arxiv: v1 [cs.cv] 19 Apr 2016
|
|
|
- Angel Grant
- 6 years ago
- Views:
Transcription





![This topic has received a great deal of attention in computer vision and cognitive science because of its wide range of applications such as content-aware image cropping [22] and resizing [3], video](/docs-images/80/80579737/images/1-5.jpg "summarization [24], object detection [20], and person re-identification [31].")
![Various papers such as DRFI [13], GMR [30], DSR [17], RBD [32], HDCT [15], HS [29] and GC [7] utilize low level features such as color, texture and location information to investigate characteristics](/docs-images/80/80579737/images/1-6.jpg "of salient regions including objectness, boundary convexity, spatial distribution, and global contrast.")
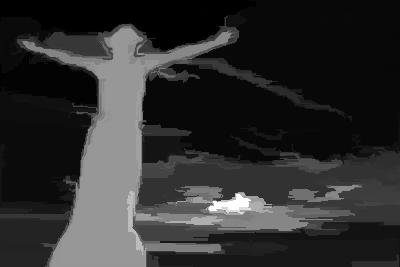
1 Deep Saliency with Encoded Low level Distance Map and High Level Features Gayoung Lee KAIST Yu-Wing Tai SenseTime Group Limited Junmo Kim KAIST arxiv: v1 [cs.cv] 19 Apr 2016 Abstract Recent advances in saliency detection have utilized deep learning to obtain high level features to detect salient regions in a scene. These advances have demonstrated superior results over previous works that utilize hand-crafted low level features for saliency detection. In this paper, we demonstrate that hand-crafted features can provide complementary information to enhance performance of saliency detection that utilizes only high level features. Our method utilizes both high level and low level features for saliency detection under a unified deep learning framework. The high level features are extracted using the VGG-net, and the low level features are compared with other parts of an image to form a low level distance map. The low level distance map is then encoded using a convolutional neural network(cnn) with multiple 1 1 convolutional and ReLU layers. We concatenate the encoded low level distance map and the high level features, and connect them to a fully connected neural network classifier to evaluate the saliency of a query region. Our experiments show that our method can further improve the performance of stateof-the-art deep learning-based saliency detection methods. 1. Introduction Saliency detection aims to detect distinctive regions in an image that draw human attention. This topic has received a great deal of attention in computer vision and cognitive science because of its wide range of applications such as content-aware image cropping [22] and resizing [3], video summarization [24], object detection [20], and person re-identification [31]. Various papers such as DRFI [13], GMR [30], DSR [17], RBD [32], HDCT [15], HS [29] and GC [7] utilize low level features such as color, texture and location information to investigate characteristics of salient regions including objectness, boundary convexity, spatial distribution, and global contrast. The recent success of deep learning in object recognition and classification [] brought to a revolution in computer vision. Inspired by the (a) (b) (c) (d) (e) (f) Figure 1: (a) Input images, (b) Ground truth masks, (c) Fuzzy saliency masks from VGG16 features (HF setting, described in Section 3.3), (d-f) Results of (d) MDF [16], (e) MCDL [21], and (f) our method. human visual system, deep learning builds hierarchical layers of visual representation to extract the high level features of an image. Using extracted high level features, several recent works [27, 16, 21] have demonstrated state-of-the-art performance in saliency detection that significantly outperform previous works that utilized only low level features. As discussed in [9], while high level features are good to evaluate objectness in an image, they are relatively weak in for determining precise localization. This is because multiple levels of convolutional and pooling layers blur the object boundaries, and high level features from the output of the last layer are too coarse spatially for the saliency detection task. This problem is illustrated in Figure 1(c). To generate a precise saliency mask, previous studies utilized various methods including object proposal [27] and superpixel classification [16, 21]. Yet, it was still very hard to differentiate salient regions from their adjacent non-salient regions because their feature distances were not directly encoded. In this paper, we introduce the encoded low level distance map (ELD-map), which directly encodes the feature distance between each pair of superpixels in an image. Our ELD-map encodes feature distance for various low level features including colors, color distributions, Gabor filter responses, and locations. Our ELD-map is unique in that it uses deep learning as an auto-encoder to encode these low level feature distances by multiple convolutional layers with 1 1 kernels. The encoded feature distance map has strong 1
2 H Query Region W Initial Feature Distance Map ELD-map Flattening W x1 1x1 1x1 Fully connected Fully connected 2 Salient? Non-Salient? Fully connected H Image Resized Image 224 VGG16 model VGG16 conv5_3 1x1 Reused for every query region in testing time Figure 2: Overall pipeline of our method. We compute the ELD-map from the initial feature distance map for each query region and concatenate the high level feature from the output of the conv5 3 layer of the VGG16 model. Flattening discriminative power to evaluate similarities between different parts of an image with precise boundaries among superpixels. We concatenate our ELD-map and the output of the last convolutional layer from the VGG-net (VGG16) [25] to form a new feature vector which is a composite of both high level and low level information. Using our new feature vector, we can precisely estimate saliency of superpixels. Without any post-processing, this method generates an accurate saliency map with precise boundaries. In summary, our paper offers the following contributions: We introduce the ELD-map which shows that low level features can play complementary roles to assist high level features with the precise detection of salient regions. Compared with previous works that utilized either high level or low level features, but not both, our work demonstrates consistent improvements across different benchmark datasets. Because high level features can be reused for different query regions in an image, our method runs fast. The testing time in the ECSSD dataset [29] takes only around 0.5 seconds per an image. 2. Related Works In this section, representative works in salient region detection are reviewed. We refer readers to [4] and [5] for a survey and a benchmark comparison of the state-of-the-art salient region detection algorithms. Recent trends in salient region detection utilize learningbased approaches, which were first introduced by Liu et al. [19]. Liu et al. were also the first group to released a benchmark dataset (MSRA10K) with ground truth evaluation. Following this work, several representative benchmarks with ground truth evaluation were released. These benchmarks include ECSSD [29], Judd [14], THUR15K [6], DUTOMRON [30], PASCAL-S [18], and FT [1]. They cover rich variety of images containing different scenes and subjects. In addition, each one exhibits different characteristics. For example, the ground truth of the MSRA10K dataset are binary mask images which were manually segmented by human, while the ground truth of the FT [1] dataset were determined by human fixation. Discriminative Regional Feature Integration(DRFI) [13], Robust Background Detection(RBD) [32], Dense and Sparse Reconstruction(DSR) [17], Markov Chain(MC) [12], High Dimensional Color Transform(HDCT) [15], and Hierarchical Saliency(HS) [29] are the top 6 models for salient region detection reported in the benchmark paper [5]. These algorithms consider various heuristic priors such as the global contrast prior [29] and the boundary prior [13] and often generate high-dimensional features to increase discriminative power [15, 13] to distinguish salient regions from non-salient regions. These methods are all based on hand-crafted low level features without deep learning. Deep learning has emerged in the field of saliency detection last year. Several methods that utilize deep learnings for saliency detection were simultaneously proposed. This includes Multiscale Deep Feature(MDF) [16], Multi- Context Deep Learning(MCDL) [21], and Local Estimation and Global Search(LEGS) [27]. They utilized high level features from the deep convolutional neural network (CNN) and demonstrated superior results over previous works that utilized only low level features. MDF and MCDL utilize superpixel algorithms, and query each region individually to assign saliency to superpixels. For each query region, MDF generates three input images that cover different scopes of an input image, and MCDL uses sliding windows with deep CNN to compute the deep features of the center superpixel. LEGS first generates an initial rough saliency mask from deep CNN and refines the saliency map using an object proposal algorithm.
