SELF-BALANCING SEARCH TREES. Chapter 11
|
|
|
- Darren Allison
- 6 years ago
- Views:
Transcription
1 SELF-BALANCING SEARCH TREES Chapter 11
2 Tree Balance and Rotation Section 11.1

3 Algorithm for Rotation BTNode root = left right = data = 10 BTNode = left right = data = 20 BTNode NULL = left right = NULL data = 40 BTNode NULL = left right = data = 5 BTNode NULL = left right = NULL data = 15 BTNode NULL = left right = NULL data = 7
4 Algorithm for Rotation (cont.) root BTNode temp BTNode = left right = data = 10 = left right = data = 20 BTNode NULL = left right = NULL data = 40 BTNode NULL = left right = data = 5 BTNode NULL = left right = NULL data = Remember value of root->left (temp = root->left) BTNode NULL = left right = NULL data = 7
5 Algorithm for Rotation (cont.) root BTNode temp BTNode = left right = data = 10 = left right = data = 20 BTNode NULL = left right = NULL data = 40 BTNode NULL = left right = data = 5 BTNode NULL = left right = NULL data = Remember value of root->left (temp = root->left) 2. Set root->left to value of temp->right BTNode NULL = left right = NULL data = 7
6 Algorithm for Rotation (cont.) root BTNode temp BTNode = left right = data = 10 = left right = data = 20 BTNode NULL = left right = NULL data = 40 BTNode NULL = left right = data = 5 BTNode BTNode NULL = left right = NULL data = Remember value of root->left (temp = root->left) 2. Set root->left to value of temp->right 3. Set temp->right to root NULL = left right = NULL data = 7
7 Algorithm for Rotation (cont.) root BTNode temp BTNode = left right = data = 10 = left right = data = 20 BTNode NULL = left right = NULL data = 40 BTNode NULL = left right = data = 5 BTNode BTNode NULL = left right = NULL data = Remember value of root->left (temp = root->left) 2. Set root->left to value of temp->right 3. Set temp->right to root 4. Set root to temp NULL = left right = NULL data = 7
8 Algorithm for Rotation (cont.) root BTNode BTNode NULL = left right = data = 5 = left right = data = 10 BTNode = left right = data = 20 BTNode NULL = left right = NULL data = 7 BTNode NULL = left right = NULL data = 15 BTNode NULL = left right = NULL data = 40
9 Implementing Rotation (cont.)
10 AVL Trees Section 11.2


11 Implementing an AVL Tree
12 Implementing an AVL Tree (cont.)
13 Implementing an AVL Tree (cont.)
14 The AVLNode Class
15 Inserting into an AVL Tree The easiest way to keep a tree balanced is never to let it remain critically unbalanced If any node becomes critical, rebalance immediately Identify critical nodes by checking the balance at the root node as you return along the insertion path
16 Inserting into an AVL Tree (cont.) Algorithm for Insertion into an AVL Tree 1. if the root is NULL 2. Create a new tree with the item at the root and return true else if the item is equal to root->data 3. The item is already in the tree; return false else if the item is less than root->data 4. Recursively insert the item in the left subtree. 5. if the height of the left subtree has increased (increase is true) 6. Decrement balance 7. if balance is zero, reset increase to false 8. if balance is less than 1 9. Reset increase to false. 10. Perform a rebalance_left else if the item is greater than root->data 11. The processing is symmetric to Steps 4 through 10. Note that balance is incremented if increase is true.
17 Recursive insert Function The recursive insert function is called by the insert starter function (see the AVL_Tree Class Definition) /** Insert an item into the tree. post: The item is in the local_root A reference to the current item The item to be true only if the item was not already in the tree */ virtual bool insert(btnode<item_type>*& local_root, const Item_Type& item) { if (local_root == NULL) { local_root = new AVLNode<Item_Type>(item); increase = true; return true; }
18 Recursive insert Function (cont.) if (item < local_root->data) { bool return_value = insert(local_root->left, item); if (increase) { AVLNode<Item_Type>* AVL_local_root = dynamic_cast<avlnode<item_type>*>(local_root); switch (AVL_local_root->balance) { case AVLNode<Item_Type>::BALANCED : // local root is now left heavy AVL_local_root->balance = AVLNode<Item_Type>::LEFT_HEAVY; break; case AVLNode<Item_Type>::RIGHT_HEAVY : // local root is now right heavy AVL_local_root->balance = AVLNode<Item_Type>::BALANCED; // Overall height of local root remains the same increase = false; break;
19 Recursive insert Function (cont.) case AVLNode<Item_Type>::LEFT_HEAVY : // local root is now critically unbalanced rebalance_left(local_root); increase = false; break; } // End switch } // End (if increase) retyrn return_value } // End (if item <local_root->data) else { increase = false return false; }
20 Recursive insert Function (cont.)
21 Initial Algorithm for rebalance_left Initial Algorithm for rebalanceleft 1. if the left subtree has positive balance (Left-Right case) 2. Rotate left around left subtree root. 3. Rotate right.
22 Effect of Rotations on Balance The rebalance algorithm on the previous slide is incomplete as the balance of the nodes has not been adjusted For a Left-Left tree the balances of the new root node and of its right child are 0 after a right rotation Left-Right is more complicated: the balance of the root is 0
23 Effect of Rotations on Balance (cont.) if the critically unbalanced situation was due to an insertion into subtree b L (Left-Right-Left case), the balance of the root's left child is 0 and the balance of the root's right child is +1
24 Effect of Rotations on Balance (cont.) if the critically unbalanced situation was due to an insertion into subtree b R (Left-Right-Right case), the balance of the root's left child is -1 and the balance of the root's right child is 0
25 Revised Algorithm for rebalance_left Revised Algorithm for rebalance_left 1.if the left subtree has a positive balance (Left-Right case) 2. if the left-right subtree has a negative balance (Left-Right-Left case) 3. Set the left subtree (new left subtree) balance to 0 4. Set the left-left subtree (new root) balance to 0 5. Set the local root (new right subtree) balance to else if the left-right subtree has a positive balance (Left-Right-Right case) 7. Set the left subtree (new left subtree) balance to 1 8. Set the left-left subtree (new root) balance to 0 9. Set the local root (new right subtree) balance to else (Left-Right Balanced case) 11. Set the left subtree (new left subtree) balance to Set the left-left subtree (new root) balance to Set the local root (new right subtree) balance to Rotate the left subtree left 15.else (Left-Left case) 16. Set the left subtree balance to Set the local root balance to 0 18.Rotate the local root right
26 Function rebalance_left
27 Removal from an AVL Tree Removal from a left subtree, increases the balance of the local root from a right subtree, decreases the balance of the local root The binary search tree removal function can be adapted for removal from an AVL tree A data field decrease tells the previous level in the recursion that there was a decrease in the height of the subtree from which the return occurred The local root balance is incremented or decremented based on this field If the balance is outside the threshold, a rebalance function is called to restore balance
28 Removal from an AVL Tree (cont.) Functions rebalance_left, and rebalance_right need to be modified so that they set the balance value correctly if the left (or right) subtree is balanced When a subtree changes from either left-heavy or rightheavy to balanced, then the height has decreased, and decrease should remain true When the subtree changes from balanced to either leftheavy or right-heavy, then decrease should be reset to false Each recursive return can result in a further need to rebalance
29 Performance of the AVL Tree Since each subtree is kept close to balanced, the AVL has expected O(log n) Each subtree is allowed to be out of balance ±1 so the tree may contain some holes In the worst case (which is rare) an AVL tree can be 1.44 times the height of a full binary tree that contains the same number of items Ignoring constants, this still yields O(log n) performance Empirical tests show that on average log 2 n comparisons are required to insert the nth item into an AVL tree close to insertion into a corresponding complete binary search tree
30 GRAPHS Chapter 12
31 Overview of the Hierarchy


32 Class Graph
33 Implementation
34 The iterator and iter_impl Classes
35 The iterator and iter_impl Classes
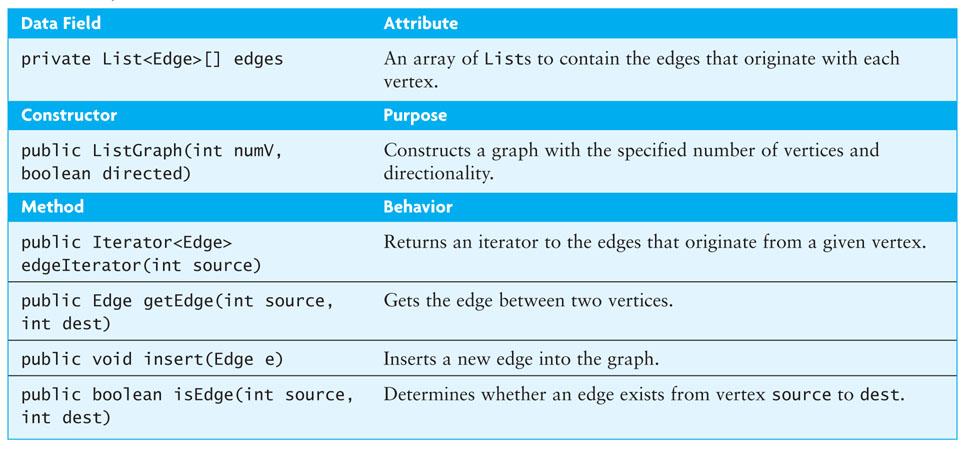
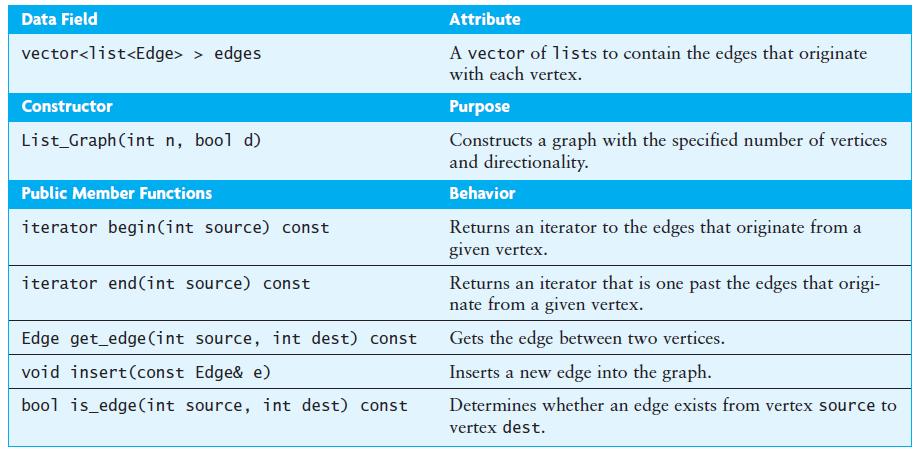
36 The List_Graph Class
37 The List_Graph Class (cont.)
38 The List_Graph Class (cont.)
39 The List_Graph Class (cont.)
40 The Constructor
41 41 The is_edge Function
42 42 The get-edge Function (cont.)
