Using and Understanding the Real-Time Cyclictest Benchmark
|
|
|
- Theresa Malone
- 5 years ago
- Views:
Transcription
1
2 Using and Understanding the Real-Time Cyclictest Benchmark Cyclictest results are the most frequently cited real-time Linux metric. The core concept of Cyclictest is very simple. However the test options are very extensive. The meaning of Cyclictest results appear simple but are actually quite complex. This talk will explore and explain the complexities of Cyclictest. At the end of the talk, the audience will understand how Cyclictest results describe the potential real-time performance of a system. Frank Rowand, Sony Mobile Communications May 29, _1150
3 What Cyclictest Measures Latency of response to a stimulus. external interrupt triggers (clock expires) - possible delay until IRQs enabled - IRQ handling - cyclictest is woken - possible delay until preemption enabled - possible delay until cyclictest is highest priority - possible delay until other process is preempted - scheduler overhead transfer control to cyclictest
4 What Cyclictest Measures Latency of response to a stimulus. Causes of delay list on previous slide is simplified: - order will vary - may occur multiple times - there are additional causes of delay
5 Many factors can increase latency - additional external interrupts - SMI - processor emerging from sleep states - cache migration of data used by woken process - block on sleeping lock - lock owner gets priority boost - lock owner schedules - lock owner completes scheduled work - lock owner releases lock, loses priority boost
6 How Cyclictest Measures Latency (Cyclictest Pseudocode) The source code is nearly 3000 lines, but the algorithm is trivial
7 Test Loop clock_gettime((&now)) next = now + par->interval while (!shutdown) { clock_nanosleep((&next)) clock_gettime((&now)) diff = calcdiff(now, next) # update stat-> min, max, total latency, cycles # update the histogram data } next += interval
8 The Magic of Simple This trivial algorithm captures all of the factors that contribute to latency. Mostly. Caveats will follow soon.
9 Cyclictest Program main() { for (i = 0; i < num_threads; i++) { pthread_create((timerthread)) while (!shutdown) { for (i = 0; i < num_threads; i++) print_stat((stats[i]), i)) usleep(10000) } } if (histogram) print_hist(parameters, num_threads)
10 timerthread() *timerthread(void *par) { # thread set up # test loop }
11 Thread Set Up stat = par->stats; pthread_setaffinity_np((pthread_self())) setscheduler(({par->policy, par->priority)) sigprocmask((sig_block))
12 Test Loop (as shown earlier) clock_gettime((&now)) next = now + par->interval while (!shutdown) { clock_nanosleep((&next)) clock_gettime((&now)) diff = calcdiff(now, next) # update stat-> min, max, avg, cycles # Update the histogram } next += interval
13 Why show set up pseudocode? The timer threads are not in lockstep from time zero. Multiple threads will probably not directly impact each other.
14 The Magic of Simple This trivial algorithm captures all of the factors that contribute to latency. Mostly. Caveats, as promised.
15 Caveats Measured maximum latency is a floor of the possible maximum latency - Causes of delay may be partially completed when timer IRQ occurs - Cyclictest wakeup is on a regular cadence, may miss delay sources that occur outside the cadence slots
16 Caveats Does not measure the IRQ handling path of the real RT application - timer IRQ handling typically fully in IRQ context - normal interrupt source IRQ handling: - irq context, small handler, wakes IRQ thread - IRQ thread eventually executes, wakes RT process
17 Caveats Cyclictest may not exercise latency paths that are triggered by the RT application, or even non-rt applications - SMI to fixup instruction errata - stop_machine() - module load / unload - hotplug
18 Solution 1 Do not use cyclictest. :-) Instrument the RT application to measure latency
19 Solution 2 Run the normal RT application and non-rt applications as the system load Run cyclictest with a higher priority than the RT application to measure latency
20 Solution 2 Typical real time application will consist of multiple threads, with differing priorities and latency requirements To capture latencies of each of the threads, run separate tests, varying the cyclictest priority
21 Solution 2 Example RT app RT app deadline latency scheduler cyclictest thread constraint constraint priority priority A critical 80 usec B 0.1% miss 100 usec 47 48
22
23
24 Aside: Cyclictest output in these slides is edited to fit on the slides Original: $ cyclictest_0.85 -l q -p80 -S T: 0 ( 460) P:80 I:1000 C: Min: 37 Act: 43 Avg: 45 Max: 68 T: 1 ( 461) P:80 I:1500 C: Min: 37 Act: 49 Avg: 42 Max: 72 Example of edit: $ cyclictest_0.85 -l q -p80 -S T:0 I:1000 Min: 37 Avg: 45 Max: 68 T:1 I:1500 Min: 37 Avg: 42 Max: 72
25 Cyclictest Command Line Options Do I really care??? Can I just run it with the default options???
26 Do I really care??? $ cyclictest_0.85 -l q -p80 T:0 Min: 262 Avg: 281 Max: 337 $ cyclictest_0.85 -l q -p80 -n T:0 Min: 35 Avg: 43 Max: 68 -l stop after loops -q quiet -p80 priority 80, SCHED_FIFO -n use clock_nanosleep() instead of nanosleep()
27
28
29 Impact of Options More examples Be somewhat skeptical of maximum latencies due to the short test duration. Examples are: 100,000 loops 1,000,000 loops Arbitrary choice of loop count. Need large values to properly measure maximum latency!!!
30 Priority of Real Time kernel threads for next two slides PID PPID S RTPRIO CLS CMD 3 2 S 1 FF [ksoftirqd/0] 6 2 S 70 FF [posixcputmr/0] 7 2 S 99 FF [migration/0] 8 2 S 70 FF [posixcputmr/1] 9 2 S 99 FF [migration/1] 11 2 S 1 FF [ksoftirqd/1] S 50 FF [irq/41-eth%d] S 50 FF [irq/46-mmci-pl1] S 50 FF [irq/47-mmci-pl1] S 50 FF [irq/36-uart-pl0]
31 -l T:0 Min: 128 Avg: 189 Max: 2699 live update T:0 Min: 125 Avg: 140 Max: 472 -q no live update T:0 Min: 262 Avg: 281 Max: 337 -p80 SCHED_FIFO 80 T:0 Min: 88 Avg: 96 Max: 200 -n clock_nanosleep T:0 Min: 246 Avg: 320 Max: 496 -q -p80 -a -t pinned T:1 Min: 253 Avg: 315 Max: 509 T:0 Min: 35 Avg: 43 Max: 68 -q -p80 -n SCHED_FIFO, c_n T:0 Min: 34 Avg: 44 Max: 71 -q -p80 -a -n pinned T:0 Min: 38 Avg: 43 Max: 119 -q -p80 -a -n -m mem locked T:0 Min: 36 Avg: 43 Max: 65 -q -p80 -t -n not pinned T:1 Min: 37 Avg: 45 Max: 78 T:0 Min: 36 Avg: 44 Max: 91 -q -p80 -a -t -n pinned T:1 Min: 37 Avg: 45 Max: 111 T:0 Min: 34 Avg: 44 Max: 94 -q -p80 -S => -a -t -n T:1 Min: 34 Avg: 43 Max: 104
32 -l T:0 Min: 123 Avg: 184 Max: 3814 live update T:0 Min: 125 Avg: 150 Max: 860 -q no live update T:0 Min: 257 Avg: 281 Max: 371 -q -p80 SCHED_FIFO 80 T:0 Min: 84 Avg: 94 Max: 319 -q -n clock_nanosleep T:0 Min: 247 Avg: 314 Max: 682 -q -p80 -a -t pinned T:1 Min: 228 Avg: 321 Max: 506 T:0 Min: 38 Avg: 44 Max: 72 -q -p80 -n SCHED_FIFO, c_n T:0 Min: 33 Avg: 42 Max: 95 -q -p80 -a -n pinned T:0 Min: 36 Avg: 42 Max: 144 -q -p80 -a -n -m mem locked T:0 Min: 36 Avg: 44 Max: 84 -q -p80 -t -n not pinned T:1 Min: 37 Avg: 45 Max: 94 T:0 Min: 36 Avg: 43 Max: 87 -q -p80 -a -t -n pinned T:1 Min: 36 Avg: 43 Max: 91 T:0 Min: 36 Avg: 43 Max: 141 -q -p80 -S => -a -t -n T:1 Min: 34 Avg: 42 Max: 88
33
34
35 Simple Demo -- SCHED_NORMAL - single thread - clock_nanosleep(), one thread per cpu, pinned - clock_nanosleep(), one thread per cpu - clock_nanosleep(), one thread per cpu, memory locked - clock_nanosleep(), one thread per cpu, memory locked, non-interactive
