STEREO matching has been one of the most active research
|
|
|
- Bennett Parker
- 6 years ago
- Views:
Transcription
1 > TCSVT < 1 Color Image Guided Boundary-inconsistent Region Refinement for Stereo Matching Jianbo Jiao, Student Member, IEEE, Ronggang Wang*, Member, IEEE, Wenmin Wang, Member, IEEE, Dagang Li, Member, IEEE, and Wen Gao, Fellow, IEEE Abstract Cost computation, cost aggregation, disparity optimization and disparity refinement are the four main steps for stereo matching. While the first three steps have been widely investigated, few efforts have been taken on disparity refinement. In this letter, we propose a color image guided disparity refinement method to further remove the boundary-inconsistent regions on disparity map. First, the origins of boundary-inconsistent regions are analyzed. Then, these regions are detected with the proposed hybrid-superpixel based strategy. Finally, the detected boundaryinconsistent regions are refined by a modified weighted median filtering method. Experimental results on various stereo matching conditions validate the effectiveness of the proposed method. Furthermore, depth maps obtained by active depth acquisition devices like Kinect can also be well refined with our proposed method. Index Terms Disparity refinement, stereo matching, boundary, Kinect. I. INTRODUCTION STEREO matching has been one of the most active research areas in computer vision. Most of the stereo matching methods can be divided into four steps [1]: cost computation, cost aggregation, disparity optimization, and disparity refinement. Global and local methods are the two main categories of approaches for stereo matching. Global methods such as graph cut [] and belief propagation [3] focus on the disparity optimization process, while local methods put great efforts on the cost aggregation, i.e., seeking robust matching window [], [], [] or edge-aware weights [7]. In addition, the functions for cost computation have also drawn increasing attentions recently [], [7]. However, few efforts have been taken on disparity refinement. Traditional refinement (or post-processing) method typically consists of left-right consistency checking, hole-filling, and a noise-removing filter. In recent years, some new methods were proposed. Mei et al. proposed a cross-region based voting method [] to update the wrong disparities. Rhemann et al. refined the disparities by a weighted median filter [7]. Wang et al. adopted a segmentation-based mechanism [] to handle the fattening effects [1]. Yang used a nonlocal aggregation strategy [9] to refine the disparity map. Jianbo Jiao, Ronggang Wang, Wenmin Wang and Dagang Li are with the Digital Media R&D Center, School of Electronic and Computer Engineering, Peking University Shenzhen Graduate School, China ( jianbojiao@sz.pku.edu.cn; rgwang@pkusz.edu.cn; wangwm@ece.pku.edu.cn; dgli@pkusz.edu.cn). Wen Gao is with the Digital Media R&D Center, School of Electronic and Computer Engineering, Peking University Shenzhen Graduate School, China, and also with the Natl Eng. Lab. for Video Tech., Peking University, China ( wgao@pku.edu.cn). * Ronggang Wang is the corresponding author. Ma et al. employed a constant time weighted median filter [1] for disparity refinement. Besides the traditional methods, Hirschmuller proposed a semi-global matching method [11] and gave a systematic postprocessing strategy [1], in which a method to distinguish occluded and mismatched pixels was proposed. Although the disparity map can be somewhat improved with the methods above, very often there are still some outliers on the refined disparity map, especially for the disparities near object boundaries. In this letter, we propose a new disparity refinement approach to refine the false disparities near object boundaries. In our method, color images are involved to guide the w- hole refinement pipeline. We define the outliers near object boundary as boundary-inconsistent regions, consisting of fattening regions [1] and narrowing regions. Firstly, we investigate the origins of boundary-inconsistent regions. Then, the boundary-inconsistent regions are detected with a hybridsuperpixel based approach proposed in this letter. Finally, a modified weighted median filtering scheme is proposed to refine these detected outliers. Experimental results on disparity maps computed with various stereo matching methods and depth maps obtained with Kinect demonstrate the effectiveness of our proposed method. The letter is organized as follows. Section presents the proposed method in detail; section 3 gives the experimental results on various disparity maps and depth maps; and finally, this letter is concluded in section. II. PROPOSED METHOD Fig.1 gives the pipeline of the proposed method. The input is initial disparity map (or depth map) either computed with stereo matching methods or captured with depth sensors. Firstly, the initial disparity map is preprocessed to eliminate dark regions. Secondly, Canny operator is utilized to detect the edges in disparity map and a hybrid-superpixel method is proposed to segment the color image, both the above results are utilized to detect the boundary-inconsistent regions. Finally, a modified weighted median filtering strategy is utilized to refine the detected outliers. In the following paragraphs, why and how to detect and refine the boundary-inconsistent regions are described in detail respectively. A. Origins of Boundary-inconsistent Regions After the traditional post-processing, very often there are still many outliers around the object boundaries in the disparity map. Such outliers are mainly caused by the mismatching near
 and narrowing region (circle) handling.")
 p reference window reference window p 1 correct match wrong match correct match wrong match Fig. 3. Examples for fattening effect and narrowing effect.")

![((b) was generated by the CostFilter[7] without its median filter postprocessing).](/docs-images/79/80023556/images/2-4.jpg "The fattening region (marked with red square) is a convex region with outliers spilling out of the object boundary; while the narrowing region (marked with red circle) is a concave one.")
,")


). These regions are corrected beforehand by the proposed preprocessing step.")
2 > TCSVT < Dark region refinement Canny edge detection Initial disparity/depth map "Boundary-inconsistent region" detection Modified weighted median filtering Refined disparity map Hybrid superpixel Fig. 1. Pipeline of the proposed disparity refinement method. Fig.. Fattening region (square) and narrowing region (circle) handling. (a) Color image; (b) disparity map; (c) outlier patches; (d) refined patches. Fig.. (a) Disparity maps (a) before and (b) after dark region refinement. (b) p reference window reference window p 1 correct match wrong match correct match wrong match Fig. 3. Examples for fattening effect and narrowing effect. Left and right are the reference image and the target image respectively. depth discontinuities. We define the regions containing this kind of outliers as boundary-inconsistent regions. As far as we observed, the boundary-inconsistent regions can be divided into two categories: fattening region [1] and narrowing region, which are shown in Fig. ((b) was generated by the CostFilter[7] without its median filter postprocessing). The fattening region (marked with red square) is a convex region with outliers spilling out of the object boundary; while the narrowing region (marked with red circle) is a concave one. Fattening effect is caused by the homogeneous background near depth boundary. As shown in Fig.3, the background near the right border of the head in the target image is occluded in the reference image, and the matching for pixel p 1 in the target image is assigned to a wrong pixel (red one), thus p 1 is assigned with a larger disparity than the ground truth. While the narrowing effect is caused by homogeneous foreground, such as the foreground pixel p in Fig.3, which is wrongly assigned with a smaller disparity than the ground truth. B. Boundary-inconsistent Regions Detection We define inconsistent boundary as the edge on disparity map which is inconsistent with the border of the corresponding object in the scene. Thus the inconsistent boundary on a dis- parity map can be detected by checking whether its collocated edge crosses a segment in the color image. 1) Preprocessing: In the initial disparity map, there may be some regions with abnormal disparities, and these regions tend to affect the disparity edge detection. We name this kind of region as dark region (Fig.(a)). These regions are corrected beforehand by the proposed preprocessing step. Firstly, we assign a disparity with low confidence if it is smaller than a threshold ρ d M, where ρ and d M represent the penalty ratio (ρ is set as 1/7 in this letter) and maximum disparity value respectively; otherwise, the disparity is assigned with high confidence. Disparity with low confidence is likely to be an outlier. Furtherly, if the disparity with low confidence is also much smaller than its neighbors, it s labeled as a hole, which is described as follows: { 1, d(p) < d(q)/ hole(p) = (1), otherwise Where d(p) and d(q) denote the disparities of pixel p and q respectively. p is q s nearest neighbor with high confident disparity. When hole(p) is true, pixel p is with abnormal disparity, and those abnormal disparities make up the dark regions in disparity map. Each detected dark region is corrected by the disparities of its neighbors. When a dark region is on the image boundary, the traditional filling method using smaller disparity (background) tends to cause dark fill dark effect. Thus in this case, we use the larger disparity (foreground) to fill the dark region as follows: { d(p min{d(q1 ), d(q ) = )}, hole(q 1 ) hole(q )= () max{d(q 1 ), d(q )}, hole(q 1 ) hole(q )=1 where q 1 and q are the nearest pixels on each side of pixel p with high confident disparities (if exist), and the refined disparity is denoted by d(p ). This process is conducted in both horizontal and vertical directions. The refined disparity
, from which we can see dark regions (in red circles) on the disparity map have been well corrected.")

![Traditional color image segmentation is usually based on mean-shift segmentation [13] or other graph-based segmentation [1]. However, such algorithms have a high computational complexity.](/docs-images/79/80023556/images/3-3.jpg "Since what we care in this case is the object boundary, a more efficient superpixel based method of SLIC [1] is used here for the segmentation.")


