An Automatic Hole Filling Method of Point Cloud for 3D Scanning
|
|
|
- Arnold Todd
- 5 years ago
- Views:
Transcription

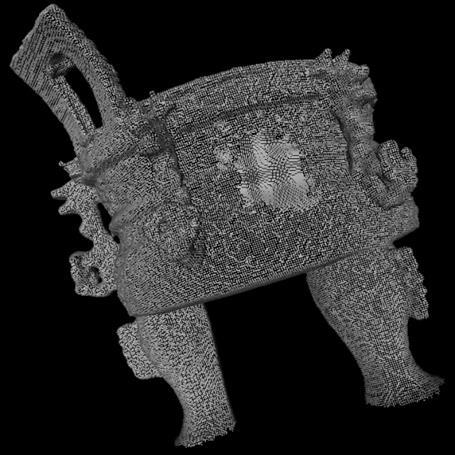
1 An Automatic Hole Filling Method of Point Cloud for 3D Scanning Yuta MURAKI Osaka Institute of Technology Osaka, Japan Koji NISHIO Osaka Institute of Technology Osaka, Japan Takayuki KANAYA Hiroshima International University Hiroshima, Japan Ken-ichi KOBORI Osaka Institute of Technology Osaka, Japan ABSTRACT In recent years, due to the development of three-dimensional scanning technology, the opportunities for real objects to be three-dimensionally measured, taken into the PC as point cloud data, and used for various contents are increasing. However, the point cloud data obtained by three-dimensional scanning has many problems such as data loss due to occlusion or the material of the object to be measured, and occurrence of noise. Therefore, it is necessary to edit the point cloud data obtained by scanning. Particularly, since the point cloud data obtained by scanning contains many data missing, it takes much time to fill holes. Therefore, we propose a method to automatically filling hole obtained by three-dimensional scanning. In our method, a surface is generated from a point in the vicinity of a hole, and a hole region is filled by generating a point sequence on the surface. This method is suitable for processing to fill a large number of holes because point sequence interpolation can be performed automatically for hole regions without requiring user input. Keywords Hole filling, 3D Scanning, Surface Approximation, Point Cloud 1. INTRODUCTION In recent years, due to the development of three dimensional scanning technology, the opportunities for real objects to be three-dimensionally measured, taken into the PC as point cloud data, and used for various contents are increasing. In three-dimensional scanning, data of the entire surroundings of the scanning object is acquired by generally measuring the scanning object from a plurality of directions and aligning the obtained plural point group data. In Figure 1, the point cloud data obtained from a plurality of directions are displayed in a color-coded manner, and one model data is constructed by Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, or republish, to post on servers or to redistribute to lists, requires prior specific permission and/or a fee. Figure 1. The point cloud data obtained from three-dimensional measurement. integrating them. However, the point cloud data obtained by threedimensional scanning has many problems such as data loss due to occlusion and the material of the object to be measured, and occurrence of noise. Therefore, it is necessary to edit point cloud data obtained by scanning. Especially, since the point cloud data obtained by scanning contains many data missing, it takes a huge amount of time to fill holes.
 is generated from the neighboring point of the missing region and the region is expanded.")

2 (a) Selection of point group (b) Projection to OBB plane Therefore, we propose a method to automatically fill hole of point cloud data obtained by threedimensional scanning. In this method, the bounding box (OBB) is generated from the neighboring point of the missing region and the region is expanded. After that, a point group included in the expanded bounding box is extracted and approximated to generate a B- spline surface. Then, a point sequence is generated on the generated B-spline surface and interpolation is performed by deleting other than the portion corresponding to the missing. This method is suitable for processing to fill a large number of holes because point group interpolation can be performed automatically for hole regions without requiring user input. 2. RELATED WORK The hole filling method of point cloud data is roughly divided into the following three types. 1. Method of interpolating using a database[1,2]. 2. Method of interpolating using the shape information of the entire model[3,4]. 3. Method of interpolating using the surrounding shape[5-11]. The method [1, 2] of interpolating using a database is a method of selecting a shape similar to the target object from the database and integrating it with the target object. In these methods, there is a problem that it is costly because a shape similar to the target object needs to be modeled and stored in advance. As a method of using the shape information of the entire model, a method of copying an area having the maximum degree of similarity of shape and texture has been proposed [3, 4]. However, in method [3], hole is filled with one copy. Therefore, when there is no similar shape of the same size as the hole in the model, it is an interpolation result which is liable to cause discomfort. In the method [4], interpolation of the hole is performed by copying a shape with the minimum energy function by using similarity of shape and (c) Extracting sample Figure 2. Procedure for generating a closed area. (d) Generate closed region Figure 3. Piecewise linear approximation. texture. In this method, there are problems that the parameters are determined manually and that the interpolation result depends greatly on the parameters. In addition, there is a problem that these methods [3, 4] commonly have high calculation cost. The method [5-11] that uses surrounding shapes for interpolation is a method of performing smooth interpolation by using differential equations and surface fitting. In these methods, good results can be obtained for small hole regions. In particular, the method [9] is also applicable to complex hole regions with "islands". However, when large hole regions are filled, there are cases where shapes greatly different in the properties of three-dimensional structures are generated. If the area of the hole is larger, these method produce plane based results. 3. PROPOSED METHOD We propose a hole filling method based on surface approximation. In our method, by approximating neighboring of a hole region, a surface covering a hole region is generated and an interpolation point is generated. In the proposed method, the control point is obtained so that the error between the surface to be generated and the point representing the outline of the hole is small, so it is possible to calculate an interpolation point with relatively high accuracy. In addition, since the continuity with the point group around the hole is taken into consideration, the interpolation are small in gap with input point cloud.
.")
![First, as shown by the red dots in the Figure 2 (a), near the missing region representing the outline of the hole are extracted from the input point cloud by using based on Gerhard's method [12].](/docs-images/89/98372742/images/3-2.jpg "Then, a bounding box (OBB) of the extracted is generated. Then using the vector obtained by PCA (principal component analysis), the area is expanded by expanding the generated OBB to the outside.")
