients and motions due to a floating cylinder in waves D.D. Bhatta, M. Rahman Department of Applied Mathematics, Technical University of Nova Scotia, Halifax, Nova Scotia, Canada B3J
ITTC Recommended Procedures and Guidelines
 Page 1 of 13 Table of Contents Codes in the Frequency Domain... 2 1. PURPOSE OF PROCEDURE... 2 2. SCOPE... 2 2.1 Present Theoretical Limitations... 4 2.2 Numerical Aspects... 4 2.3 Software Engineering
Page 1 of 13 Table of Contents Codes in the Frequency Domain... 2 1. PURPOSE OF PROCEDURE... 2 2. SCOPE... 2 2.1 Present Theoretical Limitations... 4 2.2 Numerical Aspects... 4 2.3 Software Engineering
AUTONOMOUS PLANETARY ROVER CONTROL USING INVERSE SIMULATION
 AUTONOMOUS PLANETARY ROVER CONTROL USING INVERSE SIMULATION Kevin Worrall (1), Douglas Thomson (1), Euan McGookin (1), Thaleia Flessa (1) (1)University of Glasgow, Glasgow, G12 8QQ, UK, Email: kevin.worrall@glasgow.ac.uk
AUTONOMOUS PLANETARY ROVER CONTROL USING INVERSE SIMULATION Kevin Worrall (1), Douglas Thomson (1), Euan McGookin (1), Thaleia Flessa (1) (1)University of Glasgow, Glasgow, G12 8QQ, UK, Email: kevin.worrall@glasgow.ac.uk
ITTC Recommended Procedures and Guidelines
 Page 1 of 9 Table of Contents 1. OVERVIEW... 2 2. COMPUTATIONAL PROCEDURE.. 2 2.1 Preliminaries... 2 2.2 Code and Computer... 3 2.3 Ship Geometry, Computational Domain, and Boundary Conditions... 3 2.4
Page 1 of 9 Table of Contents 1. OVERVIEW... 2 2. COMPUTATIONAL PROCEDURE.. 2 2.1 Preliminaries... 2 2.2 Code and Computer... 3 2.3 Ship Geometry, Computational Domain, and Boundary Conditions... 3 2.4
KCS Resistance Calculation
 KCS Resistance Calculation Author: Ludwig Kerner Last update: 19-09-2014 Reviewed by : Jonathan Brunel Date of Review : 19-09-2014 1 Content 0 Executive Summary 1 3 Computations 4 Test Case Description
KCS Resistance Calculation Author: Ludwig Kerner Last update: 19-09-2014 Reviewed by : Jonathan Brunel Date of Review : 19-09-2014 1 Content 0 Executive Summary 1 3 Computations 4 Test Case Description
Strömningslära Fluid Dynamics. Computer laboratories using COMSOL v4.4
 UMEÅ UNIVERSITY Department of Physics Claude Dion Olexii Iukhymenko May 15, 2015 Strömningslära Fluid Dynamics (5FY144) Computer laboratories using COMSOL v4.4!! Report requirements Computer labs must
UMEÅ UNIVERSITY Department of Physics Claude Dion Olexii Iukhymenko May 15, 2015 Strömningslära Fluid Dynamics (5FY144) Computer laboratories using COMSOL v4.4!! Report requirements Computer labs must
Application of Hydrodynamics and Dynamics Models for Efficient Operation of Modular Mini-AUVs in Shallow and Very-Shallow Waters
 Application of Hydrodynamics and Dynamics Models for Efficient Operation of Modular Mini-AUVs in Shallow and Very-Shallow Waters P. Ananthakrishnan Department of Ocean Engineering Florida Atlantic University
Application of Hydrodynamics and Dynamics Models for Efficient Operation of Modular Mini-AUVs in Shallow and Very-Shallow Waters P. Ananthakrishnan Department of Ocean Engineering Florida Atlantic University
D DAVID PUBLISHING. Uncertainty Analysis in CFD for Resistance. 1. Introduction
 Journal of Shipping and Ocean Engineering 7 (2017) 192-202 doi 10.17265/2159-5879/2017.05.003 D DAVID PUBLISHING WANG Zhongcheng 1, LIU Xiaoyu 1, ZHANG Shenglong 1, XU Leping 1 and ZHOU Peilin 2 1. MMC
Journal of Shipping and Ocean Engineering 7 (2017) 192-202 doi 10.17265/2159-5879/2017.05.003 D DAVID PUBLISHING WANG Zhongcheng 1, LIU Xiaoyu 1, ZHANG Shenglong 1, XU Leping 1 and ZHOU Peilin 2 1. MMC
Simulation of Offshore Wave Impacts with a Volume of Fluid Method. Tim Bunnik Tim Bunnik MARIN
