Stereo Matching with Reliable Disparity Propagation
|
|
|
- Blaise Higgins
- 5 years ago
- Views:
Transcription
1 Stereo Matching with Reliable Disparity Propagation Xun Sun, Xing Mei, Shaohui Jiao, Mingcai Zhou, Haitao Wang Samsung Advanced Institute of Technology, China Lab Beijing, China Abstract In this paper, we propose a novel propagationbased stereo matching algorithm. Starting from an initial disparity map, our algorithm selects highly reliable pixels and propagates their disparities along the scanline to produce dense disparity results. The key idea is to construct a line segment region for each pixel with local color and connectivity constraints. The pixelwise line segments are efficiently used to compute initial disparities, select reliable pixels and determine proper propagation regions. Streaking artifacts are effectively removed in a refinement process. Experimental results demonstrate the performance of the proposed method: it ranks 5th in the Middlebury benchmark, and the results can be computed within a few seconds. Keywords-stereo matching; disparity propagation; line segments; I. INTRODUCTION Dense two-frame stereo matching is one of the most actively studied topics in computer vision. Most stereo algorithms can be roughly classified into two categories: local and global methods [1]. Local methods compute each pixel s disparity independently over a support region. The matching costs are aggregated over the region, and the disparity level with the minimal cost is selected as the output of the pixel. The performance of the local methods mainly depends on the support windows they choose: square windows with simple averaging lead to blurred low-quality results in real-time [2], while some recent techniques such as adaptive weight [3], [4] and segment support [5] can produce accurate disparity maps with considerable running time. Global methods formulate the stereo problem as an energy function with data and smoothness constraints, and minimize this function with dynamic programming [6], graph cuts [7] or belief propagation [8]. Global optimizers can greatly suppress the matching ambiguities caused by various factors such as illumination variation and textureless regions, and therefore produce more accurate results than common local methods. And they are usually computationally expensive due to the slow-converging optimization process. Most stateof-the-art algorithms in the Middlebury benchmark [9] fall into this category. Our algorithm is mainly inspired by a class of methods which produce quasi-dense or dense disparity results from a set of seed pixels [10], [11], [12], [13]. These methods first find reliable seed pixels with simple local or sparse matching techniques, and then propagate to neighboring pixels in a growing-like way. If no global optimization is involved in the computation process, the propagation-based methods usually show low computational complexity. However, an inherent problem with these methods is that early wrong matches might lead to large disparity errors during the propagation process. Wei and Quan [14] proposed to use segmented regions as the propagation units, which greatly alleviates the problem. The propagation ranges of the reliable pixels can be well controlled with the segmented regions, but the running time of the algorithm is dominated by the expensive segmentation process. In this paper, we propose a novel stereo matching algorithm based on pixelwise line segments and 1D propagation. Different from previous methods [12], [14], our algorithm only propagates the disparities of the seed pixels along the scanline directions. This 1D restriction allows us to control the propagation process with simple lines instead of complex segmented regions. In practice, the line segments are efficiently constructed for each pixel with color similarity and connectivity constraints. These pixelwise line segments serve not only as the supported regions for initial disparity computation, but also as the reliable regions for accurate disparity propagation. Finally, by employing vertical voting and disparity filtering, our algorithm solves the typical interscanline inconsistency problem due to the 1D propagation. Despite its simplicity, our algorithm shows good performance in both speed and accuracy, which is attractive for real-world stereo applications. The rest of the paper is organized as follows: Section II provides a full description of the algorithm. Section III reports the experimental results. And conclusion is given in Section IV. II. ALGORITHM The framework of our algorithm is shown in Figure 1. First, the pixelwise line segments are constructed (Section II-A). Second, these line segments are used to compute the initial disparity map (Section II-B). Third, the seed pixels with highly reliable disparities are detected with consistency check and confidence evaluation (Section II-C). Fourth, the dense disparity map is generated with scanline propagation and seed pixels (Section II-D). Finally, the artifacts in the
. The spatial distance is defined as D s (p l, p) = p l p.")

.")

2 Input: rectified pairs Line segment construction Initial disparity map computation Seed pixel detection Scanline propagation 2) D s (p 1, p) <L, where D s (p 1, p) is the spatial distance between p 1 and p, and L is a preset maximum length (measured in pixels). The spatial distance is defined as D s (p l, p) = p l p. The first rule guarantees the color similarity in the line region, and the second rule poses a limitation on the line length to avoid over-smoothed disparity results and incorrect propagation. The right ending point p 2 can also be determined by the two rules. And p s line segment is recorded by a pair of length values a l,a r : a l = D s (p 1, p) 1,a r = D s (p 2, p) 1 (1) Output: disparity map Disparity refinement Figure 1. Block diagram of our algorithm with input data, intermediate and final output results. disparity map are removed in a refinement process (Section II-E). In the following, we present a detailed description of these individual steps. A. Line Segment Construction As stated in the introduction, a line segment along the scanline is dynamically built on each pixel of the stereo image pair, which is used as the support region as well as the reliable propagation region. For accurate matching and propagation, the disparities should vary smoothly in each line segment. A simple but effective assumption on support regions is that neighboring pixels with similar colors should have similar disparities (color-disparity consistency), which has been extensively adapted by recent local methods [4], [5]. We also follow this assumption when building the line segments. P1 left ending point P's line segment P P2 right ending point Figure 2. The constructed line segment for pixel p. For a given pixel p, its line segment construction process is illustrated in Figure 2. Starting from p, the left arm of the segment stops at an ending pixel p 1 that breaks one of the two following rules: 1) D c (p 1, p) <τ, where D c (p 1, p) is the color difference between p 1 and p, and τ is a preset threshold value. The color difference is defined as D c (p 1, p) = max I i(p 1 ) I i (p). i=r,g,b Note that we have constructed a horizontal line segment for pixel p. If a vertical line segment is built in a similar way, we get a cross-shaped skeleton. This skeleton can be used to define a dynamic 2D support region over pixel p, which was first proposed by Zhang et al [15]. Compared to 2D support windows [3], [4], [5], [15], our line segments consider only the neighboring pixels in the scanline direction, but this simple structure still provides enough information for disparity computation and propagation with relatively low computation cost, as shown in later sections. B. Initial Disparity Computation This step computes the initial disparity results with a simple local method. Given a pixel p =(x, y) in the left image and a disparity level d, the matching cost C 1 (p,d) is first computed by linearly combining two simple measures: C 1 (p,d)= min(c AD (p,d),λ AD ) (2) + min(c census (p,d),λ census ) where C AD is the RGB color difference of pixel p and its correspondence pd =(x d, y) in the right image: C AD (p,d)= I Left i (p) I Right i (pd) (3) i=r,g,b C census is a cost measure that encodes local image structures with relative orderings of the pixel intensities [16]. It is defined as the Hamming distance of the two 64-bit strings that stand for p and pd respectively. The strings are encoded with a 9 7 census transform. λ AD and λ census are threshold parameters to reject outliers. The reason why we employ Equation (2) for matching cost computation is twofold: first, we experimentally find that the combined AD-Census measure shows improved matching accuracy than individual AD and census measures; second, C census introduces the structure information of a 2D window around each pixel into the cost, which helps to alleviate the computation errors due to the 1D line structures. Next, we employ an aggregation step to reduce the matching ambiguities in the original matching cost volume. The aggregated cost value C 2 (p,d) is computed over p s line
 C 2 (p,d)= C 1(q,d) (4) Line(p) For robust aggregation, this step is iterated for 2 times.")