3 (a) Calculation of internal control point (b) Refine the surface (c) On-surface point control point generation Figure 4. Curved surface and interpolation point generation 3.1. Selection of point group In this section, a method of extracting a point group used for surface approximation will be described with using a part of the input point cloud shown in Figure 2 (a). First, as shown by the red dots in the Figure 2 (a), near the missing region representing the outline of the hole are extracted from the input point cloud by using based on Gerhard's method [12]. Then, a bounding box (OBB) of the extracted is generated. Then using the vector obtained by PCA (principal component analysis), the area is expanded by expanding the generated OBB to the outside. In this method, as shown by blue dots in the Figure 2 (a), a point group included in the expanded OBB is extracted from the input point cloud as a point group to be used for fitting a surface Surface fitting In this section, we describe a method to automatically generate a surface by using point group extracted in Section Generation of boundary curve We describe the generation of a boundary curve of a fitted B-spline surface. First, as shown by the red dots in Figure 2 (b), neighbor of each plane constituting the expanded OBB are extracted from the point group obtained in Section 3.1. Next, as shown by the red line in the Figure 2 (b), the extracted neighboring point of the OBB plane is projected onto the OBB plane to generate a new point sequence indicated in blue. After that, a sequence of is extracted based on piecewise linear approximation from a number of blue on the OBB plane. As shown in Figure 3, piecewise linear approximation is a method of approximating a point sequence with line segments and repeating recursive division until the distance d of the point farthest from the line segment is within the threshold ε. As a result, characteristic can be extracted. The extraction result is indicated by red dots in Figure 2 (c). The point sequence obtained as described above is approximated by a B-spline curve. (d) Interpolation point generation The four generated B-spline curves are independent each other, and the end are not connected. Therefore, four neighboring B-spline curves are connected by extracting the neighboring of the line segment representing the four corners of the OBB one by one and adding it to the control point of the B-spline curve. Then, as shown in Figure 2 (d), a closed quadrilateral region is generated Calculate internal control of surface As shown in Figure 4 (a), using the B-spline curve generated in Section and the point group obtained in Section 3.1, the internal control of the B-spline surface are calculated by the least squares method. The generated control of B- spline surface is indicated by blue in Figure 4 (a). The generated polygons of B-spline surface is indicated by black in Figure 4 (a) Refinement of internal control Since the curved surface generated by this method is an approximation of a point group, the center part of the surface region where the hole exists generally has low accuracy. Therefore, the accuracy of the interpolation point is improved by recalculating the internal control so that the error of the hole neighborhood point becomes small. Polygons of B- spline surface and the surface control after the refinement processing are indicated by red in Figure 4 (b) Generate interpolation As shown in Figure 4 (c), a point sequence is generated on the generated B-spline surface. In order to eliminate discomfort to the input point cloud, the interval of the generated point sequence is calculated by the ratio of the length in the u and v direction of the generated quadrilateral region. After that, as shown by green dots in Figure 4 (d), distance from the generated surface are extracted and set as interpolation. This method is not influenced by the outline shape of the missing region.
4 Data Set #Original #Vicinity Table 1. Accuracy evaluation #Fill #New #control error (%) time (sec.) Data A 4, , Data B 4, , Data C 4, , Data D 9, , Data E 2, , Data F 4,375 1, , Data G 8,854 1, , Data H 8,349 1, , Data I 22,093 5,607 1,888 23, In other words, it can also be applied to complex holes such as including "island" [9] where exist inside the hole. 4. EXPERIMENTAL RESULTS In order to verify the effectiveness of this method, accuracy and processing time were measured by applying this method by generating holes for randomly generated surface shapes. After that, we applied this method to actual scan data and verified the usefulness of the method. For the experiment, we used a desktop PC with Core i7 (3.4 GHz) and 8GB Application to experimental data Figure 5 shows the results of applying our method to nine point cloud data including hole. Gray are point cloud with hole, and green are interpolation. Also, the generated B-spline surface is indicated by black polygons Accuracy evaluation In this section, shape evaluation of the generated interpolation will be described. In order to verify the accuracy, the distance between the generated interpolation and the true value (surface) was measured. Table 1 shows the results of shape evaluation. Vicinity in Table 1 are the used for surface generation. Fill are interpolation generated by our method. Error indicates the accuracy of the interpolation and is the value obtained the average of the distance between the interpolation generated by our method and the true value (surface), and normalizing by the bounding box size. As shown in Table 1, it was confirmed that the error of the interpolation is less than 1%, and approximation can be performed with good precision. In addition, the processing time is less than 1 second, and practicality is also proved Application to actual scanning data Figure 6 shows the results of applying our method to scanning data obtained from a 3D scanner. Figures 6 (a), (c) and (e) are input data including hole, and (b), (d) and (f) are the result of applying the method. We can see that interpolation that maintains the shape features is possible. 5. CONCLUSIONS In this paper, we proposed a hole filling method for point cloud based on surface approximation. In this method, a point group to be used for approximation is extracted by enlarging a region from a hole neighbor point, and it is possible to automatically generate an interpolation point. Moreover, by using refined outline information and performing refinement processing so that the accuracy of the interpolation point is high, high precision hole filling was made possible. We applied our method to the hole region including concavities and convexes and confirmed that high precision and high speed interpolation is possible. In addition, applying our method to actual scanning data, we confirmed that it is possible to fill hole without feeling uncomfortable. It is difficult to apply our method to the part where the point near the hole becomes irregular like the base of the handle. In addition, if the area where the are missing is none smooth then our method may not produce satisfactory results. Therefore, adaptation to more shapes can be cited as future works. Further improvement of the accuracy of the interpolation point can be cited as future works. 6. ACKNOWLEDGMENTS This work was supported by JSPS KAKENHI Grant Number JP 17K13571.
![7. REFERENCES [1] V. Kraevoy and A. Sheffer, "Template-based mesh completion", Proc. Eurographics Symp.](/docs-images/89/98372742/images/5-0.jpg "On Geometry Processing, pp.13-22, 2005. [2] M.Pauly, \"Example-based 3D scan completion\", Proc.")
![Eurographics Symp. On Geometry Processing, pp.23-32, 2005. [3] S. Park, X. Guo, H. Shin, H.](/docs-images/89/98372742/images/5-1.jpg "Qin, \"Shape and Appearance Repair for Incomplete Point Surfaces\", Proc. ICCV, Vol. 2, pp.1260-1267, 2005.")
![[4] N. Kawai, A. Zakhor, T. Sato, N.](/docs-images/89/98372742/images/5-2.jpg "Yokoya, \"Surface Completion of Shape and Texture Based on Energy Minimization\", Proc. ICIP, pp.")
![913-916, 2011. [5] J. Verdera, V. Caselles, M. Bertalmio and G. Sapiro, "Inpainting surface holes", Proc.](/docs-images/89/98372742/images/5-3.jpg "Int. Conf. on Image Processing, Vol.2, pp.903-906, 2003. [6] P. Liepa, \"Filling Holes in Meshes.")
![Symposium on Geometry Processing", pp.200-205, 2003. [7] J. Wang, M.](/docs-images/89/98372742/images/5-4.jpg "M. Oliveira, \"Filling holes on locally smooth surfaces reconstructed from point clouds\", Image and Vision")
![Computing, Vol.25, Issue.1, pp.103-113, 2007. [8] E. Altantsetseg, Y. Muraki, F. Chiba and K.](/docs-images/89/98372742/images/5-5.jpg "Konno, \"3D Surface Reconstruction of Stone Tools by Using Four-Directional Measurement Machine\", The")
![International Journal of Virtual Reality (IJVR), Vol.10, No.1, pp.37-43, 2011. [9] E. Altantsetseg, K.](/docs-images/89/98372742/images/5-6.jpg "Matsuyama and K.")