36 What Are Normal Results? What should I expect the data to look like for my system?
37 Examples of Maximum Latency #Platforms_Tested_and_in_Use_with_CONFIG_PREEMPT_RT Platforms Tested and in Use with CONFIG_PREEMPT_RT Comments sometimes include avg and max latency table is usually stale linux-rt-users list archives
38 Graphs of Maximum Latency OSADL.org Graphs for a wide variety of machines List of test systems:
39
40 Full URL of previous graph Typical command: cyclictest -l m -Sp99 -i200 -h400 -q OSADL Realtime QA Farm: OSADL Latency plots:
41 Additional OSADL Data OSADL members have access to additional data, such as - the data used to create the graphs - the latency graphs extended in a third dimension, showing all test runs
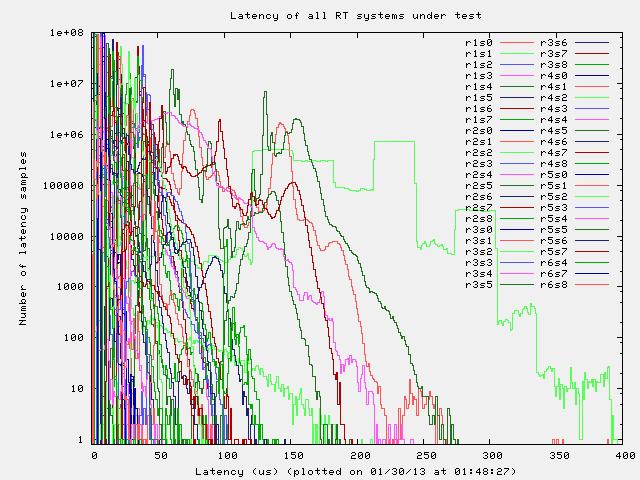
42 Some Random Individual Systems Picked from the OSADL spaghetti graph
43
44
45
46
47
48
49
50
51
52
53 Even boring graphs may contain interesting details
54
55
56
57 Command Line Options An unruly, out of control, set of control knobs
58 $ cyclictest --help cyclictest V 0.85 Usage: cyclictest <options> -a [NUM] --affinity run thread #N on processor #N, if possible with NUM pin all threads to the processor NUM -b USEC --breaktrace=usec send break trace command when latency > USEC -B --preemptirqs both preempt and irqsoff tracing (used with -b) -c CLOCK --clock=clock select clock 0 = CLOCK_MONOTONIC (default) 1 = CLOCK_REALTIME -C --context context switch tracing (used with -b) -d DIST --distance=dist distance of thread intervals in us default=500 -D --duration=t specify a length for the test run default is in seconds, but 'm', 'h', or 'd' maybe added to modify value to minutes, hours or days -e --latency=pm_qos write PM_QOS to /dev/cpu_dma_latency -E --event event tracing (used with -b) -f --ftrace function trace (when -b is active) -g MAX --of_max=max Report time in ms (up to MAX) for histogram overflows -h --histogram=us dump a latency histogram to stdout after the run (with same priority about many threads) US is the max time to be be tracked in microseconds -H --histofall=us same as -h except with an additional summary column -i INTV --interval=intv base interval of thread in us default=1000 -I --irqsoff Irqsoff tracing (used with -b) -l LOOPS --loops=loops number of loops: default=0(endless) -m --mlockall lock current and future memory allocations -M --refresh_on_max delay updating the screen until a new max latency is hit -n --nanosleep use clock_nanosleep -N --nsecs print results in ns instead of us (default us) -o RED --oscope=red oscilloscope mode, reduce verbose output by RED -O TOPT --traceopt=topt trace option -p PRIO --prio=prio priority of highest prio thread -P --preemptoff Preempt off tracing (used with -b) -q --quiet print only a summary on exit -Q --priospread spread priority levels starting at specified value -r --relative use relative timer instead of absolute -R --resolution check clock resolution, calling clock_gettime() many times. list of clock_gettime() values will be reported with -X -s --system use sys_nanosleep and sys_setitimer -S --smp Standard SMP testing: options -a -t -n and same priority of all threads -t --threads one thread per available processor -t [NUM] --threads=num number of threads: without NUM, threads = max_cpus without -t default = 1 -T TRACE --tracer=tracer set tracing function configured tracers: blk function_graph wakeup_rt wakeup function nop -u --unbuffered force unbuffered output for live processing -U --numa Standard NUMA testing (similar to SMP option) thread data structures allocated from local node -v --verbose output values on stdout for statistics format: n:c:v n=tasknum c=count v=value in us -w --wakeup task wakeup tracing (used with -b) -W --wakeuprt rt task wakeup tracing (used with -b) -X --dbg_cyclictest print info useful for debugging cyclictest -y POLI --policy=poli policy of realtime thread, POLI may be fifo(default) or rr format: --policy=fifo(default) or --policy=rr
59 Thread Behavior Options -a [NUM] --affinity run thread #N on processor #N, if possible with NUM pin all threads to the processor NUM -c CLOCK --clock=clock select clock 0 = CLOCK_MONOTONIC (default) 1 = CLOCK_REALTIME -d DIST --distance=dist distance of thread intervals in us default=500 -i INTV --interval=intv base interval of thread in us default=1000 -m --mlockall lock current and future memory allocations -n --nanosleep use clock_nanosleep -p PRIO --prio=prio priority of highest prio thread -Q --priospread spread priority levels starting at specified value -r --relative use relative timer instead of absolute -s --system use sys_nanosleep and sys_setitimer -S --smp Standard SMP testing: options -a -t -n and same priority of all threads -t --threads one thread per available processor -t [NUM] --threads=num number of threads: without NUM, threads = max_cpus without -t default = 1 -U --numa Standard NUMA testing (similar to SMP option) thread data structures allocated from local node -y POLI --policy=poli policy of realtime thread, POLI may be fifo(default) or rr format: --policy=fifo(default) or --policy=rr side effect, sets -d0 -h --histogram=us dump a latency histogram to stdout after the run (with same priority about many threads) US is the max time to be be tracked in microseconds -H --histofall=us same as -h except with an additional summary column
60 Benchmark and System Options -D --duration=t specify a length for the test run default is in seconds, but 'm', 'h', or 'd' maybe added to modify value to minutes, hours or days -l LOOPS --loops=loops number of loops: default=0(endless) -e --latency=pm_qos write PM_QOS to /dev/cpu_dma_latency
61 Display Options -g MAX --of_max=max Report time in ms (up to MAX) for histogram overflows -h --histogram=us dump a latency histogram to stdout after the run (with same priority about many threads) US is the max time to be be tracked in microseconds -H --histofall=us same as -h except with an additional summary column -M --refresh_on_max delay updating the screen until a new max latency is hit -N --nsecs print results in ns instead of us (default us) -o RED --oscope=red oscilloscope mode, reduce verbose output by RED -q --quiet print only a summary on exit -u --unbuffered force unbuffered output for live processing -v --verbose output values on stdout for statistics format: n:c:v n=tasknum c=count v=value in us
62 Debug Options -b USEC --breaktrace=usec send break trace command when latency > USEC -B --preemptirqs both preempt and irqsoff tracing (used with -b) -C --context context switch tracing (used with -b) -E --event event tracing (used with -b) -f --ftrace function trace (when -b is active) -I --irqsoff Irqsoff tracing (used with -b) -O TOPT --traceopt=topt trace option -P --preemptoff Preempt off tracing (used with -b) -R --resolution check clock resolution, calling clock_gettime() many times. list of clock_gettime() values will be reported with -X -T TRACE --tracer=tracer set tracing function configured tracers: blk function_graph wakeup_rt wakeup function nop -w --wakeup task wakeup tracing (used with -b) -W --wakeuprt rt task wakeup tracing (used with -b) -X --dbg_cyclictest print info useful for debugging cyclictest
63 Debug Options No time to describe in this talk Hooks to invoke various tools that can capture the cause of large latencies
64 Options Trivia Options parsing is not robust - example 1 # affinity will be 0 $ cyclictest -t -l100 -a0 $ cyclictest -t -l100 -a 0 $ cyclictest -t -l100 -a7 -a0 # affinity will be 7, with no error message $ cyclictest -t -l100 -a7 -a 0 -a cpu affinity
65 Options Trivia Options parsing is not robust - example 2 $ cyclictest -ant T: 0 (26978) P: 0 I:1000 C: 2091 Min: $ cyclictest -an -t T: 0 (26980) P: 0 I:1000 C: 1928 Min: T: 1 (26981) P: 0 I:1500 C: 1285 Min: -a cpu affinity -n clock_nanosleep() -t one thread per cpu
66 Options Trivia Options parsing is not robust Best Practice: - do not combine options - specify each separately with a leading "-"
67 Third Data Format Report each latency $ cyclictest -q -n -t1 -p 48 -l v
68
69 Hitting the RT sched throttle /proc/sys/kernel/sched_rt_runtime_us /proc/sys/kernel/sched_rt_period_us cyclictest: SCHED_FIFO priority=80 background load: - continuous - SCHED_FIFO priority=40
70
71
72
73
74
75 Hitting the RT sched throttle /proc/sys/kernel/sched_rt_runtime_us /proc/sys/kernel/sched_rt_period_us cyclictest: SCHED_NORMAL background load: - continuous - SCHED_FIFO priority=40
76 Hitting the RT sched throttle Why is this measurement interesting??? Gives a picture of how much cpu is NOT used by the real time tasks
77
78
79
80
81 Unusual Uses of Cyclictest Rough measurement of response time of a task, without instrumenting task. cyclictest latency =~ task latency + task work duration This is not an accurate measurement, but it does provide a rough picture.
