MEAM 520. More Denavit-Hartenberg (DH)
|
|
|
- Buddy Mosley
- 5 years ago
- Views:
Transcription

 MEAM Department, SEAS, University of")
1 MEAM 520 More Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 6: September 25, 2012


2 Slides created by Jonathan Fiene Denavit-Hartenberg Parameters

3 The Denavit-Hartenberg convention defines four parameters and some rules to help characterize arbitrary kinematic chains start by attaching a frame to each link: the joint variable for joint i+1 acts along/around z i the axis x i is perpendicular to, and intersects, z i 1 Denavit & Hartenberg, A kinematic notation for lower-pair mechanisms based on matrices, ASME Journal of Applied Mechanics, June 1955
4 The Denavit-Hartenberg convention defines four parameters and some rules to help characterize arbitrary kinematic chains start by attaching a frame to each link: the joint variable for joint i+1 acts along/around z i the axis x i is perpendicular to, and intersects, z i 1 the following conventions make this process easier (p. 82 in SHV): if z i 1 is parallel to z i orient x i away from z i 1 if z i 1 intersects z i orient x i normal to the plane formed by z i 1 and z i if z i 1 is not coplanar with z i orient x i along normal with z i 1 Denavit & Hartenberg, A kinematic notation for lower-pair mechanisms based on matrices, ASME Journal of Applied Mechanics, June 1955