5 7. REFERENCES [1] V. Kraevoy and A. Sheffer, "Template-based mesh completion", Proc. Eurographics Symp. On Geometry Processing, pp.13-22, [2] M.Pauly, "Example-based 3D scan completion", Proc. Eurographics Symp. On Geometry Processing, pp.23-32, [3] S. Park, X. Guo, H. Shin, H. Qin, "Shape and Appearance Repair for Incomplete Point Surfaces", Proc. ICCV, Vol. 2, pp , [4] N. Kawai, A. Zakhor, T. Sato, N. Yokoya, "Surface Completion of Shape and Texture Based on Energy Minimization", Proc. ICIP, pp , [5] J. Verdera, V. Caselles, M. Bertalmio and G. Sapiro, "Inpainting surface holes", Proc. Int. Conf. on Image Processing, Vol.2, pp , [6] P. Liepa, "Filling Holes in Meshes. Symposium on Geometry Processing", pp , [7] J. Wang, M. M. Oliveira, "Filling holes on locally smooth surfaces reconstructed from point clouds", Image and Vision Computing, Vol.25, Issue.1, pp , [8] E. Altantsetseg, Y. Muraki, F. Chiba and K. Konno, "3D Surface Reconstruction of Stone Tools by Using Four-Directional Measurement Machine", The International Journal of Virtual Reality (IJVR), Vol.10, No.1, pp.37-43, [9] E. Altantsetseg, K. Matsuyama and K. Konno, "Minimum Surface Area Based Complex Hole Filling Algorithm of 3D Mesh", The Journal of the Society for Art and Science Vol.14, No.2, pp.26-35, [10] Emelyanov,A., Skala,V., "Surface Reconstruction from Problem Point Clouds", Graphicon 2002, Int.Conf.on Computer Graphics, pp.31-37, [11] Emelyanov,A., Skala,V., "A Method for Repaing Triangulations", Graphicon 2004 Int.Conf., pp , [12] Gerhard H. Bendels, Ruwen Schnabe and Reinhard Klein, "Detecting Holes in Point Set Surfaces", The Journal of WSCG, Vol.14(1-3), pp.89-96, (a)data A (b) Data B (c) Data C (d) Data D (e) Data E (f) Data F (g) Data G (h) Data H (i) Data I Figure 5. Result of applying to the experimental data
 (d)")




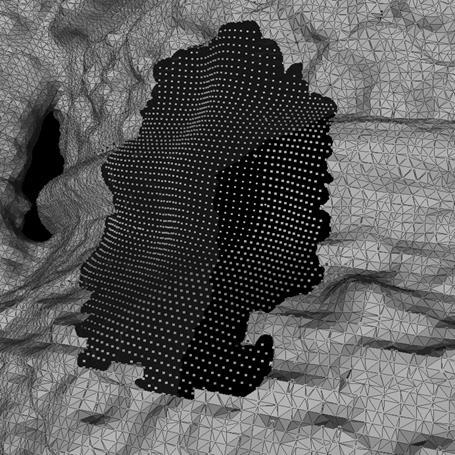
6 (a) (b) (c) (d) (e) (f) Figure 6. Result of applying to the actual scanned data
POSTER: Point Cloud Lossless Compression
 POSTER: Point Cloud Lossless Compression Koji Nishio Osaka Institute of Technology 1-79-1, Kitayama Hirakata, Osaka Japan(573-0196) nishio@is.oit.ac.jp Takayuki Kanaya Hiroshima International Univ. 555-36,
POSTER: Point Cloud Lossless Compression Koji Nishio Osaka Institute of Technology 1-79-1, Kitayama Hirakata, Osaka Japan(573-0196) nishio@is.oit.ac.jp Takayuki Kanaya Hiroshima International Univ. 555-36,
Minimum Surface Area Based Complex Hole Filling Algorithm of 3D Mesh
 Minimum Surface Area Based Complex Hole Filling Algorithm of 3D Mesh Enkhbayar Altantsetseg 1) Katsutsugu Matsuyama ) Kouichi Konno ) 1) National University of Mongolia ) Iwate University {enkhbayar.a}
Minimum Surface Area Based Complex Hole Filling Algorithm of 3D Mesh Enkhbayar Altantsetseg 1) Katsutsugu Matsuyama ) Kouichi Konno ) 1) National University of Mongolia ) Iwate University {enkhbayar.a}
Feature Extraction for Illustrating 3D Stone Tools from Unorganized Point Clouds
 Feature Extraction for Illustrating 3D Stone Tools from Unorganized Point Clouds Enkhbayar Altantsetseg 1) Yuta Muraki 2) Katsutsugu Matsuyama 2) Fumito Chiba 3) Kouichi Konno 2) 1) Graduate School of
Feature Extraction for Illustrating 3D Stone Tools from Unorganized Point Clouds Enkhbayar Altantsetseg 1) Yuta Muraki 2) Katsutsugu Matsuyama 2) Fumito Chiba 3) Kouichi Konno 2) 1) Graduate School of
A Hole-Filling Algorithm for Triangular Meshes. Abstract
 A Hole-Filling Algorithm for Triangular Meshes Lavanya Sita Tekumalla, Elaine Cohen UUCS-04-019 School of Computing University of Utah Salt Lake City, UT 84112 USA December 20, 2004 Abstract Data obtained
A Hole-Filling Algorithm for Triangular Meshes Lavanya Sita Tekumalla, Elaine Cohen UUCS-04-019 School of Computing University of Utah Salt Lake City, UT 84112 USA December 20, 2004 Abstract Data obtained
Image Inpainting by Hyperbolic Selection of Pixels for Two Dimensional Bicubic Interpolations
 Image Inpainting by Hyperbolic Selection of Pixels for Two Dimensional Bicubic Interpolations Mehran Motmaen motmaen73@gmail.com Majid Mohrekesh mmohrekesh@yahoo.com Mojtaba Akbari mojtaba.akbari@ec.iut.ac.ir
Image Inpainting by Hyperbolic Selection of Pixels for Two Dimensional Bicubic Interpolations Mehran Motmaen motmaen73@gmail.com Majid Mohrekesh mmohrekesh@yahoo.com Mojtaba Akbari mojtaba.akbari@ec.iut.ac.ir
Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds
 1 Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds Takeru Niwa 1 and Hiroshi Masuda 2 1 The University of Electro-Communications, takeru.niwa@uec.ac.jp 2 The University
1 Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds Takeru Niwa 1 and Hiroshi Masuda 2 1 The University of Electro-Communications, takeru.niwa@uec.ac.jp 2 The University
Digital Geometry Processing
 Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Computer Rubbings with Three-Dimensional Measurement Data
 Computer Rubbings with Three-Dimensional Measurement Data OOI Ken ichirou*, TSUKAMOTO Toshio**, SATO Kosuke* * Graduate School of Engineering Science, Osaka University, Japan ** Gangoji Institute for Cultural
Computer Rubbings with Three-Dimensional Measurement Data OOI Ken ichirou*, TSUKAMOTO Toshio**, SATO Kosuke* * Graduate School of Engineering Science, Osaka University, Japan ** Gangoji Institute for Cultural
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera
 Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps
 Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Study on Delaunay Triangulation with the Islets Constraints
 Intelligent Information Management, 2010, 2, 375-379 doi:10.4236/iim.2010.26045 Published Online June 2010 (http://www.scirp.org/journal/iim) Study on Delaunay Triangulation with the Islets Constraints
Intelligent Information Management, 2010, 2, 375-379 doi:10.4236/iim.2010.26045 Published Online June 2010 (http://www.scirp.org/journal/iim) Study on Delaunay Triangulation with the Islets Constraints
Occlusion Detection of Real Objects using Contour Based Stereo Matching
 Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Surface Reconstruction. Gianpaolo Palma
 Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
G 2 Interpolation for Polar Surfaces