3 height width r 1 r 2 r 3 r 4 c 11 c 12 c 13 c 14 r c c 11 c 12 c 13 5 r r height Q 7 r 8 21 c 22 c c c c21 c 22 c c24 r 9 r r c r c 32 c 33 c 34 c 31 c 32 c 33 c r 34 r r c 41 c r c r 17 c c N c 41 Figure 3: Visualization of the construction process for the initial low level feature distance map. Each grid cell, which represents uniformly divided area of an image, is described by the features of the superpixel that occupies the largest area of the grid cell. Using the features, we construct an N N K feature distance map. The computed features and distances are summarized in Table 1 and Table 2 Compared to the aforementioned methods, our work utilizes high level and low level features simultaneously. The high level features evaluate the objectness in an image with coarse spatial location and the low level features evaluate similarities between the different superpixels in an image. Our high level and low level features are combined and evaluated by a multi-level fully connected neural network classifier, that seamlessly considers both high level and low level features to assign saliency to query superpixels. Experiments demonstrate that our method significantly outperforms previous methods that utilize either low level features or high level features, but not both. 3. Algorithms The overall pipeline of our method is illustrated in Figure 2. First, the process for construction of the ELD-map is described. Then, we describe how the high level features were extracted and integrated with the ELD-map for salient region classification. At the end of this section, we report the results of our self evaluations to analyze the effects of the ELD-map and the high level features in our saliency detection framework Construction of the ELD-map Our algorithm utilizes a superpixel-based approach for saliency detection. To segment an image into superpixels, the SLIC[2] algorithm is used. The major benefits of using the SLIC algorithm for superpixel segmentation are that the segmented superpixels are roughly regular and that it provides control on the number of superpixels. After superpixel segmentation, the initial hand-crafted low level features of each superpixel are calculated, and the superpixel representation is converted into a regular grid representation as illustrated in Figure 3. To be more specific, we assign superpixels to grid cells according to their occupying area in each cell. This regular grid representation is efficient for CNN architecture because we can convert images with different resolutions and aspect ratios into a fixed size distance map without resizing and cropping. In our implementation, the size of the regular grid width N c 42 c 43 Features of a superpixel (f(r c )) Feature Index Average RGB value 1-3 Average LAB value 4-6 Average HSV value 7-9 Gabor filter response Maximum Gabor response 34 Center location RGB color histogram LAB color histogram HSV color histogram Table 1: The list of extracted features of a superpixel. Distance map features #f( ) Feature Index f(c ij ) f(r q ) χ 2 distance(f(c ij ), f(r q )) f(c ij ) Table 2: The list of feature distances used for computing the initial low level feature distance map. f(r q ) is the extracted features of a query superpixel, r q, and f(c ij ) is the extracted features of a grid cell c ij, where f(c ij ) := f(r c ). Details are described in Section 3.1. was set to. We index the superpixels as S = {r 1,..., r M }, and the grid cells of the regular grid as G = {c 11, c 12,..., c NN }, N =. We denote the computed feature descriptor of each superpixel region as f(r c ). The collected features for each superpixel are summarized in Table 1. Our hand-crafted features are all low level features related to colors (average colors in RGB, LAB, and HSV spaces, and their local color histograms), textures (Gabor filter responses [28] averaged over pixels in each region), and locations (center location of a superpixel). We normalize the pixel coordinates so that the range of coordinates was within [0, 1] and include the maximum over 24 values for the Gabor filter response in each region. Each grid cell descriptor is equal to the descriptor of the superpixel which occupies the largest area inside that grid cell, i.e., f(c ij ) := f(r c ), where r c = arg max rc #pixels(r c c ij ). Similar to MCDL[21] and MDF[16], we query the saliency score of each region individually. For each query region, we compute a low level feature distance map that modelled the feature distances between the queried superpixel f(r q ) and grid cells f(c ij ) in the regular grid. For the mean color value and Gabor response, we simply compute the differences within them where negative values are allowed, and use the Chi-square (χ 2 ) distance for color histograms between r c and r q. We attach the average colors of f(c ij ) at the end of the distance measurements as a reference point, and find that this improved the performance. Table 2 summarizes the computed feature distances of the initial feature distance map where the number of the initial features (K) is 54. After computing the distances, the size



![The effects of the encoding will be discussed in Section 3.3. 3.2. Integration with High Level Features We extract the high level features using the VGG16 model pretrained by the ImageNet Dataset [].](/docs-images/80/80579737/images/4-4.jpg "The VGG16 [25] won the ImageNet2014 CLS-LOC task. We used the VGG16 model distributed by Caffe Model Zoo [11] without finetuning.")

![To fit the features to our GPU memory, we attach an additional convolutional layer with a 1 1 kernel for feature selection and dimensionality reduction as in GoogleNet [26].](/docs-images/80/80579737/images/4-6.jpg "For each input image, we process it with the pre-trained deep CNN only once and reuse the extracted high level feature map for all queried regions.")


 (b) (c) (d) (e) (f) Figure 4: Visual comparisons of results in our selfevaluation experiments.")
 (e) using only encoded low level distance map (ELD) (f) using only high level features (HF). Details of each experiment are described in Table 3.")
4 of the initial feature distance map becomes 54. The initial feature distance map is then encoded to a compact but accurate feature distance map using the multiple 1 1 convolutional and ReLU layers, as illustrated in Figure 2. The multiple 1 1 convolutional and ReLU layers work as a fully connected layer across channels to find the best nonlinear combination of feature distances that better describe the similarities and dissimilarities between a query superpixel and the other regions of an image. Because the dimension of the initial map is reduced, we call this distance map as an encoded low level distance map (ELD-map). In our implementation, the size of the ELDmap was 3. In the self-evaluation experiment in Table 3, we find that encoding the low level feature distance map with the deep CNN with 1 1 kernel enhances the performance of our method. The effects of the encoding will be discussed in Section Integration with High Level Features We extract the high level features using the VGG16 model pretrained by the ImageNet Dataset []. The VGG16 [25] won the ImageNet2014 CLS-LOC task. We used the VGG16 model distributed by Caffe Model Zoo [11] without finetuning. We resize the input images to to fit to the fixed input size of the VGG16 model and extract a conv5 3 feature map, which is generated after passing the last convolutional layer. The extracted features has 512 channels and resolution. To fit the features to our GPU memory, we attach an additional convolutional layer with a 1 1 kernel for feature selection and dimensionality reduction as in GoogleNet [26]. For each input image, we process it with the pre-trained deep CNN only once and reuse the extracted high level feature map for all queried regions. Therefore, our computational cost is small even when we use a very deep and powerful model such as the VGG16 model. Although other parts of our algorithm, including generating the ELD-map and applying fully-connected layers, should be repeated each time, the cost from these parts is much smaller than running the VGG16 model. Before applying the fully-connected layers to classify the queried region, we concatenate the ELD-map and conv5 3 feature map after flattening each map. Afterwards, two fully-connected layers with 1024 nodes generate a saliency score for the queried region using the concatenated features. We use the cross entropy loss for softmax classifier to evaluate the outputs: L = 1 e zj 1 (y=j) log( ) (1) e z0 z1 + e j=0 where 0 and 1 denote non-salient and salient region labels respectively, and z 0 and z 1 are the score of each label of (a) (b) (c) (d) (e) (f) Figure 4: Visual comparisons of results in our selfevaluation experiments. (a) Input images, (b) Ground truth masks, (c-f) the results of our algorithm (c) using both ELDmap and high level features (ELD-HF) (d) using both nonencoded low level distance map and high level features (LD- HF) (e) using only encoded low level distance map (ELD) (f) using only high level features (HF). Details of each experiment are described in Table 3. (a) ECSSD (b) PASCAL-S Figure 5: Precision-Recall graphs of the controlled experiments described in Table 3 training data. Since the ELD-map features and the high level features are fixed in length, their spatial correlation can be learnt from training data automatically in the fully connected layers Analysis of the Effects of the Encoded Low level Distance map Although theoretically neural networks can model any complex function[10], practically they may suffer from limited training data and limited computational resources. For instance, overfitting and underfitting frequently occur because of a small dataset and the complexity of desired features. It is also common for CNN to generate feature maps with much lower resolution than original input images. By providing strongly relevant information, the encoded low level distance map(eld-map) complements the features from deep CNN and guides the classifier to learn properly. ELD-map has two main advantages: (1) it can easily generate the fine-grained dense saliency mask, and (2) it provides



 (b) (c) (d) (e) (f) (g) (h) (i) (j) Figure 7: Comparisons of the")
 Input images, the query superpixels are highlighted.")

