Shape Model-Based 3D Ear Detection from Side Face Range Images
|
|
|
- Cecilia Hunter
- 5 years ago
- Views:
Transcription
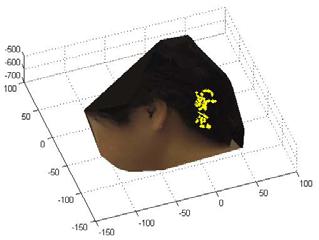
1 Shape Model-Based 3D Ear Detection from Side Face Range Images Hui Chen and Bir Bhanu Center for Research in Intelligent Systems University of California, Riverside, California 92521, USA fhchen, Abstract Ear detection is an important part of an ear recognition system. In this paper we propose a shape model-based technique for locating human ears in side face range images. The ear shape model is represented by a set of discrete 3D vertices corresponding to ear helix and anti-helix parts. Given side face range images, step edges are extracted considering the fact that there are strong step edges around the ear helix part. Then the edge segments are dilated, thinned and grouped into different clusters which are potential regions containing ears. For each cluster, we register the ear shape model with the edges. The region with the minimum mean registration error is declared as the detected ear region; the ear helix and anti-helix parts are meanwhile identified. Experiments are performed with a large number of real face range images to demonstrate the effectiveness of our approach. The contributions of this paper are: (a) a ear shape model for locating 3D ears in side face range images, (b) an effective approach to detect human ears from side face range images, (c) experimental results on a large number of ear images. 1. Introduction Ear is a viable new class of biometrics since the ear has desirable properties such as universality, uniqueness and permanence [1, 2]. For example, ear is rich in features; it is a stable structure which does not change with the age; it doesn t change its shape with facial expressions, cosmetics and hair styles. Although it has certain advantages over other biometrics, the ear has received little attention compared to other popular biometrics such as face, fingerprint and gait [3, 4, 5, 6, 7, 8]. The current research has used intensity images and, therefore, the performance of the systems is greatly affected by imaging problems such as lighting and shadows. Range sensors which are insensitive to above imaging problems can directly provide us 3D geometric information. Therefore, it is desirable to design a human ear recognition system from 3D side face range images obtained at a distance. Human ear detection is the first task of a human ear recognition system and its performance affects the overall quality of the system. In this paper, we propose a simple ear shape model-based technique for locating human ears in side face range images. The ear shape model is represented by a set of discrete 3D vertices corresponding to ear helix and anti-helix parts. Since the two curves formed by ear helix and anti-helix parts are similar for different people, we do not take into account the small deformation of two curves between different persons, which greatly simplifies our ear shape model. Given side face range images, step edges are extracted; then the edge segments are dilated, thinned and grouped into different clusters which are potential regions containing ears. For each cluster, we register the ear shape model with the edges. The region with the minimum mean registration error is declared as the detected ear region; the ear helix and anti-helix parts are meanwhile identified. The rest of paper is organized as follows. Section 2 introduces the related work, motivation and contributions. Section 3 describes our approach to build the ear shape model and detect human ears in side face range images. Section 4 gives the experimental results to demonstrate the effectiveness of our approach. Section 5 provides the conclusions. 2. Related work, motivation and contributions 2.1 Related work There are only a few papers dealing with object detection from range images. We give a brief review of object detection techniques from range images. Chen and Bhanu [9] presented a template matching based detection method for extracting ears from side face range images. The model template is represented by an average histogram of shape index of ears. However this method can not identify the ear region accurately. Garcia et. al [10] generated a unique signature of the 3D object by the Fourier transform of the phase-encoded range image at each specific rotation. The signature defined in a unit sphere permitted the detection of 3D objects by correlation techniques. Heisele and Ritter [11] proposed a method for segmenting temporal sequences of range and intensity images. The fusion of range and intensity data for segmentation was


2 solved by clustering 4D intensity/position features. Kalman filters were then used to stabilize tracking by predicting dynamic changes in cluster positions. Sparbert et. al [12] presented a method to detect lanes and classify street types from range images. First they calculated the lane s width, curvature and relative position to the car, then compared them with a prior knowledge on construction rules of different street types, and finally achieved street type based on the mean value of lane s width. Keller et. al. [13] introduced a fuzzy logic system for automatic target detection from LADAR images. They used two fuzzy logic detection filters and one statistical filter to create pixel-based target confidence values which are fused by the fuzzy integral to generate potential target windows. Features extracted from these windows were fed to a neural network post-processor to make a final decision. Meier and Ade [14] proposed an approach to separate image features into ground and road obstacles by assuming the road was flat. They distinguished obstacles and road pixels using the separating plane. The plane model was updated by fitting a plane through all pixels marked as ground. Connected component analysis was used to partition detected obstacles into different objects. Figure 1. The external ear and its anatomical parts. 2.2 Motivation The anatomical structure of the ear is shown in Figure 1. The ear is made up of standard features like the face. These include the outer rim (helix) and ridges (anti-helix) parallel to the helix, the lobe and the concha which is a hollow part of ear. From Figure 1, we clearly see that two curves formed by ear helix and anti-helix parts are easily identified. We can use these two curves to guide the procedure to locate the ear in side face range images. 2.3 Contributions The contributions of this paper are: (a) We propose a ear shape model for locating 3D ears in side face range images. (b) We develop an effective approach to detect human ears from side face range images. 3. Technical approach 3.1 Ear shape model building Considering the fact that the curves formed by ear helix and anti-helix parts are similar for different people. In this paper, we construct the ear shape model from one person only. We plan to work on building a generic ear model from multi persons. We extract ear helix and anti-helix parts by running step edge detector with different thresholds, choose the best extraction result, and do the edge thinning. By running connected component labeling, we extract the edges which correspond to ear helix and antihelix parts. We define the ear shape model s as 3D co- Figure 2. The textured 3D face and overlaid ear shape model. ordinates fx; y; zg of n vertices which lie on the ear helix and anti-helix parts. s is represented by a 3n 1 vector fx 1 ;y 1 ;z 1 ;x 2 ;y 2 ;z 2 ; ;x n ;y n ;z n g. Figure 2 shows the 3D side face range image with textured appearance, in which the ear shape model s marked by yellow vertices is overlaid. 3.2 Step edge detection and thresholding Given the step face range image, the step edge magnitude, denoted by M step, is calculated as the maximum distance in depth between the center point and its neighbors in a small window [15]. M step can be formulated as follows: M step (i; j) = maxjz(i; j) z(i + k; j + l)j (1) (w 1)=2» k; l» (w 1)=2 where w is the width of the window and z(i; j) is the z coordinate of the point(i; j). To get the step edge magnitude image, a w w window is translated over the original side face range image and the maximum distance cal-
, larger magnitudes are displayed as brighter pixels. We can clearly see that most of the step edge magnitudes are small values.")
 pixels with the largest magnitudes are selected as edge points.")

