Surgery Simulation and Planning
|
|
|
- Jasmine Merritt
- 5 years ago
- Views:
Transcription

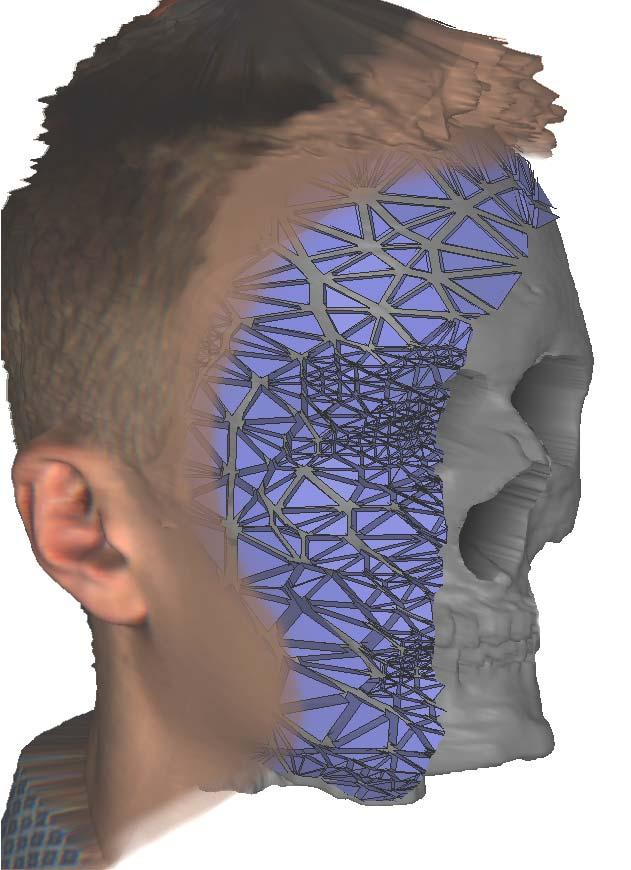
1 Surgery Simulation and Planning S. H. Martin Roth Dr. Rolf M. Koch Daniel Bielser Prof. Dr. Markus Gross Facial surgery project in collaboration with Prof. Dr. Dr. H. Sailer, University Hospital Zurich, currently at Sailer Clinic, Zurich
2 Overview Surgery Planning Cranio maxillofacial surgery Physics based tissue representation Emphasis on accuracy Surgery Simulation Surgical training Physics based tissue representation Emphasis on real time processing Arbitrary topology Haptics S. H. Martin Roth 2



3 Introduction & Motivation Simulation of cranio-maxillofacial surgical procedures 3-d Physically based tissue model Adapted to individual anatomy S. H. Martin Roth 3




4 Introduction & Motivation Conventional planning Computerassisted planning S. H. Martin Roth 4
5 Simulator Goals Evaluation of Mathematical model Custom-built finite element implementation Different finite elements Post-simulate actual surgery Compare simulation and real outcome Automatic registration Automatic determination of jaw movements S. H. Martin Roth 5


6 Prerequisites Volume data (CT) Pre-surgical Post-surgical Surface data (LR) Pre-surgical Post-surgical S. H. Martin Roth 6
7 Linear Elasticity & FEM Tissue as an elastic body Linear stress-strain relation τ = Cε Pure displacement based formulation Mixed formulation Pressure as an additional variable (Near) incompressible situations S. H. Martin Roth 7

 S. H.")
8 Two Kinds of Elements Prism-shaped Hermite elements C 1 continuous surface C 0 continuous inside Displacements Derivative in u Derivative in v Pressure Tetrahedral Bézier elements C 0 linear, quadratic, and cubic C 1 cubic (Clough-Tocher split) S. H. Martin Roth 8




9 Model Build up read data pre-surgical LR pre-surgical CT mesh reduction marching cubes reduced LR CT isosurface mesh reduction reduced iso ICP registration skull extraction facial surface skull surface meshing FE mesh S. H. Martin Roth 9
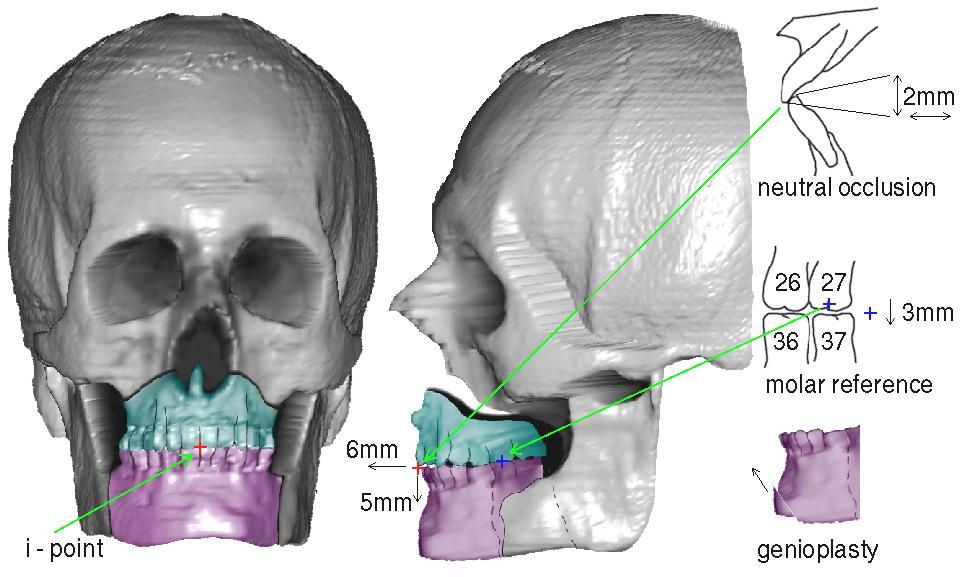
10 Jaw Cutting & Displacement pre-surgical CT read data post-surgical CT CT registration registered post. CT pre-surgical skull surface cutting surface cutting upper jaw lower jaw ICP registration ICP registration displacements S. H. Martin Roth 10
11 Iterative Closest Points Besl & McKay 1992, Horn 1987 Registration used for Model build up Computation of displacement fields Objective Align two surfaces into a common coordinate frame Keep rotation orthonormal Find optimal solution in a least squares sense Problems Surfaces are not identical Outliers S. H. Martin Roth 11
12 ICP Objective Function Notation Surfaces Registration vector Objective function to minimize i= 1 R ( p ) q Refer coordinates to centroids y i = y i n f ( q) = n i= 1 y n 1 µ, µ = y Y Y {, i =1 m} X = xi.. i i q o R p i i = o q = [ q R q T ] p i T Y = yi, i =1.. n P = pi.. 2 n 1 µ, µ = p P { } {, i =1 n} P n i= 1 i S. H. Martin Roth 12
13 ICP Optimal Transformation Optimal translation f (q) minimal for Optimal rotation Equal scaling Centroid coordinates coincide f (q) minimal for maximal Represent rotation with unit quaternions Maximize qt = µ Y R o q (µ P ) o o Eigenvector to max. eigenvalue of N q = e 1 R n i= 1 o y i o q R o p i o R q n i= 1 y i R o T R q R q o R (p ) o Nq R i S. H. Martin Roth 13
14 ICP Algorithm Absolute translation and rotation We need corresponding point sets Iterative Closest Points: Find closest points Y of P (data) on X (model) Compute optimal translation and rotation Transform P Compute total distance d If d below threshold end, else iterate Search for closest points is expensive Spatial data structure needed S. H. Martin Roth 14