43 43 The insert Function
44 44 The begin Function

45 45 The end Function
46 46 The List_Graph::iter_impl Class The List_Graph::iter_impl class is a subclass of the Graph::iter_impl class Recall that the Graph::iter_impl class is abstract, and that all of its member functions are abstract The List_Graph::iter_impl class provides implementations of the minimum iterator functions that are defined for the Graph::iterator We designed the Graph::iterator this way to provide a common interface for iterators defined for different Graph implementations If we had only the List_Graph, we could use the list<edge>::iterator directly as the Graph::iterator
47 47 The List_Graph::iter_impl Class (cont.) One major difference between the Graph::iterator and other iterator classes is the behavior of the dereferencing operator (operator*()) In other iterator classes we have shown, the dereferencing operator returns a reference to the object that the iterator refers to Thus the iterator can be used to change the value of the object referred to. (This is why we define both an iterator and const_iterator) The Graph::iterator, and thus the iter_impl classes, however, return a copy of the referenced Edge object Thus changes made to an Edge via a Graph::iterator will not change the Edge within the graph
48 48 The List_Graph::iter_impl Class (cont.)
49 The Matrix_Graph Class The Matrix_Graph class extends the Graph class by providing an internal representation using a twodimensional array for storing edge weights This array is implemented by dynamically allocating an array of dynamically allocated arrays double** edges; Upon creation of a Matrix_Graph object, the constructor sets the number of rows (vertices)
50 The Matrix_Graph Class For a directed graph, each row is then allocated to hold the same number of columns, one for each vertex For an undirected graph, only the lower diagonal of the array is needed Thus the first row has one column, the second two, and so on The is_edge and get_edge functions, when operating on an undirected graph, must test to see whether the destination is greater than the source, if it is, they then must access the row indicated by the destination and the column indicated by the source
51 The Matrix_Graph Class The iter_impl class presents a challenge An iter_impl object must keep track of the current source (row) and current destination (column) The dereferencing operator (operator*) must then create and return an Edge object (This is why we designed the Graph::iterator to return an Edge value rather than an Edge reference) The other complication for the iter_impl class is the increment operator When this operator is called, the iterator must be advanced to the next defined edge, skipping those columns whose weights are infinity The implementation of the Matrix_Graph is left as a project
52 Comparing Implementations Time efficiency depends on the algorithm and the density of the graph The density of a graph is the ratio of E to V 2 A dense graph is one in which E is close to, but less than V 2 A sparse graph is one in which E is much less than V 2 We can assume that E is O( V 2 ) for a dense graph O( V ) for a sparse graph
53 Comparing Implementations (cont.) Many graph algorithms are of the form: 1. for each vertex u in the graph 2. for each vertex v adjacent to u 3. Do something with edge (u, v) For an adjacency list Step 1 is O( V ) Step 2 is O( E u ) E u is the number of edges that originate at vertex u The combination of Steps 1 and 2 represents examining each edge in the graph, giving O( E )
54 Comparing Implementations (cont.) Many graph algorithms are of the form: 1. for each vertex u in the graph 2. for each vertex v adjacent to u 3. Do something with edge (u, v) For an adjacency matrix Step 1 is O( V ) Step 2 is O( V ) The combination of Steps 1 and 2 represents examining each edge in the graph, giving O( V 2 ) The adjacency list gives better performance in a sparse graph, whereas for a dense graph the performance is the same for both representations
55 Comparing Implementations (cont.) Some graph algorithms are of the form: 1. for each vertex u in some subset of the vertices 2. for each vertex v in some subset of the vertices 3. if (u, v) is an edge 4. Do something with edge (u, v) For an adjacency matrix representation, Step 3 tests a matrix value and is O(1) The overall algorithm is O( V 2 )
56 Comparing Implementations (cont.) Some graph algorithms are of the form: 1. for each vertex u in some subset of the vertices 2. for each vertex v in some subset of the vertices 3. if (u, v) is an edge 4. Do something with edge (u, v) For an adjacency list representation, Step 3 searches a list and is O( E u ) So the combination of Steps 2 and 3 is O( E ) The overall algorithm is O( V E )
57 Comparing Implementations (cont.) Some graph algorithms are of the form: 1. for each vertex u in some subset of the vertices 2. for each vertex v in some subset of the vertices 3. if (u, v) is an edge 4. Do something with edge (u, v) For a dense graph, the adjacency matrix gives better performance For a sparse graph, the performance is the same for both representations
58 Comparing Implementations (cont.) Thus, for time efficiency, if the graph is dense, the adjacency matrix representation is better if the graph is sparse, the adjacency list representation is better A sparse graph will lead to a sparse matrix, or one where most entries are infinity These values are not included in a list representation so they have no effect on the processing time They are included in a matrix representation, however, and will have an undesirable impact on processing time
59 Storage Efficiency In an adjacency matrix, storage is allocated for all vertex combinations (or at least half of them) the storage required is proportional to V 2 for a sparse graph, there is a lot of wasted space In an adjacency list, each edge is represented by an Edge object containing data about the source, destination, and weight there are also pointers to the next and previous edges in the list this is five times the storage needed for a matrix representation (which stores only the weight) if we use a single-linked list we could reduce this to four times the storage since the pointer to the previous edge would be eliminated
60 Comparing Implementations (cont.) The break-even point in terms of storage efficiency occurs when approximately 20% of the adjacency matrix is filled with meaningful data That is, the adjacency list uses less (more) storage when less than (more than) 20 percent of the adjacency matrix would be filled
61 Traversals of Graphs Section 12.4
62 Algorithm for Breadth-First Search
63 Algorithm for Breadth-First Search (cont.) We can build a tree that represents the order in which vertices will be visited in a breadth-first traversal The tree has all of the vertices and some of the edges of the original graph A path starting at the root to any vertex in the tree is the shortest path in the original graph to that vertex (considering all edges to have the same weight)
64 Algorithm for Breadth-First Search (cont.) We can save the information we need to represent the tree by storing the parent of each vertex when we identify it We refine Step 7 of the algorithm to accomplish this: 7.1 Insert vertex v into the queue 7.2 Set the parent of v to u
65 Performance Analysis of Breadth- First Search The loop at Step 2 is performed for each vertex The inner loop at Step 4 is performed for E v, the number of edges that originate at that vertex) The total number of steps is the sum of the edges that originate at each vertex, which is the total number of edges The algorithm is O( E )
66 Implementing Breadth-First Search
67 Implementing Breadth-First Search (cont.) The method returns vector parent which can be used to construct the breadth-first search tree If we run the breadth_first_search function on the graph we just traversed, parent will be filled with the values shown on the right
68 Implementing Breadth-First Search (cont.) If we compare vector parent to the top right figure, we see that parent[i] is the parent of vertex i For example, the parent of vertex 4 is vertex 1 The entry parent[0] is 1 because node 0 is the start vertex
 Although vector parent could be used to construct the breadth-first search tree, generally we are not interested in the complete tree but rather in the path from the root to a given vertex Using")
69 Implementing Breadth-First Search (cont.) Although vector parent could be used to construct the breadth-first search tree, generally we are not interested in the complete tree but rather in the path from the root to a given vertex Using vector parent to trace the path from that vertex back to the root gives the reverse of the desired path The desired path is realized by pushing the vertices onto a stack, and then popping the stack until it is empty
70 Depth-First Search In a depth-first search, start at a vertex, visit it, choose one adjacent vertex to visit; then, choose a vertex adjacent to that vertex to visit, and so on until you can go no further; then back up and see whether a new vertex can be found
71 Algorithm for Depth-First Search
72 Performance Analysis of Depth-First Search The loop at Step 2 is executed E v times The recursive call results in this loop being applied to each vertex The total number of steps is the sum of the edges that originate at each vertex, which is the total number of edges, E The algorithm is O( E ) An implicit Step 0 marks all of the vertices as unvisited O( V ) The total running time of the algorithm is O( V + E )
73 Implementing Depth-First Search The function depth_first_search performs a depth-first search on a graph and records the start time finish time start order finish order For an unconnected graph or for a directed graph, a depth-first search may not visit each vertex in the graph Thus, once the recursive method returns, all vertices need to be examined to see if they have been visited if not the process repeats on the next unvisited vertex Thus, a depth-first search may generate more than one tree A collection of unconnected trees is called a forest