 1 G 2 Interpolation for Polar Surfaces Jianzhong Wang 1, Fuhua Cheng 2,3 1 University of Kentucky, jwangf@uky.edu 2 University of Kentucky, cheng@cs.uky.edu 3 National Tsinhua University ABSTRACT In this
1 G 2 Interpolation for Polar Surfaces Jianzhong Wang 1, Fuhua Cheng 2,3 1 University of Kentucky, jwangf@uky.edu 2 University of Kentucky, cheng@cs.uky.edu 3 National Tsinhua University ABSTRACT In this
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE. Nan Hu. Stanford University Electrical Engineering
 STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE Nan Hu Stanford University Electrical Engineering nanhu@stanford.edu ABSTRACT Learning 3-D scene structure from a single still
STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE Nan Hu Stanford University Electrical Engineering nanhu@stanford.edu ABSTRACT Learning 3-D scene structure from a single still
BUILDING DETECTION AND STRUCTURE LINE EXTRACTION FROM AIRBORNE LIDAR DATA
 BUILDING DETECTION AND STRUCTURE LINE EXTRACTION FROM AIRBORNE LIDAR DATA C. K. Wang a,, P.H. Hsu a, * a Dept. of Geomatics, National Cheng Kung University, No.1, University Road, Tainan 701, Taiwan. China-
BUILDING DETECTION AND STRUCTURE LINE EXTRACTION FROM AIRBORNE LIDAR DATA C. K. Wang a,, P.H. Hsu a, * a Dept. of Geomatics, National Cheng Kung University, No.1, University Road, Tainan 701, Taiwan. China-
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA
 TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy
 An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy Chenyang Xu 1, Siemens Corporate Research, Inc., Princeton, NJ, USA Xiaolei Huang,
An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy Chenyang Xu 1, Siemens Corporate Research, Inc., Princeton, NJ, USA Xiaolei Huang,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Möbius Transformations in Scientific Computing. David Eppstein
 Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
A Constrained Delaunay Triangle Mesh Method for Three-Dimensional Unstructured Boundary Point Cloud
 International Journal of Computer Systems (ISSN: 2394-1065), Volume 03 Issue 02, February, 2016 Available at http://www.ijcsonline.com/ A Constrained Delaunay Triangle Mesh Method for Three-Dimensional
International Journal of Computer Systems (ISSN: 2394-1065), Volume 03 Issue 02, February, 2016 Available at http://www.ijcsonline.com/ A Constrained Delaunay Triangle Mesh Method for Three-Dimensional
Feature-Preserving Simplification of Point Cloud by Using Clustering Approach Based on Mean Curvature
 Feature-Preserving Simplification of Point Cloud by Using Clustering Approach Based on Mean Curvature Xi Yang 1) Katsutsugu Matsuyama 1) Kouichi Konno 1) Yoshimasa Tokuyama 2) 1) Graduate School of Engineering,
Feature-Preserving Simplification of Point Cloud by Using Clustering Approach Based on Mean Curvature Xi Yang 1) Katsutsugu Matsuyama 1) Kouichi Konno 1) Yoshimasa Tokuyama 2) 1) Graduate School of Engineering,
Efficient Rendering of Glossy Reflection Using Graphics Hardware
 Efficient Rendering of Glossy Reflection Using Graphics Hardware Yoshinori Dobashi Yuki Yamada Tsuyoshi Yamamoto Hokkaido University Kita-ku Kita 14, Nishi 9, Sapporo 060-0814, Japan Phone: +81.11.706.6530,
Efficient Rendering of Glossy Reflection Using Graphics Hardware Yoshinori Dobashi Yuki Yamada Tsuyoshi Yamamoto Hokkaido University Kita-ku Kita 14, Nishi 9, Sapporo 060-0814, Japan Phone: +81.11.706.6530,
A Generalized Mandelbrot Set Based On Distance Ratio
 A Generalized Mandelbrot Set Based On Distance Ratio Xizhe Zhang College of Computer Science and Technology, Jilin University No.2699, Qianjin street 3002, Changchun, Jilin, China zxzok@63.com Tianyang
A Generalized Mandelbrot Set Based On Distance Ratio Xizhe Zhang College of Computer Science and Technology, Jilin University No.2699, Qianjin street 3002, Changchun, Jilin, China zxzok@63.com Tianyang
A High Speed Face Measurement System
 A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
A High Speed Face Measurement System Kazuhide HASEGAWA, Kazuyuki HATTORI and Yukio SATO Department of Electrical and Computer Engineering, Nagoya Institute of Technology Gokiso, Showa, Nagoya, Japan, 466-8555
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Manhattan-World Assumption for As-built Modeling Industrial Plant
 Manhattan-World Assumption for As-built Modeling Industrial Plant Tomohiro Mizoguchi 1, Tomokazu Kuma 2, Yoshikazu Kobayashi 3 and Kenji Shirai 4 Department of Computer Science, College of Engineering,
Manhattan-World Assumption for As-built Modeling Industrial Plant Tomohiro Mizoguchi 1, Tomokazu Kuma 2, Yoshikazu Kobayashi 3 and Kenji Shirai 4 Department of Computer Science, College of Engineering,
Augmented Reality of Robust Tracking with Realistic Illumination 1
 International Journal of Fuzzy Logic and Intelligent Systems, vol. 10, no. 3, June 2010, pp. 178-183 DOI : 10.5391/IJFIS.2010.10.3.178 Augmented Reality of Robust Tracking with Realistic Illumination 1
International Journal of Fuzzy Logic and Intelligent Systems, vol. 10, no. 3, June 2010, pp. 178-183 DOI : 10.5391/IJFIS.2010.10.3.178 Augmented Reality of Robust Tracking with Realistic Illumination 1
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds
 9 1th International Conference on Document Analysis and Recognition Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds Weihan Sun, Koichi Kise Graduate School
9 1th International Conference on Document Analysis and Recognition Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds Weihan Sun, Koichi Kise Graduate School
Digital Halftoning Algorithm Based o Space-Filling Curve
 JAIST Reposi https://dspace.j Title Digital Halftoning Algorithm Based o Space-Filling Curve Author(s)ASANO, Tetsuo Citation IEICE TRANSACTIONS on Fundamentals o Electronics, Communications and Comp Sciences,
JAIST Reposi https://dspace.j Title Digital Halftoning Algorithm Based o Space-Filling Curve Author(s)ASANO, Tetsuo Citation IEICE TRANSACTIONS on Fundamentals o Electronics, Communications and Comp Sciences,
Mesh Repairing and Simplification. Gianpaolo Palma
 Mesh Repairing and Simplification Gianpaolo Palma Mesh Repairing Removal of artifacts from geometric model such that it becomes suitable for further processing Input: a generic 3D model Output: (hopefully)a