 Calculate its centroid fμ xj ;μ yj g (b) if maxfjμ xj μ xi j; jμ yj μ yi jg» ffl1 put e j into the cluster C i,removee j and update cluster s centroid.")
3 culated from equation (1) replaces the pixel value of the pixel covered by the center of the window. One example of step edge magnitude image is shown in Figure 3(b). In Figure 3(b), larger magnitudes are displayed as brighter pixels. We can clearly see that most of the step edge magnitudes are small values. To get edges, the step edge magnitude image must be segmented using a threshold operator. The selection of threshold value is based on the cumulative histogram of the step edge magnitude image. Since we are interested in larger magnitudes, in our approach the top ff% (ff = 3:5) pixels with the largest magnitudes are selected as edge points. We can easily determine the threshold by investigating the cumulative histogram. The thresholded binary image is shown in Figure 3(c), while the original side face range image is shown in Figure 3(a). Since the ear region contains several edge segments, we group edge segments which are close to each other into different clusters. The clustering procedure works as follows: For each edge segment e i 1. Initialize e i into a cluster C i, calculate its centroid fμ xi ;μ yi g 2. For each edge segment e j while i 6= j (a) Calculate its centroid fμ xj ;μ yj g (b) if maxfjμ xj μ xi j; jμ yj μ yi jg» ffl1 put e j into the cluster C i,removee j and update cluster s centroid. In the implementation, ffl1 =36 pixels since we like to put ear helix and anti-helix parts into a cluster. Three examples of clustering results are shown in the second row of Figure 5, in which each cluster is bounded by a red rectangular box. The first row of Figure 5 shows side face range images. (a) (b) (c) Figure 3. (a) Original side face range image. (b) Its step edge magnitude image. (c) Its step edge image. 3.3 Edge thinning and connected Component labeling Since some step edge segments are broken, we dilate the binary image to fill the gaps. The dilated image is shown in Figure 4(a). We proceed to do edge thinning and the resulting image is shown in Figure 4(b). The edge segments are labeled by running connected component labeling algorithm and some small edge segments (less than 15 pixels) are removed. The left edge segments are shown in Figure 4(c). (a) (b) (b) Figure 4. (a) Dilated edge image. (b) Thinned edge image. (c) Left edge segments. 3.4 Clustering edge segments 10 segments 5 segments 7 segments 6 clusters 3 clusters 5 clusters Figure 5. Examples of edge clustering results. 3.5 Locating ears by use of the ear shape model For each cluster obtained in the previous step, we extract step edges around ear helix and anti-helix parts. We use a threshold ffl2 = 1:9mm since the step edge magnitudes of vertices in ear anti-helix are at least 1.9mm and the magnitude of vertices in anti-helix part is smaller than that of vertices in the helix part for the collected data. The problem of locating ears is to minimize the mean square error between ear shape model vertices and their corresponding edge vertices in the bounded rectangular box. nx E = 1 jt r (s i ) I(s i )j 2 (2) n l=1 where T r is the rigid transformation and I(s i ) is vertex in the 3D side face image closest to the T r (s i ). Iterative Closest Point (ICP) algorithm developed by Besl and Mckay [16] is well-known method to align 3D shapes. However



![requirement. Therefore, we use a modified ICP algorithm presented by Turk [17] to register the ear shape model with the edge vertices.](/docs-images/80/81839813/images/4-3.jpg "The steps of modified ICP algorithm to register a test shape Y to a model shape X are: 1) Initialize the rotation matrix R 0 and translation vector T 0.")
 Find the rigid transformation (R, T ) such that E is minimized. 5) Apply the transformation (R, T )toy.")

4 Figure 6. Examples of side face range images. of two vertex sets respectively, we run ICP iteratively and finally get the rotation matrix R and translation vector T, which brings the ear shape model vertices and edge vertices into alignment. The cluster with minimum mean square error is declared as the detected ear region; the ear helix and anti-helix parts are meanwhile identified. Figure 7. Distribution of mean square error for positive detection. ICP requires that every point in one set have a corresponding point on the other set, we can t guarantee that edge vertices in the potential regions satisfy this requirement. Therefore, we use a modified ICP algorithm presented by Turk [17] to register the ear shape model with the edge vertices. The steps of modified ICP algorithm to register a test shape Y to a model shape X are: 1) Initialize the rotation matrix R 0 and translation vector T 0. 2) Given each point in Y, find the closest point in X. 3) Discard pairs of points which are too far apart. 4) Find the rigid transformation (R, T ) such that E is minimized. 5) Apply the transformation (R, T )toy. 6) Goto step 2) until the difference je k E k 1 j in two successive steps falls below a threshold or the maximum number of iterations is reached. By initializing the rotation matrix R 0 and translation vector T 0 to the identity matrix and difference of centroids Figure 8. Examples of failed cases. 4. Experimental results 4.1 Data acquisition We use real range data acquired by Minolta Vivid 300. During the acquisition, 52 subjects sit on the chair about 0.55ο0.75m from the camera. The first shot was taken when subject s left side face was approximately parallel to the image plane; two shots were taken when the subject was asked to rotate his/her head to left and right side within ±35 ffi with respect to his/her torso. The same acquisition procedure was repeated. Six images per subject were recorded. Therefore we have 312 images in total. Each range image contains grid points and each grid
5 point has a 3D coordinate (x; y; z). The ear shape model is built from a side face range image described in Section 3.1. Examples of side face range images are shown in Figure Results We test the proposed detection method on 312 side face range images. If the ear shape model is aligned with the ear helix and anti-helix parts, we classify it positive detection; otherwise false detection. In our experiments, the number of vertices of the ear shape model is 113; the average number of edge segments is 6 and the average number of clusters is 4. The average time to detect an ear from a side face range image is 6.5 seconds with Matlab implementation on a 2.4G Celeron CPU. Examples of positive detection results are shown in Figure 9. In Figure 9, the transformed ear shape model marked by yellow points is superimposed on the corresponding textured 3D face. From Figure 9, we can observe that the ear is correctly detected and the ear helix and anti-helix parts are identified from side face range images. The distribution of mean square error defined in equation (2) for positive detection is shown in Figure 7. The mean of mean square error is 1:79mm. We achieve 92.6% detection rate. For the failed cases, we