15 ICP Results Registration of LR scan to CT isosurface Region of interest Registration mask Initial registration Cross section Resulting registration S. H. Martin Roth 15

16 Image Registration Thévenaz, Ruttimann, Unser, Automatic subpixel registration algorithm Minimization Intensity difference by transformation Modified Levenberg Marquardt nonlinear leastsquare optimization 2-d and 3-d Transformation Affine or rigid-body Optional adjustment of image contrast Multiresolution spline representation S. H. Martin Roth 16



17 Image Registration Results 2-d image registration 3-d CT registration S. H. Martin Roth 17
18 Jaw Displacement Fields Jaw cutting Paint cut lines Jaw alignment Manual rough alignment Surface registration Cut geometry S. H. Martin Roth 18




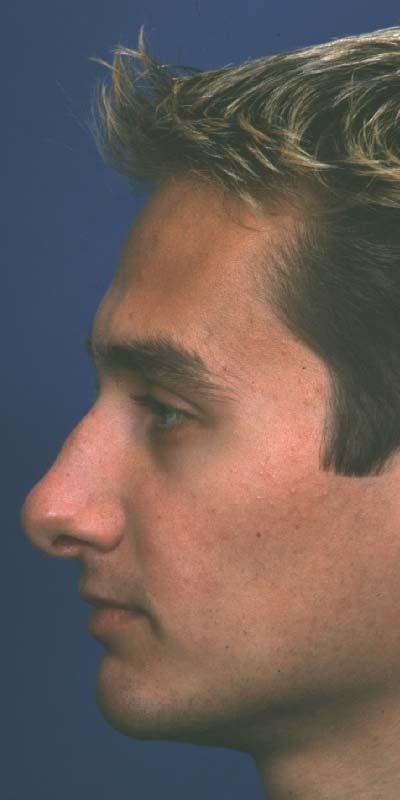
19 Results Evaluation procedure Register post-surgical LR scan to pre-surgical situation Profile lines Error maps pre-surgical simulation post-surgical S. H. Martin Roth 19
20 Results C 0 Linear Profile lines pre-surgical simulation post-surgical tetrahedral elements x matrix (0.490%) displacement dofs 51 conjugent gradient iterations 1.3 seconds assembly 3.4 seconds solving S. H. Martin Roth 20
 S. H.")
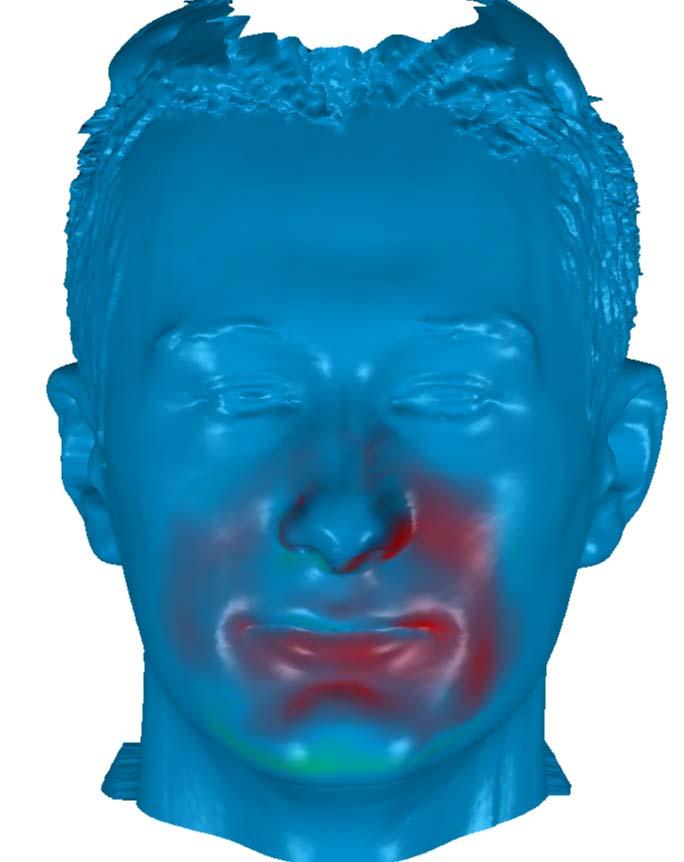
21 Results C 0 Linear Error maps pre-surgical simulation post-surgical % mean square error (with respect to bounding box) S. H. Martin Roth 21
 14 033 displacement dofs 942 conjugent gradient iterations 4 seconds assembly 9 minutes 12 seconds solving S. H.")
22 Results C 0 Quadratic Profile lines pre-surgical simulation post-surgical tetrahedral elements x matrix (0.143%) displacement dofs 942 conjugent gradient iterations 4 seconds assembly 9 minutes 12 seconds solving S. H. Martin Roth 22
23 Results C 0 Quadratic Error maps pre-surgical simulation post-surgical % mean square error (with respect to bounding box) S. H. Martin Roth 23
24 Video Facial Surgery Today & Tomorrow
25 Conclusions & Future Work Conclusion Less emphasis on models More emphasis on simulator design and user interfaces Future work Data acquisition Simulator design User interfaces More complex surgical procedures S. H. Martin Roth 25
26 Goals Surgery Simulation Real time surgery simulation Physics based tissue representation Fast collision detection algorithms Parallel relaxation scheme with adaptive time steps Surgery training Arbitrary topology (cutting) Realistic force feed back Realistic rendering S. H. Martin Roth 26

27 Tissue Model Unstructured tetrahedral meshes Mass spring system for deformation modeling S. H. Martin Roth 27
28 Parallel Tasks in Simulation > 1 khz Collision Detection Haptics Geometry Update TCP/IP > 25 frames/s Rendering Relaxation S. H. Martin Roth 28

29 5 Topologically Different Cases S. H. Martin Roth 29
30 Permitted Face Subdivisions Face subdivision restricted to three cases Only cut edges are subdivided undivided one edge intersected completely split S. H. Martin Roth 30