5 The Denavit-Hartenberg convention defines four parameters and some rules to help characterize arbitrary kinematic chains a i Link Length α i Link Twist the perpendicular distance between z i and z i 1, measured along x i the angle between z i 1 and z i, measured in the plane normal to x i (right-hand rule around x i ) d i Link Offset the distance along z i 1 from o i 1 to the intersection with x i θ i Joint Angle x i 1 x i z i 1 the angle between and, measured in the plane normal to (right-hand rule around z i 1 ) Denavit & Hartenberg, A kinematic notation for lower-pair mechanisms based on matrices, ASME Journal of Applied Mechanics, June 1955
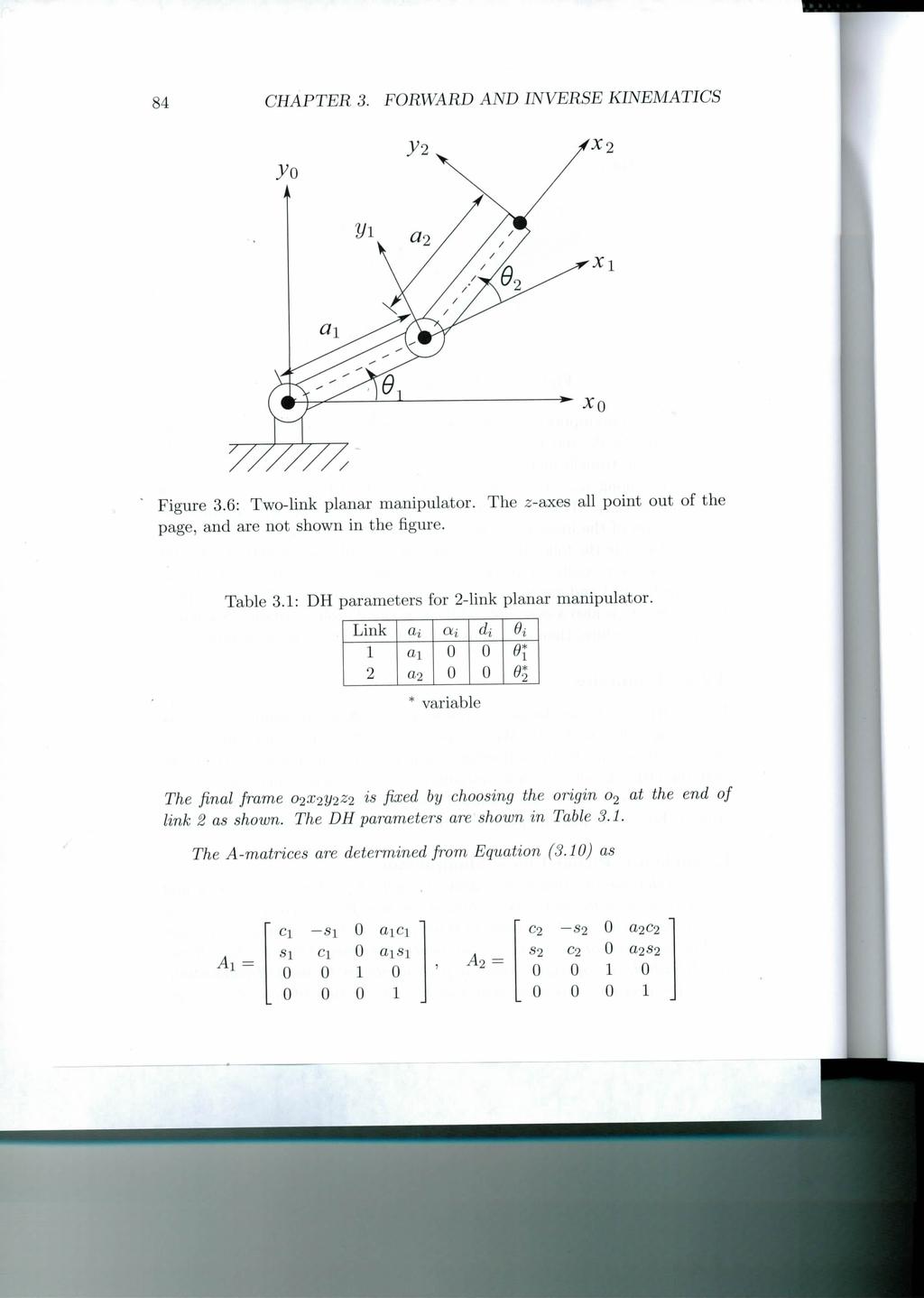
6 Example 1: Planar RR Robot
7
8
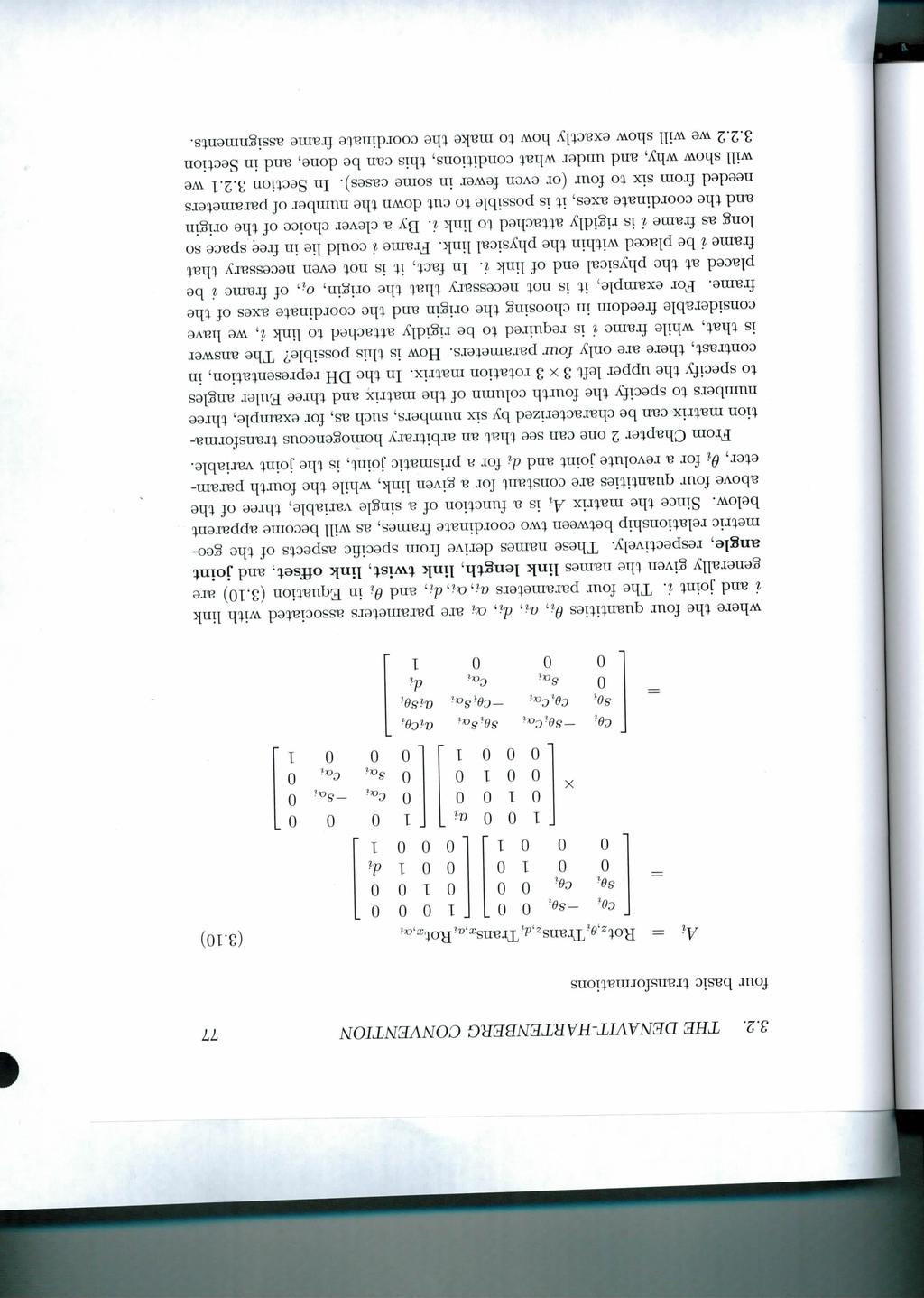
9 The Denavit-Hartenberg transform results from successive rotations and translations via the four DH parameters The transform from i-1 to i: A i =Rot z,θi Trans z,di Trans x,ai Rot x,αi = c θi s θi c αi s θi s αi a i c θi s θi c θi c αi c θi s αi a i s θi 0 s αi c αi d i