 Simulation of Offshore Wave Impacts with a Volume of Fluid Method Tim Bunnik Tim Bunnik MARIN Outline Part I: Numerical method -Overview Part II: Applications - Dambreak - Wave run-up - Sloshing loads
Simulation of Offshore Wave Impacts with a Volume of Fluid Method Tim Bunnik Tim Bunnik MARIN Outline Part I: Numerical method -Overview Part II: Applications - Dambreak - Wave run-up - Sloshing loads
Comparison of model tests and calculations
 Comparison of model tests and calculations Experimental Methods in Marine Hydrodynamics Lecture in week 45 Covers chapter 12 in the lecture notes 1 Contents Validation or verification? Numerical vs. Physical
Comparison of model tests and calculations Experimental Methods in Marine Hydrodynamics Lecture in week 45 Covers chapter 12 in the lecture notes 1 Contents Validation or verification? Numerical vs. Physical
EXPERIMENTAL VALIDATION OF STAR-CCM+ FOR LIQUID CONTAINER SLOSH DYNAMICS
 EXPERIMENTAL VALIDATION OF STAR-CCM+ FOR LIQUID CONTAINER SLOSH DYNAMICS Brandon Marsell a.i. solutions, Launch Services Program, Kennedy Space Center, FL 1 Agenda Introduction Problem Background Experiment
EXPERIMENTAL VALIDATION OF STAR-CCM+ FOR LIQUID CONTAINER SLOSH DYNAMICS Brandon Marsell a.i. solutions, Launch Services Program, Kennedy Space Center, FL 1 Agenda Introduction Problem Background Experiment
Recent Advances in Modelling Wind Parks in STAR CCM+ Steve Evans
 Recent Advances in Modelling Wind Parks in STAR CCM+ Steve Evans Introduction Company STAR-CCM+ Agenda Wind engineering at CD-adapco STAR-CCM+ & EnviroWizard Developments for Offshore Simulation CD-adapco:
Recent Advances in Modelling Wind Parks in STAR CCM+ Steve Evans Introduction Company STAR-CCM+ Agenda Wind engineering at CD-adapco STAR-CCM+ & EnviroWizard Developments for Offshore Simulation CD-adapco:
Potsdam Propeller Test Case (PPTC)
") Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 Workshop: Propeller performance Potsdam Propeller Test Case (PPTC) Olof Klerebrant Klasson 1, Tobias Huuva 2 1 Core
Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 Workshop: Propeller performance Potsdam Propeller Test Case (PPTC) Olof Klerebrant Klasson 1, Tobias Huuva 2 1 Core
Computational Fluid Dynamics PRODUCT SHEET
 TM 2014 Computational Fluid Dynamics PRODUCT SHEET 1 Breaking Limitations The Challenge of Traditional CFD In the traditional mesh-based approach, the reliability highly depends on the quality of the mesh,
TM 2014 Computational Fluid Dynamics PRODUCT SHEET 1 Breaking Limitations The Challenge of Traditional CFD In the traditional mesh-based approach, the reliability highly depends on the quality of the mesh,
CFD-BASED NUMERICAL SIMULATION OF SELF-PROPULSION FOR JAPAN BULK CARRIER
 CFD-BASED NUMERICAL SIMULATION OF SELF-PROPULSION FOR JAPAN BULK CARRIER Jianwei Wu(Shanghai Jiao Tong University, State Key Laboratory of Ocean Engineering, Collaborative Innovation Center for Advanced
CFD-BASED NUMERICAL SIMULATION OF SELF-PROPULSION FOR JAPAN BULK CARRIER Jianwei Wu(Shanghai Jiao Tong University, State Key Laboratory of Ocean Engineering, Collaborative Innovation Center for Advanced
THE BENEFIT OF ANSA TOOLS IN THE DALLARA CFD PROCESS. Simona Invernizzi, Dallara Engineering, Italy,
 THE BENEFIT OF ANSA TOOLS IN THE DALLARA CFD PROCESS Simona Invernizzi, Dallara Engineering, Italy, KEYWORDS automatic tools, batch mesh, DFM, morphing, ride height maps ABSTRACT In the last few years,