31 Subdivision Patterns 1 edge cut 2 edges cut 3 edges cut 3 edges cut 4 edges cut partially cut completely split S. H. Martin Roth 31
32 Scheduling Algorithm scheduler node lists t 0 movenodedown t 1 schedulenodelist t 2 movenodeup t n threads insertnewnode S. H. Martin Roth 32


33 Example of an Interactive Cut Cut sequence in a knee model consisting of 1400 tetrahedra Rendered with 3D textures Wireframe representation S. H. Martin Roth 33

34 Example of a Crossing Cut 3000 tetrahedra S. H. Martin Roth 34
35 Conclusions & Future Work Conclusions Accurate and consistent subdivision Efficient and stable parallel relaxation scheme supporting adaptive time steps Hierarchical and local collision detection Realistic haptic model for scalpel forces Future work Visual discontinuities (popping artifacts) More accurate relaxation scheme: Volume preservation (tensor mass system) S. H. Martin Roth 35
36 Visit Us at... S. H. Martin Roth 36
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surgical Cutting on a Multimodal Object Representation
 Surgical Cutting on a Multimodal Object Representation Lenka Jeřábková and Torsten Kuhlen Virtual Reality Group, RWTH Aachen University, 52074 Aachen Email: jerabkova@rz.rwth-aachen.de Abstract. In this
Surgical Cutting on a Multimodal Object Representation Lenka Jeřábková and Torsten Kuhlen Virtual Reality Group, RWTH Aachen University, 52074 Aachen Email: jerabkova@rz.rwth-aachen.de Abstract. In this
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Shape Modeling with Point-Sampled Geometry
 Shape Modeling with Point-Sampled Geometry Mark Pauly Richard Keiser Leif Kobbelt Markus Gross ETH Zürich ETH Zürich RWTH Aachen ETH Zürich Motivation Surface representations Explicit surfaces (B-reps)
Shape Modeling with Point-Sampled Geometry Mark Pauly Richard Keiser Leif Kobbelt Markus Gross ETH Zürich ETH Zürich RWTH Aachen ETH Zürich Motivation Surface representations Explicit surfaces (B-reps)
The Insight Toolkit. Image Registration Algorithms & Frameworks
 The Insight Toolkit Image Registration Algorithms & Frameworks Registration in ITK Image Registration Framework Multi Resolution Registration Framework Components PDE Based Registration FEM Based Registration
The Insight Toolkit Image Registration Algorithms & Frameworks Registration in ITK Image Registration Framework Multi Resolution Registration Framework Components PDE Based Registration FEM Based Registration
Fracture & Tetrahedral Models
 Pop Worksheet! Teams of 2. Hand in to Jeramey after we discuss. What are the horizontal and face velocities after 1, 2, and many iterations of divergence adjustment for an incompressible fluid? Fracture
Pop Worksheet! Teams of 2. Hand in to Jeramey after we discuss. What are the horizontal and face velocities after 1, 2, and many iterations of divergence adjustment for an incompressible fluid? Fracture
Modifying Soft Tissue Models: Progressive Cutting with Minimal New Element Creation
 Modifying Soft Tissue Models: Progressive Cutting with Minimal New Element Creation Andrew B. Mor and Takeo Kanade Center for Medical Robotics and Computer Assisted Surgery Carnegie Mellon University,
Modifying Soft Tissue Models: Progressive Cutting with Minimal New Element Creation Andrew B. Mor and Takeo Kanade Center for Medical Robotics and Computer Assisted Surgery Carnegie Mellon University,
CS 231. Deformation simulation (and faces)
") CS 231 Deformation simulation (and faces) Deformation BODY Simulation Discretization Spring-mass models difficult to model continuum properties Simple & fast to implement and understand Finite Element
CS 231 Deformation simulation (and faces) Deformation BODY Simulation Discretization Spring-mass models difficult to model continuum properties Simple & fast to implement and understand Finite Element
CS 231. Deformation simulation (and faces)
") CS 231 Deformation simulation (and faces) 1 Cloth Simulation deformable surface model Represent cloth model as a triangular or rectangular grid Points of finite mass as vertices Forces or energies of points
CS 231 Deformation simulation (and faces) 1 Cloth Simulation deformable surface model Represent cloth model as a triangular or rectangular grid Points of finite mass as vertices Forces or energies of points
Simulation of Progressive Cutting on Surface Mesh Model
 DRFT6-08Sept02 page 1 Simulation of Progressive utting on Surface Mesh Model Hui Zhang, Shahram Payandeh and John Dill Robotics and omputer Graphics Laboratories, School of Engineering Science Simon Fraser
DRFT6-08Sept02 page 1 Simulation of Progressive utting on Surface Mesh Model Hui Zhang, Shahram Payandeh and John Dill Robotics and omputer Graphics Laboratories, School of Engineering Science Simon Fraser
2 Michael E. Leventon and Sarah F. F. Gibson a b c d Fig. 1. (a, b) Two MR scans of a person's knee. Both images have high resolution in-plane, but ha
 Two MR scans of a person's knee. Both images have high resolution in-plane, but ha") Model Generation from Multiple Volumes using Constrained Elastic SurfaceNets Michael E. Leventon and Sarah F. F. Gibson 1 MIT Artificial Intelligence Laboratory, Cambridge, MA 02139, USA leventon@ai.mit.edu
Model Generation from Multiple Volumes using Constrained Elastic SurfaceNets Michael E. Leventon and Sarah F. F. Gibson 1 MIT Artificial Intelligence Laboratory, Cambridge, MA 02139, USA leventon@ai.mit.edu
Elastic registration of medical images using finite element meshes
 Elastic registration of medical images using finite element meshes Hartwig Grabowski Institute of Real-Time Computer Systems & Robotics, University of Karlsruhe, D-76128 Karlsruhe, Germany. Email: grabow@ira.uka.de
Elastic registration of medical images using finite element meshes Hartwig Grabowski Institute of Real-Time Computer Systems & Robotics, University of Karlsruhe, D-76128 Karlsruhe, Germany. Email: grabow@ira.uka.de
midas NFX 2017R1 Release Note
 Total Solution for True Analysis-driven Design midas NFX 2017R1 Release Note 1 midas NFX R E L E A S E N O T E 2 0 1 7 R 1 Major Improvements Midas NFX is an integrated finite element analysis program
Total Solution for True Analysis-driven Design midas NFX 2017R1 Release Note 1 midas NFX R E L E A S E N O T E 2 0 1 7 R 1 Major Improvements Midas NFX is an integrated finite element analysis program
Homework 1: Implicit Surfaces, Collision Detection, & Volumetric Data Structures. Loop Subdivision. Loop Subdivision. Questions/Comments?
 Homework 1: Questions/Comments? Implicit Surfaces,, & Volumetric Data Structures Loop Subdivision Shirley, Fundamentals of Computer Graphics Loop Subdivision SIGGRAPH 2000 course notes Subdivision for