![Then for the under-segmented superpixel, meanshift [13] is utilized to further segment it into several regions. The segmentation result with the proposed hybrid superpixel method is shown in Fig.](/docs-images/79/80023556/images/3-6.jpg "(c), in which the colorful regions are the under-segmented superpixels further refined with meanshift.")
![In addition, to find out the most suitable superpixel size, we perform a trial on the Middlebury dataset [1].](/docs-images/79/80023556/images/3-7.jpg "The number of pixels within each superpixel versus the average error percentage of disparity is shown in Fig.")

3 Average Error Percentage (%) > TCSVT < nonocc all disc Fig.. method. (a) (b) (c) (a) color image, (b) superpixels with SLIC, (c) segments with our map is shown in Fig.(b), from which we can see dark regions (in red circles) on the disparity map have been well corrected. ) Hybrid Superpixel Segmentation: After the preprocessing, the remaining outliers are mainly near object boundaries. In order to refine such regions, we use the segment information from color image together with disparity edge information to detect them. Traditional color image segmentation is usually based on mean-shift segmentation [13] or other graph-based segmentation [1]. However, such algorithms have a high computational complexity. Since what we care in this case is the object boundary, a more efficient superpixel based method of SLIC [1] is used here for the segmentation. The SLIC algorithm adheres to boundaries, and it is fast and memory efficient. One example of segment results is shown in Fig.(b). However, although most segments adhere to object boundaries, there are still some regions not well segmented. Thus, based on SLIC, we propose the following method to further refine the segmentation. First the segments not well adhered are detected by the following voting technique. The pixels in each superpixel are divided into five bins according to their gray values:, 1, 1 1, 11 3, 31. If the bin with the largest number of pixels contains less than % of the total pixels in the superpixel, this superpixel is regarded as undersegmented. Then for the under-segmented superpixel, meanshift [13] is utilized to further segment it into several regions. The segmentation result with the proposed hybrid superpixel method is shown in Fig.(c), in which the colorful regions are the under-segmented superpixels further refined with meanshift. In addition, to find out the most suitable superpixel size, we perform a trial on the Middlebury dataset [1]. The number of pixels within each superpixel versus the average error percentage of disparity is shown in Fig.. We can see that superpixel size has little influence on the result, and in our experiments we set the superpixel size at which gives the minimum error percentage. We also detect the edges in the disparity map with Canny edge detector [17]. We label a disparity edge as an inconsistent boundary if its collocated edge is not aligned with the corresponding segment border (crosses a segment) in color image. 3) Inconsistent Regions Detection: Boundary-inconsistent region is the outlier region lies on one side of the inconsistent boundary. For fattening region, it lies on the foreground side [1], while for narrowing region it lies on the background side. Thus a judgment is demanded to decide on which side the boundary-inconsistent region lies. Here, we label it by means of checking-window, as shown in Fig.7. At each point Fig.. 1 original Pixels per Superpixel Determination on superpixel size. (a) (c) Fig. 7. (a) Fattening region detection and (b) narrowing region detection. d 1 and d are two areas in the checking-window with different disparities. (c) and (d): size changing of the adaptive checking-window. (red point) along the inconsistent boundary, a square checkingwindow is formed to detect the boundary-inconsistent region. The radius r (half of the width) of the checking-window is set as the minimum distance from the window center to each border of the segment in four directions: r = min{d l, d r, d t, d b } (3) where d l, d r, d t, d b denote the distances in left, right, top and bottom directions respectively (denoted by the green lines in Fig.7(a)). Fig.7 illustrates the complete detection process. Two correct segments, foreground segment A and background segment B are circled with blue dotted line in both Fig.7(a) and Fig.7(b), and the fattening effect and narrowing effect occur on region A in Fig.7(a) and Fig.7(b) respectively. The inconsistent boundary which crosses region B in Fig.7(a) and A in Fig.7(b) is detected firstly. Then checking-window is applied on the inconsistent boundary. The checking-window is divided into two sides by the inconsistent boundary, and normally the boundary-inconsistent region lies on the side with smaller area (i.e., d 1 in Fig.7(a) or d in Fig.7(b)), since in most cases, outliers region occupies less area of one segment. If not all the pixels on inconsistent boundary give the same conclusion, the majority conclusion is set as the final one. (b) (d)
4 Average Error Percentage (%) Average Error Percentage (%) > TCSVT < If the area of d 1 equals to that of d (Fig.7(c)) exactly, the size of the checking-window will increase until the areas of d 1 and d are different, as shown in Fig.7(d). C. Boundary-inconsistent Regions Refinement In our method, we propose a new modified weighted median (MWM) filter based on binocular guided color images to refine the boundary-inconsistent region. The proposed MWM filter is inspired by the constant time weighted median (CTWM) filter [1]. Compared to the traditional median filter (O(r ), where r is the filter size), CTWM is much more efficient (O(1)). In CTWM filter, guided filter [1] weights were used as the filter weights [1]. However, for disparity refinement, there are two images from different views of one scene, thus more information can be utilized. In this letter, we use both of the two views as the guided color images, like the symmetric guided filter mentioned in [7]. In our MWM filter, symmetric guided filter weights [7] are used as the filter weights, so that the information from both views can be utilized, especially the edge information. The process is shown in Fig., in which (a) and (b) are the disparity maps before and after MWM filtering. First, (a) is divided into several slices, in which each slice represents a disparity level, and the content is just the part with that disparity level in (a), as shown in (b). Then for each disparity slice, MWM filter is applied on the boundaryinconsistent regions, as shown in (c). Finally, the filtered slices are combined together to obtain the refined disparity map (d). III. EXPERIMENTAL RESULTS In this section, our proposed method is tested on disparity/depth maps obtained with various methods, and also compared with other state-of-the-art disparity refinement methods. A. Test on Disparity Maps from Stereo Matching 1) Experimental Settings: Local Methods. The framework of [7] is utilized for the local methods, which consists of a truncated AD-gradient cost measure, a guided filter cost aggregation, and an initial post-processing composed of a leftright check and a weighted median filter. But the cost measure and aggregation are replaced by different strategies in two subexperiments: In the first sub-experiment, we fix the cost aggregation and use five most widely used cost functions for the cost computation: absolute difference (AD), gradient, census, truncated AD-gradient [7], and AD-census []; In the second sub-experiment, we fix the cost function and choose the following five representative aggregation methods for the cost aggregation: box filter, guided filter [7], cross region [], information permeability [], and domain transform aggregation [19]. Global Methods. We also test our refinement scheme on global methods. The traditional graph-cut based stereo matching [] and stereo matching using belief propagation [3] are selected in this letter. Related parameters are set as the same as in these methods. Test image pairs (Tsukuba, Venus, Teddy, Cones) from the Middlebury dataset [1] are used in the above experiments nonocc AD gradient census ADG ADCensus all AD gradient census ADG ADCensus disc AD gradient census ADG ADCensus nonocc Box Guided Cross IP DTAggr all Box Guided Cross IP DTAggr disc.77.9 Box Guided Cross IP DTAggr Fig. 9. Experimental evaluation on different cost measures and aggregation methods Fig. 1. Graph-Cut nonocc all disc Belief Propagation nonocc all disc Refinement results on Graph cut and Belief propagation. Metrics of nonocc, all, and disc are calculated for the four image pairs, representing non-occluded region, all region, and the region near discontinuities, respectively. ) Results and Analysis: Fig.9 gives the average error percentage of local methods over the four Middlebury pairs before and after applying the proposed disparity refinement method. The left side and right side represent different cost measures and different aggregations respectively. It is worth noting that all of these test cases have been already postprocessed by a weighted median filter with bilateral weights [7] beforehand. As shown in Fig.9, all the disparity maps are improved over all of the three metrics by our proposed method. Experimental results on global methods are shown in Fig.1, which also validate the effectiveness of our method. The above experimental results show that even with the state-of-the-art cost measures, aggregation strategies, or postprocessing methods, there are still some outliers in the disparity map. And these outliers, especially those near disparity boundaries, are well refined by the proposed refinement method. An average of 1% improvement can be obtained over all the test cases, which also indicates the importance of disparity refinement for stereo matching. 3) Comparison with Other Refinement Methods: We also compare our proposed method with state-of-the-art disparity refinement methods: CTWM [1], FattenHandl [], Vote [], jointbf [] and jointtf [1]. The initial disparity maps are generated by [7], without its disparity refinement step. The above methods are used to refine the initial disparity maps respectively. The visual results and the average error percentage results over the Middlebury dataset are shown in Fig. 11 and Table. I respectively. We can see that our proposed method performs the best among all these methods. Besides, 19.
 (c) (d) Fig.")