THE BENEFIT OF ANSA TOOLS IN THE DALLARA CFD PROCESS Simona Invernizzi, Dallara Engineering, Italy, KEYWORDS automatic tools, batch mesh, DFM, morphing, ride height maps ABSTRACT In the last few years,
VALIDATION METHODOLOGY FOR SIMULATION SOFTWARE OF SHIP BEHAVIOUR IN EXTREME SEAS
 10 th International Conference 409 VALIDATION METHODOLOGY FOR SIMULATION SOFTWARE OF SHIP BEHAVIOUR IN EXTREME SEAS Stefan Grochowalski, Polish Register of Shipping, S.Grochowalski@prs.pl Jan Jankowski,
10 th International Conference 409 VALIDATION METHODOLOGY FOR SIMULATION SOFTWARE OF SHIP BEHAVIOUR IN EXTREME SEAS Stefan Grochowalski, Polish Register of Shipping, S.Grochowalski@prs.pl Jan Jankowski,
Numerical study on a KVLCC2 model advancing in shallow water
 Yuan, Zhi-Ming and Kellett, Paula (2015) Numerical study on a KVLCC2 model advancing in shallow water. In: 9th International Workshop on Ship and Marine Hydrodynamics, 2015-08-25-2015-08-28, University
Yuan, Zhi-Ming and Kellett, Paula (2015) Numerical study on a KVLCC2 model advancing in shallow water. In: 9th International Workshop on Ship and Marine Hydrodynamics, 2015-08-25-2015-08-28, University
Introduction to C omputational F luid Dynamics. D. Murrin
 Introduction to C omputational F luid Dynamics D. Murrin Computational fluid dynamics (CFD) is the science of predicting fluid flow, heat transfer, mass transfer, chemical reactions, and related phenomena
Introduction to C omputational F luid Dynamics D. Murrin Computational fluid dynamics (CFD) is the science of predicting fluid flow, heat transfer, mass transfer, chemical reactions, and related phenomena
MSC Software Aeroelastic Tools. Mike Coleman and Fausto Gill di Vincenzo
 MSC Software Aeroelastic Tools Mike Coleman and Fausto Gill di Vincenzo MSC Software Confidential 2 MSC Software Confidential 3 MSC Software Confidential 4 MSC Software Confidential 5 MSC Flightloads An
MSC Software Aeroelastic Tools Mike Coleman and Fausto Gill di Vincenzo MSC Software Confidential 2 MSC Software Confidential 3 MSC Software Confidential 4 MSC Software Confidential 5 MSC Flightloads An
CDA Workshop Physical & Numerical Hydraulic Modelling. STAR-CCM+ Presentation
 CDA Workshop Physical & Numerical Hydraulic Modelling STAR-CCM+ Presentation ENGINEERING SIMULATION CFD FEA Mission Increase the competitiveness of companies through optimization of their product development
CDA Workshop Physical & Numerical Hydraulic Modelling STAR-CCM+ Presentation ENGINEERING SIMULATION CFD FEA Mission Increase the competitiveness of companies through optimization of their product development
CONSIDERATIONS IN BUILDING AND USING DREDGE SIMULATORS
 CONSIDERATIONS IN BUILDING AND USING DREDGE SIMULATORS S.A. Miedema ABSTRACT. INTRODUCTION. THE EDUCATIONAL SIMULATOR. THE TRAINING SIMULATOR. THE PREDICTION SIMULATOR. THE PREPARATION SIMULATOR. THE RESEARCH
CONSIDERATIONS IN BUILDING AND USING DREDGE SIMULATORS S.A. Miedema ABSTRACT. INTRODUCTION. THE EDUCATIONAL SIMULATOR. THE TRAINING SIMULATOR. THE PREDICTION SIMULATOR. THE PREPARATION SIMULATOR. THE RESEARCH
SOFTWARE. Sesam user course. 20 February 2017 Wadam - General wave load analysis. Ungraded SAFER, SMARTER, GREENER DNV GL 2014
 SOFTWARE Sesam user course DNV GL 1 SAFER, SMARTER, GREENER Wave Analysis by Diffraction And Morison theory Computation of wave loads and global response 2 Diffraction & radiation theory Structural part
SOFTWARE Sesam user course DNV GL 1 SAFER, SMARTER, GREENER Wave Analysis by Diffraction And Morison theory Computation of wave loads and global response 2 Diffraction & radiation theory Structural part
Metafor FE Software. 2. Operator split. 4. Rezoning methods 5. Contact with friction