notice that there are some edge segments around the ear region caused by hair, which brings more false edge segments or results in the cluster which can not include the ear helix and antihelix parts. Since ICP algorithm can not converge due to the existence of outliers, the false detection happens, which are shown in Figure 8 and 10. The original face range images and corresponding edge clusters are shown in Figure 8. In this figure, the first row shows face images; the second row shows edge clustering results. The textured 3D faces with overlaid detected ear helix and anti-helix are shown in Figure Conclusions We have proposed a shape model-based technique for locating human ears in side face range images. The ear shape model is represented by a set of discrete 3D vertices corresponding to ear helix and anti-helix parts. Given side face range images, step edges are extracted, dilated, thinned and grouped into different clusters which are potential regions containing ears. For each cluster, we register the ear shape model with the edges. Our method not only detects the ear region, but also identifies the ear helix and anti-helix parts. Experimental results on real face range images demonstrate the effectiveness of our approach. [3] D. Hurley, M. Nixon, and J. Carter, Automatic ear recognition by force field transformations, IEE Colloquium on Visual Biometrics, pp. 7/1 7/5, [4] M. Burge and W. Burger, Ear biometrics in computer vision, Proc. Int. Conf. on Pattern Recognition, vol. 2, pp , [5] K. Chang, K. Bowyer, S. Sarkar, and B. Victor, Comparison and combination of ear and face images in appearance-based biometrics, IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 25, no. 9, pp , [6] B. Bhanu and H. Chen, Human ear recognition in 3D, Workshop on Multimodal User Authentication, pp , [7] H. Chen and B. Bhanu, Contour matching for 3D ear recognition, 7th IEEE Workshops on Application of Computer Vision, vol. 1, pp , [8] P. Yan and K. W. Bowyer, Multi-Biometrics 2D and 3D ear recognition, Audio and Video based Biometric Person Authentication, [9] H. Chen and B. Bhanu, Human ear detection from side face range images, Proc. Int. Conf. on Pattern Recognition, vol. 3, pp , [10] J. Garcia, J. Valles, and C. Ferreira, Detection of threedimensional objects under arbitrary rotations based on range images, Optics Express, vol. 11, no. 25, pp , [11] B. Heisele and W. Ritter, Segmentation of range and intensity image sequences by clustering, Proc. IEEE Conf. on Information Intelligence and Systems, pp , [12] J. Sparbert, K. Dietmayer, and D. Streller, Lane detection and street type classification using laser range images, IEEE Intelligent Transportation Systems conference proceedings, pp , [13] J. M. Keller, P. Gader, R. Krishnapuram, and X. Wang, A fuzzy logic automatic target detection system for LADAR range images, IEEE International Conference on computatinoal intelligence, vol. 1, pp , [14] E. B. Meier and F. Ade, Object detection and tracking in range image sequences by separation of image features, IEEE Internation conference on Intelligent Vehicles, pp , [15] N. Yokoya and M. D. Levine, Range image segmentation based on differential geometry: A hybrid approach, IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 11, no. 6, pp , [16] P. Besl and N. D. Mckay, A method of registration of 3-D shapes, IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 14, no. 2, pp , [17] G. Turk and M. Levoy, Zippered polygon meshes from range images, Proceedings of Conf. on Computer Graphics and Interactive Techniques, pp , References [1] A. Iannarelli, Ear Identification, Forensic Identification Series. Paramont Publishing Company, [2] A. Jain, BIOMETRICS: Personal Identification in Network Society. Kluwer Academic, 1999.




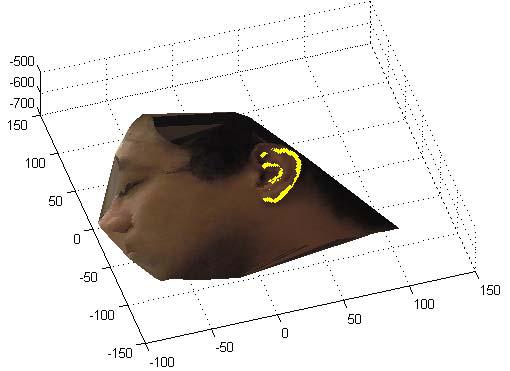
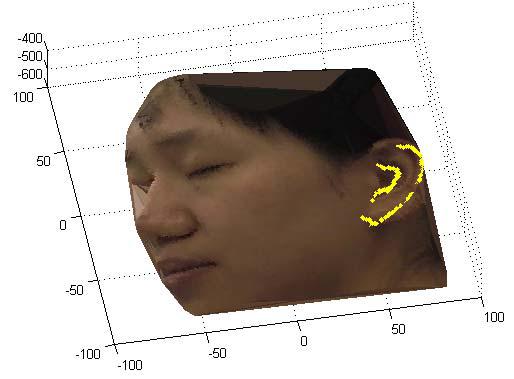
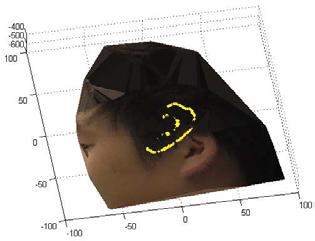
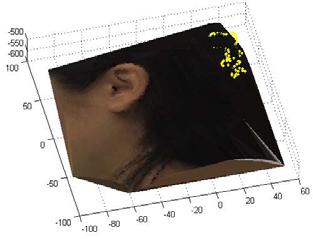
6 Figure 9. Examples of positive detection results Figure 10. Examples of false detection results
Empirical Evaluation of Advanced Ear Biometrics
 Empirical Evaluation of Advanced Ear Biometrics Ping Yan Kevin W. Bowyer Department of Computer Science and Engineering University of Notre Dame, IN 46556 Abstract We present results of the largest experimental
Empirical Evaluation of Advanced Ear Biometrics Ping Yan Kevin W. Bowyer Department of Computer Science and Engineering University of Notre Dame, IN 46556 Abstract We present results of the largest experimental
Ear Recognition based on 2D Images
 Ear Recognition based on 2D Images Li Yuan, Zhi-chun Mu Abstract-Research of ear recognition and its application is a new subject in the field of biometrics authentication. Ear normalization and alignment
Ear Recognition based on 2D Images Li Yuan, Zhi-chun Mu Abstract-Research of ear recognition and its application is a new subject in the field of biometrics authentication. Ear normalization and alignment
Advanced Ear Biometrics for Human Recognition
 International Journal of Computer Systems (ISSN: 2394-1065), Volume 03 Issue 11, November, 2016 Available at http://www.ijcsonline.com/ Sandhiya B Asst.Professor, IT Department, Easwari Engineering College,
International Journal of Computer Systems (ISSN: 2394-1065), Volume 03 Issue 11, November, 2016 Available at http://www.ijcsonline.com/ Sandhiya B Asst.Professor, IT Department, Easwari Engineering College,
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Ear recognition based on Edge Potential Function
 Ear recognition based on Edge Potential Function F. Battisti a,m.carli a, F.G.B. De Natale b,a.neri a a Applied Electronics Department, Universitá degli Studi Roma TRE, Roma, Italy; b University of Trento,
Ear recognition based on Edge Potential Function F. Battisti a,m.carli a, F.G.B. De Natale b,a.neri a a Applied Electronics Department, Universitá degli Studi Roma TRE, Roma, Italy; b University of Trento,
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Biometric Security System Using Palm print
 ISSN (Online) : 2319-8753 ISSN (Print) : 2347-6710 International Journal of Innovative Research in Science, Engineering and Technology Volume 3, Special Issue 3, March 2014 2014 International Conference
ISSN (Online) : 2319-8753 ISSN (Print) : 2347-6710 International Journal of Innovative Research in Science, Engineering and Technology Volume 3, Special Issue 3, March 2014 2014 International Conference
Extracting Layers and Recognizing Features for Automatic Map Understanding. Yao-Yi Chiang
 Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Extracting Layers and Recognizing Features for Automatic Map Understanding Yao-Yi Chiang 0 Outline Introduction/ Problem Motivation Map Processing Overview Map Decomposition Feature Recognition Discussion
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Ear Biometrics Based on Geometrical Method of Feature Extraction
 Ear Biometrics Based on Geometrical Method of Feature Extraction Micha Chora Institute of Telecommunication, University of Technology and Agriculture, ul. Prof. Kaliskiego 7, 85-796, Bydgoszcz, Poland.