Homework 1: Questions/Comments? Implicit Surfaces,, & Volumetric Data Structures Loop Subdivision Shirley, Fundamentals of Computer Graphics Loop Subdivision SIGGRAPH 2000 course notes Subdivision for
Geometric Registration for Deformable Shapes 2.2 Deformable Registration
 Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Computer Animation. Algorithms and Techniques. z< MORGAN KAUFMANN PUBLISHERS. Rick Parent Ohio State University AN IMPRINT OF ELSEVIER SCIENCE
 Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Outline. follows the structure of the report
 Outline follows the structure of the report Introduction Mesh-based Modeling of Cuts Finite Element Simulation for Virtual Cutting Numerical Solvers Meshfree Methods Summary & Application Study Discussion
Outline follows the structure of the report Introduction Mesh-based Modeling of Cuts Finite Element Simulation for Virtual Cutting Numerical Solvers Meshfree Methods Summary & Application Study Discussion
Animating cuts with on-the-fly re-meshing
 EUROGRAPHICS 2001 / Jonathan C. Roberts Short Presentations Animating cuts with on-the-fly re-meshing F. Ganovelli and C. O Sullivan Image Synthesis Group, Computer Science Department, Trinity College
EUROGRAPHICS 2001 / Jonathan C. Roberts Short Presentations Animating cuts with on-the-fly re-meshing F. Ganovelli and C. O Sullivan Image Synthesis Group, Computer Science Department, Trinity College
CHARMS: A Simple Framework for Adaptive Simulation SIGGRAPH Presented by Jose Guerra
 CHARMS: A Simple Framework for Adaptive Simulation SIGGRAPH 2002 Eitan Grinspun Caltech Petr Krysl UCSD Peter Schröder Caltech Presented by Jose Guerra 1 Outline Background Motivation (Element vs. Basis
CHARMS: A Simple Framework for Adaptive Simulation SIGGRAPH 2002 Eitan Grinspun Caltech Petr Krysl UCSD Peter Schröder Caltech Presented by Jose Guerra 1 Outline Background Motivation (Element vs. Basis
INTERACTIVE CUTTING OF THE SKULL FOR CRANIOFACIAL SURGICAL PLANNING
 INTERACTIVE CUTTING OF THE SKULL FOR CRANIOFACIAL SURGICAL PLANNING Greg Pintilie *1, Tim McInerney *2,*1 *1 Department of Computer Science, University of Toronto, Canada *2 Department of Math, Physics,
INTERACTIVE CUTTING OF THE SKULL FOR CRANIOFACIAL SURGICAL PLANNING Greg Pintilie *1, Tim McInerney *2,*1 *1 Department of Computer Science, University of Toronto, Canada *2 Department of Math, Physics,
Algorithm research of 3D point cloud registration based on iterative closest point 1
 Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Iso-surface cell search. Iso-surface Cells. Efficient Searching. Efficient search methods. Efficient iso-surface cell search. Problem statement:
 Iso-Contouring Advanced Issues Iso-surface cell search 1. Efficiently determining which cells to examine. 2. Using iso-contouring as a slicing mechanism 3. Iso-contouring in higher dimensions 4. Texturing
Iso-Contouring Advanced Issues Iso-surface cell search 1. Efficiently determining which cells to examine. 2. Using iso-contouring as a slicing mechanism 3. Iso-contouring in higher dimensions 4. Texturing
Meshless Modeling, Animating, and Simulating Point-Based Geometry
 Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
CHAPTER 1. Introduction
 ME 475: Computer-Aided Design of Structures 1-1 CHAPTER 1 Introduction 1.1 Analysis versus Design 1.2 Basic Steps in Analysis 1.3 What is the Finite Element Method? 1.4 Geometrical Representation, Discretization
ME 475: Computer-Aided Design of Structures 1-1 CHAPTER 1 Introduction 1.1 Analysis versus Design 1.2 Basic Steps in Analysis 1.3 What is the Finite Element Method? 1.4 Geometrical Representation, Discretization
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS
 GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
Generative Part Structural Analysis Fundamentals
 CATIA V5 Training Foils Generative Part Structural Analysis Fundamentals Version 5 Release 19 September 2008 EDU_CAT_EN_GPF_FI_V5R19 About this course Objectives of the course Upon completion of this course
CATIA V5 Training Foils Generative Part Structural Analysis Fundamentals Version 5 Release 19 September 2008 EDU_CAT_EN_GPF_FI_V5R19 About this course Objectives of the course Upon completion of this course
Simulation of Instrument-Tissue Interactions and System Integration
 Simulation of Instrument-Tissue Interactions and System Integration Cagatay Basdogan, Ph.D. Jet Propulsion Laboratory California Institute of Technology Phantom II Phantom I Topics: A) Collision detection
Simulation of Instrument-Tissue Interactions and System Integration Cagatay Basdogan, Ph.D. Jet Propulsion Laboratory California Institute of Technology Phantom II Phantom I Topics: A) Collision detection
SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Michael Hofer a
 SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Michael Hofer a a Institute of Geometry, Vienna University of Technology, Wiedner Hauptstr. 8 10, A
SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Michael Hofer a a Institute of Geometry, Vienna University of Technology, Wiedner Hauptstr. 8 10, A
A Haptic VR Milling Surgery Simulator Using High-Resolution CT-Data.
 A Haptic VR Milling Surgery Simulator Using High-Resolution CT-Data. Magnus ERIKSSON a, Mark DIXON b and Jan WIKANDER a. a The Mechatronics Lab/Machine Design, KTH, Stockholm, Sweden b SenseGraphics AB,
A Haptic VR Milling Surgery Simulator Using High-Resolution CT-Data. Magnus ERIKSSON a, Mark DIXON b and Jan WIKANDER a. a The Mechatronics Lab/Machine Design, KTH, Stockholm, Sweden b SenseGraphics AB,
Scanning Real World Objects without Worries 3D Reconstruction
 Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Modern Medical Image Analysis 8DC00 Exam
 Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Automatic registration of terrestrial laser scans for geological deformation monitoring
 Automatic registration of terrestrial laser scans for geological deformation monitoring Daniel Wujanz 1, Michael Avian 2, Daniel Krueger 1, Frank Neitzel 1 1 Chair of Geodesy and Adjustment Theory, Technische
Automatic registration of terrestrial laser scans for geological deformation monitoring Daniel Wujanz 1, Michael Avian 2, Daniel Krueger 1, Frank Neitzel 1 1 Chair of Geodesy and Adjustment Theory, Technische
Simulation in Computer Graphics Space Subdivision. Matthias Teschner
 Simulation in Computer Graphics Space Subdivision Matthias Teschner Outline Introduction Uniform grid Octree and k-d tree BSP tree University of Freiburg Computer Science Department 2 Model Partitioning