74 Implementing Depth-First Search (cont.)
75 Implementing Depth-First Search (cont.)
76 Implementing Depth-First Search (cont.)
77 Testing Function depth_first_search
78 Application of Graph Traversals Section 12.5
79 Problem Design a program that finds the shortest path through a maze A recursive solution is not guaranteed to find an optimal solution (On the next slide, you will see that this is a consequence of the program advancing the solution path to the south before attempting to advance it to the east) We want to find the shortest path (defined as the one with the fewest decision points in it)
")
80 Problem (cont.)


81 Analysis We can represent the maze on the previous slide as a graph, with a node at each decision point and each dead end
82 Analysis (cont.) With the maze represented as a graph, we need to find the shortest path from the start point (vertex 0) to the end point (vertex 12) The breadth-first search method returns the shortest path from each vertex to its parents (the vector of parent vertices) We use this vector to find the shortest path to the end point which will contain the smallest number of vertices but not necessarily the smallest number of cells
83 Design The program needs the following data structures: an external representation of the maze, consisting of the number of vertices and the edges an object of a class that implements the Graph interface a vector to hold the predecessors returned from the breadth_first_search function A stack to reverse the path
84 Design (cont.) Algorithm for Shortest Path 1. Read in the number of vertices and create the graph object. 2. Read in the edges and insert the edges into the graph. 3. Call the breadth_first_search function with this graph and the starting vertex as its argument. The function returns the vector parent. 4. Start at v, the end vertex. 5. while v is not 1 6. Push v onto the stack. 7. Set v to parent[v]. 8. while the stack is not empty 9. Pop a vertex off the stack and output it.
85 Implementation

86 Testing Test the program with a variety of mazes. Use mazes for which the original recursive program finds the shortest path and those for which it does not
87 Topological Sort of a Graph This is an example of a directed acyclic graph (DAG) DAGs simulate problems in which one activity cannot be started before another one has been completed It is a directed graph which contains no cycles (i.e. no loops) Once you pass through a vertex, there is no path back to the vertex
88 Another Directed Acyclic Graph (DAG)
89 Topological Sort of a Graph (cont.) A topological sort of the vertices of a DAG is an ordering of the vertices such that is (u, v) is an edge, the u appears before v This must be true for all edges There may be many valid paths through a DAG and many valid topographical sorts of a DAG
90 Topological Sort of a Graph (cont.) 0, 1, 2, 3, 4, 5, 6, 7, 8 is a valid topological sort but 0, 1, 5, 3, 4, 2, 6, 7, 8 is not Another valid topological sort is 0, 3, 1, 4, 6, 2, 5, 7,
91 Analysis If there is an edge from u to v in a DAG, then if we perform a depth-first search of the graph the finish time of u must be after the finish time of v When we return to u, either v has not been visited or it has finished It is not possible for v to be visited but not finished (a loop or cycle would exist)
92 Analysis (cont.) 92 We start the depth first search at
93 Analysis (cont.) Then visit 4 8
94 Analysis (cont.) Followed by 6 8
95 Analysis (cont.) Followed by 8 8
96 Analysis (cont.) Then return to
97 Analysis (cont.) Visit 7 8
98 Analysis (cont.) 98 Then we are able to return to
99 Analysis (cont.) Then we visit 1 8
100 Analysis (cont.) We see that 4 has finished and continue on. 8
101 Design 101 If we perform a depth-first search of a graph and then order the vertices by the inverse of their finish order, we will have one topological sort of a directed acyclic graph
102 Design (cont.) 102 The topological sort produced by listing the vertices in the inverse of their finish order after a depth-first search of the graph to the right is 0, 3, 1, 4, 6, 2, 5, 7,
103 Design (cont.) Algorithm for Topological Sort 1. Read the graph from a data file 2. Perform a depth-first search of the graph 3. List the vertices in reverse of their finish order

104 Implementation
105 Testing Test the program on several different graphs Use sparse graphs and dense graphs Avoid graphs with loops or cycles
106 Algorithms Using Weighted Graphs Section 12.6
107 Dijkstra's Algorithm (cont.)
108 Analysis of Dijkstra's Algorithm Step 1 requires V steps
109 Analysis of Dijkstra's Algorithm (cont.) The loop at Step 2 is executed V-1 times
110 Analysis of Dijkstra's Algorithm (cont.) The loop at Step 7 also is executed V-1 times
111 Analysis of Dijkstra's Algorithm (cont.) Steps 8 and 9 search each value in V-S, which decreases each time through loop 7: V 1 + V This is O( V 2).
112 Analysis of Dijkstra's Algorithm (cont.) Dijkstra's Algorithm is O( V 2 )
113 Implementation
114 Implementation
115 Implementation (cont.) For an adjacency list representation, modify the code: // Update the distances for (Graph::iterator itr = graph.begin(u); itr!= graph.end(u); ++itr) { Edge edge = *itr; int v = edge.get_dest(); if (contains(v_minus_s, v)) { double weight = edge.get_weight(); if (dist[u] + weight < dist[v]) { dist[v] = dist[u] + weight; pred[v] = u; } } }
116 Minimum Spanning Trees A spanning tree is a subset of the edges of a graph such that there is only one edge between any two vertices, and all of the vertices are connected If we have a spanning tree for a graph, then we can access all the vertices of the graph from the start node The cost of a spanning tree is the sum of the weights of the edges We want to find the minimum spanning tree or the spanning tree with the smallest cost
117 Minimum Spanning Trees (cont.) If we want to start up our own long-distance phone company and need to connect the cities shown below, finding the minimum spanning tree would allow us to build the cheapest network The solution to this problem was formulated by R.C. Prim and is very similar to Dijkstra s algorithm Ann Arbor Detroit Toledo Cleveland 130 Pittsburgh 320 Chicago 148 Fort Wayne Philadelphia 180 Indianapolis Columbus
118 Overview of Prim's Algorithm The vertices are divided into two sets: S, the set of vertices in the spanning tree V-S, the remaining vertices As in Dijkstra's algorithm, we maintain two vectors, d[v] contains the length of the shortest edge from a vertex in S to the vertex v that is in V-S p[v] contains the source vertex for that edge The only difference between the two algorithms is the contents of d[v]; in Prim s algorithm, d[v] contains only the length of the final edge
119 Prim s Algorithm (cont.)
120 Analysis of Prim's Algorithm Step 8 is O( V ) and is within loop 7, so it is executed O( V ) times for a total time of O( V 2 )