82 Response Time of a Task Cyclictest: (1) SCHED_FIFO priority=30 baseline latency (2) SCHED_FIFO priority=80 approximation of task response time background load: - busy loop, random number of iterations - SCHED_FIFO priority=40

83
84
85
86 Response Time of a Task Cyclictest: (1) SCHED_FIFO priority=30 baseline latency (2) SCHED_FIFO priority=80 approximation of task response time background load: - recursive scp of a panda root file system - SCHED_FIFO priority=40
87
88
89
90 Demo - oscilloscope cyclictest_0.85 -t1 -n -p80 -i100 -o10 -v \ oscilloscope >/dev/null

91 oscilloscope screen shot
92 Fourth Data Format Report time of each histogram overflow Should be in next version of cyclictest (0.86?) $ cyclictest -q -h 400 -g 1000 The same information can be extracted from the third data format (-v), but this method is lower overhead.
93 Finding and Building git clone \ git://git.kernel.org/pub/scm/linux/kernel/git/clrkwllms/rt-tests.git source: src/cyclictest/cyclictest.c self-hosted: make self-hosted without NUMA: make NUMA=0 cross-build without NUMA: make NUMA=0 CC="${CROSS_COMPILE}gcc"
94 Review - Simple methodology captures all sources of latency fairly well - Options must be used with care - Options are powerful - Different data formats are each useful - Debug features can capture the cause of large latencies
95 THE END Thank you for your attention...
96 Questions?
97 How to get a copy of the slides 1) leave a business card with me 2) frank.rowand@sonymobile.com
98
Adventures In Real-Time Performance Tuning, Part 2
 Adventures In Real-Time Performance Tuning, Part 2 The real-time for Linux patchset does not guarantee adequate real-time behavior for all target platforms. When using real-time Linux on a new platform
Adventures In Real-Time Performance Tuning, Part 2 The real-time for Linux patchset does not guarantee adequate real-time behavior for all target platforms. When using real-time Linux on a new platform
Red Hat Enterprise MRG 1.3 Tuna User Guide
 Red Hat Enterprise MRG 1.3 Tuna User Guide Using Tuna to perform advanced tuning procedures for the MRG Realtime component of the Red Hat Enterprise MRG distributed computing platform Edition 2 Lana Brindley
Red Hat Enterprise MRG 1.3 Tuna User Guide Using Tuna to perform advanced tuning procedures for the MRG Realtime component of the Red Hat Enterprise MRG distributed computing platform Edition 2 Lana Brindley
How Linux RT_PREEMPT Works
 How Linux RT_PREEMPT Works A common observation about real time systems is that the cost of the increased determinism of real time is decreased throughput and increased average latency. This presentation
How Linux RT_PREEMPT Works A common observation about real time systems is that the cost of the increased determinism of real time is decreased throughput and increased average latency. This presentation
Hardware Latencies How to flush them out (A use case) Steven Rostedt Red Hat
 Steven Rostedt Red Hat") Hardware Latencies How to flush them out (A use case) Steven Rostedt Red Hat Here s a story, of a lovely lady... No this isn t the Brady Bunch Nor is it about a lovely lady But it probably could have been
Hardware Latencies How to flush them out (A use case) Steven Rostedt Red Hat Here s a story, of a lovely lady... No this isn t the Brady Bunch Nor is it about a lovely lady But it probably could have been
Evaluation of Real-time Performance in Embedded Linux. Hiraku Toyooka, Hitachi. LinuxCon Europe Hitachi, Ltd All rights reserved.
 Evaluation of Real-time Performance in Embedded Linux LinuxCon Europe 2014 Hiraku Toyooka, Hitachi 1 whoami Hiraku Toyooka Software engineer at Hitachi " Working on operating systems Linux (mainly) for
Evaluation of Real-time Performance in Embedded Linux LinuxCon Europe 2014 Hiraku Toyooka, Hitachi 1 whoami Hiraku Toyooka Software engineer at Hitachi " Working on operating systems Linux (mainly) for
Realtime BoF Session RealTime Testing Best Practice of RealTime WG YungJoon Jung
 Realtime BoF Session RealTime Testing Best Practice of RealTime WG YungJoon Jung April 15th, 2008 CE Linux Forum 1 Contents Introduction Current RealTime Testing Methods Plan April 15th, 2008 CE Linux
Realtime BoF Session RealTime Testing Best Practice of RealTime WG YungJoon Jung April 15th, 2008 CE Linux Forum 1 Contents Introduction Current RealTime Testing Methods Plan April 15th, 2008 CE Linux
Path analysis vs. empirical determination of a system's real-time capabilities: The crucial role of latency tests
 Path analysis vs. empirical determination of a system's real-time capabilities: The crucial role of latency tests Carsten Emde Open Source Automation Development Lab (OSADL) eg Issues leading to system
Path analysis vs. empirical determination of a system's real-time capabilities: The crucial role of latency tests Carsten Emde Open Source Automation Development Lab (OSADL) eg Issues leading to system
Realtime Tuning 101. Tuning Applications on Red Hat MRG Realtime Clark Williams
 Realtime Tuning 101 Tuning Applications on Red Hat MRG Realtime Clark Williams Agenda Day One Terminology and Concepts Realtime Linux differences from stock Linux Tuning Tools for Tuning Tuning Tools Lab
Realtime Tuning 101 Tuning Applications on Red Hat MRG Realtime Clark Williams Agenda Day One Terminology and Concepts Realtime Linux differences from stock Linux Tuning Tools for Tuning Tuning Tools Lab
e-ale-rt-apps Building Real-Time Applications for Linux Version c CC-BY SA4
 e-ale-rt-apps Building Real-Time Applications for Linux Version 20181023 ii The E-ALE (Embedded Apprentice Linux Engineer) is a series of seminars held at existing conferences covering topics which are
e-ale-rt-apps Building Real-Time Applications for Linux Version 20181023 ii The E-ALE (Embedded Apprentice Linux Engineer) is a series of seminars held at existing conferences covering topics which are
Testing real-time Linux: What to test and how.
 Testing real-time Linux: What to test and how. Sripathi Kodi sripathik@in.ibm.com Agenda IBM Linux Technology Center What is a real-time Operating System? Enterprise real-time Real-Time patches for Linux
Testing real-time Linux: What to test and how. Sripathi Kodi sripathik@in.ibm.com Agenda IBM Linux Technology Center What is a real-time Operating System? Enterprise real-time Real-Time patches for Linux
Measuring the impacts of the Preempt-RT patch
 Measuring the impacts of the Preempt-RT patch maxime.chevallier@smile.fr October 25, 2017 RT Linux projects Simulation platform : bi-xeon, lots ot RAM 200µs wakeup latency, networking Test bench : Intel
Measuring the impacts of the Preempt-RT patch maxime.chevallier@smile.fr October 25, 2017 RT Linux projects Simulation platform : bi-xeon, lots ot RAM 200µs wakeup latency, networking Test bench : Intel
Abstract. Testing Parameters. Introduction. Hardware Platform. Native System
 Abstract In this paper, we address the latency issue in RT- XEN virtual machines that are available in Xen 4.5. Despite the advantages of applying virtualization to systems, the default credit scheduler
Abstract In this paper, we address the latency issue in RT- XEN virtual machines that are available in Xen 4.5. Despite the advantages of applying virtualization to systems, the default credit scheduler
Musings on Analysis of Measurements of a Real-Time Workload
 Musings on Analysis of Measurements of a Real-Time Workload Analysis of real-time performance is often focused on the worst case "bad" value, such as maximum latency or maximum interrupt disabled time.