Simulation in Computer Graphics Space Subdivision Matthias Teschner Outline Introduction Uniform grid Octree and k-d tree BSP tree University of Freiburg Computer Science Department 2 Model Partitioning
Reconstruction of complete 3D object model from multi-view range images.
 Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Outline. Reconstruction of 3D Meshes from Point Clouds. Motivation. Problem Statement. Applications. Challenges
 Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Computer Graphics Curves and Surfaces. Matthias Teschner
 Computer Graphics Curves and Surfaces Matthias Teschner Outline Introduction Polynomial curves Bézier curves Matrix notation Curve subdivision Differential curve properties Piecewise polynomial curves
Computer Graphics Curves and Surfaces Matthias Teschner Outline Introduction Polynomial curves Bézier curves Matrix notation Curve subdivision Differential curve properties Piecewise polynomial curves
First Order Analysis for Automotive Body Structure Design Using Excel
 Special Issue First Order Analysis 1 Research Report First Order Analysis for Automotive Body Structure Design Using Excel Hidekazu Nishigaki CAE numerically estimates the performance of automobiles and
Special Issue First Order Analysis 1 Research Report First Order Analysis for Automotive Body Structure Design Using Excel Hidekazu Nishigaki CAE numerically estimates the performance of automobiles and
Flexible multibody systems - Relative coordinates approach
 Computer-aided analysis of multibody dynamics (part 2) Flexible multibody systems - Relative coordinates approach Paul Fisette (paul.fisette@uclouvain.be) Introduction In terms of modeling, multibody scientists
Computer-aided analysis of multibody dynamics (part 2) Flexible multibody systems - Relative coordinates approach Paul Fisette (paul.fisette@uclouvain.be) Introduction In terms of modeling, multibody scientists
DESIGN AND ANALYSIS OF MEMBRANE STRUCTURES IN FEM-BASED SOFTWARE MASTER THESIS
 DESIGN AND ANALYSIS OF MEMBRANE STRUCTURES IN FEM-BASED SOFTWARE MASTER THESIS ARCHINEER INSTITUTES FOR MEMBRANE AND SHELL TECHNOLOGIES, BUILDING AND REAL ESTATE e.v. ANHALT UNIVERSITY OF APPLIED SCIENCES
DESIGN AND ANALYSIS OF MEMBRANE STRUCTURES IN FEM-BASED SOFTWARE MASTER THESIS ARCHINEER INSTITUTES FOR MEMBRANE AND SHELL TECHNOLOGIES, BUILDING AND REAL ESTATE e.v. ANHALT UNIVERSITY OF APPLIED SCIENCES
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Finite Element Simulation of Moving Targets in Radio Therapy
 Finite Element Simulation of Moving Targets in Radio Therapy Pan Li, Gregor Remmert, Jürgen Biederer, Rolf Bendl Medical Physics, German Cancer Research Center, 69120 Heidelberg Email: pan.li@dkfz.de Abstract.
Finite Element Simulation of Moving Targets in Radio Therapy Pan Li, Gregor Remmert, Jürgen Biederer, Rolf Bendl Medical Physics, German Cancer Research Center, 69120 Heidelberg Email: pan.li@dkfz.de Abstract.
Collision Detection based on Spatial Partitioning
 Simulation in Computer Graphics Collision Detection based on Spatial Partitioning Matthias Teschner Computer Science Department University of Freiburg Outline introduction uniform grid Octree and k-d tree
Simulation in Computer Graphics Collision Detection based on Spatial Partitioning Matthias Teschner Computer Science Department University of Freiburg Outline introduction uniform grid Octree and k-d tree
CS 565 Computer Vision. Nazar Khan PUCIT Lectures 15 and 16: Optic Flow
 CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
Predicting Tumour Location by Modelling the Deformation of the Breast using Nonlinear Elasticity
 Predicting Tumour Location by Modelling the Deformation of the Breast using Nonlinear Elasticity November 8th, 2006 Outline Motivation Motivation Motivation for Modelling Breast Deformation Mesh Generation
Predicting Tumour Location by Modelling the Deformation of the Breast using Nonlinear Elasticity November 8th, 2006 Outline Motivation Motivation Motivation for Modelling Breast Deformation Mesh Generation
Revised Sheet Metal Simulation, J.E. Akin, Rice University
 Revised Sheet Metal Simulation, J.E. Akin, Rice University A SolidWorks simulation tutorial is just intended to illustrate where to find various icons that you would need in a real engineering analysis.
Revised Sheet Metal Simulation, J.E. Akin, Rice University A SolidWorks simulation tutorial is just intended to illustrate where to find various icons that you would need in a real engineering analysis.
Computer Graphics I Lecture 11
 15-462 Computer Graphics I Lecture 11 Midterm Review Assignment 3 Movie Midterm Review Midterm Preview February 26, 2002 Frank Pfenning Carnegie Mellon University http://www.cs.cmu.edu/~fp/courses/graphics/
15-462 Computer Graphics I Lecture 11 Midterm Review Assignment 3 Movie Midterm Review Midterm Preview February 26, 2002 Frank Pfenning Carnegie Mellon University http://www.cs.cmu.edu/~fp/courses/graphics/
3D Modeling techniques
 3D Modeling techniques 0. Reconstruction From real data (not covered) 1. Procedural modeling Automatic modeling of a self-similar objects or scenes 2. Interactive modeling Provide tools to computer artists
3D Modeling techniques 0. Reconstruction From real data (not covered) 1. Procedural modeling Automatic modeling of a self-similar objects or scenes 2. Interactive modeling Provide tools to computer artists
Motivation. Freeform Shape Representations for Efficient Geometry Processing. Operations on Geometric Objects. Functional Representations
 Motivation Freeform Shape Representations for Efficient Geometry Processing Eurographics 23 Granada, Spain Geometry Processing (points, wireframes, patches, volumes) Efficient algorithms always have to
Motivation Freeform Shape Representations for Efficient Geometry Processing Eurographics 23 Granada, Spain Geometry Processing (points, wireframes, patches, volumes) Efficient algorithms always have to
Contents. I The Basic Framework for Stationary Problems 1
 page v Preface xiii I The Basic Framework for Stationary Problems 1 1 Some model PDEs 3 1.1 Laplace s equation; elliptic BVPs... 3 1.1.1 Physical experiments modeled by Laplace s equation... 5 1.2 Other
page v Preface xiii I The Basic Framework for Stationary Problems 1 1 Some model PDEs 3 1.1 Laplace s equation; elliptic BVPs... 3 1.1.1 Physical experiments modeled by Laplace s equation... 5 1.2 Other
Revision of the SolidWorks Variable Pressure Simulation Tutorial J.E. Akin, Rice University, Mechanical Engineering. Introduction
 Revision of the SolidWorks Variable Pressure Simulation Tutorial J.E. Akin, Rice University, Mechanical Engineering Introduction A SolidWorks simulation tutorial is just intended to illustrate where to