 disparity")
")






")











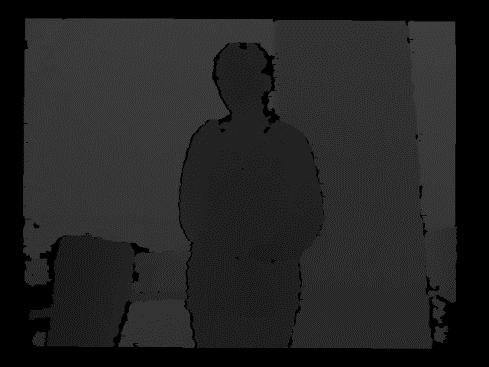









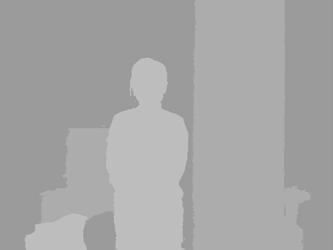


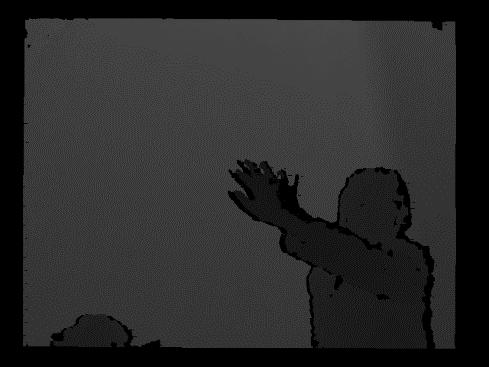

5 > TCSVT < MWM Filter (a) (b) (c) (d) Fig.. Modified weighted median filtering process. (a) original disparity map, (b) disparity slices, (c) filtered disparity slices, (d) refined disparity map. Initial CTWM FattenHandl Vote jointbf jointtf Proposed Fig. 1. RGB depth map disparity scale refined map Experimental results on depth maps obtained with Kinect. Fig. 11. Comparison with other refinement methods. TABLE I COMPUTATIONAL TIME (S) AND AVERAGE ERROR PERCENTAGE (%) COMPARISON CTWM FattenHandl Vote jointbf jointtf Proposed Time Error Percentage the computational time for image Tsukuba (3 with disparity level 1) is shown in Table. I. The computational complexity of our method is on the similar level with those of CTWM, FattenHand1 and Vote, and the MWM filtering process of our method has a high parallelism, which can be easily accelerated on GPU-like platform. B. Test on Depth Maps from Kinect Kinect is an active 3D scanner composed of a laser device, a laser feeder, and an RGB camera. Depth map can be acquired by laser scanning. However, there are many outliers in the initial depth maps as shown in Fig.1. As the depth map is too dark and hard to see the content, we first convert the depth to disparity by disparity=- depth (except depth=), and scale it by. for better view. And since only one color view can be acquired by Kinect, the guided image in the MWM filter is set to single color image. Then our proposed method is applied on the disparity scales derived from the Kinect dataset. The visual results before and after using our method are shown in Fig.13. We can see that both the dark regions and boundary-inconsistent regions are well refined by our method. IV. CONCLUSION In this letter, we proposed a new disparity refinement method. Dark regions were removed with the proposed preprocessing step, boundary-inconsistent regions were detected
6 > TCSVT < by utilizing color image segmentation results, and a hybrid superpixel method is also proposed to improve the segmentation. A modified weighted median filter was proposed to correct the boundary-inconsistent regions. With our method, the outliers in disparity maps, especially outliers near object boundaries were well refined. Experimental results on disparity maps computed with various stereo matching methods demonstrated the effectiveness of our method. In addition, the depth maps captured with Kinect-like depth sensors were also greatly improved with our method. [19] C. C. Pham and J. W. Jeon, Domain transformation-based efficient cost aggregation for local stereo matching, IEEE Trans. Circuits Syst. Video Technol., vol. 3, no. 7, pp , Jul. 13. [] G. Petschnigg, R. Szeliski, M. Agrawala, M. Cohen, H. Hoppe, and K. Toyama, Digital photography with flash and no-flash image pairs, ACM Trans. on Graphics, vol. 3, no. 3, pp. 7, Aug.. [1] K. H. Lo, Y. C. F. Wang, and K. L. Hua, Joint trilateral filtering for depth map super-resolution, in Proc. IEEE Conf. VCIP, 13, pp. 1. ACKNOWLEDGEMENT Thanks to National Science Foundation of China 13711, 11, China 3 project of 1AA19, Shenzhen Peacock Plan and Fundamental Research Project for funding. REFERENCES [1] D. Scharstein, R. Szeliski, and R. Zabih, A taxonomy and evaluation of dense two-frame stereo correspondence algorithms, in Proc. IEEE Workshop SMBW, 1, pp [] Y. Boykov, O. Veksler, and R. Zabih, Fast approximate energy minimization via graph cuts, IEEE Trans. Pattern Anal. Machine Intell., vol. 3, no. 11, pp , Nov. 1. [3] P. Felzenszwalb and D. Huttenlocher, Efficient belief propagation for early vision, in Proc. IEEE Conf. CVPR,, pp. 1. [] X. Mei, X. Sun, M. Zhou, S. Jiao, H. Wang, and X. Zhang, On building an accurate stereo matching system on graphics hardware, in Proc. IEEE Workshop ICCV, 11, pp [] K. Zhang, J. Lu, and G. Lafruit, Cross-based local stereo matching using orthogonal integral images, IEEE Trans. Circuits Syst. Video Technol., vol. 19, no. 7, pp , Jul. 9. [] C. Cigla and A. A. Alatan, Information permeability for stereo matching, Signal Processing: Image Communication, vol., no. 9, pp. 17 1, Oct. 13. [7] C. Rhemann, A. Hosni, M. Bleyer, C. Rother, and M. Gelautz, Fast cost-volume filtering for visual correspondence and beyond, in Proc. IEEE Conf. CVPR, 11, pp [] Y.-C. Wang, C.-P. Tung, and P.-C. Chung, Efficient disparity estimation using hierarchical bilateral disparity structure based graph cut algorithm with a foreground boundary refinement mechanism, IEEE Trans. Circuits Syst. Video Technol., vol. 3, no., pp. 7 1, May 13. [9] Q. Yang, A non-local cost aggregation method for stereo matching, in Proc. IEEE Conf. CVPR, 1, pp [1] Z. Ma, K. He, Y. Wei, J. Sun, and E. Wu, Constant time weighted median filtering for stereo matching and beyond, in Proc. IEEE Conf. ICCV, 13, pp. 9. [11] H. Hirschmuller, Accurate and efficient stereo processing by semiglobal matching and mutual information, in Proc. IEEE Conf. CVPR,, pp [1] H. Hirschmuller, Stereo processing by semiglobal matching and mutual information, IEEE Trans. Pattern Anal. Machine Intell., vol. 3, no., pp. 3 31, Feb.. [13] D. Comaniciu and P. Meer, Mean shift: a robust approach toward feature space analysis, IEEE Trans. Pattern Anal. Machine Intell., vol., no., pp. 3 19, May. [1] P. Felzenszwalb and D. Huttenlocher, Efficient graph-based image segmentation, Intl J. Computer Vision, vol. 9, no., pp , Sept.. [1] R. Achanta, A. Shaji, K. Smith, A. Lucchi, P. Fua, and S. Susstrunk, SLIC superpixels compared to state-of-the-art superpixel methods, IEEE Trans. Pattern Anal. Machine Intell., vol. 3, no. 11, pp. 7, Nov. 1. [1] D. Scharstein and R. Szeliski, Middlebury stereo vision page [online], Available: [17] J. Canny, A computational approach to edge detection, IEEE Trans. Pattern Anal. Machine Intell., vol. PAMI-, no., pp. 79 9, Nov. 19. [1] K. He, J. Sun, and X. Tang, Guided image filtering, in Proc. ECCV, 1, pp. 1 1.