Musings on Analysis of Measurements of a Real-Time Workload Analysis of real-time performance is often focused on the worst case "bad" value, such as maximum latency or maximum interrupt disabled time.
A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT. Felipe Cerqueira and Björn Brandenburg
 A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT Felipe Cerqueira and Björn Brandenburg July 9th, 2013 1 Linux as a Real-Time OS 2 Linux as a Real-Time OS Optimizing system responsiveness
A Comparison of Scheduling Latency in Linux, PREEMPT_RT, and LITMUS RT Felipe Cerqueira and Björn Brandenburg July 9th, 2013 1 Linux as a Real-Time OS 2 Linux as a Real-Time OS Optimizing system responsiveness
Chapter 6: CPU Scheduling. Operating System Concepts 9 th Edition
 Chapter 6: CPU Scheduling Silberschatz, Galvin and Gagne 2013 Chapter 6: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Real-Time
Chapter 6: CPU Scheduling Silberschatz, Galvin and Gagne 2013 Chapter 6: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Real-Time
SFO The Linux Kernel Scheduler. Viresh Kumar (PMWG)
") SFO17-421 The Linux Kernel Scheduler Viresh Kumar (PMWG) Topics CPU Scheduler The O(1) scheduler Current scheduler design Scheduling classes schedule() Scheduling classes and policies Sched class: STOP
SFO17-421 The Linux Kernel Scheduler Viresh Kumar (PMWG) Topics CPU Scheduler The O(1) scheduler Current scheduler design Scheduling classes schedule() Scheduling classes and policies Sched class: STOP
The PREEMPT_RT Approach To Real Time
 The PREEMPT_RT Approach To Real Time Wu Zhangjin / Falcon wuzhangjin@gmail.com 泰晓科技 TinyLab.org http://tinylab.org March 21, 2014 The PREEMPT_RT Approach To Real Time March 21, 2014 1 / 51 Overview 1 Introduction
The PREEMPT_RT Approach To Real Time Wu Zhangjin / Falcon wuzhangjin@gmail.com 泰晓科技 TinyLab.org http://tinylab.org March 21, 2014 The PREEMPT_RT Approach To Real Time March 21, 2014 1 / 51 Overview 1 Introduction
How to get realistic C-states latency and residency? Vincent Guittot
 How to get realistic C-states latency and residency? Vincent Guittot Agenda Overview Exit latency Enter latency Residency Conclusion Overview Overview PMWG uses hikey960 for testing our dev on b/l system
How to get realistic C-states latency and residency? Vincent Guittot Agenda Overview Exit latency Enter latency Residency Conclusion Overview Overview PMWG uses hikey960 for testing our dev on b/l system
Understanding Real Time Linux. Alex Shi
 Understanding Real Time Linux Alex Shi Agenda What s real time OS RTL project status RT testing and tracing Reasons of latency and solutions for them Resources Summary What s real time OS Real time and
Understanding Real Time Linux Alex Shi Agenda What s real time OS RTL project status RT testing and tracing Reasons of latency and solutions for them Resources Summary What s real time OS Real time and
CS 326: Operating Systems. CPU Scheduling. Lecture 6
 CS 326: Operating Systems CPU Scheduling Lecture 6 Today s Schedule Agenda? Context Switches and Interrupts Basic Scheduling Algorithms Scheduling with I/O Symmetric multiprocessing 2/7/18 CS 326: Operating
CS 326: Operating Systems CPU Scheduling Lecture 6 Today s Schedule Agenda? Context Switches and Interrupts Basic Scheduling Algorithms Scheduling with I/O Symmetric multiprocessing 2/7/18 CS 326: Operating
ò mm_struct represents an address space in kernel ò task represents a thread in the kernel ò A task points to 0 or 1 mm_structs
 Last time We went through the high-level theory of scheduling algorithms Scheduling Today: View into how Linux makes its scheduling decisions Don Porter CSE 306 Lecture goals Understand low-level building
Last time We went through the high-level theory of scheduling algorithms Scheduling Today: View into how Linux makes its scheduling decisions Don Porter CSE 306 Lecture goals Understand low-level building
Scheduling. Don Porter CSE 306
 Scheduling Don Porter CSE 306 Last time ò We went through the high-level theory of scheduling algorithms ò Today: View into how Linux makes its scheduling decisions Lecture goals ò Understand low-level
Scheduling Don Porter CSE 306 Last time ò We went through the high-level theory of scheduling algorithms ò Today: View into how Linux makes its scheduling decisions Lecture goals ò Understand low-level
Inferring Temporal Behaviours Through Kernel Tracing
 Inferring Temporal Behaviours Through Kernel Tracing Paolo Rallo, Nicola Manica, Luca Abeni University of Trento Trento - Italy prallo@gmail.com, nicola.manica@disi.unitn.it, luca.abeni@unitn.it Technical
Inferring Temporal Behaviours Through Kernel Tracing Paolo Rallo, Nicola Manica, Luca Abeni University of Trento Trento - Italy prallo@gmail.com, nicola.manica@disi.unitn.it, luca.abeni@unitn.it Technical
Ftrace - What s new. Since my last explanation of ftrace (from v3.18) Steven Rostedt 25/10/ VMware Inc. All rights reserved.
 Steven Rostedt 25/10/ VMware Inc. All rights reserved.") Ftrace - What s new Since my last explanation of ftrace (from v3.18) Steven Rostedt 25/10/2017 2017 VMware Inc. All rights reserved. What ftrace did (and still does) Function tracing Function graph tracing
Ftrace - What s new Since my last explanation of ftrace (from v3.18) Steven Rostedt 25/10/2017 2017 VMware Inc. All rights reserved. What ftrace did (and still does) Function tracing Function graph tracing
2013 Toshiba Corporation
 2013 Toshiba Corporation Who am I? Yoshitake Kobayashi (YOSHI) Chief Specialist at Corporate Software Engineering Center, TOSHIBA CORPORATION Work on embedded operating systems Linux RTOS TOPPERS (uitron),
2013 Toshiba Corporation Who am I? Yoshitake Kobayashi (YOSHI) Chief Specialist at Corporate Software Engineering Center, TOSHIBA CORPORATION Work on embedded operating systems Linux RTOS TOPPERS (uitron),
Microkernel Construction
 Real-Time Scheduling Preemptive Priority-Based Scheduling User assigns each thread a set of scheduling attributes (time quantum, priority) When the current thread s time quantum is exhausted, the kernel
Real-Time Scheduling Preemptive Priority-Based Scheduling User assigns each thread a set of scheduling attributes (time quantum, priority) When the current thread s time quantum is exhausted, the kernel
T. Cucinotta Real-Time Systems Lab (ReTiS) Scuola Superiore Sant'Anna Pisa Italy 1. Real-Time Scheduling on Linux and SCHED_DEADLINE
 Scuola Superiore Sant'Anna Pisa Italy 1. Real-Time Scheduling on Linux and SCHED_DEADLINE") T. Cucinotta Real-Time Systems Lab (ReTiS) Scuola Superiore Sant'Anna Pisa Italy 1 Real-Time Scheduling on Linux and SCHED_DEADLINE Linux CPU Schedulers Scheduling classes and policies Classes listed in
T. Cucinotta Real-Time Systems Lab (ReTiS) Scuola Superiore Sant'Anna Pisa Italy 1 Real-Time Scheduling on Linux and SCHED_DEADLINE Linux CPU Schedulers Scheduling classes and policies Classes listed in
ADVANCED trouble-shooting of real-time systems. Bernd Hufmann, Ericsson
 ADVANCED trouble-shooting of real-time systems Bernd Hufmann, Ericsson AGENDA 1 Introduction 2 3 Timing Analysis 4 References 5 Q&A Trace Compass Overview ADVANCED trouble-shooting of critical real-time
ADVANCED trouble-shooting of real-time systems Bernd Hufmann, Ericsson AGENDA 1 Introduction 2 3 Timing Analysis 4 References 5 Q&A Trace Compass Overview ADVANCED trouble-shooting of critical real-time
Computer Science Window-Constrained Process Scheduling for Linux Systems
 Window-Constrained Process Scheduling for Linux Systems Richard West Ivan Ganev Karsten Schwan Talk Outline Goals of this research DWCS background DWCS implementation details Design of the experiments
Window-Constrained Process Scheduling for Linux Systems Richard West Ivan Ganev Karsten Schwan Talk Outline Goals of this research DWCS background DWCS implementation details Design of the experiments
CEC 450 Real-Time Systems
 CEC 450 Real-Time Systems Lecture 7 Review October 9, 2017 Sam Siewert Coming Next Finish Up with Recount of Mars Pathfinder and Unbounded Priority Inversion Mike Jone s Page (Microsoft) Glenn Reeves on