Ear Biometrics Based on Geometrical Method of Feature Extraction Micha Chora Institute of Telecommunication, University of Technology and Agriculture, ul. Prof. Kaliskiego 7, 85-796, Bydgoszcz, Poland.
DEFORMABLE MATCHING OF HAND SHAPES FOR USER VERIFICATION. Ani1 K. Jain and Nicolae Duta
 DEFORMABLE MATCHING OF HAND SHAPES FOR USER VERIFICATION Ani1 K. Jain and Nicolae Duta Department of Computer Science and Engineering Michigan State University, East Lansing, MI 48824-1026, USA E-mail:
DEFORMABLE MATCHING OF HAND SHAPES FOR USER VERIFICATION Ani1 K. Jain and Nicolae Duta Department of Computer Science and Engineering Michigan State University, East Lansing, MI 48824-1026, USA E-mail:
Scene Text Detection Using Machine Learning Classifiers
 601 Scene Text Detection Using Machine Learning Classifiers Nafla C.N. 1, Sneha K. 2, Divya K.P. 3 1 (Department of CSE, RCET, Akkikkvu, Thrissur) 2 (Department of CSE, RCET, Akkikkvu, Thrissur) 3 (Department
601 Scene Text Detection Using Machine Learning Classifiers Nafla C.N. 1, Sneha K. 2, Divya K.P. 3 1 (Department of CSE, RCET, Akkikkvu, Thrissur) 2 (Department of CSE, RCET, Akkikkvu, Thrissur) 3 (Department
N.Priya. Keywords Compass mask, Threshold, Morphological Operators, Statistical Measures, Text extraction
 Volume, Issue 8, August ISSN: 77 8X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Combined Edge-Based Text
Volume, Issue 8, August ISSN: 77 8X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Combined Edge-Based Text
Eye Detection by Haar wavelets and cascaded Support Vector Machine
 Eye Detection by Haar wavelets and cascaded Support Vector Machine Vishal Agrawal B.Tech 4th Year Guide: Simant Dubey / Amitabha Mukherjee Dept of Computer Science and Engineering IIT Kanpur - 208 016
Eye Detection by Haar wavelets and cascaded Support Vector Machine Vishal Agrawal B.Tech 4th Year Guide: Simant Dubey / Amitabha Mukherjee Dept of Computer Science and Engineering IIT Kanpur - 208 016
Free-form 3D object reconstruction from range images. C. Schütz, T. Jost, H. Hügli
 Free-form 3D object reconstruction from range images C. Schütz, T. Jost, H. Hügli Institute for Microtechnology University of Neuchatel, rue Breguet 2 CH-2000 Neuchatel, Switzerland email: christian.schutz@imt.unine.ch
Free-form 3D object reconstruction from range images C. Schütz, T. Jost, H. Hügli Institute for Microtechnology University of Neuchatel, rue Breguet 2 CH-2000 Neuchatel, Switzerland email: christian.schutz@imt.unine.ch
Model-based segmentation and recognition from range data
 Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
Reconstruction of complete 3D object model from multi-view range images.
 Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Face Recognition Using Vector Quantization Histogram and Support Vector Machine Classifier Rong-sheng LI, Fei-fei LEE *, Yan YAN and Qiu CHEN
 2016 International Conference on Artificial Intelligence: Techniques and Applications (AITA 2016) ISBN: 978-1-60595-389-2 Face Recognition Using Vector Quantization Histogram and Support Vector Machine
2016 International Conference on Artificial Intelligence: Techniques and Applications (AITA 2016) ISBN: 978-1-60595-389-2 Face Recognition Using Vector Quantization Histogram and Support Vector Machine
3D face recognition based on a modified ICP method
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2011 3D face recognition based on a modified ICP method Kankan Zhao University
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2011 3D face recognition based on a modified ICP method Kankan Zhao University
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Finger Print Enhancement Using Minutiae Based Algorithm
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 8, August 2014,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 8, August 2014,
3D-2D Laser Range Finder calibration using a conic based geometry shape
 3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
I. INTRODUCTION. Figure-1 Basic block of text analysis
 ISSN: 2349-7637 (Online) (RHIMRJ) Research Paper Available online at: www.rhimrj.com Detection and Localization of Texts from Natural Scene Images: A Hybrid Approach Priyanka Muchhadiya Post Graduate Fellow,
ISSN: 2349-7637 (Online) (RHIMRJ) Research Paper Available online at: www.rhimrj.com Detection and Localization of Texts from Natural Scene Images: A Hybrid Approach Priyanka Muchhadiya Post Graduate Fellow,
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Hybrid Biometric Person Authentication Using Face and Voice Features
 Paper presented in the Third International Conference, Audio- and Video-Based Biometric Person Authentication AVBPA 2001, Halmstad, Sweden, proceedings pages 348-353, June 2001. Hybrid Biometric Person
Paper presented in the Third International Conference, Audio- and Video-Based Biometric Person Authentication AVBPA 2001, Halmstad, Sweden, proceedings pages 348-353, June 2001. Hybrid Biometric Person
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Fingerprint Mosaicking &
 72 1. New matching methods for comparing the ridge feature maps of two images. 2. Development of fusion architectures to improve performance of the hybrid matcher. 3. Constructing the ridge feature maps
72 1. New matching methods for comparing the ridge feature maps of two images. 2. Development of fusion architectures to improve performance of the hybrid matcher. 3. Constructing the ridge feature maps
DESIGNING A REAL TIME SYSTEM FOR CAR NUMBER DETECTION USING DISCRETE HOPFIELD NETWORK
 DESIGNING A REAL TIME SYSTEM FOR CAR NUMBER DETECTION USING DISCRETE HOPFIELD NETWORK A.BANERJEE 1, K.BASU 2 and A.KONAR 3 COMPUTER VISION AND ROBOTICS LAB ELECTRONICS AND TELECOMMUNICATION ENGG JADAVPUR
DESIGNING A REAL TIME SYSTEM FOR CAR NUMBER DETECTION USING DISCRETE HOPFIELD NETWORK A.BANERJEE 1, K.BASU 2 and A.KONAR 3 COMPUTER VISION AND ROBOTICS LAB ELECTRONICS AND TELECOMMUNICATION ENGG JADAVPUR
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Fourier Descriptors. Properties and Utility in Leaf Classification. ECE 533 Fall Tyler Karrels
 Fourier Descriptors Properties and Utility in Leaf Classification ECE 533 Fall 2006 Tyler Karrels Introduction Now that large-scale data storage is feasible due to the large capacity and low cost of hard
Fourier Descriptors Properties and Utility in Leaf Classification ECE 533 Fall 2006 Tyler Karrels Introduction Now that large-scale data storage is feasible due to the large capacity and low cost of hard
Texture Segmentation by Windowed Projection
 Texture Segmentation by Windowed Projection 1, 2 Fan-Chen Tseng, 2 Ching-Chi Hsu, 2 Chiou-Shann Fuh 1 Department of Electronic Engineering National I-Lan Institute of Technology e-mail : fctseng@ccmail.ilantech.edu.tw
Texture Segmentation by Windowed Projection 1, 2 Fan-Chen Tseng, 2 Ching-Chi Hsu, 2 Chiou-Shann Fuh 1 Department of Electronic Engineering National I-Lan Institute of Technology e-mail : fctseng@ccmail.ilantech.edu.tw
Peg-Free Hand Geometry Verification System
 Peg-Free Hand Geometry Verification System Pavan K Rudravaram Venu Govindaraju Center for Unified Biometrics and Sensors (CUBS), University at Buffalo,New York,USA. {pkr, govind} @cedar.buffalo.edu http://www.cubs.buffalo.edu
Peg-Free Hand Geometry Verification System Pavan K Rudravaram Venu Govindaraju Center for Unified Biometrics and Sensors (CUBS), University at Buffalo,New York,USA. {pkr, govind} @cedar.buffalo.edu http://www.cubs.buffalo.edu
CPSC 695. Geometric Algorithms in Biometrics. Dr. Marina L. Gavrilova
 CPSC 695 Geometric Algorithms in Biometrics Dr. Marina L. Gavrilova Biometric goals Verify users Identify users Synthesis - recently Biometric identifiers Courtesy of Bromba GmbH Classification of identifiers
CPSC 695 Geometric Algorithms in Biometrics Dr. Marina L. Gavrilova Biometric goals Verify users Identify users Synthesis - recently Biometric identifiers Courtesy of Bromba GmbH Classification of identifiers
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Light source estimation using feature points from specular highlights and cast shadows
 Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Logical Templates for Feature Extraction in Fingerprint Images
 Logical Templates for Feature Extraction in Fingerprint Images Bir Bhanu, Michael Boshra and Xuejun Tan Center for Research in Intelligent Systems University of Califomia, Riverside, CA 9252 1, USA Email:
Logical Templates for Feature Extraction in Fingerprint Images Bir Bhanu, Michael Boshra and Xuejun Tan Center for Research in Intelligent Systems University of Califomia, Riverside, CA 9252 1, USA Email:
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Scanning Real World Objects without Worries 3D Reconstruction
 Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Computationally Efficient Serial Combination of Rotation-invariant and Rotation Compensating Iris Recognition Algorithms
 Computationally Efficient Serial Combination of Rotation-invariant and Rotation Compensating Iris Recognition Algorithms Andreas Uhl Department of Computer Sciences University of Salzburg, Austria uhl@cosy.sbg.ac.at
Computationally Efficient Serial Combination of Rotation-invariant and Rotation Compensating Iris Recognition Algorithms Andreas Uhl Department of Computer Sciences University of Salzburg, Austria uhl@cosy.sbg.ac.at
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
Keywords Wavelet decomposition, SIFT, Unibiometrics, Multibiometrics, Histogram Equalization.
 Volume 3, Issue 7, July 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Secure and Reliable
Volume 3, Issue 7, July 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Secure and Reliable
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
World Journal of Engineering Research and Technology WJERT
 wjert, 2016, Vol. 2, Issue 5, 224-233 ReviewArticle ISSN 2454-695X WJERT SJIF Impact Factor: 3.419 EAR BASED BIOMETRIC AUTHENTICATION SYSTEM 1 Ranjita Chowdhury, Dalia Ghosh, 1 Puja Agarwal and 2* Prof.
wjert, 2016, Vol. 2, Issue 5, 224-233 ReviewArticle ISSN 2454-695X WJERT SJIF Impact Factor: 3.419 EAR BASED BIOMETRIC AUTHENTICATION SYSTEM 1 Ranjita Chowdhury, Dalia Ghosh, 1 Puja Agarwal and 2* Prof.