Stereo Matching with Reliable Disparity Propagation
 Stereo Matching with Reliable Disparity Propagation Xun Sun, Xing Mei, Shaohui Jiao, Mingcai Zhou, Haitao Wang Samsung Advanced Institute of Technology, China Lab Beijing, China xunshine.sun,xing.mei,sh.jiao,mingcai.zhou,ht.wang@samsung.com
Stereo Matching with Reliable Disparity Propagation Xun Sun, Xing Mei, Shaohui Jiao, Mingcai Zhou, Haitao Wang Samsung Advanced Institute of Technology, China Lab Beijing, China xunshine.sun,xing.mei,sh.jiao,mingcai.zhou,ht.wang@samsung.com
segments. The geometrical relationship of adjacent planes such as parallelism and intersection is employed for determination of whether two planes sha
 A New Segment-based Stereo Matching using Graph Cuts Daolei Wang National University of Singapore EA #04-06, Department of Mechanical Engineering Control and Mechatronics Laboratory, 10 Kent Ridge Crescent
A New Segment-based Stereo Matching using Graph Cuts Daolei Wang National University of Singapore EA #04-06, Department of Mechanical Engineering Control and Mechatronics Laboratory, 10 Kent Ridge Crescent
On Building an Accurate Stereo Matching System on Graphics Hardware
 On Building an Accurate Stereo Matching System on Graphics Hardware Xing Mei 1,2, Xun Sun 1, Mingcai Zhou 1, Shaohui Jiao 1, Haitao Wang 1, Xiaopeng Zhang 2 1 Samsung Advanced Institute of Technology,
On Building an Accurate Stereo Matching System on Graphics Hardware Xing Mei 1,2, Xun Sun 1, Mingcai Zhou 1, Shaohui Jiao 1, Haitao Wang 1, Xiaopeng Zhang 2 1 Samsung Advanced Institute of Technology,
A FAST SEGMENTATION-DRIVEN ALGORITHM FOR ACCURATE STEREO CORRESPONDENCE. Stefano Mattoccia and Leonardo De-Maeztu
 A FAST SEGMENTATION-DRIVEN ALGORITHM FOR ACCURATE STEREO CORRESPONDENCE Stefano Mattoccia and Leonardo De-Maeztu University of Bologna, Public University of Navarre ABSTRACT Recent cost aggregation strategies
A FAST SEGMENTATION-DRIVEN ALGORITHM FOR ACCURATE STEREO CORRESPONDENCE Stefano Mattoccia and Leonardo De-Maeztu University of Bologna, Public University of Navarre ABSTRACT Recent cost aggregation strategies
Linear stereo matching
 Linear stereo matching Leonardo De-Maeztu 1 Stefano Mattoccia 2 Arantxa Villanueva 1 Rafael Cabeza 1 1 Public University of Navarre Pamplona, Spain 2 University of Bologna Bologna, Italy {leonardo.demaeztu,avilla,rcabeza}@unavarra.es
Linear stereo matching Leonardo De-Maeztu 1 Stefano Mattoccia 2 Arantxa Villanueva 1 Rafael Cabeza 1 1 Public University of Navarre Pamplona, Spain 2 University of Bologna Bologna, Italy {leonardo.demaeztu,avilla,rcabeza}@unavarra.es
Temporally Consistence Depth Estimation from Stereo Video Sequences
 Temporally Consistence Depth Estimation from Stereo Video Sequences Ji-Hun Mun and Yo-Sung Ho (&) School of Information and Communications, Gwangju Institute of Science and Technology (GIST), 123 Cheomdangwagi-ro,
Temporally Consistence Depth Estimation from Stereo Video Sequences Ji-Hun Mun and Yo-Sung Ho (&) School of Information and Communications, Gwangju Institute of Science and Technology (GIST), 123 Cheomdangwagi-ro,
MACHINE VISION APPLICATIONS. Faculty of Engineering Technology, Technology Campus, Universiti Teknikal Malaysia Durian Tunggal, Melaka, Malaysia
 Journal of Fundamental and Applied Sciences ISSN 1112-9867 Research Article Special Issue Available online at http://www.jfas.info DISPARITY REFINEMENT PROCESS BASED ON RANSAC PLANE FITTING FOR MACHINE
Journal of Fundamental and Applied Sciences ISSN 1112-9867 Research Article Special Issue Available online at http://www.jfas.info DISPARITY REFINEMENT PROCESS BASED ON RANSAC PLANE FITTING FOR MACHINE
Bilateral and Trilateral Adaptive Support Weights in Stereo Vision
 Cost -based In GPU and Support Weights in Vision Student, Colorado School of Mines rbeethe@mines.edu April 7, 2016 1 / 36 Overview Cost -based In GPU 1 Cost 2 3 -based 4 In GPU 2 / 36 Cost -based In GPU
Cost -based In GPU and Support Weights in Vision Student, Colorado School of Mines rbeethe@mines.edu April 7, 2016 1 / 36 Overview Cost -based In GPU 1 Cost 2 3 -based 4 In GPU 2 / 36 Cost -based In GPU
Fast Stereo Matching using Adaptive Window based Disparity Refinement
 Avestia Publishing Journal of Multimedia Theory and Applications (JMTA) Volume 2, Year 2016 Journal ISSN: 2368-5956 DOI: 10.11159/jmta.2016.001 Fast Stereo Matching using Adaptive Window based Disparity
Avestia Publishing Journal of Multimedia Theory and Applications (JMTA) Volume 2, Year 2016 Journal ISSN: 2368-5956 DOI: 10.11159/jmta.2016.001 Fast Stereo Matching using Adaptive Window based Disparity
A Near Real-Time Color Stereo Matching Method for GPU
 A Near Real-Time Color Stereo Matching Method for GPU Naiyu Zhang, Hongjian Wang, Jean-Charles Créput, Julien Moreau and Yassine Ruichek IRTES-SeT, Université de Technologie de Belfort-Montbéliard, Belfort,
A Near Real-Time Color Stereo Matching Method for GPU Naiyu Zhang, Hongjian Wang, Jean-Charles Créput, Julien Moreau and Yassine Ruichek IRTES-SeT, Université de Technologie de Belfort-Montbéliard, Belfort,
A novel heterogeneous framework for stereo matching
 A novel heterogeneous framework for stereo matching Leonardo De-Maeztu 1, Stefano Mattoccia 2, Arantxa Villanueva 1 and Rafael Cabeza 1 1 Department of Electrical and Electronic Engineering, Public University
A novel heterogeneous framework for stereo matching Leonardo De-Maeztu 1, Stefano Mattoccia 2, Arantxa Villanueva 1 and Rafael Cabeza 1 1 Department of Electrical and Electronic Engineering, Public University
Segment-Tree based Cost Aggregation for Stereo Matching
 Segment-Tree based Cost Aggregation for Stereo Matching Xing Mei 1, Xun Sun 2, Weiming Dong 1, Haitao Wang 2, Xiaopeng Zhang 1 1 NLPR, Institute of Automation, Chinese Academy of Sciences, Beijing, China
Segment-Tree based Cost Aggregation for Stereo Matching Xing Mei 1, Xun Sun 2, Weiming Dong 1, Haitao Wang 2, Xiaopeng Zhang 1 1 NLPR, Institute of Automation, Chinese Academy of Sciences, Beijing, China
Stereo Matching: An Outlier Confidence Approach
 Stereo Matching: An Outlier Confidence Approach Li Xu and Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {xuli,leojia}@cse.cuhk.edu.hk Abstract. One of the
Stereo Matching: An Outlier Confidence Approach Li Xu and Jiaya Jia Department of Computer Science and Engineering The Chinese University of Hong Kong {xuli,leojia}@cse.cuhk.edu.hk Abstract. One of the
Real-Time Disparity Map Computation Based On Disparity Space Image
 Real-Time Disparity Map Computation Based On Disparity Space Image Nadia Baha and Slimane Larabi Computer Science Department, University of Science and Technology USTHB, Algiers, Algeria nbahatouzene@usthb.dz,
Real-Time Disparity Map Computation Based On Disparity Space Image Nadia Baha and Slimane Larabi Computer Science Department, University of Science and Technology USTHB, Algiers, Algeria nbahatouzene@usthb.dz,
Data Term. Michael Bleyer LVA Stereo Vision
 Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Improving the accuracy of fast dense stereo correspondence algorithms by enforcing local consistency of disparity fields
 Improving the accuracy of fast dense stereo correspondence algorithms by enforcing local consistency of disparity fields Stefano Mattoccia University of Bologna Dipartimento di Elettronica, Informatica
Improving the accuracy of fast dense stereo correspondence algorithms by enforcing local consistency of disparity fields Stefano Mattoccia University of Bologna Dipartimento di Elettronica, Informatica
Segmentation Based Stereo. Michael Bleyer LVA Stereo Vision
 Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
Supplementary Material for ECCV 2012 Paper: Extracting 3D Scene-consistent Object Proposals and Depth from Stereo Images
 Supplementary Material for ECCV 2012 Paper: Extracting 3D Scene-consistent Object Proposals and Depth from Stereo Images Michael Bleyer 1, Christoph Rhemann 1,2, and Carsten Rother 2 1 Vienna University
Supplementary Material for ECCV 2012 Paper: Extracting 3D Scene-consistent Object Proposals and Depth from Stereo Images Michael Bleyer 1, Christoph Rhemann 1,2, and Carsten Rother 2 1 Vienna University