10
11
12 Questions?

13 Example 2: The Stanford Manipulator (RRPRRR) for simplicity, turn shoulder 90 up for the zero configuration

14
15
16
17
18 page 91 in SHV
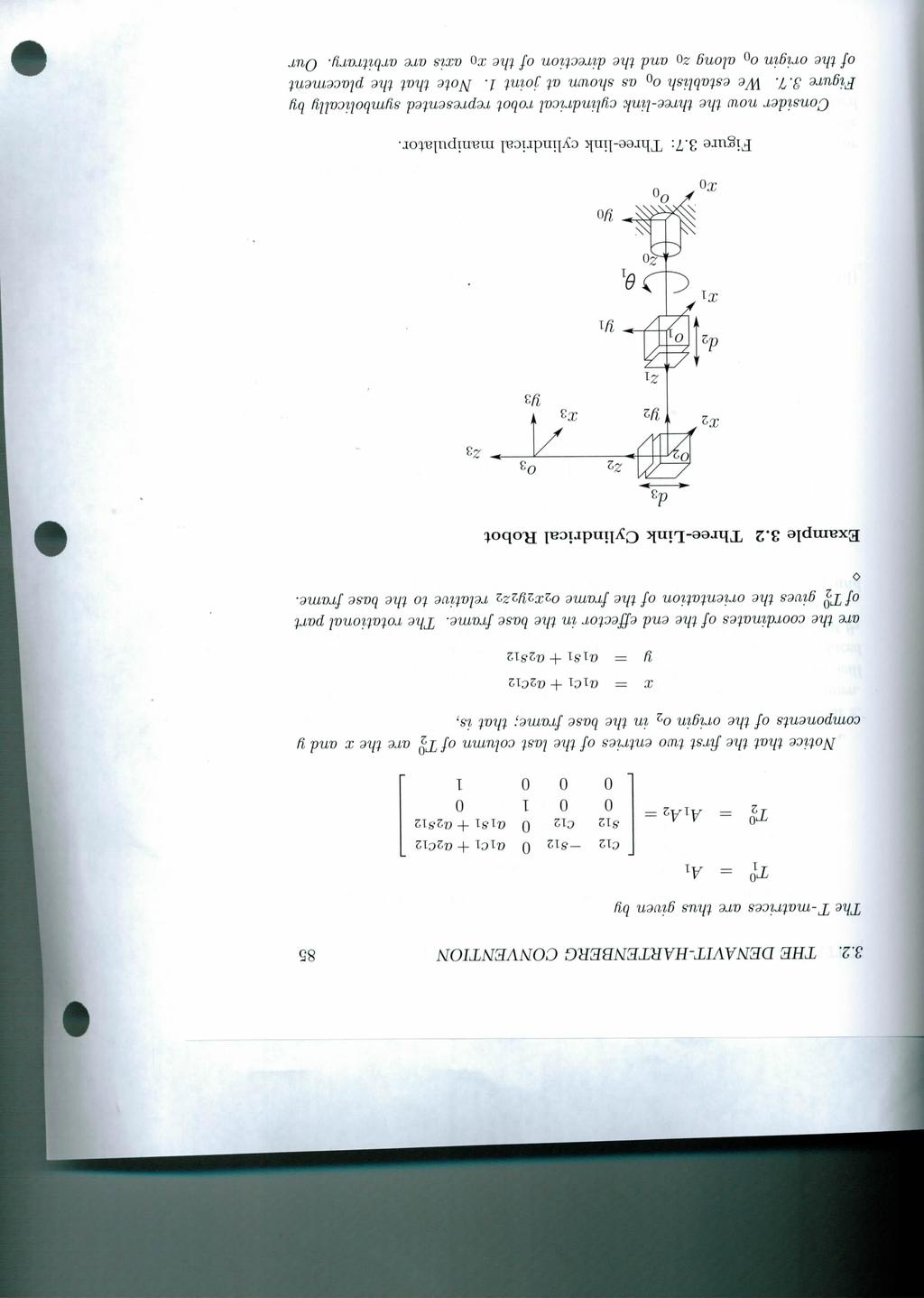
19 More examples in the book: Three-Link Cylindrical Robot Spherical Wrist SCARA Manipulator

20 Note: Spherical wrist in Figure 3.8 is drawn with θ5 = -90
21 Questions?

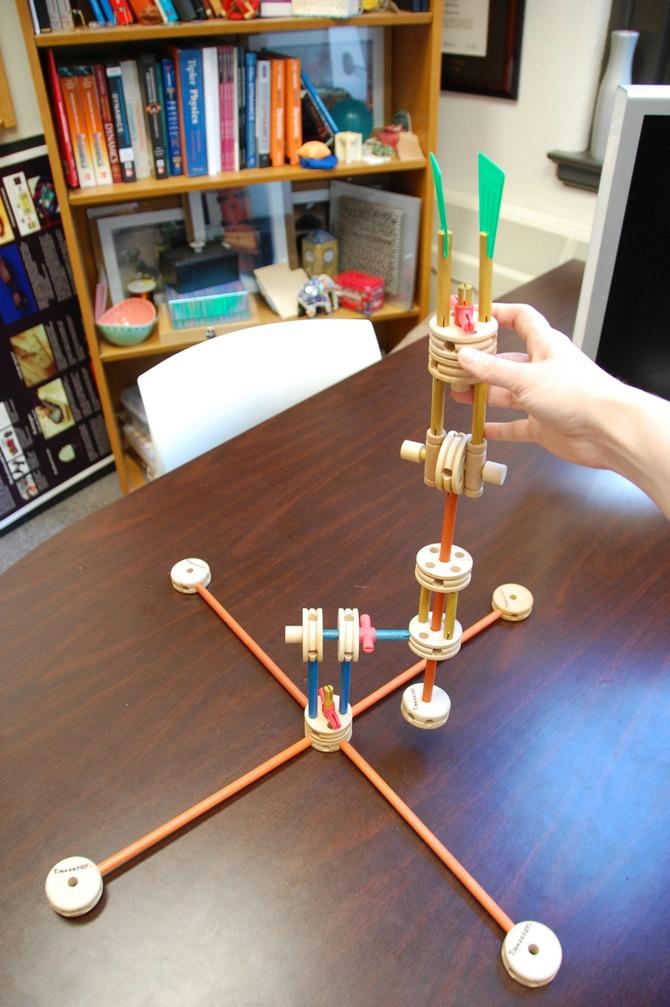
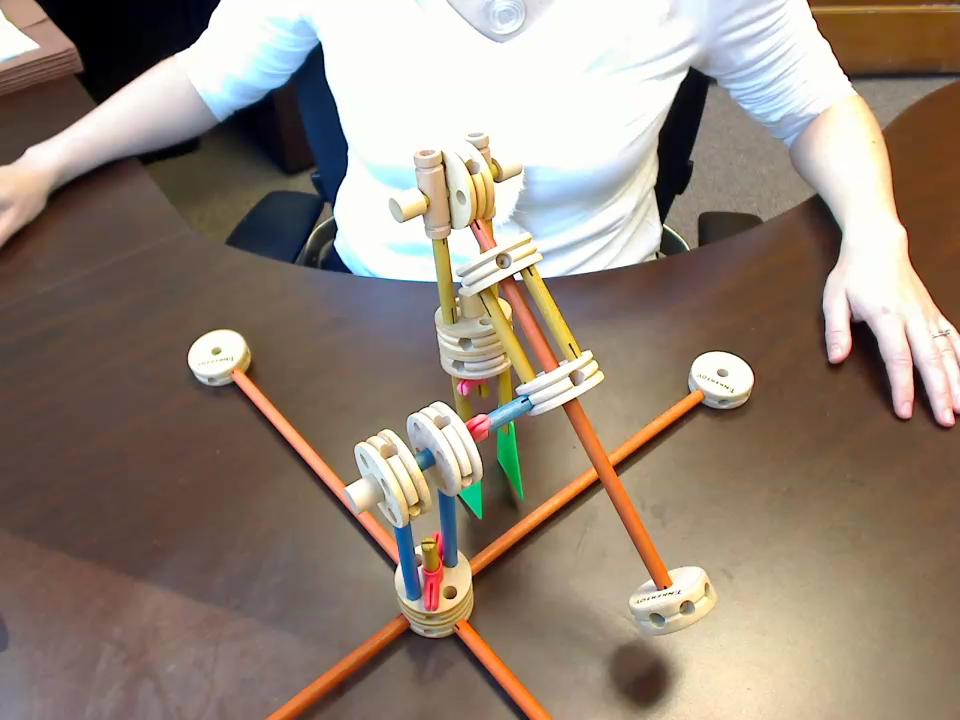
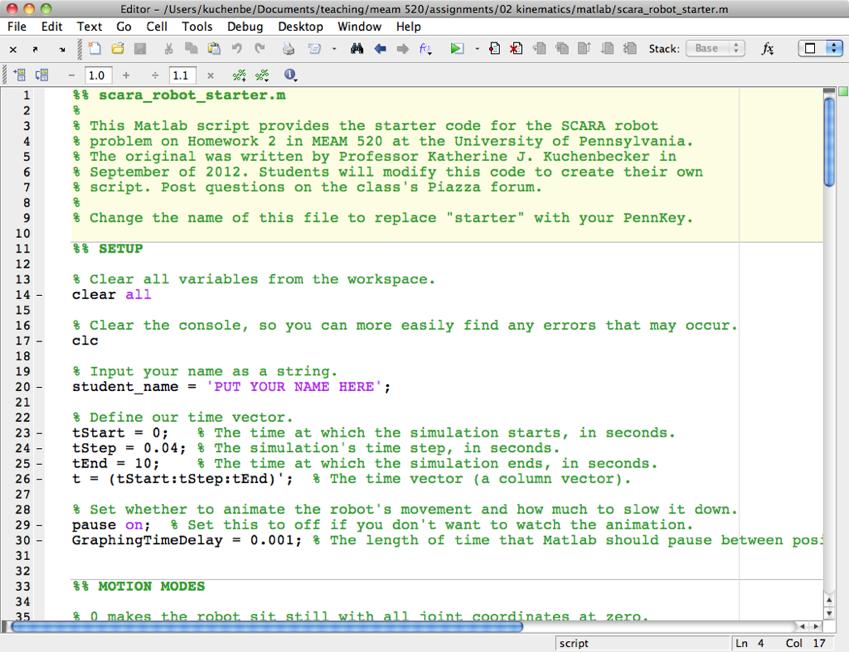
22 Homework 2 due Thursday by 5:00 p.m. Homework 2: Manipulator Kinematics and DH Parameters MEAM 520, University of Pennsylvania Katherine J. Kuchenbecker, Ph.D. September 18, 2012 This assignment is due on Thursday, September 27 (updated), by5:00p.m.sharp.youshouldaim to turn the paper part in during class that day. If you don t finish until later in the day, you can turn it in to Professor Kuchenbecker s office, Towne 224. The code must be edaccordingtotheinstructions at the end of this document. Late submissions of either or both parts will be accepted until 5:00 p.m.on Friday, but they will be penalized by 25%. After that deadline, no further assignments may be submitted. You may talk with other students about this assignment, ask the teaching team questions, use a calculator and other tools, and consult outside sources such as the Internet. To help you actually learn the material, what you write down should be your own work, not copied from a peer or a solution manual. Written Problems (30 points) The first set of problems are written, including two from the textbook, Robot Modeling and Control by Spong, Hutchinson, and Vidyasagar (SHV). Please follow the extra clarifications and instructions when provided. Write in pencil, show your work clearly, box your answers, and staple your pages together. 1. Custom problem Kinematics of Baxter (5 points) Rethink Robotics recently released a new robot named Baxter. WatchYouTubevideosofBaxter(e.g., to learn about its kinematics. Draw a schematic of the serial kinematic chain of Baxter s left arm (the one the womanistouchinginthepictureabove.) Use the book s conventions for how to draw revolute and prismatic joints in 3D. 2. SHV 3-7, page 113 Three-link Cartesian Robot (10 points) Your solution should include a schematic of the manipulator with appropriately placed coordinate frames, a table of the DH parameters, and the final transformation matrix. Then answer the following question: What are the x, y, andz coordinates of the tip of the robot s end-effector in the base frame (as a function of the robot parameters and the joint coordinates)? 1


23 DH Parameters for SCARA Manipulator pages 91-93

24
25
MEAM 520. Denavit-Hartenberg (DH)
") MEAM 520 Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 5: September
MEAM 520 Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 5: September
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
Prof. Mark Yim University of Pennsylvania
 Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions from joint
Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions from joint
EE Kinematics & Inverse Kinematics
 Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Forward kinematics and Denavit Hartenburg convention
 Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
MEAM 520. Manipulator Kinematics
 MEAM 520 Manipulator Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 4: September
MEAM 520 Manipulator Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 4: September
3. Manipulator Kinematics. Division of Electronic Engineering Prof. Jaebyung Park
 3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
Prof. Mark Yim University of Pennsylvania
 Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom Robo1x-1.5 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions
Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom Robo1x-1.5 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer
 Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
ME5286 Robotics Spring 2013 Quiz 1
 Page 1 of 7 ME5286 Robotics Spring 2013 Quiz 1 Total Points: 36 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
Page 1 of 7 ME5286 Robotics Spring 2013 Quiz 1 Total Points: 36 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
The Denavit Hartenberg Convention
 The Denavit Hartenberg Convention Ravi Balasubramanian ravib@cmu.edu Robotics Institute Carnegie Mellon University 1 Why do Denavit Hartenberg (DH)? Last class, Matt did forward kinematics for the simple