Feature-level Fusion for Effective Palmprint Authentication
 Feature-level Fusion for Effective Palmprint Authentication Adams Wai-Kin Kong 1, 2 and David Zhang 1 1 Biometric Research Center, Department of Computing The Hong Kong Polytechnic University, Kowloon,
Feature-level Fusion for Effective Palmprint Authentication Adams Wai-Kin Kong 1, 2 and David Zhang 1 1 Biometric Research Center, Department of Computing The Hong Kong Polytechnic University, Kowloon,
I CP Fusion Techniques for 3D Face Recognition
 I CP Fusion Techniques for 3D Face Recognition Robert McKeon University of Notre Dame Notre Dame, Indiana, USA rmckeon@nd.edu Patrick Flynn University of Notre Dame Notre Dame, Indiana, USA flynn@nd.edu
I CP Fusion Techniques for 3D Face Recognition Robert McKeon University of Notre Dame Notre Dame, Indiana, USA rmckeon@nd.edu Patrick Flynn University of Notre Dame Notre Dame, Indiana, USA flynn@nd.edu
Range Image Registration with Edge Detection in Spherical Coordinates
 Range Image Registration with Edge Detection in Spherical Coordinates Olcay Sertel 1 and Cem Ünsalan2 Computer Vision Research Laboratory 1 Department of Computer Engineering 2 Department of Electrical
Range Image Registration with Edge Detection in Spherical Coordinates Olcay Sertel 1 and Cem Ünsalan2 Computer Vision Research Laboratory 1 Department of Computer Engineering 2 Department of Electrical
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
Cover Page. Abstract ID Paper Title. Automated extraction of linear features from vehicle-borne laser data
 Cover Page Abstract ID 8181 Paper Title Automated extraction of linear features from vehicle-borne laser data Contact Author Email Dinesh Manandhar (author1) dinesh@skl.iis.u-tokyo.ac.jp Phone +81-3-5452-6417
Cover Page Abstract ID 8181 Paper Title Automated extraction of linear features from vehicle-borne laser data Contact Author Email Dinesh Manandhar (author1) dinesh@skl.iis.u-tokyo.ac.jp Phone +81-3-5452-6417
Biometrics Technology: Multi-modal (Part 2)
") Biometrics Technology: Multi-modal (Part 2) References: At the Level: [M7] U. Dieckmann, P. Plankensteiner and T. Wagner, "SESAM: A biometric person identification system using sensor fusion ", Pattern
Biometrics Technology: Multi-modal (Part 2) References: At the Level: [M7] U. Dieckmann, P. Plankensteiner and T. Wagner, "SESAM: A biometric person identification system using sensor fusion ", Pattern
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Task analysis based on observing hands and objects by vision
 Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
9.913 Pattern Recognition for Vision. Class 8-2 An Application of Clustering. Bernd Heisele
 9.913 Class 8-2 An Application of Clustering Bernd Heisele Fall 2003 Overview Problem Background Clustering for Tracking Examples Literature Homework Problem Detect objects on the road: Cars, trucks, motorbikes,
9.913 Class 8-2 An Application of Clustering Bernd Heisele Fall 2003 Overview Problem Background Clustering for Tracking Examples Literature Homework Problem Detect objects on the road: Cars, trucks, motorbikes,
Landmark Detection on 3D Face Scans by Facial Model Registration
 Landmark Detection on 3D Face Scans by Facial Model Registration Tristan Whitmarsh 1, Remco C. Veltkamp 2, Michela Spagnuolo 1 Simone Marini 1, Frank ter Haar 2 1 IMATI-CNR, Genoa, Italy 2 Dept. Computer
Landmark Detection on 3D Face Scans by Facial Model Registration Tristan Whitmarsh 1, Remco C. Veltkamp 2, Michela Spagnuolo 1 Simone Marini 1, Frank ter Haar 2 1 IMATI-CNR, Genoa, Italy 2 Dept. Computer
Face Tracking. Synonyms. Definition. Main Body Text. Amit K. Roy-Chowdhury and Yilei Xu. Facial Motion Estimation
 Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Critique: Efficient Iris Recognition by Characterizing Key Local Variations
 Critique: Efficient Iris Recognition by Characterizing Key Local Variations Authors: L. Ma, T. Tan, Y. Wang, D. Zhang Published: IEEE Transactions on Image Processing, Vol. 13, No. 6 Critique By: Christopher
Critique: Efficient Iris Recognition by Characterizing Key Local Variations Authors: L. Ma, T. Tan, Y. Wang, D. Zhang Published: IEEE Transactions on Image Processing, Vol. 13, No. 6 Critique By: Christopher
Gurmeet Kaur 1, Parikshit 2, Dr. Chander Kant 3 1 M.tech Scholar, Assistant Professor 2, 3
 Volume 8 Issue 2 March 2017 - Sept 2017 pp. 72-80 available online at www.csjournals.com A Novel Approach to Improve the Biometric Security using Liveness Detection Gurmeet Kaur 1, Parikshit 2, Dr. Chander
Volume 8 Issue 2 March 2017 - Sept 2017 pp. 72-80 available online at www.csjournals.com A Novel Approach to Improve the Biometric Security using Liveness Detection Gurmeet Kaur 1, Parikshit 2, Dr. Chander
Fusion of Hand Geometry and Palmprint Biometrics
 (Working Paper, Dec. 2003) Fusion of Hand Geometry and Palmprint Biometrics D.C.M. Wong, C. Poon and H.C. Shen * Department of Computer Science, Hong Kong University of Science and Technology, Clear Water