Real-time Global Stereo Matching Using Hierarchical Belief Propagation
 1 Real-time Global Stereo Matching Using Hierarchical Belief Propagation Qingxiong Yang 1 Liang Wang 1 Ruigang Yang 1 Shengnan Wang 2 Miao Liao 1 David Nistér 1 1 Center for Visualization and Virtual Environments,
1 Real-time Global Stereo Matching Using Hierarchical Belief Propagation Qingxiong Yang 1 Liang Wang 1 Ruigang Yang 1 Shengnan Wang 2 Miao Liao 1 David Nistér 1 1 Center for Visualization and Virtual Environments,
Real-Time High-Quality Stereo Vision System in FPGA Wenqiang Wang, Jing Yan, Ningyi Xu, Yu Wang, Senior Member, IEEE, and Feng-Hsiung Hsu
 1696 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 25, NO. 10, OCTOBER 2015 Real-Time High-Quality Stereo Vision System in FPGA Wenqiang Wang, Jing Yan, Ningyi Xu, Yu Wang, Senior
1696 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 25, NO. 10, OCTOBER 2015 Real-Time High-Quality Stereo Vision System in FPGA Wenqiang Wang, Jing Yan, Ningyi Xu, Yu Wang, Senior
A Symmetric Patch-Based Correspondence Model for Occlusion Handling
 A Symmetric Patch-Based Correspondence Model for Occlusion Handling Yi Deng Qiong Yang Xueyin Lin Xiaoou Tang dengyi00@mails.tsinghua.edu.cn qyang@microsoft.com lxy-dcs@mail.tsinghua.edu.cn xitang@microsoft.com
A Symmetric Patch-Based Correspondence Model for Occlusion Handling Yi Deng Qiong Yang Xueyin Lin Xiaoou Tang dengyi00@mails.tsinghua.edu.cn qyang@microsoft.com lxy-dcs@mail.tsinghua.edu.cn xitang@microsoft.com
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
Fusing Color and Texture Features for Stereo Matching
 Proceeding of the IEEE International Conference on Information and Automation Yinchuan, China, August 2013 Fusing Color and Texture Features for Stereo Matching Yaolin Hou, Jian Yao, Bing Zhou, and Yaping
Proceeding of the IEEE International Conference on Information and Automation Yinchuan, China, August 2013 Fusing Color and Texture Features for Stereo Matching Yaolin Hou, Jian Yao, Bing Zhou, and Yaping
Probabilistic Correspondence Matching using Random Walk with Restart
 C. OH, B. HAM, K. SOHN: PROBABILISTIC CORRESPONDENCE MATCHING 1 Probabilistic Correspondence Matching using Random Walk with Restart Changjae Oh ocj1211@yonsei.ac.kr Bumsub Ham mimo@yonsei.ac.kr Kwanghoon
C. OH, B. HAM, K. SOHN: PROBABILISTIC CORRESPONDENCE MATCHING 1 Probabilistic Correspondence Matching using Random Walk with Restart Changjae Oh ocj1211@yonsei.ac.kr Bumsub Ham mimo@yonsei.ac.kr Kwanghoon
Reliability Based Cross Trilateral Filtering for Depth Map Refinement
 Reliability Based Cross Trilateral Filtering for Depth Map Refinement Takuya Matsuo, Norishige Fukushima, and Yutaka Ishibashi Graduate School of Engineering, Nagoya Institute of Technology Nagoya 466-8555,
Reliability Based Cross Trilateral Filtering for Depth Map Refinement Takuya Matsuo, Norishige Fukushima, and Yutaka Ishibashi Graduate School of Engineering, Nagoya Institute of Technology Nagoya 466-8555,
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
A Locally Linear Regression Model for Boundary Preserving Regularization in Stereo Matching
 A Locally Linear Regression Model for Boundary Preserving Regularization in Stereo Matching Shengqi Zhu 1, Li Zhang 1, and Hailin Jin 2 1 University of Wisconsin - Madison 2 Adobe Systems Incorporated
A Locally Linear Regression Model for Boundary Preserving Regularization in Stereo Matching Shengqi Zhu 1, Li Zhang 1, and Hailin Jin 2 1 University of Wisconsin - Madison 2 Adobe Systems Incorporated
Towards a Simulation Driven Stereo Vision System
 Towards a Simulation Driven Stereo Vision System Martin Peris Cyberdyne Inc., Japan Email: martin peris@cyberdyne.jp Sara Martull University of Tsukuba, Japan Email: info@martull.com Atsuto Maki Toshiba
Towards a Simulation Driven Stereo Vision System Martin Peris Cyberdyne Inc., Japan Email: martin peris@cyberdyne.jp Sara Martull University of Tsukuba, Japan Email: info@martull.com Atsuto Maki Toshiba
Depth SEEDS: Recovering Incomplete Depth Data using Superpixels
 Depth SEEDS: Recovering Incomplete Depth Data using Superpixels Michael Van den Bergh 1 1 ETH Zurich Zurich, Switzerland vamichae@vision.ee.ethz.ch Daniel Carton 2 2 TU München Munich, Germany carton@lsr.ei.tum.de
Depth SEEDS: Recovering Incomplete Depth Data using Superpixels Michael Van den Bergh 1 1 ETH Zurich Zurich, Switzerland vamichae@vision.ee.ethz.ch Daniel Carton 2 2 TU München Munich, Germany carton@lsr.ei.tum.de
PatchMatch Stereo - Stereo Matching with Slanted Support Windows
 M. BLEYER, C. RHEMANN, C. ROTHER: PATCHMATCH STEREO 1 PatchMatch Stereo - Stereo Matching with Slanted Support Windows Michael Bleyer 1 bleyer@ims.tuwien.ac.at Christoph Rhemann 1 rhemann@ims.tuwien.ac.at
M. BLEYER, C. RHEMANN, C. ROTHER: PATCHMATCH STEREO 1 PatchMatch Stereo - Stereo Matching with Slanted Support Windows Michael Bleyer 1 bleyer@ims.tuwien.ac.at Christoph Rhemann 1 rhemann@ims.tuwien.ac.at
Accurate Disparity Estimation Based on Integrated Cost Initialization
 Sensors & Transducers 203 by IFSA http://www.sensorsportal.com Accurate Disparity Estimation Based on Integrated Cost Initialization Haixu Liu, 2 Xueming Li School of Information and Communication Engineering,
Sensors & Transducers 203 by IFSA http://www.sensorsportal.com Accurate Disparity Estimation Based on Integrated Cost Initialization Haixu Liu, 2 Xueming Li School of Information and Communication Engineering,
Hierarchical Belief Propagation To Reduce Search Space Using CUDA for Stereo and Motion Estimation
 Hierarchical Belief Propagation To Reduce Search Space Using CUDA for Stereo and Motion Estimation Scott Grauer-Gray and Chandra Kambhamettu University of Delaware Newark, DE 19716 {grauerg, chandra}@cis.udel.edu
Hierarchical Belief Propagation To Reduce Search Space Using CUDA for Stereo and Motion Estimation Scott Grauer-Gray and Chandra Kambhamettu University of Delaware Newark, DE 19716 {grauerg, chandra}@cis.udel.edu
STEREO matching is a method for estimating a depth map
 FPGA mplementation of a Memory-Efficient Stereo Vision Algorithm Based on 1- Guided Filtering Yuki Sanada, Katsuki Ohata, Tetsuro Ogaki, Kento Matsuyama, Takanori Ohira, Satoshi Chikuda, Masaki garashi,
FPGA mplementation of a Memory-Efficient Stereo Vision Algorithm Based on 1- Guided Filtering Yuki Sanada, Katsuki Ohata, Tetsuro Ogaki, Kento Matsuyama, Takanori Ohira, Satoshi Chikuda, Masaki garashi,
Disparity Search Range Estimation: Enforcing Temporal Consistency
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Disparity Search Range Estimation: Enforcing Temporal Consistency Dongbo Min, Sehoon Yea, Zafer Arican, Anthony Vetro TR1-13 April 1 Abstract
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Disparity Search Range Estimation: Enforcing Temporal Consistency Dongbo Min, Sehoon Yea, Zafer Arican, Anthony Vetro TR1-13 April 1 Abstract
Improved depth map estimation in Stereo Vision
 Improved depth map estimation in Stereo Vision Hajer Fradi and and Jean-Luc Dugelay EURECOM, Sophia Antipolis, France ABSTRACT In this paper, we present a new approach for dense stereo matching which is
Improved depth map estimation in Stereo Vision Hajer Fradi and and Jean-Luc Dugelay EURECOM, Sophia Antipolis, France ABSTRACT In this paper, we present a new approach for dense stereo matching which is
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
A novel 3D torso image reconstruction procedure using a pair of digital stereo back images
 Modelling in Medicine and Biology VIII 257 A novel 3D torso image reconstruction procedure using a pair of digital stereo back images A. Kumar & N. Durdle Department of Electrical & Computer Engineering,
Modelling in Medicine and Biology VIII 257 A novel 3D torso image reconstruction procedure using a pair of digital stereo back images A. Kumar & N. Durdle Department of Electrical & Computer Engineering,
Stereo Correspondence with Occlusions using Graph Cuts
 Stereo Correspondence with Occlusions using Graph Cuts EE368 Final Project Matt Stevens mslf@stanford.edu Zuozhen Liu zliu2@stanford.edu I. INTRODUCTION AND MOTIVATION Given two stereo images of a scene,