CEC 450 Real-Time Systems Lecture 7 Review October 9, 2017 Sam Siewert Coming Next Finish Up with Recount of Mars Pathfinder and Unbounded Priority Inversion Mike Jone s Page (Microsoft) Glenn Reeves on
PROCESS SCHEDULING II. CS124 Operating Systems Fall , Lecture 13
 PROCESS SCHEDULING II CS124 Operating Systems Fall 2017-2018, Lecture 13 2 Real-Time Systems Increasingly common to have systems with real-time scheduling requirements Real-time systems are driven by specific
PROCESS SCHEDULING II CS124 Operating Systems Fall 2017-2018, Lecture 13 2 Real-Time Systems Increasingly common to have systems with real-time scheduling requirements Real-time systems are driven by specific
Case Study: Challenges and Benefits in Integrating Real Time patch in PowerPc Based Media System
 Case Study: Challenges and Benefits in Integrating Real Time patch in PowerPc Based Media System Manikandan Ramachandran Infosys Technologies Limited Electronic City, Hosur Road, Bengaluru 560100,India
Case Study: Challenges and Benefits in Integrating Real Time patch in PowerPc Based Media System Manikandan Ramachandran Infosys Technologies Limited Electronic City, Hosur Road, Bengaluru 560100,India
The CMXBug Manual. The CMXBug Manual
 The CMX CMXBug TM debugger provides the ability to view and modify different aspects of the CMX multitasking operating system environment, while application code is running. CMXBug runs as a task, usually
The CMX CMXBug TM debugger provides the ability to view and modify different aspects of the CMX multitasking operating system environment, while application code is running. CMXBug runs as a task, usually
When the OS gets in the way
 When the OS gets in the way (and what you can do about it) Mark Price @epickrram LMAX Exchange Linux When the OS gets in the way (and what you can do about it) Mark Price @epickrram LMAX Exchange It s
When the OS gets in the way (and what you can do about it) Mark Price @epickrram LMAX Exchange Linux When the OS gets in the way (and what you can do about it) Mark Price @epickrram LMAX Exchange It s
Latency on preemptible Real-Time Linux
 Appendix 1 Latency on preemptible Real-Time Linux on DCP-SH7780 Contents 1.1 Getting Started.......................................... 1 1.2 Rtrtc Driver........................................... 2 1.3
Appendix 1 Latency on preemptible Real-Time Linux on DCP-SH7780 Contents 1.1 Getting Started.......................................... 1 1.2 Rtrtc Driver........................................... 2 1.3
Enhancing Linux Scheduler Scalability
 Enhancing Linux Scheduler Scalability Mike Kravetz IBM Linux Technology Center Hubertus Franke, Shailabh Nagar, Rajan Ravindran IBM Thomas J. Watson Research Center {mkravetz,frankeh,nagar,rajancr}@us.ibm.com
Enhancing Linux Scheduler Scalability Mike Kravetz IBM Linux Technology Center Hubertus Franke, Shailabh Nagar, Rajan Ravindran IBM Thomas J. Watson Research Center {mkravetz,frankeh,nagar,rajancr}@us.ibm.com
CS307: Operating Systems
 CS307: Operating Systems Chentao Wu 吴晨涛 Associate Professor Dept. of Computer Science and Engineering Shanghai Jiao Tong University SEIEE Building 3-513 wuct@cs.sjtu.edu.cn Download Lectures ftp://public.sjtu.edu.cn
CS307: Operating Systems Chentao Wu 吴晨涛 Associate Professor Dept. of Computer Science and Engineering Shanghai Jiao Tong University SEIEE Building 3-513 wuct@cs.sjtu.edu.cn Download Lectures ftp://public.sjtu.edu.cn
Ineffective and effective way to find out latency bottlenecks by Ftrace
 Ineffective and effective way to find out latency bottlenecks by Ftrace Yoshitake Kobayashi Advanced Software Technology Group Corporate Software Engineering Center TOSHIBA CORPORATION 16 Feb, 212 Copyright
Ineffective and effective way to find out latency bottlenecks by Ftrace Yoshitake Kobayashi Advanced Software Technology Group Corporate Software Engineering Center TOSHIBA CORPORATION 16 Feb, 212 Copyright
Chapter 5: CPU Scheduling
 Chapter 5: CPU Scheduling Chapter 5: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Operating Systems Examples Algorithm Evaluation
Chapter 5: CPU Scheduling Chapter 5: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Operating Systems Examples Algorithm Evaluation
Introduction to Operating Systems Prof. Chester Rebeiro Department of Computer Science and Engineering Indian Institute of Technology, Madras
 Introduction to Operating Systems Prof. Chester Rebeiro Department of Computer Science and Engineering Indian Institute of Technology, Madras Week - 04 Lecture 17 CPU Context Switching Hello. In this video
Introduction to Operating Systems Prof. Chester Rebeiro Department of Computer Science and Engineering Indian Institute of Technology, Madras Week - 04 Lecture 17 CPU Context Switching Hello. In this video
ò Paper reading assigned for next Tuesday ò Understand low-level building blocks of a scheduler User Kernel ò Understand competing policy goals
 Housekeeping Paper reading assigned for next Tuesday Scheduling Don Porter CSE 506 Memory Management Logical Diagram Binary Memory Formats Allocators Threads Today s Lecture Switching System to CPU Calls
Housekeeping Paper reading assigned for next Tuesday Scheduling Don Porter CSE 506 Memory Management Logical Diagram Binary Memory Formats Allocators Threads Today s Lecture Switching System to CPU Calls
Porting RT-preempt to Loongson2F
 Porting RT-preempt to Loongson2F Wu Zhangjin, Nicholas Mc Guire Distributed & Embedded System Lab, SISE, Lanzhou University, China Tianshui South Road 222,Lanzhou,P.R.China wuzhangjin@gmail.com, der.herr@hofr.at
Porting RT-preempt to Loongson2F Wu Zhangjin, Nicholas Mc Guire Distributed & Embedded System Lab, SISE, Lanzhou University, China Tianshui South Road 222,Lanzhou,P.R.China wuzhangjin@gmail.com, der.herr@hofr.at
Debugging realtime application with Ftrace
 Debugging realtime application with Ftrace Pierre Ficheux (pierre.ficheux@smile.fr) 02/2018 1 Disclaimer Poor English speaker! But good French speaker and writer :-) Loin du français je meurs (Louis-Ferdinand
Debugging realtime application with Ftrace Pierre Ficheux (pierre.ficheux@smile.fr) 02/2018 1 Disclaimer Poor English speaker! But good French speaker and writer :-) Loin du français je meurs (Louis-Ferdinand
W4118: advanced scheduling
 W4118: advanced scheduling Instructor: Junfeng Yang References: Modern Operating Systems (3 rd edition), Operating Systems Concepts (8 th edition), previous W4118, and OS at MIT, Stanford, and UWisc Outline
W4118: advanced scheduling Instructor: Junfeng Yang References: Modern Operating Systems (3 rd edition), Operating Systems Concepts (8 th edition), previous W4118, and OS at MIT, Stanford, and UWisc Outline
Comparison of soft real-time CPU scheduling in Linux kernel 2.6 series with Solaris 10
 Comparison of soft real-time CPU scheduling in Linux kernel 2.6 series with Solaris 10 Kristoffer Eriksson Philip Frising Department of Computer and Information Science Linköping University 1(15) 1. About
Comparison of soft real-time CPU scheduling in Linux kernel 2.6 series with Solaris 10 Kristoffer Eriksson Philip Frising Department of Computer and Information Science Linköping University 1(15) 1. About
Chapter 5: CPU Scheduling. Operating System Concepts Essentials 8 th Edition
 Chapter 5: CPU Scheduling Silberschatz, Galvin and Gagne 2011 Chapter 5: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Operating
Chapter 5: CPU Scheduling Silberschatz, Galvin and Gagne 2011 Chapter 5: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Operating
Linux - Not real-time!
 Linux - Not real-time! Date: 16.01.2015 Author(s): Michal Koziel www.bitvis.no 1 Abstract A system is said to be real-time if it can respond to external triggers and perform periodic tasks with deterministic
Linux - Not real-time! Date: 16.01.2015 Author(s): Michal Koziel www.bitvis.no 1 Abstract A system is said to be real-time if it can respond to external triggers and perform periodic tasks with deterministic
Visual Profiler. User Guide
 Visual Profiler User Guide Version 3.0 Document No. 06-RM-1136 Revision: 4.B February 2008 Visual Profiler User Guide Table of contents Table of contents 1 Introduction................................................