The Denavit Hartenberg Convention Ravi Balasubramanian ravib@cmu.edu Robotics Institute Carnegie Mellon University 1 Why do Denavit Hartenberg (DH)? Last class, Matt did forward kinematics for the simple
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Inverse Kinematics of 6 DOF Serial Manipulator. Robotics. Inverse Kinematics of 6 DOF Serial Manipulator
 Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
ME 115(b): Final Exam, Spring
: Final Exam, Spring") ME 115(b): Final Exam, Spring 2011-12 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
ME 115(b): Final Exam, Spring 2011-12 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018)
: Final Exam (Fall Quarter 2017/2018)") ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
Theory of Robotics and Mechatronics
 Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Kinematic Model of Robot Manipulators
 Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
6. Kinematics of Serial Chain Manipulators
 6. Kinematics of Serial Chain Manipulators 6.1 Assignment of reference frames In a multi-degree-of-freedom mechanical system consisting of rigid bodies, it is useful to attach reference frames to each
6. Kinematics of Serial Chain Manipulators 6.1 Assignment of reference frames In a multi-degree-of-freedom mechanical system consisting of rigid bodies, it is useful to attach reference frames to each
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017
 Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software
 Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
MEAM 520. Mobile Robots
 MEAM 520 Mobile Robots Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, Universit of Pennslvania Lecture 22: December 6, 2012 T
MEAM 520 Mobile Robots Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, Universit of Pennslvania Lecture 22: December 6, 2012 T
A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer
 A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer Ambuja Singh Student Saakshi Singh Student, Ratna Priya Kanchan Student, Abstract -Robot kinematics the
A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer Ambuja Singh Student Saakshi Singh Student, Ratna Priya Kanchan Student, Abstract -Robot kinematics the
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
The University of Missouri - Columbia Electrical & Computer Engineering Department EE4330 Robotic Control and Intelligence
 The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
[2] J. "Kinematics," in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.
![[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.](/thumbs/90/102406247.jpg "[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.") 92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
KINEMATIC MODELLING AND ANALYSIS OF 5 DOF ROBOTIC ARM
 International Journal of Robotics Research and Development (IJRRD) ISSN(P): 2250-1592; ISSN(E): 2278 9421 Vol. 4, Issue 2, Apr 2014, 17-24 TJPRC Pvt. Ltd. KINEMATIC MODELLING AND ANALYSIS OF 5 DOF ROBOTIC
International Journal of Robotics Research and Development (IJRRD) ISSN(P): 2250-1592; ISSN(E): 2278 9421 Vol. 4, Issue 2, Apr 2014, 17-24 TJPRC Pvt. Ltd. KINEMATIC MODELLING AND ANALYSIS OF 5 DOF ROBOTIC
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS
 KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
Kinematic Model of Anthropomorphic Robotics Finger Mechanisms
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684 Volume 6, Issue 1 (Mar. - Apr. 2013), PP 66-72 Kinematic Model of Anthropomorphic Robotics Finger Mechanisms Abdul Haseeb
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684 Volume 6, Issue 1 (Mar. - Apr. 2013), PP 66-72 Kinematic Model of Anthropomorphic Robotics Finger Mechanisms Abdul Haseeb
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
MDP646: ROBOTICS ENGINEERING. Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt. Prof. Said M.
 MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
Lecture Note 6: Forward Kinematics
 ECE5463: Introduction to Robotics Lecture Note 6: Forward Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 6 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 6: Forward Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 6 (ECE5463
ME5286 Robotics Spring 2015 Quiz 1
 Page 1 of 7 ME5286 Robotics Spring 2015 Quiz 1 Total Points: 30 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
Page 1 of 7 ME5286 Robotics Spring 2015 Quiz 1 Total Points: 30 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
ECE569 Fall 2015 Solution to Problem Set 2