 L-channel (LAB color space).")
 Differences of the maximum gabor filter responses.")
, and (g) H-channel histogram (HSV color space).")
 ECSSD (b) PASCAL-S Figure 6: Precision-Recall graphs of the controlled")












5 Setting Description ELD-HF LD-HF ELD HF Encoded Low level Distance map Not Not Non-encoded Low level Distance map Not Not Location Only High level features from VGG16 Not f-measure on ECSSD f-measure on PASCAL-S Table 3: The detail of settings of the controlled experiments. Using both ELD-map and high level features from VGG16 shows the best performance. (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) Figure 7: Comparisons of the discriminative power of different features and our ELD-map feature space. (a) Input images, the query superpixels are highlighted. (b)-(g) are the distance maps of the different features between the query superpixel and other superpixels in an image. (b)-(c) Distance maps of average color of (b) R-channel (RGB color space), and (c) L-channel (LAB color space). (d) Differences of the first Gabor filter responses. (e) Differences of the maximum gabor filter responses. (f)-(g) Chi-square distance maps of (f) L-channel histogram (LAB color space), and (g) H-channel histogram (HSV color space). (h)-(j) our Encoded Low level Distance map (ELD-map). (a) ECSSD (b) PASCAL-S Figure 6: Precision-Recall graphs of the controlled experiments to show the effect of the statistical features. additional low level feature distances, which can be hard to learn for CNN, such as Chi-square distance between histograms. We performed multiple controlled experiments to demonstrate the effects of the ELD-map in our algorithm. We conducted the experiments using four different settings: The ELD-HF setting uses both the ELD-map and the high level feature map from the VGG16 model. The LD-HF setting utilizes both the low level feature distances and the high level feature map, but does not encode the low level distances with the 1 1 convolutional network. The ELD setting uses only ELD-map without high level features from the VGG16 model. The HF setting uses the high level feature map from VGG16 model and the location distance between the query region and other regions to notify which region is queried. We ran all models until the training data loss converged. The results of the controlled experiments are shown in Figure 4. The model using only the high level feature map from the deep CNN detected the approximate location of the salient objects but was unable to capture detailed location because the high level feature maps had lower resolution than the resolution of the original input images. On the other hand, the model with only the low level features failed to distinguish the salient object in the first row. With both the low level feature distances and the high level feature map, the models could correctly capture salient objects and their exact boundaries. Also, we found that the ELD-map often helps to find salient objects that are difficult to detect using only CNN as shown in the second row. We speculate that the ELD-map can provide additional information which is hard to be accurately modeled by the convolutional layers. Some of the hand-crafted features of our method are statistical features, e.g. histogram, and we use χ2 distance to measure the distance between histograms that would be difficult to learn by CNN. To demonstrate the effects of the statistical features, we re-train our network with the histogram features removed from our network. The comparisons are
6 ASD PASCAL-S ECSSD DUT-OMRON THUR15K Ours MCDL MDF LEGS DRFI DSR GMR HDCT HS Table 4: The F-measure scores of salient region detection algorithms on five popular datasets. The best score is marked in bold. shown in Fig. 6. Clearly, the histogram features improve the performance of our work. Similarly, for features in other color space, e.g. LAB and HSV, it may require more layers to model such transformation, but we can easily adopt them from hand-crafted features. Table 3 summarizes the controlled experiments for the self-evaluation of our method. It also shows the quantitative comparisons in terms of f-measure on the ECSSD and the PASCAL-S datasets. The corresponding quantitative comparisons in terms of the Precision-Recall graphs are presented in Figure 5. The model utilizing both ELD-map and high level features exhibits the best performance. By comparing ELD-HF and LD-HF settings, we found that it is useful to apply 1 1 kernels among the low level features. Figure 7 shows the initial hand-crafted distance features and ELD-map. For the ELD-map, which is originally the size grid, we visualized each superpixel using the feature value of the closest grid cell according to the location of the center pixel. Each hand-crafted feature has its own weakness but it captures different aspects of similarities or dissimilarities between superpixels. Our 1 1 kernels work as fully-connected layers among low level feature distances and generate a powerful feature distance map by combining all of the original feature distances nonlinearly. This nonlinear mapping is data-driven which is directly learnt from training data automatically. We can see the strong discriminative power of feature distances in ELD-map. While the third channel (j) is related to the position of the query region, the other two channels (h-i) seem to indicate the differences of appearance such as color and texture. Therefore, the ELD-map helps to group regions that belong to the same object, because regions which have the similar color and texture have similar values in the two channels of the ELD-map regardless of their position. 4. Experiment and Discussion We evaluated the performance of our algorithm using various datasets. The MSRA10K [19] is a dataset with 10,000 images which includes the ASD dataset [1]. Most images in this dataset contains single object. The PASCAL- ASD PASCAL-S ECSSD DUT-OMRON THUR15K Ours MCDL MDF LEGS DRFI DSR GMR HDCT HS Table 5: The Mean Absolute Error(MAE) of salient region detection algorithms on five popular datasets. The best score is marked in bold. S [18] is generated from the PASCAL VOC dataset [8] and contains 850 natural images. The ECSSD [29] contains 1,000 images which have semantic meaning in their ground truth segmentation. It also contains images with complex structures. The DUT-OMRON [30] has 5,168 high quality images and the THUR15K [6] contains 6,2 images of specific classes. We trained our model using 9,000 images from the MSRA10K dataset after excluding the same images in ASD dataset. We did not use validation set and trained the model until its training data loss converges. From each image, we use about 30 salient superpixels and 70 non-salient superpixels; around 0.9 million input data are generated. The layers of VGG16 model are fixed by setting the learning rate equal to zero. For other layers, we initialize the weights by the xavier (caffe parameter), and we set the base learning rate equal to We use stochastic gradient descent method with momentum 0.9 and decrease running rate 90% when training loss does not decrease. Training our model takes 3 hours for 100,000 iterations with mini-batch size 128. Our results were compared with MCDL [21], MDF [16], LEGS [27], DRFI [13], DSR [17], GMR [30], HDCT [15], and HS [29], which are the state-of-the-art algorithms. DRFI, DSR, GMR, HDCT and HS use low level features and MCDL, MDF and LEGS utilize deep CNN for high level context. We obtained the result images from the project site of each algorithm or the benchmark evaluation [5]. The results which were not provided were generated from the authors source codes published in the web. The comparisons on Precision-Recall(PR) graph and Mean Absolute Error(MAE) graph are presented in Figure 8. Maximum F-measure scores and MAE values are also described in Table 4 and Table 5. We used the evaluation codes used in the benchmark paper [5]. The PR graph and f-measure score tend to be more informative than ROC curve because salient pixels are usually less than nonsalient [5]. Following the criteria by Achanta et. al. [1], we moved the threshold from 0 to 255 to generate binary masks(m). Using the ground truth(g), the precision and recall is calculated as follows:
 THUR15K Figure 8: From top to bottom,")



P recision")








 for fair comparisons as suggested by")
![[5]. The MAE evaluates the detection accuracy](/docs-images/80/80579737/images/7-18.jpg "(a) (b) (c) (d) (e) Figure 10: Failure cases of")
 Input images, (b) Ground truths, Results of")
7 (a) ASD (b) PASCAL-S (c) ECSSD (d) DUT-OMRON (e) THUR15K Figure 8: From top to bottom, Precision-Recall (PR) graph, F-measure score with different thresholds and Mean Absolute Error (MAE) of various algorithms on five popular datasets. T M G P recision =, M T M G Recall = G (2) We also reported the F-Measure score which is a balanced measurement between precision and recall as follows: Fβ = (1 + β 2 )P recision Recall β 2 P recision + Recall (3) where β 2 is typically set to 0.3. We visualized f-measure score for the different thresholds and reported the maximum f-measure score which well describes the overall detection performance [5]. In our algorithm, making binary masks using the high threshold around 240 generated good f-measure score. The overlapping-based evaluations give higher score to methods which assign high saliency score to salient pixel correctly. However, the evaluation on non-salient regions can be unfair especially for the methods which successfully detect non-salient regions, but missed the detection of salient regions [5]. Therefore, we also calculated the mean absolute error(mae) for fair comparisons as suggested by [5]. The MAE evaluates the detection accuracy (a) (b) (c) (d) (e) Figure 10: Failure cases of our algorithm. (a) Input images, (b) Ground truths, Results of (c) our method, (d) MCDL [21], (e) MDF [16]. as follow: M AE = W X H X 1 S(x, y) G(x, y) W H x=1 y=1 (4) where W and H are width and height of an image, S is the estimated saliency map and G is the ground truth binary mask.