Mesh Repairing and Simplification Gianpaolo Palma Mesh Repairing Removal of artifacts from geometric model such that it becomes suitable for further processing Input: a generic 3D model Output: (hopefully)a
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA
 TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi, Francois de Sorbier and Hideo Saito Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi, Kohoku-ku,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi, Francois de Sorbier and Hideo Saito Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi, Kohoku-ku,
Touching-Pigs Segmentation using Concave Points in Continuous Video Frames
 Touching-Pigs Segmentation using Concave Points in Continuous Video Frames Miso Ju misoalth@korea.ac.kr Daihee Park dhpark@korea.ac.kr Jihyun Seo goyangi100@korea.ac.kr Yongwha Chung ychungy@korea.ac.kr
Touching-Pigs Segmentation using Concave Points in Continuous Video Frames Miso Ju misoalth@korea.ac.kr Daihee Park dhpark@korea.ac.kr Jihyun Seo goyangi100@korea.ac.kr Yongwha Chung ychungy@korea.ac.kr
CS337 INTRODUCTION TO COMPUTER GRAPHICS. Describing Shapes. Constructing Objects in Computer Graphics. Bin Sheng Representing Shape 9/20/16 1/15
 Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Task analysis based on observing hands and objects by vision
 Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Generation of Triangle Meshes from Time-of-Flight Data for Surface Registration
 Generation of Triangle Meshes from Time-of-Flight Data for Surface Registration Thomas Kilgus, Thiago R. dos Santos, Alexander Seitel, Kwong Yung, Alfred M. Franz, Anja Groch, Ivo Wolf, Hans-Peter Meinzer,
Generation of Triangle Meshes from Time-of-Flight Data for Surface Registration Thomas Kilgus, Thiago R. dos Santos, Alexander Seitel, Kwong Yung, Alfred M. Franz, Anja Groch, Ivo Wolf, Hans-Peter Meinzer,
Effective adaptation of hexahedral mesh using local refinement and error estimation
 Key Engineering Materials Vols. 243-244 (2003) pp. 27-32 online at http://www.scientific.net (2003) Trans Tech Publications, Switzerland Online Citation available & since 2003/07/15 Copyright (to be inserted
Key Engineering Materials Vols. 243-244 (2003) pp. 27-32 online at http://www.scientific.net (2003) Trans Tech Publications, Switzerland Online Citation available & since 2003/07/15 Copyright (to be inserted
This lab exercise has two parts: (a) scan a part using a laser scanner, (b) construct a surface model from the scanned data points.
 scan a part using a laser scanner, (b) construct a surface model from the scanned data points.") 1 IIEM 215: Manufacturing Processes I Lab 4. Reverse Engineering: Laser Scanning and CAD Model construction This lab exercise has two parts: (a) scan a part using a laser scanner, (b) construct a surface
1 IIEM 215: Manufacturing Processes I Lab 4. Reverse Engineering: Laser Scanning and CAD Model construction This lab exercise has two parts: (a) scan a part using a laser scanner, (b) construct a surface
CS123 INTRODUCTION TO COMPUTER GRAPHICS. Describing Shapes. Constructing Objects in Computer Graphics 1/15
 Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
A Multi-scale Approach to 3D Scattered Data Interpolation with Compactly Supported Basis Functions
 Shape Modeling International 2003 Seoul, Korea A Multi-scale Approach to 3D Scattered Data Interpolation with Compactly Supported Basis Functions Yutaa Ohtae Alexander Belyaev Hans-Peter Seidel Objective
Shape Modeling International 2003 Seoul, Korea A Multi-scale Approach to 3D Scattered Data Interpolation with Compactly Supported Basis Functions Yutaa Ohtae Alexander Belyaev Hans-Peter Seidel Objective
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
FOOTPRINTS EXTRACTION
 Building Footprints Extraction of Dense Residential Areas from LiDAR data KyoHyouk Kim and Jie Shan Purdue University School of Civil Engineering 550 Stadium Mall Drive West Lafayette, IN 47907, USA {kim458,
Building Footprints Extraction of Dense Residential Areas from LiDAR data KyoHyouk Kim and Jie Shan Purdue University School of Civil Engineering 550 Stadium Mall Drive West Lafayette, IN 47907, USA {kim458,
Point-Based Rendering
 Point-Based Rendering Kobbelt & Botsch, Computers & Graphics 2004 Surface Splatting (EWA: Elliptic Weighted Averaging) Main Idea Signal Processing Basics Resampling Gaussian Filters Reconstruction Kernels
Point-Based Rendering Kobbelt & Botsch, Computers & Graphics 2004 Surface Splatting (EWA: Elliptic Weighted Averaging) Main Idea Signal Processing Basics Resampling Gaussian Filters Reconstruction Kernels
Subdivision Curves and Surfaces: An Introduction
 Subdivision Curves and Surfaces: An Introduction Corner Cutting De Casteljau s and de Boor s algorithms all use corner-cutting procedures. Corner cutting can be local or non-local. A cut is local if it
Subdivision Curves and Surfaces: An Introduction Corner Cutting De Casteljau s and de Boor s algorithms all use corner-cutting procedures. Corner cutting can be local or non-local. A cut is local if it
Geometric Modeling in Graphics
 Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Parameterization of Triangular Meshes with Virtual Boundaries
 Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Offset Triangular Mesh Using the Multiple Normal Vectors of a Vertex
 285 Offset Triangular Mesh Using the Multiple Normal Vectors of a Vertex Su-Jin Kim 1, Dong-Yoon Lee 2 and Min-Yang Yang 3 1 Korea Advanced Institute of Science and Technology, sujinkim@kaist.ac.kr 2 Korea
285 Offset Triangular Mesh Using the Multiple Normal Vectors of a Vertex Su-Jin Kim 1, Dong-Yoon Lee 2 and Min-Yang Yang 3 1 Korea Advanced Institute of Science and Technology, sujinkim@kaist.ac.kr 2 Korea
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Object Removal Using Exemplar-Based Inpainting
 CS766 Prof. Dyer Object Removal Using Exemplar-Based Inpainting Ye Hong University of Wisconsin-Madison Fall, 2004 Abstract Two commonly used approaches to fill the gaps after objects are removed from
CS766 Prof. Dyer Object Removal Using Exemplar-Based Inpainting Ye Hong University of Wisconsin-Madison Fall, 2004 Abstract Two commonly used approaches to fill the gaps after objects are removed from