Revision of the SolidWorks Variable Pressure Simulation Tutorial J.E. Akin, Rice University, Mechanical Engineering Introduction A SolidWorks simulation tutorial is just intended to illustrate where to
Chapter 1 Introduction
 Chapter 1 Introduction GTU Paper Analysis (New Syllabus) Sr. No. Questions 26/10/16 11/05/16 09/05/16 08/12/15 Theory 1. What is graphic standard? Explain different CAD standards. 2. Write Bresenham s
Chapter 1 Introduction GTU Paper Analysis (New Syllabus) Sr. No. Questions 26/10/16 11/05/16 09/05/16 08/12/15 Theory 1. What is graphic standard? Explain different CAD standards. 2. Write Bresenham s
2.11 Particle Systems
 2.11 Particle Systems 320491: Advanced Graphics - Chapter 2 152 Particle Systems Lagrangian method not mesh-based set of particles to model time-dependent phenomena such as snow fire smoke 320491: Advanced
2.11 Particle Systems 320491: Advanced Graphics - Chapter 2 152 Particle Systems Lagrangian method not mesh-based set of particles to model time-dependent phenomena such as snow fire smoke 320491: Advanced
Finite element algorithm with adaptive quadtree-octree mesh refinement
 ANZIAM J. 46 (E) ppc15 C28, 2005 C15 Finite element algorithm with adaptive quadtree-octree mesh refinement G. P. Nikishkov (Received 18 October 2004; revised 24 January 2005) Abstract Certain difficulties
ANZIAM J. 46 (E) ppc15 C28, 2005 C15 Finite element algorithm with adaptive quadtree-octree mesh refinement G. P. Nikishkov (Received 18 October 2004; revised 24 January 2005) Abstract Certain difficulties
Transparent, Sensation- Preserving Haptic Rendering
 Transparent, Sensation- Preserving Haptic Rendering Miguel A. Otaduy http://graphics.ethz.ch/~otmiguel IEEE Virtual Reality Conference 2007 Tutorial 3: Integration of Haptics in Virtual Environments A
Transparent, Sensation- Preserving Haptic Rendering Miguel A. Otaduy http://graphics.ethz.ch/~otmiguel IEEE Virtual Reality Conference 2007 Tutorial 3: Integration of Haptics in Virtual Environments A
Medical Image Analysis Active Shape Models
 Medical Image Analysis Active Shape Models Mauricio Reyes, Ph.D. mauricio.reyes@istb.unibe.ch ISTB - Institute for Surgical Technology and Biomechanics University of Bern Lecture Overview! Statistical
Medical Image Analysis Active Shape Models Mauricio Reyes, Ph.D. mauricio.reyes@istb.unibe.ch ISTB - Institute for Surgical Technology and Biomechanics University of Bern Lecture Overview! Statistical
Modeling the Virtual World
 Modeling the Virtual World Joaquim Madeira November, 2013 RVA - 2013/2014 1 A VR system architecture Modeling the Virtual World Geometry Physics Haptics VR Toolkits RVA - 2013/2014 2 VR object modeling
Modeling the Virtual World Joaquim Madeira November, 2013 RVA - 2013/2014 1 A VR system architecture Modeling the Virtual World Geometry Physics Haptics VR Toolkits RVA - 2013/2014 2 VR object modeling
Guidelines for proper use of Plate elements
 Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Non-Linear Finite Element Methods in Solid Mechanics Attilio Frangi, Politecnico di Milano, February 3, 2017, Lesson 1
 Non-Linear Finite Element Methods in Solid Mechanics Attilio Frangi, attilio.frangi@polimi.it Politecnico di Milano, February 3, 2017, Lesson 1 1 Politecnico di Milano, February 3, 2017, Lesson 1 2 Outline
Non-Linear Finite Element Methods in Solid Mechanics Attilio Frangi, attilio.frangi@polimi.it Politecnico di Milano, February 3, 2017, Lesson 1 1 Politecnico di Milano, February 3, 2017, Lesson 1 2 Outline
coding of various parts showing different features, the possibility of rotation or of hiding covering parts of the object's surface to gain an insight
 Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
1 Introduction Motivation and Aims Functional Imaging Computational Neuroanatomy... 12
 Contents 1 Introduction 10 1.1 Motivation and Aims....... 10 1.1.1 Functional Imaging.... 10 1.1.2 Computational Neuroanatomy... 12 1.2 Overview of Chapters... 14 2 Rigid Body Registration 18 2.1 Introduction.....
Contents 1 Introduction 10 1.1 Motivation and Aims....... 10 1.1.1 Functional Imaging.... 10 1.1.2 Computational Neuroanatomy... 12 1.2 Overview of Chapters... 14 2 Rigid Body Registration 18 2.1 Introduction.....
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
2.7 Cloth Animation. Jacobs University Visualization and Computer Graphics Lab : Advanced Graphics - Chapter 2 123
 2.7 Cloth Animation 320491: Advanced Graphics - Chapter 2 123 Example: Cloth draping Image Michael Kass 320491: Advanced Graphics - Chapter 2 124 Cloth using mass-spring model Network of masses and springs
2.7 Cloth Animation 320491: Advanced Graphics - Chapter 2 123 Example: Cloth draping Image Michael Kass 320491: Advanced Graphics - Chapter 2 124 Cloth using mass-spring model Network of masses and springs
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Volume visualization. Volume visualization. Volume visualization methods. Sources of volume visualization. Sources of volume visualization
 Volume visualization Volume visualization Volumes are special cases of scalar data: regular 3D grids of scalars, typically interpreted as density values. Each data value is assumed to describe a cubic
Volume visualization Volume visualization Volumes are special cases of scalar data: regular 3D grids of scalars, typically interpreted as density values. Each data value is assumed to describe a cubic
Subdivision Surfaces
 Subdivision Surfaces 1 Geometric Modeling Sometimes need more than polygon meshes Smooth surfaces Traditional geometric modeling used NURBS Non uniform rational B-Spline Demo 2 Problems with NURBS A single
Subdivision Surfaces 1 Geometric Modeling Sometimes need more than polygon meshes Smooth surfaces Traditional geometric modeling used NURBS Non uniform rational B-Spline Demo 2 Problems with NURBS A single
Finite Element Method. Chapter 7. Practical considerations in FEM modeling
 Finite Element Method Chapter 7 Practical considerations in FEM modeling Finite Element Modeling General Consideration The following are some of the difficult tasks (or decisions) that face the engineer
Finite Element Method Chapter 7 Practical considerations in FEM modeling Finite Element Modeling General Consideration The following are some of the difficult tasks (or decisions) that face the engineer
Image Registration. Prof. Dr. Lucas Ferrari de Oliveira UFPR Informatics Department
 Image Registration Prof. Dr. Lucas Ferrari de Oliveira UFPR Informatics Department Introduction Visualize objects inside the human body Advances in CS methods to diagnosis, treatment planning and medical