 ECE569 Fall 2015 Solution to Problem Set 2 These problems are from the textbook by Spong et al. 1, which is the textbook for the ECE580 this Fall 2015 semester. As such, many of the problem statements
ECE569 Fall 2015 Solution to Problem Set 2 These problems are from the textbook by Spong et al. 1, which is the textbook for the ECE580 this Fall 2015 semester. As such, many of the problem statements
Lecture 3.5: Sumary of Inverse Kinematics Solutions
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3.5: Sumary of Inverse Kinematics Solutions Reading: SHV Sect.2.5.1, 3.3 Mechanical Engineering Hanz Richter, PhD MCE647 p.1/13 Inverse Orientation:
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3.5: Sumary of Inverse Kinematics Solutions Reading: SHV Sect.2.5.1, 3.3 Mechanical Engineering Hanz Richter, PhD MCE647 p.1/13 Inverse Orientation:
ME5286 Robotics Spring 2014 Quiz 1 Solution. Total Points: 30
 Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
ECE569 Fall 2015 Partial Solution to Problem Set 3
 ECE569 Fall 215 Partial Solution to Problem Set 3 These problems are from the textbook by Spong et al. 1, which is the textbook for the ECE569 this Fall 215 semester. As such, many of the problem statements
ECE569 Fall 215 Partial Solution to Problem Set 3 These problems are from the textbook by Spong et al. 1, which is the textbook for the ECE569 this Fall 215 semester. As such, many of the problem statements
CSE4421/5324: Introduction to Robotics
 CSE442/5324: Introduction to Robotics Contact Information Burton Ma Lassonde 246 burton@cse.yorku.ca EECS442/5324 lectures Monday, Wednesday, Friday :3-2:3PM (SLH C) Lab Thursday 2:3-2:3, Prism 4 Lab 2
CSE442/5324: Introduction to Robotics Contact Information Burton Ma Lassonde 246 burton@cse.yorku.ca EECS442/5324 lectures Monday, Wednesday, Friday :3-2:3PM (SLH C) Lab Thursday 2:3-2:3, Prism 4 Lab 2
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Robotics I. March 27, 2018
 Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Finding Reachable Workspace of a Robotic Manipulator by Edge Detection Algorithm
 International Journal of Advanced Mechatronics and Robotics (IJAMR) Vol. 3, No. 2, July-December 2011; pp. 43-51; International Science Press, ISSN: 0975-6108 Finding Reachable Workspace of a Robotic Manipulator
International Journal of Advanced Mechatronics and Robotics (IJAMR) Vol. 3, No. 2, July-December 2011; pp. 43-51; International Science Press, ISSN: 0975-6108 Finding Reachable Workspace of a Robotic Manipulator
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Index Terms Denavit-Hartenberg Parameters, Kinematics, Pick and place robotic arm, Taper roller bearings. III. METHODOLOGY
 ISSN: 39-5967 ISO 9:8 Certified Volume 5, Issue 3, May 6 DESIGN OF A PROTOTYPE OF A PICK AND PLACE ROBOTIC ARM Amod Aboti, Sanket Acharya, Abhinav Anand, Rushikesh Chintale, Vipul Ruiwale Abstract In the
ISSN: 39-5967 ISO 9:8 Certified Volume 5, Issue 3, May 6 DESIGN OF A PROTOTYPE OF A PICK AND PLACE ROBOTIC ARM Amod Aboti, Sanket Acharya, Abhinav Anand, Rushikesh Chintale, Vipul Ruiwale Abstract In the
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF4380 Introduction to Robotics Day of exam: 31 th May, 2017 Exam hours: 14:30, 4 hours This examination paper consists of 7 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF4380 Introduction to Robotics Day of exam: 31 th May, 2017 Exam hours: 14:30, 4 hours This examination paper consists of 7 pages
ME 115(a): Final Exam (Winter Quarter 2009/2010)
: Final Exam (Winter Quarter 2009/2010)") ME 115(a): Final Exam (Winter Quarter 2009/2010) Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask a question, or go to
ME 115(a): Final Exam (Winter Quarter 2009/2010) Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask a question, or go to
INTERNATIONAL JOURNAL OF MECHANICAL ENGINEERING AND TECHNOLOGY (IJMET) ADVANCEMENT AND STIMULATION OF FIVE DEGREE OF FREEDOM ROBOT LEVER ARM
 ADVANCEMENT AND STIMULATION OF FIVE DEGREE OF FREEDOM ROBOT LEVER ARM") INTERNATIONAL JOURNAL OF MECHANICAL ENGINEERING AND TECHNOLOGY (IJMET) International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print), ISSN 0976 6340 (Print) ISSN 0976 6359
INTERNATIONAL JOURNAL OF MECHANICAL ENGINEERING AND TECHNOLOGY (IJMET) International Journal of Mechanical Engineering and Technology (IJMET), ISSN 0976 6340(Print), ISSN 0976 6340 (Print) ISSN 0976 6359
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator robot
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Solution of inverse kinematic problem for serial robot using dual quaterninons and plucker coordinates