Study on Improving the Quality of Reconstructed NURBS Surfaces
 Study on Improving the Quality of Reconstructed NURBS Surfaces Shufeng jiang, Shigang Wang, Yong Yan School of Mechatronic Engineering, Qiqihar University, Qiqihar 161006, China Abstract In aspect of surface
Study on Improving the Quality of Reconstructed NURBS Surfaces Shufeng jiang, Shigang Wang, Yong Yan School of Mechatronic Engineering, Qiqihar University, Qiqihar 161006, China Abstract In aspect of surface
The Proposal of a New Image Inpainting Algorithm
 The roposal of a New Image Inpainting Algorithm Ouafek Naouel 1, M. Khiredinne Kholladi 2, 1 Department of mathematics and computer sciences ENS Constantine, MISC laboratory Constantine, Algeria naouelouafek@yahoo.fr
The roposal of a New Image Inpainting Algorithm Ouafek Naouel 1, M. Khiredinne Kholladi 2, 1 Department of mathematics and computer sciences ENS Constantine, MISC laboratory Constantine, Algeria naouelouafek@yahoo.fr
Using Perspective Rays and Symmetry to Model Duality
 Using Perspective Rays and Symmetry to Model Duality Alex Wang Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2016-13 http://www.eecs.berkeley.edu/pubs/techrpts/2016/eecs-2016-13.html
Using Perspective Rays and Symmetry to Model Duality Alex Wang Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2016-13 http://www.eecs.berkeley.edu/pubs/techrpts/2016/eecs-2016-13.html
AUTOMATIC DRAWING FOR TRAFFIC MARKING WITH MMS LIDAR INTENSITY
 AUTOMATIC DRAWING FOR TRAFFIC MARKING WITH MMS LIDAR INTENSITY G. Takahashi a, H. Takeda a, Y. Shimano a a Spatial Information Division, Kokusai Kogyo Co., Ltd., Tokyo, Japan - (genki_takahashi, hiroshi1_takeda,
AUTOMATIC DRAWING FOR TRAFFIC MARKING WITH MMS LIDAR INTENSITY G. Takahashi a, H. Takeda a, Y. Shimano a a Spatial Information Division, Kokusai Kogyo Co., Ltd., Tokyo, Japan - (genki_takahashi, hiroshi1_takeda,
Minimum Bounding Boxes for Regular Cross-Polytopes
 Minimum Bounding Boxes for Regular Cross-Polytopes Salman Shahid Michigan State University shahids1@cse.msu.edu Dr. Sakti Pramanik Michigan State University pramanik@cse.msu.edu Dr. Charles B. Owen Michigan
Minimum Bounding Boxes for Regular Cross-Polytopes Salman Shahid Michigan State University shahids1@cse.msu.edu Dr. Sakti Pramanik Michigan State University pramanik@cse.msu.edu Dr. Charles B. Owen Michigan
Level lines based disocclusion
 Level lines based disocclusion Simon Masnou Jean-Michel Morel CEREMADE CMLA Université Paris-IX Dauphine Ecole Normale Supérieure de Cachan 75775 Paris Cedex 16, France 94235 Cachan Cedex, France Abstract
Level lines based disocclusion Simon Masnou Jean-Michel Morel CEREMADE CMLA Université Paris-IX Dauphine Ecole Normale Supérieure de Cachan 75775 Paris Cedex 16, France 94235 Cachan Cedex, France Abstract
Factorization Method Using Interpolated Feature Tracking via Projective Geometry
 Factorization Method Using Interpolated Feature Tracking via Projective Geometry Hideo Saito, Shigeharu Kamijima Department of Information and Computer Science, Keio University Yokohama-City, 223-8522,
Factorization Method Using Interpolated Feature Tracking via Projective Geometry Hideo Saito, Shigeharu Kamijima Department of Information and Computer Science, Keio University Yokohama-City, 223-8522,
Evaluation of Image Processing Algorithms on Vehicle Safety System Based on Free-viewpoint Image Rendering
 Evaluation of Image Processing Algorithms on Vehicle Safety System Based on Free-viewpoint Image Rendering Akitaka Oko,, Tomokazu Sato, Hideyuki Kume, Takashi Machida 2 and Naokazu Yokoya Abstract Development
Evaluation of Image Processing Algorithms on Vehicle Safety System Based on Free-viewpoint Image Rendering Akitaka Oko,, Tomokazu Sato, Hideyuki Kume, Takashi Machida 2 and Naokazu Yokoya Abstract Development
Improved Illumination Estimation for Photon Maps in Architectural Scenes
 Improved Illumination Estimation for Photon Maps in Architectural Scenes Robert F. Tobler VRVis Research Center Donau-City Str. 1/3 1120 Wien, Austria rft@vrvis.at Stefan Maierhofer VRVis Research Center
Improved Illumination Estimation for Photon Maps in Architectural Scenes Robert F. Tobler VRVis Research Center Donau-City Str. 1/3 1120 Wien, Austria rft@vrvis.at Stefan Maierhofer VRVis Research Center
Texture Sensitive Image Inpainting after Object Morphing
 Texture Sensitive Image Inpainting after Object Morphing Yin Chieh Liu and Yi-Leh Wu Department of Computer Science and Information Engineering National Taiwan University of Science and Technology, Taiwan
Texture Sensitive Image Inpainting after Object Morphing Yin Chieh Liu and Yi-Leh Wu Department of Computer Science and Information Engineering National Taiwan University of Science and Technology, Taiwan
Data Representation in Visualisation
 Data Representation in Visualisation Visualisation Lecture 4 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Data Representation 1 Data Representation We have
Data Representation in Visualisation Visualisation Lecture 4 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Data Representation 1 Data Representation We have
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
Collision Detection based on Spatial Partitioning
 Simulation in Computer Graphics Collision Detection based on Spatial Partitioning Matthias Teschner Computer Science Department University of Freiburg Outline introduction uniform grid Octree and k-d tree
Simulation in Computer Graphics Collision Detection based on Spatial Partitioning Matthias Teschner Computer Science Department University of Freiburg Outline introduction uniform grid Octree and k-d tree
Measurements using three-dimensional product imaging
 ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 10 Special Issue 3/2010 41 46 7/3 Measurements using
ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 10 Special Issue 3/2010 41 46 7/3 Measurements using
A Sketch Interpreter System with Shading and Cross Section Lines
 Journal for Geometry and Graphics Volume 9 (2005), No. 2, 177 189. A Sketch Interpreter System with Shading and Cross Section Lines Kunio Kondo 1, Haruki Shizuka 1, Weizhong Liu 1, Koichi Matsuda 2 1 Dept.