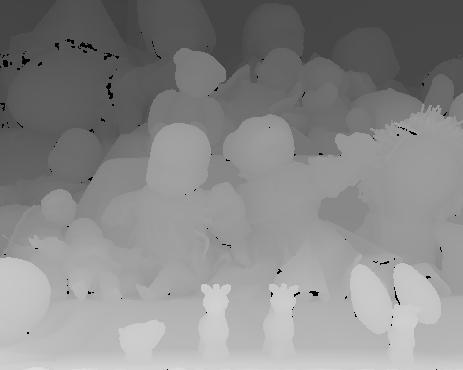
3 Figure 3. The initial disparity map for the Teddy image pair. Erroneous disparities are marked in red. Figure 5. The detected seed pixels for the Teddy disparity map. Erroneous disparities are marked in red. segment: q Line(p) C 2 (p,d)= C 1(q,d) (4) Line(p) For robust aggregation, this step is iterated for 2 times. Finally, the output disparity for pixel p is simply computed with the aggregated cost values C 2 and a winner-take-all searching strategy: D L (p) =argminc 2 (p,d) (5) d In a similar way, the disparity map D R for the right image is computed. The initial disparity map D L for the Teddy image pair is presented in Figure 3, which shows significant errors (marked in red) in occlusion regions, textureless regions and around discontinuities. We tackle these errors with propagation and refinement steps. C. Seed Pixel Detection P0 scanline direction P0's line segment S0 P1 P1's line segment starting pixel seed pixel next pixel next seed pixel next pixel Figure 4. skip S1 skip P2 The seed pixel detection process along the scanline. This step detects the highly reliable seed pixels (also called as ground control points) from the initial disparity map, which serve as a good starting point for the propagation process. We propose to perform a sequential search along each scanline of the map, as shown in Figure 4. Starting from the leftmost pixel p 0 of the scanline, we search for a seed pixel s 0. s 0 is detected as a seed pixel if the following conditions are satisfied: 1) D L (s 0 )=D R (s 0 (D L (s 0 ), 0)) C 2 (s 0,d) 2) C 2 (s 0,D L (s 0 )) >λ c, d = D L (s 0 ) Rule 1 requires s 0 to pass the left-right consistency check, while rule 2 states that pixel s 0 s initial disparity is reliable if its matching cost is significantly smaller than the other competitors. And λ c is a threshold value for evaluating the disparity reliability. When s 0 is found, it is not necessary to detect more seed pixels in p 0 s line segment due to the smooth disparity assumption. The searching process skips some pixels, moves to pixel p 1 (the end of p 0 s line segment) and looks for the next seed pixel s 1, until it reaches the end of the scanline. The seed pixels detected from Teddy s initial disparity map are presented in Figure 5. Compared to the initial disparity map (Figure 3), the erroneous disparities (marked in red) in the seed pixels are greatly reduced, which demonstrates the effectiveness of the evaluation conditions. Another advantage of our detection method is that a large part of the seed pixels are well distributed around depth discontinuities, and some potential seed pixels inside the homogeneous regions are skipped with the line segment information. These pixels can help preserve the depth discontinuities during the propagation process. D. Scanline Propagation S1 left nearest seed point Figure 6. P's line segment P S2 propagation right nearest seed point The scanline propagation process. This step propagates the disparities of the seed pixels
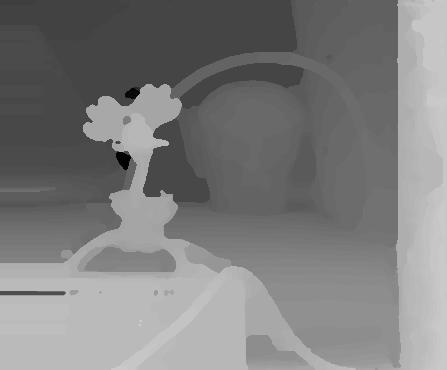
4 along the scanline direction, as shown in Figure 6. For an unseeded pixel p, we first search the left and right nearest seed pixels (s 1, s 2 ) within its line segment. If only one seed pixel is found in the segment, D L (p) is simply replaced by D L (s 1 ) or D L (s 2 ) since no more information can be used for reliable disparity estimation. If both seed pixels are available, the propagation strategy proceeds as follows: 1) D L (p) =min(d L (s 1 ),D L (s 2 )), ifp is in occluded regions. p is detected as occluded if it fails in the left-right consistency check. 2) D L (p) =min(d L (s 1 ),D L (s 2 )), ifp is near depth discontinuities. A depth discontinuity is detected if D L (s 1 ) D L (s 2 ) >α d max. d max is the maximum disparity level. 3) D L (p) is replaced by the linearly interpolated results of D L (s 1 ) and D L (s 2 ) in all other conditions. Once pixel p is updated, it is immediately labelled as a seed pixel for the subsequent pixels. If no seed pixels are found in p s line segment, p is left unchanged. After the scanline propagation process, the remaining unseeded pixels are updated with the minimal disparity values of the nearest seed pixels. This propagation process share some similarities with the traditional dynamic-programming based algorithms [10], [11], [17], since they all work along scanline directions. However, there are some fundamental differences between the two methods: first, most DP-based methods operate on the full matching cost volumes, while our propagation process works only in the image space which leads to much lower computation cost; second, for DP algorithms, the color-disparity consistency assumption is usually added to the energy function as a soft constraint, while for propagation, it is represented with line segments, and then used as a hard constraint to assign disparity values directly to the unseeded pixels. For image regions where this assumption doesn t hold due to image noise or large occlusion, the propagation process might not be as stable as DP algorithms. The updated Teddy disparity map is presented in Figure 7, which shows great improvements over the initial disparity results in occlusion regions and around depth discontinuities. A problem with our scanline propagation is that the line segments can lead to visible streaking artifacts, which need to be solved with a refinement process. E. Disparity Refinement This step refines the disparity map with a two-step process. Vertical Voting: Since the disparity computation relies on horizontal line segments, the streaking artifacts can be reduced by including more disparity information from the vertical direction. For each pixel p, a histogram H p with d max +1 bins (d max is the maximum disparity level) is built for a voting scheme. We collect N disparity votes in a vertical line segment that starts at pixel p (0,N/2) and Figure 7. Figure 8. The Teddy disparity map after the propagation process. The Teddy disparity map after the refinement process. ends at pixel p +(0,N/2): for any pixel q in the line, if the color difference D c (q, p) is smaller than the threshold value τ, the votes on disparity D L (q) increase by 1. Color similarity is considered in the voting process. And D L (p) is updated with the final voting results: D L (p) = arg max H p (d) (6) d After the 1D voting process, most horizontal streaking artifacts in large areas can be effectively alleviated. We further employ a 4-neighbor update method from [18] to remove small scale artifacts and outliers. 4-Neighbor Update with Bilateral Filtering: For pixel p, the disparities from its four neighbors are collected D p = {D L (p ± (1, 0)),D L (p ± (0, 1))}. Then D L (p) is updated as follows: D L (p) =argmin d D p q W p f(q, p)c 3 (d, D L (q)) q W p f(q, p) (7)
5 where q is a pixel in a square window W p over p, f(q, p) is a bilateral weight: f(q, p) =exp( D c(q, p) ) exp( D s(q, p) ) (8) σ c σ s and C 3 (d, D L (q)) = min(β d max, d D L (q) ). In practice, the size of W p is set to for all the data sets. The updated D L (p) value is directly used for the computation of the subsequential pixels. This method further enhances the inter-scanline consistency by propagating good matches in a 4-connected neighborhood. The refined Teddy disparity map is presented in Figure 8, which shows that most streaking artifacts and outliers are effectively removed with the two refinement steps. III. EXPERIMENTAL RESULTS We test our algorithm with the Middlebury benchmark [9]. The test platform is a PC with Core2Duo 3.0GHz CPU and 2GB memory. The parameters are presented in Table I, which are kept constant for all the data sets. Table I PARAMETER SETTINGS FOR THE MIDDLEBURY DATA SETS L τ λ AD λ census λ c N σ s σ c α β The intermediate and final disparity results are presented in Figure 9, which demonstrates the effectiveness of the algorithm: various errors are gradually removed from the initial results with seed pixel detection, scanline propagation and proper refinement. With pixelwise line segments, our algorithm performs well in textureless regions and around depth discontinuities. The quantitative results are presented in Table II. Satisfactory disparity results are achieved for all the data sets. At the time of submission (December 2011), our method ranks 5th in the Middlebury data sets, which is impressive when considering that no global optimization is involved in the computation process. Another advantage of our algorithm is that we do not perform any segmentation operations. Most computations are performed in each pixel s line segment, which brings relatively low computation costs. The running time for the four data sets (Tsukuba, Venus, Teddy and Cones) are 2.5 seconds, 3.8 seconds, 8.7 seconds and 8.6 seconds respectively, which is competitive among the top 10 Middlebury algorithms. The most time-consuming part of the algorithm is the initial disparity computation step, which usually takes about 50% of the running time. We further test our algorithm with more examples in the Middlebury 2005, 2006 data sets [19], [20], and some results are presented in Figure 10. To verify the robustness of the algorithm, we still employ the parameter settings in Table I. Without any parameter tuning, our algorithm shows quite stable performance for these image pairs, and produces satisfactory disparity results. Finally, based on the erroneous regions shown in Figure 9 and 10, we briefly discuss some limitations and possible improvements of the algorithm: First, our algorithm relies on the line segments, which are constructed with local color and connectivity constraints. For most Middlebury data sets with ideal image data, these regions can be constructed with high accuracy, but for practical indoor and outdoor scenes, the image quality might be severely brought down by noise and illumination variation, which leads to incorrect line construction and large computation errors (Figure 10 (e)). Bilateral filtering can suppress image noise without destroying local structures and edges [21], which can used as a pre-process before the line construction step; Second, our algorithm performs the computation along scanline directions. For some regions with large occlusion, there might no reliable pixels in the 1D neighborhood such that wrong disparities are propagated into these regions, as shown in Figure 10 (a)(c)(d). A possible solution, inspired by Hirschmüller s semi-global matching method [22], is to propagate in multiple 1D directions, and select the most reliable disparity candidate for the occluded pixel. Finally, the propagation process operated in the image space, and no refined cost volumes are produced. Therefore, effective sub-pixel interpolation techniques [1], [23] are not available to our algorithm. IV. CONCLUSIONS This paper has presented a simple and effective stereo matching algorithm. The algorithm detects seed pixels with reliable disparities and propagates them to produce the disparity results. The accuracy of the propagation process can be controlled with pixelwise line segments, which shows good performance in both speed and accuracy. As a future work, we would like to apply our algorithm to real world problems. And we plan to port the algorithm to graphics hardware for performance acceleration. ACKNOWLEDGMENT We would like to thank Daniel Scharstein and Richard Szeliski for providing the stereo image data and the test bed. REFERENCES [1] D. Scharstein and R. Szeliski, A taxonomy and evaluation of dense two-frame stereo correspondence algorithms, IJCV, vol. 47, no. 1-3, pp. 7 42, [2] T. Kanade, Development of a video-rate stereo machine, in Image Understanding Workshop, 1994, pp

 Detected seed points.")