 MDF (f) LEGS (g) DRFI")


 original image, (b) ground")
![truth, (c) Ours (d) MCDL [21] (e)](/docs-images/80/80579737/images/8-5.jpg "MDF [16] (f) LEGS [27] (g) DRFI")
![[13], (h) DSR [17], (i) GMR [30],](/docs-images/80/80579737/images/8-6.jpg "(j) HDCT [15] (k) HS [29].")











,")

.")




























8 (a) Inputs (b) GT (c) Ours (d) MCDL (e) MDF (f) LEGS (g) DRFI (h) DSR (i) GMR (j) HDCT (k) HS Figure 9: Visual comparisons of our results and the state-of-the-art methods on difficult scenes. (a) original image, (b) ground truth, (c) Ours (d) MCDL [21] (e) MDF [16] (f) LEGS [27] (g) DRFI [13], (h) DSR [17], (i) GMR [30], (j) HDCT [15] (k) HS [29]. From the top to the bottom, row 1-2 are the images with a low-contrast salient object, row 3-4 are with complicated background, row 5-6 are with multiple salient objects and row 7 is with a salient object touching the image boundaries. In Figure 8, the PR-graph indicates our algorithm achieves the better performance than the previous works including MDF and MCDL which also utilize CNN models. Our algorithm shows the lowest MAE and the highest maximum F-measure score on most of the datasets. Visual comparisons of various methods are shown in Figure 9. We visualize the results from various difficult cases including low-contrast objects (row 1-3), complicate backgrounds (row 4-6), small salient objects (row 7-8), multiple salient objects(row 9-10) and touching boundary examples (row 11-12). Our algorithm shows especially good performance on images with low-contrast salient objects and complicated backgrounds, and also works well on other difficult scenes. In Figure 10, we reported some failure cases. The first and the second results contain correct salient objects but also highlight non-salient regions. The third and fourth examples have the extremely difficult scenes with a small, low-contrast and boundary touching the salient object. Because these kinds of data are not provided much by the training data, MSRA10K, we may further improve the performance with richer training data. For these difficult scenes, MCDL [21] and MDF [16] also fail to find the salient objects precisely. The running time of our algorithm was measured from the ECSSD dataset, where tested images were of size We used a server machine with intel i7 CPU, 8GB RAM and GTX Titan-Black for testing. Our model, devel- oped by C++ and based on Caffe [11] library, took around 0.5 seconds per image. The training of our deep CNN took around 3 hours under the same environment. The short training time and testing time is also an advantage of our method. This is due to the sharing of our high level features which only need to be computed once for a whole image. 5. Conclusion In this paper, we have introduced a new method to integrate the low-level and the high-level features for saliency detection. The Encoded Low-level Distance map (ELDmap) has stronger discriminative power than the original low-level feature distances to measure similarities or dissimilarities among superpixels. When concatenated with the high-level features from the deep CNN model (VGG16), our method shows the state-of-the-art performance in terms of both visual qualities and quantitative comparisons. As a future work, we are planning to explore more various CNN architectures to further improve the performance of our work. Acknowledgement This work was partially supported by HRHRP(High Risk High Return Project of KAIST) and the MOTIE(The Ministry of Trade, industry & Energy), Korea, under the Technology Innovation Program supervised by KEIT(Korea
9 Evaluation Institute of Industrial Technology), , Development of robot task intelligence technology. Futhermore, this research was also supported by the National Research Foundation of Korea (NRF) under Grant NRF- 2014R1A2A2A References [1] R. Achanta, S. Hemami, F. Estrada, and S. Susstrunk. Frequency-tuned salient region detection. In Proc. of Computer Vision and Pattern Recognition (CVPR), , 6 [2] R. Achanta, A. Shaji, K. Smith, A. Lucchi, P. Fua, and S. Susstrunk. Slic superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI), 34(11): , [3] S. Avidan and A. Shamir. Seam carving for content-aware image resizing. 26(3):10, [4] A. Borji, M.-M. Cheng, H. Jiang, and J. Li. Salient object detection: A survey. ArXiv e-prints, [5] A. Borji, M.-M. Cheng, H. Jiang, and J. Li. Salient object detection: A benchmark. ArXiv e-prints, , 6, 7 [6] M.-M. Cheng, N. Mitra, X. Huang, and S.-M. Hu. Salientshape: group saliency in image collections. The Visual Computer, 30(4): , , 6 [7] M.-M. Cheng, N. J. Mitra, X. Huang, P. H. S. Torr, and S.- M. Hu. Global contrast based salient region detection. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI), 37(3): , [8] M. Everingham, S. A. Eslami, L. Van Gool, C. K. Williams, J. Winn, and A. Zisserman. The pascal visual object classes challenge: A retrospective. International Journal of Computer Vision, 111(1):98 136, [9] B. Hariharan, P. Arbeláez, R. Girshick, and J. Malik. Hypercolumns for object segmentation and fine-grained localization. In Proc. of Computer Vision and Pattern Recognition (CVPR), [10] K. Hornik, M. Stinchcombe, and H. White. Multilayer feedforward networks are universal approximators. Neural networks, 2(5): , [11] Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R. Girshick, S. Guadarrama, and T. Darrell. Caffe: Convolutional architecture for fast feature embedding , 8 [12] B. Jiang, L. Zhang, H. Lu, C. Yang, and M. Yang. Saliency detection via dense and sparse reconstruction. In Proc. of Int l Conf. on Computer Vision (ICCV), [13] H. Jiang, J. Wang, Z. Yuan, N. Z. Y. Wu, and S. Li. Salient object detection: A discriminative regional feature integration approach. In Proc. of Computer Vision and Pattern Recognition (CVPR), , 2, 6, 8 [14] T. Judd, K. Ehinger, F. Durand, and A. Torralba. Learning to predict where humans look. In Proc. of Int l Conf. on Computer Vision (ICCV), [15] J. Kim, D. Han, Y. Tai, and J. Kim. Salient region detection via high-dimensional color transform. In Proc. of Computer Vision and Pattern Recognition (CVPR), , 2, 6, 8 [16] G. Li and Y. Yu. Visual saliency based on multiscale deep features. In Proc. of Computer Vision and Pattern Recognition (CVPR), , 2, 3, 6, 7, 8 [17] X. Li, H. Lu, L. Zhang, X. Ruan, and M. Yang. Saliency detection via dense and sparse reconstruction. In Proc. of Int l Conf. on Computer Vision (ICCV), , 2, 6, 8 [18] Y. Li, X. Hou, C. Koch, J. M. Rehg, and A. L. Yuille. The secrets of salient object segmentation. In Proc. of Computer Vision and Pattern Recognition (CVPR), pages IEEE, , 6 [19] T. Liu, J. Sun, N.-N. Zheng, X. Tang, and H.-Y. Shum. Learning to detect a salient object. In Proc. of Computer Vision and Pattern Recognition (CVPR), , 6 [20] P. Luo, Y. Tian, X. Wang, and X. Tang. Switchable deep network for pedestrian detection. In Proc. of Computer Vision and Pattern Recognition (CVPR), pages IEEE, [21] W. O. R. Zhao, H.Li, and X.Wang. Saliency detection by multi-context deep learning. In Proc. of Computer Vision and Pattern Recognition (CVPR), , 2, 3, 6, 7, 8 [22] C. Rother, L. Bordeaux, Y. Hamadi, and A. Blake. Autocollage. 