121 Analysis of Prim's Algorithm (cont.) Step 11 is O( E u ), and is executed for all vertices for a total of O( E )
122 Analysis of Prim's Algorithm (cont.) The overall cost is O( V 2 ) ( V 2 is greater than E )
123 Analysis of Prim's Algorithm (cont.)
124 Analysis of Prim's Algorithm (cont.)
125 Analysis of Prim's Algorithm (cont.)
126 Implementation
127 Implementation
Algorithm Design (8) Graph Algorithms 1/2
 Graph Algorithms 1/2") Graph Algorithm Design (8) Graph Algorithms / Graph:, : A finite set of vertices (or nodes) : A finite set of edges (or arcs or branches) each of which connect two vertices Takashi Chikayama School of
Graph Algorithm Design (8) Graph Algorithms / Graph:, : A finite set of vertices (or nodes) : A finite set of edges (or arcs or branches) each of which connect two vertices Takashi Chikayama School of
Graphs & Digraphs Tuesday, November 06, 2007
 Graphs & Digraphs Tuesday, November 06, 2007 10:34 PM 16.1 Directed Graphs (digraphs) like a tree but w/ no root node & no guarantee of paths between nodes consists of: nodes/vertices - a set of elements
Graphs & Digraphs Tuesday, November 06, 2007 10:34 PM 16.1 Directed Graphs (digraphs) like a tree but w/ no root node & no guarantee of paths between nodes consists of: nodes/vertices - a set of elements
Chapter 14. Graphs Pearson Addison-Wesley. All rights reserved 14 A-1
 Chapter 14 Graphs 2011 Pearson Addison-Wesley. All rights reserved 14 A-1 Terminology G = {V, E} A graph G consists of two sets A set V of vertices, or nodes A set E of edges A subgraph Consists of a subset
Chapter 14 Graphs 2011 Pearson Addison-Wesley. All rights reserved 14 A-1 Terminology G = {V, E} A graph G consists of two sets A set V of vertices, or nodes A set E of edges A subgraph Consists of a subset
The ADT priority queue Orders its items by a priority value The first item removed is the one having the highest priority value
 The ADT priority queue Orders its items by a priority value The first item removed is the one having the highest priority value 1 Possible implementations Sorted linear implementations o Appropriate if
The ADT priority queue Orders its items by a priority value The first item removed is the one having the highest priority value 1 Possible implementations Sorted linear implementations o Appropriate if
Direct Addressing Hash table: Collision resolution how handle collisions Hash Functions:
 Direct Addressing - key is index into array => O(1) lookup Hash table: -hash function maps key to index in table -if universe of keys > # table entries then hash functions collision are guaranteed => need
Direct Addressing - key is index into array => O(1) lookup Hash table: -hash function maps key to index in table -if universe of keys > # table entries then hash functions collision are guaranteed => need
COSC 2007 Data Structures II Final Exam. Part 1: multiple choice (1 mark each, total 30 marks, circle the correct answer)
") COSC 2007 Data Structures II Final Exam Thursday, April 13 th, 2006 This is a closed book and closed notes exam. There are total 3 parts. Please answer the questions in the provided space and use back
COSC 2007 Data Structures II Final Exam Thursday, April 13 th, 2006 This is a closed book and closed notes exam. There are total 3 parts. Please answer the questions in the provided space and use back
Graphs Introduction and Depth first algorithm
 Graphs Introduction and Depth first algorithm Carol Zander Introduction to graphs Graphs are extremely common in computer science applications because graphs are common in the physical world. Everywhere
Graphs Introduction and Depth first algorithm Carol Zander Introduction to graphs Graphs are extremely common in computer science applications because graphs are common in the physical world. Everywhere
Graphs. The ultimate data structure. graphs 1
 Graphs The ultimate data structure graphs 1 Definition of graph Non-linear data structure consisting of nodes & links between them (like trees in this sense) Unlike trees, graph nodes may be completely
Graphs The ultimate data structure graphs 1 Definition of graph Non-linear data structure consisting of nodes & links between them (like trees in this sense) Unlike trees, graph nodes may be completely
Graph: representation and traversal
 Graph: representation and traversal CISC4080, Computer Algorithms CIS, Fordham Univ. Instructor: X. Zhang! Acknowledgement The set of slides have use materials from the following resources Slides for textbook
Graph: representation and traversal CISC4080, Computer Algorithms CIS, Fordham Univ. Instructor: X. Zhang! Acknowledgement The set of slides have use materials from the following resources Slides for textbook
Graph Algorithms. Chapter 22. CPTR 430 Algorithms Graph Algorithms 1
 Graph Algorithms Chapter 22 CPTR 430 Algorithms Graph Algorithms Why Study Graph Algorithms? Mathematical graphs seem to be relatively specialized and abstract Why spend so much time and effort on algorithms
Graph Algorithms Chapter 22 CPTR 430 Algorithms Graph Algorithms Why Study Graph Algorithms? Mathematical graphs seem to be relatively specialized and abstract Why spend so much time and effort on algorithms
DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI. Department of Computer Science and Engineering CS6301 PROGRAMMING DATA STRUCTURES II
 DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI Department of Computer Science and Engineering CS6301 PROGRAMMING DATA STRUCTURES II Anna University 2 & 16 Mark Questions & Answers Year / Semester: II / III
DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI Department of Computer Science and Engineering CS6301 PROGRAMMING DATA STRUCTURES II Anna University 2 & 16 Mark Questions & Answers Year / Semester: II / III
Chapter 9. Priority Queue
 Chapter 9 Priority Queues, Heaps, Graphs Spring 2015 1 Priority Queue Priority Queue An ADT in which only the item with the highest priority can be accessed 2Spring 2015 Priority Depends on the Application
Chapter 9 Priority Queues, Heaps, Graphs Spring 2015 1 Priority Queue Priority Queue An ADT in which only the item with the highest priority can be accessed 2Spring 2015 Priority Depends on the Application
FINALTERM EXAMINATION Fall 2009 CS301- Data Structures Question No: 1 ( Marks: 1 ) - Please choose one The data of the problem is of 2GB and the hard
 - Please choose one The data of the problem is of 2GB and the hard") FINALTERM EXAMINATION Fall 2009 CS301- Data Structures Question No: 1 The data of the problem is of 2GB and the hard disk is of 1GB capacity, to solve this problem we should Use better data structures
FINALTERM EXAMINATION Fall 2009 CS301- Data Structures Question No: 1 The data of the problem is of 2GB and the hard disk is of 1GB capacity, to solve this problem we should Use better data structures
CSC 172 Data Structures and Algorithms. Lecture 24 Fall 2017
 CSC 172 Data Structures and Algorithms Lecture 24 Fall 2017 ANALYSIS OF DIJKSTRA S ALGORITHM CSC 172, Fall 2017 Implementation and analysis The initialization requires Q( V ) memory and run time We iterate
CSC 172 Data Structures and Algorithms Lecture 24 Fall 2017 ANALYSIS OF DIJKSTRA S ALGORITHM CSC 172, Fall 2017 Implementation and analysis The initialization requires Q( V ) memory and run time We iterate
Graphs. Tessema M. Mengistu Department of Computer Science Southern Illinois University Carbondale Room - Faner 3131
 Graphs Tessema M. Mengistu Department of Computer Science Southern Illinois University Carbondale tessema.mengistu@siu.edu Room - Faner 3131 1 Outline Introduction to Graphs Graph Traversals Finding a
Graphs Tessema M. Mengistu Department of Computer Science Southern Illinois University Carbondale tessema.mengistu@siu.edu Room - Faner 3131 1 Outline Introduction to Graphs Graph Traversals Finding a
ROOT: A node which doesn't have a parent. In the above tree. The Root is A.
 TREE: A tree is a finite set of one or more nodes such that there is a specially designated node called the Root, and zero or more non empty sub trees T 1, T 2...T k, each of whose roots are connected
TREE: A tree is a finite set of one or more nodes such that there is a specially designated node called the Root, and zero or more non empty sub trees T 1, T 2...T k, each of whose roots are connected
CS102 Binary Search Trees
 CS102 Binary Search Trees Prof Tejada 1 To speed up insertion, removal and search, modify the idea of a Binary Tree to create a Binary Search Tree (BST) Binary Search Trees Binary Search Trees have one
CS102 Binary Search Trees Prof Tejada 1 To speed up insertion, removal and search, modify the idea of a Binary Tree to create a Binary Search Tree (BST) Binary Search Trees Binary Search Trees have one
COMP 251 Winter 2017 Online quizzes with answers
 COMP 251 Winter 2017 Online quizzes with answers Open Addressing (2) Which of the following assertions are true about open address tables? A. You cannot store more records than the total number of slots
COMP 251 Winter 2017 Online quizzes with answers Open Addressing (2) Which of the following assertions are true about open address tables? A. You cannot store more records than the total number of slots
Tutorial AVL TREES. arra[5] = {1,2,3,4,5} arrb[8] = {20,30,80,40,10,60,50,70} FIGURE 1 Equivalent Binary Search and AVL Trees. arra = {1, 2, 3, 4, 5}
![Tutorial AVL TREES. arra[5] = {1,2,3,4,5} arrb[8] = {20,30,80,40,10,60,50,70} FIGURE 1 Equivalent Binary Search and AVL Trees. arra = {1, 2, 3, 4, 5}](/thumbs/86/94767179.jpg "Tutorial AVL TREES. arra[5] = {1,2,3,4,5} arrb[8] = {20,30,80,40,10,60,50,70} FIGURE 1 Equivalent Binary Search and AVL Trees. arra = {1, 2, 3, 4, 5}") 1 Tutorial AVL TREES Binary search trees are designed for efficient access to data. In some cases, however, a binary search tree is degenerate or "almost degenerate" with most of the n elements descending
1 Tutorial AVL TREES Binary search trees are designed for efficient access to data. In some cases, however, a binary search tree is degenerate or "almost degenerate" with most of the n elements descending
Graphs. The ultimate data structure. graphs 1
 Graphs The ultimate data structure graphs 1 Definition of graph Non-linear data structure consisting of nodes & links between them (like trees in this sense) Unlike trees, graph nodes may be completely
Graphs The ultimate data structure graphs 1 Definition of graph Non-linear data structure consisting of nodes & links between them (like trees in this sense) Unlike trees, graph nodes may be completely
CS 310 Advanced Data Structures and Algorithms
 CS 0 Advanced Data Structures and Algorithms Weighted Graphs July 0, 07 Tong Wang UMass Boston CS 0 July 0, 07 / Weighted Graphs Each edge has a weight (cost) Edge-weighted graphs Mostly we consider only
CS 0 Advanced Data Structures and Algorithms Weighted Graphs July 0, 07 Tong Wang UMass Boston CS 0 July 0, 07 / Weighted Graphs Each edge has a weight (cost) Edge-weighted graphs Mostly we consider only
CS 310 Advanced Data Structures and Algorithms
 CS 31 Advanced Data Structures and Algorithms Graphs July 18, 17 Tong Wang UMass Boston CS 31 July 18, 17 1 / 4 Graph Definitions Graph a mathematical construction that describes objects and relations
CS 31 Advanced Data Structures and Algorithms Graphs July 18, 17 Tong Wang UMass Boston CS 31 July 18, 17 1 / 4 Graph Definitions Graph a mathematical construction that describes objects and relations
Advanced Set Representation Methods
 Advanced Set Representation Methods AVL trees. 2-3(-4) Trees. Union-Find Set ADT DSA - lecture 4 - T.U.Cluj-Napoca - M. Joldos 1 Advanced Set Representation. AVL Trees Problem with BSTs: worst case operation
Advanced Set Representation Methods AVL trees. 2-3(-4) Trees. Union-Find Set ADT DSA - lecture 4 - T.U.Cluj-Napoca - M. Joldos 1 Advanced Set Representation. AVL Trees Problem with BSTs: worst case operation
Outline. Graphs. Divide and Conquer.
 GRAPHS COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Outline Graphs.
GRAPHS COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Outline Graphs.