 Error maps under pixel")

6 (a) (b) (c) (d) (e) Figure 9. Results on the Middlebury data set. (a) Initial disparity maps. (b) Detected seed points. (c) Scanline propagation results. (d) Refinement disparity maps. (e) Error maps under pixel error threshold 1. Errors in unoccluded and occluded regions are marked in black and gray respectively.
 (d)")




![[20]: (a)](/docs-images/87/95253991/images/7-5.jpg "Aloe. (b)")

")










7 (a) (b) (c) (d) (e) Figure 10. More results from the Middlebury 2005 and 2006 data sets [19], [20]: (a) Aloe. (b) Baby. (c) Cloth. (d) Dolls. (e) Reindeer. For each row (from left to right): left image, right image, detected seed points, final disparity map and groundtruth data. We still use the parameter setting in Table I for these images. Some erroneous regions in the disparity maps are marked with red ellipses.
8 Table II THE RANKINGS IN THE MIDDLEBURY BENCHMARK. THE ERROR PERCENTAGES IN DIFFERENT REGIONS (nonocc, all,disc) ARE PRESENTED. Algorithm Avg. Tsukuba Venus Teddy Cones Rank nonocc all disc nonocc all disc nonocc all disc nonocc all disc CoopRegion [24] DoubleBP [23] Our method OutlierConfi [25] SurfaceStereo [26] [3] A. Hosni, M. Bleyer, M. Gelautz, and C. Rheman, Local stereo matching using geodesic support weights, in Proc. ICIP, 2009, pp [4] K.-J. Yoon and I.-S. Kweon, Adaptive support-weight approach for correspondence search, IEEE TPAMI, vol. 28, no. 4, pp , [5] F. Tombari, S. Mattoccia, and L. D. Stefano, Segmentationbased adaptive support for accurate stereo correspondence, in Proc. PSIVT, 2007, pp [6] A. F. Bobick and S. S. Intille, Large occlusion stereo, IJCV, vol. 33, no. 3, pp , [7] Y. Boykov, O. Veksler, and R. Zabih, Fast approximate energy minimization via graph cuts, IEEE TPAMI, vol. 23, no. 11, pp , [8] P. F. Felzenszwalb and D. P. Huttenlocher, Efficient belief propagation for early vision, IJCV, vol. 70, no. 1, pp , [9] D. Scharstein and R. Szeliski, Middlebury stereo evaluation - version 2, 2010, [10] M. Gong and Y. Yang, Fast stereo matching using reliabilitybased dynamic programming and consistency constraints, in Proc. ICCV, 2003, pp [11] C. Kim, K. M. Lee, B. T. Choi, and S. U. Lee, A dense stereo matching using two-pass dynamic programming with generilized ground truth points, in Proc. CVPR, 2005, pp [12] M. Lhuillier and L. Quan, Match propagation for imagebased modeling and rendering, IEEE TPAMI, vol. 24, no. 8, pp , [17] L. Wang, M. Liao, M. Gong, R. Yang, and D. Nister, Highquality real-time stereo using adaptive cost aggregation and dynamic programming, in Proc. 3DPVT, 2006, pp [18] Q. Yang, L. Wang, and N. Ahuja, A constant-space belief propagation algorithm for stereo matching, in Proc. CVPR, 2010, pp [19] H. Hirschmüller and D. Scharstein, Evaluation of cost functions for stereo matching, in Proc. CVPR, 2007, pp [20] D. Scharstein and C. Pal, Learning conditional random fields for stereo, in Proc. CVPR, 2007, pp [21] C. Tomasi and R. Manduchi, Bilateral filtering for gray and color images, in Proc. ICCV, 1998, pp [22] H. Hirschmüller, Stereo processing by semiglobal matching and mutual information, IEEE TPAMI, vol. 30, no. 2, pp , [23] Q. Yang, L. Wang, R. Yang, H. Stewénius, and D. Nistér, Stereo matching with color-weighted correlation, hierarchical belief propagation and occlusion handling, IEEE TPAMI, vol. 31, no. 3, pp , [24] Z. Wang and Z. Zheng, A region based stereo matching algorithm using cooperative optimization, in Proc. CVPR, 2008, pp [25] X. Li and J. Jia, Stereo matching: An outlier confidence approach, in Proc. ECCV, 2008, pp [26] M. Bleyer, C. Rother, and P. Kohli, Surface stereo with soft segmentation, in Proc. CVPR, 2010, pp [13] J. Čech and R. Šára, Efficient sampling of disparity space for fast and accurate matching, in Proc. CVPR, 2007, pp [14] Y. Wei and L. Quan, Region-based progressive stereo matching, in Proc. CVPR, 2004, pp [15] K. Zhang, J. Lu, and G. Lafruit, Cross-based local stereo matching using orthogonal integral images, IEEE TCSVT, vol. 19, no. 7, pp , [16] R. Zabih and J. Woodfill, Non-parametric local transforms for computing visual correspondence, in Proc. ECCV, 1994, pp
On Building an Accurate Stereo Matching System on Graphics Hardware
 On Building an Accurate Stereo Matching System on Graphics Hardware Xing Mei 1,2, Xun Sun 1, Mingcai Zhou 1, Shaohui Jiao 1, Haitao Wang 1, Xiaopeng Zhang 2 1 Samsung Advanced Institute of Technology,
On Building an Accurate Stereo Matching System on Graphics Hardware Xing Mei 1,2, Xun Sun 1, Mingcai Zhou 1, Shaohui Jiao 1, Haitao Wang 1, Xiaopeng Zhang 2 1 Samsung Advanced Institute of Technology,
Real-time Global Stereo Matching Using Hierarchical Belief Propagation
 1 Real-time Global Stereo Matching Using Hierarchical Belief Propagation Qingxiong Yang 1 Liang Wang 1 Ruigang Yang 1 Shengnan Wang 2 Miao Liao 1 David Nistér 1 1 Center for Visualization and Virtual Environments,
1 Real-time Global Stereo Matching Using Hierarchical Belief Propagation Qingxiong Yang 1 Liang Wang 1 Ruigang Yang 1 Shengnan Wang 2 Miao Liao 1 David Nistér 1 1 Center for Visualization and Virtual Environments,
Segment-Tree based Cost Aggregation for Stereo Matching
 Segment-Tree based Cost Aggregation for Stereo Matching Xing Mei 1, Xun Sun 2, Weiming Dong 1, Haitao Wang 2, Xiaopeng Zhang 1 1 NLPR, Institute of Automation, Chinese Academy of Sciences, Beijing, China
Segment-Tree based Cost Aggregation for Stereo Matching Xing Mei 1, Xun Sun 2, Weiming Dong 1, Haitao Wang 2, Xiaopeng Zhang 1 1 NLPR, Institute of Automation, Chinese Academy of Sciences, Beijing, China
Improving the accuracy of fast dense stereo correspondence algorithms by enforcing local consistency of disparity fields
 Improving the accuracy of fast dense stereo correspondence algorithms by enforcing local consistency of disparity fields Stefano Mattoccia University of Bologna Dipartimento di Elettronica, Informatica
Improving the accuracy of fast dense stereo correspondence algorithms by enforcing local consistency of disparity fields Stefano Mattoccia University of Bologna Dipartimento di Elettronica, Informatica
STEREO matching has been one of the most active research
 > TCSVT < 1 Color Image Guided Boundary-inconsistent Region Refinement for Stereo Matching Jianbo Jiao, Student Member, IEEE, Ronggang Wang*, Member, IEEE, Wenmin Wang, Member, IEEE, Dagang Li, Member,
> TCSVT < 1 Color Image Guided Boundary-inconsistent Region Refinement for Stereo Matching Jianbo Jiao, Student Member, IEEE, Ronggang Wang*, Member, IEEE, Wenmin Wang, Member, IEEE, Dagang Li, Member,