25(3): , [] O. Russakovsky, J. Deng, H. Su, J. Krause, S. Satheesh, S. Ma, Z. Huang, A. Karpathy, A. Khosla, M. Bernstein, A. C. Berg, and L. Fei-Fei. ImageNet Large Scale Visual Recognition Challenge. International Journal of Computer Vision (IJCV), pages 1 42, April , 4 [24] D. Simakov, Y. Caspi, E. Shechtman, and M. Irani. Summarizing visual data using bidirectional similarity. In Proc. of Computer Vision and Pattern Recognition (CVPR), pages 1 8. IEEE, [25] K. Simonyan and A. Zisserman. Very deep convolutional networks for large-scale image recognition. CoRR, abs/ , , 4 [26] C. Szegedy, W. Liu, Y. Jia, P. Sermanet, S. Reed, D. Anguelov, D. Erhan, V. Vanhoucke, and A. Rabinovich. Going deeper with convolutions. In Proc. of Computer Vision and Pattern Recognition (CVPR), [27] L. Wang, H. Lu, X. Ruan, and M.-H. Yang. Deep networks for saliency detection via local estimation and global search. In Proc. of Computer Vision and Pattern Recognition (CVPR), pages , , 2, 6, 8 [28] T. P. Weldon, W. E. Higgins, and D. F. Dunn. Efficient gabor filter design for texture segmentation. Pattern Recognition, 29(12): , [29] Q. Yan, L. Xu, J. Shi, and J. Jia. Hierarchical saliency detection. In Proc. of Computer Vision and Pattern Recognition (CVPR), , 2, 6, 8 [30] C. Yang, L. Zhang, H. Lu, X. Ruan, and M. Yang. Saliency detection via graph-based manifold ranking. In Proc. of Computer Vision and Pattern Recognition (CVPR), , 2, 6, 8 [31] R. Zhao, W. Ouyang, and X. Wang. Unsupervised salience learning for person re-identification. In Proc. of Computer Vision and Pattern Recognition (CVPR), pages IEEE, [32] W. Zhu, S. Liang, Y. Wei, and J. Sun. Saliency optimization from robust background detection. In Proc. of Computer Vision and Pattern Recognition (CVPR), , 2
Supplementary Materials for Salient Object Detection: A
 Supplementary Materials for Salient Object Detection: A Discriminative Regional Feature Integration Approach Huaizu Jiang, Zejian Yuan, Ming-Ming Cheng, Yihong Gong Nanning Zheng, and Jingdong Wang Abstract
Supplementary Materials for Salient Object Detection: A Discriminative Regional Feature Integration Approach Huaizu Jiang, Zejian Yuan, Ming-Ming Cheng, Yihong Gong Nanning Zheng, and Jingdong Wang Abstract
Supplementary Material: Unconstrained Salient Object Detection via Proposal Subset Optimization
 Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
arxiv: v1 [cs.cv] 10 May 2017
![arxiv: v1 [cs.cv] 10 May 2017](/thumbs/90/104337818.jpg "arxiv: v1 [cs.cv] 10 May 2017") Learning RGB-D Salient Object Detection using background enclosure, depth contrast, and top-down features arxiv:1705.03607v1 [cs.cv] 10 May 2017 Riku Shigematsu David Feng Australian National University
Learning RGB-D Salient Object Detection using background enclosure, depth contrast, and top-down features arxiv:1705.03607v1 [cs.cv] 10 May 2017 Riku Shigematsu David Feng Australian National University
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Supplementary Material for submission 2147: Traditional Saliency Reloaded: A Good Old Model in New Shape
 Supplementary Material for submission 247: Traditional Saliency Reloaded: A Good Old Model in New Shape Simone Frintrop, Thomas Werner, and Germán M. García Institute of Computer Science III Rheinische
Supplementary Material for submission 247: Traditional Saliency Reloaded: A Good Old Model in New Shape Simone Frintrop, Thomas Werner, and Germán M. García Institute of Computer Science III Rheinische
A Bi-directional Message Passing Model for Salient Object Detection
 A Bi-directional Message Passing Model for Salient Object Detection Lu Zhang, Ju Dai, Huchuan Lu, You He 2, ang Wang 3 Dalian University of Technology, China 2 Naval Aviation University, China 3 Alibaba
A Bi-directional Message Passing Model for Salient Object Detection Lu Zhang, Ju Dai, Huchuan Lu, You He 2, ang Wang 3 Dalian University of Technology, China 2 Naval Aviation University, China 3 Alibaba
Learning RGB-D Salient Object Detection using background enclosure, depth contrast, and top-down features
 Learning RGB-D Salient Object Detection using background enclosure, depth contrast, and top-down features Riku Shigematsu David Feng Australian National University riku.research@gmail.com david.feng@data61.csiro.au
Learning RGB-D Salient Object Detection using background enclosure, depth contrast, and top-down features Riku Shigematsu David Feng Australian National University riku.research@gmail.com david.feng@data61.csiro.au
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
arxiv: v1 [cs.cv] 5 Oct 2015
![arxiv: v1 [cs.cv] 5 Oct 2015](/thumbs/71/66021937.jpg "arxiv: v1 [cs.cv] 5 Oct 2015") Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
Unsupervised Saliency Estimation based on Robust Hypotheses
 Utah State University DigitalCommons@USU Computer Science Faculty and Staff Publications Computer Science 3-2016 Unsupervised Saliency Estimation based on Robust Hypotheses Fei Xu Utah State University,
Utah State University DigitalCommons@USU Computer Science Faculty and Staff Publications Computer Science 3-2016 Unsupervised Saliency Estimation based on Robust Hypotheses Fei Xu Utah State University,
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
arxiv: v2 [cs.cv] 31 Mar 2015
![arxiv: v2 [cs.cv] 31 Mar 2015](/thumbs/81/83268630.jpg "arxiv: v2 [cs.cv] 31 Mar 2015") Visual Saliency Based on Multiscale Deep Features Guanbin Li Yizhou Yu Department of Computer Science, The University of Hong Kong https://sites.google.com/site/ligb86/mdfsaliency/ arxiv:1503.08663v2 [cs.cv]
Visual Saliency Based on Multiscale Deep Features Guanbin Li Yizhou Yu Department of Computer Science, The University of Hong Kong https://sites.google.com/site/ligb86/mdfsaliency/ arxiv:1503.08663v2 [cs.cv]
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
arxiv: v1 [cs.cv] 8 Jan 2019
![arxiv: v1 [cs.cv] 8 Jan 2019](/thumbs/93/112787185.jpg "arxiv: v1 [cs.cv] 8 Jan 2019") Richer and Deeper Supervision Network for Salient Object Detection Sen Jia Ryerson University sen.jia@ryerson.ca Neil D. B. Bruce Ryerson University, Vector Institute bruce@ryerson.ca arxiv:1902425v1 [cs.cv]
Richer and Deeper Supervision Network for Salient Object Detection Sen Jia Ryerson University sen.jia@ryerson.ca Neil D. B. Bruce Ryerson University, Vector Institute bruce@ryerson.ca arxiv:1902425v1 [cs.cv]
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
In Defense of Fully Connected Layers in Visual Representation Transfer
 In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Adaptive Fusion for RGB-D Salient Object Detection
 Date of publication xxxx 00, 0000, date of current version xxxx 00, 0000. Digital Object Identifier 0.09/ACCESS.207.DOI arxiv:90.069v [cs.cv] 5 Jan 209 Adaptive Fusion for RGB-D Salient Object Detection
Date of publication xxxx 00, 0000, date of current version xxxx 00, 0000. Digital Object Identifier 0.09/ACCESS.207.DOI arxiv:90.069v [cs.cv] 5 Jan 209 Adaptive Fusion for RGB-D Salient Object Detection
Detect Globally, Refine Locally: A Novel Approach to Saliency Detection
 Detect Globally, Refine Locally: A Novel Approach to Saliency Detection Tiantian Wang, Lihe Zhang, Shuo Wang, Huchuan Lu, Gang Yang 2, Xiang Ruan 3, Ali Borji 4 Dalian University of Technology, 2 Northeastern