 ALE simulations ua sus using Metafor eao 1. Introduction 2. Operator split 3. Convection schemes 4. Rezoning methods 5. Contact with friction 1 Introduction EULERIAN FORMALISM Undistorted mesh Ideal for
ALE simulations ua sus using Metafor eao 1. Introduction 2. Operator split 3. Convection schemes 4. Rezoning methods 5. Contact with friction 1 Introduction EULERIAN FORMALISM Undistorted mesh Ideal for
Accurate and Efficient Turbomachinery Simulation. Chad Custer, PhD Turbomachinery Technical Specialist
 Accurate and Efficient Turbomachinery Simulation Chad Custer, PhD Turbomachinery Technical Specialist Outline Turbomachinery simulation advantages Axial fan optimization Description of design objectives
Accurate and Efficient Turbomachinery Simulation Chad Custer, PhD Turbomachinery Technical Specialist Outline Turbomachinery simulation advantages Axial fan optimization Description of design objectives
Simulation of a Free Surface Flow over a Container Vessel Using CFD
 Simulation of a Free Surface Flow over a Container Vessel Using CFD Krishna Atreyapurapu 1 Bhanuprakash Tallapragada 2 Kiran Voonna 3 M.E Student Professor Manager Dept. of Marine Engineering Dept. of
Simulation of a Free Surface Flow over a Container Vessel Using CFD Krishna Atreyapurapu 1 Bhanuprakash Tallapragada 2 Kiran Voonna 3 M.E Student Professor Manager Dept. of Marine Engineering Dept. of
Introduction. Chapter 1. Contents. 1.1 Background
 1 Introduction Chapter 1 Contents 1.1 Background 1.2 Two-Part Towing System 1.3 Overall objectives 1.4 Scope of the present study 1.5 Methodology 1.6 Organization of the Report 1.1 Background As an effective
1 Introduction Chapter 1 Contents 1.1 Background 1.2 Two-Part Towing System 1.3 Overall objectives 1.4 Scope of the present study 1.5 Methodology 1.6 Organization of the Report 1.1 Background As an effective
RANS Based Analysis of Roll Damping Moments at Bilge Keels
 RANS Based Analysis of Roll Damping Moments at Bilge Keels Florian Kluwe (kluwe@tu-harburg.de), Daniel Schmode, Gerhard Jensen Introduction The simulation of ship motions in seaways gets increasing relevance
RANS Based Analysis of Roll Damping Moments at Bilge Keels Florian Kluwe (kluwe@tu-harburg.de), Daniel Schmode, Gerhard Jensen Introduction The simulation of ship motions in seaways gets increasing relevance
Validation of CFD Simulation for Ship Roll Damping using one Pure Car Carrier and one Standard Model
 Proceedings of the 15 th International Ship Stability Workshop, 13-15June 2016, Stockholm, Sweden 1 Validation of CFD Simulation for Ship Roll Damping using one Pure Car Carrier and one Standard Model
Proceedings of the 15 th International Ship Stability Workshop, 13-15June 2016, Stockholm, Sweden 1 Validation of CFD Simulation for Ship Roll Damping using one Pure Car Carrier and one Standard Model
6DOF RANS Simulations of Floating and Submerged Bodies using OpenFOAM
 6DOF RANS Simulations of Floating and Submerged Bodies using OpenFOAM Eric Paterson, David Boger, Kevin Smith, Scott Miller, and Gina Casadei Applied Research Laboratory, Penn State Univ, State College,
6DOF RANS Simulations of Floating and Submerged Bodies using OpenFOAM Eric Paterson, David Boger, Kevin Smith, Scott Miller, and Gina Casadei Applied Research Laboratory, Penn State Univ, State College,
Comparison of open-source code Nemoh with Wamit for cargo ship motions in shallow water
 Comparison of open-source code Nemoh with Wamit for cargo ship motions in shallow water G.Parisella 1 and T.P.Gourlay 2 Centre for Marine Science and Technology, Curtin University Research report 2016-23,