Probabilistic Correspondence Matching using Random Walk with Restart
 C. OH, B. HAM, K. SOHN: PROBABILISTIC CORRESPONDENCE MATCHING 1 Probabilistic Correspondence Matching using Random Walk with Restart Changjae Oh ocj1211@yonsei.ac.kr Bumsub Ham mimo@yonsei.ac.kr Kwanghoon
C. OH, B. HAM, K. SOHN: PROBABILISTIC CORRESPONDENCE MATCHING 1 Probabilistic Correspondence Matching using Random Walk with Restart Changjae Oh ocj1211@yonsei.ac.kr Bumsub Ham mimo@yonsei.ac.kr Kwanghoon
Real-Time Disparity Map Computation Based On Disparity Space Image
 Real-Time Disparity Map Computation Based On Disparity Space Image Nadia Baha and Slimane Larabi Computer Science Department, University of Science and Technology USTHB, Algiers, Algeria nbahatouzene@usthb.dz,
Real-Time Disparity Map Computation Based On Disparity Space Image Nadia Baha and Slimane Larabi Computer Science Department, University of Science and Technology USTHB, Algiers, Algeria nbahatouzene@usthb.dz,
A FAST SEGMENTATION-DRIVEN ALGORITHM FOR ACCURATE STEREO CORRESPONDENCE. Stefano Mattoccia and Leonardo De-Maeztu
 A FAST SEGMENTATION-DRIVEN ALGORITHM FOR ACCURATE STEREO CORRESPONDENCE Stefano Mattoccia and Leonardo De-Maeztu University of Bologna, Public University of Navarre ABSTRACT Recent cost aggregation strategies
A FAST SEGMENTATION-DRIVEN ALGORITHM FOR ACCURATE STEREO CORRESPONDENCE Stefano Mattoccia and Leonardo De-Maeztu University of Bologna, Public University of Navarre ABSTRACT Recent cost aggregation strategies
A Near Real-Time Color Stereo Matching Method for GPU
 A Near Real-Time Color Stereo Matching Method for GPU Naiyu Zhang, Hongjian Wang, Jean-Charles Créput, Julien Moreau and Yassine Ruichek IRTES-SeT, Université de Technologie de Belfort-Montbéliard, Belfort,
A Near Real-Time Color Stereo Matching Method for GPU Naiyu Zhang, Hongjian Wang, Jean-Charles Créput, Julien Moreau and Yassine Ruichek IRTES-SeT, Université de Technologie de Belfort-Montbéliard, Belfort,
segments. The geometrical relationship of adjacent planes such as parallelism and intersection is employed for determination of whether two planes sha
 A New Segment-based Stereo Matching using Graph Cuts Daolei Wang National University of Singapore EA #04-06, Department of Mechanical Engineering Control and Mechatronics Laboratory, 10 Kent Ridge Crescent
A New Segment-based Stereo Matching using Graph Cuts Daolei Wang National University of Singapore EA #04-06, Department of Mechanical Engineering Control and Mechatronics Laboratory, 10 Kent Ridge Crescent
Linear stereo matching
 Linear stereo matching Leonardo De-Maeztu 1 Stefano Mattoccia 2 Arantxa Villanueva 1 Rafael Cabeza 1 1 Public University of Navarre Pamplona, Spain 2 University of Bologna Bologna, Italy {leonardo.demaeztu,avilla,rcabeza}@unavarra.es
Linear stereo matching Leonardo De-Maeztu 1 Stefano Mattoccia 2 Arantxa Villanueva 1 Rafael Cabeza 1 1 Public University of Navarre Pamplona, Spain 2 University of Bologna Bologna, Italy {leonardo.demaeztu,avilla,rcabeza}@unavarra.es
SIMPLE BUT EFFECTIVE TREE STRUCTURES FOR DYNAMIC PROGRAMMING-BASED STEREO MATCHING
 SIMPLE BUT EFFECTIVE TREE STRUCTURES FOR DYNAMIC PROGRAMMING-BASED STEREO MATCHING Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, ViennaUniversityofTechnology
SIMPLE BUT EFFECTIVE TREE STRUCTURES FOR DYNAMIC PROGRAMMING-BASED STEREO MATCHING Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, ViennaUniversityofTechnology
Bilateral and Trilateral Adaptive Support Weights in Stereo Vision
 Cost -based In GPU and Support Weights in Vision Student, Colorado School of Mines rbeethe@mines.edu April 7, 2016 1 / 36 Overview Cost -based In GPU 1 Cost 2 3 -based 4 In GPU 2 / 36 Cost -based In GPU
Cost -based In GPU and Support Weights in Vision Student, Colorado School of Mines rbeethe@mines.edu April 7, 2016 1 / 36 Overview Cost -based In GPU 1 Cost 2 3 -based 4 In GPU 2 / 36 Cost -based In GPU
Fast Stereo Matching using Adaptive Window based Disparity Refinement
 Avestia Publishing Journal of Multimedia Theory and Applications (JMTA) Volume 2, Year 2016 Journal ISSN: 2368-5956 DOI: 10.11159/jmta.2016.001 Fast Stereo Matching using Adaptive Window based Disparity
Avestia Publishing Journal of Multimedia Theory and Applications (JMTA) Volume 2, Year 2016 Journal ISSN: 2368-5956 DOI: 10.11159/jmta.2016.001 Fast Stereo Matching using Adaptive Window based Disparity
A Locally Linear Regression Model for Boundary Preserving Regularization in Stereo Matching
 A Locally Linear Regression Model for Boundary Preserving Regularization in Stereo Matching Shengqi Zhu 1, Li Zhang 1, and Hailin Jin 2 1 University of Wisconsin - Madison 2 Adobe Systems Incorporated
A Locally Linear Regression Model for Boundary Preserving Regularization in Stereo Matching Shengqi Zhu 1, Li Zhang 1, and Hailin Jin 2 1 University of Wisconsin - Madison 2 Adobe Systems Incorporated
Stereo Matching: An Outlier Confidence Approach
 Stereo Matching: An Outlier Confidence Approach Li Xu and Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {xuli,leojia}@cse.cuhk.edu.hk Abstract. One of the
Stereo Matching: An Outlier Confidence Approach Li Xu and Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {xuli,leojia}@cse.cuhk.edu.hk Abstract. One of the
Improved depth map estimation in Stereo Vision
 Improved depth map estimation in Stereo Vision Hajer Fradi and and Jean-Luc Dugelay EURECOM, Sophia Antipolis, France ABSTRACT In this paper, we present a new approach for dense stereo matching which is
Improved depth map estimation in Stereo Vision Hajer Fradi and and Jean-Luc Dugelay EURECOM, Sophia Antipolis, France ABSTRACT In this paper, we present a new approach for dense stereo matching which is
Fusing Color and Texture Features for Stereo Matching
 Proceeding of the IEEE International Conference on Information and Automation Yinchuan, China, August 2013 Fusing Color and Texture Features for Stereo Matching Yaolin Hou, Jian Yao, Bing Zhou, and Yaping
Proceeding of the IEEE International Conference on Information and Automation Yinchuan, China, August 2013 Fusing Color and Texture Features for Stereo Matching Yaolin Hou, Jian Yao, Bing Zhou, and Yaping
Stereo Vision II: Dense Stereo Matching
 Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
A novel heterogeneous framework for stereo matching