Stereo Correspondence with Occlusions using Graph Cuts EE368 Final Project Matt Stevens mslf@stanford.edu Zuozhen Liu zliu2@stanford.edu I. INTRODUCTION AND MOTIVATION Given two stereo images of a scene,
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
3D RECONSTRUCTION FROM STEREO/ RANGE IMAGES
 University of Kentucky UKnowledge University of Kentucky Master's Theses Graduate School 2007 3D RECONSTRUCTION FROM STEREO/ RANGE IMAGES Qingxiong Yang University of Kentucky, qyang2@uky.edu Click here
University of Kentucky UKnowledge University of Kentucky Master's Theses Graduate School 2007 3D RECONSTRUCTION FROM STEREO/ RANGE IMAGES Qingxiong Yang University of Kentucky, qyang2@uky.edu Click here
Filter Flow: Supplemental Material
 Filter Flow: Supplemental Material Steven M. Seitz University of Washington Simon Baker Microsoft Research We include larger images and a number of additional results obtained using Filter Flow [5]. 1
Filter Flow: Supplemental Material Steven M. Seitz University of Washington Simon Baker Microsoft Research We include larger images and a number of additional results obtained using Filter Flow [5]. 1
Performance of Stereo Methods in Cluttered Scenes
 Performance of Stereo Methods in Cluttered Scenes Fahim Mannan and Michael S. Langer School of Computer Science McGill University Montreal, Quebec H3A 2A7, Canada { fmannan, langer}@cim.mcgill.ca Abstract
Performance of Stereo Methods in Cluttered Scenes Fahim Mannan and Michael S. Langer School of Computer Science McGill University Montreal, Quebec H3A 2A7, Canada { fmannan, langer}@cim.mcgill.ca Abstract
Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation
 ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
Joint Histogram Based Cost Aggregation for Stereo Matching
 IEEE TRANSACTION ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 Joint Histogram Based Cost Aggregation for Stereo Matching Dongbo Min, Member, IEEE, Jiangbo Lu, Member, IEEE, and Minh N. Do, Senior Member,
IEEE TRANSACTION ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 Joint Histogram Based Cost Aggregation for Stereo Matching Dongbo Min, Member, IEEE, Jiangbo Lu, Member, IEEE, and Minh N. Do, Senior Member,
An Implementation of Spatial Algorithm to Estimate the Focus Map from a Single Image
 An Implementation of Spatial Algorithm to Estimate the Focus Map from a Single Image Yen-Bor Lin and Chung-Ping Young Department of Computer Science and Information Engineering National Cheng Kung University
An Implementation of Spatial Algorithm to Estimate the Focus Map from a Single Image Yen-Bor Lin and Chung-Ping Young Department of Computer Science and Information Engineering National Cheng Kung University
CONVOLUTIONAL COST AGGREGATION FOR ROBUST STEREO MATCHING. Somi Jeong Seungryong Kim Bumsub Ham Kwanghoon Sohn
 CONVOLUTIONAL COST AGGREGATION FOR ROBUST STEREO MATCHING Somi Jeong Seungryong Kim Bumsub Ham Kwanghoon Sohn School of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea E-mail: khsohn@yonsei.ac.kr
CONVOLUTIONAL COST AGGREGATION FOR ROBUST STEREO MATCHING Somi Jeong Seungryong Kim Bumsub Ham Kwanghoon Sohn School of Electrical and Electronic Engineering, Yonsei University, Seoul, Korea E-mail: khsohn@yonsei.ac.kr
A locally global approach to stereo correspondence
 A locally global approach to stereo correspondence Stefano Mattoccia Department of Electronics Computer Science and Systems (DEIS) Advanced Research Center on Electronic Systems (ARCES) University of Bologna,
A locally global approach to stereo correspondence Stefano Mattoccia Department of Electronics Computer Science and Systems (DEIS) Advanced Research Center on Electronic Systems (ARCES) University of Bologna,
A Novel Segment-based Stereo Matching Algorithm for Disparity Map Generation
 2011 International Conference on Computer and Software Modeling IPCSIT vol.14 (2011) (2011) IACSIT Press, Singapore A Novel Segment-based Stereo Matching Algorithm for Disparity Map Generation Viral H.
2011 International Conference on Computer and Software Modeling IPCSIT vol.14 (2011) (2011) IACSIT Press, Singapore A Novel Segment-based Stereo Matching Algorithm for Disparity Map Generation Viral H.
IMPLEMENTATION OF THE CONTRAST ENHANCEMENT AND WEIGHTED GUIDED IMAGE FILTERING ALGORITHM FOR EDGE PRESERVATION FOR BETTER PERCEPTION
 IMPLEMENTATION OF THE CONTRAST ENHANCEMENT AND WEIGHTED GUIDED IMAGE FILTERING ALGORITHM FOR EDGE PRESERVATION FOR BETTER PERCEPTION Chiruvella Suresh Assistant professor, Department of Electronics & Communication
IMPLEMENTATION OF THE CONTRAST ENHANCEMENT AND WEIGHTED GUIDED IMAGE FILTERING ALGORITHM FOR EDGE PRESERVATION FOR BETTER PERCEPTION Chiruvella Suresh Assistant professor, Department of Electronics & Communication
Segmentation-based Disparity Plane Fitting using PSO
 , pp.141-145 http://dx.doi.org/10.14257/astl.2014.47.33 Segmentation-based Disparity Plane Fitting using PSO Hyunjung, Kim 1, Ilyong, Weon 2, Youngcheol, Jang 3, Changhun, Lee 4 1,4 Department of Computer
, pp.141-145 http://dx.doi.org/10.14257/astl.2014.47.33 Segmentation-based Disparity Plane Fitting using PSO Hyunjung, Kim 1, Ilyong, Weon 2, Youngcheol, Jang 3, Changhun, Lee 4 1,4 Department of Computer
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
A Performance Study on Different Cost Aggregation Approaches Used in Real-Time Stereo Matching
 International Journal of Computer Vision 75(2), 283 296, 2007 c 2007 Springer Science + Business Media, LLC. Manufactured in the United States. DOI: 10.1007/s11263-006-0032-x A Performance Study on Different
International Journal of Computer Vision 75(2), 283 296, 2007 c 2007 Springer Science + Business Media, LLC. Manufactured in the United States. DOI: 10.1007/s11263-006-0032-x A Performance Study on Different
Near real-time Fast Bilateral Stereo on the GPU
 Near real-time Fast Bilateral Stereo on the GPU Stefano Mattoccia DEIS - ARCES University of Bologna stefano.mattoccia@unibo.it Marco Viti DEIS University of Bologna vitimar@gmail.com Florian Ries ARCES
Near real-time Fast Bilateral Stereo on the GPU Stefano Mattoccia DEIS - ARCES University of Bologna stefano.mattoccia@unibo.it Marco Viti DEIS University of Bologna vitimar@gmail.com Florian Ries ARCES
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Input. Output. Problem Definition. Rectified stereo image pair All correspondences lie in same scan lines
 Problem Definition 3 Input Rectified stereo image pair All correspondences lie in same scan lines Output Disparity map of the reference view Foreground: large disparity Background: small disparity Matching
Problem Definition 3 Input Rectified stereo image pair All correspondences lie in same scan lines Output Disparity map of the reference view Foreground: large disparity Background: small disparity Matching
Stereo Vision II: Dense Stereo Matching
 Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
A Constant-Space Belief Propagation Algorithm for Stereo Matching
 A Constant-Space Belief Propagation Algorithm for Stereo Matching Qingxiong Yang Liang Wang Narendra Ahuja University of Illinois at Urbana Champaign University of Kentucky http://vision.ai.uiuc.edu/ qyang6/
A Constant-Space Belief Propagation Algorithm for Stereo Matching Qingxiong Yang Liang Wang Narendra Ahuja University of Illinois at Urbana Champaign University of Kentucky http://vision.ai.uiuc.edu/ qyang6/
Graph Cut based Continuous Stereo Matching using Locally Shared Labels
 Graph Cut based Continuous Stereo Matching using Locally Shared Labels Tatsunori Taniai University of Tokyo, Japan taniai@iis.u-tokyo.ac.jp Yasuyuki Matsushita Microsoft Research Asia, China yasumat@microsoft.com
Graph Cut based Continuous Stereo Matching using Locally Shared Labels Tatsunori Taniai University of Tokyo, Japan taniai@iis.u-tokyo.ac.jp Yasuyuki Matsushita Microsoft Research Asia, China yasumat@microsoft.com
Stereo Vision in Structured Environments by Consistent Semi-Global Matching
 Stereo Vision in Structured Environments by Consistent Semi-Global Matching Heiko Hirschmüller Institute of Robotics and Mechatronics Oberpfaffenhofen German Aerospace Center (DLR), 82230 Wessling, Germany.