Final Examination CSE 100 UCSD (Practice)
") Final Examination UCSD (Practice) RULES: 1. Don t start the exam until the instructor says to. 2. This is a closed-book, closed-notes, no-calculator exam. Don t refer to any materials other than the exam
Final Examination UCSD (Practice) RULES: 1. Don t start the exam until the instructor says to. 2. This is a closed-book, closed-notes, no-calculator exam. Don t refer to any materials other than the exam
CS302 - Data Structures using C++
 CS302 - Data Structures using C++ Topic: Graphs - Introduction Kostas Alexis Terminology In the context of our course, graphs represent relations among data items G = {V,E} A graph is a set of vertices
CS302 - Data Structures using C++ Topic: Graphs - Introduction Kostas Alexis Terminology In the context of our course, graphs represent relations among data items G = {V,E} A graph is a set of vertices
R10 SET - 1. Code No: R II B. Tech I Semester, Supplementary Examinations, May
 www.jwjobs.net R10 SET - 1 II B. Tech I Semester, Supplementary Examinations, May - 2012 (Com. to CSE, IT, ECC ) Time: 3 hours Max Marks: 75 *******-****** 1. a) Which of the given options provides the
www.jwjobs.net R10 SET - 1 II B. Tech I Semester, Supplementary Examinations, May - 2012 (Com. to CSE, IT, ECC ) Time: 3 hours Max Marks: 75 *******-****** 1. a) Which of the given options provides the
Data Structures Question Bank Multiple Choice
 Section 1. Fundamentals: Complexity, Algorthm Analysis 1. An algorithm solves A single problem or function Multiple problems or functions Has a single programming language implementation 2. A solution
Section 1. Fundamentals: Complexity, Algorthm Analysis 1. An algorithm solves A single problem or function Multiple problems or functions Has a single programming language implementation 2. A solution
CSE 373 Final Exam 3/14/06 Sample Solution
 Question 1. (6 points) A priority queue is a data structure that supports storing a set of values, each of which has an associated key. Each key-value pair is an entry in the priority queue. The basic
Question 1. (6 points) A priority queue is a data structure that supports storing a set of values, each of which has an associated key. Each key-value pair is an entry in the priority queue. The basic
1. Graph and Representation
 Chapter Graphs Tree Root Direction: parent-child relationships No cycles Graph Vertices + Edges No tree restrictions Examples World Wide Web Maps. Graph and Representation A graph G: a pair (V, E) vertices
Chapter Graphs Tree Root Direction: parent-child relationships No cycles Graph Vertices + Edges No tree restrictions Examples World Wide Web Maps. Graph and Representation A graph G: a pair (V, E) vertices
Lecture Notes. char myarray [ ] = {0, 0, 0, 0, 0 } ; The memory diagram associated with the array can be drawn like this
![Lecture Notes. char myarray [ ] = {0, 0, 0, 0, 0 } ; The memory diagram associated with the array can be drawn like this](/thumbs/80/81612702.jpg "Lecture Notes. char myarray [ ] = {0, 0, 0, 0, 0 } ; The memory diagram associated with the array can be drawn like this") Lecture Notes Array Review An array in C++ is a contiguous block of memory. Since a char is 1 byte, then an array of 5 chars is 5 bytes. For example, if you execute the following C++ code you will allocate
Lecture Notes Array Review An array in C++ is a contiguous block of memory. Since a char is 1 byte, then an array of 5 chars is 5 bytes. For example, if you execute the following C++ code you will allocate
CSE 373 NOVEMBER 20 TH TOPOLOGICAL SORT
 CSE 373 NOVEMBER 20 TH TOPOLOGICAL SORT PROJECT 3 500 Internal Error problems Hopefully all resolved (or close to) P3P1 grades are up (but muted) Leave canvas comment Emails tomorrow End of quarter GRAPHS
CSE 373 NOVEMBER 20 TH TOPOLOGICAL SORT PROJECT 3 500 Internal Error problems Hopefully all resolved (or close to) P3P1 grades are up (but muted) Leave canvas comment Emails tomorrow End of quarter GRAPHS
 CS6301 Programming and Data Structures II Unit -5 REPRESENTATION OF GRAPHS Graph and its representations Graph is a data structure that consists of following two components: 1. A finite set of vertices
CS6301 Programming and Data Structures II Unit -5 REPRESENTATION OF GRAPHS Graph and its representations Graph is a data structure that consists of following two components: 1. A finite set of vertices
8. Write an example for expression tree. [A/M 10] (A+B)*((C-D)/(E^F))
![8. Write an example for expression tree. [A/M 10] (A+B)*((C-D)/(E^F))](/thumbs/89/97773603.jpg "8. Write an example for expression tree. [A/M 10] (A+B)*((C-D)/(E^F))") DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING EC6301 OBJECT ORIENTED PROGRAMMING AND DATA STRUCTURES UNIT IV NONLINEAR DATA STRUCTURES Part A 1. Define Tree [N/D 08]
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING EC6301 OBJECT ORIENTED PROGRAMMING AND DATA STRUCTURES UNIT IV NONLINEAR DATA STRUCTURES Part A 1. Define Tree [N/D 08]
Scribes: Romil Verma, Juliana Cook (2015), Virginia Williams, Date: May 1, 2017 and Seth Hildick-Smith (2016), G. Valiant (2017), M.
, Virginia Williams, Date: May 1, 2017 and Seth Hildick-Smith (2016), G. Valiant (2017), M.") Lecture 9 Graphs Scribes: Romil Verma, Juliana Cook (2015), Virginia Williams, Date: May 1, 2017 and Seth Hildick-Smith (2016), G. Valiant (2017), M. Wootters (2017) 1 Graphs A graph is a set of vertices
Lecture 9 Graphs Scribes: Romil Verma, Juliana Cook (2015), Virginia Williams, Date: May 1, 2017 and Seth Hildick-Smith (2016), G. Valiant (2017), M. Wootters (2017) 1 Graphs A graph is a set of vertices
CS-301 Data Structure. Tariq Hanif
 1. The tree data structure is a Linear data structure Non-linear data structure Graphical data structure Data structure like queue FINALTERM EXAMINATION Spring 2012 CS301- Data Structure 25-07-2012 2.
1. The tree data structure is a Linear data structure Non-linear data structure Graphical data structure Data structure like queue FINALTERM EXAMINATION Spring 2012 CS301- Data Structure 25-07-2012 2.
End-Term Examination Second Semester [MCA] MAY-JUNE 2006
![End-Term Examination Second Semester [MCA] MAY-JUNE 2006](/thumbs/79/79983336.jpg "End-Term Examination Second Semester [MCA] MAY-JUNE 2006") (Please write your Roll No. immediately) Roll No. Paper Code: MCA-102 End-Term Examination Second Semester [MCA] MAY-JUNE 2006 Subject: Data Structure Time: 3 Hours Maximum Marks: 60 Note: Question 1.
(Please write your Roll No. immediately) Roll No. Paper Code: MCA-102 End-Term Examination Second Semester [MCA] MAY-JUNE 2006 Subject: Data Structure Time: 3 Hours Maximum Marks: 60 Note: Question 1.
CSE 100 Minimum Spanning Trees Prim s and Kruskal
 CSE 100 Minimum Spanning Trees Prim s and Kruskal Your Turn The array of vertices, which include dist, prev, and done fields (initialize dist to INFINITY and done to false ): V0: dist= prev= done= adj:
CSE 100 Minimum Spanning Trees Prim s and Kruskal Your Turn The array of vertices, which include dist, prev, and done fields (initialize dist to INFINITY and done to false ): V0: dist= prev= done= adj:
Trees. Eric McCreath
 Trees Eric McCreath 2 Overview In this lecture we will explore: general trees, binary trees, binary search trees, and AVL and B-Trees. 3 Trees Trees are recursive data structures. They are useful for:
Trees Eric McCreath 2 Overview In this lecture we will explore: general trees, binary trees, binary search trees, and AVL and B-Trees. 3 Trees Trees are recursive data structures. They are useful for:
CS 561, Lecture 10. Jared Saia University of New Mexico
 CS 561, Lecture 10 Jared Saia University of New Mexico Today s Outline The path that can be trodden is not the enduring and unchanging Path. The name that can be named is not the enduring and unchanging
CS 561, Lecture 10 Jared Saia University of New Mexico Today s Outline The path that can be trodden is not the enduring and unchanging Path. The name that can be named is not the enduring and unchanging
Prelim 2 Solution. CS 2110, November 19, 2015, 7:30 PM Total. Sorting Invariants Max Score Grader
 Prelim 2 CS 2110, November 19, 2015, 7:30 PM 1 2 3 4 5 6 Total Question True Short Complexity Searching Trees Graphs False Answer Sorting Invariants Max 20 15 13 14 17 21 100 Score Grader The exam is closed
Prelim 2 CS 2110, November 19, 2015, 7:30 PM 1 2 3 4 5 6 Total Question True Short Complexity Searching Trees Graphs False Answer Sorting Invariants Max 20 15 13 14 17 21 100 Score Grader The exam is closed
Self-Balancing Search Trees. Chapter 11
 Self-Balancing Search Trees Chapter 11 Chapter Objectives To understand the impact that balance has on the performance of binary search trees To learn about the AVL tree for storing and maintaining a binary
Self-Balancing Search Trees Chapter 11 Chapter Objectives To understand the impact that balance has on the performance of binary search trees To learn about the AVL tree for storing and maintaining a binary
A6-R3: DATA STRUCTURE THROUGH C LANGUAGE
 A6-R3: DATA STRUCTURE THROUGH C LANGUAGE NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions. 2. PART ONE is to be answered in the TEAR-OFF
A6-R3: DATA STRUCTURE THROUGH C LANGUAGE NOTE: 1. There are TWO PARTS in this Module/Paper. PART ONE contains FOUR questions and PART TWO contains FIVE questions. 2. PART ONE is to be answered in the TEAR-OFF
Design and Analysis of Algorithms - - Assessment
 X Courses» Design and Analysis of Algorithms Week 1 Quiz 1) In the code fragment below, start and end are integer values and prime(x) is a function that returns true if x is a prime number and false otherwise.
X Courses» Design and Analysis of Algorithms Week 1 Quiz 1) In the code fragment below, start and end are integer values and prime(x) is a function that returns true if x is a prime number and false otherwise.