Detect Globally, Refine Locally: A Novel Approach to Saliency Detection Tiantian Wang, Lihe Zhang, Shuo Wang, Huchuan Lu, Gang Yang 2, Xiang Ruan 3, Ali Borji 4 Dalian University of Technology, 2 Northeastern
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
arxiv: v1 [cs.cv] 26 Jun 2017
![arxiv: v1 [cs.cv] 26 Jun 2017](/thumbs/80/82184026.jpg "arxiv: v1 [cs.cv] 26 Jun 2017") Detecting Small Signs from Large Images arxiv:1706.08574v1 [cs.cv] 26 Jun 2017 Zibo Meng, Xiaochuan Fan, Xin Chen, Min Chen and Yan Tong Computer Science and Engineering University of South Carolina, Columbia,
Detecting Small Signs from Large Images arxiv:1706.08574v1 [cs.cv] 26 Jun 2017 Zibo Meng, Xiaochuan Fan, Xin Chen, Min Chen and Yan Tong Computer Science and Engineering University of South Carolina, Columbia,
Video Gesture Recognition with RGB-D-S Data Based on 3D Convolutional Networks
 Video Gesture Recognition with RGB-D-S Data Based on 3D Convolutional Networks August 16, 2016 1 Team details Team name FLiXT Team leader name Yunan Li Team leader address, phone number and email address:
Video Gesture Recognition with RGB-D-S Data Based on 3D Convolutional Networks August 16, 2016 1 Team details Team name FLiXT Team leader name Yunan Li Team leader address, phone number and email address:
RSRN: Rich Side-output Residual Network for Medial Axis Detection
 RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015
 CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
Machine Learning. Deep Learning. Eric Xing (and Pengtao Xie) , Fall Lecture 8, October 6, Eric CMU,
 , Fall Lecture 8, October 6, Eric CMU,") Machine Learning 10-701, Fall 2015 Deep Learning Eric Xing (and Pengtao Xie) Lecture 8, October 6, 2015 Eric Xing @ CMU, 2015 1 A perennial challenge in computer vision: feature engineering SIFT Spin image
Machine Learning 10-701, Fall 2015 Deep Learning Eric Xing (and Pengtao Xie) Lecture 8, October 6, 2015 Eric Xing @ CMU, 2015 1 A perennial challenge in computer vision: feature engineering SIFT Spin image
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
arxiv: v1 [cs.cv] 24 May 2016
![arxiv: v1 [cs.cv] 24 May 2016](/thumbs/80/80473828.jpg "arxiv: v1 [cs.cv] 24 May 2016") Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Multi-Glance Attention Models For Image Classification
 Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
arxiv: v4 [cs.cv] 6 Jul 2016
![arxiv: v4 [cs.cv] 6 Jul 2016](/thumbs/93/112985717.jpg "arxiv: v4 [cs.cv] 6 Jul 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Supplementary material for Analyzing Filters Toward Efficient ConvNet
 Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
arxiv: v1 [cs.cv] 1 Sep 2017
![arxiv: v1 [cs.cv] 1 Sep 2017](/thumbs/73/68939051.jpg "arxiv: v1 [cs.cv] 1 Sep 2017") Single Shot Text Detector with Regional Attention Pan He1, Weilin Huang2, 3, Tong He3, Qile Zhu1, Yu Qiao3, and Xiaolin Li1 arxiv:1709.00138v1 [cs.cv] 1 Sep 2017 1 National Science Foundation Center for
Single Shot Text Detector with Regional Attention Pan He1, Weilin Huang2, 3, Tong He3, Qile Zhu1, Yu Qiao3, and Xiaolin Li1 arxiv:1709.00138v1 [cs.cv] 1 Sep 2017 1 National Science Foundation Center for
Convolutional Neural Network Layer Reordering for Acceleration
 R1-15 SASIMI 2016 Proceedings Convolutional Neural Network Layer Reordering for Acceleration Vijay Daultani Subhajit Chaudhury Kazuhisa Ishizaka System Platform Labs Value Co-creation Center System Platform
R1-15 SASIMI 2016 Proceedings Convolutional Neural Network Layer Reordering for Acceleration Vijay Daultani Subhajit Chaudhury Kazuhisa Ishizaka System Platform Labs Value Co-creation Center System Platform
AS an important and challenging problem in computer
 IEEE TRANSACTIONS ON IMAGE PROCESSING DeepSaliency: Multi-Task Deep Neural Network Model for Salient Object Detection Xi Li, Liming Zhao, Lina Wei, MingHsuan Yang, Fei Wu, Yueting Zhuang, Haibin Ling,
IEEE TRANSACTIONS ON IMAGE PROCESSING DeepSaliency: Multi-Task Deep Neural Network Model for Salient Object Detection Xi Li, Liming Zhao, Lina Wei, MingHsuan Yang, Fei Wu, Yueting Zhuang, Haibin Ling,
Face Recognition A Deep Learning Approach
 Face Recognition A Deep Learning Approach Lihi Shiloh Tal Perl Deep Learning Seminar 2 Outline What about Cat recognition? Classical face recognition Modern face recognition DeepFace FaceNet Comparison
Face Recognition A Deep Learning Approach Lihi Shiloh Tal Perl Deep Learning Seminar 2 Outline What about Cat recognition? Classical face recognition Modern face recognition DeepFace FaceNet Comparison
SALIENT OBJECT DETECTION FOR RGB-D IMAGE VIA SALIENCY EVOLUTION.
 SALIENT OBJECT DETECTION FOR RGB-D IMAGE VIA SALIENCY EVOLUTION Jingfan Guo,2, Tongwei Ren,2,, Jia Bei,2 State Key Laboratory for Novel Software Technology, Nanjing University, China 2 Software Institute,
SALIENT OBJECT DETECTION FOR RGB-D IMAGE VIA SALIENCY EVOLUTION Jingfan Guo,2, Tongwei Ren,2,, Jia Bei,2 State Key Laboratory for Novel Software Technology, Nanjing University, China 2 Software Institute,
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
Rich feature hierarchies for accurate object detection and semantic segmentation
 Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Rich feature hierarchies for accurate object detection and semantic segmentation BY; ROSS GIRSHICK, JEFF DONAHUE, TREVOR DARRELL AND JITENDRA MALIK PRESENTER; MUHAMMAD OSAMA Object detection vs. classification
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Feature-Fused SSD: Fast Detection for Small Objects
 Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Pixel Offset Regression (POR) for Single-shot Instance Segmentation
 for Single-shot Instance Segmentation") Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Salient Region Detection via High-Dimensional Color Transform
 Salient Region Detection via High-Dimensional Color Transform Jiwhan Kim Dongyoon Han Yu-Wing Tai Junmo Kim Department of Electrical Engineering Korea Advanced Institute of Science and Technology (KAIST)
Salient Region Detection via High-Dimensional Color Transform Jiwhan Kim Dongyoon Han Yu-Wing Tai Junmo Kim Department of Electrical Engineering Korea Advanced Institute of Science and Technology (KAIST)
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
A Novel Representation and Pipeline for Object Detection
 A Novel Representation and Pipeline for Object Detection Vishakh Hegde Stanford University vishakh@stanford.edu Manik Dhar Stanford University dmanik@stanford.edu Abstract Object detection is an important
A Novel Representation and Pipeline for Object Detection Vishakh Hegde Stanford University vishakh@stanford.edu Manik Dhar Stanford University dmanik@stanford.edu Abstract Object detection is an important
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Deep Networks for Saliency Detection via Local Estimation and Global Search
 Deep Networks for Saliency Detection via Local Estimation and Global Search Lijun Wang, Huchuan Lu, Xiang Ruan and Ming-Hsuan Yang Dalian University of Technology MRN Corporation University of California