(Working Paper, Dec. 2003) Fusion of Hand Geometry and Palmprint Biometrics D.C.M. Wong, C. Poon and H.C. Shen * Department of Computer Science, Hong Kong University of Science and Technology, Clear Water
Recent Advances in Electrical Engineering and Educational Technologies. Human Identification based on Ear Recognition
 Human Identification based on Ear Recognition S. Gangaram 1, and S. Viriri 1,2 ABSTRACT Biometrics is the identification of humans based on their characteristics or traits. This paper presents the study
Human Identification based on Ear Recognition S. Gangaram 1, and S. Viriri 1,2 ABSTRACT Biometrics is the identification of humans based on their characteristics or traits. This paper presents the study
Graph Geometric Approach and Bow Region Based Finger Knuckle Biometric Identification System
 _ Graph Geometric Approach and Bow Region Based Finger Knuckle Biometric Identification System K.Ramaraj 1, T.Ummal Sariba Begum 2 Research scholar, Assistant Professor in Computer Science, Thanthai Hans
_ Graph Geometric Approach and Bow Region Based Finger Knuckle Biometric Identification System K.Ramaraj 1, T.Ummal Sariba Begum 2 Research scholar, Assistant Professor in Computer Science, Thanthai Hans
Outline. Incorporating Biometric Quality In Multi-Biometrics FUSION. Results. Motivation. Image Quality: The FVC Experience
 Incorporating Biometric Quality In Multi-Biometrics FUSION QUALITY Julian Fierrez-Aguilar, Javier Ortega-Garcia Biometrics Research Lab. - ATVS Universidad Autónoma de Madrid, SPAIN Loris Nanni, Raffaele
Incorporating Biometric Quality In Multi-Biometrics FUSION QUALITY Julian Fierrez-Aguilar, Javier Ortega-Garcia Biometrics Research Lab. - ATVS Universidad Autónoma de Madrid, SPAIN Loris Nanni, Raffaele
Surgery Simulation and Planning
 Surgery Simulation and Planning S. H. Martin Roth Dr. Rolf M. Koch Daniel Bielser Prof. Dr. Markus Gross Facial surgery project in collaboration with Prof. Dr. Dr. H. Sailer, University Hospital Zurich,
Surgery Simulation and Planning S. H. Martin Roth Dr. Rolf M. Koch Daniel Bielser Prof. Dr. Markus Gross Facial surgery project in collaboration with Prof. Dr. Dr. H. Sailer, University Hospital Zurich,
Time Stamp Detection and Recognition in Video Frames
 Time Stamp Detection and Recognition in Video Frames Nongluk Covavisaruch and Chetsada Saengpanit Department of Computer Engineering, Chulalongkorn University, Bangkok 10330, Thailand E-mail: nongluk.c@chula.ac.th
Time Stamp Detection and Recognition in Video Frames Nongluk Covavisaruch and Chetsada Saengpanit Department of Computer Engineering, Chulalongkorn University, Bangkok 10330, Thailand E-mail: nongluk.c@chula.ac.th
Face Detection and Recognition in an Image Sequence using Eigenedginess
 Face Detection and Recognition in an Image Sequence using Eigenedginess B S Venkatesh, S Palanivel and B Yegnanarayana Department of Computer Science and Engineering. Indian Institute of Technology, Madras
Face Detection and Recognition in an Image Sequence using Eigenedginess B S Venkatesh, S Palanivel and B Yegnanarayana Department of Computer Science and Engineering. Indian Institute of Technology, Madras
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
A New Gabor Phase Difference Pattern for Face and Ear Recognition
 A New Gabor Phase Difference Pattern for Face and Ear Recognition Yimo Guo 1,, Guoying Zhao 1, Jie Chen 1, Matti Pietikäinen 1 and Zhengguang Xu 1 Machine Vision Group, Department of Electrical and Information
A New Gabor Phase Difference Pattern for Face and Ear Recognition Yimo Guo 1,, Guoying Zhao 1, Jie Chen 1, Matti Pietikäinen 1 and Zhengguang Xu 1 Machine Vision Group, Department of Electrical and Information
Edge Detection and Template Matching Approaches for Human Ear Detection
 Edge and Template Matching Approaches for Human Ear K. V. Joshi G H Patel College Engineering and Technology vallabh vidyanagar, Gujarat, India N. C. Chauhan A D Patel Institute Technology New vallabh
Edge and Template Matching Approaches for Human Ear K. V. Joshi G H Patel College Engineering and Technology vallabh vidyanagar, Gujarat, India N. C. Chauhan A D Patel Institute Technology New vallabh
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Shape and Texture Based Countermeasure to Protect Face Recognition Systems Against Mask Attacks
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Shape and Texture Based Countermeasure to Protect Face Recognition Systems Against Mask Attacks Neslihan Kose and Jean-Luc Dugelay
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Shape and Texture Based Countermeasure to Protect Face Recognition Systems Against Mask Attacks Neslihan Kose and Jean-Luc Dugelay
Fabric Defect Detection Based on Computer Vision
 Fabric Defect Detection Based on Computer Vision Jing Sun and Zhiyu Zhou College of Information and Electronics, Zhejiang Sci-Tech University, Hangzhou, China {jings531,zhouzhiyu1993}@163.com Abstract.