Visual Profiler User Guide Version 3.0 Document No. 06-RM-1136 Revision: 4.B February 2008 Visual Profiler User Guide Table of contents Table of contents 1 Introduction................................................
Application Testing under Realtime Linux. Luis Claudio R. Gonçalves Red Hat Realtime Team Software Engineer
 Application Testing under Realtime Linux Luis Claudio R. Gonçalves Red Hat Realtime Team Software Engineer Agenda * Realtime Basics * Linux and the PREEMPT_RT patch * About the Tests * Looking for bad
Application Testing under Realtime Linux Luis Claudio R. Gonçalves Red Hat Realtime Team Software Engineer Agenda * Realtime Basics * Linux and the PREEMPT_RT patch * About the Tests * Looking for bad
Adding Inter-event Capabilities to the Linux Trace Event Subsystem
 Adding Inter-event Capabilities to the Linux Trace Event Subsystem Tom Zanussi Intel Open Source Technology Center Safety Critical Systems ELC 2017, Feb 22 1 Trace Events Background Latency Example Design
Adding Inter-event Capabilities to the Linux Trace Event Subsystem Tom Zanussi Intel Open Source Technology Center Safety Critical Systems ELC 2017, Feb 22 1 Trace Events Background Latency Example Design
Scheduling, part 2. Don Porter CSE 506
 Scheduling, part 2 Don Porter CSE 506 Logical Diagram Binary Memory Formats Allocators Threads Today s Lecture Switching System to CPU Calls RCU scheduling File System Networking Sync User Kernel Memory
Scheduling, part 2 Don Porter CSE 506 Logical Diagram Binary Memory Formats Allocators Threads Today s Lecture Switching System to CPU Calls RCU scheduling File System Networking Sync User Kernel Memory
CPU Scheduling. Daniel Mosse. (Most slides are from Sherif Khattab and Silberschatz, Galvin and Gagne 2013)
") CPU Scheduling Daniel Mosse (Most slides are from Sherif Khattab and Silberschatz, Galvin and Gagne 2013) Basic Concepts Maximum CPU utilization obtained with multiprogramming CPU I/O Burst Cycle Process
CPU Scheduling Daniel Mosse (Most slides are from Sherif Khattab and Silberschatz, Galvin and Gagne 2013) Basic Concepts Maximum CPU utilization obtained with multiprogramming CPU I/O Burst Cycle Process
Process Scheduling Queues
 Process Control Process Scheduling Queues Job queue set of all processes in the system. Ready queue set of all processes residing in main memory, ready and waiting to execute. Device queues set of processes
Process Control Process Scheduling Queues Job queue set of all processes in the system. Ready queue set of all processes residing in main memory, ready and waiting to execute. Device queues set of processes
Evaluation of uclinux and PREEMPT_RT for Machine Control System
 Evaluation of uclinux and PREEMPT_RT for Machine Control System 2014/05/20 Hitachi, Ltd. Yokohama Research Lab Linux Technology Center Yoshihiro Hayashi yoshihiro.hayashi.cd@hitachi.com Agenda 1. Background
Evaluation of uclinux and PREEMPT_RT for Machine Control System 2014/05/20 Hitachi, Ltd. Yokohama Research Lab Linux Technology Center Yoshihiro Hayashi yoshihiro.hayashi.cd@hitachi.com Agenda 1. Background
Empirical Approximation and Impact on Schedulability
 Cache-Related Preemption and Migration Delays: Empirical Approximation and Impact on Schedulability OSPERT 2010, Brussels July 6, 2010 Andrea Bastoni University of Rome Tor Vergata Björn B. Brandenburg
Cache-Related Preemption and Migration Delays: Empirical Approximation and Impact on Schedulability OSPERT 2010, Brussels July 6, 2010 Andrea Bastoni University of Rome Tor Vergata Björn B. Brandenburg
Real-Time Systems Hermann Härtig Real-Time Operating Systems Brief Overview
 Real-Time Systems Hermann Härtig Real-Time Operating Systems Brief Overview 02/02/12 Outline Introduction Basic variants of RTOSes Real-Time paradigms Common requirements for all RTOSes High level resources
Real-Time Systems Hermann Härtig Real-Time Operating Systems Brief Overview 02/02/12 Outline Introduction Basic variants of RTOSes Real-Time paradigms Common requirements for all RTOSes High level resources
Real Time Linux patches: history and usage
 Real Time Linux patches: history and usage Presentation first given at: FOSDEM 2006 Embedded Development Room See www.fosdem.org Klaas van Gend Field Application Engineer for Europe Why Linux in Real-Time
Real Time Linux patches: history and usage Presentation first given at: FOSDEM 2006 Embedded Development Room See www.fosdem.org Klaas van Gend Field Application Engineer for Europe Why Linux in Real-Time
<Insert Picture Here> Boost Linux Performance with Enhancements from Oracle
 Boost Linux Performance with Enhancements from Oracle Chris Mason Director of Linux Kernel Engineering Linux Performance on Large Systems Exadata Hardware How large systems are different
Boost Linux Performance with Enhancements from Oracle Chris Mason Director of Linux Kernel Engineering Linux Performance on Large Systems Exadata Hardware How large systems are different
Scheduling. Today. Next Time Process interaction & communication
 Scheduling Today Introduction to scheduling Classical algorithms Thread scheduling Evaluating scheduling OS example Next Time Process interaction & communication Scheduling Problem Several ready processes
Scheduling Today Introduction to scheduling Classical algorithms Thread scheduling Evaluating scheduling OS example Next Time Process interaction & communication Scheduling Problem Several ready processes
Scheduling - Overview
 Scheduling - Overview Quick review of textbook scheduling Linux 2.4 scheduler implementation overview Linux 2.4 scheduler code Modified Linux 2.4 scheduler Linux 2.6 scheduler comments Possible Goals of
Scheduling - Overview Quick review of textbook scheduling Linux 2.4 scheduler implementation overview Linux 2.4 scheduler code Modified Linux 2.4 scheduler Linux 2.6 scheduler comments Possible Goals of
Process management. Scheduling
 Process management Scheduling Points of scheduler invocation (recap) User Kernel Return from system call Process Schedule Return from interrupt handler Timer interrupts to ensure OS control Return from
Process management Scheduling Points of scheduler invocation (recap) User Kernel Return from system call Process Schedule Return from interrupt handler Timer interrupts to ensure OS control Return from
L4-Linux Based System As A Platform For EPICS ioccore
 L4-Linux Based System As A Platform For EPICS ioccore J. Odagiri, N. Yamamoto and T. Katoh High Energy Research Accelerator Organization, KEK ICALEPCS 2001, Nov 28, San Jose Contents Backgrounds Causes
L4-Linux Based System As A Platform For EPICS ioccore J. Odagiri, N. Yamamoto and T. Katoh High Energy Research Accelerator Organization, KEK ICALEPCS 2001, Nov 28, San Jose Contents Backgrounds Causes
Chapter 6: CPU Scheduling. Operating System Concepts 9 th Edition
 Chapter 6: CPU Scheduling Silberschatz, Galvin and Gagne 2013 Chapter 6: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Real-Time
Chapter 6: CPU Scheduling Silberschatz, Galvin and Gagne 2013 Chapter 6: CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Real-Time
Reservation-Based Scheduling for IRQ Threads
 Reservation-Based Scheduling for IRQ Threads Luca Abeni, Nicola Manica, Luigi Palopoli luca.abeni@unitn.it, nicola.manica@gmail.com, palopoli@dit.unitn.it University of Trento, Trento - Italy Reservation-Based
Reservation-Based Scheduling for IRQ Threads Luca Abeni, Nicola Manica, Luigi Palopoli luca.abeni@unitn.it, nicola.manica@gmail.com, palopoli@dit.unitn.it University of Trento, Trento - Italy Reservation-Based
Chapter 5 CPU scheduling
 Chapter 5 CPU scheduling Contents Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Thread Scheduling Operating Systems Examples Java Thread Scheduling
Chapter 5 CPU scheduling Contents Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Thread Scheduling Operating Systems Examples Java Thread Scheduling
Preempt-RT Raspberry Linux. VMware Tiejun Chen
 Preempt-RT Raspberry Linux VMware Tiejun Chen The declaration of this development This is my personal exploration. This is not a roadmap or commitment from VMware. Agenda Motivation
Preempt-RT Raspberry Linux VMware Tiejun Chen The declaration of this development This is my personal exploration. This is not a roadmap or commitment from VMware. Agenda Motivation
CHAPTER 7 IMPLEMENTATION OF DYNAMIC VOLTAGE SCALING IN LINUX SCHEDULER
 73 CHAPTER 7 IMPLEMENTATION OF DYNAMIC VOLTAGE SCALING IN LINUX SCHEDULER 7.1 INTRODUCTION The proposed DVS algorithm is implemented on DELL INSPIRON 6000 model laptop, which has Intel Pentium Mobile Processor
73 CHAPTER 7 IMPLEMENTATION OF DYNAMIC VOLTAGE SCALING IN LINUX SCHEDULER 7.1 INTRODUCTION The proposed DVS algorithm is implemented on DELL INSPIRON 6000 model laptop, which has Intel Pentium Mobile Processor
Time::HiRes - High resolution alarm, sleep, gettimeofday, interval timers
 NAME SYNOPSIS Time::HiRes - High resolution alarm, sleep, gettimeofday, interval timers use Time::HiRes qw( usleep ualarm gettimeofday tv_interval nanosleep clock_gettime clock_getres clock_nanosleep clock
NAME SYNOPSIS Time::HiRes - High resolution alarm, sleep, gettimeofday, interval timers use Time::HiRes qw( usleep ualarm gettimeofday tv_interval nanosleep clock_gettime clock_getres clock_nanosleep clock
Chapter 5: Process Scheduling
 Chapter 5: Process Scheduling Chapter 5: Process Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Real-Time CPU Scheduling Operating Systems
Chapter 5: Process Scheduling Chapter 5: Process Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Thread Scheduling Multiple-Processor Scheduling Real-Time CPU Scheduling Operating Systems
CPU Scheduling. Operating Systems (Fall/Winter 2018) Yajin Zhou ( Zhejiang University
 Yajin Zhou ( Zhejiang University") Operating Systems (Fall/Winter 2018) CPU Scheduling Yajin Zhou (http://yajin.org) Zhejiang University Acknowledgement: some pages are based on the slides from Zhi Wang(fsu). Review Motivation to use threads
Operating Systems (Fall/Winter 2018) CPU Scheduling Yajin Zhou (http://yajin.org) Zhejiang University Acknowledgement: some pages are based on the slides from Zhi Wang(fsu). Review Motivation to use threads
Operating Systems. Process scheduling. Thomas Ropars.