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2009 Solution of inverse kinematic problem for
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2009 Solution of inverse kinematic problem for
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Homogeneous coordinates, lines, screws and twists
 Homogeneous coordinates, lines, screws and twists In lecture 1 of module 2, a brief mention was made of homogeneous coordinates, lines in R 3, screws and twists to describe the general motion of a rigid
Homogeneous coordinates, lines, screws and twists In lecture 1 of module 2, a brief mention was made of homogeneous coordinates, lines in R 3, screws and twists to describe the general motion of a rigid
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: 31 th May, 2017 Exam hours: 14:30, 4 hours This examination paper consists of 6 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: 31 th May, 2017 Exam hours: 14:30, 4 hours This examination paper consists of 6 pages
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS
 Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS Amit L Talli 1, B. B. Kotturshettar 2 Asst. Professor, Department of Automation & Robotics
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS Amit L Talli 1, B. B. Kotturshettar 2 Asst. Professor, Department of Automation & Robotics
Using Algebraic Geometry to Study the Motions of a Robotic Arm
 Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
Virtual Robot Kinematic Learning System: A New Teaching Approach
 Virtual Robot Kinematic Learning System: A New Teaching Approach 1 Haslina Arshad, 2 Khor Ching Yir, 3 Lam Meng Chun 1,2,3 School of Information Technology, Faculty of Information Science and Technology,
Virtual Robot Kinematic Learning System: A New Teaching Approach 1 Haslina Arshad, 2 Khor Ching Yir, 3 Lam Meng Chun 1,2,3 School of Information Technology, Faculty of Information Science and Technology,
ME 115(b): Final Exam, Spring
: Final Exam, Spring") ME 115(b): Final Exam, Spring 2005-06 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
ME 115(b): Final Exam, Spring 2005-06 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
Inverse Kinematics Solution for Trajectory Tracking using Artificial Neural Networks for SCORBOT ER-4u
 Inverse Kinematics Solution for Trajectory Tracking using Artificial Neural Networks for SCORBOT ER-4u Rahul R Kumar 1, Praneel Chand 2 School of Engineering and Physics The University of the South Pacific
Inverse Kinematics Solution for Trajectory Tracking using Artificial Neural Networks for SCORBOT ER-4u Rahul R Kumar 1, Praneel Chand 2 School of Engineering and Physics The University of the South Pacific
Fundamentals of Robotics Study of a Robot - Chapter 2 and 3
 Fundamentals of Robotics Study of a Robot - Chapter 2 and 3 Sergi Valverde u1068016@correu.udg.edu Daniel Martínez u1068321@correu.udg.edu June 9, 2011 1 Introduction This report introduces the second
Fundamentals of Robotics Study of a Robot - Chapter 2 and 3 Sergi Valverde u1068016@correu.udg.edu Daniel Martínez u1068321@correu.udg.edu June 9, 2011 1 Introduction This report introduces the second
Structure Based Classification and Kinematic Analysis of Six-Joint Industrial Robotic Manipulators
 Structure Based Classification and Kinematic Analysis of Six-Joint Industrial Robotic Manipulators 5 Tuna Balkan, M. Kemal Özgören and M. A. Sahir Arıkan Open Access Database www.i-techonline.com 1. Introduction
Structure Based Classification and Kinematic Analysis of Six-Joint Industrial Robotic Manipulators 5 Tuna Balkan, M. Kemal Özgören and M. A. Sahir Arıkan Open Access Database www.i-techonline.com 1. Introduction
Robot Geometry and Kinematics
 CIS 68/MEAM 50 Robot Geometr and Kinematics CIS 68/MEAM 50 Outline Industrial (conventional) robot arms Basic definitions for understanding -D geometr, kinematics Eamples Classification b geometr Relationship
CIS 68/MEAM 50 Robot Geometr and Kinematics CIS 68/MEAM 50 Outline Industrial (conventional) robot arms Basic definitions for understanding -D geometr, kinematics Eamples Classification b geometr Relationship
Automatic Extraction of DH Parameters of Serial Manipulators using Line Geometry
 The 2 nd Joint International Conference on Multibody System Dynamics May 29-June 1, 2012, Stuttgart, Germany Automatic Extraction of DH Parameters of Serial Manipulators using Line Geometry Rajeevlochana
The 2 nd Joint International Conference on Multibody System Dynamics May 29-June 1, 2012, Stuttgart, Germany Automatic Extraction of DH Parameters of Serial Manipulators using Line Geometry Rajeevlochana