Fabric Defect Detection Based on Computer Vision Jing Sun and Zhiyu Zhou College of Information and Electronics, Zhejiang Sci-Tech University, Hangzhou, China {jings531,zhouzhiyu1993}@163.com Abstract.
Color Local Texture Features Based Face Recognition
 Color Local Texture Features Based Face Recognition Priyanka V. Bankar Department of Electronics and Communication Engineering SKN Sinhgad College of Engineering, Korti, Pandharpur, Maharashtra, India
Color Local Texture Features Based Face Recognition Priyanka V. Bankar Department of Electronics and Communication Engineering SKN Sinhgad College of Engineering, Korti, Pandharpur, Maharashtra, India
One category of visual tracking. Computer Science SURJ. Michael Fischer
 Computer Science Visual tracking is used in a wide range of applications such as robotics, industrial auto-control systems, traffic monitoring, and manufacturing. This paper describes a new algorithm for
Computer Science Visual tracking is used in a wide range of applications such as robotics, industrial auto-control systems, traffic monitoring, and manufacturing. This paper describes a new algorithm for
Integrating Range and Texture Information for 3D Face Recognition
 Integrating Range and Texture Information for 3D Face Recognition Xiaoguang Lu and Anil K. Jain Dept. of Computer Science & Engineering Michigan State University East Lansing, MI 48824 {Lvxiaogu, jain}@cse.msu.edu
Integrating Range and Texture Information for 3D Face Recognition Xiaoguang Lu and Anil K. Jain Dept. of Computer Science & Engineering Michigan State University East Lansing, MI 48824 {Lvxiaogu, jain}@cse.msu.edu
Triangular Mesh Segmentation Based On Surface Normal
 ACCV2002: The 5th Asian Conference on Computer Vision, 23--25 January 2002, Melbourne, Australia. Triangular Mesh Segmentation Based On Surface Normal Dong Hwan Kim School of Electrical Eng. Seoul Nat
ACCV2002: The 5th Asian Conference on Computer Vision, 23--25 January 2002, Melbourne, Australia. Triangular Mesh Segmentation Based On Surface Normal Dong Hwan Kim School of Electrical Eng. Seoul Nat
Component-based Face Recognition with 3D Morphable Models
 Component-based Face Recognition with 3D Morphable Models Jennifer Huang 1, Bernd Heisele 1,2, and Volker Blanz 3 1 Center for Biological and Computational Learning, M.I.T., Cambridge, MA, USA 2 Honda
Component-based Face Recognition with 3D Morphable Models Jennifer Huang 1, Bernd Heisele 1,2, and Volker Blanz 3 1 Center for Biological and Computational Learning, M.I.T., Cambridge, MA, USA 2 Honda
Locating 1-D Bar Codes in DCT-Domain
 Edith Cowan University Research Online ECU Publications Pre. 2011 2006 Locating 1-D Bar Codes in DCT-Domain Alexander Tropf Edith Cowan University Douglas Chai Edith Cowan University 10.1109/ICASSP.2006.1660449
Edith Cowan University Research Online ECU Publications Pre. 2011 2006 Locating 1-D Bar Codes in DCT-Domain Alexander Tropf Edith Cowan University Douglas Chai Edith Cowan University 10.1109/ICASSP.2006.1660449
AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor
 AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor Takafumi Taketomi, Tomokazu Sato, and Naokazu Yokoya Graduate School of Information
AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor Takafumi Taketomi, Tomokazu Sato, and Naokazu Yokoya Graduate School of Information
MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION
 MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION Panca Mudjirahardjo, Rahmadwati, Nanang Sulistiyanto and R. Arief Setyawan Department of Electrical Engineering, Faculty of
MULTI ORIENTATION PERFORMANCE OF FEATURE EXTRACTION FOR HUMAN HEAD RECOGNITION Panca Mudjirahardjo, Rahmadwati, Nanang Sulistiyanto and R. Arief Setyawan Department of Electrical Engineering, Faculty of
AAM Based Facial Feature Tracking with Kinect
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
Real-Time Model-Based Hand Localization for Unsupervised Palmar Image Acquisition
 Real-Time Model-Based Hand Localization for Unsupervised Palmar Image Acquisition Ivan Fratric 1, Slobodan Ribaric 1 1 University of Zagreb, Faculty of Electrical Engineering and Computing, Unska 3, 10000
Real-Time Model-Based Hand Localization for Unsupervised Palmar Image Acquisition Ivan Fratric 1, Slobodan Ribaric 1 1 University of Zagreb, Faculty of Electrical Engineering and Computing, Unska 3, 10000
Component-based Face Recognition with 3D Morphable Models
 Component-based Face Recognition with 3D Morphable Models B. Weyrauch J. Huang benjamin.weyrauch@vitronic.com jenniferhuang@alum.mit.edu Center for Biological and Center for Biological and Computational
Component-based Face Recognition with 3D Morphable Models B. Weyrauch J. Huang benjamin.weyrauch@vitronic.com jenniferhuang@alum.mit.edu Center for Biological and Center for Biological and Computational
Efficient SLAM Scheme Based ICP Matching Algorithm Using Image and Laser Scan Information
 Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 2015) Barcelona, Spain July 13-14, 2015 Paper No. 335 Efficient SLAM Scheme Based ICP Matching Algorithm
Adaptive Skin Color Classifier for Face Outline Models
 Adaptive Skin Color Classifier for Face Outline Models M. Wimmer, B. Radig, M. Beetz Informatik IX, Technische Universität München, Germany Boltzmannstr. 3, 87548 Garching, Germany [wimmerm, radig, beetz]@informatik.tu-muenchen.de