 1 Operating Systems Process scheduling Thomas Ropars thomas.ropars@univ-grenoble-alpes.fr 2018 References The content of these lectures is inspired by: The lecture notes of Renaud Lachaize. The lecture
1 Operating Systems Process scheduling Thomas Ropars thomas.ropars@univ-grenoble-alpes.fr 2018 References The content of these lectures is inspired by: The lecture notes of Renaud Lachaize. The lecture
Chapter 5: CPU Scheduling. Operating System Concepts 8 th Edition,
 Chapter 5: CPU Scheduling Operating System Concepts 8 th Edition, Hanbat National Univ. Computer Eng. Dept. Y.J.Kim 2009 Chapter 5: Process Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms
Chapter 5: CPU Scheduling Operating System Concepts 8 th Edition, Hanbat National Univ. Computer Eng. Dept. Y.J.Kim 2009 Chapter 5: Process Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms
Parallel architectures are enforcing the need of managing parallel software efficiently Sw design, programming, compiling, optimizing, running
 S.Bartolini Department of Information Engineering University of Siena, Italy C.A. Prete Department of Information Engineering University of Pisa, Italy GREPS Workshop (PACT 07) Brasov, Romania. 16/09/2007
S.Bartolini Department of Information Engineering University of Siena, Italy C.A. Prete Department of Information Engineering University of Pisa, Italy GREPS Workshop (PACT 07) Brasov, Romania. 16/09/2007
Scheduling II. Today. Next Time. ! Proportional-share scheduling! Multilevel-feedback queue! Multiprocessor scheduling. !
 Scheduling II Today! Proportional-share scheduling! Multilevel-feedback queue! Multiprocessor scheduling Next Time! Memory management Scheduling with multiple goals! What if you want both good turnaround
Scheduling II Today! Proportional-share scheduling! Multilevel-feedback queue! Multiprocessor scheduling Next Time! Memory management Scheduling with multiple goals! What if you want both good turnaround
Paul E. McKenney, Distinguished Engineer IBM Linux Technology Center
 Ottawa Linux Symposium Real Time vs. Real Fast : How to Choose? Paul E. McKenney, Distinguished Engineer July 23, 2008 Overview 2008 Ottawa Linux Symposium What is Real Time and Real Fast, Anyway??? Example
Ottawa Linux Symposium Real Time vs. Real Fast : How to Choose? Paul E. McKenney, Distinguished Engineer July 23, 2008 Overview 2008 Ottawa Linux Symposium What is Real Time and Real Fast, Anyway??? Example
Real-Time KVM for the Masses Unrestricted Siemens AG All rights reserved
 Siemens Corporate Technology August 2015 Real-Time KVM for the Masses Unrestricted Siemens AG 2015. All rights reserved Real-Time KVM for the Masses Agenda Motivation & requirements Reference architecture
Siemens Corporate Technology August 2015 Real-Time KVM for the Masses Unrestricted Siemens AG 2015. All rights reserved Real-Time KVM for the Masses Agenda Motivation & requirements Reference architecture
Measuring Interrupt Latency
 NXP Semiconductors Document Number: AN12078 Application Note Rev. 0, 10/2017 Measuring Interrupt Latency 1. Introduction The term interrupt latency refers to the delay between the start of an Interrupt
NXP Semiconductors Document Number: AN12078 Application Note Rev. 0, 10/2017 Measuring Interrupt Latency 1. Introduction The term interrupt latency refers to the delay between the start of an Interrupt
RT extensions/applications of general-purpose OSs
 EECS 571 Principles of Real-Time Embedded Systems Lecture Note #15: RT extensions/applications of general-purpose OSs General-Purpose OSs for Real-Time Why? (as discussed before) App timing requirements
EECS 571 Principles of Real-Time Embedded Systems Lecture Note #15: RT extensions/applications of general-purpose OSs General-Purpose OSs for Real-Time Why? (as discussed before) App timing requirements
RAS Enhancement Activities for Mission-Critical Linux Systems
 RAS Enhancement Activities for MissionCritical Linux Systems Hitachi Ltd. Yoshihiro YUNOMAE 01 MissionCritical Systems We apply Linux to missioncritical systems. Banking systems/carrier backend systems/train
RAS Enhancement Activities for MissionCritical Linux Systems Hitachi Ltd. Yoshihiro YUNOMAE 01 MissionCritical Systems We apply Linux to missioncritical systems. Banking systems/carrier backend systems/train
A Predictable RTOS. Mantis Cheng Department of Computer Science University of Victoria
 A Predictable RTOS Mantis Cheng Department of Computer Science University of Victoria Outline I. Analysis of Timeliness Requirements II. Analysis of IO Requirements III. Time in Scheduling IV. IO in Scheduling
A Predictable RTOS Mantis Cheng Department of Computer Science University of Victoria Outline I. Analysis of Timeliness Requirements II. Analysis of IO Requirements III. Time in Scheduling IV. IO in Scheduling
INF1060: Introduction to Operating Systems and Data Communication. Pål Halvorsen. Wednesday, September 29, 2010
 INF1060: Introduction to Operating Systems and Data Communication Pål Halvorsen Wednesday, September 29, 2010 Overview Processes primitives for creation and termination states context switches processes
INF1060: Introduction to Operating Systems and Data Communication Pål Halvorsen Wednesday, September 29, 2010 Overview Processes primitives for creation and termination states context switches processes
Review of the Stable Realtime Release Process
 Review of the Stable Realtime Release Process An unscientific, slightly opinionated stab at the current status... With the intent of generating some discussion. Frank Rowand, Sony Network Entertainment
Review of the Stable Realtime Release Process An unscientific, slightly opinionated stab at the current status... With the intent of generating some discussion. Frank Rowand, Sony Network Entertainment
238P: Operating Systems. Lecture 14: Process scheduling
 238P: Operating Systems Lecture 14: Process scheduling This lecture is heavily based on the material developed by Don Porter Anton Burtsev November, 2017 Cooperative vs preemptive What is cooperative multitasking?
238P: Operating Systems Lecture 14: Process scheduling This lecture is heavily based on the material developed by Don Porter Anton Burtsev November, 2017 Cooperative vs preemptive What is cooperative multitasking?