Image Registration Prof. Dr. Lucas Ferrari de Oliveira UFPR Informatics Department Introduction Visualize objects inside the human body Advances in CS methods to diagnosis, treatment planning and medical
Interactive needle insertions in 3D nonlinear material
 Interactive needle insertions in 3D nonlinear material Han-Wen Nienhuys A. Frank van der Stappen institute of information and computing sciences, utrecht university technical report UU-CS-2003-019 www.cs.uu.nl
Interactive needle insertions in 3D nonlinear material Han-Wen Nienhuys A. Frank van der Stappen institute of information and computing sciences, utrecht university technical report UU-CS-2003-019 www.cs.uu.nl
VOLCANIC DEFORMATION MODELLING: NUMERICAL BENCHMARKING WITH COMSOL
 VOLCANIC DEFORMATION MODELLING: NUMERICAL BENCHMARKING WITH COMSOL The following is a description of the model setups and input/output parameters for benchmarking analytical volcanic deformation models
VOLCANIC DEFORMATION MODELLING: NUMERICAL BENCHMARKING WITH COMSOL The following is a description of the model setups and input/output parameters for benchmarking analytical volcanic deformation models
Solid and shell elements
 Solid and shell elements Theodore Sussman, Ph.D. ADINA R&D, Inc, 2016 1 Overview 2D and 3D solid elements Types of elements Effects of element distortions Incompatible modes elements u/p elements for incompressible
Solid and shell elements Theodore Sussman, Ph.D. ADINA R&D, Inc, 2016 1 Overview 2D and 3D solid elements Types of elements Effects of element distortions Incompatible modes elements u/p elements for incompressible
SimWise. 3D Dynamic Motion, and Stress Analysis. integrated with Alibre Design
 SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
Rigid Body Dynamics, Collision Response, & Deformation
 Rigid Body Dynamics, Collision Response, & Deformation Pop Worksheet! Teams of 2. SOMEONE YOU HAVEN T ALREADY WORKED WITH What are the horizontal and face velocities after 1, 2, and many iterations of
Rigid Body Dynamics, Collision Response, & Deformation Pop Worksheet! Teams of 2. SOMEONE YOU HAVEN T ALREADY WORKED WITH What are the horizontal and face velocities after 1, 2, and many iterations of
Pre-Operative Simulation and Post-Operative Validation of Soft-Tissue Deformations for Breast Implantation Planning
 Pre-Operative Simulation and Post-Operative Validation of Soft-Tissue Deformations for Breast Implantation Planning Liesbet Roose a, Wim De Maerteleire b, Wouter Mollemans a, Frederik Maes a, Paul Suetens
Pre-Operative Simulation and Post-Operative Validation of Soft-Tissue Deformations for Breast Implantation Planning Liesbet Roose a, Wim De Maerteleire b, Wouter Mollemans a, Frederik Maes a, Paul Suetens
Registration D.A. Forsyth, UIUC
 Registration D.A. Forsyth, UIUC Registration Place a geometric model in correspondence with an image could be 2D or 3D model up to some transformations possibly up to deformation Applications very important
Registration D.A. Forsyth, UIUC Registration Place a geometric model in correspondence with an image could be 2D or 3D model up to some transformations possibly up to deformation Applications very important
08 - Designing Approximating Curves
 08 - Designing Approximating Curves Acknowledgement: Olga Sorkine-Hornung, Alexander Sorkine-Hornung, Ilya Baran Last time Interpolating curves Monomials Lagrange Hermite Different control types Polynomials
08 - Designing Approximating Curves Acknowledgement: Olga Sorkine-Hornung, Alexander Sorkine-Hornung, Ilya Baran Last time Interpolating curves Monomials Lagrange Hermite Different control types Polynomials
Free-Form Deformation and Other Deformation Techniques
 Free-Form Deformation and Other Deformation Techniques Deformation Deformation Basic Definition Deformation: A transformation/mapping of the positions of every particle in the original object to those
Free-Form Deformation and Other Deformation Techniques Deformation Deformation Basic Definition Deformation: A transformation/mapping of the positions of every particle in the original object to those
GEOMETRIC LIBRARY. Maharavo Randrianarivony
 GEOMETRIC LIBRARY Maharavo Randrianarivony During the last four years, I have maintained a numerical geometric library. The constituting routines, which are summarized in the following list, are implemented
GEOMETRIC LIBRARY Maharavo Randrianarivony During the last four years, I have maintained a numerical geometric library. The constituting routines, which are summarized in the following list, are implemented
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Curves and Surfaces for Computer-Aided Geometric Design
 Curves and Surfaces for Computer-Aided Geometric Design A Practical Guide Fourth Edition Gerald Farin Department of Computer Science Arizona State University Tempe, Arizona /ACADEMIC PRESS I San Diego
Curves and Surfaces for Computer-Aided Geometric Design A Practical Guide Fourth Edition Gerald Farin Department of Computer Science Arizona State University Tempe, Arizona /ACADEMIC PRESS I San Diego
Deformable Distance Fields for Simulation of Non- Penetrating Flexible Bodies
 Deformable Distance Fields for Simulation of Non- Penetrating Flexible Bodies Susan Fisher and Ming C. Lin {sfisher, lin}@cs.unc.edu http://gamma.cs.unc.edu/ddf/ Department of Computer Science University
Deformable Distance Fields for Simulation of Non- Penetrating Flexible Bodies Susan Fisher and Ming C. Lin {sfisher, lin}@cs.unc.edu http://gamma.cs.unc.edu/ddf/ Department of Computer Science University
ASSIGNMENT 1 INTRODUCTION TO CAD
 Computer Aided Design(2161903) ASSIGNMENT 1 INTRODUCTION TO CAD Theory 1. Discuss the reasons for implementing a CAD system. 2. Define computer aided design. Compare computer aided design and conventional
Computer Aided Design(2161903) ASSIGNMENT 1 INTRODUCTION TO CAD Theory 1. Discuss the reasons for implementing a CAD system. 2. Define computer aided design. Compare computer aided design and conventional
Lecture overview. Visualisatie BMT. Fundamental algorithms. Visualization pipeline. Structural classification - 1. Structural classification - 2
 Visualisatie BMT Fundamental algorithms Arjan Kok a.j.f.kok@tue.nl Lecture overview Classification of algorithms Scalar algorithms Vector algorithms Tensor algorithms Modeling algorithms 1 2 Visualization
Visualisatie BMT Fundamental algorithms Arjan Kok a.j.f.kok@tue.nl Lecture overview Classification of algorithms Scalar algorithms Vector algorithms Tensor algorithms Modeling algorithms 1 2 Visualization
A Multiple-Layer Flexible Mesh Template Matching Method for Nonrigid Registration between a Pelvis Model and CT Images