Deep Networks for Saliency Detection via Local Estimation and Global Search Lijun Wang, Huchuan Lu, Xiang Ruan and Ming-Hsuan Yang Dalian University of Technology MRN Corporation University of California
Automatic Detection of Multiple Organs Using Convolutional Neural Networks
 Automatic Detection of Multiple Organs Using Convolutional Neural Networks Elizabeth Cole University of Massachusetts Amherst Amherst, MA ekcole@umass.edu Sarfaraz Hussein University of Central Florida
Automatic Detection of Multiple Organs Using Convolutional Neural Networks Elizabeth Cole University of Massachusetts Amherst Amherst, MA ekcole@umass.edu Sarfaraz Hussein University of Central Florida
Visual Inspection of Storm-Water Pipe Systems using Deep Convolutional Neural Networks
 Visual Inspection of Storm-Water Pipe Systems using Deep Convolutional Neural Networks Ruwan Tennakoon, Reza Hoseinnezhad, Huu Tran and Alireza Bab-Hadiashar School of Engineering, RMIT University, Melbourne,
Visual Inspection of Storm-Water Pipe Systems using Deep Convolutional Neural Networks Ruwan Tennakoon, Reza Hoseinnezhad, Huu Tran and Alireza Bab-Hadiashar School of Engineering, RMIT University, Melbourne,
Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset
 Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset Suyash Shetty Manipal Institute of Technology suyash.shashikant@learner.manipal.edu Abstract In
Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset Suyash Shetty Manipal Institute of Technology suyash.shashikant@learner.manipal.edu Abstract In
Deep Contrast Learning for Salient Object Detection
 Deep Contrast Learning for Salient Object Detection Guanbin Li Yizhou Yu Department of Computer Science, The University of Hong Kong {gbli, yzyu}@cs.hku.hk Abstract Salient object detection has recently
Deep Contrast Learning for Salient Object Detection Guanbin Li Yizhou Yu Department of Computer Science, The University of Hong Kong {gbli, yzyu}@cs.hku.hk Abstract Salient object detection has recently
Two-Stream Recurrent Convolutional Neural Networks for Video Saliency Estimation
 Two-Stream Recurrent Convolutional Neural Networks for Video Saliency Estimation Xiao Wei 1,2, Li Song 1,2, Rong Xie 1,2, Wenjun Zhang 1,2 1 Institute of Image Communication and Network Engineering, Shanghai
Two-Stream Recurrent Convolutional Neural Networks for Video Saliency Estimation Xiao Wei 1,2, Li Song 1,2, Rong Xie 1,2, Wenjun Zhang 1,2 1 Institute of Image Communication and Network Engineering, Shanghai
Tunnel Effect in CNNs: Image Reconstruction From Max-Switch Locations
 Downloaded from orbit.dtu.dk on: Nov 01, 2018 Tunnel Effect in CNNs: Image Reconstruction From Max-Switch Locations de La Roche Saint Andre, Matthieu ; Rieger, Laura ; Hannemose, Morten; Kim, Junmo Published
Downloaded from orbit.dtu.dk on: Nov 01, 2018 Tunnel Effect in CNNs: Image Reconstruction From Max-Switch Locations de La Roche Saint Andre, Matthieu ; Rieger, Laura ; Hannemose, Morten; Kim, Junmo Published
Deconvolutions in Convolutional Neural Networks
 Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Co-Saliency Detection within a Single Image
 Co-Saliency Detection within a Single Image Hongkai Yu2, Kang Zheng2, Jianwu Fang3, 4, Hao Guo2, Wei Feng, Song Wang, 2, 2 School of Computer Science and Technology, Tianjin University, Tianjin, China
Co-Saliency Detection within a Single Image Hongkai Yu2, Kang Zheng2, Jianwu Fang3, 4, Hao Guo2, Wei Feng, Song Wang, 2, 2 School of Computer Science and Technology, Tianjin University, Tianjin, China
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
FaceNet. Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana
 FaceNet Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana Introduction FaceNet learns a mapping from face images to a compact Euclidean Space
FaceNet Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana Introduction FaceNet learns a mapping from face images to a compact Euclidean Space
Robust Face Recognition Based on Convolutional Neural Network
 2017 2nd International Conference on Manufacturing Science and Information Engineering (ICMSIE 2017) ISBN: 978-1-60595-516-2 Robust Face Recognition Based on Convolutional Neural Network Ying Xu, Hui Ma,
2017 2nd International Conference on Manufacturing Science and Information Engineering (ICMSIE 2017) ISBN: 978-1-60595-516-2 Robust Face Recognition Based on Convolutional Neural Network Ying Xu, Hui Ma,
A Stagewise Refinement Model for Detecting Salient Objects in Images
 A Stagewise Refinement Model for Detecting Salient Objects in Images Tiantian Wang 1, Ali Borji 2, Lihe Zhang 1, Pingping Zhang 1, Huchuan Lu 1 1 Dalian University of Technology, China 2 University of
A Stagewise Refinement Model for Detecting Salient Objects in Images Tiantian Wang 1, Ali Borji 2, Lihe Zhang 1, Pingping Zhang 1, Huchuan Lu 1 1 Dalian University of Technology, China 2 University of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network
 Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL
 PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL Yingxin Lou 1, Guangtao Fu 2, Zhuqing Jiang 1, Aidong Men 1, and Yun Zhou 2 1 Beijing University of Posts and Telecommunications, Beijing,
PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL Yingxin Lou 1, Guangtao Fu 2, Zhuqing Jiang 1, Aidong Men 1, and Yun Zhou 2 1 Beijing University of Posts and Telecommunications, Beijing,
LARGE-SCALE PERSON RE-IDENTIFICATION AS RETRIEVAL
 LARGE-SCALE PERSON RE-IDENTIFICATION AS RETRIEVAL Hantao Yao 1,2, Shiliang Zhang 3, Dongming Zhang 1, Yongdong Zhang 1,2, Jintao Li 1, Yu Wang 4, Qi Tian 5 1 Key Lab of Intelligent Information Processing
LARGE-SCALE PERSON RE-IDENTIFICATION AS RETRIEVAL Hantao Yao 1,2, Shiliang Zhang 3, Dongming Zhang 1, Yongdong Zhang 1,2, Jintao Li 1, Yu Wang 4, Qi Tian 5 1 Key Lab of Intelligent Information Processing
Image Resizing Based on Gradient Vector Flow Analysis
 Image Resizing Based on Gradient Vector Flow Analysis Sebastiano Battiato battiato@dmi.unict.it Giovanni Puglisi puglisi@dmi.unict.it Giovanni Maria Farinella gfarinellao@dmi.unict.it Daniele Ravì rav@dmi.unict.it
Image Resizing Based on Gradient Vector Flow Analysis Sebastiano Battiato battiato@dmi.unict.it Giovanni Puglisi puglisi@dmi.unict.it Giovanni Maria Farinella gfarinellao@dmi.unict.it Daniele Ravì rav@dmi.unict.it
VIsual saliency attempts to determine the amount of. Visual Saliency Detection Based on Multiscale Deep CNN Features
 1 Visual Saliency Detection Based on Multiscale Deep CNN Features Guanbin Li and Yizhou Yu arxiv:1609.02077v1 [cs.cv] 7 Sep 2016 Abstract Visual saliency is a fundamental problem in both cognitive and
1 Visual Saliency Detection Based on Multiscale Deep CNN Features Guanbin Li and Yizhou Yu arxiv:1609.02077v1 [cs.cv] 7 Sep 2016 Abstract Visual saliency is a fundamental problem in both cognitive and
IDENTIFYING PHOTOREALISTIC COMPUTER GRAPHICS USING CONVOLUTIONAL NEURAL NETWORKS
 IDENTIFYING PHOTOREALISTIC COMPUTER GRAPHICS USING CONVOLUTIONAL NEURAL NETWORKS In-Jae Yu, Do-Guk Kim, Jin-Seok Park, Jong-Uk Hou, Sunghee Choi, and Heung-Kyu Lee Korea Advanced Institute of Science and
IDENTIFYING PHOTOREALISTIC COMPUTER GRAPHICS USING CONVOLUTIONAL NEURAL NETWORKS In-Jae Yu, Do-Guk Kim, Jin-Seok Park, Jong-Uk Hou, Sunghee Choi, and Heung-Kyu Lee Korea Advanced Institute of Science and