Process Concepts. CSC400 - Operating Systems. 3. Process Concepts. J. Sumey
 CSC400 - Operating Systems 3. Process Concepts J. Sumey Overview Concurrency Processes & Process States Process Accounting Interrupts & Interrupt Processing Interprocess Communication CSC400 - Process
CSC400 - Operating Systems 3. Process Concepts J. Sumey Overview Concurrency Processes & Process States Process Accounting Interrupts & Interrupt Processing Interprocess Communication CSC400 - Process
Real-Time Performance of Linux. OS Latency
 Real-Time Performance of Linux Among others: A Measurement-Based Analysis of the Real- Time Performance of Linux (L. Abeni, A. Goel, C. Krasic, J. Snow, J. Walpole) [RTAS 2002] OS Latency Definition [OS
Real-Time Performance of Linux Among others: A Measurement-Based Analysis of the Real- Time Performance of Linux (L. Abeni, A. Goel, C. Krasic, J. Snow, J. Walpole) [RTAS 2002] OS Latency Definition [OS
Context Switching & CPU Scheduling
 Context Switching & CPU Scheduling Nima Honarmand Administrivia Midterm: next Tuesday, 10/17, in class Will include everything discussed until then Will cover: Class lectures, slides and discussions All
Context Switching & CPU Scheduling Nima Honarmand Administrivia Midterm: next Tuesday, 10/17, in class Will include everything discussed until then Will cover: Class lectures, slides and discussions All
CPU Scheduling: Objectives
 CPU Scheduling: Objectives CPU scheduling, the basis for multiprogrammed operating systems CPU-scheduling algorithms Evaluation criteria for selecting a CPU-scheduling algorithm for a particular system
CPU Scheduling: Objectives CPU scheduling, the basis for multiprogrammed operating systems CPU-scheduling algorithms Evaluation criteria for selecting a CPU-scheduling algorithm for a particular system
10 th AUTOSAR Open Conference
 10 th AUTOSAR Open Conference Yuchen Zhou, Thomas E Fuhrman, Prathap Venugopal General Motors Scheduling Techniques for Automated Driving Systems using the AUTOSAR Adaptive Platform AUTOSAR Nov-2017 Agenda
10 th AUTOSAR Open Conference Yuchen Zhou, Thomas E Fuhrman, Prathap Venugopal General Motors Scheduling Techniques for Automated Driving Systems using the AUTOSAR Adaptive Platform AUTOSAR Nov-2017 Agenda
Chapter 6: CPU Scheduling. Operating System Concepts 9 th Edition
 Chapter 6: CPU Scheduling Silberschatz, Galvin and Gagne 2013 Objectives To introduce CPU scheduling, which is the basis for multiprogrammed operating systems To describe various CPU-scheduling algorithms
Chapter 6: CPU Scheduling Silberschatz, Galvin and Gagne 2013 Objectives To introduce CPU scheduling, which is the basis for multiprogrammed operating systems To describe various CPU-scheduling algorithms
Operating Systems CS 323 Ms. Ines Abbes
 Taibah University College of Community of Badr Computer Science Department Operating Systems CS71/CS72 جامعة طيبة كلية المجتمع ببدر قسم علوم الحاسب مقرر: نظم التشغيل Operating Systems CS 323 Ms. Ines Abbes
Taibah University College of Community of Badr Computer Science Department Operating Systems CS71/CS72 جامعة طيبة كلية المجتمع ببدر قسم علوم الحاسب مقرر: نظم التشغيل Operating Systems CS 323 Ms. Ines Abbes
CS Computer Systems. Lecture 6: Process Scheduling
 CS 5600 Computer Systems Lecture 6: Process Scheduling Scheduling Basics Simple Schedulers Priority Schedulers Fair Share Schedulers Multi-CPU Scheduling Case Study: The Linux Kernel 2 Setting the Stage
CS 5600 Computer Systems Lecture 6: Process Scheduling Scheduling Basics Simple Schedulers Priority Schedulers Fair Share Schedulers Multi-CPU Scheduling Case Study: The Linux Kernel 2 Setting the Stage
CPU Scheduling. Basic Concepts. Histogram of CPU-burst Times. Dispatcher. CPU Scheduler. Alternating Sequence of CPU and I/O Bursts
 CS307 Basic Concepts Maximize CPU utilization obtained with multiprogramming CPU Scheduling CPU I/O Burst Cycle Process execution consists of a cycle of CPU execution and I/O wait CPU burst distribution
CS307 Basic Concepts Maximize CPU utilization obtained with multiprogramming CPU Scheduling CPU I/O Burst Cycle Process execution consists of a cycle of CPU execution and I/O wait CPU burst distribution
System Wide Tracing User Need
 System Wide Tracing User Need dominique toupin ericsson com April 2010 About me Developer Tool Manager at Ericsson, helping Ericsson sites to develop better software efficiently Background
System Wide Tracing User Need dominique toupin ericsson com April 2010 About me Developer Tool Manager at Ericsson, helping Ericsson sites to develop better software efficiently Background
CSCI-GA Operating Systems Lecture 3: Processes and Threads -Part 2 Scheduling Hubertus Franke
 CSCI-GA.2250-001 Operating Systems Lecture 3: Processes and Threads -Part 2 Scheduling Hubertus Franke frankeh@cs.nyu.edu Processes Vs Threads The unit of dispatching is referred to as a thread or lightweight
CSCI-GA.2250-001 Operating Systems Lecture 3: Processes and Threads -Part 2 Scheduling Hubertus Franke frankeh@cs.nyu.edu Processes Vs Threads The unit of dispatching is referred to as a thread or lightweight
EECS 571 Principles of Real-Time Embedded Systems. Lecture Note #10: More on Scheduling and Introduction of Real-Time OS
 EECS 571 Principles of Real-Time Embedded Systems Lecture Note #10: More on Scheduling and Introduction of Real-Time OS Kang G. Shin EECS Department University of Michigan Mode Changes Changes in mission
EECS 571 Principles of Real-Time Embedded Systems Lecture Note #10: More on Scheduling and Introduction of Real-Time OS Kang G. Shin EECS Department University of Michigan Mode Changes Changes in mission
Barrelfish Project ETH Zurich. Message Notifications
 Barrelfish Project ETH Zurich Message Notifications Barrelfish Technical Note 9 Barrelfish project 16.06.2010 Systems Group Department of Computer Science ETH Zurich CAB F.79, Universitätstrasse 6, Zurich
Barrelfish Project ETH Zurich Message Notifications Barrelfish Technical Note 9 Barrelfish project 16.06.2010 Systems Group Department of Computer Science ETH Zurich CAB F.79, Universitätstrasse 6, Zurich
Using ROS with RedHawk Linux on the NVIDIA Jetson TX2
 A Concurrent Real-Time White Paper 2881 Gateway Drive Pompano Beach, FL 33069 (954) 974-1700 www.concurrent-rt.com Using ROS with RedHawk Linux on the NVIDIA Jetson TX2 By: Jason Baietto Chief Systems
A Concurrent Real-Time White Paper 2881 Gateway Drive Pompano Beach, FL 33069 (954) 974-1700 www.concurrent-rt.com Using ROS with RedHawk Linux on the NVIDIA Jetson TX2 By: Jason Baietto Chief Systems
Kernel Interrupt: A Major Overhaul
 Kernel Interrupt: A Major Overhaul - APIC Initialization & - Vector Allocation Dou Liyang douly.fnst@cn.fujitsu.com June 20 2018 Copyright 2018 FUJITSU LIMITED Outline Basics of an interrupt What's next?
Kernel Interrupt: A Major Overhaul - APIC Initialization & - Vector Allocation Dou Liyang douly.fnst@cn.fujitsu.com June 20 2018 Copyright 2018 FUJITSU LIMITED Outline Basics of an interrupt What's next?
CS370 Operating Systems
 CS370 Operating Systems Colorado State University Yashwant K Malaiya Fall 2017 Lecture 10 Slides based on Text by Silberschatz, Galvin, Gagne Various sources 1 1 Chapter 6: CPU Scheduling Basic Concepts
CS370 Operating Systems Colorado State University Yashwant K Malaiya Fall 2017 Lecture 10 Slides based on Text by Silberschatz, Galvin, Gagne Various sources 1 1 Chapter 6: CPU Scheduling Basic Concepts
Analysis of the BFS Scheduler in FreeBSD
 CS2106R Final Report Analysis of the BFS Scheduler in FreeBSD By Vaarnan Drolia Department of Computer Science School of Computing National University of Singapore 2011/12 CS2106R Final Report Analysis
CS2106R Final Report Analysis of the BFS Scheduler in FreeBSD By Vaarnan Drolia Department of Computer Science School of Computing National University of Singapore 2011/12 CS2106R Final Report Analysis