 A Multiple-Layer Flexible Mesh Template Matching Method for Nonrigid Registration between a Pelvis Model and CT Images Jianhua Yao 1, Russell Taylor 2 1. Diagnostic Radiology Department, Clinical Center,
A Multiple-Layer Flexible Mesh Template Matching Method for Nonrigid Registration between a Pelvis Model and CT Images Jianhua Yao 1, Russell Taylor 2 1. Diagnostic Radiology Department, Clinical Center,
Norbert Schuff VA Medical Center and UCSF
 Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY
 13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY Lecture 21 Dr. K. H. Ko Prof. N. M. Patrikalakis Copyright c 2003 Massachusetts Institute of Technology Contents 21 Object Matching 2 21.1 Various matching
13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY Lecture 21 Dr. K. H. Ko Prof. N. M. Patrikalakis Copyright c 2003 Massachusetts Institute of Technology Contents 21 Object Matching 2 21.1 Various matching
CHAPTER 1 Graphics Systems and Models 3
 ?????? 1 CHAPTER 1 Graphics Systems and Models 3 1.1 Applications of Computer Graphics 4 1.1.1 Display of Information............. 4 1.1.2 Design.................... 5 1.1.3 Simulation and Animation...........
?????? 1 CHAPTER 1 Graphics Systems and Models 3 1.1 Applications of Computer Graphics 4 1.1.1 Display of Information............. 4 1.1.2 Design.................... 5 1.1.3 Simulation and Animation...........
NX Advanced FEM. Benefits
 Advanced FEM fact sheet Siemens PLM Software www.siemens.com/plm Summary Advanced FEM software is a comprehensive multi-cad finite element modeling and results visualization product that is designed to
Advanced FEM fact sheet Siemens PLM Software www.siemens.com/plm Summary Advanced FEM software is a comprehensive multi-cad finite element modeling and results visualization product that is designed to
Modeling 3D Objects: Part 2
 Modeling 3D Objects: Part 2 Patches, NURBS, Solids Modeling, Spatial Subdivisioning, and Implicit Functions 3D Computer Graphics by Alan Watt Third Edition, Pearson Education Limited, 2000 General Modeling
Modeling 3D Objects: Part 2 Patches, NURBS, Solids Modeling, Spatial Subdivisioning, and Implicit Functions 3D Computer Graphics by Alan Watt Third Edition, Pearson Education Limited, 2000 General Modeling
Advances in Forensic Anthropology
 Advances in Forensic Anthropology Technology Transition Workshop Improving Forensic Facial Reproduction Using Empirical Modeling During this session, attendees will learn of an approach for forensic facial
Advances in Forensic Anthropology Technology Transition Workshop Improving Forensic Facial Reproduction Using Empirical Modeling During this session, attendees will learn of an approach for forensic facial
Subdivision Surfaces. Homework 1: Questions/Comments?
 Subdivision Surfaces Homework 1: Questions/Comments? 1 Questions on Homework? What s an illegal edge collapse? 1 2 3 a b 4 7 To be legal, the ring of vertex neighbors must be unique (have no duplicates)!
Subdivision Surfaces Homework 1: Questions/Comments? 1 Questions on Homework? What s an illegal edge collapse? 1 2 3 a b 4 7 To be legal, the ring of vertex neighbors must be unique (have no duplicates)!
Volumetric Deformable Models for Simulation of Laparoscopic Surgery
 Volumetric Deformable Models for Simulation of Laparoscopic Surgery S. Cotin y, H. Delingette y, J.M. Clément z V. Tassetti z, J. Marescaux z, N. Ayache y y INRIA, Epidaure Project 2004, route des Lucioles,
Volumetric Deformable Models for Simulation of Laparoscopic Surgery S. Cotin y, H. Delingette y, J.M. Clément z V. Tassetti z, J. Marescaux z, N. Ayache y y INRIA, Epidaure Project 2004, route des Lucioles,
L1 - Introduction. Contents. Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming
 L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
Non-rigid Image Registration
 Overview Non-rigid Image Registration Introduction to image registration - he goal of image registration - Motivation for medical image registration - Classification of image registration - Nonrigid registration
Overview Non-rigid Image Registration Introduction to image registration - he goal of image registration - Motivation for medical image registration - Classification of image registration - Nonrigid registration
NX Advanced FEM. fact sheet
 Advanced FEM fact sheet www.ugs.com Summary Advanced FEM is a comprehensive multi-cad finite element modeling and results visualization product that is designed to meet the needs of experienced CAE analysts.
Advanced FEM fact sheet www.ugs.com Summary Advanced FEM is a comprehensive multi-cad finite element modeling and results visualization product that is designed to meet the needs of experienced CAE analysts.
1.2 Numerical Solutions of Flow Problems
 1.2 Numerical Solutions of Flow Problems DIFFERENTIAL EQUATIONS OF MOTION FOR A SIMPLIFIED FLOW PROBLEM Continuity equation for incompressible flow: 0 Momentum (Navier-Stokes) equations for a Newtonian
1.2 Numerical Solutions of Flow Problems DIFFERENTIAL EQUATIONS OF MOTION FOR A SIMPLIFIED FLOW PROBLEM Continuity equation for incompressible flow: 0 Momentum (Navier-Stokes) equations for a Newtonian
Measuring and Visualizing Geometrical Differences Using a Consumer Grade Range Camera
 Measuring and Visualizing Geometrical Differences Using a Consumer Grade Range Camera Gijs Ramaekers Supervisor: Jonny Gustafsson Abstract Measuring geometrically complex parts is currently very labor
Measuring and Visualizing Geometrical Differences Using a Consumer Grade Range Camera Gijs Ramaekers Supervisor: Jonny Gustafsson Abstract Measuring geometrically complex parts is currently very labor
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
9. Three Dimensional Object Representations
 9. Three Dimensional Object Representations Methods: Polygon and Quadric surfaces: For simple Euclidean objects Spline surfaces and construction: For curved surfaces Procedural methods: Eg. Fractals, Particle
9. Three Dimensional Object Representations Methods: Polygon and Quadric surfaces: For simple Euclidean objects Spline surfaces and construction: For curved surfaces Procedural methods: Eg. Fractals, Particle
Shape modeling Modeling technique Shape representation! 3D Graphics Modeling Techniques
 D Graphics http://chamilo2.grenet.fr/inp/courses/ensimag4mmgd6/ Shape Modeling technique Shape representation! Part : Basic techniques. Projective rendering pipeline 2. Procedural Modeling techniques Shape
D Graphics http://chamilo2.grenet.fr/inp/courses/ensimag4mmgd6/ Shape Modeling technique Shape representation! Part : Basic techniques. Projective rendering pipeline 2. Procedural Modeling techniques Shape