Stereo Vision in Structured Environments by Consistent Semi-Global Matching Heiko Hirschmüller Institute of Robotics and Mechatronics Oberpfaffenhofen German Aerospace Center (DLR), 82230 Wessling, Germany.
Perceptual Grouping from Motion Cues Using Tensor Voting
 Perceptual Grouping from Motion Cues Using Tensor Voting 1. Research Team Project Leader: Graduate Students: Prof. Gérard Medioni, Computer Science Mircea Nicolescu, Changki Min 2. Statement of Project
Perceptual Grouping from Motion Cues Using Tensor Voting 1. Research Team Project Leader: Graduate Students: Prof. Gérard Medioni, Computer Science Mircea Nicolescu, Changki Min 2. Statement of Project
Power Line Detect System Based on Stereo Vision and FPGA. Xiao Zhou, Xiaoliang Zheng, Kejun Ou
 2017 2nd International Conference on Image, Vision and Computing Power Line Detect System Based on Stereo Vision and FPGA Xiao Zhou, Xiaoliang Zheng, Kejun Ou School of Mechanical and Electronic Engineering
2017 2nd International Conference on Image, Vision and Computing Power Line Detect System Based on Stereo Vision and FPGA Xiao Zhou, Xiaoliang Zheng, Kejun Ou School of Mechanical and Electronic Engineering
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Near Real-Time Stereo Matching Using Geodesic Diffusion
 410 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 34, NO. 2, FEBRUARY 2012 Near Real-Time Stereo Matching Using Geodesic Diffusion Leonardo De-Maeztu, Arantxa Villanueva, Member,
410 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 34, NO. 2, FEBRUARY 2012 Near Real-Time Stereo Matching Using Geodesic Diffusion Leonardo De-Maeztu, Arantxa Villanueva, Member,
In ICIP 2017, Beijing, China MONDRIAN STEREO. Middlebury College Middlebury, VT, USA
 In ICIP 2017, Beijing, China MONDRIAN STEREO Dylan Quenneville Daniel Scharstein Middlebury College Middlebury, VT, USA ABSTRACT Untextured scenes with complex occlusions still present challenges to modern
In ICIP 2017, Beijing, China MONDRIAN STEREO Dylan Quenneville Daniel Scharstein Middlebury College Middlebury, VT, USA ABSTRACT Untextured scenes with complex occlusions still present challenges to modern
Image Guided Cost Aggregation for Hierarchical Depth Map Fusion
 Image Guided Cost Aggregation for Hierarchical Depth Map Fusion Thilo Borgmann and Thomas Sikora Communication Systems Group, Technische Universität Berlin {borgmann, sikora}@nue.tu-berlin.de Keywords:
Image Guided Cost Aggregation for Hierarchical Depth Map Fusion Thilo Borgmann and Thomas Sikora Communication Systems Group, Technische Universität Berlin {borgmann, sikora}@nue.tu-berlin.de Keywords:
EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES
 EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES J. Liu 1, S. Ji 1,*, C. Zhang 1, Z. Qin 1 1 School of Remote Sensing and Information Engineering, Wuhan University,
EVALUATION OF DEEP LEARNING BASED STEREO MATCHING METHODS: FROM GROUND TO AERIAL IMAGES J. Liu 1, S. Ji 1,*, C. Zhang 1, Z. Qin 1 1 School of Remote Sensing and Information Engineering, Wuhan University,
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
A layered stereo matching algorithm using image segmentation and global visibility constraints
 ISPRS Journal of Photogrammetry & Remote Sensing 59 (2005) 128 150 www.elsevier.com/locate/isprsjprs A layered stereo matching algorithm using image segmentation and global visibility constraints Michael
ISPRS Journal of Photogrammetry & Remote Sensing 59 (2005) 128 150 www.elsevier.com/locate/isprsjprs A layered stereo matching algorithm using image segmentation and global visibility constraints Michael
Evaluation of Stereo Algorithms for 3D Object Recognition
 Evaluation of Stereo Algorithms for 3D Object Recognition Federico Tombari Fabio Gori Luigi Di Stefano DEIS/ARCES - University of Bologna, Bologna, Italy federico.tombari@unibo.it fabio.gori2@studio.unibo.it
Evaluation of Stereo Algorithms for 3D Object Recognition Federico Tombari Fabio Gori Luigi Di Stefano DEIS/ARCES - University of Bologna, Bologna, Italy federico.tombari@unibo.it fabio.gori2@studio.unibo.it
Adaptive Support-Weight Approach for Correspondence Search
 650 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 28, NO. 4, APRIL 2006 Adaptive Support-Weight Approach for Correspondence Search Kuk-Jin Yoon, Student Member, IEEE, and In So Kweon,
650 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 28, NO. 4, APRIL 2006 Adaptive Support-Weight Approach for Correspondence Search Kuk-Jin Yoon, Student Member, IEEE, and In So Kweon,
Asymmetric 2 1 pass stereo matching algorithm for real images
 455, 057004 May 2006 Asymmetric 21 pass stereo matching algorithm for real images Chi Chu National Chiao Tung University Department of Computer Science Hsinchu, Taiwan 300 Chin-Chen Chang National United
455, 057004 May 2006 Asymmetric 21 pass stereo matching algorithm for real images Chi Chu National Chiao Tung University Department of Computer Science Hsinchu, Taiwan 300 Chin-Chen Chang National United
CONTENTS. High-Accuracy Stereo Depth Maps Using Structured Light. Yeojin Yoon
 [Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
[Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
Reference Point Detection for Arch Type Fingerprints
 Reference Point Detection for Arch Type Fingerprints H.K. Lam 1, Z. Hou 1, W.Y. Yau 1, T.P. Chen 1, J. Li 2, and K.Y. Sim 2 1 Computer Vision and Image Understanding Department Institute for Infocomm Research,
Reference Point Detection for Arch Type Fingerprints H.K. Lam 1, Z. Hou 1, W.Y. Yau 1, T.P. Chen 1, J. Li 2, and K.Y. Sim 2 1 Computer Vision and Image Understanding Department Institute for Infocomm Research,
arxiv: v2 [cs.cv] 20 Oct 2015
![arxiv: v2 [cs.cv] 20 Oct 2015](/thumbs/75/72634031.jpg "arxiv: v2 [cs.cv] 20 Oct 2015") Computing the Stereo Matching Cost with a Convolutional Neural Network Jure Žbontar University of Ljubljana jure.zbontar@fri.uni-lj.si Yann LeCun New York University yann@cs.nyu.edu arxiv:1409.4326v2 [cs.cv]
Computing the Stereo Matching Cost with a Convolutional Neural Network Jure Žbontar University of Ljubljana jure.zbontar@fri.uni-lj.si Yann LeCun New York University yann@cs.nyu.edu arxiv:1409.4326v2 [cs.cv]
Scene Segmentation by Color and Depth Information and its Applications
 Scene Segmentation by Color and Depth Information and its Applications Carlo Dal Mutto Pietro Zanuttigh Guido M. Cortelazzo Department of Information Engineering University of Padova Via Gradenigo 6/B,
Scene Segmentation by Color and Depth Information and its Applications Carlo Dal Mutto Pietro Zanuttigh Guido M. Cortelazzo Department of Information Engineering University of Padova Via Gradenigo 6/B,
Stereo Vision Based Image Maching on 3D Using Multi Curve Fitting Algorithm
 Stereo Vision Based Image Maching on 3D Using Multi Curve Fitting Algorithm 1 Dr. Balakrishnan and 2 Mrs. V. Kavitha 1 Guide, Director, Indira Ganesan College of Engineering, Trichy. India. 2 Research
Stereo Vision Based Image Maching on 3D Using Multi Curve Fitting Algorithm 1 Dr. Balakrishnan and 2 Mrs. V. Kavitha 1 Guide, Director, Indira Ganesan College of Engineering, Trichy. India. 2 Research
SCALP: Superpixels with Contour Adherence using Linear Path
 SCALP: Superpixels with Contour Adherence using Linear Path Rémi Giraud 1,2 remi.giraud@labri.fr with Vinh-Thong Ta 1 and Nicolas Papadakis 2 1 LaBRI CNRS UMR 5800 - University of Bordeaux, FRANCE PICTURA
SCALP: Superpixels with Contour Adherence using Linear Path Rémi Giraud 1,2 remi.giraud@labri.fr with Vinh-Thong Ta 1 and Nicolas Papadakis 2 1 LaBRI CNRS UMR 5800 - University of Bordeaux, FRANCE PICTURA
LEARNING-BASED DEPTH ESTIMATION FROM 2D IMAGES USING GIST AND SALIENCY. José L. Herrera Janusz Konrad Carlos R. del-bianco Narciso García
 LEARNING-BASED DEPTH ESTIMATION FROM 2D IMAGES USING GIST AND SALIENCY José L. Herrera Janusz Konrad Carlos R. del-bianco Narciso García ABSTRACT Although there has been a significant proliferation of