Adaptive Skin Color Classifier for Face Outline Models M. Wimmer, B. Radig, M. Beetz Informatik IX, Technische Universität München, Germany Boltzmannstr. 3, 87548 Garching, Germany [wimmerm, radig, beetz]@informatik.tu-muenchen.de
Detection of a Single Hand Shape in the Foreground of Still Images
 CS229 Project Final Report Detection of a Single Hand Shape in the Foreground of Still Images Toan Tran (dtoan@stanford.edu) 1. Introduction This paper is about an image detection system that can detect
CS229 Project Final Report Detection of a Single Hand Shape in the Foreground of Still Images Toan Tran (dtoan@stanford.edu) 1. Introduction This paper is about an image detection system that can detect
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images
 Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Multimodal Belief Fusion for Face and Ear Biometrics
 Intelligent Information Management, 2009, 1, 166-171 doi:10.4236/iim.2009.13024 Published Online December 2009 (http://www.scirp.org/journal/iim) Multimodal Belief Fusion for Face and Ear Biometrics Dakshina
Intelligent Information Management, 2009, 1, 166-171 doi:10.4236/iim.2009.13024 Published Online December 2009 (http://www.scirp.org/journal/iim) Multimodal Belief Fusion for Face and Ear Biometrics Dakshina
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
A Contactless Palmprint Recognition Algorithm for Mobile Phones
 A Contactless Palmprint Recognition Algorithm for Mobile Phones Shoichiro Aoyama, Koichi Ito and Takafumi Aoki Graduate School of Information Sciences, Tohoku University 6 6 05, Aramaki Aza Aoba, Sendai-shi
A Contactless Palmprint Recognition Algorithm for Mobile Phones Shoichiro Aoyama, Koichi Ito and Takafumi Aoki Graduate School of Information Sciences, Tohoku University 6 6 05, Aramaki Aza Aoba, Sendai-shi
Mingle Face Detection using Adaptive Thresholding and Hybrid Median Filter
 Mingle Face Detection using Adaptive Thresholding and Hybrid Median Filter Amandeep Kaur Department of Computer Science and Engg Guru Nanak Dev University Amritsar, India-143005 ABSTRACT Face detection
Mingle Face Detection using Adaptive Thresholding and Hybrid Median Filter Amandeep Kaur Department of Computer Science and Engg Guru Nanak Dev University Amritsar, India-143005 ABSTRACT Face detection
Transactions on Information and Communications Technologies vol 16, 1996 WIT Press, ISSN
 ransactions on Information and Communications echnologies vol 6, 996 WI Press, www.witpress.com, ISSN 743-357 Obstacle detection using stereo without correspondence L. X. Zhou & W. K. Gu Institute of Information
ransactions on Information and Communications echnologies vol 6, 996 WI Press, www.witpress.com, ISSN 743-357 Obstacle detection using stereo without correspondence L. X. Zhou & W. K. Gu Institute of Information
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
CSIT 691 Independent Project
 CSIT 691 Independent Project A comparison of Mean Average Error (MAE) Based Image Search for Hexagonally and Regularly Structured Pixel Data Student: Sijing LIU Email: sijing@ust.hk Supervisor: Prof. David
CSIT 691 Independent Project A comparison of Mean Average Error (MAE) Based Image Search for Hexagonally and Regularly Structured Pixel Data Student: Sijing LIU Email: sijing@ust.hk Supervisor: Prof. David
Vision-based Frontal Vehicle Detection and Tracking
 Vision-based Frontal and Tracking King Hann LIM, Kah Phooi SENG, Li-Minn ANG and Siew Wen CHIN School of Electrical and Electronic Engineering The University of Nottingham Malaysia campus, Jalan Broga,
Vision-based Frontal and Tracking King Hann LIM, Kah Phooi SENG, Li-Minn ANG and Siew Wen CHIN School of Electrical and Electronic Engineering The University of Nottingham Malaysia campus, Jalan Broga,
A 3D Point Cloud Registration Algorithm based on Feature Points
 International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A 3D Point Cloud Registration Algorithm based on Feature Points Yi Ren 1, 2, a, Fucai Zhou 1, b 1 School
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) A 3D Point Cloud Registration Algorithm based on Feature Points Yi Ren 1, 2, a, Fucai Zhou 1, b 1 School
Vision-Motion Planning with Uncertainty
 Vision-Motion Planning with Uncertainty Jun MIURA Yoshiaki SHIRAI Dept. of Mech. Eng. for Computer-Controlled Machinery, Osaka University, Suita, Osaka 565, Japan jun@ccm.osaka-u.ac.jp Abstract This paper
Vision-Motion Planning with Uncertainty Jun MIURA Yoshiaki SHIRAI Dept. of Mech. Eng. for Computer-Controlled Machinery, Osaka University, Suita, Osaka 565, Japan jun@ccm.osaka-u.ac.jp Abstract This paper
Finger Print Analysis and Matching Daniel Novák
 Finger Print Analysis and Matching Daniel Novák 1.11, 2016, Prague Acknowledgments: Chris Miles,Tamer Uz, Andrzej Drygajlo Handbook of Fingerprint Recognition, Chapter III Sections 1-6 Outline - Introduction
Finger Print Analysis and Matching Daniel Novák 1.11, 2016, Prague Acknowledgments: Chris Miles,Tamer Uz, Andrzej Drygajlo Handbook of Fingerprint Recognition, Chapter III Sections 1-6 Outline - Introduction
Registration of Moving Surfaces by Means of One-Shot Laser Projection
 Registration of Moving Surfaces by Means of One-Shot Laser Projection Carles Matabosch 1,DavidFofi 2, Joaquim Salvi 1, and Josep Forest 1 1 University of Girona, Institut d Informatica i Aplicacions, Girona,
Registration of Moving Surfaces by Means of One-Shot Laser Projection Carles Matabosch 1,DavidFofi 2, Joaquim Salvi 1, and Josep Forest 1 1 University of Girona, Institut d Informatica i Aplicacions, Girona,