EENG 428 Introduction to Robotics Laboratory EXPERIMENT 5. Robotic Transformations
 EENG 428 Introduction to Robotics Laboratory EXPERIMENT 5 Robotic Transformations Objectives This experiment aims on introducing the homogenous transformation matrix that represents rotation and translation
EENG 428 Introduction to Robotics Laboratory EXPERIMENT 5 Robotic Transformations Objectives This experiment aims on introducing the homogenous transformation matrix that represents rotation and translation
Crane Forwarder-Control Algorithm for Automatic Extension of Prismatic Link
 e -Journal of Science & Technology (e-jst) e-περιοδικό Επιστήμης & Τεχνολογίας 47 Crane Forwarder-Control Algorithm for Automatic Extension of Prismatic Link Jagadeesh Thati 1 and Fazal Noorbasha 2 1 Department
e -Journal of Science & Technology (e-jst) e-περιοδικό Επιστήμης & Τεχνολογίας 47 Crane Forwarder-Control Algorithm for Automatic Extension of Prismatic Link Jagadeesh Thati 1 and Fazal Noorbasha 2 1 Department
Chapter 2 Mechanisms Abstract
 Chapter 2 Mechanisms Abstract This chapter begins with a description of the different types of mechanisms that are generally used, especially in industrial robots. The parameters and variables of the mechanisms
Chapter 2 Mechanisms Abstract This chapter begins with a description of the different types of mechanisms that are generally used, especially in industrial robots. The parameters and variables of the mechanisms
Lecture 3. Planar Kinematics
 Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
A Family of New Parallel Architectures with Four Degrees of Freedom
 A Family of New arallel Architectures with Four Degrees of Freedom DIMITER ZLATANOV AND CLÉMENT M. GOSSELIN Département de Génie Mécanique Université Laval Québec, Québec, Canada, G1K 74 Tel: (418) 656-3474,
A Family of New arallel Architectures with Four Degrees of Freedom DIMITER ZLATANOV AND CLÉMENT M. GOSSELIN Département de Génie Mécanique Université Laval Québec, Québec, Canada, G1K 74 Tel: (418) 656-3474,
NEW APPROACH FOR FORWARD KINEMATIC MODELING OF INDUSTRIAL ROBOTS
 NEW APPROACH FOR FORWARD KINEMATIC MODELING OF INDUSTRIAL ROBOTS Engineering Cozmin CRISTOIU 1 Adrian NICOLESCU 2 ABSTRACT: DESIGNING AND CONTROLLING INDUSTRIAL ROBOTS INVOLVES DETERMINING THE POSITION
NEW APPROACH FOR FORWARD KINEMATIC MODELING OF INDUSTRIAL ROBOTS Engineering Cozmin CRISTOIU 1 Adrian NICOLESCU 2 ABSTRACT: DESIGNING AND CONTROLLING INDUSTRIAL ROBOTS INVOLVES DETERMINING THE POSITION
A DH-parameter based condition for 3R orthogonal manipulators to have 4 distinct inverse kinematic solutions
 Wenger P., Chablat D. et Baili M., A DH-parameter based condition for R orthogonal manipulators to have 4 distinct inverse kinematic solutions, Journal of Mechanical Design, Volume 17, pp. 150-155, Janvier
Wenger P., Chablat D. et Baili M., A DH-parameter based condition for R orthogonal manipulators to have 4 distinct inverse kinematic solutions, Journal of Mechanical Design, Volume 17, pp. 150-155, Janvier
Manipulator kinematics
 CHAPTER 3 Manipulator kinematics 3.1 INTRODUCTION 3.2 LINK DESCRIPTION 3.3 LINK-CONNECTION DESCRIPTION 3.4 CONVENTION FOR AFFIXING FRAMES TO LINKS 3.5 MANIPULATOR KINEMATICS 3.6 ACTUATOR SPACE, JOINT SPACE,
CHAPTER 3 Manipulator kinematics 3.1 INTRODUCTION 3.2 LINK DESCRIPTION 3.3 LINK-CONNECTION DESCRIPTION 3.4 CONVENTION FOR AFFIXING FRAMES TO LINKS 3.5 MANIPULATOR KINEMATICS 3.6 ACTUATOR SPACE, JOINT SPACE,
Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics
 Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics Arun Dayal Udai, C.G Rajeevlochana, Subir Kumar Saha Abstract The paper discusses a method for the dynamic simulation of a KUKA
Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics Arun Dayal Udai, C.G Rajeevlochana, Subir Kumar Saha Abstract The paper discusses a method for the dynamic simulation of a KUKA
autorob.github.io Inverse Kinematics UM EECS 398/598 - autorob.github.io
 autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
Homework Assignment /645 Fall Instructions and Score Sheet (hand in with answers)
") Homework Assignment 4 600.445/645 Fall 2018 Instructions and Score Sheet (hand in with answers Name Email Other contact information (optional Signature (required I have followed the rules in completing
Homework Assignment 4 600.445/645 Fall 2018 Instructions and Score Sheet (hand in with answers Name Email Other contact information (optional Signature (required I have followed the rules in completing