arxiv: v1 [cs.cv] 26 May 2017 Received: date / Accepted: date
![arxiv: v1 [cs.cv] 26 May 2017 Received: date / Accepted: date](/thumbs/81/84259199.jpg "arxiv: v1 [cs.cv] 26 May 2017 Received: date / Accepted: date") Noname manuscript No. will be inserted by the editor Hierarchical Cellular Automata for Visual Saliency Yao Qin* Mengyang Feng* Huchuan Lu Garrison W. Cottrell arxiv:75.9425v [cs.cv] 26 May 27 Received:
Noname manuscript No. will be inserted by the editor Hierarchical Cellular Automata for Visual Saliency Yao Qin* Mengyang Feng* Huchuan Lu Garrison W. Cottrell arxiv:75.9425v [cs.cv] 26 May 27 Received:
Instance-Level Salient Object Segmentation
 Instance-Level Salient Object Segmentation Guanbin Li 1,2 Yuan Xie 1 Liang Lin 1 Yizhou Yu 2 1 Sun Yat-sen University 2 The University of Hong Kong Abstract Image saliency detection has recently witnessed
Instance-Level Salient Object Segmentation Guanbin Li 1,2 Yuan Xie 1 Liang Lin 1 Yizhou Yu 2 1 Sun Yat-sen University 2 The University of Hong Kong Abstract Image saliency detection has recently witnessed
Deep Learning for Computer Vision II
 IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
2.1 Optimized Importance Map
 3rd International Conference on Multimedia Technology(ICMT 2013) Improved Image Resizing using Seam Carving and scaling Yan Zhang 1, Jonathan Z. Sun, Jingliang Peng Abstract. Seam Carving, the popular
3rd International Conference on Multimedia Technology(ICMT 2013) Improved Image Resizing using Seam Carving and scaling Yan Zhang 1, Jonathan Z. Sun, Jingliang Peng Abstract. Seam Carving, the popular
AS an important and challenging problem in computer
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. XX, NO. X, 2X DeepSaliency: Multi-Task Deep Neural Network Model for Salient Object Detection Xi Li, Liming Zhao, Lina Wei, Ming-Hsuan Yang, Fei Wu, Yueting
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. XX, NO. X, 2X DeepSaliency: Multi-Task Deep Neural Network Model for Salient Object Detection Xi Li, Liming Zhao, Lina Wei, Ming-Hsuan Yang, Fei Wu, Yueting
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
arxiv: v1 [cs.cv] 18 Jun 2017
![arxiv: v1 [cs.cv] 18 Jun 2017](/thumbs/75/72105835.jpg "arxiv: v1 [cs.cv] 18 Jun 2017") Using Deep Networks for Drone Detection arxiv:1706.05726v1 [cs.cv] 18 Jun 2017 Cemal Aker, Sinan Kalkan KOVAN Research Lab. Computer Engineering, Middle East Technical University Ankara, Turkey Abstract
Using Deep Networks for Drone Detection arxiv:1706.05726v1 [cs.cv] 18 Jun 2017 Cemal Aker, Sinan Kalkan KOVAN Research Lab. Computer Engineering, Middle East Technical University Ankara, Turkey Abstract
Image Compression and Resizing Using Improved Seam Carving for Retinal Images
 Image Compression and Resizing Using Improved Seam Carving for Retinal Images Prabhu Nayak 1, Rajendra Chincholi 2, Dr.Kalpana Vanjerkhede 3 1 PG Student, Department of Electronics and Instrumentation
Image Compression and Resizing Using Improved Seam Carving for Retinal Images Prabhu Nayak 1, Rajendra Chincholi 2, Dr.Kalpana Vanjerkhede 3 1 PG Student, Department of Electronics and Instrumentation
Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition
 Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute of Advanced Industrial Science and Technology (AIST) Tsukuba,
Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute of Advanced Industrial Science and Technology (AIST) Tsukuba,
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
FCHD: A fast and accurate head detector
 JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 FCHD: A fast and accurate head detector Aditya Vora, Johnson Controls Inc. arxiv:1809.08766v2 [cs.cv] 26 Sep 2018 Abstract In this paper, we
JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 FCHD: A fast and accurate head detector Aditya Vora, Johnson Controls Inc. arxiv:1809.08766v2 [cs.cv] 26 Sep 2018 Abstract In this paper, we
Amulet: Aggregating Multi-level Convolutional Features for Salient Object Detection
 Amulet: Aggregating Multi-level Convolutional Features for Salient Object Detection Pingping Zhang Dong Wang Huchuan Lu Hongyu Wang Xiang Ruan Dalian University of Technology, China Tiwaki Co.Ltd jssxzhpp@mail.dlut.edu.cn
Amulet: Aggregating Multi-level Convolutional Features for Salient Object Detection Pingping Zhang Dong Wang Huchuan Lu Hongyu Wang Xiang Ruan Dalian University of Technology, China Tiwaki Co.Ltd jssxzhpp@mail.dlut.edu.cn
Edge Detection Using Convolutional Neural Network
 Edge Detection Using Convolutional Neural Network Ruohui Wang (B) Department of Information Engineering, The Chinese University of Hong Kong, Hong Kong, China wr013@ie.cuhk.edu.hk Abstract. In this work,
Edge Detection Using Convolutional Neural Network Ruohui Wang (B) Department of Information Engineering, The Chinese University of Hong Kong, Hong Kong, China wr013@ie.cuhk.edu.hk Abstract. In this work,
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
arxiv: v1 [cs.cv] 6 Jul 2016
![arxiv: v1 [cs.cv] 6 Jul 2016](/thumbs/80/81416563.jpg "arxiv: v1 [cs.cv] 6 Jul 2016") arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
Comparison of Fine-tuning and Extension Strategies for Deep Convolutional Neural Networks
 Comparison of Fine-tuning and Extension Strategies for Deep Convolutional Neural Networks Nikiforos Pittaras 1, Foteini Markatopoulou 1,2, Vasileios Mezaris 1, and Ioannis Patras 2 1 Information Technologies
Comparison of Fine-tuning and Extension Strategies for Deep Convolutional Neural Networks Nikiforos Pittaras 1, Foteini Markatopoulou 1,2, Vasileios Mezaris 1, and Ioannis Patras 2 1 Information Technologies
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Industrial Technology Research Institute, Hsinchu, Taiwan, R.O.C ǂ
 Stop Line Detection and Distance Measurement for Road Intersection based on Deep Learning Neural Network Guan-Ting Lin 1, Patrisia Sherryl Santoso *1, Che-Tsung Lin *ǂ, Chia-Chi Tsai and Jiun-In Guo National
Stop Line Detection and Distance Measurement for Road Intersection based on Deep Learning Neural Network Guan-Ting Lin 1, Patrisia Sherryl Santoso *1, Che-Tsung Lin *ǂ, Chia-Chi Tsai and Jiun-In Guo National
Transfer Learning. Style Transfer in Deep Learning
 Transfer Learning & Style Transfer in Deep Learning 4-DEC-2016 Gal Barzilai, Ram Machlev Deep Learning Seminar School of Electrical Engineering Tel Aviv University Part 1: Transfer Learning in Deep Learning
Transfer Learning & Style Transfer in Deep Learning 4-DEC-2016 Gal Barzilai, Ram Machlev Deep Learning Seminar School of Electrical Engineering Tel Aviv University Part 1: Transfer Learning in Deep Learning
Speaker: Ming-Ming Cheng Nankai University 15-Sep-17 Towards Weakly Supervised Image Understanding
 Towards Weakly Supervised Image Understanding (WSIU) Speaker: Ming-Ming Cheng Nankai University http://mmcheng.net/ 1/50 Understanding Visual Information Image by kirkh.deviantart.com 2/50 Dataset Annotation
Towards Weakly Supervised Image Understanding (WSIU) Speaker: Ming-Ming Cheng Nankai University http://mmcheng.net/ 1/50 Understanding Visual Information Image by kirkh.deviantart.com 2/50 Dataset Annotation