Graph Algorithms. Andreas Klappenecker. [based on slides by Prof. Welch]
![Graph Algorithms. Andreas Klappenecker. [based on slides by Prof. Welch]](/thumbs/81/84350835.jpg "Graph Algorithms. Andreas Klappenecker. [based on slides by Prof. Welch]") Graph Algorithms Andreas Klappenecker [based on slides by Prof. Welch] 1 Directed Graphs Let V be a finite set and E a binary relation on V, that is, E VxV. Then the pair G=(V,E) is called a directed graph.
Graph Algorithms Andreas Klappenecker [based on slides by Prof. Welch] 1 Directed Graphs Let V be a finite set and E a binary relation on V, that is, E VxV. Then the pair G=(V,E) is called a directed graph.
Prelim 2. CS 2110, November 19, 2015, 7:30 PM Total. Sorting Invariants Max Score Grader
 Prelim 2 CS 2110, November 19, 2015, 7:30 PM 1 2 3 4 5 6 Total Question True Short Complexity Searching Trees Graphs False Answer Sorting Invariants Max 20 15 13 14 17 21 100 Score Grader The exam is closed
Prelim 2 CS 2110, November 19, 2015, 7:30 PM 1 2 3 4 5 6 Total Question True Short Complexity Searching Trees Graphs False Answer Sorting Invariants Max 20 15 13 14 17 21 100 Score Grader The exam is closed
UNIT III TREES. A tree is a non-linear data structure that is used to represents hierarchical relationships between individual data items.
 UNIT III TREES A tree is a non-linear data structure that is used to represents hierarchical relationships between individual data items. Tree: A tree is a finite set of one or more nodes such that, there
UNIT III TREES A tree is a non-linear data structure that is used to represents hierarchical relationships between individual data items. Tree: A tree is a finite set of one or more nodes such that, there
Data Structures Brett Bernstein
 Data Structures Brett Bernstein Final Review 1. Consider a binary tree of height k. (a) What is the maximum number of nodes? (b) What is the maximum number of leaves? (c) What is the minimum number of
Data Structures Brett Bernstein Final Review 1. Consider a binary tree of height k. (a) What is the maximum number of nodes? (b) What is the maximum number of leaves? (c) What is the minimum number of
( ) n 3. n 2 ( ) D. Ο
 n 3. n 2 ( ) D. Ο") CSE 0 Name Test Summer 0 Last Digits of Mav ID # Multiple Choice. Write your answer to the LEFT of each problem. points each. The time to multiply two n n matrices is: A. Θ( n) B. Θ( max( m,n, p) ) C.
CSE 0 Name Test Summer 0 Last Digits of Mav ID # Multiple Choice. Write your answer to the LEFT of each problem. points each. The time to multiply two n n matrices is: A. Θ( n) B. Θ( max( m,n, p) ) C.
CSE 100: GRAPH ALGORITHMS
 CSE 100: GRAPH ALGORITHMS Dijkstra s Algorithm: Questions Initialize the graph: Give all vertices a dist of INFINITY, set all done flags to false Start at s; give s dist = 0 and set prev field to -1 Enqueue
CSE 100: GRAPH ALGORITHMS Dijkstra s Algorithm: Questions Initialize the graph: Give all vertices a dist of INFINITY, set all done flags to false Start at s; give s dist = 0 and set prev field to -1 Enqueue
D. Θ nlogn ( ) D. Ο. ). Which of the following is not necessarily true? . Which of the following cannot be shown as an improvement? D.
 D. Ο. ). Which of the following is not necessarily true? . Which of the following cannot be shown as an improvement? D.") CSE 0 Name Test Fall 00 Last Digits of Mav ID # Multiple Choice. Write your answer to the LEFT of each problem. points each. The time to convert an array, with priorities stored at subscripts through n,
CSE 0 Name Test Fall 00 Last Digits of Mav ID # Multiple Choice. Write your answer to the LEFT of each problem. points each. The time to convert an array, with priorities stored at subscripts through n,
CSci 231 Final Review
 CSci 231 Final Review Here is a list of topics for the final. Generally you are responsible for anything discussed in class (except topics that appear italicized), and anything appearing on the homeworks.
CSci 231 Final Review Here is a list of topics for the final. Generally you are responsible for anything discussed in class (except topics that appear italicized), and anything appearing on the homeworks.
UNIT Name the different ways of representing a graph? a.adjacencymatrix b. Adjacency list
 UNIT-4 Graph: Terminology, Representation, Traversals Applications - spanning trees, shortest path and Transitive closure, Topological sort. Sets: Representation - Operations on sets Applications. 1. Name
UNIT-4 Graph: Terminology, Representation, Traversals Applications - spanning trees, shortest path and Transitive closure, Topological sort. Sets: Representation - Operations on sets Applications. 1. Name
L10 Graphs. Alice E. Fischer. April Alice E. Fischer L10 Graphs... 1/37 April / 37
 L10 Graphs lice. Fischer pril 2016 lice. Fischer L10 Graphs... 1/37 pril 2016 1 / 37 Outline 1 Graphs efinition Graph pplications Graph Representations 2 Graph Implementation 3 Graph lgorithms Sorting
L10 Graphs lice. Fischer pril 2016 lice. Fischer L10 Graphs... 1/37 pril 2016 1 / 37 Outline 1 Graphs efinition Graph pplications Graph Representations 2 Graph Implementation 3 Graph lgorithms Sorting
Prelim 2 Solution. CS 2110, November 19, 2015, 5:30 PM Total. Sorting Invariants Max Score Grader
 Prelim 2 CS 2110, November 19, 2015, 5:30 PM 1 2 3 4 5 6 Total Question True Short Complexity Searching Trees Graphs False Answer Sorting Invariants Max 20 15 13 14 17 21 100 Score Grader The exam is closed
Prelim 2 CS 2110, November 19, 2015, 5:30 PM 1 2 3 4 5 6 Total Question True Short Complexity Searching Trees Graphs False Answer Sorting Invariants Max 20 15 13 14 17 21 100 Score Grader The exam is closed
CS 125 Section #6 Graph Traversal and Linear Programs 10/13/14
 CS 125 Section #6 Graph Traversal and Linear Programs 10/13/14 1 Depth first search 1.1 The Algorithm Besides breadth first search, which we saw in class in relation to Dijkstra s algorithm, there is one
CS 125 Section #6 Graph Traversal and Linear Programs 10/13/14 1 Depth first search 1.1 The Algorithm Besides breadth first search, which we saw in class in relation to Dijkstra s algorithm, there is one
Graph. Vertex. edge. Directed Graph. Undirected Graph
 Module : Graphs Dr. Natarajan Meghanathan Professor of Computer Science Jackson State University Jackson, MS E-mail: natarajan.meghanathan@jsums.edu Graph Graph is a data structure that is a collection
Module : Graphs Dr. Natarajan Meghanathan Professor of Computer Science Jackson State University Jackson, MS E-mail: natarajan.meghanathan@jsums.edu Graph Graph is a data structure that is a collection
Question Paper Code : 97044
 Reg. No. : Question Paper Code : 97044 B.E./B.Tech. DEGREE EXAMINATION NOVEMBER/DECEMBER 2014 Third Semester Computer Science and Engineering CS 6301 PROGRAMMING AND DATA STRUCTURES-II (Regulation 2013)
Reg. No. : Question Paper Code : 97044 B.E./B.Tech. DEGREE EXAMINATION NOVEMBER/DECEMBER 2014 Third Semester Computer Science and Engineering CS 6301 PROGRAMMING AND DATA STRUCTURES-II (Regulation 2013)
Priority Queues. 04/10/03 Lecture 22 1
 Priority Queues It is a variant of queues Each item has an associated priority value. When inserting an item in the queue, the priority value is also provided for it. The data structure provides a method
Priority Queues It is a variant of queues Each item has an associated priority value. When inserting an item in the queue, the priority value is also provided for it. The data structure provides a method
CSI 604 Elementary Graph Algorithms
 CSI 604 Elementary Graph Algorithms Ref: Chapter 22 of the text by Cormen et al. (Second edition) 1 / 25 Graphs: Basic Definitions Undirected Graph G(V, E): V is set of nodes (or vertices) and E is the
CSI 604 Elementary Graph Algorithms Ref: Chapter 22 of the text by Cormen et al. (Second edition) 1 / 25 Graphs: Basic Definitions Undirected Graph G(V, E): V is set of nodes (or vertices) and E is the
Undirected Graphs. DSA - lecture 6 - T.U.Cluj-Napoca - M. Joldos 1
 Undirected Graphs Terminology. Free Trees. Representations. Minimum Spanning Trees (algorithms: Prim, Kruskal). Graph Traversals (dfs, bfs). Articulation points & Biconnected Components. Graph Matching
Undirected Graphs Terminology. Free Trees. Representations. Minimum Spanning Trees (algorithms: Prim, Kruskal). Graph Traversals (dfs, bfs). Articulation points & Biconnected Components. Graph Matching
Balanced Search Trees. CS 3110 Fall 2010
 Balanced Search Trees CS 3110 Fall 2010 Some Search Structures Sorted Arrays Advantages Search in O(log n) time (binary search) Disadvantages Need to know size in advance Insertion, deletion O(n) need
Balanced Search Trees CS 3110 Fall 2010 Some Search Structures Sorted Arrays Advantages Search in O(log n) time (binary search) Disadvantages Need to know size in advance Insertion, deletion O(n) need
MA/CSSE 473 Day 12. Questions? Insertion sort analysis Depth first Search Breadth first Search. (Introduce permutation and subset generation)
") MA/CSSE 473 Day 12 Interpolation Search Insertion Sort quick review DFS, BFS Topological Sort MA/CSSE 473 Day 12 Questions? Interpolation Search Insertion sort analysis Depth first Search Breadth first