Inverse Kinematics of a Rhino Robot
 Inverse Kinematics of a Rhino Robot Rhino Robot (http://verona.fi-p.unam.mx/gpocontrol/images/rhino1.jpg) A Rhino robot is very similar to a 2-link arm with the exception that The base can rotate, allowing
Inverse Kinematics of a Rhino Robot Rhino Robot (http://verona.fi-p.unam.mx/gpocontrol/images/rhino1.jpg) A Rhino robot is very similar to a 2-link arm with the exception that The base can rotate, allowing
Advances in Engineering Research, volume 123 2nd International Conference on Materials Science, Machinery and Energy Engineering (MSMEE 2017)
") Advances in Engineering Research, volume nd International Conference on Materials Science, Machinery and Energy Engineering MSMEE Kinematics Simulation of DOF Manipulator Guangbing Bao,a, Shizhao Liu,b,
Advances in Engineering Research, volume nd International Conference on Materials Science, Machinery and Energy Engineering MSMEE Kinematics Simulation of DOF Manipulator Guangbing Bao,a, Shizhao Liu,b,
ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS
 33 ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS Dan Zhang Faculty of Engineering and Applied Science, University of Ontario Institute of Technology Oshawa, Ontario, L1H 7K, Canada Dan.Zhang@uoit.ca
33 ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS Dan Zhang Faculty of Engineering and Applied Science, University of Ontario Institute of Technology Oshawa, Ontario, L1H 7K, Canada Dan.Zhang@uoit.ca
KINEMATICS PROGRAMMING FOR TWO COOPERATING ROBOTS PERFORMING TASKS
 KINEMATICS PROGRAMMING FOR TWO COOPERATING ROBOTS PERFORMING TASKS Cristiane Pescador Tonetto Universidade Federal do Espírito Santo cris.tonetto@gmail.com Carlos Rodrigues Rocha Instituto Federal de Educação,
KINEMATICS PROGRAMMING FOR TWO COOPERATING ROBOTS PERFORMING TASKS Cristiane Pescador Tonetto Universidade Federal do Espírito Santo cris.tonetto@gmail.com Carlos Rodrigues Rocha Instituto Federal de Educação,
-SOLUTION- ME / ECE 739: Advanced Robotics Homework #2
 ME / ECE 739: Advanced Robotics Homework #2 Due: March 5 th (Thursday) -SOLUTION- Please submit your answers to the questions and all supporting work including your Matlab scripts, and, where appropriate,
ME / ECE 739: Advanced Robotics Homework #2 Due: March 5 th (Thursday) -SOLUTION- Please submit your answers to the questions and all supporting work including your Matlab scripts, and, where appropriate,
Differential Kinematics. Robotics. Differential Kinematics. Vladimír Smutný
 Differential Kinematics Robotics Differential Kinematics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University in Prague
Differential Kinematics Robotics Differential Kinematics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University in Prague
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS
 DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
KINEMATICS OF AN OVERCONSTRAINED MECHANISM IN PRACTICE
 KINEMTICS OF N OVERCONSTRINED MECHNISM IN PRCTICE Vandan Kamlakar Gundale* bstract: In 1939 Paul Schatz, a Swiss anthroposophist and geometrician had invented a mechanism which with few links generates
KINEMTICS OF N OVERCONSTRINED MECHNISM IN PRCTICE Vandan Kamlakar Gundale* bstract: In 1939 Paul Schatz, a Swiss anthroposophist and geometrician had invented a mechanism which with few links generates
Automatic generation of humanoid s geometric model parameters
 Automatic generation of humanoid s geometric model parameters Vincent Hugel and Nicolas Jouandeau LISV, University of Versailles and LIASD, University of Paris 8 Abstract. This paper describes a procedure
Automatic generation of humanoid s geometric model parameters Vincent Hugel and Nicolas Jouandeau LISV, University of Versailles and LIASD, University of Paris 8 Abstract. This paper describes a procedure
Lecture 2: Kinematics of medical robotics
 ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
Inverse Kinematics Programming Assignment
 Inverse Kinematics Programming Assignment CS 448D: Character Animation Due: Wednesday, April 29 th 11:59PM 1 Logistics In this programming assignment, you will implement a simple inverse kinematics solver
Inverse Kinematics Programming Assignment CS 448D: Character Animation Due: Wednesday, April 29 th 11:59PM 1 Logistics In this programming assignment, you will implement a simple inverse kinematics solver
Kinematics - Introduction. Robotics. Kinematics - Introduction. Vladimír Smutný
 Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University