 A novel heterogeneous framework for stereo matching Leonardo De-Maeztu 1, Stefano Mattoccia 2, Arantxa Villanueva 1 and Rafael Cabeza 1 1 Department of Electrical and Electronic Engineering, Public University
A novel heterogeneous framework for stereo matching Leonardo De-Maeztu 1, Stefano Mattoccia 2, Arantxa Villanueva 1 and Rafael Cabeza 1 1 Department of Electrical and Electronic Engineering, Public University
Data Term. Michael Bleyer LVA Stereo Vision
 Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Towards a Simulation Driven Stereo Vision System
 Towards a Simulation Driven Stereo Vision System Martin Peris Cyberdyne Inc., Japan Email: martin peris@cyberdyne.jp Sara Martull University of Tsukuba, Japan Email: info@martull.com Atsuto Maki Toshiba
Towards a Simulation Driven Stereo Vision System Martin Peris Cyberdyne Inc., Japan Email: martin peris@cyberdyne.jp Sara Martull University of Tsukuba, Japan Email: info@martull.com Atsuto Maki Toshiba
Global Stereo Matching Leveraged by Sparse Ground Control Points
 Global Stereo Matching Leveraged by Sparse Ground Control Points Liang Wang Ruigang Yang Center for Visualization and Virtual Environments, University of Kentucky 329 Rose Street, Lexington, KY, 40506-0633,
Global Stereo Matching Leveraged by Sparse Ground Control Points Liang Wang Ruigang Yang Center for Visualization and Virtual Environments, University of Kentucky 329 Rose Street, Lexington, KY, 40506-0633,
3D RECONSTRUCTION FROM STEREO/ RANGE IMAGES
 University of Kentucky UKnowledge University of Kentucky Master's Theses Graduate School 2007 3D RECONSTRUCTION FROM STEREO/ RANGE IMAGES Qingxiong Yang University of Kentucky, qyang2@uky.edu Click here
University of Kentucky UKnowledge University of Kentucky Master's Theses Graduate School 2007 3D RECONSTRUCTION FROM STEREO/ RANGE IMAGES Qingxiong Yang University of Kentucky, qyang2@uky.edu Click here
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Accurate Disparity Estimation Based on Integrated Cost Initialization
 Sensors & Transducers 203 by IFSA http://www.sensorsportal.com Accurate Disparity Estimation Based on Integrated Cost Initialization Haixu Liu, 2 Xueming Li School of Information and Communication Engineering,
Sensors & Transducers 203 by IFSA http://www.sensorsportal.com Accurate Disparity Estimation Based on Integrated Cost Initialization Haixu Liu, 2 Xueming Li School of Information and Communication Engineering,
A locally global approach to stereo correspondence
 A locally global approach to stereo correspondence Stefano Mattoccia Department of Electronics Computer Science and Systems (DEIS) Advanced Research Center on Electronic Systems (ARCES) University of Bologna,
A locally global approach to stereo correspondence Stefano Mattoccia Department of Electronics Computer Science and Systems (DEIS) Advanced Research Center on Electronic Systems (ARCES) University of Bologna,
Temporally Consistence Depth Estimation from Stereo Video Sequences
 Temporally Consistence Depth Estimation from Stereo Video Sequences Ji-Hun Mun and Yo-Sung Ho (&) School of Information and Communications, Gwangju Institute of Science and Technology (GIST), 123 Cheomdangwagi-ro,
Temporally Consistence Depth Estimation from Stereo Video Sequences Ji-Hun Mun and Yo-Sung Ho (&) School of Information and Communications, Gwangju Institute of Science and Technology (GIST), 123 Cheomdangwagi-ro,
PatchMatch Stereo - Stereo Matching with Slanted Support Windows
 M. BLEYER, C. RHEMANN, C. ROTHER: PATCHMATCH STEREO 1 PatchMatch Stereo - Stereo Matching with Slanted Support Windows Michael Bleyer 1 bleyer@ims.tuwien.ac.at Christoph Rhemann 1 rhemann@ims.tuwien.ac.at
M. BLEYER, C. RHEMANN, C. ROTHER: PATCHMATCH STEREO 1 PatchMatch Stereo - Stereo Matching with Slanted Support Windows Michael Bleyer 1 bleyer@ims.tuwien.ac.at Christoph Rhemann 1 rhemann@ims.tuwien.ac.at
A Local Iterative Refinement Method for Adaptive Support-Weight Stereo Matching
 A Local Iterative Refinement Method for Adaptive Support-Weight Stereo Matching Eric T. Psota, Jędrzej Kowalczuk, Jay Carlson, and Lance C. Pérez Department of Electrical Engineering, University of Nebraska,
A Local Iterative Refinement Method for Adaptive Support-Weight Stereo Matching Eric T. Psota, Jędrzej Kowalczuk, Jay Carlson, and Lance C. Pérez Department of Electrical Engineering, University of Nebraska,
Evaluation of Stereo Algorithms for 3D Object Recognition
 Evaluation of Stereo Algorithms for 3D Object Recognition Federico Tombari Fabio Gori Luigi Di Stefano DEIS/ARCES - University of Bologna, Bologna, Italy federico.tombari@unibo.it fabio.gori2@studio.unibo.it
Evaluation of Stereo Algorithms for 3D Object Recognition Federico Tombari Fabio Gori Luigi Di Stefano DEIS/ARCES - University of Bologna, Bologna, Italy federico.tombari@unibo.it fabio.gori2@studio.unibo.it
Local stereo matching using combined matching cost and adaptive cost aggregation
 KSII TRANSACTIONS ON INTERNET AND INFORMATION SYSTEMS VOL. 9, NO. 1, Jan. 2015 224 Copyright 2015 KSII Local stereo matching using combined matching cost and adaptive cost aggregation Shiping Zhu 1 *,
KSII TRANSACTIONS ON INTERNET AND INFORMATION SYSTEMS VOL. 9, NO. 1, Jan. 2015 224 Copyright 2015 KSII Local stereo matching using combined matching cost and adaptive cost aggregation Shiping Zhu 1 *,
Segmentation Based Stereo. Michael Bleyer LVA Stereo Vision
 Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
MACHINE VISION APPLICATIONS. Faculty of Engineering Technology, Technology Campus, Universiti Teknikal Malaysia Durian Tunggal, Melaka, Malaysia
 Journal of Fundamental and Applied Sciences ISSN 1112-9867 Research Article Special Issue Available online at http://www.jfas.info DISPARITY REFINEMENT PROCESS BASED ON RANSAC PLANE FITTING FOR MACHINE
Journal of Fundamental and Applied Sciences ISSN 1112-9867 Research Article Special Issue Available online at http://www.jfas.info DISPARITY REFINEMENT PROCESS BASED ON RANSAC PLANE FITTING FOR MACHINE
Supplementary Material for ECCV 2012 Paper: Extracting 3D Scene-consistent Object Proposals and Depth from Stereo Images
 Supplementary Material for ECCV 2012 Paper: Extracting 3D Scene-consistent Object Proposals and Depth from Stereo Images Michael Bleyer 1, Christoph Rhemann 1,2, and Carsten Rother 2 1 Vienna University
Supplementary Material for ECCV 2012 Paper: Extracting 3D Scene-consistent Object Proposals and Depth from Stereo Images Michael Bleyer 1, Christoph Rhemann 1,2, and Carsten Rother 2 1 Vienna University