MA/CSSE 473 Day 12 Interpolation Search Insertion Sort quick review DFS, BFS Topological Sort MA/CSSE 473 Day 12 Questions? Interpolation Search Insertion sort analysis Depth first Search Breadth first
Graphs. CSE 2320 Algorithms and Data Structures Alexandra Stefan and Vassilis Athitsos University of Texas at Arlington
 Graphs CSE 2320 Algorithms and Data Structures Alexandra Stefan and Vassilis Athitsos University of Texas at Arlington 1 Representation Adjacency matrix??adjacency lists?? Review Graphs (from CSE 2315)
Graphs CSE 2320 Algorithms and Data Structures Alexandra Stefan and Vassilis Athitsos University of Texas at Arlington 1 Representation Adjacency matrix??adjacency lists?? Review Graphs (from CSE 2315)
S.E. Sem. III [INFT] Data Structures & Analysis. Primitive Linear Non Linear
![S.E. Sem. III [INFT] Data Structures & Analysis. Primitive Linear Non Linear](/thumbs/88/115506064.jpg "S.E. Sem. III [INFT] Data Structures & Analysis. Primitive Linear Non Linear") S.E. Sem. III [INFT] Data Structures & Analysis Time : 3 Hrs.] Prelim Paper Solution [Marks : 80 Q.1(a) Explain different types of data structures with examples. [5] Ans.: Types of Data Structure : Data
S.E. Sem. III [INFT] Data Structures & Analysis Time : 3 Hrs.] Prelim Paper Solution [Marks : 80 Q.1(a) Explain different types of data structures with examples. [5] Ans.: Types of Data Structure : Data
logn D. Θ C. Θ n 2 ( ) ( ) f n B. nlogn Ο n2 n 2 D. Ο & % ( C. Θ # ( D. Θ n ( ) Ω f ( n)
 ( ) f n B. nlogn Ο n2 n 2 D. Ο & % ( C. Θ # ( D. Θ n ( ) Ω f ( n)") CSE 0 Test Your name as it appears on your UTA ID Card Fall 0 Multiple Choice:. Write the letter of your answer on the line ) to the LEFT of each problem.. CIRCLED ANSWERS DO NOT COUNT.. points each. The
CSE 0 Test Your name as it appears on your UTA ID Card Fall 0 Multiple Choice:. Write the letter of your answer on the line ) to the LEFT of each problem.. CIRCLED ANSWERS DO NOT COUNT.. points each. The
Algorithms. AVL Tree
 Algorithms AVL Tree Balanced binary tree The disadvantage of a binary search tree is that its height can be as large as N-1 This means that the time needed to perform insertion and deletion and many other
Algorithms AVL Tree Balanced binary tree The disadvantage of a binary search tree is that its height can be as large as N-1 This means that the time needed to perform insertion and deletion and many other
Trees. (Trees) Data Structures and Programming Spring / 28
 Data Structures and Programming Spring / 28") Trees (Trees) Data Structures and Programming Spring 2018 1 / 28 Trees A tree is a collection of nodes, which can be empty (recursive definition) If not empty, a tree consists of a distinguished node r
Trees (Trees) Data Structures and Programming Spring 2018 1 / 28 Trees A tree is a collection of nodes, which can be empty (recursive definition) If not empty, a tree consists of a distinguished node r
) $ f ( n) " %( g( n)
 $ f ( n) %( g( n)") CSE 0 Name Test Spring 008 Last Digits of Mav ID # Multiple Choice. Write your answer to the LEFT of each problem. points each. The time to compute the sum of the n elements of an integer array is: # A.
CSE 0 Name Test Spring 008 Last Digits of Mav ID # Multiple Choice. Write your answer to the LEFT of each problem. points each. The time to compute the sum of the n elements of an integer array is: # A.
Graphs. Terminology. Graphs & Breadth First Search (BFS) Extremely useful tool in modeling problems. Consist of: Vertices Edges
 Extremely useful tool in modeling problems. Consist of: Vertices Edges") COMP Spring Graphs & BS / Slide Graphs Graphs & Breadth irst Search (BS) Extremely useful tool in modeling problems. Consist of: Vertices Edges Vertex A B D C E Edge Vertices can be considered sites or
COMP Spring Graphs & BS / Slide Graphs Graphs & Breadth irst Search (BS) Extremely useful tool in modeling problems. Consist of: Vertices Edges Vertex A B D C E Edge Vertices can be considered sites or
( D. Θ n. ( ) f n ( ) D. Ο%
 f n ( ) D. Ο%") CSE 0 Name Test Spring 0 Multiple Choice. Write your answer to the LEFT of each problem. points each. The time to run the code below is in: for i=n; i>=; i--) for j=; j
CSE 0 Name Test Spring 0 Multiple Choice. Write your answer to the LEFT of each problem. points each. The time to run the code below is in: for i=n; i>=; i--) for j=; j
E.G.S. PILLAY ENGINEERING COLLEGE (An Autonomous Institution, Affiliated to Anna University, Chennai) Nagore Post, Nagapattinam , Tamilnadu.
 Nagore Post, Nagapattinam , Tamilnadu.") 17CA 104DATA STRUCTURES Academic Year : 018-019 Programme : MCA Year / Semester : I / I Question Bank Course Coordinator: Mrs. C.Mallika Course Objectives The student should be able to 1. To understand
17CA 104DATA STRUCTURES Academic Year : 018-019 Programme : MCA Year / Semester : I / I Question Bank Course Coordinator: Mrs. C.Mallika Course Objectives The student should be able to 1. To understand
UNIT 3. Greedy Method. Design and Analysis of Algorithms GENERAL METHOD
 UNIT 3 Greedy Method GENERAL METHOD Greedy is the most straight forward design technique. Most of the problems have n inputs and require us to obtain a subset that satisfies some constraints. Any subset
UNIT 3 Greedy Method GENERAL METHOD Greedy is the most straight forward design technique. Most of the problems have n inputs and require us to obtain a subset that satisfies some constraints. Any subset
Understand graph terminology Implement graphs using
 raphs Understand graph terminology Implement graphs using djacency lists and djacency matrices Perform graph searches Depth first search Breadth first search Perform shortest-path algorithms Disjkstra
raphs Understand graph terminology Implement graphs using djacency lists and djacency matrices Perform graph searches Depth first search Breadth first search Perform shortest-path algorithms Disjkstra
Binary Search Trees. Analysis of Algorithms
 Binary Search Trees Analysis of Algorithms Binary Search Trees A BST is a binary tree in symmetric order 31 Each node has a key and every node s key is: 19 23 25 35 38 40 larger than all keys in its left
Binary Search Trees Analysis of Algorithms Binary Search Trees A BST is a binary tree in symmetric order 31 Each node has a key and every node s key is: 19 23 25 35 38 40 larger than all keys in its left
9/29/2016. Chapter 4 Trees. Introduction. Terminology. Terminology. Terminology. Terminology
 Introduction Chapter 4 Trees for large input, even linear access time may be prohibitive we need data structures that exhibit average running times closer to O(log N) binary search tree 2 Terminology recursive
Introduction Chapter 4 Trees for large input, even linear access time may be prohibitive we need data structures that exhibit average running times closer to O(log N) binary search tree 2 Terminology recursive
Binary Trees. BSTs. For example: Jargon: Data Structures & Algorithms. root node. level: internal node. edge.
 Binary Trees 1 A binary tree is either empty, or it consists of a node called the root together with two binary trees called the left subtree and the right subtree of the root, which are disjoint from
Binary Trees 1 A binary tree is either empty, or it consists of a node called the root together with two binary trees called the left subtree and the right subtree of the root, which are disjoint from
Priority Queues. 1 Introduction. 2 Naïve Implementations. CSci 335 Software Design and Analysis III Chapter 6 Priority Queues. Prof.
 Priority Queues 1 Introduction Many applications require a special type of queuing in which items are pushed onto the queue by order of arrival, but removed from the queue based on some other priority
Priority Queues 1 Introduction Many applications require a special type of queuing in which items are pushed onto the queue by order of arrival, but removed from the queue based on some other priority
Multi-way Search Trees! M-Way Search! M-Way Search Trees Representation!
 Lecture 10: Multi-way Search Trees: intro to B-trees 2-3 trees 2-3-4 trees Multi-way Search Trees A node on an M-way search tree with M 1 distinct and ordered keys: k 1 < k 2 < k 3
Lecture 10: Multi-way Search Trees: intro to B-trees 2-3 trees 2-3-4 trees Multi-way Search Trees A node on an M-way search tree with M 1 distinct and ordered keys: k 1 < k 2 < k 3
R13. II B. Tech I Semester Supplementary Examinations, May/June DATA STRUCTURES (Com. to ECE, CSE, EIE, IT, ECC)
") SET - 1 II B. Tech I Semester Supplementary Examinations, May/June - 2016 PART A 1. a) Write a procedure for the Tower of Hanoi problem? b) What you mean by enqueue and dequeue operations in a queue? c)
SET - 1 II B. Tech I Semester Supplementary Examinations, May/June - 2016 PART A 1. a) Write a procedure for the Tower of Hanoi problem? b) What you mean by enqueue and dequeue operations in a queue? c)
Lecture Summary CSC 263H. August 5, 2016
 Lecture Summary CSC 263H August 5, 2016 This document is a very brief overview of what we did in each lecture, it is by no means a replacement for attending lecture or doing the readings. 1. Week 1 2.
Lecture Summary CSC 263H August 5, 2016 This document is a very brief overview of what we did in each lecture, it is by no means a replacement for attending lecture or doing the readings. 1. Week 1 2.