LEARNING-BASED DEPTH ESTIMATION FROM 2D IMAGES USING GIST AND SALIENCY José L. Herrera Janusz Konrad Carlos R. del-bianco Narciso García ABSTRACT Although there has been a significant proliferation of
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Stereo Video Processing for Depth Map
 Stereo Video Processing for Depth Map Harlan Hile and Colin Zheng University of Washington Abstract This paper describes the implementation of a stereo depth measurement algorithm in hardware on Field-Programmable
Stereo Video Processing for Depth Map Harlan Hile and Colin Zheng University of Washington Abstract This paper describes the implementation of a stereo depth measurement algorithm in hardware on Field-Programmable
SWITCHING DUAL KERNELS FOR SEPARABLE EDGE-PRESERVING FILTERING. Norishige Fukushima, Shu Fujita and Yutaka Ishibashi
 SWITCHING DUAL KERNELS FOR SEPARABLE EDGE-PRESERVING FILTERING Norishige Fukushima, Shu Fujita and Yutaka Ishibashi Graduate School of Engineering, Nagoya Institute of Technology ABSTRACT In this paper,
SWITCHING DUAL KERNELS FOR SEPARABLE EDGE-PRESERVING FILTERING Norishige Fukushima, Shu Fujita and Yutaka Ishibashi Graduate School of Engineering, Nagoya Institute of Technology ABSTRACT In this paper,
Short Papers. Joint Histogram-Based Cost Aggregation for Stereo Matching 1 INTRODUCTION 2 RELATED WORK AND MOTIVATION
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 35, NO. 10, OCTOBER 2013 2539 Short Papers Joint Histogram-Based Cost Aggregation for Stereo Matching Dongbo Min, Member, IEEE, Jiangbo
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 35, NO. 10, OCTOBER 2013 2539 Short Papers Joint Histogram-Based Cost Aggregation for Stereo Matching Dongbo Min, Member, IEEE, Jiangbo
A Constant-Space Belief Propagation Algorithm for Stereo Matching
 A Constant-Space Belief Propagation Algorithm for Stereo Matching Qingxiong Yang Liang Wang Narendra Ahuja University of Illinois at Urbana Champaign University of Kentucky http://vision.ai.uiuc.edu/ qyang6/
A Constant-Space Belief Propagation Algorithm for Stereo Matching Qingxiong Yang Liang Wang Narendra Ahuja University of Illinois at Urbana Champaign University of Kentucky http://vision.ai.uiuc.edu/ qyang6/
Global Stereo Matching Leveraged by Sparse Ground Control Points
 Global Stereo Matching Leveraged by Sparse Ground Control Points Liang Wang Ruigang Yang Center for Visualization and Virtual Environments, University of Kentucky 329 Rose Street, Lexington, KY, 40506-0633,
Global Stereo Matching Leveraged by Sparse Ground Control Points Liang Wang Ruigang Yang Center for Visualization and Virtual Environments, University of Kentucky 329 Rose Street, Lexington, KY, 40506-0633,
EUSIPCO
 EUSIPCO 2013 1569743475 EFFICIENT DISPARITY CALCULATION BASED ON STEREO VISION WITH GROUND OBSTACLE ASSUMPTION Zhen Zhang, Xiao Ai, and Naim Dahnoun Department of Electrical and Electronic Engineering
EUSIPCO 2013 1569743475 EFFICIENT DISPARITY CALCULATION BASED ON STEREO VISION WITH GROUND OBSTACLE ASSUMPTION Zhen Zhang, Xiao Ai, and Naim Dahnoun Department of Electrical and Electronic Engineering
Efficient quality enhancement of disparity maps based on alpha matting
 Efficient quality enhancement of disparity maps based on alpha matting Nicole Brosch a, Matej Nezveda a, Margrit Gelautz a and Florian Seitner b a Institute of Software Technology and Interactive Systems,
Efficient quality enhancement of disparity maps based on alpha matting Nicole Brosch a, Matej Nezveda a, Margrit Gelautz a and Florian Seitner b a Institute of Software Technology and Interactive Systems,
SALIENT OBJECT DETECTION FOR RGB-D IMAGE VIA SALIENCY EVOLUTION.
 SALIENT OBJECT DETECTION FOR RGB-D IMAGE VIA SALIENCY EVOLUTION Jingfan Guo,2, Tongwei Ren,2,, Jia Bei,2 State Key Laboratory for Novel Software Technology, Nanjing University, China 2 Software Institute,
SALIENT OBJECT DETECTION FOR RGB-D IMAGE VIA SALIENCY EVOLUTION Jingfan Guo,2, Tongwei Ren,2,, Jia Bei,2 State Key Laboratory for Novel Software Technology, Nanjing University, China 2 Software Institute,
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Comparison of Graph Cuts with Belief Propagation for Stereo, using Identical MRF Parameters
 Comparison of Graph Cuts with Belief Propagation for Stereo, using Identical MRF Parameters Marshall F. Tappen William T. Freeman Computer Science and Artificial Intelligence Laboratory Massachusetts Institute
Comparison of Graph Cuts with Belief Propagation for Stereo, using Identical MRF Parameters Marshall F. Tappen William T. Freeman Computer Science and Artificial Intelligence Laboratory Massachusetts Institute
Computer Vision I - Basics of Image Processing Part 2
 Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Stereo under Sequential Optimal Sampling: A Statistical Analysis Framework for Search Space Reduction
 Stereo under Sequential Optimal Sampling: A Statistical Analysis Framework for Search Space Reduction Yilin Wang, Ke Wang, Enrique Dunn, Jan-Michael Frahm University of North Carolina at Chapel Hill {ylwang,kewang,dunn,jmf}@cs.unc.edu
Stereo under Sequential Optimal Sampling: A Statistical Analysis Framework for Search Space Reduction Yilin Wang, Ke Wang, Enrique Dunn, Jan-Michael Frahm University of North Carolina at Chapel Hill {ylwang,kewang,dunn,jmf}@cs.unc.edu
Segment-based Stereo Matching Using Graph Cuts
 Segment-based Stereo Matching Using Graph Cuts Li Hong George Chen Advanced System Technology San Diego Lab, STMicroelectronics, Inc. li.hong@st.com george-qian.chen@st.com Abstract In this paper, we present
Segment-based Stereo Matching Using Graph Cuts Li Hong George Chen Advanced System Technology San Diego Lab, STMicroelectronics, Inc. li.hong@st.com george-qian.chen@st.com Abstract In this paper, we present
Recognition of Object Contours from Stereo Images: an Edge Combination Approach
 Recognition of Object Contours from Stereo Images: an Edge Combination Approach Margrit Gelautz and Danijela Markovic Institute for Software Technology and Interactive Systems, Vienna University of Technology
Recognition of Object Contours from Stereo Images: an Edge Combination Approach Margrit Gelautz and Danijela Markovic Institute for Software Technology and Interactive Systems, Vienna University of Technology
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
SPM-BP: Sped-up PatchMatch Belief Propagation for Continuous MRFs. Yu Li, Dongbo Min, Michael S. Brown, Minh N. Do, Jiangbo Lu
 SPM-BP: Sped-up PatchMatch Belief Propagation for Continuous MRFs Yu Li, Dongbo Min, Michael S. Brown, Minh N. Do, Jiangbo Lu Discrete Pixel-Labeling Optimization on MRF 2/37 Many computer vision tasks
SPM-BP: Sped-up PatchMatch Belief Propagation for Continuous MRFs Yu Li, Dongbo Min, Michael S. Brown, Minh N. Do, Jiangbo Lu Discrete Pixel-Labeling Optimization on MRF 2/37 Many computer vision tasks
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
A Local Iterative Refinement Method for Adaptive Support-Weight Stereo Matching
 A Local Iterative Refinement Method for Adaptive Support-Weight Stereo Matching Eric T. Psota, Jędrzej Kowalczuk, Jay Carlson, and Lance C. Pérez Department of Electrical Engineering, University of Nebraska,
A Local Iterative Refinement Method for Adaptive Support-Weight Stereo Matching Eric T. Psota, Jędrzej Kowalczuk, Jay Carlson, and Lance C. Pérez Department of Electrical Engineering, University of Nebraska,
2.1 Image Segmentation
 3rd International Conference on Multimedia Technology(ICMT 2013) Fast Adaptive Depth Estimation Algorithm Based on K-means Segmentation Xin Dong 1, Guozhong Wang, Tao Fan, Guoping Li, Haiwu Zhao, Guowei
3rd International Conference on Multimedia Technology(ICMT 2013) Fast Adaptive Depth Estimation Algorithm Based on K-means Segmentation Xin Dong 1, Guozhong Wang, Tao Fan, Guoping Li, Haiwu Zhao, Guowei