Near Real-Time Stereo Matching Using Geodesic Diffusion
 410 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 34, NO. 2, FEBRUARY 2012 Near Real-Time Stereo Matching Using Geodesic Diffusion Leonardo De-Maeztu, Arantxa Villanueva, Member,
410 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 34, NO. 2, FEBRUARY 2012 Near Real-Time Stereo Matching Using Geodesic Diffusion Leonardo De-Maeztu, Arantxa Villanueva, Member,
POST PROCESSING VOTING TECHNIQUES FOR LOCAL STEREO MATCHING
 STUDIA UNIV. BABEŞ BOLYAI, INFORMATICA, Volume LIX, Number 1, 2014 POST PROCESSING VOTING TECHNIQUES FOR LOCAL STEREO MATCHING ALINA MIRON Abstract. In this paper we propose two extensions to the Disparity
STUDIA UNIV. BABEŞ BOLYAI, INFORMATICA, Volume LIX, Number 1, 2014 POST PROCESSING VOTING TECHNIQUES FOR LOCAL STEREO MATCHING ALINA MIRON Abstract. In this paper we propose two extensions to the Disparity
Joint Histogram Based Cost Aggregation for Stereo Matching
 IEEE TRANSACTION ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 Joint Histogram Based Cost Aggregation for Stereo Matching Dongbo Min, Member, IEEE, Jiangbo Lu, Member, IEEE, and Minh N. Do, Senior Member,
IEEE TRANSACTION ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 Joint Histogram Based Cost Aggregation for Stereo Matching Dongbo Min, Member, IEEE, Jiangbo Lu, Member, IEEE, and Minh N. Do, Senior Member,
Stereo Vision Based Image Maching on 3D Using Multi Curve Fitting Algorithm
 Stereo Vision Based Image Maching on 3D Using Multi Curve Fitting Algorithm 1 Dr. Balakrishnan and 2 Mrs. V. Kavitha 1 Guide, Director, Indira Ganesan College of Engineering, Trichy. India. 2 Research
Stereo Vision Based Image Maching on 3D Using Multi Curve Fitting Algorithm 1 Dr. Balakrishnan and 2 Mrs. V. Kavitha 1 Guide, Director, Indira Ganesan College of Engineering, Trichy. India. 2 Research
In ICIP 2017, Beijing, China MONDRIAN STEREO. Middlebury College Middlebury, VT, USA
 In ICIP 2017, Beijing, China MONDRIAN STEREO Dylan Quenneville Daniel Scharstein Middlebury College Middlebury, VT, USA ABSTRACT Untextured scenes with complex occlusions still present challenges to modern
In ICIP 2017, Beijing, China MONDRIAN STEREO Dylan Quenneville Daniel Scharstein Middlebury College Middlebury, VT, USA ABSTRACT Untextured scenes with complex occlusions still present challenges to modern
EUSIPCO
 EUSIPCO 2013 1569743475 EFFICIENT DISPARITY CALCULATION BASED ON STEREO VISION WITH GROUND OBSTACLE ASSUMPTION Zhen Zhang, Xiao Ai, and Naim Dahnoun Department of Electrical and Electronic Engineering
EUSIPCO 2013 1569743475 EFFICIENT DISPARITY CALCULATION BASED ON STEREO VISION WITH GROUND OBSTACLE ASSUMPTION Zhen Zhang, Xiao Ai, and Naim Dahnoun Department of Electrical and Electronic Engineering
Filter Flow: Supplemental Material
 Filter Flow: Supplemental Material Steven M. Seitz University of Washington Simon Baker Microsoft Research We include larger images and a number of additional results obtained using Filter Flow [5]. 1
Filter Flow: Supplemental Material Steven M. Seitz University of Washington Simon Baker Microsoft Research We include larger images and a number of additional results obtained using Filter Flow [5]. 1
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Stereo Vision in Structured Environments by Consistent Semi-Global Matching
 Stereo Vision in Structured Environments by Consistent Semi-Global Matching Heiko Hirschmüller Institute of Robotics and Mechatronics Oberpfaffenhofen German Aerospace Center (DLR), 82230 Wessling, Germany.
Stereo Vision in Structured Environments by Consistent Semi-Global Matching Heiko Hirschmüller Institute of Robotics and Mechatronics Oberpfaffenhofen German Aerospace Center (DLR), 82230 Wessling, Germany.
CONVOLUTIONAL COST AGGREGATION FOR ROBUST STEREO MATCHING. Somi Jeong Seungryong Kim Bumsub Ham Kwanghoon Sohn
 CONVOLUTIONAL COST AGGREGATION FOR ROBUST STEREO MATCHING Somi Jeong Seungryong Kim Bumsub Ham Kwanghoon Sohn School of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea E-mail: khsohn@yonsei.ac.kr
CONVOLUTIONAL COST AGGREGATION FOR ROBUST STEREO MATCHING Somi Jeong Seungryong Kim Bumsub Ham Kwanghoon Sohn School of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea E-mail: khsohn@yonsei.ac.kr
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Image Guided Cost Aggregation for Hierarchical Depth Map Fusion
 Image Guided Cost Aggregation for Hierarchical Depth Map Fusion Thilo Borgmann and Thomas Sikora Communication Systems Group, Technische Universität Berlin {borgmann, sikora}@nue.tu-berlin.de Keywords:
Image Guided Cost Aggregation for Hierarchical Depth Map Fusion Thilo Borgmann and Thomas Sikora Communication Systems Group, Technische Universität Berlin {borgmann, sikora}@nue.tu-berlin.de Keywords:
Adaptive Support-Weight Approach for Correspondence Search
 650 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 28, NO. 4, APRIL 2006 Adaptive Support-Weight Approach for Correspondence Search Kuk-Jin Yoon, Student Member, IEEE, and In So Kweon,
650 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 28, NO. 4, APRIL 2006 Adaptive Support-Weight Approach for Correspondence Search Kuk-Jin Yoon, Student Member, IEEE, and In So Kweon,
Efficient Large-Scale Stereo Matching
 Efficient Large-Scale Stereo Matching Andreas Geiger*, Martin Roser* and Raquel Urtasun** *KARLSRUHE INSTITUTE OF TECHNOLOGY **TOYOTA TECHNOLOGICAL INSTITUTE AT CHICAGO KIT University of the State of Baden-Wuerttemberg
Efficient Large-Scale Stereo Matching Andreas Geiger*, Martin Roser* and Raquel Urtasun** *KARLSRUHE INSTITUTE OF TECHNOLOGY **TOYOTA TECHNOLOGICAL INSTITUTE AT CHICAGO KIT University of the State of Baden-Wuerttemberg
Near real-time Fast Bilateral Stereo on the GPU
 Near real-time Fast Bilateral Stereo on the GPU Stefano Mattoccia DEIS - ARCES University of Bologna stefano.mattoccia@unibo.it Marco Viti DEIS University of Bologna vitimar@gmail.com Florian Ries ARCES
Near real-time Fast Bilateral Stereo on the GPU Stefano Mattoccia DEIS - ARCES University of Bologna stefano.mattoccia@unibo.it Marco Viti DEIS University of Bologna vitimar@gmail.com Florian Ries ARCES
A Constant-Space Belief Propagation Algorithm for Stereo Matching
 A Constant-Space Belief Propagation Algorithm for Stereo Matching Qingxiong Yang Liang Wang Narendra Ahuja University of Illinois at Urbana Champaign University of Kentucky http://vision.ai.uiuc.edu/ qyang6/