Comparison of open-source code Nemoh with Wamit for cargo ship motions in shallow water G.Parisella 1 and T.P.Gourlay 2 Centre for Marine Science and Technology, Curtin University Research report 2016-23,
Numerical Simulation of the Self-Propulsion Model Tests
 Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 Numerical Simulation of the Self-Propulsion Model Tests Tomasz Bugalski, Paweł Hoffmann 1 1 Ship Design and Research
Second International Symposium on Marine Propulsors smp 11, Hamburg, Germany, June 2011 Numerical Simulation of the Self-Propulsion Model Tests Tomasz Bugalski, Paweł Hoffmann 1 1 Ship Design and Research
Optimal design of floating platform and substructure for a spar type wind turbine system
 The 2012 World Congress on Advances in Civil, Environmental, and Materials Research (ACEM 12) Seoul, Korea, August 26-30, 2012 Optimal design of floating platform and substructure for a spar type wind
The 2012 World Congress on Advances in Civil, Environmental, and Materials Research (ACEM 12) Seoul, Korea, August 26-30, 2012 Optimal design of floating platform and substructure for a spar type wind
Missile External Aerodynamics Using Star-CCM+ Star European Conference 03/22-23/2011
 Missile External Aerodynamics Using Star-CCM+ Star European Conference 03/22-23/2011 StarCCM_StarEurope_2011 4/6/11 1 Overview 2 Role of CFD in Aerodynamic Analyses Classical aerodynamics / Semi-Empirical
Missile External Aerodynamics Using Star-CCM+ Star European Conference 03/22-23/2011 StarCCM_StarEurope_2011 4/6/11 1 Overview 2 Role of CFD in Aerodynamic Analyses Classical aerodynamics / Semi-Empirical
DrivAer-Aerodynamic Investigations for a New Realistic Generic Car Model using ANSYS CFD
 DrivAer-Aerodynamic Investigations for a New Realistic Generic Car Model using ANSYS CFD Thomas Frank (*), BenediktGerlicher (*), Juan Abanto (**) (*) ANSYS Germany, Otterfing, Germany (**) ANSYS Inc.,
DrivAer-Aerodynamic Investigations for a New Realistic Generic Car Model using ANSYS CFD Thomas Frank (*), BenediktGerlicher (*), Juan Abanto (**) (*) ANSYS Germany, Otterfing, Germany (**) ANSYS Inc.,
Express Introductory Training in ANSYS Fluent Workshop 06 Using Moving Reference Frames and Sliding Meshes
 Express Introductory Training in ANSYS Fluent Workshop 06 Using Moving Reference Frames and Sliding Meshes Dimitrios Sofialidis Technical Manager, SimTec Ltd. Mechanical Engineer, PhD PRACE Autumn School
Express Introductory Training in ANSYS Fluent Workshop 06 Using Moving Reference Frames and Sliding Meshes Dimitrios Sofialidis Technical Manager, SimTec Ltd. Mechanical Engineer, PhD PRACE Autumn School
DNV GL s 16th Technology Week
 OIL & GAS DNV GL s 16th Technology Week Advanced Simulation for Offshore Application: Application of CFD for Computing VIM of Floating Structures 1 SAFER, SMARTER, GREENER OUTLINE Introduction Elements
OIL & GAS DNV GL s 16th Technology Week Advanced Simulation for Offshore Application: Application of CFD for Computing VIM of Floating Structures 1 SAFER, SMARTER, GREENER OUTLINE Introduction Elements
COMPUTATIONAL FLUID DYNAMICS ANALYSIS OF ORIFICE PLATE METERING SITUATIONS UNDER ABNORMAL CONFIGURATIONS
 COMPUTATIONAL FLUID DYNAMICS ANALYSIS OF ORIFICE PLATE METERING SITUATIONS UNDER ABNORMAL CONFIGURATIONS Dr W. Malalasekera Version 3.0 August 2013 1 COMPUTATIONAL FLUID DYNAMICS ANALYSIS OF ORIFICE PLATE
COMPUTATIONAL FLUID DYNAMICS ANALYSIS OF ORIFICE PLATE METERING SITUATIONS UNDER ABNORMAL CONFIGURATIONS Dr W. Malalasekera Version 3.0 August 2013 1 COMPUTATIONAL FLUID DYNAMICS ANALYSIS OF ORIFICE PLATE