CSE100 Practice Final Exam Section C Fall 2015: Dec 10 th, Problem Topic Points Possible Points Earned Grader
 CSE100 Practice Final Exam Section C Fall 2015: Dec 10 th, 2015 Problem Topic Points Possible Points Earned Grader 1 The Basics 40 2 Application and Comparison 20 3 Run Time Analysis 20 4 C++ and Programming
CSE100 Practice Final Exam Section C Fall 2015: Dec 10 th, 2015 Problem Topic Points Possible Points Earned Grader 1 The Basics 40 2 Application and Comparison 20 3 Run Time Analysis 20 4 C++ and Programming
Pred 8 1. Dist. Pred
 CS Graph Algorithms, Page Shortest Path Problem Task: given a graph G, find the shortest path from a vertex u to a vertex v. ffl If all edges are of the same length, then BFS will do. ffl But some times
CS Graph Algorithms, Page Shortest Path Problem Task: given a graph G, find the shortest path from a vertex u to a vertex v. ffl If all edges are of the same length, then BFS will do. ffl But some times
Graph Representation DFS BFS Dijkstra A* Search Bellman-Ford Floyd-Warshall Iterative? Non-iterative? MST Flow Edmond-Karp
 Charles Lin Graph Representation DFS BFS Dijkstra A* Search Bellman-Ford Floyd-Warshall Iterative? Non-iterative? MST Flow Edmond-Karp Adjacency Matrix bool way[100][100]; cin >> i >> j; way[i][j] = true;
Charles Lin Graph Representation DFS BFS Dijkstra A* Search Bellman-Ford Floyd-Warshall Iterative? Non-iterative? MST Flow Edmond-Karp Adjacency Matrix bool way[100][100]; cin >> i >> j; way[i][j] = true;
University of Waterloo Department of Electrical and Computer Engineering ECE 250 Data Structures and Algorithms. Final Examination
 University of Waterloo Department of Electrical and Computer Engineering ECE 250 Data Structures and Algorithms Instructor: Douglas Wilhelm Harder Time: 2.5 hours Aides: none 14 pages Final Examination
University of Waterloo Department of Electrical and Computer Engineering ECE 250 Data Structures and Algorithms Instructor: Douglas Wilhelm Harder Time: 2.5 hours Aides: none 14 pages Final Examination
implementing the breadth-first search algorithm implementing the depth-first search algorithm
 Graph Traversals 1 Graph Traversals representing graphs adjacency matrices and adjacency lists 2 Implementing the Breadth-First and Depth-First Search Algorithms implementing the breadth-first search algorithm
Graph Traversals 1 Graph Traversals representing graphs adjacency matrices and adjacency lists 2 Implementing the Breadth-First and Depth-First Search Algorithms implementing the breadth-first search algorithm
University of Waterloo Department of Electrical and Computer Engineering ECE 250 Data Structures and Algorithms. Final Examination T09:00
 University of Waterloo Department of Electrical and Computer Engineering ECE 250 Data Structures and Algorithms Instructor: Douglas Wilhelm Harder Time: 2.5 hours Aides: none 18 pages Final Examination
University of Waterloo Department of Electrical and Computer Engineering ECE 250 Data Structures and Algorithms Instructor: Douglas Wilhelm Harder Time: 2.5 hours Aides: none 18 pages Final Examination
Representations of Weighted Graphs (as Matrices) Algorithms and Data Structures: Minimum Spanning Trees. Weighted Graphs
 Algorithms and Data Structures: Minimum Spanning Trees. Weighted Graphs") Representations of Weighted Graphs (as Matrices) A B Algorithms and Data Structures: Minimum Spanning Trees 9.0 F 1.0 6.0 5.0 6.0 G 5.0 I H 3.0 1.0 C 5.0 E 1.0 D 28th Oct, 1st & 4th Nov, 2011 ADS: lects
Representations of Weighted Graphs (as Matrices) A B Algorithms and Data Structures: Minimum Spanning Trees 9.0 F 1.0 6.0 5.0 6.0 G 5.0 I H 3.0 1.0 C 5.0 E 1.0 D 28th Oct, 1st & 4th Nov, 2011 ADS: lects
University of Waterloo Department of Electrical and Computer Engineering ECE 250 Data Structures and Algorithms. Final Examination
 ECE 25 Data Structures and Algorithms University of Waterloo Department of Electrical and Computer Engineering ECE 25 Data Structures and Algorithms Instructor: Douglas Wilhelm Harder Time: 2.5 hours Aides:
ECE 25 Data Structures and Algorithms University of Waterloo Department of Electrical and Computer Engineering ECE 25 Data Structures and Algorithms Instructor: Douglas Wilhelm Harder Time: 2.5 hours Aides:
Brute Force: Selection Sort
 Brute Force: Intro Brute force means straightforward approach Usually based directly on problem s specs Force refers to computational power Usually not as efficient as elegant solutions Advantages: Applicable
Brute Force: Intro Brute force means straightforward approach Usually based directly on problem s specs Force refers to computational power Usually not as efficient as elegant solutions Advantages: Applicable
CSE 373 MAY 10 TH SPANNING TREES AND UNION FIND
 CSE 373 MAY 0 TH SPANNING TREES AND UNION FIND COURSE LOGISTICS HW4 due tonight, if you want feedback by the weekend COURSE LOGISTICS HW4 due tonight, if you want feedback by the weekend HW5 out tomorrow
CSE 373 MAY 0 TH SPANNING TREES AND UNION FIND COURSE LOGISTICS HW4 due tonight, if you want feedback by the weekend COURSE LOGISTICS HW4 due tonight, if you want feedback by the weekend HW5 out tomorrow
Course Review for Finals. Cpt S 223 Fall 2008
 Course Review for Finals Cpt S 223 Fall 2008 1 Course Overview Introduction to advanced data structures Algorithmic asymptotic analysis Programming data structures Program design based on performance i.e.,
Course Review for Finals Cpt S 223 Fall 2008 1 Course Overview Introduction to advanced data structures Algorithmic asymptotic analysis Programming data structures Program design based on performance i.e.,
Chapter 9 Graph Algorithms
 Chapter 9 Graph Algorithms 2 Introduction graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 3 Definitions an undirected graph G = (V, E)
Chapter 9 Graph Algorithms 2 Introduction graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 3 Definitions an undirected graph G = (V, E)
CSCI Trees. Mark Redekopp David Kempe
 CSCI 104 2-3 Trees Mark Redekopp David Kempe Trees & Maps/Sets C++ STL "maps" and "sets" use binary search trees internally to store their keys (and values) that can grow or contract as needed This allows
CSCI 104 2-3 Trees Mark Redekopp David Kempe Trees & Maps/Sets C++ STL "maps" and "sets" use binary search trees internally to store their keys (and values) that can grow or contract as needed This allows
MID TERM MEGA FILE SOLVED BY VU HELPER Which one of the following statement is NOT correct.
 MID TERM MEGA FILE SOLVED BY VU HELPER Which one of the following statement is NOT correct. In linked list the elements are necessarily to be contiguous In linked list the elements may locate at far positions
MID TERM MEGA FILE SOLVED BY VU HELPER Which one of the following statement is NOT correct. In linked list the elements are necessarily to be contiguous In linked list the elements may locate at far positions
CS521 \ Notes for the Final Exam
 CS521 \ Notes for final exam 1 Ariel Stolerman Asymptotic Notations: CS521 \ Notes for the Final Exam Notation Definition Limit Big-O ( ) Small-o ( ) Big- ( ) Small- ( ) Big- ( ) Notes: ( ) ( ) ( ) ( )
CS521 \ Notes for final exam 1 Ariel Stolerman Asymptotic Notations: CS521 \ Notes for the Final Exam Notation Definition Limit Big-O ( ) Small-o ( ) Big- ( ) Small- ( ) Big- ( ) Notes: ( ) ( ) ( ) ( )
Sorted Arrays. Operation Access Search Selection Predecessor Successor Output (print) Insert Delete Extract-Min
 Insert Delete Extract-Min") Binary Search Trees FRIDAY ALGORITHMS Sorted Arrays Operation Access Search Selection Predecessor Successor Output (print) Insert Delete Extract-Min 6 10 11 17 2 0 6 Running Time O(1) O(lg n) O(1) O(1)
Binary Search Trees FRIDAY ALGORITHMS Sorted Arrays Operation Access Search Selection Predecessor Successor Output (print) Insert Delete Extract-Min 6 10 11 17 2 0 6 Running Time O(1) O(lg n) O(1) O(1)
CSE 373 OCTOBER 11 TH TRAVERSALS AND AVL
 CSE 373 OCTOBER 11 TH TRAVERSALS AND AVL MINUTIAE Feedback for P1p1 should have gone out before class Grades on canvas tonight Emails went to the student who submitted the assignment If you did not receive
CSE 373 OCTOBER 11 TH TRAVERSALS AND AVL MINUTIAE Feedback for P1p1 should have gone out before class Grades on canvas tonight Emails went to the student who submitted the assignment If you did not receive
11/22/2016. Chapter 9 Graph Algorithms. Introduction. Definitions. Definitions. Definitions. Definitions
 Introduction Chapter 9 Graph Algorithms graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 2 Definitions an undirected graph G = (V, E) is
Introduction Chapter 9 Graph Algorithms graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 2 Definitions an undirected graph G = (V, E) is
Graphs. Data Structures 1 Graphs
 Graphs Graph Applications Definitions Graph Representations(adjacency matrix/list) Graph ADT Graph Traversals: BFS, DFS Shortest Path Algorithms Minimum Spanning Tree Algorithms Data Structures Graphs
Graphs Graph Applications Definitions Graph Representations(adjacency matrix/list) Graph ADT Graph Traversals: BFS, DFS Shortest Path Algorithms Minimum Spanning Tree Algorithms Data Structures Graphs