A Constant-Space Belief Propagation Algorithm for Stereo Matching Qingxiong Yang Liang Wang Narendra Ahuja University of Illinois at Urbana Champaign University of Kentucky http://vision.ai.uiuc.edu/ qyang6/
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Segment-based Stereo Matching Using Graph Cuts
 Segment-based Stereo Matching Using Graph Cuts Li Hong George Chen Advanced System Technology San Diego Lab, STMicroelectronics, Inc. li.hong@st.com george-qian.chen@st.com Abstract In this paper, we present
Segment-based Stereo Matching Using Graph Cuts Li Hong George Chen Advanced System Technology San Diego Lab, STMicroelectronics, Inc. li.hong@st.com george-qian.chen@st.com Abstract In this paper, we present
CONTENTS. High-Accuracy Stereo Depth Maps Using Structured Light. Yeojin Yoon
 [Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
[Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Asymmetric 2 1 pass stereo matching algorithm for real images
 455, 057004 May 2006 Asymmetric 21 pass stereo matching algorithm for real images Chi Chu National Chiao Tung University Department of Computer Science Hsinchu, Taiwan 300 Chin-Chen Chang National United
455, 057004 May 2006 Asymmetric 21 pass stereo matching algorithm for real images Chi Chu National Chiao Tung University Department of Computer Science Hsinchu, Taiwan 300 Chin-Chen Chang National United
This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and
 This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution
This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A Constant-Space Belief Propagation Algorithm for Stereo Matching
 A Constant-Space Belief Propagation Algorithm for Stereo Matching Qingxiong Yang Liang Wang Narendra Ahuja University of Illinois at Urbana Champaign University of Kentucky http://vision.ai.uiuc.edu/ qyang6/
A Constant-Space Belief Propagation Algorithm for Stereo Matching Qingxiong Yang Liang Wang Narendra Ahuja University of Illinois at Urbana Champaign University of Kentucky http://vision.ai.uiuc.edu/ qyang6/
A Symmetric Patch-Based Correspondence Model for Occlusion Handling
 A Symmetric Patch-Based Correspondence Model for Occlusion Handling Yi Deng Qiong Yang Xueyin Lin Xiaoou Tang dengyi00@mails.tsinghua.edu.cn qyang@microsoft.com lxy-dcs@mail.tsinghua.edu.cn xitang@microsoft.com
A Symmetric Patch-Based Correspondence Model for Occlusion Handling Yi Deng Qiong Yang Xueyin Lin Xiaoou Tang dengyi00@mails.tsinghua.edu.cn qyang@microsoft.com lxy-dcs@mail.tsinghua.edu.cn xitang@microsoft.com
Short Papers. Joint Histogram-Based Cost Aggregation for Stereo Matching 1 INTRODUCTION 2 RELATED WORK AND MOTIVATION
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 35, NO. 10, OCTOBER 2013 2539 Short Papers Joint Histogram-Based Cost Aggregation for Stereo Matching Dongbo Min, Member, IEEE, Jiangbo
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 35, NO. 10, OCTOBER 2013 2539 Short Papers Joint Histogram-Based Cost Aggregation for Stereo Matching Dongbo Min, Member, IEEE, Jiangbo
A 3D Reconstruction System Based on Improved Spacetime Stereo
 2010 11th. Int. Conf. Control, Automation, Robotics and Vision Singapore, 5-8th December 2010 A 3D Reconstruction System Based on Improved Spacetime Stereo Federico Tombari 1 LuigiDiStefano 1 Stefano Mattoccia
2010 11th. Int. Conf. Control, Automation, Robotics and Vision Singapore, 5-8th December 2010 A 3D Reconstruction System Based on Improved Spacetime Stereo Federico Tombari 1 LuigiDiStefano 1 Stefano Mattoccia
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
A Performance Study on Different Cost Aggregation Approaches Used in Real-Time Stereo Matching
 International Journal of Computer Vision 75(2), 283 296, 2007 c 2007 Springer Science + Business Media, LLC. Manufactured in the United States. DOI: 10.1007/s11263-006-0032-x A Performance Study on Different
International Journal of Computer Vision 75(2), 283 296, 2007 c 2007 Springer Science + Business Media, LLC. Manufactured in the United States. DOI: 10.1007/s11263-006-0032-x A Performance Study on Different
Real-Time High-Quality Stereo Vision System in FPGA Wenqiang Wang, Jing Yan, Ningyi Xu, Yu Wang, Senior Member, IEEE, and Feng-Hsiung Hsu
 1696 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 25, NO. 10, OCTOBER 2015 Real-Time High-Quality Stereo Vision System in FPGA Wenqiang Wang, Jing Yan, Ningyi Xu, Yu Wang, Senior
1696 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 25, NO. 10, OCTOBER 2015 Real-Time High-Quality Stereo Vision System in FPGA Wenqiang Wang, Jing Yan, Ningyi Xu, Yu Wang, Senior
Perceptual Grouping from Motion Cues Using Tensor Voting
 Perceptual Grouping from Motion Cues Using Tensor Voting 1. Research Team Project Leader: Graduate Students: Prof. Gérard Medioni, Computer Science Mircea Nicolescu, Changki Min 2. Statement of Project
Perceptual Grouping from Motion Cues Using Tensor Voting 1. Research Team Project Leader: Graduate Students: Prof. Gérard Medioni, Computer Science Mircea Nicolescu, Changki Min 2. Statement of Project
Hierarchical Belief Propagation To Reduce Search Space Using CUDA for Stereo and Motion Estimation
 Hierarchical Belief Propagation To Reduce Search Space Using CUDA for Stereo and Motion Estimation Scott Grauer-Gray and Chandra Kambhamettu University of Delaware Newark, DE 19716 {grauerg, chandra}@cis.udel.edu
Hierarchical Belief Propagation To Reduce Search Space Using CUDA for Stereo and Motion Estimation Scott Grauer-Gray and Chandra Kambhamettu University of Delaware Newark, DE 19716 {grauerg, chandra}@cis.udel.edu
Does Color Really Help in Dense Stereo Matching?
 Does Color Really Help in Dense Stereo Matching? Michael Bleyer 1 and Sylvie Chambon 2 1 Vienna University of Technology, Austria 2 Laboratoire Central des Ponts et Chaussées, Nantes, France Dense Stereo
Does Color Really Help in Dense Stereo Matching? Michael Bleyer 1 and Sylvie Chambon 2 1 Vienna University of Technology, Austria 2 Laboratoire Central des Ponts et Chaussées, Nantes, France Dense Stereo
A Novel Segment-based Stereo Matching Algorithm for Disparity Map Generation
 2011 International Conference on Computer and Software Modeling IPCSIT vol.14 (2011) (2011) IACSIT Press, Singapore A Novel Segment-based Stereo Matching Algorithm for Disparity Map Generation Viral H.
2011 International Conference on Computer and Software Modeling IPCSIT vol.14 (2011) (2011) IACSIT Press, Singapore A Novel Segment-based Stereo Matching Algorithm for Disparity Map Generation Viral H.