CFD FOR OFFSHORE APPLICATIONS USING REFRESCO. Arjen Koop - Senior Project Manager Offshore MARIN
 CFD FOR OFFSHORE APPLICATIONS USING REFRESCO Arjen Koop - Senior Project Manager Offshore MARIN COMPUTATIONAL FLUID DYNAMICS (CFD) Advantages: Quantitative predictions Detailed insight in physical processes
CFD FOR OFFSHORE APPLICATIONS USING REFRESCO Arjen Koop - Senior Project Manager Offshore MARIN COMPUTATIONAL FLUID DYNAMICS (CFD) Advantages: Quantitative predictions Detailed insight in physical processes
SHIP S GENERAL DYNAMICS PRIORITY RESEARCH DIRECTION IN THE XXI CENTURY. CFD APPLICATIONS
 SHIP S GENERAL DYNAMICS PRIORITY RESEARCH DIRECTION IN THE XXI CENTURY. CFD APPLICATIONS Iordan NOVAC 1 Catalin FAITAR 2 1 Associate Professor Eng., Constanta Maritime University 2 Eng., Constanta Maritime
SHIP S GENERAL DYNAMICS PRIORITY RESEARCH DIRECTION IN THE XXI CENTURY. CFD APPLICATIONS Iordan NOVAC 1 Catalin FAITAR 2 1 Associate Professor Eng., Constanta Maritime University 2 Eng., Constanta Maritime
Verification of CFD analysis methods for predicting the drag force and thrust power of an underwater disk robot
 csnak, 2014 Int. J. Nav. Archit. Ocean Eng. (2014) 6:269~281 http://dx.doi.org/10.2478/ijnaoe-2013-0178 pissn: 2092-6782, eissn: 2092-6790 Verification of CFD analysis methods for predicting the drag force
csnak, 2014 Int. J. Nav. Archit. Ocean Eng. (2014) 6:269~281 http://dx.doi.org/10.2478/ijnaoe-2013-0178 pissn: 2092-6782, eissn: 2092-6790 Verification of CFD analysis methods for predicting the drag force
S T A S P M A P R O G R A M F O R S T A T I C A N A L Y S I S O F S I N G L E P O I N T M O O R E D V E S S E L S U S E R M A N U A L A N D
 STA SPM Single Point Mooring Analysis Revision 1 Page i S T A S P M A P R O G R A M F O R S T A T I C A N A L Y S I S O F S I N G L E P O I N T M O O R E D V E S S E L S U S E R M A N U A L A N D T E C
STA SPM Single Point Mooring Analysis Revision 1 Page i S T A S P M A P R O G R A M F O R S T A T I C A N A L Y S I S O F S I N G L E P O I N T M O O R E D V E S S E L S U S E R M A N U A L A N D T E C
Simulation of Turbulent Flow around an Airfoil
 1. Purpose Simulation of Turbulent Flow around an Airfoil ENGR:2510 Mechanics of Fluids and Transfer Processes CFD Lab 2 (ANSYS 17.1; Last Updated: Nov. 7, 2016) By Timur Dogan, Michael Conger, Andrew
1. Purpose Simulation of Turbulent Flow around an Airfoil ENGR:2510 Mechanics of Fluids and Transfer Processes CFD Lab 2 (ANSYS 17.1; Last Updated: Nov. 7, 2016) By Timur Dogan, Michael Conger, Andrew
Optimization of overlapping mesh calculations for simulation of paint shop manufacturing processes
 Optimization of overlapping mesh calculations for simulation of paint shop manufacturing processes STAR Global Conference, Vienna, March 17-19, 2014 Madhusudhan Devanathan Agenda 1. Simulation of Rodip
Optimization of overlapping mesh calculations for simulation of paint shop manufacturing processes STAR Global Conference, Vienna, March 17-19, 2014 Madhusudhan Devanathan Agenda 1. Simulation of Rodip
Application of Hydrodynamics and Dynamics Models for Efficient Operation of Modular Mini-AUVs in Shallow and Very Shallow Waters
 Application of Hydrodynamics and Dynamics Models for Efficient Operation of Modular Mini-AUVs in Shallow and Very Shallow Waters P. Ananthakrishnan Department of Ocean Engineering Florida Atlantic University
Application of Hydrodynamics and Dynamics Models for Efficient Operation of Modular Mini-AUVs in Shallow and Very Shallow Waters P. Ananthakrishnan Department of Ocean Engineering Florida Atlantic University