Journal for Geometry and Graphics Volume 9 (2005), No. 2, 177 189. A Sketch Interpreter System with Shading and Cross Section Lines Kunio Kondo 1, Haruki Shizuka 1, Weizhong Liu 1, Koichi Matsuda 2 1 Dept.
Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner
 using an infrared camera coupled to a 3D scanner") Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner F. B. Djupkep Dizeu, S. Hesabi, D. Laurendeau, A. Bendada Computer Vision and
Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner F. B. Djupkep Dizeu, S. Hesabi, D. Laurendeau, A. Bendada Computer Vision and
3D Modeling Parametric Curves & Surfaces
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
Image Classification for JPEG Compression
 Image Classification for Compression Jevgenij Tichonov Vilnius University, Institute of Mathematics and Informatics Akademijos str. 4 LT-08663, Vilnius jevgenij.tichonov@gmail.com Olga Kurasova Vilnius
Image Classification for Compression Jevgenij Tichonov Vilnius University, Institute of Mathematics and Informatics Akademijos str. 4 LT-08663, Vilnius jevgenij.tichonov@gmail.com Olga Kurasova Vilnius
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS.
 SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
Linear Discriminant Analysis in Ottoman Alphabet Character Recognition
 Linear Discriminant Analysis in Ottoman Alphabet Character Recognition ZEYNEB KURT, H. IREM TURKMEN, M. ELIF KARSLIGIL Department of Computer Engineering, Yildiz Technical University, 34349 Besiktas /
Linear Discriminant Analysis in Ottoman Alphabet Character Recognition ZEYNEB KURT, H. IREM TURKMEN, M. ELIF KARSLIGIL Department of Computer Engineering, Yildiz Technical University, 34349 Besiktas /
u 0+u 2 new boundary vertex
 Combined Subdivision Schemes for the design of surfaces satisfying boundary conditions Adi Levin School of Mathematical Sciences, Tel-Aviv University, Tel-Aviv 69978, Israel. Email:fadilev@math.tau.ac.ilg
Combined Subdivision Schemes for the design of surfaces satisfying boundary conditions Adi Levin School of Mathematical Sciences, Tel-Aviv University, Tel-Aviv 69978, Israel. Email:fadilev@math.tau.ac.ilg
arxiv:cs/ v1 [cs.cg] 13 Jun 2001
![arxiv:cs/ v1 [cs.cg] 13 Jun 2001](/thumbs/80/81425240.jpg "arxiv:cs/ v1 [cs.cg] 13 Jun 2001") Hinged Kite Mirror Dissection David Eppstein arxiv:cs/0106032v1 [cs.cg] 13 Jun 2001 Abstract Any two polygons of equal area can be partitioned into congruent sets of polygonal pieces, and in many cases
Hinged Kite Mirror Dissection David Eppstein arxiv:cs/0106032v1 [cs.cg] 13 Jun 2001 Abstract Any two polygons of equal area can be partitioned into congruent sets of polygonal pieces, and in many cases
DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS
 DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS Tsunetake Kanatani,, Hideyuki Kume, Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Hyogo Prefectural
DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS Tsunetake Kanatani,, Hideyuki Kume, Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Hyogo Prefectural
Algorithm research of 3D point cloud registration based on iterative closest point 1
 Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Time Stamp Detection and Recognition in Video Frames
 Time Stamp Detection and Recognition in Video Frames Nongluk Covavisaruch and Chetsada Saengpanit Department of Computer Engineering, Chulalongkorn University, Bangkok 10330, Thailand E-mail: nongluk.c@chula.ac.th
Time Stamp Detection and Recognition in Video Frames Nongluk Covavisaruch and Chetsada Saengpanit Department of Computer Engineering, Chulalongkorn University, Bangkok 10330, Thailand E-mail: nongluk.c@chula.ac.th
Research Article Polygon Morphing and Its Application in Orebody Modeling
 Mathematical Problems in Engineering Volume 212, Article ID 732365, 9 pages doi:1.1155/212/732365 Research Article Polygon Morphing and Its Application in Orebody Modeling Hacer İlhan and Haşmet Gürçay
Mathematical Problems in Engineering Volume 212, Article ID 732365, 9 pages doi:1.1155/212/732365 Research Article Polygon Morphing and Its Application in Orebody Modeling Hacer İlhan and Haşmet Gürçay
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Fan-Meshes: A Geometric Primitive for Point-based Description of 3D Models and Scenes
 Fan-Meshes: A Geometric Primitive for Point-based Description of 3D Models and Scenes Xiaotian Yan, Fang Meng, Hongbin Zha National Laboratory on Machine Perception Peking University, Beijing, P. R. China
Fan-Meshes: A Geometric Primitive for Point-based Description of 3D Models and Scenes Xiaotian Yan, Fang Meng, Hongbin Zha National Laboratory on Machine Perception Peking University, Beijing, P. R. China
AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor
 AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor Takafumi Taketomi, Tomokazu Sato, and Naokazu Yokoya Graduate School of Information
AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor Takafumi Taketomi, Tomokazu Sato, and Naokazu Yokoya Graduate School of Information
Learning based face hallucination techniques: A survey
 Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
3D Modeling Parametric Curves & Surfaces. Shandong University Spring 2013
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2013 3D Object Representations Raw data Point cloud Range image Polygon soup Surfaces Mesh Subdivision Parametric Implicit Solids Voxels
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2013 3D Object Representations Raw data Point cloud Range image Polygon soup Surfaces Mesh Subdivision Parametric Implicit Solids Voxels
Shape from Textures Phenomenon for 3D Modeling Applications with Big Data Images
 Shape from Textures Phenomenon for 3D Modeling Applications with Big Data Images Kalaivani Thangamani, Takashi Okuma, Ryosuke Ichikari and Takeshi Kurata Service Sensing, Assimilation, and Modeling Research
Shape from Textures Phenomenon for 3D Modeling Applications with Big Data Images Kalaivani Thangamani, Takashi Okuma, Ryosuke Ichikari and Takeshi Kurata Service Sensing, Assimilation, and Modeling Research
Curves & Surfaces. Last Time? Progressive Meshes. Selective Refinement. Adjacency Data Structures. Mesh Simplification. Mesh Simplification
 Last Time? Adjacency Data Structures Curves & Surfaces Geometric & topologic information Dynamic allocation Efficiency of access Mesh Simplification edge collapse/vertex split geomorphs progressive transmission
Last Time? Adjacency Data Structures Curves & Surfaces Geometric & topologic information Dynamic allocation Efficiency of access Mesh Simplification edge collapse/vertex split geomorphs progressive transmission
Petrel TIPS&TRICKS from SCM
 Petrel TIPS&TRICKS from SCM Knowledge Worth Sharing Merging Overlapping Files into One 2D Grid Often several files (grids or data) covering adjacent and overlapping areas must be combined into one 2D Grid.