Stereo Correspondence by Dynamic Programming on a Tree
 Stereo Correspondence by Dynamic Programming on a Tree Olga Veksler University of Western Ontario Computer Science Department, Middlesex College 31 London O A B7 Canada olga@csduwoca Abstract Dynamic programming
Stereo Correspondence by Dynamic Programming on a Tree Olga Veksler University of Western Ontario Computer Science Department, Middlesex College 31 London O A B7 Canada olga@csduwoca Abstract Dynamic programming
Disparity Search Range Estimation: Enforcing Temporal Consistency
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Disparity Search Range Estimation: Enforcing Temporal Consistency Dongbo Min, Sehoon Yea, Zafer Arican, Anthony Vetro TR1-13 April 1 Abstract
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Disparity Search Range Estimation: Enforcing Temporal Consistency Dongbo Min, Sehoon Yea, Zafer Arican, Anthony Vetro TR1-13 April 1 Abstract
A Feature Point Matching Based Approach for Video Objects Segmentation
 A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
A layered stereo matching algorithm using image segmentation and global visibility constraints
 ISPRS Journal of Photogrammetry & Remote Sensing 59 (2005) 128 150 www.elsevier.com/locate/isprsjprs A layered stereo matching algorithm using image segmentation and global visibility constraints Michael
ISPRS Journal of Photogrammetry & Remote Sensing 59 (2005) 128 150 www.elsevier.com/locate/isprsjprs A layered stereo matching algorithm using image segmentation and global visibility constraints Michael
Increasing the Efficiency of Local Stereo by Leveraging Smoothness Constraints
 Increasing the Efficiency of Local Stereo by Leveraging Smoothness Constraints Yilin Wang, Enrique Dunn and Jan-Michael Frahm Department of Computer Science University of North Carolina at Chapel Hill
Increasing the Efficiency of Local Stereo by Leveraging Smoothness Constraints Yilin Wang, Enrique Dunn and Jan-Michael Frahm Department of Computer Science University of North Carolina at Chapel Hill
Stereo Correspondence with Occlusions using Graph Cuts
 Stereo Correspondence with Occlusions using Graph Cuts EE368 Final Project Matt Stevens mslf@stanford.edu Zuozhen Liu zliu2@stanford.edu I. INTRODUCTION AND MOTIVATION Given two stereo images of a scene,
Stereo Correspondence with Occlusions using Graph Cuts EE368 Final Project Matt Stevens mslf@stanford.edu Zuozhen Liu zliu2@stanford.edu I. INTRODUCTION AND MOTIVATION Given two stereo images of a scene,
Classification and evaluation of cost aggregation methods for stereo correspondence
 Classification and evaluation of cost aggregation methods for stereo correspondence Federico Tombari federico.tombari@unibo.it Stefano Mattoccia stefano.mattoccia@unibo.it Elisa Addimanda Luigi Di Stefano
Classification and evaluation of cost aggregation methods for stereo correspondence Federico Tombari federico.tombari@unibo.it Stefano Mattoccia stefano.mattoccia@unibo.it Elisa Addimanda Luigi Di Stefano
Cross-Scale Cost Aggregation for Stereo Matching
 2014 IEEE Conference on Computer Vision and Pattern Recognition Cross-Scale Cost Aggregation for Stereo Matching Kang Zhang 1, Yuqiang Fang 2, Dongbo Min 3, Lifeng Sun 1, Shiqiang Yang 1, Shuicheng Yan
2014 IEEE Conference on Computer Vision and Pattern Recognition Cross-Scale Cost Aggregation for Stereo Matching Kang Zhang 1, Yuqiang Fang 2, Dongbo Min 3, Lifeng Sun 1, Shiqiang Yang 1, Shuicheng Yan
Graph Cut based Continuous Stereo Matching using Locally Shared Labels
 Graph Cut based Continuous Stereo Matching using Locally Shared Labels Tatsunori Taniai University of Tokyo, Japan taniai@iis.u-tokyo.ac.jp Yasuyuki Matsushita Microsoft Research Asia, China yasumat@microsoft.com
Graph Cut based Continuous Stereo Matching using Locally Shared Labels Tatsunori Taniai University of Tokyo, Japan taniai@iis.u-tokyo.ac.jp Yasuyuki Matsushita Microsoft Research Asia, China yasumat@microsoft.com
Comparison of Graph Cuts with Belief Propagation for Stereo, using Identical MRF Parameters
 Comparison of Graph Cuts with Belief Propagation for Stereo, using Identical MRF Parameters Marshall F. Tappen William T. Freeman Computer Science and Artificial Intelligence Laboratory Massachusetts Institute
Comparison of Graph Cuts with Belief Propagation for Stereo, using Identical MRF Parameters Marshall F. Tappen William T. Freeman Computer Science and Artificial Intelligence Laboratory Massachusetts Institute
2 45% Incorrect Estimated Disparities [%] 40% 35% all nonocc textrls discnt 30% 25% 20% 15% Maximum Di
![2 45% Incorrect Estimated Disparities [%] 40% 35% all nonocc textrls discnt 30% 25% 20% 15% Maximum Di](/thumbs/87/95872904.jpg "2 45% Incorrect Estimated Disparities [%] 40% 35% all nonocc textrls discnt 30% 25% 20% 15% Maximum Di") 1 Efficient Disparity Computation without Maximum Disparity for Real-Time Stereo Vision Christian Unger1 1 BMW Group Munich, Germany 2 Chair for Computer Aided Medical Procedures Technische Universität
1 Efficient Disparity Computation without Maximum Disparity for Real-Time Stereo Vision Christian Unger1 1 BMW Group Munich, Germany 2 Chair for Computer Aided Medical Procedures Technische Universität
Efficient Belief Propagation for Early Vision
 Efficient Belief Propagation for Early Vision Pedro F. Felzenszwalb and Daniel P. Huttenlocher Department of Computer Science Cornell University {pff,dph}@cs.cornell.edu Abstract Markov random field models
Efficient Belief Propagation for Early Vision Pedro F. Felzenszwalb and Daniel P. Huttenlocher Department of Computer Science Cornell University {pff,dph}@cs.cornell.edu Abstract Markov random field models
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation
 ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
Bilaterally Weighted Patches for Disparity Map Computation
 2014/07/01 v0.5 IPOL article class Published in Image Processing On Line on 2015 03 11. Submitted on 2014 08 29, accepted on 2015 02 23. ISSN 2105 1232 c 2015 IPOL & the authors CC BY NC SA This article
2014/07/01 v0.5 IPOL article class Published in Image Processing On Line on 2015 03 11. Submitted on 2014 08 29, accepted on 2015 02 23. ISSN 2105 1232 c 2015 IPOL & the authors CC BY NC SA This article
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Depth Map Estimation and Colorization of Anaglyph Images Using Local Color Prior and Reverse Intensity Distribution
 Depth Map Estimation and Colorization of Anaglyph Images Using Local Color Prior and Reverse Intensity Distribution Williem Inha University Incheon 402-751, Korea williem.pao@gmail.com Ramesh Raskar MIT
Depth Map Estimation and Colorization of Anaglyph Images Using Local Color Prior and Reverse Intensity Distribution Williem Inha University Incheon 402-751, Korea williem.pao@gmail.com Ramesh Raskar MIT
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Comparison of stereo inspired optical flow estimation techniques
 Comparison of stereo inspired optical flow estimation techniques ABSTRACT The similarity of the correspondence problems in optical flow estimation and disparity estimation techniques enables methods to
Comparison of stereo inspired optical flow estimation techniques ABSTRACT The similarity of the correspondence problems in optical flow estimation and disparity estimation techniques enables methods to
Solving Stereo Matching Problems using Interior Point Methods
 Solving Stereo Matching Problems using Interior Point Methods Arvind Bhusnurmath GRASP Laboratory University of Pennsylvania bhusnur4@seas.upenn.edu Camillo J. Taylor GRASP Laboratory University of Pennsylvania
Solving Stereo Matching Problems using Interior Point Methods Arvind Bhusnurmath GRASP Laboratory University of Pennsylvania bhusnur4@seas.upenn.edu Camillo J. Taylor GRASP Laboratory University of Pennsylvania
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Detecting motion by means of 2D and 3D information
 Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Detecting motion by means of 2D and 3D information Federico Tombari Stefano Mattoccia Luigi Di Stefano Fabio Tonelli Department of Electronics Computer Science and Systems (DEIS) Viale Risorgimento 2,
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Fast Stereo Matching of Feature Links
 Fast Stereo Matching of Feature Links 011.05.19 Chang-il, Kim Introduction Stereo matching? interesting topics of computer vision researches To determine a disparity between stereo images A fundamental
Fast Stereo Matching of Feature Links 011.05.19 Chang-il, Kim Introduction Stereo matching? interesting topics of computer vision researches To determine a disparity between stereo images A fundamental
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Towards Real-time Stereo using Non-uniform Image Sampling and Sparse Dynamic Programming
 Towards Real-time Stereo using Non-uniform Image Sampling and Sparse Dynamic Programming Michel Sarkis and Klaus Diepold Institute for Data Processing, Technische Universität München Arcisstr. 21, 80290
Towards Real-time Stereo using Non-uniform Image Sampling and Sparse Dynamic Programming Michel Sarkis and Klaus Diepold Institute for Data Processing, Technische Universität München Arcisstr. 21, 80290
Subpixel accurate refinement of disparity maps using stereo correspondences
 Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1. Stereo Processing by Semi-Global Matching and Mutual Information. Heiko Hirschmüller
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 Stereo Processing by Semi-Global Matching and Mutual Information Heiko Hirschmüller Abstract This paper describes the Semi-Global Matching
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 Stereo Processing by Semi-Global Matching and Mutual Information Heiko Hirschmüller Abstract This paper describes the Semi-Global Matching