Introduction to ANSYS CFX
 Workshop 03 Fluid flow around the NACA0012 Airfoil 16.0 Release Introduction to ANSYS CFX 2015 ANSYS, Inc. March 13, 2015 1 Release 16.0 Workshop Description: The flow simulated is an external aerodynamics
Workshop 03 Fluid flow around the NACA0012 Airfoil 16.0 Release Introduction to ANSYS CFX 2015 ANSYS, Inc. March 13, 2015 1 Release 16.0 Workshop Description: The flow simulated is an external aerodynamics
COMPUTATIONAL INVESTIGATION OF FREE SURFACE FLOW AROUND A SHIP HULL
 COMPUTATIONAL INVESTIGATION OF FREE SURFACE FLOW AROUND A SHIP HULL Katuri Samarpana, Ajay konapala, Duvvada Ramesh M.V.G.R.College of Engineering / Mechanical, Vizianagaram, India ABSTRACT Ship hydrodynamics
COMPUTATIONAL INVESTIGATION OF FREE SURFACE FLOW AROUND A SHIP HULL Katuri Samarpana, Ajay konapala, Duvvada Ramesh M.V.G.R.College of Engineering / Mechanical, Vizianagaram, India ABSTRACT Ship hydrodynamics
Design and Execution of Model Experiments to Validate Numerical Modelling of 2D Ship Operations in Pack Ice
 Design and Execution of Model Experiments to Validate Numerical Modelling of 2D Ship Operations in Pack Ice Roelof C. Dragt Offshore Engineering Faculty of Mechanical, Maritime and Material Engineering
Design and Execution of Model Experiments to Validate Numerical Modelling of 2D Ship Operations in Pack Ice Roelof C. Dragt Offshore Engineering Faculty of Mechanical, Maritime and Material Engineering
FEMLAB Exercise 1 for ChE366
 FEMLAB Exercise 1 for ChE366 Problem statement Consider a spherical particle of radius r s moving with constant velocity U in an infinitely long cylinder of radius R that contains a Newtonian fluid. Let
FEMLAB Exercise 1 for ChE366 Problem statement Consider a spherical particle of radius r s moving with constant velocity U in an infinitely long cylinder of radius R that contains a Newtonian fluid. Let
INNOVATIVE CFD FOR SUPER-COMPUTER RESULTS ON YOUR DESKTOP
 INNOVATIVE CFD FOR SUPER-COMPUTER RESULTS ON YOUR DESKTOP XFlow is a next generation CFD software that uses a proprietary, particle-based, meshless approach which can easily handle traditionally complex
INNOVATIVE CFD FOR SUPER-COMPUTER RESULTS ON YOUR DESKTOP XFlow is a next generation CFD software that uses a proprietary, particle-based, meshless approach which can easily handle traditionally complex
DYNAMIC POSITIONING. September 1, Hans Cozijn
 DYNAMIC POSITIONING MARIN SOFTWARE SEMINAR SINGAPORE September 1, 2015 Hans Cozijn Senior Project Manager Offshore STATIONKEEPING USING DYNAMIC POSITIONING 2 PRESENTATION OUTLINE Dynamic Positioning Tools
DYNAMIC POSITIONING MARIN SOFTWARE SEMINAR SINGAPORE September 1, 2015 Hans Cozijn Senior Project Manager Offshore STATIONKEEPING USING DYNAMIC POSITIONING 2 PRESENTATION OUTLINE Dynamic Positioning Tools
SHAPE pilot Monotricat SRL: Hull resistance simulations for an innovative hull using OpenFOAM
 Available online at www.prace-ri.eu Partnership for Advanced Computing in Europe SHAPE pilot Monotricat SRL: Hull resistance simulations for an innovative hull using OpenFOAM Lilit Axner a,b, Jing Gong
Available online at www.prace-ri.eu Partnership for Advanced Computing in Europe SHAPE pilot Monotricat SRL: Hull resistance simulations for an innovative hull using OpenFOAM Lilit Axner a,b, Jing Gong
Ryian Hunter MAE 598
 Setup: The initial geometry was produced using the engineering schematics provided in the project assignment document using the ANSYS DesignModeler application taking advantage of system symmetry. Fig.