Petrel TIPS&TRICKS from SCM Knowledge Worth Sharing Merging Overlapping Files into One 2D Grid Often several files (grids or data) covering adjacent and overlapping areas must be combined into one 2D Grid.
Geometry Completion and Detail Generation by Texture Synthesis
 Geometry Completion and Detail Generation by Texture Synthesis Minh X. Nguyen Xiaoru Yuan Baoquan Chen Department of Computer Science and Engineering and Digital Technology Center (DTC) University of Minnesota
Geometry Completion and Detail Generation by Texture Synthesis Minh X. Nguyen Xiaoru Yuan Baoquan Chen Department of Computer Science and Engineering and Digital Technology Center (DTC) University of Minnesota
An Efficient Data Structure for Representing Trilateral/Quadrilateral Subdivision Surfaces
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 3, No 3 Sofia 203 Print ISSN: 3-9702; Online ISSN: 34-408 DOI: 0.2478/cait-203-0023 An Efficient Data Structure for Representing
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 3, No 3 Sofia 203 Print ISSN: 3-9702; Online ISSN: 34-408 DOI: 0.2478/cait-203-0023 An Efficient Data Structure for Representing
Blob-Representation of Multidimensional Objects and Surfaces
 Blob-Representation of Multidimensional Objects and Surfaces Edgar Garduño and Gabor T. Herman Department of Computer Science The Graduate Center City University of New York Presentation Outline Reconstruction
Blob-Representation of Multidimensional Objects and Surfaces Edgar Garduño and Gabor T. Herman Department of Computer Science The Graduate Center City University of New York Presentation Outline Reconstruction
3D Object Scanning to Support Computer-Aided Conceptual Design
 ABSTRACT 3D Object Scanning to Support Computer-Aided Conceptual Design J.S.M. Vergeest and I. Horváth Delft University of Technology Faculty of Design, Engineering and Production Jaffalaan 9, NL-2628
ABSTRACT 3D Object Scanning to Support Computer-Aided Conceptual Design J.S.M. Vergeest and I. Horváth Delft University of Technology Faculty of Design, Engineering and Production Jaffalaan 9, NL-2628
Integrated High-Quality Acquisition of Geometry and Appearance for Cultural Heritage
 Integrated High-Quality Acquisition of Geometry and Appearance for Cultural Heritage Christopher Schwartz, Michael Weinmann, Roland Ruiters, Reinhard Klein Institute of Computer Science II Computer Graphics
Integrated High-Quality Acquisition of Geometry and Appearance for Cultural Heritage Christopher Schwartz, Michael Weinmann, Roland Ruiters, Reinhard Klein Institute of Computer Science II Computer Graphics
Volume Editor. Hans Weghorn Faculty of Mechatronics BA-University of Cooperative Education, Stuttgart Germany
 Volume Editor Hans Weghorn Faculty of Mechatronics BA-University of Cooperative Education, Stuttgart Germany Proceedings of the 4 th Annual Meeting on Information Technology and Computer Science ITCS,
Volume Editor Hans Weghorn Faculty of Mechatronics BA-University of Cooperative Education, Stuttgart Germany Proceedings of the 4 th Annual Meeting on Information Technology and Computer Science ITCS,
Rectification of distorted elemental image array using four markers in three-dimensional integral imaging
 Rectification of distorted elemental image array using four markers in three-dimensional integral imaging Hyeonah Jeong 1 and Hoon Yoo 2 * 1 Department of Computer Science, SangMyung University, Korea.
Rectification of distorted elemental image array using four markers in three-dimensional integral imaging Hyeonah Jeong 1 and Hoon Yoo 2 * 1 Department of Computer Science, SangMyung University, Korea.
Subdivision Surfaces. Homework 1: Questions on Homework? Last Time? Today. Tensor Product. What s an illegal edge collapse?
 Homework 1: Questions/Comments? Subdivision Surfaces Questions on Homework? Last Time? What s an illegal edge collapse? Curves & Surfaces Continuity Definitions 2 3 C0, G1, C1, C 1 a b 4 Interpolation
Homework 1: Questions/Comments? Subdivision Surfaces Questions on Homework? Last Time? What s an illegal edge collapse? Curves & Surfaces Continuity Definitions 2 3 C0, G1, C1, C 1 a b 4 Interpolation
MA 323 Geometric Modelling Course Notes: Day 21 Three Dimensional Bezier Curves, Projections and Rational Bezier Curves
 MA 323 Geometric Modelling Course Notes: Day 21 Three Dimensional Bezier Curves, Projections and Rational Bezier Curves David L. Finn Over the next few days, we will be looking at extensions of Bezier
MA 323 Geometric Modelling Course Notes: Day 21 Three Dimensional Bezier Curves, Projections and Rational Bezier Curves David L. Finn Over the next few days, we will be looking at extensions of Bezier
Image Inpainting Using Sparsity of the Transform Domain
 Image Inpainting Using Sparsity of the Transform Domain H. Hosseini*, N.B. Marvasti, Student Member, IEEE, F. Marvasti, Senior Member, IEEE Advanced Communication Research Institute (ACRI) Department of
Image Inpainting Using Sparsity of the Transform Domain H. Hosseini*, N.B. Marvasti, Student Member, IEEE, F. Marvasti, Senior Member, IEEE Advanced Communication Research Institute (ACRI) Department of
Important note To cite this publication, please use the final published version (if applicable). Please check the document version above.
. Please check the document version above.") Delft University of Technology Reverse engineering of free form shell structures From point cloud to finite element model Eigenraam, Peter; Borgart, Andrew Publication date 2016 Document Version Publisher's
Delft University of Technology Reverse engineering of free form shell structures From point cloud to finite element model Eigenraam, Peter; Borgart, Andrew Publication date 2016 Document Version Publisher's