Setup: The initial geometry was produced using the engineering schematics provided in the project assignment document using the ANSYS DesignModeler application taking advantage of system symmetry. Fig.
THE APPLICATION OF AN ATMOSPHERIC BOUNDARY LAYER TO EVALUATE TRUCK AERODYNAMICS IN CFD
 THE APPLICATION OF AN ATMOSPHERIC BOUNDARY LAYER TO EVALUATE TRUCK AERODYNAMICS IN CFD A SOLUTION FOR A REAL-WORLD ENGINEERING PROBLEM Ir. Niek van Dijk DAF Trucks N.V. CONTENTS Scope & Background Theory:
THE APPLICATION OF AN ATMOSPHERIC BOUNDARY LAYER TO EVALUATE TRUCK AERODYNAMICS IN CFD A SOLUTION FOR A REAL-WORLD ENGINEERING PROBLEM Ir. Niek van Dijk DAF Trucks N.V. CONTENTS Scope & Background Theory:
Pitch and Heave of KCS in Head Waves
 Pitch and Heave of KCS in Head Waves Objective: Predict RAOs, pitch and heave history, added resistance. Some data from Tokyo 2015 CFD Workshop (Tokyo 2015). The teams will prepare/modify grids from Carrica
Pitch and Heave of KCS in Head Waves Objective: Predict RAOs, pitch and heave history, added resistance. Some data from Tokyo 2015 CFD Workshop (Tokyo 2015). The teams will prepare/modify grids from Carrica
Determining Ship Resistance Using Computational Fluid Dynamics (CFD)
") Determining Ship Resistance Using Computational Fluid Dynamics (CFD) Yasser M. Ahmed a, c, O. B. Yaakob a, b,*, M. F. A. Rashid a, A. H. Elbatran a, d JTSE a Faculty of Mechanical Engineering, Universiti
Determining Ship Resistance Using Computational Fluid Dynamics (CFD) Yasser M. Ahmed a, c, O. B. Yaakob a, b,*, M. F. A. Rashid a, A. H. Elbatran a, d JTSE a Faculty of Mechanical Engineering, Universiti
Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
Pressure Drop Evaluation in a Pilot Plant Hydrocyclone
 Pressure Drop Evaluation in a Pilot Plant Hydrocyclone Fabio Kasper, M.Sc. Emilio Paladino, D.Sc. Marcus Reis, M.Sc. ESSS Carlos A. Capela Moraes, D.Sc. Dárley C. Melo, M.Sc. Petrobras Research Center
Pressure Drop Evaluation in a Pilot Plant Hydrocyclone Fabio Kasper, M.Sc. Emilio Paladino, D.Sc. Marcus Reis, M.Sc. ESSS Carlos A. Capela Moraes, D.Sc. Dárley C. Melo, M.Sc. Petrobras Research Center
CFD Simulation of Cavitation in an Internal Gear Pump
 CFD Simulation of Cavitation in an Internal Gear Pump Dr. Andreas Spille-Kohoff Jan Hesse CFX Berlin Software GmbH Berlin andreas.spille@cfx-berlin.de Contents Introduction Geometry and mesh Simulation
CFD Simulation of Cavitation in an Internal Gear Pump Dr. Andreas Spille-Kohoff Jan Hesse CFX Berlin Software GmbH Berlin andreas.spille@cfx-berlin.de Contents Introduction Geometry and mesh Simulation